

Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies

 ,
,  ,
,  , ,
, ,
Abstract
1. General Introduction and Background
- Section 3 presents the main methodologies and data used for our investigations;
SST Gradients’ Retrieval: Context and Motivation of the Proposed Approach
2. Insights on Co-Registration Related Effects
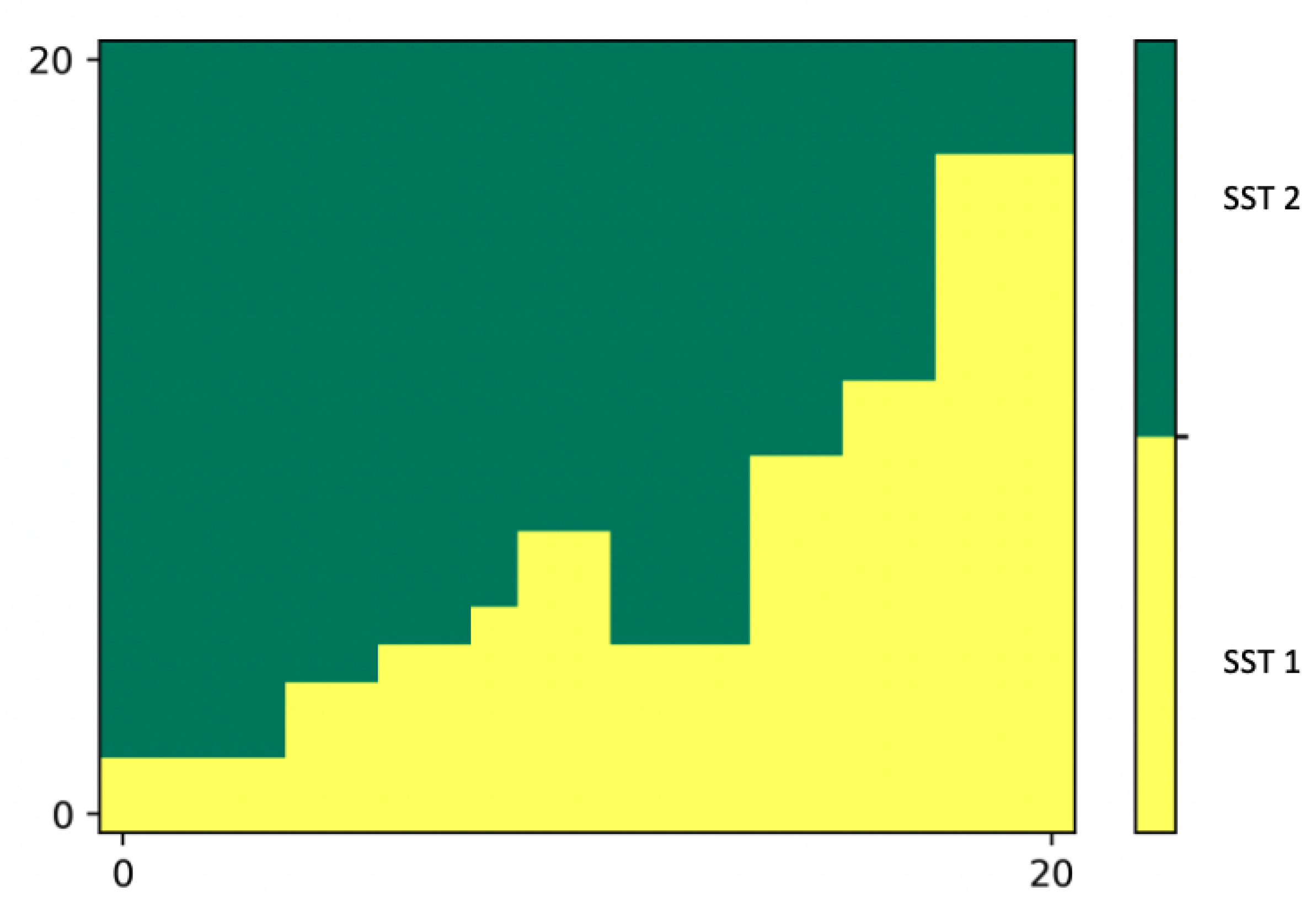
- An ideal case, in the absence of inter-channel co-registration issues, leading to the estimation of SST;
- A realistic case, introducing the co-registration error, yielding the SST field.
3. Methods and Data
- 1.
- Demonstrate that horizontal gradients of atmospheric radiatively active variables (vertical distribution of water vapor, ozone and temperature) are mostly characterized by scales of variability larger than the ones of interest for the sea surface, so that gradients in the TOA BTs can be considered to be locally determined, at a first-order approximation, by the SST ones;
- 2.
- Quantify the attenuation of atmospheric gases (e.g., water vapor) on the magnitude of the SST gradients from TOA BT observations;
- 3.
- Test different approaches for computing SST gradients from gridded 2D fields in order to minimize the effect of radiometric noise, whose expected extent for the Harmony mission has been presented in Table 1.
- The Sentinel-3 non-time-critical (NTC) observations distributed as L2P SST products by EUMETSAT. These products follow the Group for High Resolution Sea Surface Temperature data format specification (GHRSST, https://www.ghrsst.org/, accessed on 28 November 2022), which means they include both single-channel top-of-the-atmosphere brightness temperatures (L1) and skin SST (L2) data in the same file, together with specific L2P and user-defined SST quality flags. The quality flag is an indicator of the SST accuracy and ranges from 0 to 5: (i) 0 = missing data; (ii) 1 = cloud; (iii) 2 = worst quality, (iv) 3 = low quality; (v) 4 = acceptable quality; (vi) 5 = best quality. The L2P SST and related flags are actually those computed from dual-view data, but nadir-view SST can be recovered adding the “dual minus nadir SST difference” provided as an experimental variable in the L2P file. Here, we focused only on nadir-view data to maximize the spatial correspondence between L1 and L2 data. We selected only the highest quality flag (keeping only best quality “flag 5” data), to remove cloud-contaminated pixels, which might alter SST gradient estimates. This results in some additional artefact clouds being removed from BT/SST data. In our case study, the percentage of best quality data was estimated to be around 97%, thus guaranteeing a large availability of observations for our analyses. The L2P GHRSST data are provided in sensor coordinates. The spatial resolution of these data is around 1 km.
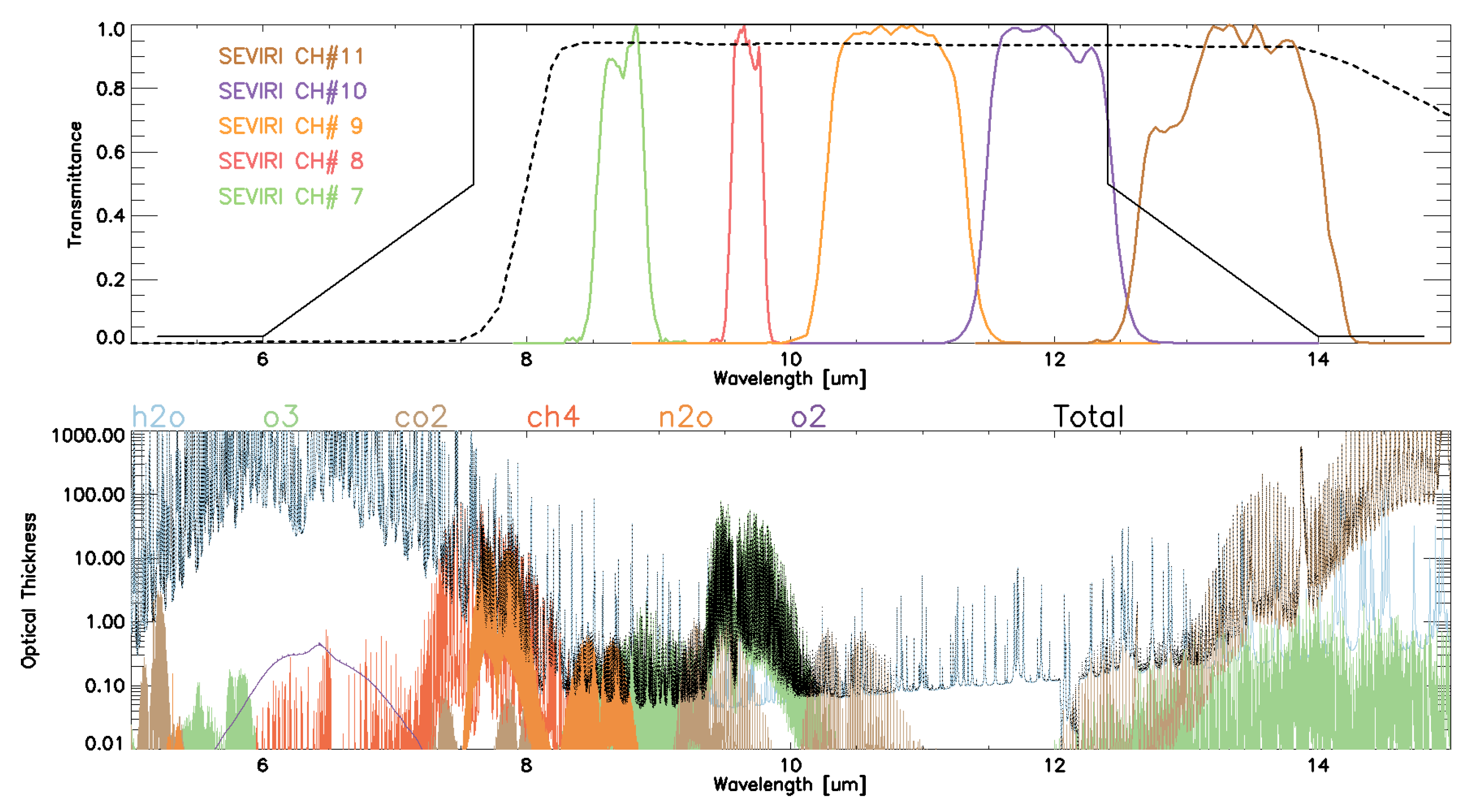
- The level 1.5 Meteosat Second Generation (MSG)-3 SEVIRI data. The data are provided as high-rate transmissions in 12 spectral channels spanning the 0.6 to 13.4 m range. The images consist of geolocated, radiometrically pre-processed data, including radiometric and geometric quality control information. The data contain TOA radiances and are expressed in . The spatial resolution of these data is around 3 km at the subsatellite point [35]. For our purposes, we extracted information from the following IR channels: 8.7, 9.7, 10.8 and 12.0 m.
4. Results
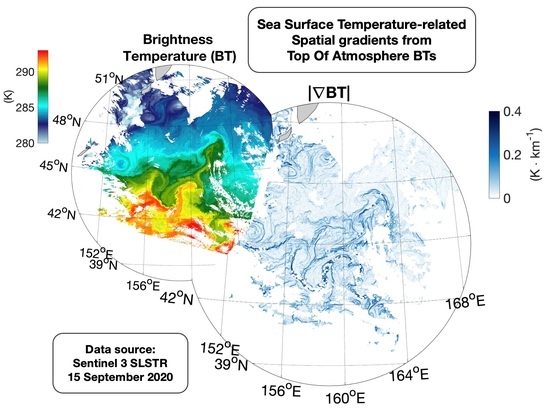
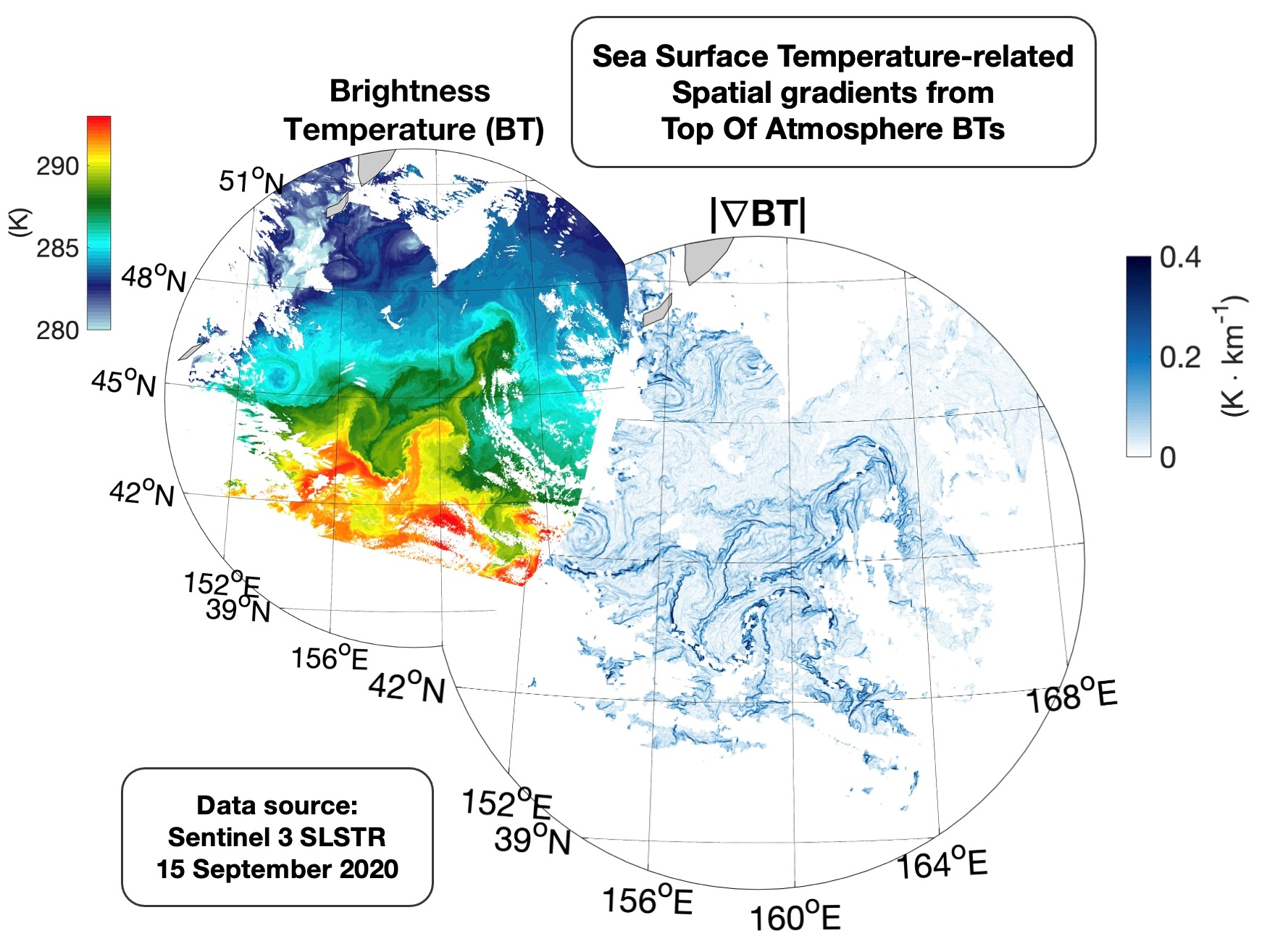
4.1. SST Gradients from L1 Observations: A Test Case
4.2. Test Case Based on SEVIRI Data
- ;
- .
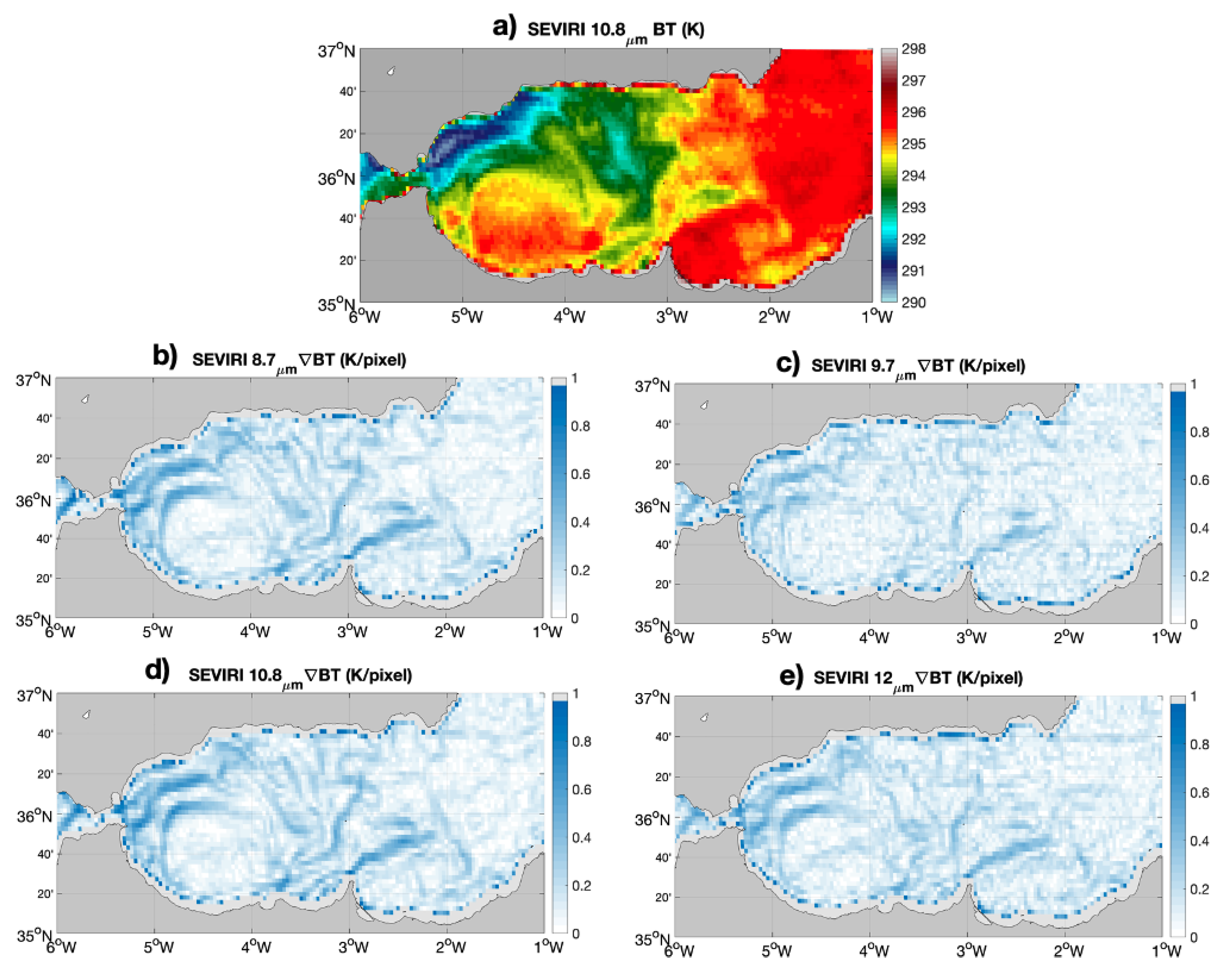
- The BT gradients shown in Figure 6b–e (given in K) differ in the description of the SST-related gradients in the selected area. Channel #9, compared to #7 and 10, exhibits the sharpest gradients. This channel is indeed characterized by the lowest NWF from 700 hPa to TOA levels and is thus chosen as a reference for the description of the sea surface [32];
- As expected, channel #8 (9.7 m) yields a highly smoothed description of the sea surface thermal conditions. The signal contains small-scale noise although still capturing some of the sharpest gradients seen by channel #9.
4.3. SST Gradients from BT Observations: Testing Water Vapor Effects
4.4. Optimizing the Gradient Numerical Scheme
- In ideal conditions (i.e., no noise), the finite central differences numerical scheme yields the best gradient estimates. The bias and root mean square error (RMSE) with respect to the analytical case (aGI) are, respectively, −0.0011 and 0.085 K. The wider stencil numerical schemes show comparable averaged performances but exhibit a slight degradation with respect to the central approach. Indeed, going from the Sobel to Pavel11 scheme, the bias and RMSE progressively increase, respectively, reaching −0.0065 and 0.087 K in the Pavel11 case. This behavior is mostly due to an enhanced smoothing of the gradient field for wider stencil width estimators. The Roberts estimator constitutes an exception, as it tends to misplace the gradient structure yielding inaccurate intensities (Figure 11).
- In the presence of noise, the results of the ideal scenario are reversed. The inaccuracies on the SST introduced via the Gaussian noise are highly detrimental for the gradient field. The bias and RMSE, respectively, reach 0.15 and 0.21 K for the central estimator and decrease monotonically down to 0.10 and 0.028 K for the Pavel11 case. The visual inspection of Figure 12 also enables the assessment that the Pavel11, although slightly smoothing the highest values, enables the correct representation of the gradient feature and a more refined description of the marginal area (the transition from the uniform background SST to the SST values related to our synthetic warm-core eddy). As for the previous case, the Roberts estimator constitutes an exception, exhibiting the largest bias (0.23 K), and highly degrades the gradient field as depicted by the 2D maps in Figure 12.
5. Conclusions
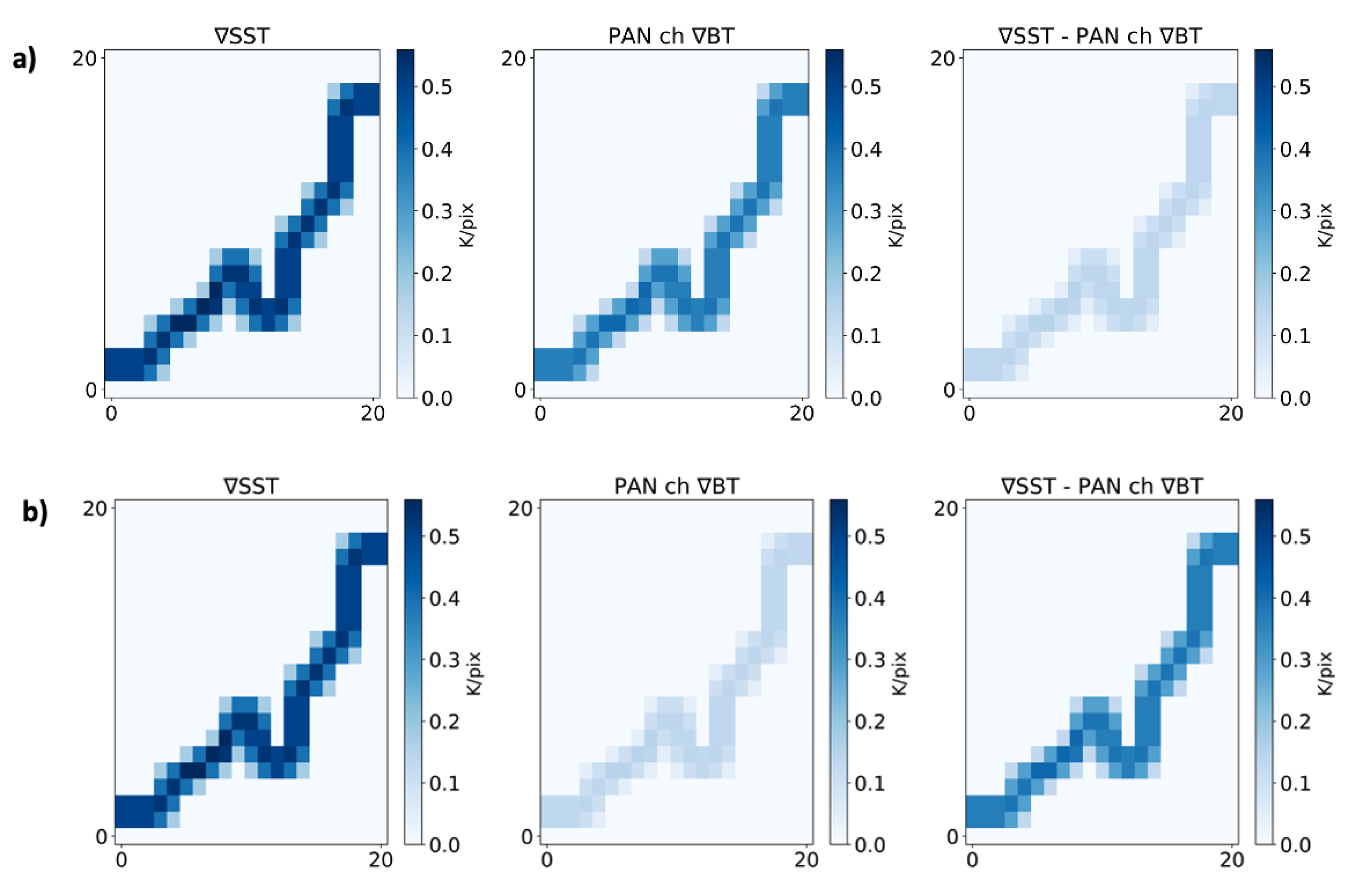
- Quantify the atmospheric effects in the space-based (TOA) PAN BT-derived SST gradients. Two extreme cases were treated, i.e., the retrieval in the presence of tropical and subarctic conditions. Very large concentrations of water vapor (typical of tropical conditions) can degrade the signal in TOA observation and allow the recovery of 30% of the gradient features found at the sea surface. However, the amount of the recovered signal can rise up to 80% if one progressively switches from tropical to typical subarctic conditions. For the specific purposes of the Harmony mission, this would favor the applicability of the proposed approach to mid-high latitude areas;
- Quantify the effect of inter-channel co-registration on the SST-based gradient retrieval, i.e., considering a co-registration issue between the TIR-1 and TIR-2 narrow-band channels by about 10% of the pixel length. This turned out to be critical for the accuracy of the gradient features extracted from SST geophysical retrievals. Not only are co-registration issues responsible for generating spurious features but they can also generate degradations of the overall gradient estimates by about 10%. This emphasizes the advantages of retrieving SST gradients from PAN-derived BTs, which enables us to get rid of any inter-channel co-registration issues;
- Assess which is the optimal numerical scheme to compute gradients from 2D BT (or SST scenes) in the presence of radiometric noise. In general, wide-stencil (i.e., at least 5 × 5) noise-robust differentiators, such as the Pavel kernels, are recommended. They indeed enable the preservation of the main gradient features even when the original 2D field is corrupted due to random noise. The chosen numerical scheme should, however, account for the number of available observations, which may vary according to the atmospheric conditions (cloud cover) or according to the distance between the study area and the coastline.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Atmospheric Radiative Transfer Simulator (ARTS)
- The Harmony TIR payload spectral characteristics and viewing geometry were extracted from [23]. The TIR payload will enable observations with five different off-nadir viewing angles (51, 45, 39, 33, 27)° and, in this study, only results based on the 27° angle are presented;
- The simulations were performed with a spectral resolution of 0.5 GHz;
- A collection of atmospheric profiles was extracted from the Garand dataset [34]. The dataset considers 42 atmospheric profiles representative of different pressure, temperature and gas concentration (HO, O, CO, CH, NO and CO) conditions. For this study, we used the tropical summer and subarctic winter profiles (see also Section 4);
- Regarding the seawater emissivity, in the presented numerical simulations, referring to a single geometry, priority was given to the detailed description of spectral characteristics (http://www.icess.ucsb.edu/modis/EMIS/html/em.html, accessed on 23 July 2022) neglecting the dependence from surface roughness and seawater temperature;
- The bottom boundary condition (BBC) (i.e., sea surface temperature) is approximated as the same temperature of the lowest atmospheric level. Additional synthetic BBCs were also obtained by varying the SST in the range [SST-5 K, SST+5 K] and keeping only results for which 271 K ≤ SST ≤ 308 K.
Appendix B. Numerical Estimates of Gradient Fields
Appendix B.1. Sobel
Appendix B.2. Roberts
Appendix B.3. Prewitt
Appendix B.4. Central Differences Methods
References
- Chang, Y.; Cornillon, P. A comparison of satellite-derived sea surface temperature fronts using two edge detection algorithms. Deep Sea Res. Part II Top. Stud. Oceanogr. 2015, 119, 40–47. [Google Scholar] [CrossRef]
- Belkin, I.M.; Cornillon, P.C. Fronts in the world ocean’s large marine ecosystems. Ices Cm 2007, 500, 21. [Google Scholar]
- Vazquez-Cuervo, J.; Torres, H.S.; Menemenlis, D.; Chin, T.; Armstrong, E.M. Relationship between SST gradients and upwelling off Peru and Chile: Model/satellite data analysis. Int. J. Remote Sens. 2017, 38, 6599–6622. [Google Scholar] [CrossRef]
- Castro, S.L.; Emery, W.J.; Wick, G.A.; Tandy, W., Jr. Submesoscale sea surface temperature variability from UAV and satellite measurements. Remote Sens. 2017, 9, 1089. [Google Scholar] [CrossRef]
- Messager, C.; Swart, S. Significant atmospheric boundary layer change observed above an Agulhas Current warm cored eddy. Adv. Meteorol. 2016, 2016. [Google Scholar] [CrossRef]
- Warner, T.T.; Lakhtakia, M.N.; Doyle, J.D.; Pearson, R.A. Marine atmospheric boundary layer circulations forced by Gulf Stream sea surface temperature gradients. Mon. Weather. Rev. 1990, 118, 309–323. [Google Scholar] [CrossRef]
- Barsugli, J.J.; Battisti, D.S. The basic effects of atmosphere–ocean thermal coupling on midlatitude variability. J. Atmos. Sci. 1998, 55, 477–493. [Google Scholar] [CrossRef]
- Nilsson, J. Propagation, diffusion, and decay of SST anomalies beneath an advective atmosphere. J. Phys. Oceanogr. 2000, 30, 1505–1513. [Google Scholar] [CrossRef]
- Woollings, T.; Hoskins, B.; Blackburn, M.; Hassell, D.; Hodges, K. Storm track sensitivity to sea surface temperature resolution in a regional atmosphere model. Clim. Dyn. 2010, 35, 341–353. [Google Scholar] [CrossRef]
- Zheng, Y.; Bourassa, M.A.; Hughes, P. Influences of sea surface temperature gradients and surface roughness changes on the motion of surface oil: A simple idealized study. J. Appl. Meteorol. Climatol. 2013, 52, 1561–1575. [Google Scholar] [CrossRef]
- Rascle, N.; Molemaker, J.; Marié, L.; Nouguier, F.; Chapron, B.; Lund, B.; Mouche, A. Intense deformation field at oceanic front inferred from directional sea surface roughness observations. Geophys. Res. Lett. 2017, 44, 5599–5608. [Google Scholar] [CrossRef]
- Frenger, I.; Gruber, N.; Knutti, R.; Münnich, M. Imprint of Southern Ocean eddies on winds, clouds and rainfall. Nat. Geosci. 2013, 6, 608–612. [Google Scholar] [CrossRef]
- Holligan, P. Biological implications of fronts on the northwest European continental shelf. Philos. Trans. R. Soc. Lond. Ser. Math. Phys. Sci. 1981, 302, 547–562. [Google Scholar]
- Vazquez-Cuervo, J.; Gomez-Valdes, J.; Bouali, M.; Miranda, L.E.; Van der Stocken, T.; Tang, W.; Gentemann, C. Using saildrones to validate satellite-derived sea surface salinity and sea surface temperature along the California/Baja Coast. Remote Sens. 2019, 11, 1964. [Google Scholar] [CrossRef]
- Wick, G.A.; Jackson, D.L.; Castro, S.L. Assessing the ability of satellite sea surface temperature analyses to resolve spatial variability—The northwest tropical Atlantic ATOMIC region. Remote Sens. Environ. 2023, 284, 113377. [Google Scholar] [CrossRef]
- Rio, M.H.; Santoleri, R. Improved global surface currents from the merging of altimetry and sea surface temperature data. Remote Sens. Environ. 2018, 216, 770–785. [Google Scholar] [CrossRef]
- Ciani, D.; Rio, M.H.; Nardelli, B.B.; Etienne, H.; Santoleri, R. Improving the altimeter-derived surface currents using sea surface temperature (SST) data: A sensitivity study to SST products. Remote Sens. 2020, 12, 1601. [Google Scholar] [CrossRef]
- Isern-Fontanet, J.; García-Ladona, E.; González-Haro, C.; Turiel, A.; Rosell-Fieschi, M.; Company, J.B.; Padial, A. High-Resolution Ocean Currents from Sea Surface Temperature Observations: The Catalan Sea (Western Mediterranean). Remote Sens. 2021, 13, 3635. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Cavaliere, D.; Charles, E.; Ciani, D. Super-Resolving Ocean Dynamics from Space with Computer Vision Algorithms. Remote Sens. 2022, 14, 1159. [Google Scholar] [CrossRef]
- Umbert, M.; Hoareau, N.; Turiel, A.; Ballabrera-Poy, J. New blending algorithm to synergize ocean variables: The case of SMOS sea surface salinity maps. Remote Sens. Environ. 2014, 146, 172–187. [Google Scholar] [CrossRef]
- Droghei, R.; Buongiorno Nardelli, B.; Santoleri, R. A new global sea surface salinity and density dataset from multivariate observations (1993–2016). Front. Mar. Sci. 2018, 5, 84. [Google Scholar] [CrossRef]
- Pearson, K.; Good, S.; Merchant, C.J.; Prigent, C.; Embury, O.; Donlon, C. Sea surface temperature in global analyses: Gains from the Copernicus Imaging Microwave Radiometer. Remote Sens. 2019, 11, 2362. [Google Scholar] [CrossRef]
- ESA. Report for Assessment: Earth Explorer 10 Candidate Mission Harmony. 2020. Available online: https://atpi.eventsair.com/ucm-2022/ucm-doc (accessed on 13 August 2022).
- López-Dekker, P.; Biggs, J.; Chapron, B.; Hooper, A.; Kääb, A.; Masina, S.; Mouginot, J.; Buongiorno Nardelli, B.; Pasquero, C.; Prats-Iraola, P.; et al. The Harmony mission: End of phase-0 science overview. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7752–7755. [Google Scholar]
- ESA. Report for Mission Selection: Earth Explorer 10 Candidate Mission Harmony. 2022. Available online: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Preparing_for_tomorrow/Scientific_and_technical_mission_documents (accessed on 26 June 2022).
- Coppo, P.; Brandani, F.; Faraci, M.; Sarti, F.; Dami, M.; Chiarantini, L.; Ponticelli, B.; Giunti, L.; Fossati, E.; Cosi, M. Leonardo spaceborne infrared payloads for Earth observation: SLSTRs for Copernicus Sentinel 3 and PRISMA hyperspectral camera for PRISMA satellite. Appl. Opt. 2020, 59, 6888–6901. [Google Scholar] [CrossRef] [PubMed]
- Inoue, T. On the temperature and effective emissivity determination of semi-transparent cirrus clouds by bi-spectral measurements in the 10μm window region. J. Meteorol. Soc. Jpn. Ser. II 1985, 63, 88–99. [Google Scholar] [CrossRef]
- Sassen, K.; Grund, C.J.; Spinhirne, J.D.; Hardesty, M.M.; Alvarez, J.M. The 27–28 October 1986 FIRE IFO cirrus case study: A five lidar overview of cloud structure and evolution. Mon. Weather. Rev. 1990, 118, 2288–2312. [Google Scholar] [CrossRef]
- Montanaro, M.; Levy, R.; Markham, B. On-orbit radiometric performance of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 11753–11769. [Google Scholar] [CrossRef]
- Scalione, T.; De Luccia, F.; Cymerman, J.; Johnson, E.; McCarthy, J.K.; Olejniczak, D. VIIRS initial performance verification. Subassembly, early integration and ambient phase I testing of EDU. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Republic of Korea, 25–29 July 2005; Volume 1, p. 4. [Google Scholar]
- Francois, C.; Brisson, A.; Le Borgne, P.; Marsouin, A. Definition of a radiosounding database for sea surface brightness temperature simulations: Application to sea surface temperature retrieval algorithm determination. Remote Sens. Environ. 2002, 81, 309–326. [Google Scholar] [CrossRef]
- Schmetz, J.; Pili, P.; Tjemkes, S.; Just, D.; Kerkmann, J.; Rota, S.; Ratier, A. An introduction to Meteosat second generation (MSG). Bull. Am. Meteorol. Soc. 2002, 83, 977–992. [Google Scholar] [CrossRef]
- Eriksson, P.; Buehler, S.; Davis, C.; Emde, C.; Lemke, O. ARTS, the atmospheric radiative transfer simulator, version 2. J. Quant. Spectrosc. Radiat. Transf. 2011, 112, 1551–1558. [Google Scholar] [CrossRef]
- Garand, L.; Turner, D.; Larocque, M.; Bates, J.; Boukabara, S.; Brunel, P.; Chevallier, F.; Deblonde, G.; Engelen, R.; Hollingshead, M.; et al. Radiance and Jacobian intercomparison of radiative transfer models applied to HIRS and AMSU channels. J. Geophys. Res. Atmos. 2001, 106, 24017–24031. [Google Scholar] [CrossRef]
- Schmid, J. The SEVIRI instrument. In Proceedings of the 2000 EUMETSAT Meteorological Satellite Data User’s Conference, Bologna, Italy, 29 May–2 June 2000; Volume 29, pp. 13–32. [Google Scholar]
- Jin-Yu, Z.; Yan, C.; Xian-Xiang, H. Edge detection of images based on improved Sobel operator and genetic algorithms. In Proceedings of the 2009 International Conference on Image Analysis and Signal Processing, Linhai, China, 11–12 April 2009. [Google Scholar]
- Anderson, G.P.; Clough, S.A.; Kneizys, F.; Chetwynd, J.H.; Shettle, E.P. AFGL Atmospheric Constituent Profiles (0.120 km); Technical Report; Air Force Geophysics Lab Hanscom AFB MA; Defense Technical Information Center: Fort Belvoir, VA, USA, 1986. [Google Scholar]
- Rafati, M.; Arabfard, M.; Rafati-Rahimzadeh, M. Comparison of different edge detections and noise reduction on ultrasound images of carotid and brachial arteries using a speckle reducing anisotropic diffusion filter. Iran. Red Crescent Med. J. 2014, 16, e14658. [Google Scholar] [CrossRef] [PubMed]
- Carton, X. Hydrodynamical modeling of oceanic vortices. Surv. Geophys. 2001, 22, 179–263. [Google Scholar] [CrossRef]
- Chapron, B.; Collard, F.; Ardhuin, F. Direct measurements of ocean surface velocity from space: Interpretation and validation. J. Geophys. Res. Ocean. 2005, 110. [Google Scholar] [CrossRef]
- Eresmaa, R.; McNally, A.P. Diverse profile datasets from the ECMWF 137-level short-range forecasts. NWPSAF-EC-TR-017 2014, 10, 4476–8963. [Google Scholar]
- Li, X.; Xiao, J.; Zhou, Y.; Ye, Y.; Lv, N.; Wang, X.; Wang, S.; Gao, S. Detail retaining convolutional neural network for image denoising. J. Vis. Commun. Image Represent. 2020, 71, 102774. [Google Scholar] [CrossRef]
- Tian, C.; Xu, Y.; Li, Z.; Zuo, W.; Fei, L.; Liu, H. Attention-guided CNN for image denoising. Neural Netw. 2020, 124, 117–129. [Google Scholar] [CrossRef]
- Davies, E.R. Machine Vision: Theory, Algorithms, Practicalities; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HARMONY | Central WL | Width | SSD | NET @ 280 K | Rad. Accuracy @ 280 K |
|---|---|---|---|---|---|
| Channel | (m) | (m) | (km) | (K) | (K) |
| TIR-1 | 10.85 | 0.9 | 1 | 0.1(G)–0.15(T) | 0.5 |
| TIR-2 | 11.95 | 1.1 | 1 | 0.1(G)–0.15(T) | 0.5 |
| CD-1 | 8.6 | 1.2 | 1 | 0.1(G)–0.15(T) | 0.5 |
| PAN | 10.0 | 4.0 | 0.33 | 0.1(G)–0.15(T) | 0.5 |
| S3-SLSTR | Central WL | Width | SSD | NET @ 266 K | Rad. Accuracy @265-310K |
| Channel | (m) | (m) | (km) | (K) | (K) |
| S8 | 10.85 | 0.9 | 1 | 0.050(R)–(0.014)(IF) | <0.1 |
| S9 | 12.00 | 1.0 | 1 | 0.05(R)–(0.022)(IF) | <0.1 |
| ∇ BT Gradients | Bias |
|---|---|
| Subarctic | 0.11 |
| Tropical | 0.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciani, D.; Sabatini, M.; Buongiorno Nardelli, B.; Lopez Dekker, P.; Rommen, B.; Wethey, D.S.; Yang, C.; Liberti, G.L. Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies. Remote Sens. 2023, 15, 1163. https://doi.org/10.3390/rs15041163
Ciani D, Sabatini M, Buongiorno Nardelli B, Lopez Dekker P, Rommen B, Wethey DS, Yang C, Liberti GL. Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies. Remote Sensing. 2023; 15(4):1163. https://doi.org/10.3390/rs15041163
Chicago/Turabian StyleCiani, Daniele, Mattia Sabatini, Bruno Buongiorno Nardelli, Paco Lopez Dekker, Björn Rommen, David S. Wethey, Chunxue Yang, and Gian Luigi Liberti. 2023. "Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies" Remote Sensing 15, no. 4: 1163. https://doi.org/10.3390/rs15041163
APA StyleCiani, D., Sabatini, M., Buongiorno Nardelli, B., Lopez Dekker, P., Rommen, B., Wethey, D. S., Yang, C., & Liberti, G. L. (2023). Sea Surface Temperature Gradients Estimation Using Top-of-Atmosphere Observations from the ESA Earth Explorer 10 Harmony Mission: Preliminary Studies. Remote Sensing, 15(4), 1163. https://doi.org/10.3390/rs15041163