

Real-Time Wildfire Detection Algorithm Based on VIIRS Fire Product and Himawari-8 Data


 ,
,  ,
,
Abstract

1. Introduction
2. Study Area and Data
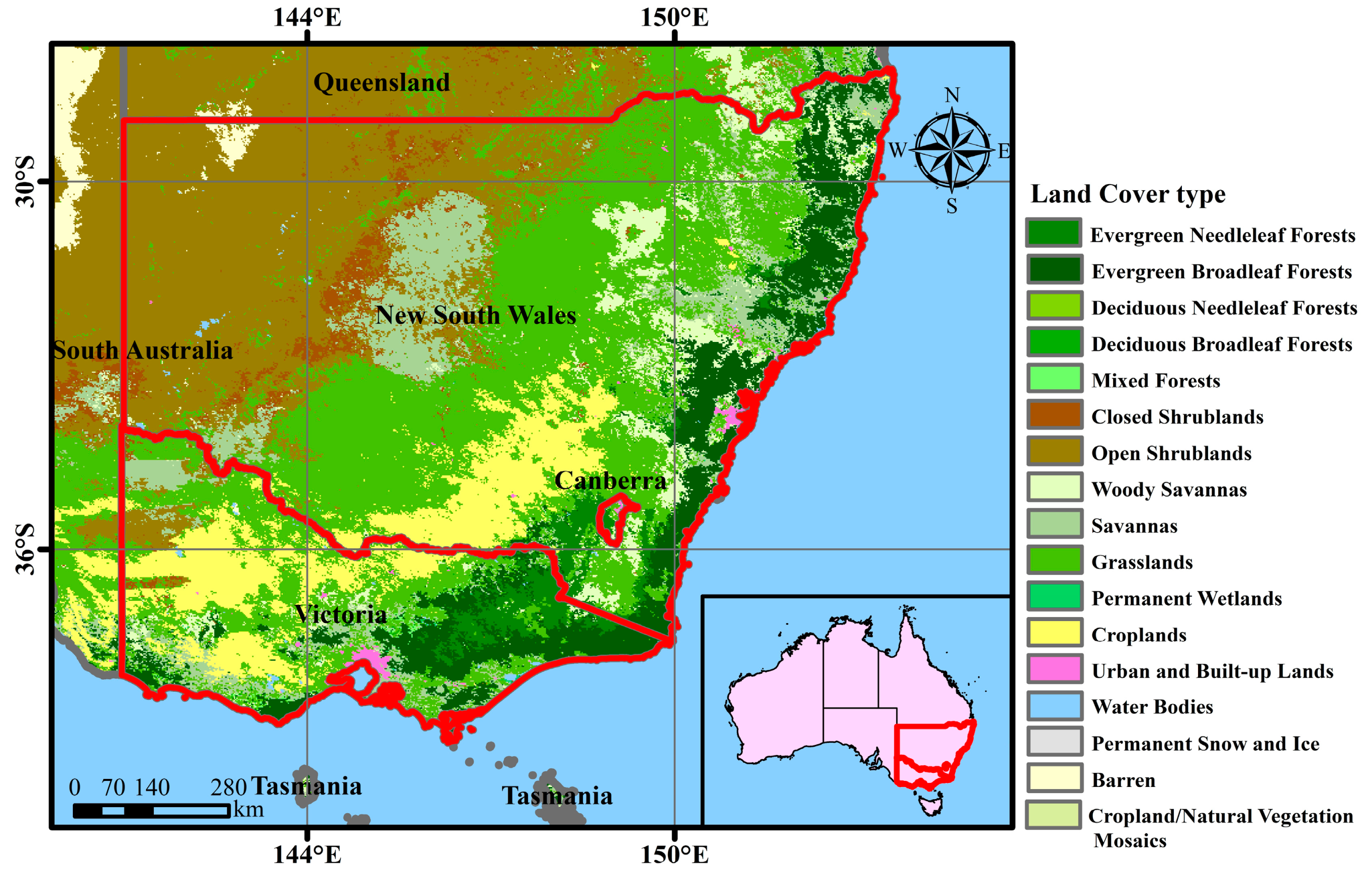
2.1. Study Area
2.2. VNP14IMG Fire Product
2.3. Himawari-8 L1 Grid Data
2.4. Himawari-8 L2WLF Product
2.5. MCD12Q1.006 Land Use Product
3. Method
3.1. Cloud and Water Masks
3.2. Potential Fire Detection
3.3. Random Forest
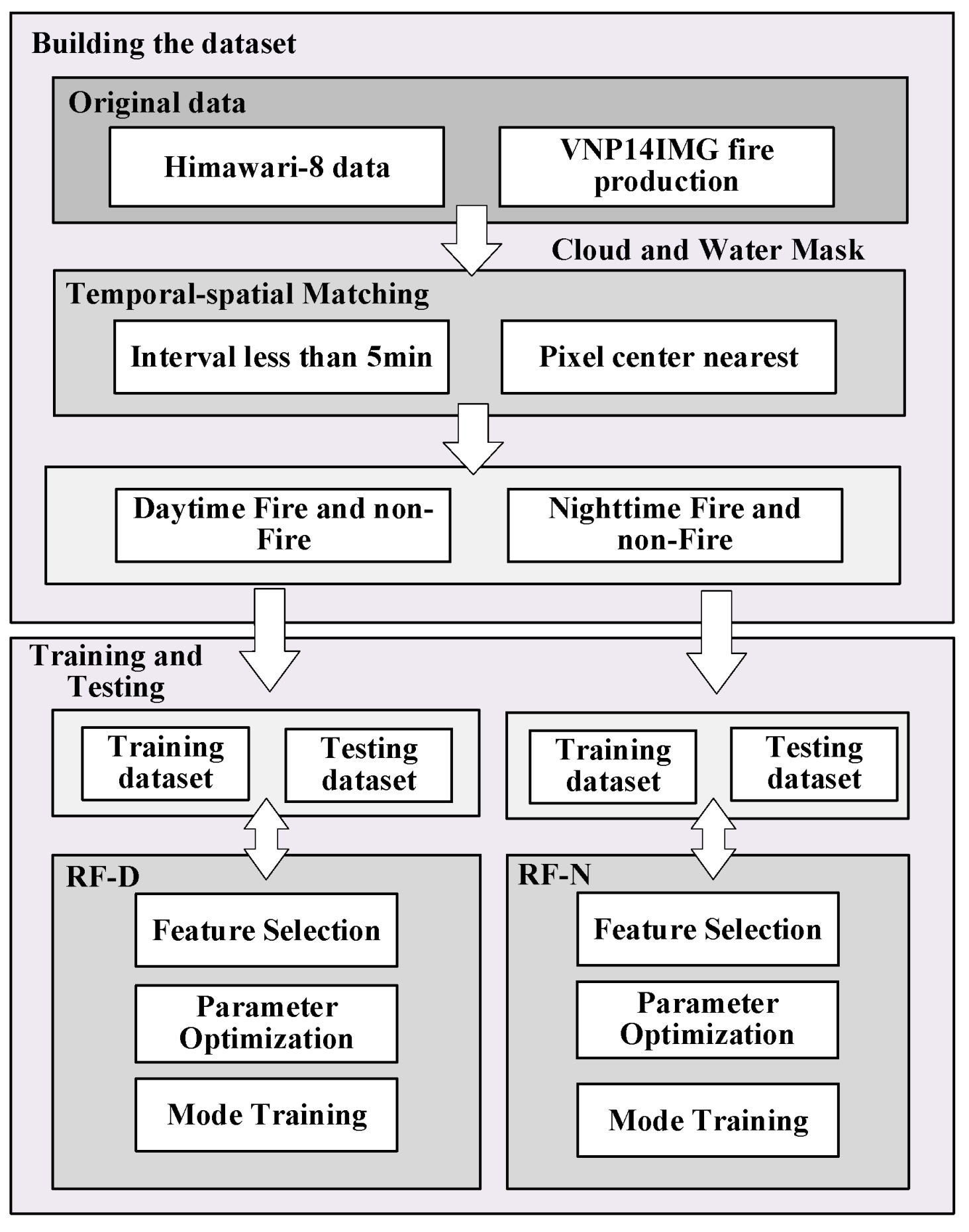
3.3.1. Building the Dataset
3.3.2. Feature Selection
3.3.3. Optimal Model Parameter Selection
3.3.4. Accuracy Assessment
4. Results
4.1. Model Accuracy Assessment
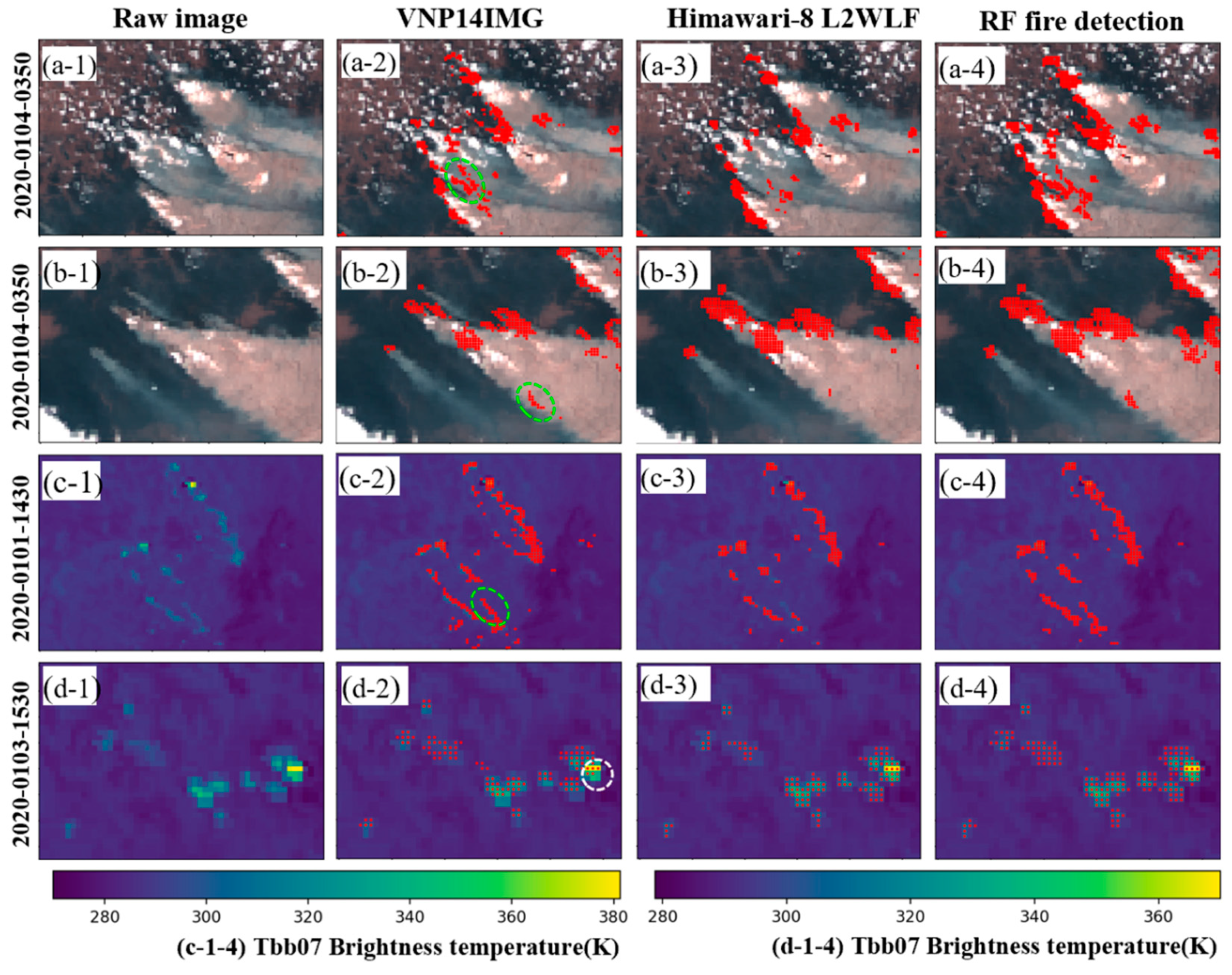
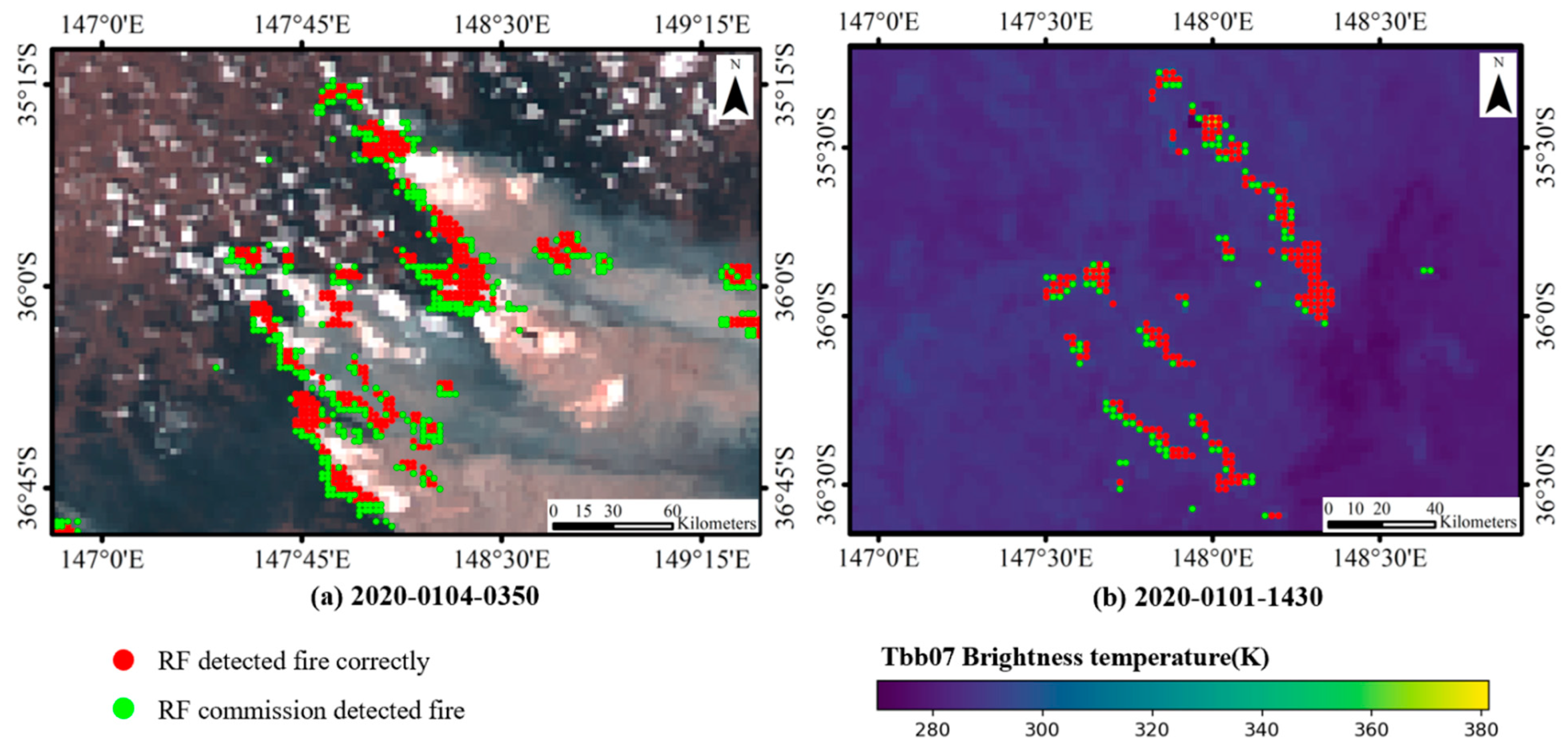
4.2. Wildfires Monitoring
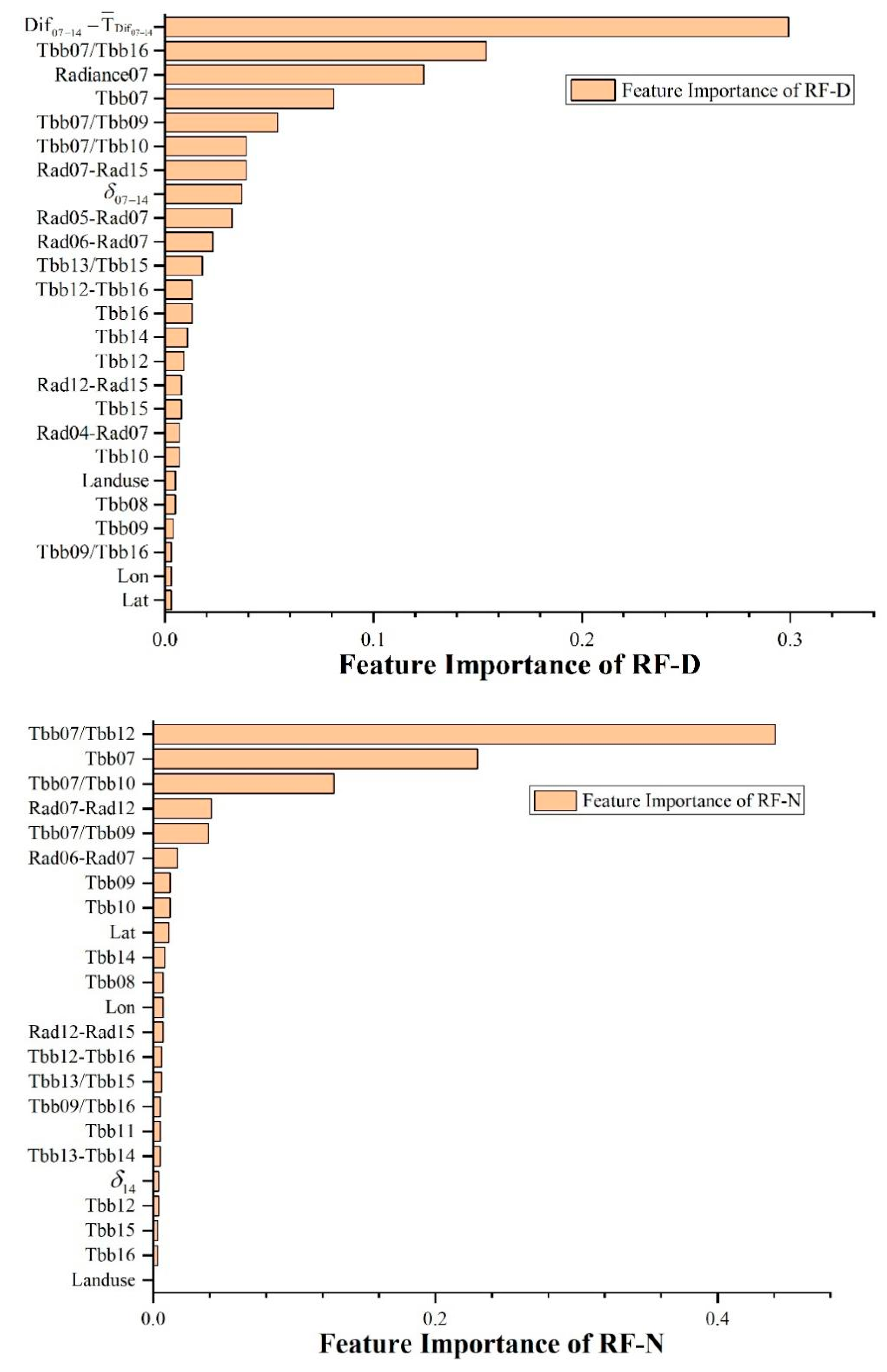
4.3. Variable Importance Assessment in RF Classification
5. Discussion
5.1. Pixel Representation
5.2. Feature Selection
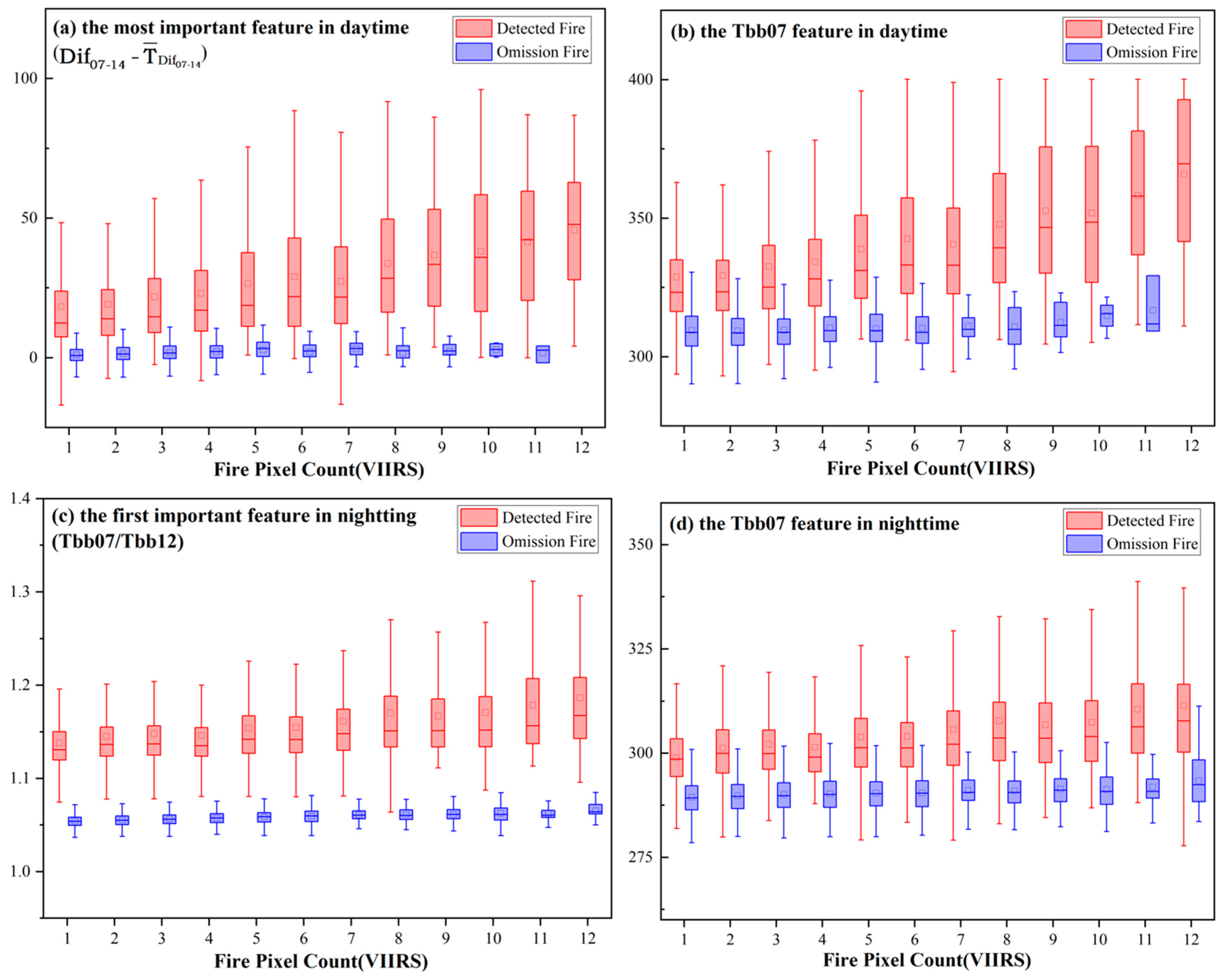
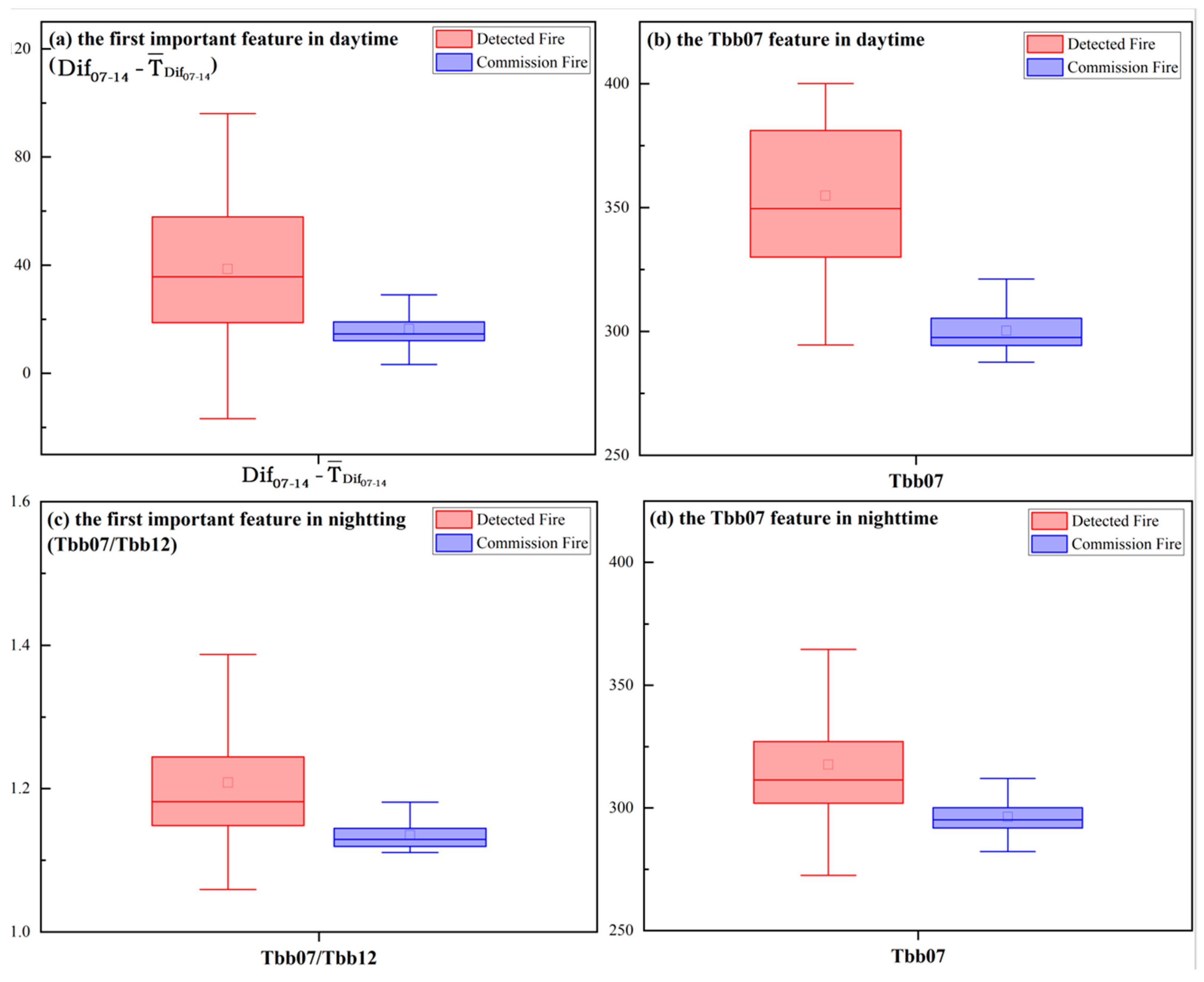
5.3. Omission and Commission Error Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Seydi, S.T.; Akhoondzadeh, M.; Amani, M.; Mahdavi, S. Wildfire Damage Assessment over Australia Using Sentinel-2 Imagery and MODIS Land Cover Product within the Google Earth Engine Cloud Platform. Remote Sens. 2021, 13, 220. [Google Scholar] [CrossRef]
- Flannigan, M.; Cantin, A.S.; de Groot, W.J.; Wotton, M.; Newbery, A.; Gowman, L.M. Global wildland fire season severity in the 21st century. For. Ecol. Manag. 2013, 294, 54–61. [Google Scholar] [CrossRef]
- Flannigan, M.; Krawchuk, M.; Wotton, M.; Johnston, L. Implications of changing climate for global Wildland fire. Int. J. Wildland Fire 2009, 18, 483–507. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, J.; Jian, H.; Fan, X.; Yan, F. Fire Diurnal Cycle Derived from a Combination of the Himawari-8 and VIIRS Satellites to Improve Fire Emission Assessments in Southeast Australia. Remote Sens. 2021, 13, 2852. [Google Scholar] [CrossRef]
- Xu, G.; Zhong, X. Real-time wildfire detection and tracking in Australia using geostationary satellite: Himawari-8. Remote Sens. Lett. 2017, 8, 1052–1061. [Google Scholar] [CrossRef]
- Flannigan, M.; Haar, T.H. Forest fire monitoring using the NOAA satellite AVHRR. Can. J. For. Res. 1986, 16, 975–982. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Justice, C.O.; Flynn, L.P.; Kendall, J.D.; Prins, E.M.; Giglio, L.; Ward, D.E.; Menzel, W.P.; Setzer, A.W. Potential global fire monitoring from EOS-MODIS. J. Geophys. Res. Atmos. 1998, 103, 32215–32238. [Google Scholar] [CrossRef]
- Flasse, S.P.; Ceccato, P. A contextual algorithm for AVHRR fire detection. Int. J. Remote Sens. 1996, 17, 419–424. [Google Scholar] [CrossRef]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375m active fire detection data product: Algorithm description and initial assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375m active fire detection product for direct burned area mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S. Assessment of the Utility of the Advanced Himawari Imager to Detect Active Fire over Australia. In Proceedings of the ISPRS—International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B8, pp. 65–71. [Google Scholar] [CrossRef]
- Hally, B.; Wallace, L.; Reinke, K.; Jones, S. A Broad-Area Method for the Diurnal Characterisation of Upwelling Medium Wave Infrared Radiation. Remote Sens. 2017, 9, 167. [Google Scholar] [CrossRef]
- Wickramasinghe, C.H.; Jones, S.; Reinke, K.; Wallace, L. Development of a Multi-Spatial Resolution Approach to the Surveillance of Active Fire Lines Using Himawari-8. Remote Sens. 2016, 8, 932. [Google Scholar] [CrossRef]
- Chen, H.; Duan, S.; Ge, X.; Huang, S.; Wang, T.; Xu, D.; Xu, B. Multi-temporal remote sensing fire detection based on GBDT in Yunnan area. In Proceedings of the 2020 2nd International Conference on Machine Learning, Big Data and Business Intelligence (MLBDBI), Taiyuan, China, 23–25 October 2020; pp. 469–473. [Google Scholar]
- Jang, E.; Kang, Y.; Im, J.; Lee, D.-W.; Yoon, J.; Kim, S.-K. Detection and Monitoring of Forest Fires Using Himawari-8 Geostationary Satellite Data in South Korea. Remote Sens. 2019, 11, 271. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, X.; Chen, J.; Ma, S.; Lu, Y.; Han, W. Wildfire detection through deep learning based on Himawari-8 satellites platform. Int. J. Remote Sens. 2022, 43, 5040–5058. [Google Scholar] [CrossRef]
- Kang, Y.; Jang, E.; Im, J.; Kwon, C. A deep learning model using geostationary satellite data for forest fire detection with reduced detection latency. GISci. Remote Sens. 2022, 59, 2019–2035. [Google Scholar] [CrossRef]
- Hassini, A.; Farid, B.; Noureddine, B.; Belbachir, A. Active Fire Monitoring with Level 1.5 MSG Satellite Images. Am. J. Appl. Sci. 2009, 6, 157–166. [Google Scholar] [CrossRef]
- Filizzola, C.; Corrado, R.; Marchese, F.; Mazzeo, G.; Paciello, R.; Pergola, N.; Tramutoli, V. RST-FIRES, an exportable algorithm for early-fire detection and monitoring: Description, implementation, and field validation in the case of the MSG-SEVIRI sensor. Remote Sens. Environ. 2016, 186, 196–216. [Google Scholar] [CrossRef]
- Rostami, A.; Shah-Hosseini, R.; Asgari, S.; Zarei, A.; Aghdami-Nia, M.; Homayouni, S. Active Fire Detection from Landsat-8 Imagery Using Deep Multiple Kernel Learning. Remote Sens. 2022, 14, 992. [Google Scholar] [CrossRef]
- Sulova, A.; Jokar Arsanjani, J. Exploratory Analysis of Driving Force of Wildfires in Australia: An Application of Machine Learning within Google Earth Engine. Remote Sens. 2021, 13, 10. [Google Scholar] [CrossRef]
- Milanović, S.; Marković, N.; Pamučar, D.; Gigović, L.; Kostić, P.; Milanović, S.D. Forest Fire Probability Mapping in Eastern Serbia: Logistic Regression versus Random Forest Method. Forests 2021, 12, 5. [Google Scholar] [CrossRef]
- Zhang, Y.; He, B.; Kong, P.; Xu, H.; Zhang, Q.; Quan, X.; Gengke, L. Near Real-Time Wildfire Detection in Southwestern China Using Himawari-8 Data. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 8416–8419. [Google Scholar]
- Giglio, L.; Csiszar, I.; Restás, Á.; Morisette, J.T.; Schroeder, W.; Morton, D.; Justice, C.O. Active fire detection and characterization with the advanced spaceborne thermal emission and reflection radiometer (ASTER). Remote Sens. Environ. 2008, 112, 3055–3063. [Google Scholar] [CrossRef]
- Csiszar, I.A.; Morisette, J.T.; Giglio, L. Validation of active fire detection from moderate-resolution satellite sensors: The MODIS example in northern eurasia. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1757–1764. [Google Scholar] [CrossRef]
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS active fire detection products using ASTER and ETM+ data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Morisette, J.; Giglio, L.; Csiszar, I.; Setzer, A.; Schroeder, W.; Morton, D.; Justice, C. Validation of MODIS Active Fire Detection Products Derived from Two Algorithms. Earth Interact 2005, 9, 1–25. [Google Scholar] [CrossRef]
- Morisette, J.T.; Giglio, L.; Csiszar, I.; Justice, C.O. Validation of the MODIS active fire product over Southern Africa with ASTER data. Int. J. Remote Sens. 2005, 26, 4239–4264. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Hennessy, K.; Lucas, C.; Nicholls, N.; Bathols, J.; Suppiah, R.; Ricketts, J. Climate Change Impacts on Fire-Weather in South-East Australia; Csiro Publishing: Collingwood, Australia, 2005. [Google Scholar]
- Zhang, T.; Wooster, M.J.; Xu, W. Approaches for synergistically exploiting VIIRS I- and M-Band data in regional active fire detection and FRP assessment: A demonstration with respect to agricultural residue burning in Eastern China. Remote Sens. Environ. 2017, 198, 407–424. [Google Scholar] [CrossRef]
- Fu, Y.; Li, R.; Wang, X.; Bergeron, Y.; Valeria, O.; Chavardès, R.D.; Wang, Y.; Hu, J. Fire Detection and Fire Radiative Power in Forests and Low-Biomass Lands in Northeast Asia: MODIS versus VIIRS Fire Products. Remote Sens. 2020, 12, 2870. [Google Scholar] [CrossRef]
- Xu, W.; Wooster, M.J.; Kaneko, T.; He, J.; Zhang, T.; Fisher, D. Major advances in geostationary fire radiative power (FRP) retrieval over Asia and Australia stemming from use of Himarawi-8 AHI. Remote Sens. Environ. 2017, 193, 138–149. [Google Scholar] [CrossRef]
- Yang, Y.; Sun, W.; Chi, Y.; Yan, X.; Fan, H.; Yang, X.; Ma, Z.; Wang, Q.; Zhao, C. Machine learning-based retrieval of day and night cloud macrophysical parameters over East Asia using Himawari-8 data. Remote Sens. Environ. 2022, 273, 112971. [Google Scholar] [CrossRef]
- User Guide to Collection 6 MODIS Land Cover (MCD12Q1 and MCD12C1) Product. Available online: https://lpdaac.usgs.gov/documents/101/MCD12_User_Guide_V6.pdf (accessed on 14 May 2018).
- Roberts, G.J.; Wooster, M.J. Fire Detection and Fire Characterization Over Africa Using Meteosat SEVIRI. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1200–1218. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.; Freeborn, P.H.; Xu, W.; Govaerts, Y.; Beeby, R.; He, J.; Lattanzio, A.; Fisher, D.; Mullen, R. LSA SAF Meteosat FRP products—Part 1: Algorithms, product contents, and analysis. Atmos. Chem. Phys. 2015, 15, 13217–13239. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Liu, T.; Abd-Elrahman, A.; Morton, J.; Wilhelm, V.L. Comparing fully convolutional networks, random forest, support vector machine, and patch-based deep convolutional neural networks for object-based wetland mapping using images from small unmanned aircraft system. GISci. Remote Sens. 2018, 55, 243–264. [Google Scholar] [CrossRef]
- Jang, E.; Im, J.; Park, G.-H.; Park, Y.-G. Estimation of Fugacity of Carbon Dioxide in the East Sea Using In Situ Measurements and Geostationary Ocean Color Imager Satellite Data. Remote Sens. 2017, 9, 821. [Google Scholar] [CrossRef]
- Zhang, C.; Smith, M.; Fang, C. Evaluation of Goddard’s LiDAR, hyperspectral, and thermal data products for mapping urban land-cover types. GISci. Remote Sens. 2018, 55, 90–109. [Google Scholar] [CrossRef]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J.E. Landsat-8 vs. Sentinel-2: Examining the added value of sentinel-2′s red-edge bands to land-use and land-cover mapping in Burkina Faso. GISci. Remote Sens. 2018, 55, 331–354. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Park, S.; Im, J.; Park, S.; Yoo, C.; Han, H.; Rhee, J. Classification and Mapping of Paddy Rice by Combining Landsat and SAR Time Series Data. Remote Sens. 2018, 10, 447. [Google Scholar] [CrossRef]
- Yoo, C.; Im, J.; Park, S.; Quackenbush, L.J. Estimation of daily maximum and minimum air temperatures in urban landscapes using MODIS time series satellite data. ISPRS J. Photogramm. Remote Sens. 2018, 137, 149–162. [Google Scholar] [CrossRef]
- Guo, Z.; Du, S. Mining parameter information for building extraction and change detection with very high-resolution imagery and GIS data. GISci. Remote Sens. 2017, 54, 38–63. [Google Scholar] [CrossRef]
- Lu, Z.; Im, J.; Rhee, J.; Hodgson, M. Building type classification using spatial and landscape attributes derived from LiDAR remote sensing data. Landsc. Urban Plan. 2014, 130, 134–148. [Google Scholar] [CrossRef]
- Richardson, H.J.; Hill, D.J.; Denesiuk, D.R.; Fraser, L.H. A comparison of geographic datasets and field measurements to model soil carbon using random forests and stepwise regressions (British Columbia, Canada). GISci. Remote Sens. 2017, 54, 573–591. [Google Scholar] [CrossRef]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J.; Brisco, B. Wetland classification in Newfoundland and Labrador using multi-source SAR and optical data integration. GISci. Remote Sens. 2017, 54, 779–796. [Google Scholar] [CrossRef]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Dedieu, G. Assessing the robustness of Random Forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, D.; Luo, L.; Pokhrel, Y.; Deb, K.; Huang, J.; Ran, Y. Detecting irrigation extent, frequency, and timing in a heterogeneous arid agricultural region using MODIS time series, Landsat imagery, and ancillary data. Remote Sens. Environ. 2018, 204, 197–211. [Google Scholar] [CrossRef]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Yadav, K.; Huete, A. A 30-m landsat-derived cropland extent product of Australia and China using random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. Remote Sens. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Ghasemloo, N.; Matkan, A.A.; Alimohammadi, A.; Aghighi, H.; Mirbagheri, B. Estimating the Agricultural Farm Soil Moisture Using Spectral Indices of Landsat 8, and Sentinel-1, and Artificial Neural Networks. J. Geovis. Spat. Anal. 2022, 6, 19. [Google Scholar] [CrossRef]
- Diaz-Uriarte, R.; Alvarez de Andrés, S. Gene Selection and Classification of Microarray Data Using Random Forest. BMC Bioinform. 2006, 7, 3. [Google Scholar] [CrossRef] [PubMed]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C. Variable selection using random forests. Pattern Recognit. Lett. 2010, 31, 2225–2236. [Google Scholar] [CrossRef]
- Yu, F.; Wu, X.; Shao, X.; Kondratovich, V. Evaluation of Himawari-8 AHI geospatial calibration accuracy using SNPP VIIRS SNO data. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2925–2928. [Google Scholar]
- Wickramasinghe, C.; Wallace, L.; Reinke, K.; Jones, S. Intercomparison of Himawari-8 AHI-FSA with MODIS and VIIRS active fire products. Int. J. Digit. Earth 2020, 13, 457–473. [Google Scholar] [CrossRef]
- Stehman, S.V.; Hansen, M.C.; Broich, M.; Potapov, P.V. Adapting a global stratified random sample for regional estimation of forest cover change derived from satellite imagery. Remote Sens. Environ. 2011, 115, 650–658. [Google Scholar] [CrossRef]
- Lazar, J.; Feng, J.H.; Hochheiser, H. (Eds.) Chapter 5—Surveys. In Research Methods in Human Computer Interaction, 2nd ed.; Morgan Kaufmann: Boston, MA, USA, 2017; pp. 105–133. [Google Scholar]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene Selection for Cancer Classification using Support Vector Machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. GISci. Remote Sens. 2018, 55, 221–242. [Google Scholar] [CrossRef]
- Forman, G.; Scholz, M. Apples-to-Apples in Cross-Validation Studies: Pitfalls in Classifier Performance Measurement ABSTRACT. SIGKDD Explor. 2010, 12, 49–57. [Google Scholar] [CrossRef]
- Courtial, A.; Touya, G.; Zhang, X. Constraint-Based Evaluation of Map Images Generalized by Deep Learning. J. Geovis. Spat. Anal. 2022, 6, 13. [Google Scholar] [CrossRef]
- Minh, H.V.; Avtar, R.; Mohan, G.; Misra, P.; Kurasaki, M. Monitoring and Mapping of Rice Cropping Pattern in Flooding Area in the Vietnamese Mekong Delta Using Sentinel-1A Data: A Case of An Giang Province. ISPRS Int. J. Geo-Inf. 2019, 8, 211. [Google Scholar] [CrossRef]
- Uddin, M.S.; Czajkowski, K.P. Performance Assessment of Spatial Interpolation Methods for the Estimation of Atmospheric Carbon Dioxide in the Wider Geographic Extent. J. Geovis. Spat. Anal. 2022, 6, 10. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2012, 12, 2825–2830. [Google Scholar]
- README_H08_L2WLF. Available online: ftp://ftp.ptree.jaxa.jp/pub/README_H08_L2WLF.txt (accessed on 12 January 2023).
- Li, F.; Zhang, X.; Kondragunta, S.; Schmidt, C.C.; Holmes, C.D. A preliminary evaluation of GOES-16 active fire product using Landsat-8 and VIIRS active fire data, and ground-based prescribed fire records. Remote Sens. Environ. 2020, 237, 111600. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Himawari-8 AHI Band | Bandwidth (µm) | Central Wavelength (µm) | Spatial Resolution (km) | Purpose |
|---|---|---|---|---|
| 3 | 0.03 | 0.64 | 2 | Cloud Mask |
| 4 | 0.02 | 0.86 | 2 | Cloud Mask |
| 6 | 0.02 | 2.26 | 2 | Water Mask |
| 7 | 0.22 | 3.85 | 2 | Fire detection |
| 8 | 0.37 | 6.25 | 2 | Fire detection |
| 9 | 0.12 | 6.95 | 2 | Fire detection |
| 10 | 0.17 | 7.35 | 2 | Fire detection |
| 11 | 0.32 | 8.60 | 2 | Fire detection |
| 12 | 0.18 | 9.63 | 2 | Fire detection |
| 13 | 0.30 | 10.45 | 2 | Fire detection |
| 14 | 0.20 | 11.20 | 2 | Fire detection |
| 15 | 0.30 | 12.35 | 2 | Fire detection |
| 16 | 0.20 | 13.30 | 2 | Fire detection |
| Original band features | Tbb07, Tbb08, Tbb09, Tbb010, Tbb11, Tbb12, Tbb13, Tbb14, Tbb15, Tbb16, Lat, Lon |
| Band calculation features | Tbb07-Tbb11, Tbb07-Tbb12, Tbb07-Tbb13, Tbb07-Tbb14, Tbb07-Tbb15, Tbb12-Tbb16, Tbb13-Tbb14, Tbb13-Tbb15, Tbb07/Tbb09, Tbb07/Tbb10, Tbb07/Tbb11, Tbb07/Tbb12, Tbb07/Tbb13, Tbb07/Tbb14, Tbb07/Tbb15, Tbb07/Tbb16, Tbb09/Tbb16, Tbb13/Tbb15, Rad04-Rad07, Rad05-Rad07, Rad06-Rad07, Rad07-Rad12, Rad07-Rad15, Rad12-Rad15, Rad07 |
| Spatial features | , , , , |
| Auxiliary data | MCD12Q1.006 |
| Error Matrix | Recall/% | Precision/% | F1-Score/% | OA/% | |||
|---|---|---|---|---|---|---|---|
| RF-D | Predicted non-fire | Predicted fire | |||||
| Reference non-fire | 103,750 | 190 | 93.70 | 86.66 | 90.04 | 99.74 | |
| Reference fire | 83 | 1234 | |||||
| RF-N | Predicted non-fire | Predicted fire | |||||
| Reference non-fire | 93,799 | 364 | 88.70 | 78.27 | 83.16 | 99.44 | |
| Reference fire | 167 | 1311 | |||||
| Sample Area | Himawari-8 L2WLF Product | RF Models | ||||
|---|---|---|---|---|---|---|
| Recall/% | Recall*/% | Precision/% | Recall/% | Recall*/% | Precision/% | |
| 1 | 80 | 45.26 | 66.29 | 98.57 | 82.46 | 54.43 |
| 2 | 88.96 | 75.12 | 56.45 | 99.39 | 90.91 | 53.58 |
| 3 | 87.23 | 41.44 | 70.09 | 93.62 | 56.65 | 68.68 |
| 4 | 86.36 | 60.64 | 63.87 | 90.91 | 70.21 | 59.31 |
| Average value | 85.64 | 55.62 | 64.18 | 95.62 | 75.06 | 59 |
| Feature Combination | Validation Set Accuracy | Test Set Accuracy | |||||
|---|---|---|---|---|---|---|---|
| Recall | Precision | F1-Score | Recall | Precision | F1-Score | ||
| RF-D | Original feature | 94.95 | 93.97 | 94.46 | 91.57 | 74.16 | 81.95 |
| All features | 96.84 | 91.83 | 94.27 | 94.76 | 81.88 | 87.85 | |
| After feature select | 96.43 | 92.35 | 94.35 | 93.70 | 86.66 | 90.04 | |
| RF-N | Original feature | 96.39 | 81.82 | 88.51 | 93.23 | 71.73 | 81.08 |
| All features | 96.51 | 82.32 | 88.85 | 92.49 | 75.23 | 82.97 | |
| After feature select | 95.57 | 85.69 | 90.36 | 88.70 | 78.26 | 83.15 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Huang, C.; Gu, J.; Hou, J.; Zhang, Y.; Han, W.; Dou, P.; Feng, Y. Real-Time Wildfire Detection Algorithm Based on VIIRS Fire Product and Himawari-8 Data. Remote Sens. 2023, 15, 1541. https://doi.org/10.3390/rs15061541
Zhang D, Huang C, Gu J, Hou J, Zhang Y, Han W, Dou P, Feng Y. Real-Time Wildfire Detection Algorithm Based on VIIRS Fire Product and Himawari-8 Data. Remote Sensing. 2023; 15(6):1541. https://doi.org/10.3390/rs15061541
Chicago/Turabian StyleZhang, Da, Chunlin Huang, Juan Gu, Jinliang Hou, Ying Zhang, Weixiao Han, Peng Dou, and Yaya Feng. 2023. "Real-Time Wildfire Detection Algorithm Based on VIIRS Fire Product and Himawari-8 Data" Remote Sensing 15, no. 6: 1541. https://doi.org/10.3390/rs15061541
APA StyleZhang, D., Huang, C., Gu, J., Hou, J., Zhang, Y., Han, W., Dou, P., & Feng, Y. (2023). Real-Time Wildfire Detection Algorithm Based on VIIRS Fire Product and Himawari-8 Data. Remote Sensing, 15(6), 1541. https://doi.org/10.3390/rs15061541