1. Introduction
With the improvement of imaging quality, remote sensing images have been applied in many fields. As the basis of many remote sensing image applications, the quality of remote sensing object detection directly affects the effect of downstream applications. Generally speaking, object detection aims at identifying the categories of objects of interest and locating their position and can be divided into horizontal object detection and oriented object detection according to the expression of the bounding box. Since the seminal creative work: R-CNN [
1] and its successive improvements [
2,
3], horizontal object detection has achieved significant progress. As a fundamental yet essential sub-task in object detection, the development of oriented object detection has fallen behind horizontal object detection since it requires a more sophisticated mechanism to locate objects precisely. Recently, remote sensing object detection has drawn increasing attention. However, a significant and recurrent problem is that remote sensing objects are often in multiple scales with arbitrary orientations [
4,
5,
6] and in densely packed distributions with complex background contexts [
7,
8,
9]. Based on the horizontal bounding box, oriented object detection utilizes an angle parameter to position large aspect ratio objects and small remote sensing objects in a crowded environment. Besides, oriented bounding boxes can minimize the error effect caused by the non-maximum suppression compared with horizontal bounding boxes.
The mainstreamed-oriented object detection approaches typically take the perspective that horizontal object detection is a special case for oriented object detection. Accordingly, most oriented object detectors are often inherited from the classical horizontal detectors with an extra orientation parameter
. As shown in
Figure 1, oriented object detectors utilize an extra parameter
to describe the orientation information of the target object, in other words, five parameters
. The oriented bounding box provides a more precise localization of the objects. Especially for the large aspect ratio and small targets, the angle parameter
and center point
play a more significant role in the positioning paradigm. Taking ship detection as an example, detecting a ship in
Figure 1a using a horizontal bounding box has an inferior performance compared with using an oriented bounding box in
Figure 1b as more than half the area of the horizontal bounding box does not belong to the ship.
Most approaches treat oriented object detection as a problem of oriented object localization and the orientation regression-based methods [
4,
10,
11] play the most important role in the research area. Benefiting from [
12,
13,
14], these methods have achieved gratifying performance in research and application. However, the mechanism of angle-based regression methods has congenital drawbacks, including loss discontinuity and regression inconsistency [
15,
16,
17]. These shortcomings are attributed to the periodicity of angular orientation and the specification of the oriented bounding box. For example, a bounding box rotated one degree clockwise or counterclockwise around the ground truth is equivalent under the Intersection over Union (IoU) evaluation metric. The transformation of five parameters
and eight parameters
also contains discontinuity of the loss problem caused by the order of the four points. The set
denotes four corner points of an oriented bounding box, respectively. Besides, some two-stage methods such as [
4,
9,
18] design various complex modules to extract rotated features from the Region of Interest (RoI) and increase the computational complexity of the detectors.
Besides the discontinuity and complexity problems, orientated object detection has the challenge of precisely locating small and cluttered objects. This is especially true for aerial images, which are vital in remote sensing applications. To address this issue, SCRDet [
9] proposed a pixel attention network and a channel attention network to suppress the noise and highlight object features. DRN [
19] proposed a feature selection module and a dynamic refinement head to improve the receptive fields in accordance with the shapes and orientations of small and cluttered objects. However, these mainstream methods ignore spatial interaction among targets. While a vast majority of aerial images are taken from the bird’s-view perspective, most targets are insufficiently covered by their surrounding targets. This fundamental feature of aerial targets is underutilized, and hence, spatial relative information should be considered in detector regression procedures.
Another challenge for oriented object detection is the design of sample assessment. As reported in [
20,
21,
22,
23], the selection, verification, and evaluation of samples can significantly improve the detectors’ performance. ATSS [
20] proved that the selection of positive and negative samples can improve the performance of detectors and proposed an adaptive sample assignment strategy. Chen et al. [
21] discovered that joint inference with sample verification has a promising improvement over its foundation [
24]. Hou et al. [
22] considered shape information and measured the quality of proposals. Li et al. [
23] proposed adaptive points assessment and assignment to improve the classification confidence and localization score. As pointed out in [
25], the center-ness information plays a significant role in object localization. However, existing works do not have an effective measure of it.
As discussed above, the challenges associated with oriented object detection can be summarized as follows:
The discontinuity of loss and the regression inconsistency caused by the expression of the oriented bounding box.
The difficulty of locating small and cluttered objects precisely and the lack of spatial interaction among targets.
Effective selection, verification, and assessment of samples and proposals, especially center-ness quality.
In this paper, we proposed repulsion and center-ness constraints based on RepPoints to improve remote sensing object detection. Firstly, we explore the representation of oriented objects in order to avoid the challenges caused by the oriented bounding box. As determined in RepPoints [
21,
24], point sets have demonstrated great potential while capturing vital semantic features produced by the multiple convolutional layers. In contrast to the conventional convolutional neural networks, RepPoints can have a weighted and wider reception field benefiting from [
26]. To generate bounding boxes, a conversion function is applied to transform points into rectangles. For example, the conversion function MinAreaRect uses the oriented rectangle with minimum area to cover all the points in the learned point set over a target object. Secondly, as RepPoints only regresses the key points in the semantic feature maps but ignores measuring the quality of point sets, it attains an inferior performance for images with densely packed distributions and complex scenes. Therefore, we introduce the addition of a measuring strategy of center-ness to filter noisy samples located away from the center points of bounding boxes based on [
23]. Thirdly, we design a novel loss function named oriented repulsion regression loss to illustrate the spatial interaction among targets. Specifically, we make the predicted bounding boxes closer to their corresponding ground truth boxes and farther from other ground truth boxes and predicted boxes, inspired by [
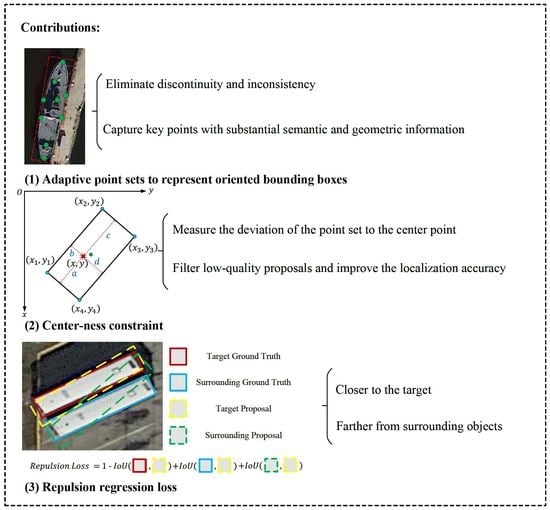
27]. The main contributions of this paper are summarized as follows:
We utilize adaptive point sets to represent oriented bounding boxes to eliminate discontinuity and inconsistency and to capture key points with substantial semantic and geometric information.
We propose a center-ness constraint to measure the deviation of the point set to the center point in the feature map aiming to filter low-quality proposals and improve the localization accuracy.
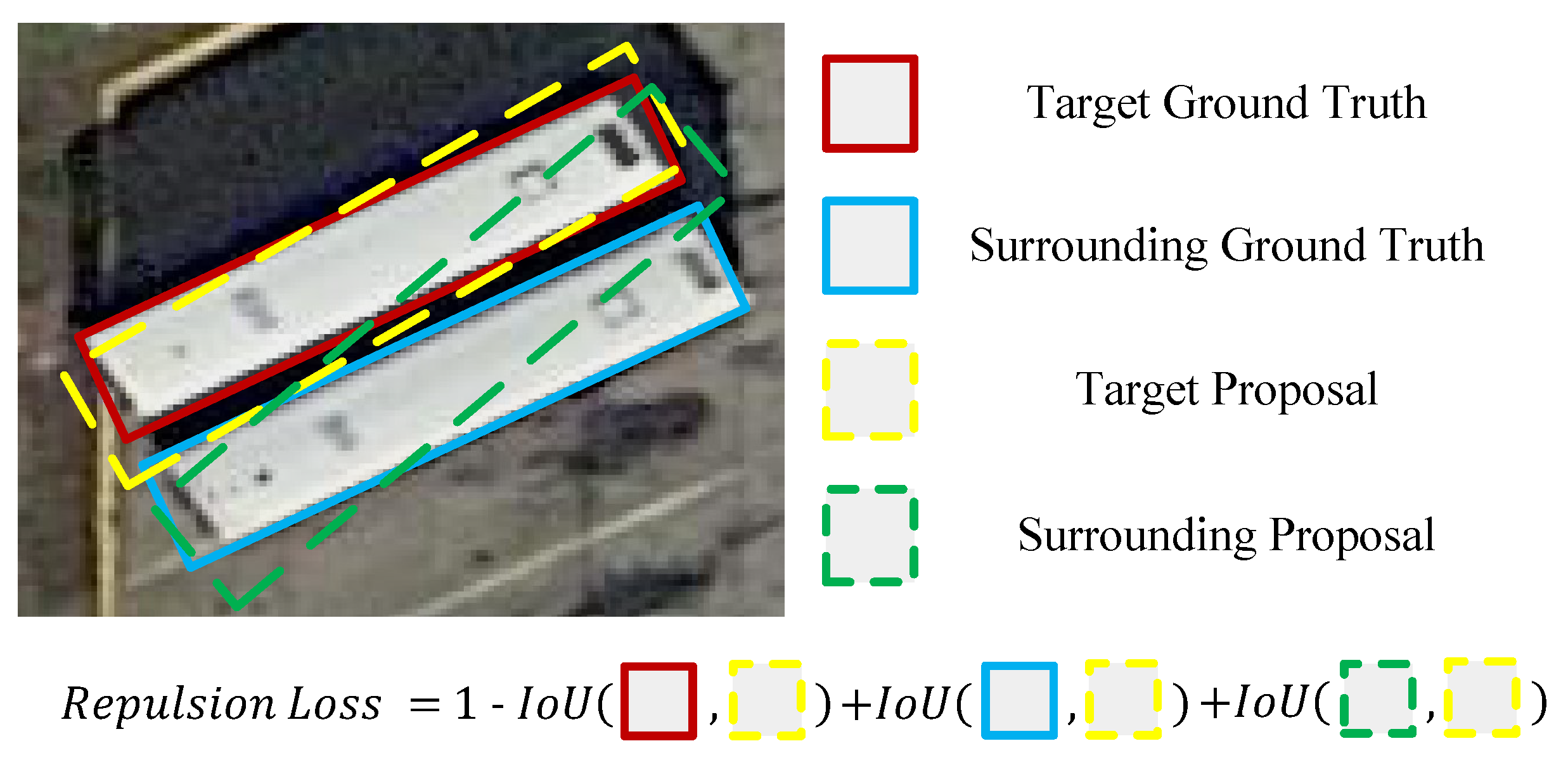
We design a novel repulsion regression loss to effectively illustrate spatial information among remote sensing objects: closer to the target and farther from surrounding objects, especially helpful for small and cluttered objects.
In addition, to evaluate the effectiveness of our proposed method, we conducted a series of experiments on four challenging datasets, DOTA [
28], HRSC2016 [
29], UCAS-AOD [
30], and WHU-RSONE-OBB [
31], and obtained consistent and promising state-of-the-art results.
4. Discussion
In this section, we first demonstrate the superiority of the adaptive point set to represent the oriented bounding box. Secondly, we verify the effectiveness of our proposed center-ness quality assessment and repulsion constraint through a series of ablation studies. Thirdly, we explore the relationship among different categories via the confusion matrix on the DOTA validation set. Then, we further discuss how center-ness and repulsion constraints improve the distribution of localization scores. Finally, we discuss the limitation of the methods and possible future improvements.
4.1. Superiority of Adaptive Point Set
To examine the superiority of the adaptive point set to represent oriented boxes, we compare RepPoints with the anchor-based methods RoI-Trans [
4] and R
Det [
34] on the HRSC2016 dataset. RoI-Trans proposes a transformation module to effectively mitigate the misalignment between RoIs and targets, while R
Det utilizes a feature refinement module to reconstruct features. As shown in
Table 6, the adaptive point set obtained nearly one percent enhancement with no bells and whistles, which displays its inherent superiority for the representation of oriented boxes.
4.2. Effectiveness of Center-Ness and Repulsion Constraints
To investigate the effectiveness of center-ness quality assessment and repulsion constraint, we compared them against the baseline method [
23] without using them.
Table 7 shows the experimental results.
Obviously, both center-ness and repulsion constraints improve the accuracy of the detector, especially the repulsion constraint, which considers the spatial correlation information and obtained a 0.34 mAP improvement compared with the baseline. Meanwhile, APs of three classic small and cluttered objects, plane, small vehicle, and ship, obtained consistent improvements. Although the center-ness constraint only has a slight improvement, with the collaboration of the repulsion constraint, the detector obtained a promising improvement with 0.96 mAP. This is because the center-ness constraint enforces the adaptive points to concentrate more on the center of objects, which is helpful to the localization tasks.
4.3. Correlation between Localization and Classification
To further explore how our proposed center-ness and repulsion constraints improve the quality of the proposals, we statistically analyze the correlation between the localization scores (IoU) and classification confidence of the predicted boxes. The closer the center of the distribution to the upper left corner is, the higher the quality of the predicted boxes the detector generates. In application scenarios, all the predicted boxes are filtered during the post-processing stage where NMS and IoU-thresholds are usually adopted. For a fair comparison, we only selected predicted boxes with no less than the IoU value of 0.5. All the experiments were conducted on the validation set of the DOTA dataset.
The experimental results are visualized in
Figure 8. Obviously, the quality of the predicted boxes generated by the detector is more stable under the application of our two proposed constraints, compared to the baseline with no sample assessment strategy to filter low-quality samples. Furthermore, the center of quality distribution tends to move towards a higher degree under two constraints compared with simply applying one constraint.
4.4. Relationship among Categories
The confusion matrix is a standard format for expressing accuracy evaluation, which can visualize the detection results and discover the relevant information among categories. We provide the confusion matrix on the DOTA validation set to explore the detailed classification accuracy.
As shown in
Figure 9, the detector is inferior at distinguishing between ground track and soccer ball fields, as they usually have similar shapes. Furthermore, in most scenarios, a soccer ball field is located within a ground track field. Moreover, we noticed that the detector mostly misidentifies the background targets as small and clustered targets such as small vehicles, which is mainly influenced by the complex scene environment. Meanwhile, the detector mostly misses objects such as ground track fields because they usually have the same color as the environment, and the iconic features are occluded by surrounding vegetation.
4.5. Failure Analysis
During the validation stage, we noticed some failure cases, as shown in
Figure 10. The yellow ellipses are the targets missed by the detector. Obviously, the detector missed the ship full of containers and classified the containers on board as ships in the left image. While in the right image, the detector missed the black car and truck covered by a gray patch. In the first case, the container on the ship completely covers the texture features of the ship, which is such an abstract situation. Although humans can make correct judgments through prior knowledge, it is difficult to obtain the hidden global semantic information for the detector. In the second case, similar colors with background and image noises (the irregular patch) lead to the omission. As we adopt the adaptive point set for the representation of oriented boxes, backgrounds with similar color and image noises may lead to the absence of some key points of objects. In the future, we may explore the attention mechanism similar to [
59,
60] for feature fusion to address this issue.
4.6. Limitations and Future Directions
As mentioned before, we have verified the effectiveness of our proposed method through a series of carefully designed experiments on four challenging datasets. However, there are still some unsolved issues in our proposed method.
Since the measurement and assessment of samples are only carried out during the training process, it will not affect the speed of inference. Nevertheless, DCN requires more parameters than conventional CNN to obtain an adaptive receptive field, which leads to slower convergence of DCN during training.
In addition, there are usually hundreds or thousands of objects in one image under crowded scenarios, which leads to a sharp rise in computation cost in repulsion loss, especially computing rotated IoU values. In the experiments, we use a small trick to reduce the computation cost, where we use horizontal IoU values to exclude ulterior targets. In the future, we will try to exploit the Gaussian approximation methods proposed by [
40,
41] to simplify the calculation of the rotation IoU.
Finally, we notice that objects of some categories have a dependency relationship with each other, e.g., airplanes parking in airports and soccer ball fields inside ground track fields. We can utilize the prior knowledge of relationships between classes to improve the design of the repulsion loss.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}