1. Introduction
Global navigation satellite systems (GNSS) are widely used in high-precision positioning applications, such as surveying, remote sensing, and unmanned ground vehicles (UGV) [
1]. Differential techniques can effectively eliminate the errors of ionosphere, troposphere, and satellite ephemeris by exploiting the spatial correlation of these GNSS error sources [
2]. However, differential techniques can hardly eliminate multipath errors because multipath signals change with the environment. Therefore, multipath has become the dominant error source in high-precision GNSS positioning.
Multipath is the phenomenon where the direct signal is reflected or diffracted by obstacles. The modulation method, code rate, and carrier frequency of GNSS signals have a direct impact on multipath effects, so the multipath performance is an important factor to be considered in the design of GNSS signals. Modernized GNSS signals generally adopt binary offset carrier (BOC) modulation [
3,
4]. BOC modulation introduces a subcarrier in the binary phase-shift keying (BPSK) modulation, which moves the main energy from the center to the edge of the frequency band [
5,
6]. As a result, the BOC signal has more high-frequency components and larger root-mean-square bandwidth than the BPSK signal with the same code rate, indicating that the BOC signal has better ranging capability and multipath resistance in theory.
How to make full use of the ranging potential of BOC signals is a topic of great interest. Tracking ambiguity is a major threat in processing the BOC signal because its auto-correlation function (ACF) has multiple peaks. The typical delay lock loop (DLL) probably locks on side peaks of the BOC signal, resulting in large ranging errors. Therefore, many three-loop tracking methods have been proposed to solve the tracking ambiguity problem, such as the Dual Estimate Technique (DET) [
7], the Double Phase Estimator (DPE) [
8], and Dual BPSK Tracking (DBT) [
9,
10]. In addition to the DLL and carrier phase lock loop (PLL), three-loop tracking methods use a subcarrier lock loop (SLL) to track the subcarrier delay. In the DPE and DBT methods, the SLL is replaced with a subcarrier phase lock loop (SPLL). With limited signal bandwidth, the SPLL has lower computational complexity and similar thermal noise performance compared to the SLL [
8].
Although three-loop tracking methods address the threat of tracking ambiguity, their ranging performance deteriorates severely in the presence of multipath. Therefore, GNSS receivers need to be equipped with multipath mitigation techniques to reduce ranging errors in practice. There are various GNSS multipath mitigation techniques, among which the receiver signal processing techniques using advanced correlator architectures are of great concern. These correlator-based techniques can be divided into two categories: parametric and non-parametric [
11]. Parametric correlator-based techniques, such as the multipath estimation delay lock loop (MEDLL) [
12], require a large amount of computation and may not converge when there are many multipath signals. By contrast, non-parametric correlator-based techniques require a small amount of computation, so they are more widely used in GNSS receivers. There are many non-parametric correlator-based techniques that can effectively mitigate multipath, such as the narrow correlation (NC) [
13] and double delta (DD) correlator variants (high resolution correlator (HRC) [
14] and strobe correlators [
15]). These multipath mitigation techniques were originally designed for BPSK signals and gradually applied to BOC signals [
16,
17,
18,
19].
Specifically, the NC and DD techniques are usually used in the DLL to mitigate code multipath errors for BOC signals [
20,
21,
22]. Since the code ranging measurement is used to fix the integer ambiguity of subcarrier ranging measurement, the code multipath error needs to be suppressed to be less than half of the subcarrier wavelength. The pseudo-range used for positioning is the subcarrier ranging measurement after fixing integer ambiguity. Multipath signals can introduce errors to the subcarrier ranging measurement, thus resulting in pseudo-range bias and positioning errors. Therefore, subcarrier multipath mitigation techniques are very important for BOC signals to improve positioning accuracy [
21,
22,
23].
Depending on the loop structure, subcarrier multipath mitigation techniques for BOC signals can be divided into two categories: multi-correlator techniques and the offset correlator (OC) technique. Multi-correlator techniques combine multiple correlator outputs to synthesize a narrower correlation function to reduce the multipath sensitive area, such as the DD and strobe correlator techniques applied in the SLL/SPLL [
21,
23]. The OC technique uses forward offset correlators instead of prompt correlators for subcarrier discrimination [
21,
22]. Since multipath signals have longer path delays than the direct signal, forward offset correlators are less susceptible to multipath than prompt correlators, so the OC technique can reduce multipath errors. Furthermore, the multipath mitigation performance of OC technique improves with the increase of forward offset. It has been demonstrated that the OC technique with a large forward offset has better subcarrier multipath mitigation performance than that of multi-correlator techniques [
22]. However, the signal-to-noise ratio (SNR) loss of the OC technique increases with the forward offset, which may cause the tracking loop to lose lock. As a consequence, the OC technique has to compromise between the thermal noise performance and multipath mitigation performance. To ensure the tracking stability, the forward offset of the OC technique cannot be very large, which limits its multipath mitigation performance in practice.
In addition to the code and subcarrier ranging measurements, the BOC signal also provides carrier phase measurements for centimeter-level positioning applications. The carrier multipath error can reach up to several centimeters and is a major error source for high-precision positioning [
24,
25]. However, existing multipath mitigation methods for BOC signals generally focus on the code and subcarrier multipath errors, while neglecting the carrier multipath error. Moreover, in DPE and DBT methods, the SPLL is coupled with the PLL, which implies that the carrier and subcarrier multipath errors interact with each other. When using the DPE or DBT method to track BOC signals, the subcarrier multipath error cannot be completely eliminated without eliminating the carrier multipath error.
This paper proposes a prompt-assisted-offset correlator (PAOC) technique based on the DBT loop to mitigate multipath for BOC signals. The PAOC technique uses the prompt and offset correlators to significantly improve multipath performance with small noise performance loss. Considering the interaction between carrier and subcarrier errors, this paper further proposes using the PAOC technique in both the PLL and the SPLL of the DBT loop. In addition, the code multipath error is mitigated by the NC technique.
The main contributions of this paper are summarized as follows:
A new multipath mitigation technique named PAOC is proposed for BOC signals. The PAOC technique is an improved OC technique with less thermal noise performance loss. Therefore, the PAOC technique can be configured with a larger forward offset to obtain better multipath performance in practice.
It is proposed that carrier and subcarrier multipath errors affect each other when using the SPLL to track the subcarrier. Therefore, this paper proposes to apply the PAOC technique in both the PLL and the SPLL to mitigate carrier and subcarrier multipath errors simultaneously. Compared with existing methods that ignore the carrier multipath, the proposed method better mitigates the subcarrier multipath error and additionally mitigates the carrier multipath error.
The remainder of this paper is organized as follows.
Section 2 introduces the multipath model for BOC signals and analyzes the multipath effects in detail.
Section 3 elaborates on the principle and implementation architecture of the PAOC technique.
Section 4 analyzes the multipath performance and thermal noise performance of the PAOC technique and provides several simulation results. The results and implications are discussed in
Section 5. Finally, conclusions are given in
Section 6.
2. Problem Formulation
This section first describes the BOC signal reception model without multipath and briefly reviews the DBT method. Then, a double-sideband multipath model of the BOC signal is introduced. Finally, the multipath effect on the DBT loop is analyzed.
2.1. Double-Sideband Reception Model for BOC Signals
In the time domain, the BOC signal can be viewed as the product of a BPSK signal and a subcarrier in the form of a square wave, which is written as follows:
where
represents the spreading code,
is the nominal subcarrier frequency,
is the initial subcarrier phase,
is the nominal carrier frequency, and
is the initial carrier phase. A BOC-modulated GNSS signal is usually abbreviated as BOC(m, n), indicating that its subcarrier frequency is
MHz and its code rate is
MHz. The order of the BOC signal is defined as
, which is generally an integer.
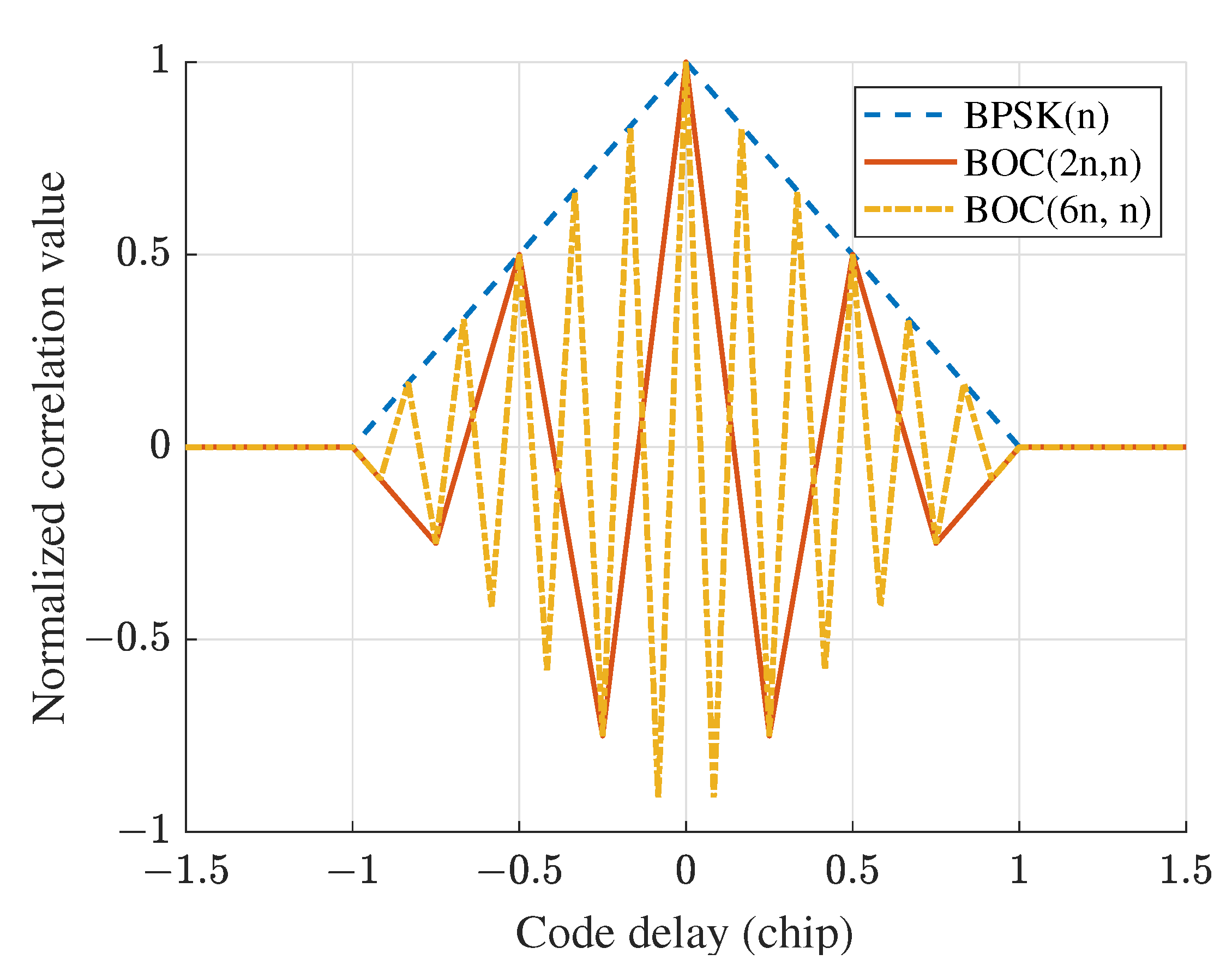
Figure 1 shows the normalized ACF of BPSK(n), BOC(2n, n), and BOC(6n, n) signals. It can be seen from
Figure 1 that the ACF of the BOC signal with a higher order has more peaks.
In practice, the signal transmission bandwidth of GNSS satellites is limited. For BOC signals with a high subcarrier frequency, the actual subcarrier emitted by GNSS satellites is not a square wave but approximates a sine wave. For example, the transmission bandwidth for Galileo E1A signal with the BOC(15, 2.5) modulation is 40.96 MHz [
26], so the subcarrier harmonics are filtered out at the transmitting end. Moreover, the front-end bandwidth of GNSS receivers is also limited and usually smaller than the GNSS signal transmission bandwidth. The subcarrier of the received BOC signal can be reasonably considered as a sine wave. Therefore, the received BOC signal can be written as:
where
A is the amplitude of the received BOC signal,
is the propagation delay,
is the subcarrier frequency with Doppler,
is the subcarrier phase,
is the carrier frequency with Doppler, and
is the carrier phase. For the sake of simplicity, the noise is omitted in Equation (
2), which does not affect the following discussions.
Using the trigonometric transformation, Equation (
2) can be rewritten as follows:
where
is the upper sideband (USB) of the BOC signal, and
is the lower sideband (LSB) of the BOC signal. It can be seen from Equation (
3) that both
and
are BPSK-modulated signals.
Equation (
3) shows a double-sideband reception model for BOC signals, where the received BOC signal is regarded as the sum of two BPSK signals. Based on this double-sideband signal model, the DBT method jointly processes the two BPSK signals in the USB and LSB to track the BOC signal. Since the ACFs of the two BPSK signals have only one peak, the DBT method solves the tracking ambiguity problem. The DBT loop employs two sets of correlators for the USB and LSB of the BOC signal, so it is compatible with classical GNSS receiver architectures designed for BPSK signals.
Using the DBT loop to track BOC signals can yield three ranging measurements: the code delay, subcarrier phase, and carrier phase. The subcarrier ranging measurement is more accurate than the code ranging measurement, but it has integer ambiguity. In the absence of multipath, code ranging errors are usually less than half of the subcarrier wavelength. Therefore, the subcarrier ambiguity can be fixed by the code ranging measurement to obtain the unambiguous and high-precision pseudo-range:
where
is the subcarrier ranging measurement,
is the code ranging measurement, and
is the subcarrier wavelength.
In the presence of multipath, code ranging errors may exceed half of the subcarrier wavelength, resulting in an incorrect subcarrier ambiguity solution. Therefore, it is required to reduce the code multipath error to less than half of the subcarrier wavelength. It has been proved that applying the NC technique in the DBT loop can effectively mitigate code multipath errors to meet this requirement [
22]. When the subcarrier ambiguity is correctly fixed, the pseudo-range shown in Equation (
4) has the same accuracy as the subcarrier ranging measurement.
The accuracy of pseudo-range positioning is usually at the meter level, while centimeter-level positioning applications require high-precision carrier ranging measurements. The carrier phase has integer ambiguity, which needs to be fixed with the pseudo-range. However, the pseudo-range error of the BOC signal, i.e., the subcarrier ranging error, may lead to an incorrect resolution of carrier phase ambiguity. Therefore, it is necessary to design carrier and subcarrier multipath mitigation techniques for BOC signals to improve positioning accuracy.
2.2. Multipath Model for BOC Signals
In practice, the BOC signal is probably reflected or diffracted by obstacles around the GNSS receiver, resulting in multipath signals. Compared with the direct signal, the multipath signal has a longer propagation path. Moreover, the power and carrier Doppler of a multipath signal are usually different from those of the direct signal. The compound signal consisting of the direct signal and multipath signals can be expressed as follows:
where
is the direct signal shown in Equation (
2),
is the m-th multipath signal,
M is the number of multipath signals,
is the multipath relative amplitude,
is the multipath relative delay,
is the multipath relative subcarrier phase,
is the Doppler difference between the direct signal and m-th multipath signal, which is called the fading frequency, and
is the multipath relative phase.
The multipath fading frequency is related to the geometric distribution of the satellite, reflecting platform, and GNSS receiver. Fast-varying multipath signals with large fading frequencies will be suppressed by correlators and loop filters of the GNSS receiver [
27]. When the reciprocal of the fading frequency is less than the integration time, the multipath signal is completely averaged out and has no effect on the tracking loop. By contrast, slow-varying multipath signals with small fading frequencies severely affect the tracking loop and cause large ranging errors. In conclusion, the slow-varying multipath poses a greater threat to GNSS positioning accuracy than the fast-varying multipath. For a stationary GNSS receiver, the multipath fading frequency is very small, typically less than 1 Hz [
28,
29]. Most multipath signals received by GNSS receivers used in surveying, monitoring stations, and other low-dynamic scenarios have small fading frequencies and change slowly [
30,
31]. Therefore, this paper investigates the slow-varying multipath problem for low-dynamic GNSS receivers.
According to the double-sideband reception model for BOC signals, the compound signal shown in Equation (
5) can be transformed as follows:
where
is the USB of the compound signal,
is the LSB of the compound signal,
and
are the carrier frequencies of the direct USB and LSB signals, respectively, and
and
are the carrier phases of the USB and LSB direct signals, respectively.
Equation (
7) shows that the received BOC signal can be regarded as the sum of USB and LSB signals in the presence of multipath. The BOC multipath signal can be decomposed into two BPSK multipath signals located in the USB and LSB, respectively. Therefore, it is feasible to track the compound BOC signal with the DBT loop. However, multipath signals lead to tracking errors. It is necessary to analyze the effect of multipath on the DBT loop.
2.3. Multipath Effect Analysis for BOC Signals
In the DBT loop, the received BOC signal is first mixed with the in-phase carrier and quadrature-phase carrier generated by the carrier numerically controlled oscillator (NCO), respectively. This process is called the carrier wipe-off. Two zero intermediate-frequency (IF) signals are obtained after wiping off the carrier, which are named the in-phase signal and the quadrature-phase signal, respectively. In correlator channels, the in-phase signal is correlated with local codes generated by the code NCO to calculate in-phase correlation values, and the quadrature-phase signal is correlated with local codes to calculate quadrature-phase correlation values.
The complex correlation functions of the USB and LSB signals can be written as:
where
,
, and
are the code delay difference, carrier phase difference, and subcarrier phase difference between the local signal and the direct signal, respectively.
denotes the normalized ACF of the spreading code. When the code delay difference between the local signal and the received signal is greater than one chip, the correlation value is very close to zero. The real part of the complex correlation function is the in-phase correlation function, and the imaginary part of the complex correlation function is the quadrature-phase correlation function.
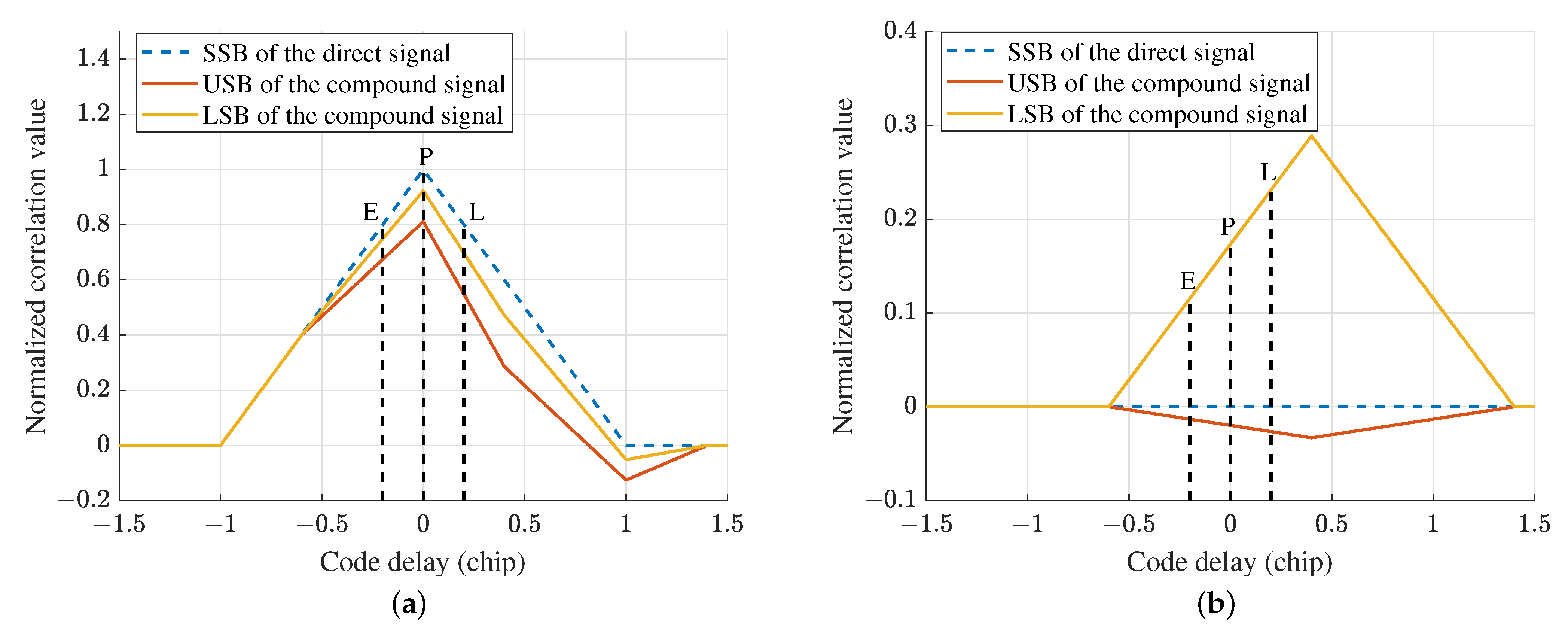
In the absence of multipath, the correlation functions of USB and LSB signals have the same shape. The in-phase correlation function of each single sideband (SSB) signal is an isosceles triangle, as shown by the blue dashed lines in
Figure 2. In the DBT loop, each correlator channel for the USB and LSB signals has three correlators, which are denoted as early (E), prompt (P), and late (L), respectively. The spacing between every two adjacent correlators is identical, and the spacing between E and L correlators is called the early-minus-late (EML) spacing.
The EML code discriminator is designed based on the symmetry of the correlation function. However, the symmetry of the correlation function is broken by the multipath as shown in
Figure 2, where the multipath relative amplitude is 0.5, the multipath relative carrier phase is
, and the multipath relative delay is 0.4 chips. Thus, the multipath leads to bias in the EML discrimination output, and the code multipath error is related to the EML spacing. Using narrow EML spacing can effectively reduce the code multipath error, which is the principle of the NC technique.
The P correlation values are used for subcarrier and carrier discrimination in the DBT loop. In the absence of multipath, the quadrature-phase P correlation values of the USB and LSB signals are 0. However, in the presence of multipath, the quadrature-phase P correlation values of the USB and LSB signals are not 0. As a result, the outputs of the carrier and subcarrier discriminators are affected by the multipath.
As shown in Equations (
8) and (
9), the carrier phase and subcarrier phase are coupled to each other in the USB and LSB correlation values, which implies that the carrier and subcarrier multipath errors interact with each other. Thus, the DBT method subtly combines the USB and LSB correlation values to separate the carrier phase from the subcarrier phase. Specifically, the synthesized correlation function for subcarrier discrimination is calculated as:
Equation (
10) demonstrates that multipath signals lead to a phase rotation of the complex correlation function for subcarrier discrimination. The phase rotation of
is the subcarrier multipath error. When there are many multipath signals, it is difficult to derive an analytical formula for the subcarrier multipath error. Assuming that there is only one multipath signal, the subcarrier multipath error of the DBT method can be calculated as:
The synthesized correlation function for carrier discrimination is calculated as:
Equation (
12) demonstrates that multipath signals lead to a phase rotation of the complex correlation function for carrier discrimination. The phase rotation of
is the carrier multipath error. Assuming that there is only one multipath signal, the carrier multipath error of the DBT method can be calculated as:
It is worth noting that the estimated carrier phase
and subcarrier phase
in Equations (
11) and (
13) contain multipath errors, indicating that the carrier and subcarrier multipath errors affect each other. If multipath mitigation techniques are only used in the SPLL, the subcarrier discrimination output still has deviations due to the indirect effect of carrier multipath errors. Similarly, if multipath mitigation techniques are only used in the PLL, the carrier discrimination output still has deviations due to the indirect effect of subcarrier multipath errors. Therefore, it is required that the multipath mitigation method for BOC signals based on the DBT loop can mitigate both the carrier and subcarrier multipath errors.
3. Materials and Methods
This section proposes a prompt-assisted-offset correlator (PAOC) technique to mitigate carrier and subcarrier multipath errors for BOC signals. Firstly, the principle of the PAOC technique is introduced. Then, the PAOC discriminators and complementary filters are described in detail. Finally, an implementation architecture for applying the PAOC technique in the DBT loop is provided.
3.1. Principle of the PAOC Technique
The multipath signal has a longer propagation delay than the direct signal, implying that the correlation peak of the multipath signal lags behind that of the direct signal. Therefore, the forward offset correlator is less susceptible to the multipath than the prompt correlator.
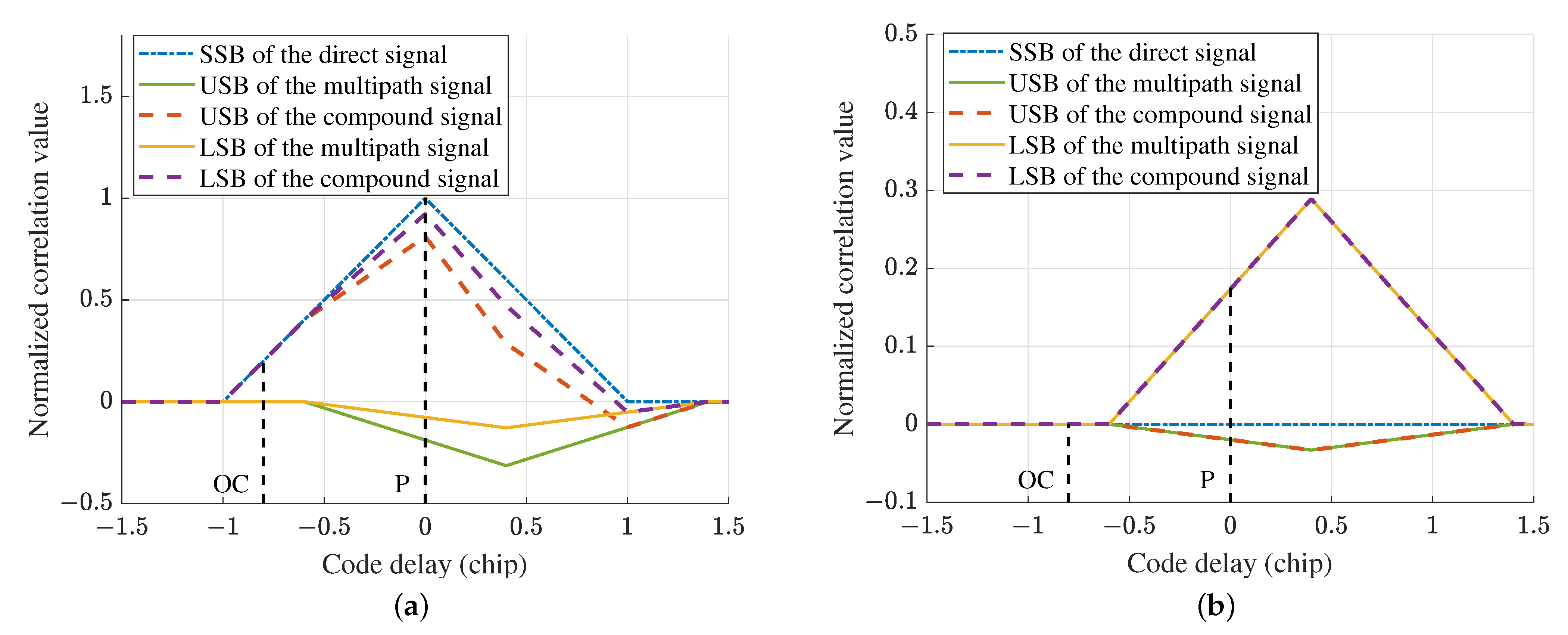
Figure 3 illustrates the effect of a multipath signal with a relative delay of 0.4 chips on different correlators. The quadrature-phase correlation value between the local signal and the direct signal is 0, so the quadrature-phase correlation value of the compound signal is equal to that of the multipath signal. As a result, in
Figure 3b, the red and green lines overlap, and the purple and yellow lines overlap.
Figure 3 clearly shows that the prompt (P) correlator is affected by the multipath signal, while the offset correlator (OC) with a forward offset of 0.8 chips is not affected by the multipath signal.
In fact, the prompt correlator is affected by multipath signals with relative delays less than 1 chip. The offset correlator with a forward offset of chips is only affected by multipath signals with relative delays less than chips. Therefore, using the forward offset correlator instead of the prompt correlator for discrimination can effectively reduce the multipath sensitive area, thus mitigating carrier and subcarrier multipath errors. Furthermore, the multipath performance of the offset correlator improves with the increase of forward offset.
However, as shown in
Figure 3, the magnitude of the offset correlator output is smaller than that of the prompt correlator output. In the presence of noise, the SNR of the offset correlator output is poor. Moreover, the thermal noise performance of the offset correlator degrades with the increase of forward offset. As a consequence, using the offset correlator for discrimination requires a compromise between the thermal noise performance and multipath mitigation performance.
It is observed that the prompt correlator output has a high SNR but is susceptible to the multipath. In contrast, the offset correlator output has a low SNR but is less susceptible to the multipath. The prompt correlator and the offset correlator are complementary in terms of both multipath performance and thermal noise performance. Based on this insight, this paper proposes a PAOC technique using the prompt correlator to assist the offset correlator for carrier and subcarrier discrimination. The PAOC technique combines the advantages of the prompt and offset correlators to substantially improve multipath performance with small noise performance loss.
3.2. PAOC Technique for Subcarrier Multipath Mitigation
There are two specially designed subcarrier discriminators in the PAOC technique. One subcarrier discriminator uses the offset correlator and is called the S-OC discriminator. The other subcarrier discriminator uses the prompt correlator and is called the S-P discriminator. The forward offset of the offset correlator relative to the prompt correlator is assumed to be chips.
The S-OC discriminator is designed as:
where
denotes the in-phase correlator output,
denotes the quadrature-phase correlator output, the subscript
denotes the offset correlator, and the superscripts
u and
l denote the USB and LSB, respectively.
The S-P discriminator is designed as:
where the subscript
p denotes the prompt correlator.
When the multipath relative delay is greater than
chips, the S-OC discriminator output contains no multipath error and can be modeled as:
where
is the subcarrier phase difference between the local signal and the direct signal, and
is the S-OC noise error.
The S-P discriminator output contains multipath errors and can be modeled as:
where
is the subcarrier multipath error, and
is the S-P noise error. Because the prompt correlator output has a higher SNR than the offset correlator, the variance of
is smaller than that of
.
Combining the discriminator outputs shown in Equations (
16) and (
17), a coarse estimate of the subcarrier multipath error can be obtained as:
The subcarrier multipath error estimate
shown in Equation (
18) is noisy. To obtain a fine estimate of the subcarrier multipath error, a first-order low-pass filter is used to reduce the noise error of
. The low-pass filtering process can be expressed as:
where
N is the smoothing constant of the low-pass filter, and
k is the current epoch. The initial value
can be set as 0.
There is an implicit prerequisite for using the low-pass filter to reduce noise errors, which is that the subcarrier multipath error changes slowly. For a low-dynamic GNSS receiver, the fading frequencies of received multipath signals are usually very small. Therefore, the multipath errors of a static or low-dynamic GNSS receiver change slowly, which allows the low-pass filter to be used.
The smoothing constant
N determines the noise error of the filtered estimate
. As the smoothing constant increases, the noise error of
reduces, while the dynamic performance of the GNSS receiver degrades. In practice, the smoothing constant
N can be set flexibly as needed. Considering that the fading frequency of multipath signals received by a static or low-dynamic receiver is generally less than 1 Hz, the smoothing time of the low-pass filter is preferably set to be no longer than 1 s. More discussions about the low-pass filter will be given in
Section 4.
After low-pass filtering, an accurate estimate of the subcarrier multipath error can be obtained as:
where
is the residual noise error with a small variance.
Subtracting the subcarrier multipath error estimate
from the S-P discriminator output
, an unbiased subcarrier estimate with small noise errors can be obtained as:
Equation (
21) shows that the PAOC subcarrier estimate
contains no multipath error. Moreover, the thermal noise error of
is smaller than that of
but lager than that of
.
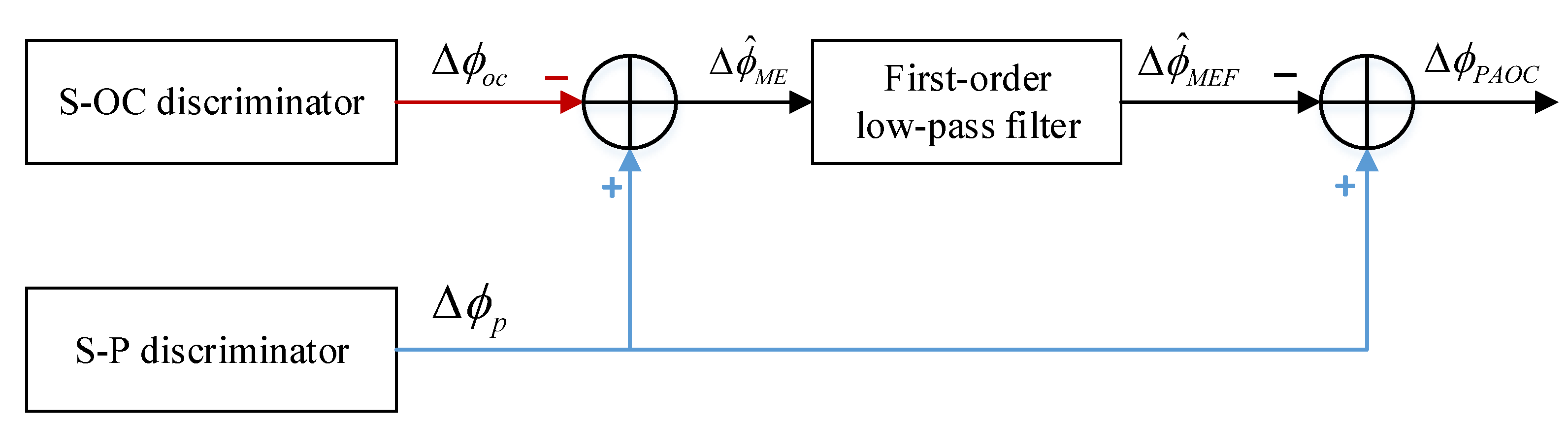
The processing described in Equations (
18)–(
21) can be modeled as a PAOC complementary filter, which is shown in
Figure 4. When the smoothing constant is 1,
is equal to
, and the PAOC subcarrier estimate
is equal to the S-OC discriminator output
. That is to say, the OC technique is a special case of the PAOC technique with a smoothing constant of 1.
3.3. PAOC Technique for Carrier Multipath Mitigation
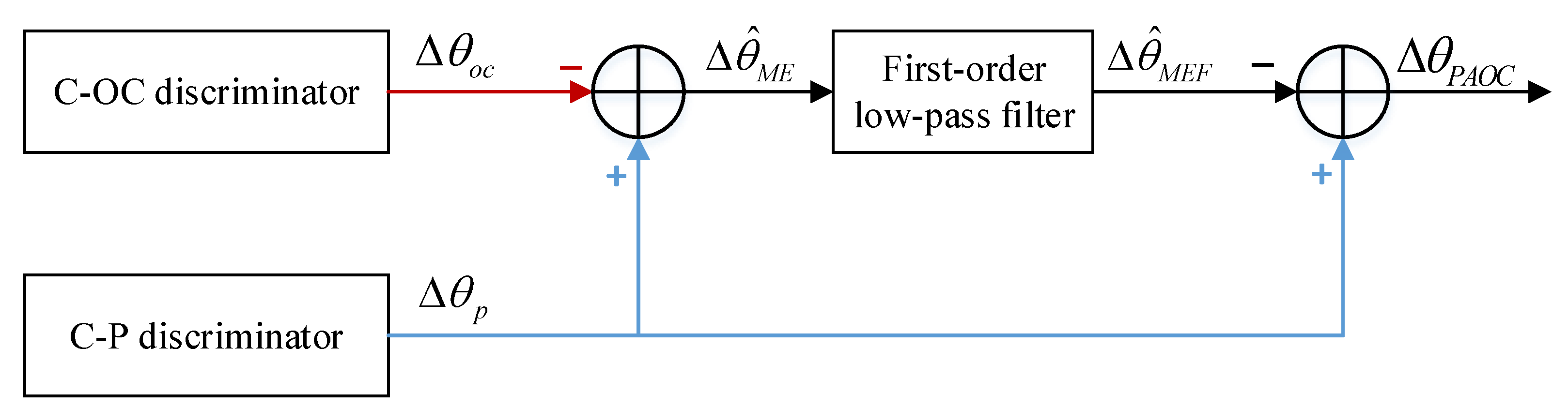
In addition to subcarrier multipath errors, the PAOC technique can also be used to mitigate carrier multipath errors. Similar to the subcarrier discrimination, there are two carrier discriminators in the PAOC technique. One carrier discriminator uses the offset correlator and is called the C-OC discriminator. The other carrier discriminator uses the prompt correlator and is called the C-P discriminator.
The C-OC discriminator is designed as:
The C-P discriminator is designed as:
The outputs of C-OC and C-P discriminators are combined using the PAOC complementary filter shown in
Figure 5 to obtain a high-precision carrier estimate
without multipath errors. The PAOC complementary filter for the carrier has the same architecture as that for the subcarrier. In practice, the PAOC complementary filters for the carrier and subcarrier can be configured with different parameters if necessary.
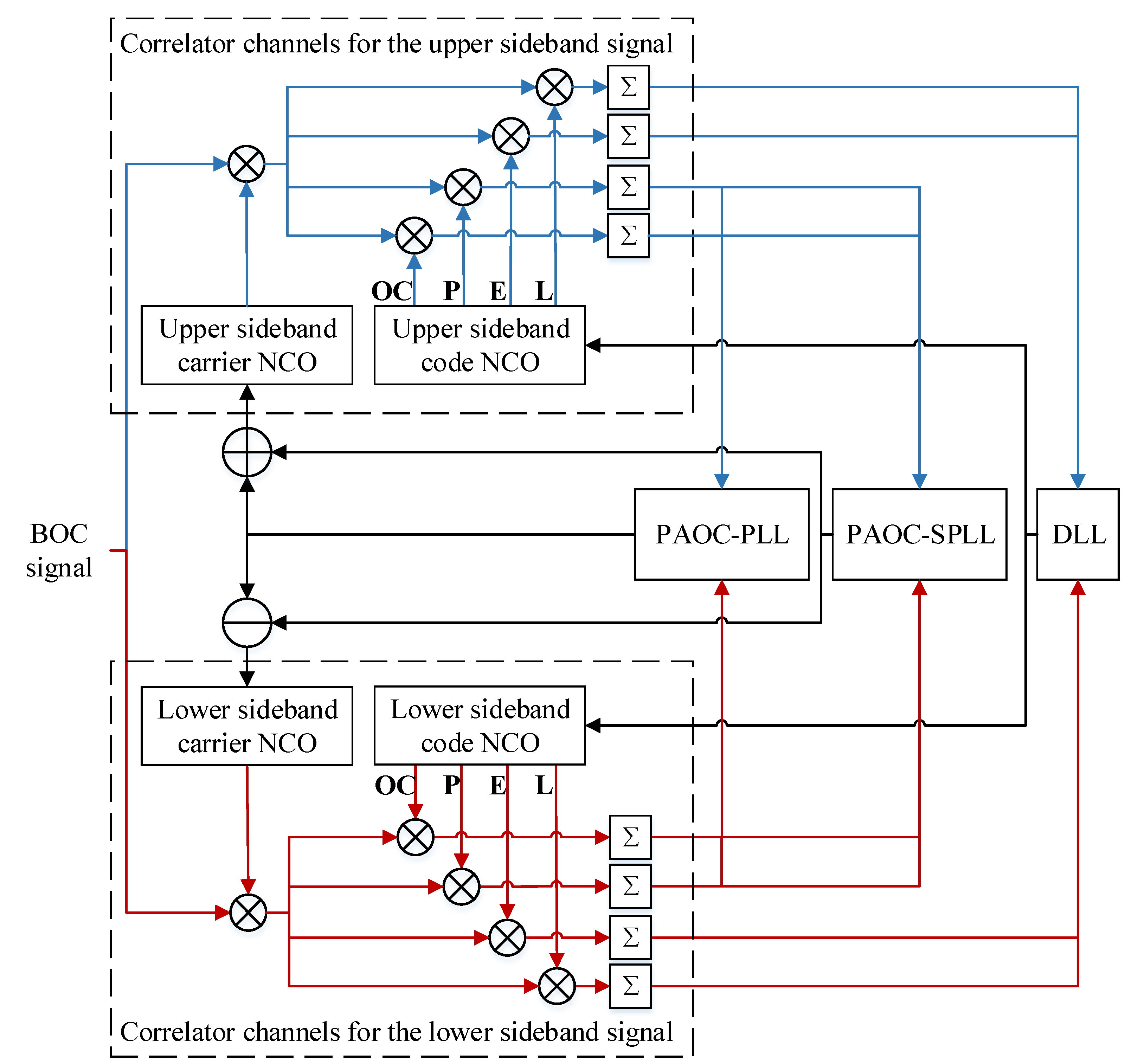
3.4. Implementation of the PAOC Technique
Figure 6 shows the implementation architecture of the PAOC technique in the DBT loop, which consists of four main parts: correlator channels, a PAOC-PLL for the carrier, a PAOC-SPLL for the subcarrier, and a DLL for the code. The S-OC discriminator, S-P discriminator, and PAOC complementary filter are implemented in the PAOC-SPLL. The C-OC discriminator, C-P discriminator, and PAOC complementary filter are implemented in the PAOC-PLL.
The correlator channels are divided into correlator channels for the USB signals and correlator channels for the LSB signals. Every correlator channel has four complex correlators, denoted as the offset correlator (OC), early (E), prompt (P), and late (L), respectively. The received BOC signal is correlated with local replicas in correlator channels to obtain correlation values.
The outputs of the OC and P correlators are fed into the PAOC-PLL to estimate the carrier frequency and carrier phase of the received BOC signal. Moreover, the outputs of the OC and P correlators are also fed into the PAOC-SPLL to estimate the subcarrier frequency and subcarrier phase of the received BOC signal. The outputs of the E and L correlators are fed into the DLL to estimate the code rate and code delay of the received BOC signal. It is worth noting that the spacing between the E and L correlators is usually smaller than 0.1 chips, making the code multipath error less than half of the subcarrier wavelength. According to the parameter estimation results, the frequency words of carrier NCOs and code NCOs are adjusted in real-time to generate local replicas, thus forming a closed tracking loop.
5. Discussion
The PAOC technique could be regarded as an improved OC technique. The original OC technique only uses the forward offset correlator for discrimination. As the forward offset increases, the multipath mitigation performance of the OC technique improves, while its thermal noise performance deteriorates. To resolve this contradiction, the PAOC technique uses the prompt correlator to assist the offset correlator for discrimination. Specifically, a PAOC complementary filter is designed to combine the discrimination results of the prompt and offset correlators. Compared with the original OC technique, the PAOC technique has less thermal noise loss and reduces the risk of losing lock in the tracking loop. This suggests that the PAOC technique can use a larger forward offset to obtain better multipath performance in practice.
The PAOC technique is more suitable for low-dynamic and stationary GNSS receivers. Experimental results in this paper show that the PAOC technique with a smoothing time of 0.2 s can effectively reduce thermal noise errors. Using a longer smoothing time can further reduce thermal noise errors, but the smoothing time is preferably no more than 1 s to maintain the dynamic performance. In practice, both the forward offset and smoothing time of the PAOC technique can be flexibly configured.
The PAOC technique is easy to implement in existing GNSS receivers and has low computational complexity. Compared with the OC technique, the PAOC technique adds a complementary filter. The calculation rate of the complementary filter is typically between 50 and 1000 Hz, while the calculation rate of correlators is equal to the signal sampling rate, which is usually greater than 10 MHz for BOC signals. Therefore, the calculation amount of correlators is much larger than that of the complementary filter. Compared with the DBT method, the PAOC technique additionally uses two offset correlators. Considering that the DBT method employs eight correlators, using the PAOC technique in the DBT loop increases the computational burden by about 25%.
As an internal-receiver multipath mitigation technique, the PAOC technique proposed in this paper does not use additional sensors. If auxiliary sensors, such as the inertial navigation systems, are available, the receiver status can be better detected so that appropriate parameters can be selected for the PAOC technique to optimize the multipath and noise performance. Moreover, the PAOC technique can be used together with pre-receiver and post-processing techniques to further improve the multipath performance of GNSS receivers.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}