
Motion Compensation for Long Integration Times and DoA Processing in Passive Radars

 and
and
Abstract
1. Introduction
- 1.
- First detection and tracking performances are used to characterized the targets movements during the acquisition time to define a set of discrete possible target bistatic accelerations.
- 2.
- Doppler migration compensation is performed using a filter bank generating a set of Range-Doppler Maps (RDMs) for each single element of the surveillance array and each considered target bistatic acceleration. As the integration gain is expected to be increased, the detector and tracker are again performed. The bistatic tracker results for each acceleration are combined to obtain an improved target trajectory declaration.
- 3.
- For each target trajectory, the acceleration and velocity information are extracted to perform the Doppler and range compensation at a single radiation element level.
- 4.
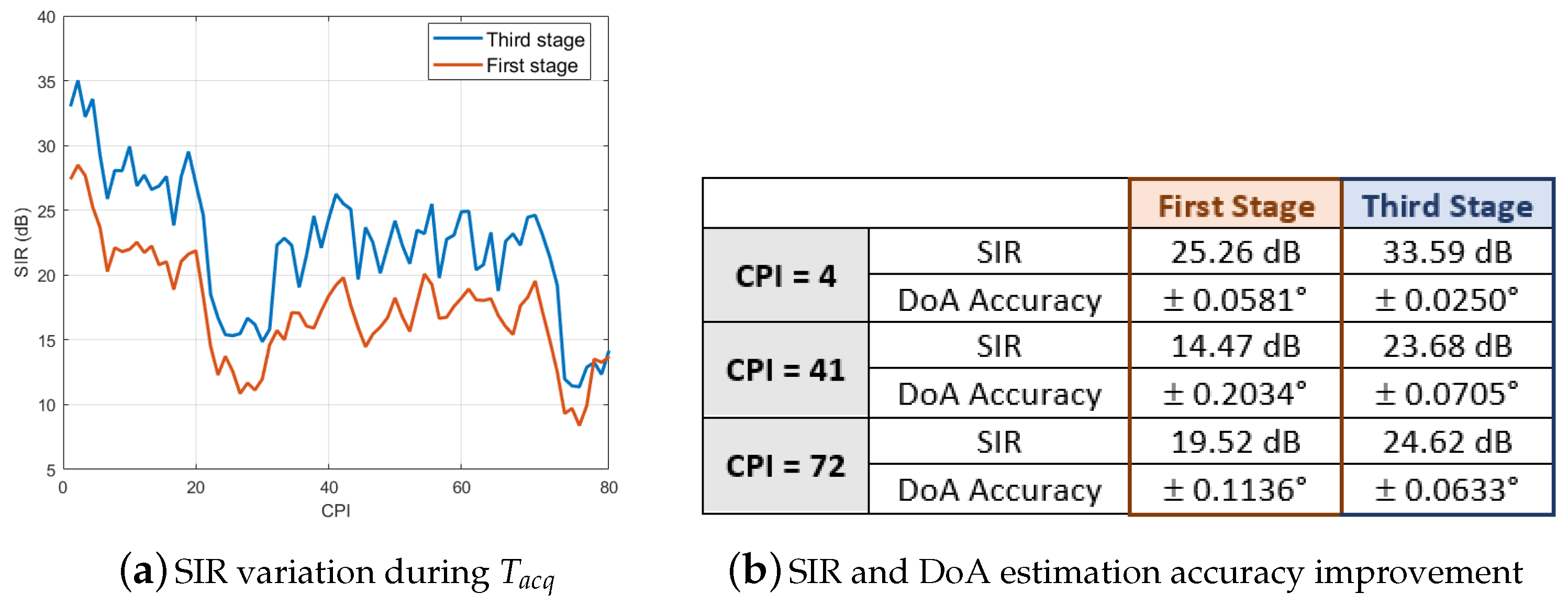
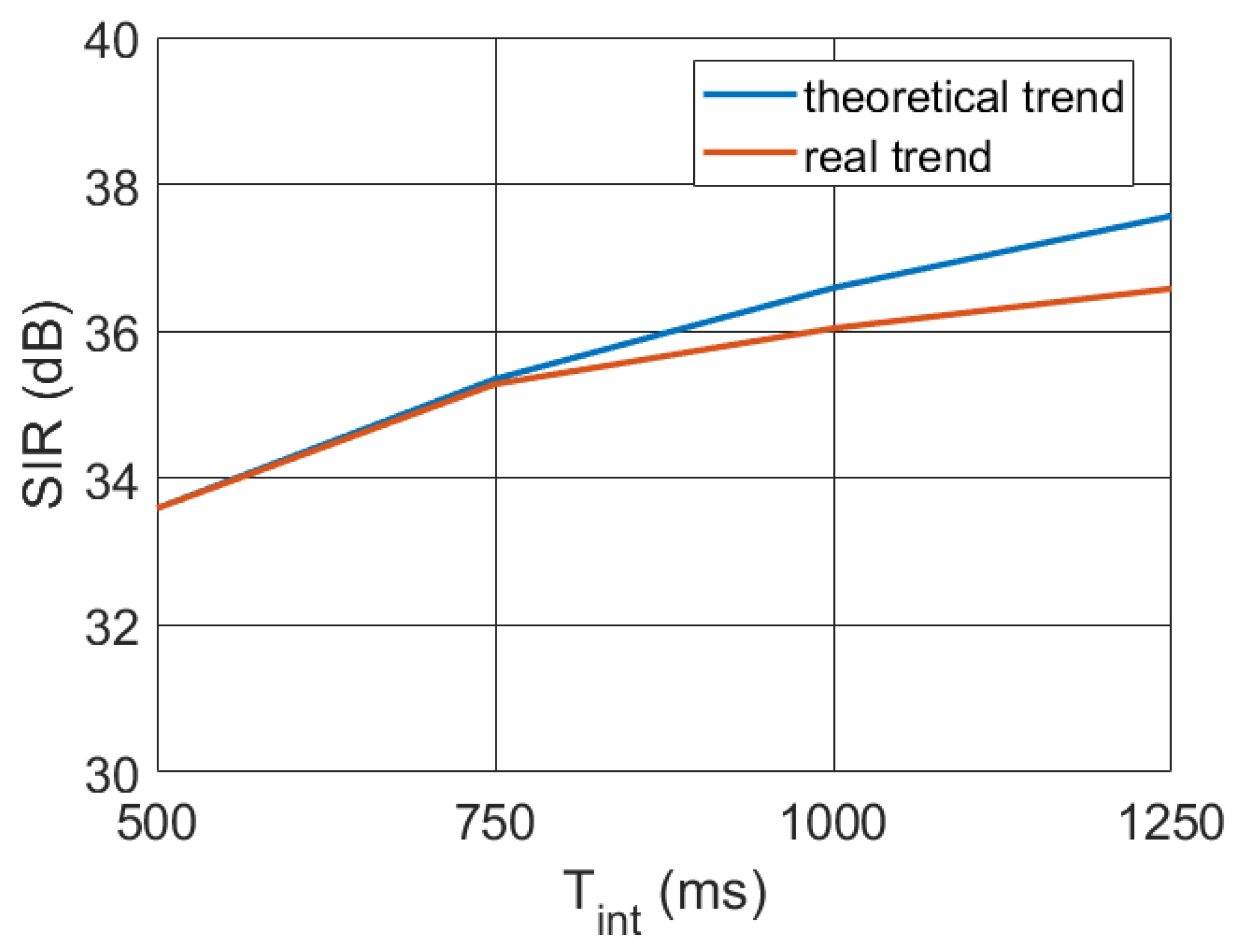
- The final signal-to-interference ratio (SIR) values will outperform those achieved without target motion compensation techniques, allowing for detection capabilities improvement and range and azimuth-tracking-accuracy enhancement.
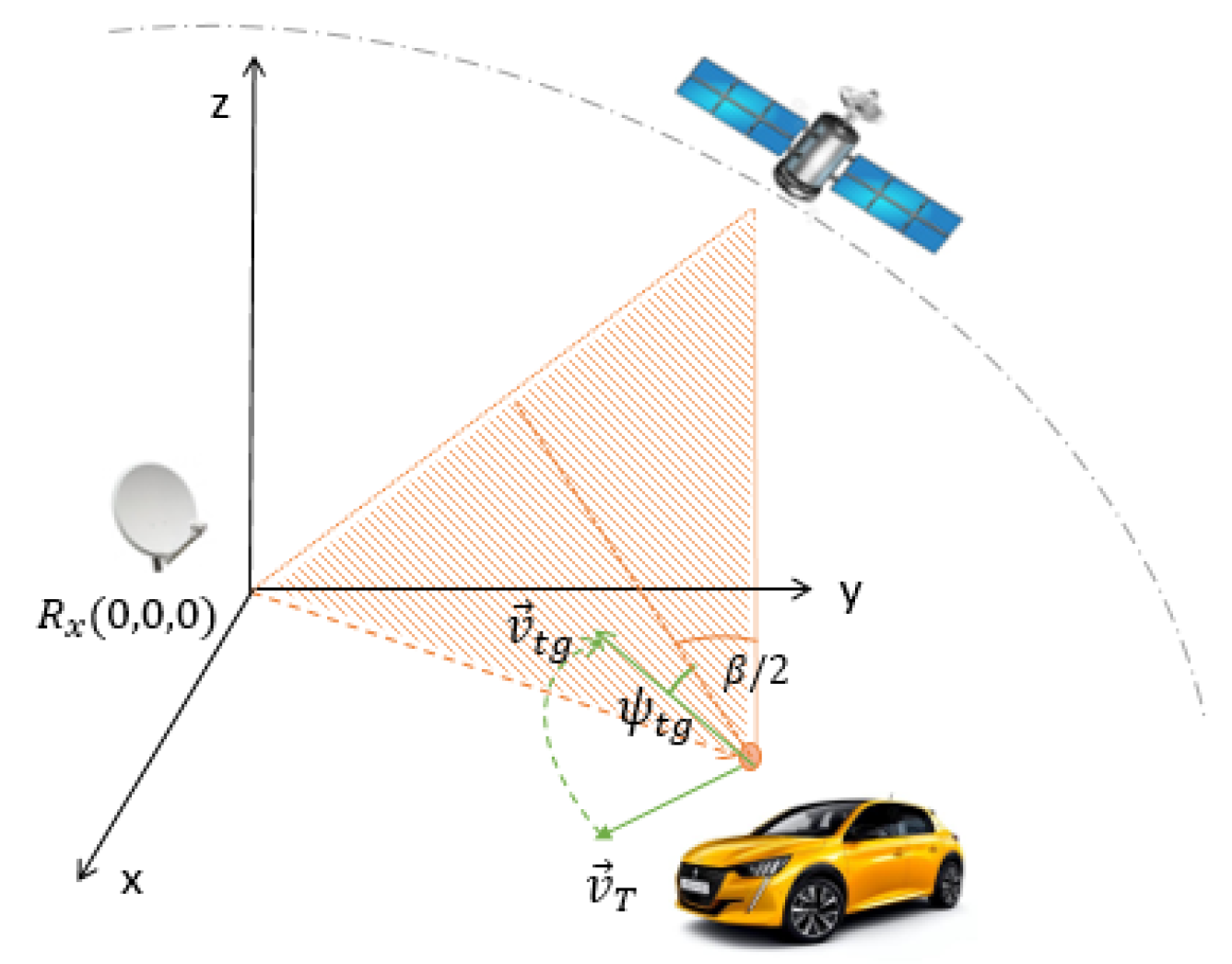
2. Passive Radar Operating Principle
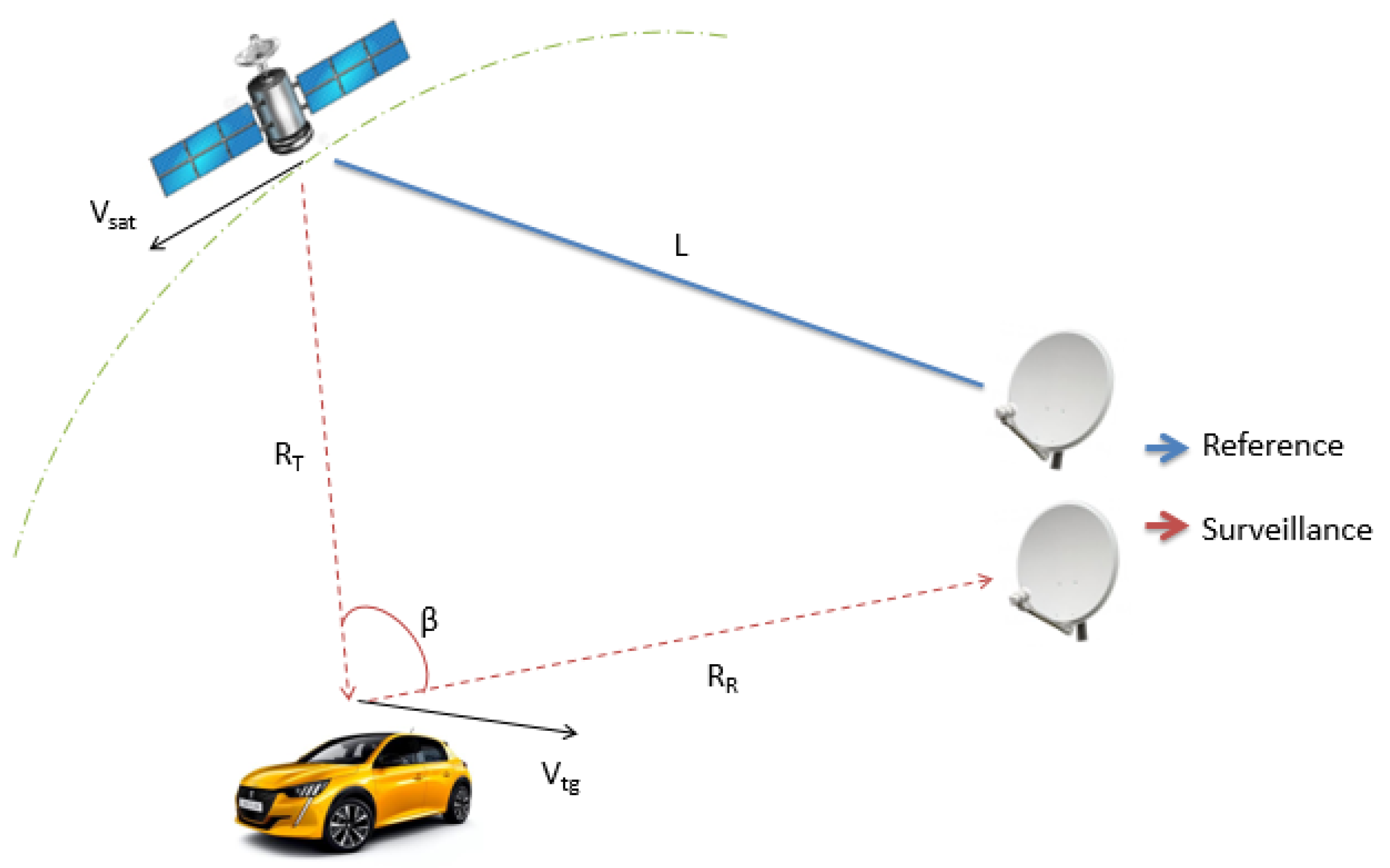
- , is the number of sample acquired during (s), which defines the duration of the coherent processing interval (CPI), and (Hz) is the sampling frequency;
- is the time bin associated with a delay , with M being the number of range cells for a given instrumented radar coverage and .
- is the Doppler-shift, corresponding to , with P being the number of Doppler shift cells for a the Doppler interval of interest defined in .
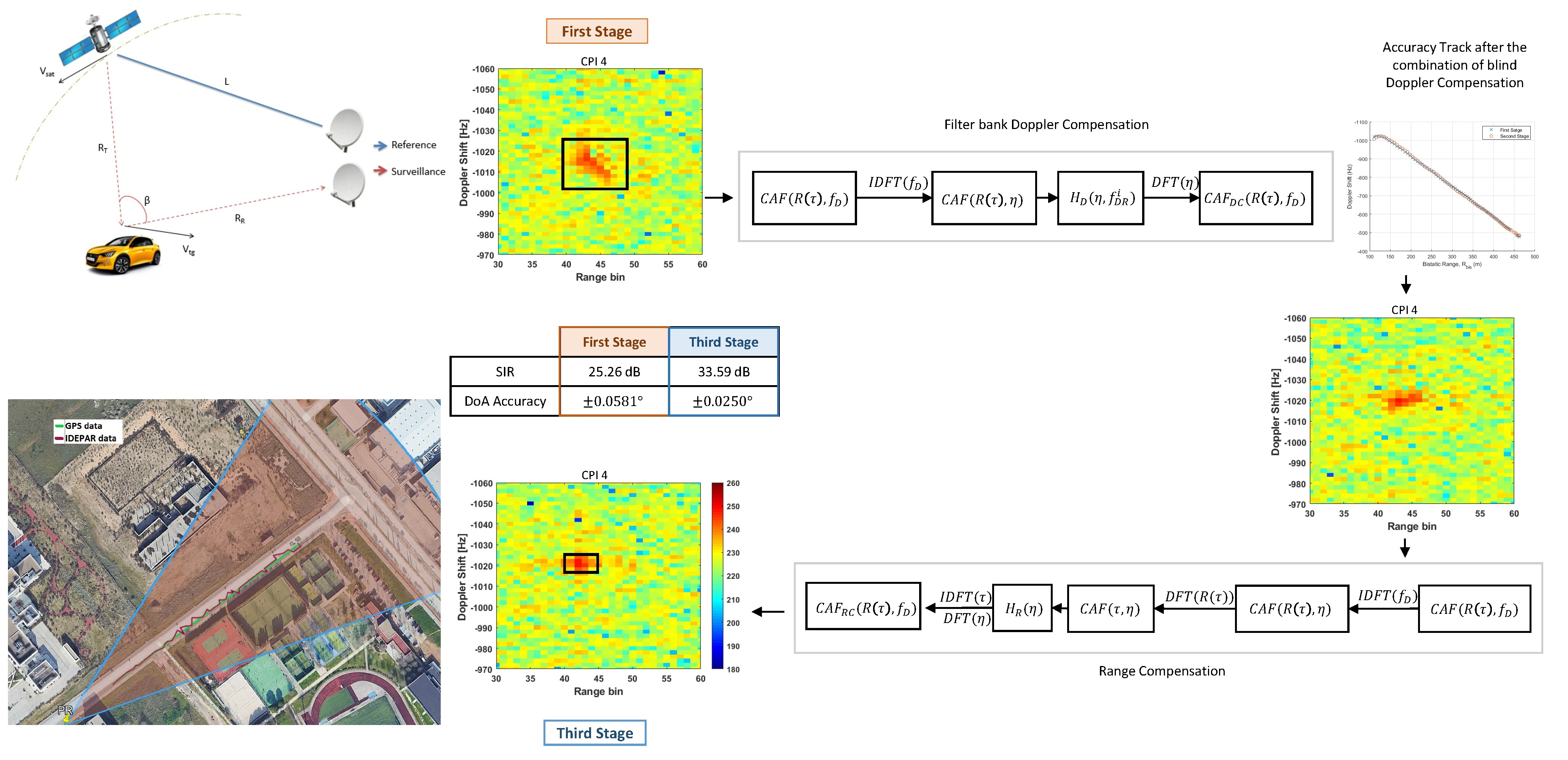
3. Bistatic Scenarios with Stationary PR and IoO
- is the carrier frequency.
- and are the complex gain factors for the reference and the surveillance signals, respectively. The propagation effects and clutter and target contributions are considered, but possible reference channel multipaths are discarded.
- .
- is the target bistatic delay at or .
- is the phase constant associated with or .
4. Long Integration Time Passive Radar Processing
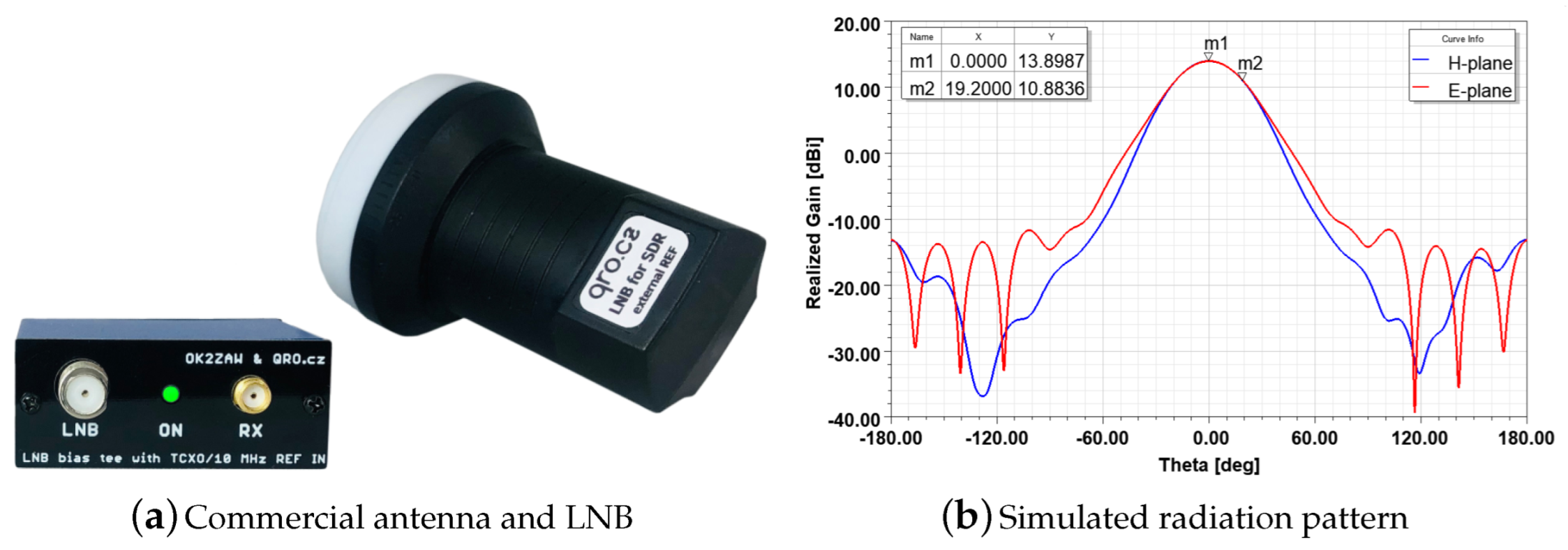
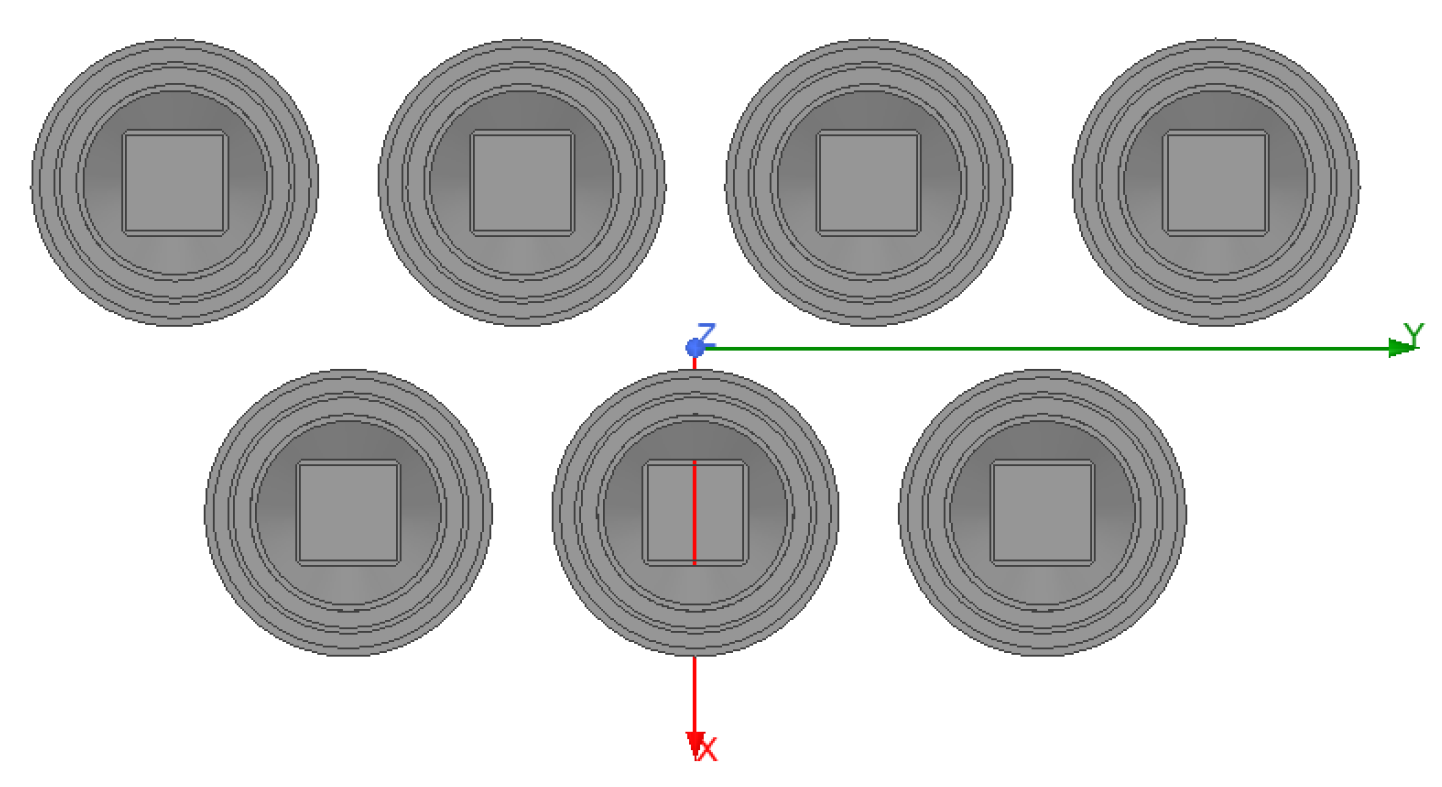
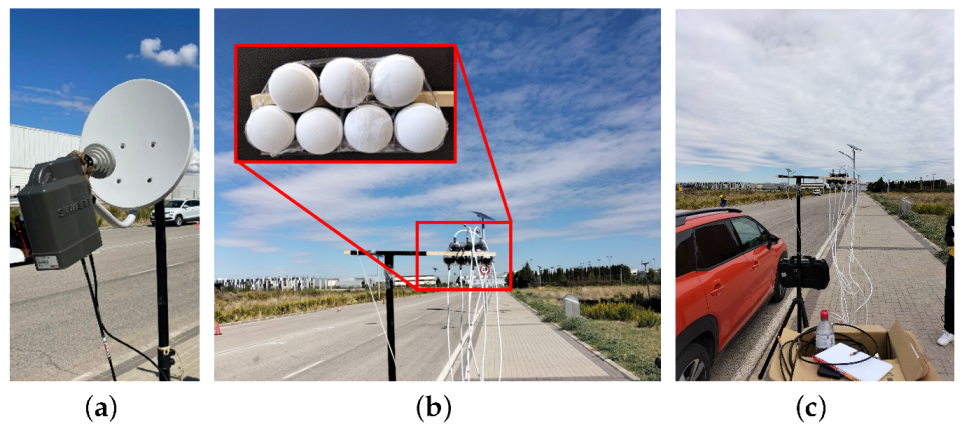
5. IDEPAR Demonstator for DVB-S
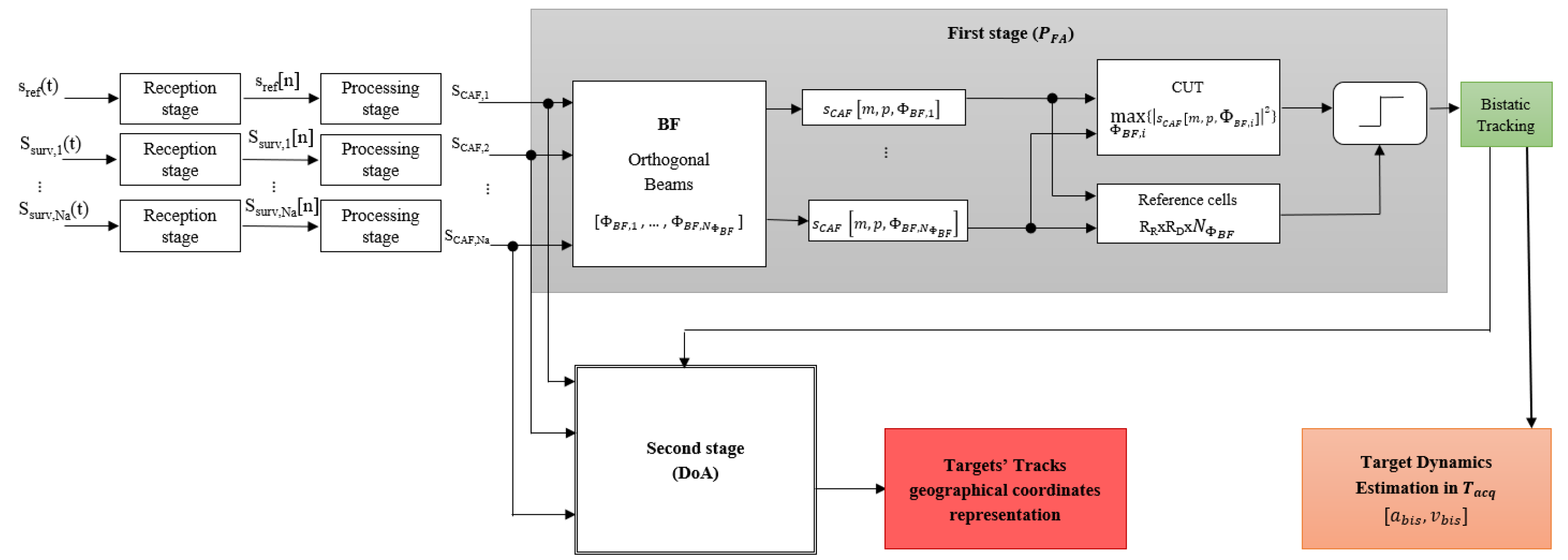
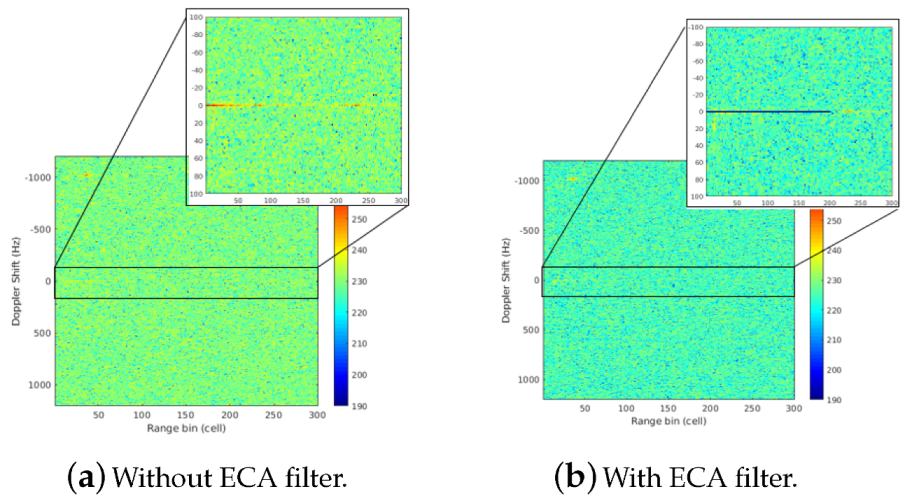
- The reception stages include RF-front ends and digitalization processes. In the processing stages, zero Doppler interference rejection techniques are applied to obtain the snapshot defined in the time domain: , where T denotes the transpose vector. These techniques are applied to reduce DPI (direct path interference), multipath, and stationary clutter sources.
- The acquisition time is divided into CPIs of duration , and independent CAFs are calculated for each single radiating element signal , . These are denoted as CAFs .
- Digital beamforming is applied in the CAF domain to generate orthogonal beams pointing to azimuths within the azimuth coverage without grating lobes ambiguities. The use of orthogonal beams guarantees that a signal arriving along the maximum radiation axis of a beam will have no output in any other beam, and that a signal that is not along the maximum radiation axis will appear in the side lobes of the other beams [38]. The result is a three dimensional matrix called .
- 3D reference window CFAR constant false alarm rate: (a) For each pair, the cell under test (CUT) is the cell for the value where the maximum power of the echo was received; (b) a 3D reference window with dimensions (range x Doppler x steering angle) was generated using the neighbour cells around the CUT, excluding the guard cells defined along range and Doppler for all of the steering angles. This 3D reference window also excludes , .
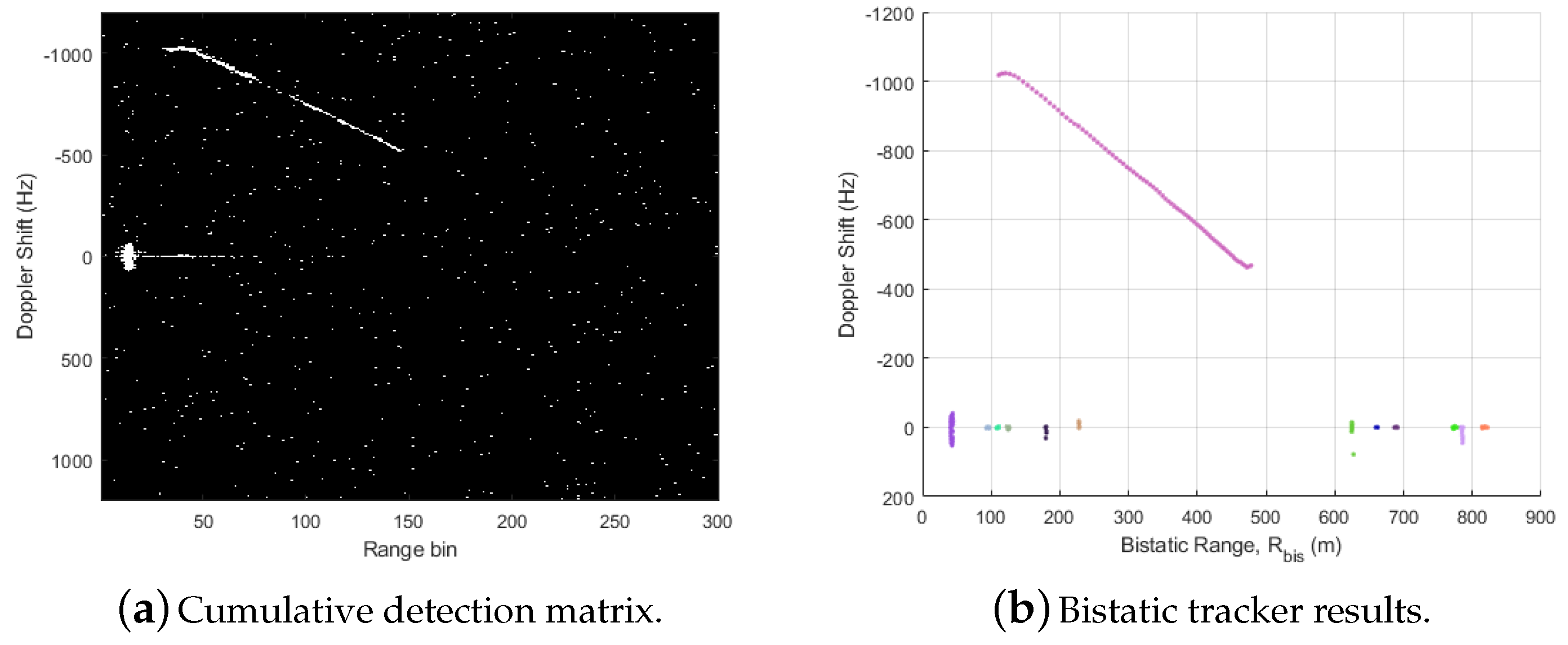
- The detection matrix generated by the 3D reference window CFAR is applied to a bistatic tracker. The linear functions that govern the dynamic model in the bistatic range-Doppler domain, and the direct relation with the measurement vector, make the linear Kalman filter the optimum solution in terms of root-mean-square error (RMSE) [39]. Tracking results consist of declared target trajectories that can be used to estimate target parameter dynamics or to provide the DoA estimation stage input.
- The DoA estimation is carried out in a new beam-space with better accuracy and better resolution, using beamforming weights calculated for maximizing the directivity. The resulting 3D (range-Doppler-azimuth) estimations are processed by a Cartesian tracker to obtain the target’s location in the (x-y) plane. The coordinate transformation is performed by non-linear functions that depend on the definition of the PR scenario. Due to the non-linearities of the measurement model, the optimal filter is also non-linear, and suboptimal solutions can be considered: coordinate transformation in combination with a linear Kalman filter [40], an extended Kalman filter [41], or unscented Kalman filter [42]-based solutions. Detection to track the association process for confirmed targets is performed directly from the Cartesian tracks’ estimations.
6. Multi-Stage Range-Doppler Migration Compensation
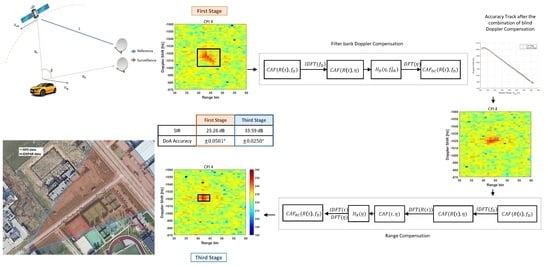
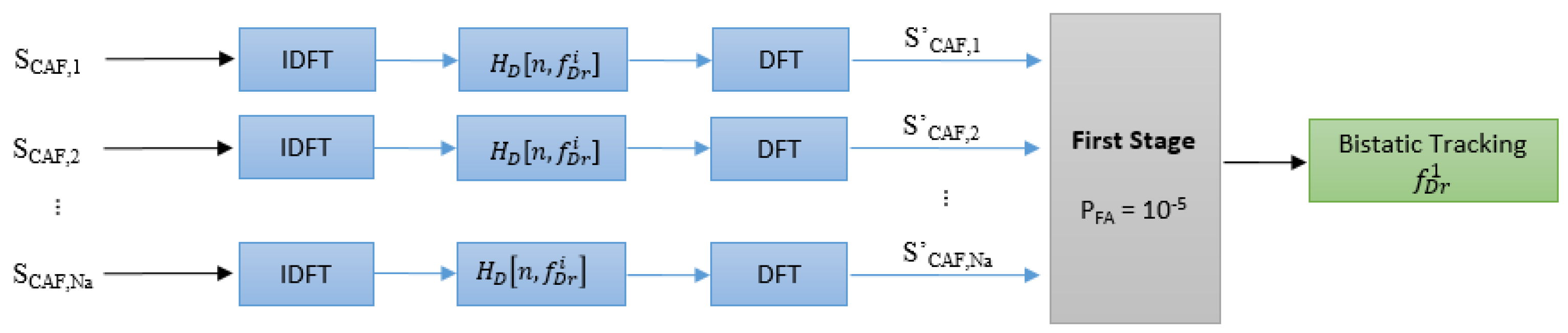
- First Stage: Although a first detection at single element level would simplify the process, bistatic tracker results after beamforming technique are used (Figure 6) due to the high propagation losses and the reduced integration gain. As target contributions are spread throughout the 3D matrix , the probability of detecting such a target can be improved by increasing the probability of false alarm and using the bistatic tracker to control the excess of false alarms.
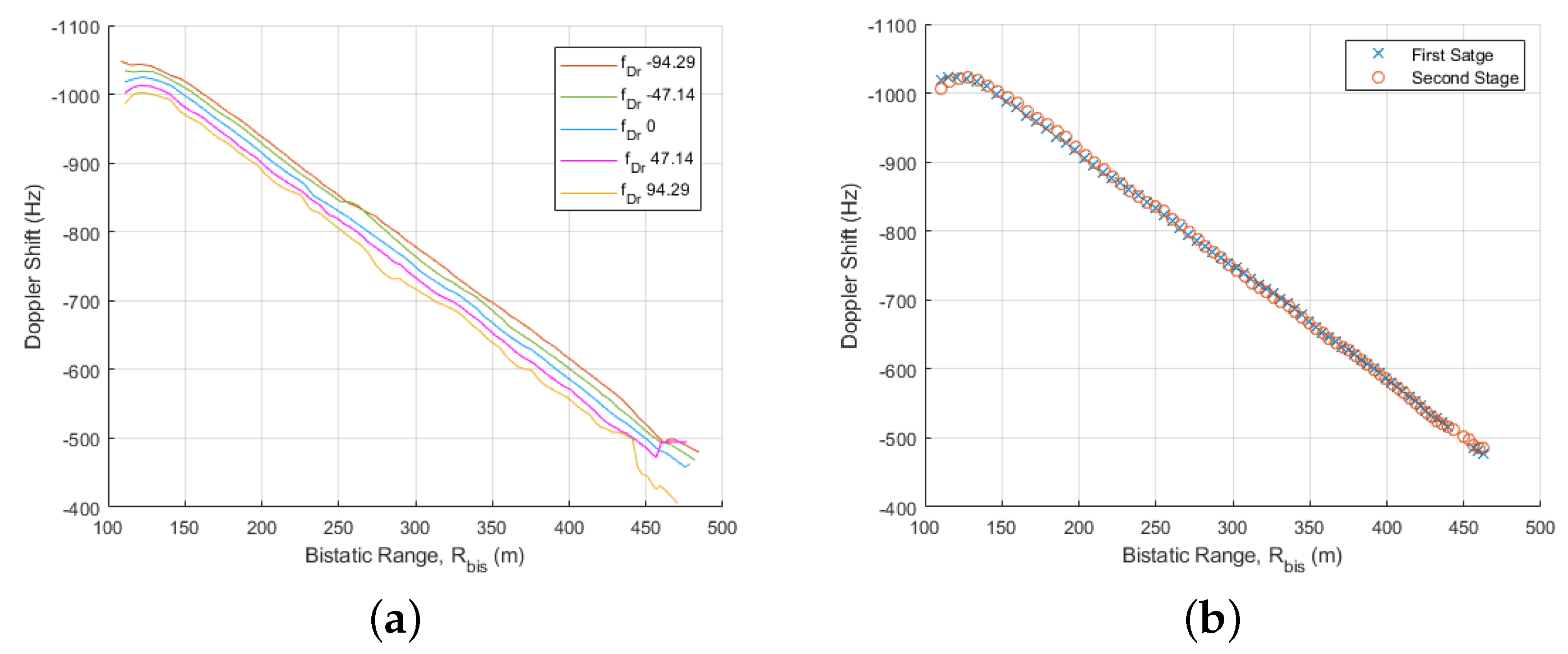
- Doppler migration compensation filter bank: Once possible target trajectories are declared in the area of interest, the associated bistatic velocities and accelerations can be used for the definition of discrete values, associated with Doppler rates from to , which will be considered to perform Doppler migration compensation and to improve target detection capabilities. should be selected as a compromise between accuracy and computational cost.For one specific value , the compensation technique is based on applying inverse discrete Fourier transform (IDFT) expressed in Equation (8). In other words, IDFT performing across the p-axis () or Doppler axis of the RDMs. If the expression of is substituted, the equality (9) is obtained where a -dependent term responsible for the Doppler walk appears.
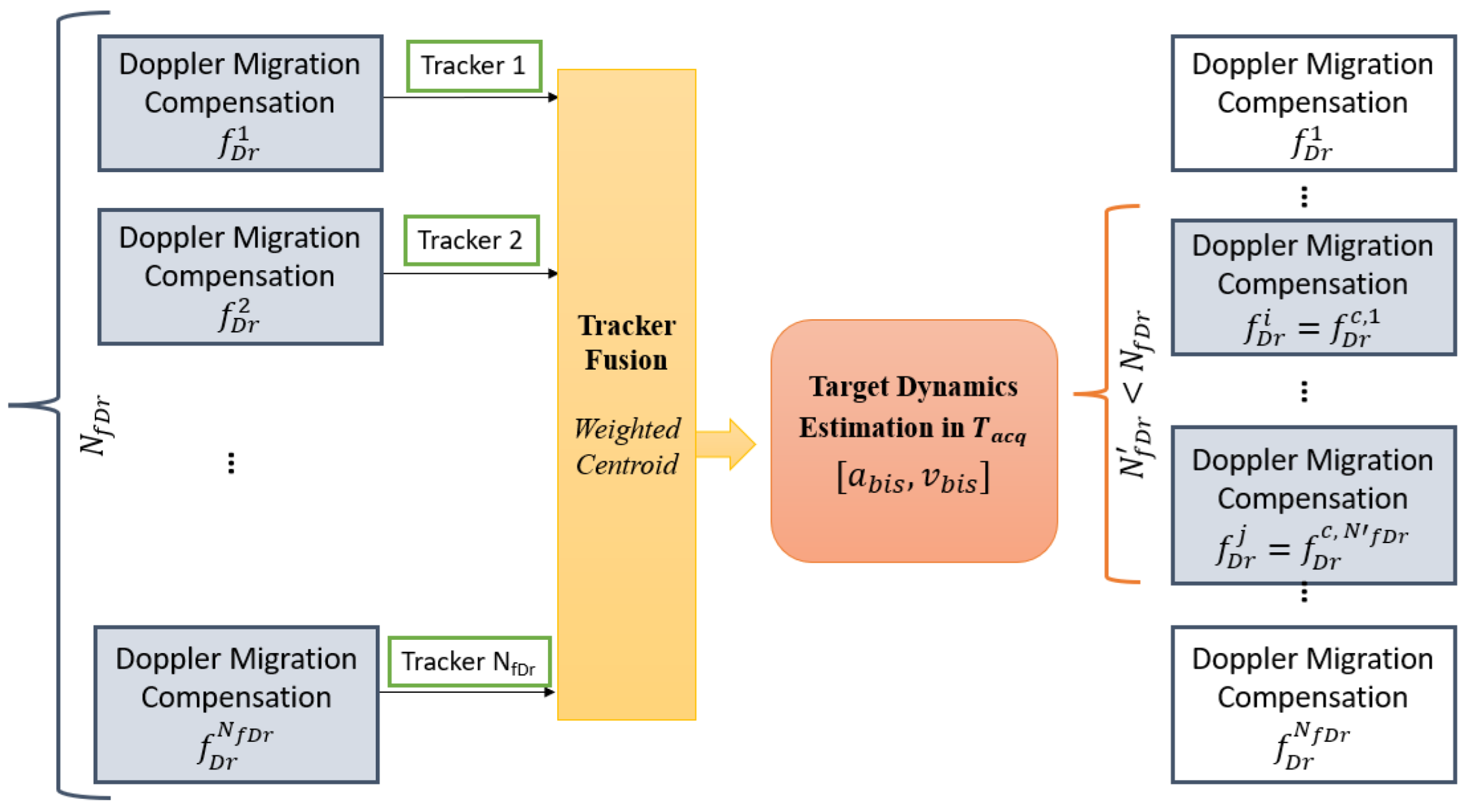
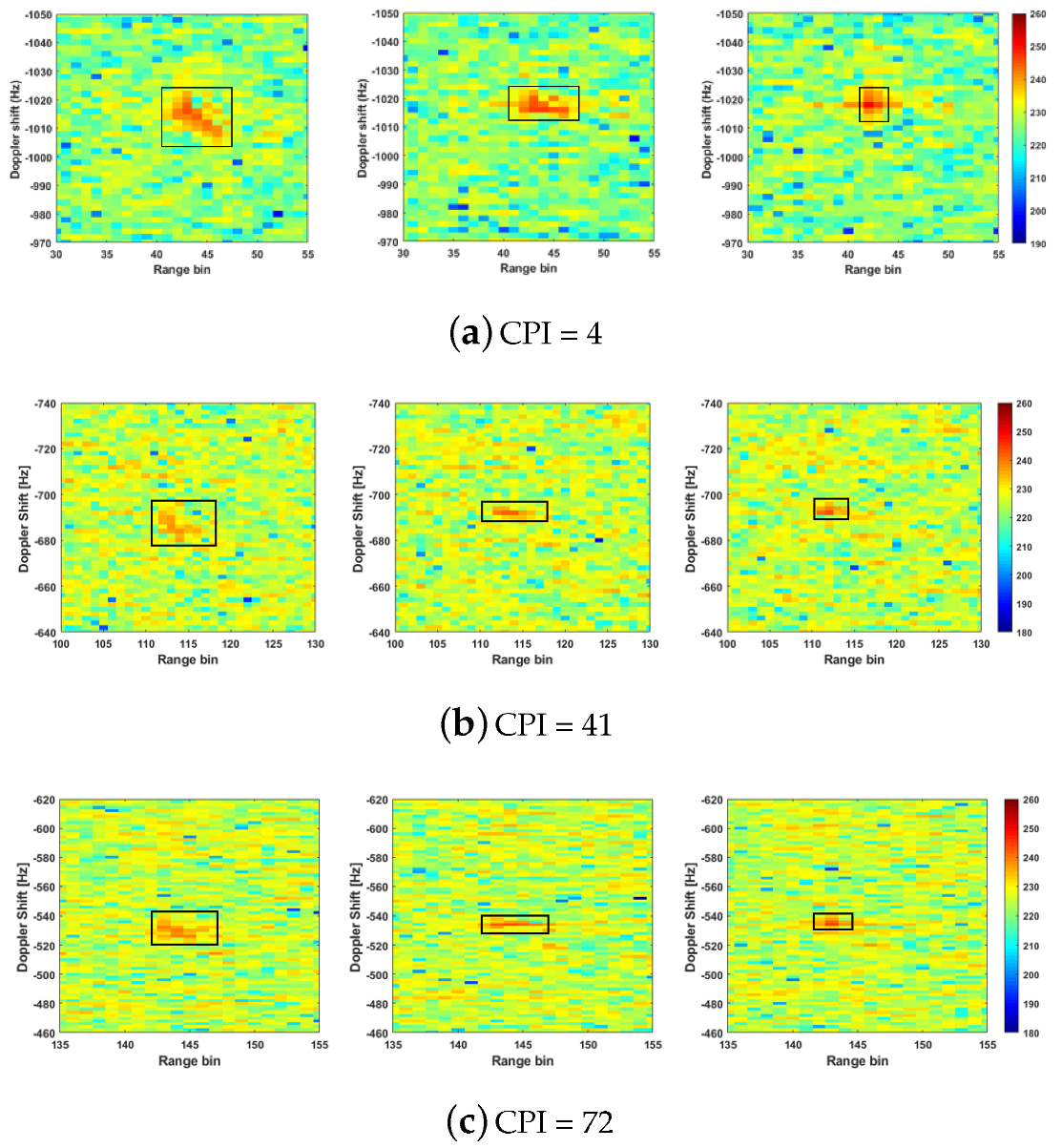
- Second Stage: The inputs of each filter are the CAFs generated by each single antenna of the surveillance array (Figure 7). The detection and tracking stages are performed with higher requirements to the outputs of each filter , where an SIR improvement is expected to be associated with Doppler migration compensation. The tracking results are combined using a weighted centroid of the target detected pixels and their SIRs in each CPI to obtain target trajectories in with more accuracy.At the output of the considered detector, the detection matrix is generated, and a target can be observed in a set of cells depending on its size and kinematics. The target position (range-Doppler in the RDM) could be estimated by the data extractor. This extractor applies algorithms such as the flood-fill algorithm, which connects all of the hints associated with a target and estimates the target position in the system coordinates. These estimated values define a point in the input 2D space, which is denoted as the plot associated with the target. Once the connected hints are detected, the centroid related to each blob is calculated as its center of mass considering the corresponding pixels intensity or outputs of the envelope detector.For each declared target trajectory, a mean value of Doppler Shift rate during , , is estimated to define a constrained version of the filter bank with filters designed for ,…, values close to (Figure 8). For the next stage and for each CPI, only the corrected CAFs associated with the filter designed the that provides the highest SIR are selected. This strategy is based on refining the Doppler migration compensation in case the target bistatic acceleration is not constant during .
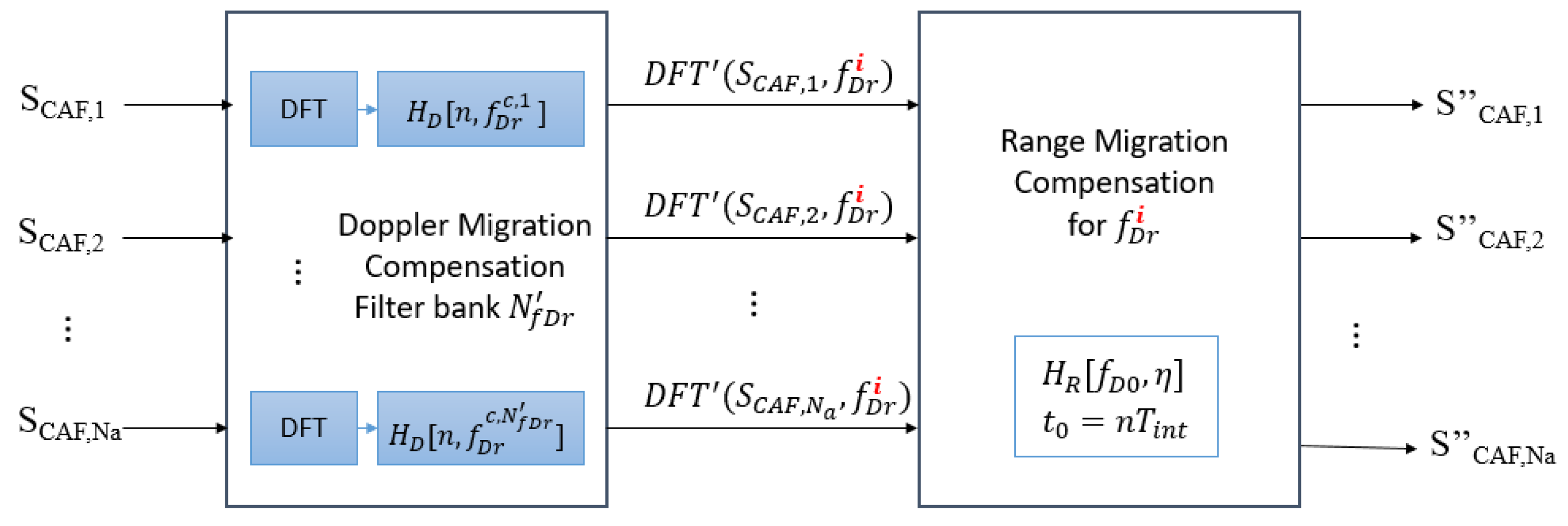
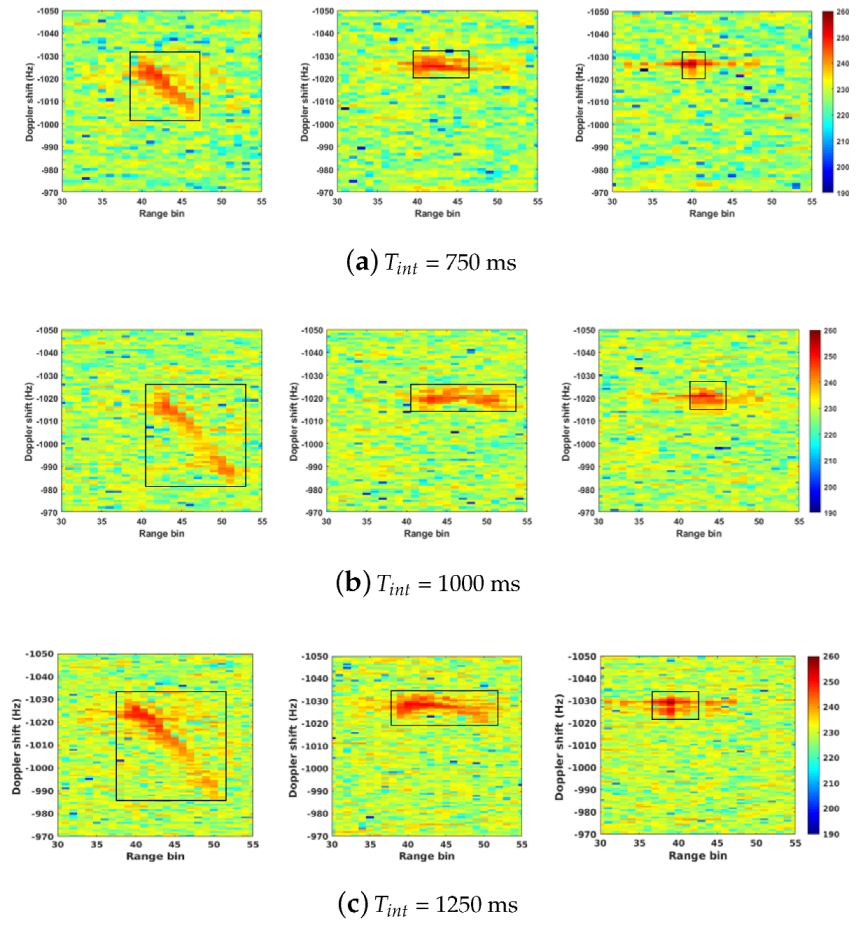
- Third Stage: Before range migration correction is performed, the discrete Fourier transform (DFT) of expression (11) is used and detailed in (12). In this case, DFT is performed across the m-axis () or bistatic range axis of the RDMs. With a change of variable , the result (13) can be expressed in the function of the DFT of the surveillance signal corrected version.The use of the expression of and the properties of the DFT leads to a -dependent exponential, responsible for the range migration, defined in (14). Then, the filter , (15) is implemented to obtain an updated version of the surveillance signal, , and to implement the range target motion compensation expressed in (16).In Figure 9, the scheme to implement the target motion compensation using the CAF generated at each surveillance antenna, the outputs of Doppler filter designed for closest to the bistatic acceleration in each CPI, and the range migration filter are depicted. The resulted CAFs (17) will present a better integration gain of coherent signal processing despite the considered long integration time.
7. Experimental Results
- ms (for m/s and MHz).
- m/s2 (for ms and GHz).
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Willis, N.J. Bistatic Radar; SciTech Publishing Inc.: Raleigh, NC, USA, 2005. [Google Scholar]
- Howland, P.E.; Makisimiut, D.; Reitsma, G. FM radio based bistatic radar. IEE Proc. Radar Sonar Navig. 2005, 152, 107–115. [Google Scholar] [CrossRef]
- Coleman, C.; Watson, R.; Yardley, H. A practical bistatic passive radar system for use with DAB and DRM illuminators. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar]
- Saini, R.; Cherniakov, M. DTV signal ambiguity function analysis for radar applications. IEE Proc. Radar Sonar Navig. 2005, 152, 133–142. [Google Scholar] [CrossRef]
- Jarabo-Amores, M.P.; Bárcena-Humanes, J.L.; Gomez-del Hoyo, P.J.; del Rey-Maestre, N.; Juara-Casero, D.; Gaitán-Cabañas, F.J.; Mata-Moya, D. IDEPAR: A multichannel digital video broadcasting-terrestrial passive radar technological demonstrator in terrestrial radar scenarios. IET Radar Sonar Navig. 2016, 11, 133–141. [Google Scholar] [CrossRef]
- Pisciottano, I.; Cristallini, D.; Pastina, D. Maritime target imaging via simultaneous DVB-T and DVB-S passive ISAR. IET Radar Sonar Navig. 2019, 13, 1479–1487. [Google Scholar] [CrossRef]
- Rosado-Sanz, J.; Jarabo-Amores, M.; Mata-Moya, D.; Dauvignac, J.; Lanteri, J.; Migliaccio, C. High Gain Sectorial Beam Reflectarray Design for DVB-S Passive Radar through Multi-Beam Optimization. In Proceedings of the 2020 23rd International Microwave and Radar Conference (MIKON), Warsaw, Poland, 5–8 October 2020; pp. 361–366. [Google Scholar] [CrossRef]
- del Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.; Gómez-del Hoyo, P.; Bárcena-Humanes, J.; Rosado-Sanz, J. Passive Radar Array Processing with Non-Uniform Linear Arrays for Ground Target’s Detection and Localization. Remote Sens. Spec. Issue Radar Syst. Soc. Chall. 2017, 9, 756. [Google Scholar] [CrossRef]
- Gómez-Del-Hoyo, P.; del Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.P.; Martín-Nicolás, J. First results on ground targets tracking using UHF passive radars under non line-of-sight conditions. In Proceedings of the 2015 Signal Processing Symposium (SPSympo), Debe, Poland, 10–12 June 2015; Volume 1, pp. 1–4. [Google Scholar]
- Jarabo-Amores, M.P.; Mata-Moya, D.; Gómez-del-Hoyo, P.J.; Bárcena-Humanes, J.L.; Rosado-Sanz, J.; Rey-Maestre, N.; Rosa-Zurera, M. Drone detection feasibility with passive radars. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 313–316. [Google Scholar]
- Olivadese, D.; Giusti, E.; Petri, D.; Martorella, M.; Capria, A.; Berizzi, F. Passive ISAR With DVB-T Signals. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4508–4517. [Google Scholar] [CrossRef]
- Jarabo-Amores, M.P.; Rosa-Zurera, M.; Mata-Moya, D.; Capria, A.; Saverino, A.L.; Callegari, C.; Berizzi, F.; Samczynski, P.; Kulpa, K.; Ummenhofer, M.; et al. Distributed Physical Sensors Network for the Protection of Critical Infrastractures Against Physical Attacks. In Proceedings of the 13th International Joint Conference on e-Business and Telecommunications (ICETE 2016), Lisbon, Portugal, 26–28 July 2016; pp. 139–150. [Google Scholar] [CrossRef]
- Rosado-Sanz, J.; Jarabo-Amores, M.P.; Dauvignac, J.Y.; Mata-Moya, D.; Lanteri, J.; Migliaccio, C. Design and Validation of a Reflectarray Antenna with Optimized Beam for Ground Target Monitoring with a DVB-S-Based Passive Radar. Sensors 2021, 21, 5263. [Google Scholar] [CrossRef] [PubMed]
- Cristallini, D.; Caruso, M.; Falcone, P.; Langellotti, D.; Bongioanni, C.; Colone, F.; Scafè, S.; Lombardo, P. Space-based passive radar enabled by the new generation of geostationary broadcast satellites. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–11. [Google Scholar] [CrossRef]
- Marques, P.; Ferreira, A.; Fortes, F.; Sampaio, P.; Rebelo, H.; Reis, L. A pedagogical passive RADAR using DVB-S signals. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Republic of Korea, 26–30 September 2011; pp. 1–4. [Google Scholar]
- Martelli, T.; Cabrera, O.; Colone, F.; Lombardo, P. Exploitation of Long Coherent Integration Times to Improve Drone Detection in DVB-S based Passive Radar. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Cabrera, O.; Bongioanni, C.; Filippini, F.; Sarabakha, O.; Colone, F.; Lombardo, P. Detecting drones and human beings with DVB-S based COTS passive radar for short-range surveillance. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 37–42. [Google Scholar] [CrossRef]
- Ummenhofer, M.; Lavau, L.C.; Cristallini, D.; O’Hagan, D. UAV Micro-Doppler Signature Analysis Using DVB-S Based Passive Radar. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 1007–1012. [Google Scholar]
- Rosado-Sanz, J.; Jarabo-Amores, M.P.; Mata-Moya, D.; del Rey-Maestre, N.; Almodóvar-Hernández, A. DVB-S Passive Radar Performance Evaluation in Semi-Urban Ground Scenario. In Proceedings of the 2020 21th International Radar Symposium (IRS), Warsaw, Poland, 5–8 October 2020; pp. 1–4. [Google Scholar]
- Li, J.; Wei, J.; Cao, Z.; Chen, Q.; Yang, L.; Song, C.; Xu, Z. A DVB-S-Based Multichannel Passive Radar System for Vehicle Detection. IEEE Access 2021, 9, 2900–2912. [Google Scholar] [CrossRef]
- Filippini, F.; Cabrera, O.; Bongioanni, C.; Colone, F.; Lombardo, P. DVB-S based Passive Radar for Short Range Security Application. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 8–14 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Brisken, S.; Moscadelli, M.; Seidel, V.; Schwark, C. Passive radar imaging using DVB-S2. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 0552–0556. [Google Scholar]
- Arcangeli, A.; Bongioanni, C.; Ustalli, N.; Pastina, D.; Lombardo, P. Passive forward scatter radar based on satellite TV broadcast for air target detection: Preliminary experimental results. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1592–1596. [Google Scholar]
- Malanowski, M.; Kulpa, K.; Olsen, K.E. Extending the integration time in DVB-T-based passive radar. In Proceedings of the 2011 8th European Radar Conference, Manchester, UK, 9–14 October 2011; pp. 190–193. [Google Scholar]
- Xu, J.; Peng, Y.N.; Xia, X.G.; Farina, A. Focus-before-detection radar signal processing: Part i—Challenges and methods. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 48–59. [Google Scholar] [CrossRef]
- Xu, J.; Peng, Y.N.; Xia, X.G.; Long, T.; Mao, E.K.; Farina, A. Focus-before-detection radar signal processing: Part ii—Recent developments. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 34–49. [Google Scholar] [CrossRef]
- Zeng, H.C.; Chen, J.; Wang, P.B.; Yang, W.; Liu, W. 2-D Coherent Integration Processing and Detecting of Aircrafts Using GNSS-Based Passive Radar. Remote Sens 2018, 10, 1164. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, P.; Chen, J.; Men, Z.; Liu, W.; Zeng, H. A Modified Radon Fourier Transform for GNSS-Based Bistatic Radar Target Detection. IEEE Geosci. Remote. Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Feng, Y.; Shan, T.; Zhuo, Z.; Tao, R. The migration compensation methods for DTV based passive radar. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, B.; Cha, H.; Zhou, Z.; Tian, B. Clutter Cancellation and Long Time Integration for GNSS-Based Passive Bistatic Radar. Remote Sens. 2021, 13, 701. [Google Scholar] [CrossRef]
- Del-Rey-Maestre, N.; Jarabo-Amores, M.P.; Mata-Moya, D.; Almódovar-Hernández, A.; Rosado-Sanz, J. Planar Array and spatial filtering techniques for improving DVB-S based passive radar coverage. In Proceedings of the 2022 19th European Radar Conference (EuRAD), Milan, Italy, 28–30 September 2022; pp. 1–4. [Google Scholar] [CrossRef]
- He, Z.; Yang, Y.; Chen, W. A Hybrid Integration Method for Moving Target Detection With GNSS-Based Passive Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 1184–1193. [Google Scholar] [CrossRef]
- Santi, F.; Pastina, D.; Bucciarelli, M. Experimental Demonstration of Ship Target Detection in GNSS-Based Passive Radar Combining Target Motion Compensation and Track-before-Detect Strategies. Sensors 2020, 20, 599. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, H.; Long, N. Television-based bistatic radar. IEE Proc. Comun. Radar, Signal Process. 1986, 133, 649–657. [Google Scholar] [CrossRef]
- Gomez-del-Hoyo, P.; Jarabo-Amores, M.; Mata-Moya, D.; Del-Rey-Maestre, N.; Rosa-Zurera, M. DVB-T receiver independent of channel allocation, with frequency offset compensation for improving resolution in low cost passive radar. IEEE Sens. J. 2020, 20, 14958–14974. [Google Scholar] [CrossRef]
- Rosado-Sanz, J.; Jarabo-Amores, M.; Mata-Moya, D.; del Hoyo, P.G.; Del-Rey-Maestre, N. Broadband modified-circle-shape patch antenna with H-aperture feeding for a passive radar array. Aerosp. Sci. Technol. 2021, 110, 106445. [Google Scholar] [CrossRef]
- RemoteQTH. 10 GHz LNB Plus Bias-Tee. Available online: https://www.shf-communication.com/products/rf-passive-components/?gclid=EAIaIQobChMI_u3suZWS_QIVxAWiAx2MvgMbEAAYASAAEgIJzfD_BwE (accessed on 1 May 2021).
- Trees, H.V. Detection, Estimation, and Modulation Theory Part VI: Optimum Array Processing; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Technical Report USA. 1995. Available online: https://perso.crans.org/club-krobot/doc/kalman.pdf (accessed on 1 May 2021).
- Farina, A. Tracking function in bistatic and multistatic radar systems. IEE Proc. F Commun. Radar Signal Process. 1986, 133, 630–637. [Google Scholar] [CrossRef]
- Mochnac, J.; Marchevsky, S.; Kocan, P. Bayesian filtering techniques: Kalman and extended Kalman filter basics. In Proceedings of the 2009 19th International Conference Radioelektronika, Bratislava, Slovakia, 22–23 April 2009; pp. 119–122. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- del-Rey-Maestre, N.; Mata-Moya, D.; Jarabo-Amores, M.; Gómez-del-Hoyo, P.; Rosado-Sanz, J. Statistical Characterization of DVB-S Bistatic Clutter for Ground Target Detection. In Proceedings of the 2019 16th European Radar Conference (EuRAD), Paris, France, 2–4 October 2019; pp. 149–152. [Google Scholar]
- Pastina, D.; Santi, F.; Pieralice, F.; Bucciarelli, M.; Ma, H.; Tzagkas, D.; Antoniou, M.; Cherniakov, M. Maritime Moving Target Long Time Integration for GNSS-Based Passive Bistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 3060–3083. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
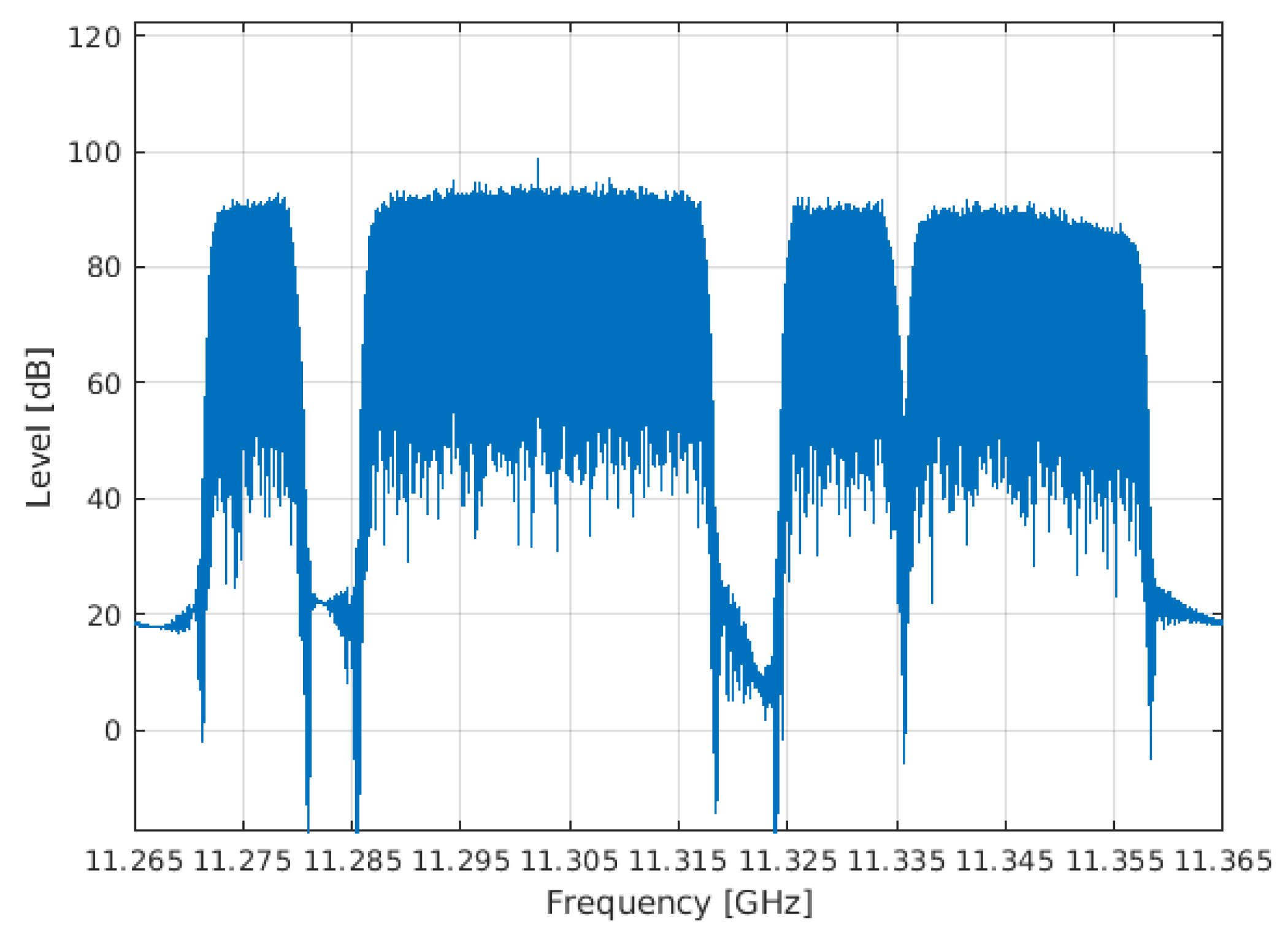
| Hispasat 30W-5 (1E) Channels | ||||
|---|---|---|---|---|
| Central Frequency | 11,276 MHz | 11,302 MHz | 11,330 MHz | 11,347 MHz |
| Polarization | H | H | H | H |
| Modulation | DVB-S2 QPSK | DVB-S2 8PSK | DVB-S2 8PSK | DVB-S2 8PSK |
| IF | 1526 MHz | 1552 MHz | 1580 MHz | 1597 MHz |
| Bandwidth | 7.140 MHz | 30 MHz | 9.140 MHz | 20.858 MHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almodóvar-Hernández, A.; Mata-Moya, D.; Jarabo-Amores, M.-P.; Rey-Maestre, N.; Benito-Ortiz, M. Motion Compensation for Long Integration Times and DoA Processing in Passive Radars. Remote Sens. 2023, 15, 1031. https://doi.org/10.3390/rs15041031
Almodóvar-Hernández A, Mata-Moya D, Jarabo-Amores M-P, Rey-Maestre N, Benito-Ortiz M. Motion Compensation for Long Integration Times and DoA Processing in Passive Radars. Remote Sensing. 2023; 15(4):1031. https://doi.org/10.3390/rs15041031
Chicago/Turabian StyleAlmodóvar-Hernández, Anabel, David Mata-Moya, María-Pilar Jarabo-Amores, Nerea Rey-Maestre, and María Benito-Ortiz. 2023. "Motion Compensation for Long Integration Times and DoA Processing in Passive Radars" Remote Sensing 15, no. 4: 1031. https://doi.org/10.3390/rs15041031
APA StyleAlmodóvar-Hernández, A., Mata-Moya, D., Jarabo-Amores, M.-P., Rey-Maestre, N., & Benito-Ortiz, M. (2023). Motion Compensation for Long Integration Times and DoA Processing in Passive Radars. Remote Sensing, 15(4), 1031. https://doi.org/10.3390/rs15041031