Abstract
This paper discusses the problem of detecting subspace signals in structured interference plus compound Gaussian sea clutter with persymmetric structure. The sea clutter is represented by a compound Gaussian process wherein the texture obeys the inverse Gaussian distribution. The structured interference lies in a known subspace, which is independent with the target signal subspace. By resorting to the two-step generalized likelihood ratio test, two-step Rao, and two-step Wald design criteria, three adaptive subspace signal detectors are proposed. Moreover, the constant false-alarm rate property of the proposed detectors is proved. The experimental results based on IPIX real sea clutter data and simulated data illustrate that the proposed detectors outperform their counterparts.
1. Introduction
In recent years, adaptive signal detection has received considerable attention in radar, sonar, and communications [1,2]. The most representative adaptive radar target detectors are Kelly’s generalized likelihood ratio test [3] (GLRT) and Robey’s two-step GLRT, which is also called the adaptive matched filter [4]. In the classical detectors, the signal is assumed as the product of the unknown amplitude and the completely known steering vector. However, the signal signature is always uncertain due to the beampointing error, uncalibrated arrays, sidelobe targets, etc. Subspace model is an effective way to deal with the steering vector uncertain [5]. In some other applications such as polarimetric detection [6], the signal can also be formulated by a subspace model.
To detect subspace signals, Kraut [7] derived the adaptive subspace detector in the partially homogeneous noise wherein the training data can accurately represent the noise structure but not the noise level. In [8], a new modified Rao test is proposed by introducing a tunable parameter, and the analytical expressions for the false-alarm and detection probabilities of the modified Rao test are also given. Kelly’s GLRT and the traditional Rao test are two special cases of the modified Rao test. Detection of subspace signals in the presence of the signal-dependent interference wherein the clutter depends on the transmit signal is considered in [9]. The problem of detecting subspace random signals in the compound Gaussian clutter is discussed in [10], and the optimum Neyman–Pearson detector, GLRT-based detector, and constant false-alarm rate (CFAR) detector have been proposed.
In practical radar target detection scenarios, besides clutter, radar echoes are often contaminated by unintentional or intentional interference released by civil broadcasting and electronic countermeasure systems [11,12,13,14]. Among them, coherent interference can deceive the radar by generating false targets and seriously degrade radar performance [15,16]. When prior information of coherent interference can be obtained by electronic support measures, etc.; it is also called subspace interference or structured interference. The point-like signals detection problem in Gaussian clutter and subspace interference was discussed in [17]. Two Wald-based detectors are designed in homogeneous and partially homogeneous environment under the condition that the interference belongs to a subspace with unknown coordinates. For the detection of distributed targets, one-step and two-step GLRT decision rules [18] were utilized to design detectors in subspace interference plus homogeneous and partially homogeneous clutter. In [19], persymmetric property was exploited to improve detection performance for multi-rank subspace signals detection in partially homogeneous clutter and structured interference. By modeling the texture as a random variable, Gao [20] et al. considered distributed targets detection problem in structured interference and pareto-distributed clutter.
Most of the above works assume that the clutter is Gaussian. The assumption is invalid for sea clutter especially when grazing angles are low, or high-resolution radars are used. The compound Gaussian clutter model is a popular model to describe sea clutter and has been demonstrated by experimental data and theoretical arguments. In [21], the authors discussed detection problem of radar targets in compound Gaussian with inverse Gaussian texture (CG-IG) clutter and showed that CG-IG can fit sea clutter better in some cases than pareto-distribution and K-distribution clutter. However, detectors in [21] were designed without taking into account the interference. Since there is no uniformly most powerful invariant test for the detection problem at hand, the GLRT may not be the best decision rule. In addition to GLRT, Rao and Wald tests only need to estimate unknown parameters under hypothesis or , which usually has a smaller computational cost.
Thus, in this paper, we propose three adaptive subspace detectors for radar target detection by resorting to the two-step Rao test, two-step Wald test, and two-step GLRT decision rules in structured interference plus CG-IG clutter. In nonhomogeneous scenarios, sufficient training data that are independent and identically distributed with the primary data are difficult to obtain [22,23,24,25]. To reduce the requirement of training data, the persymmetric structure of the clutter covariance matrix (CM) is exploited in this paper. The persymmetric property holds if the radar array is symmetrically distributed about the phase center, or equally spaced pulse trains are utilized [26,27]. We also analyze the CFAR property of the proposed detectors. Experimental results illustrate that the proposed detectors can effectively suppress interference and exhibit good detection performance in the training-limited cases.
We organize the reminder of the paper as follows: In Section 2, we give the formula of the considered detection problem. We design three new subspace signal detectors in Section 3. In Section 4, we carry out experiments based on real data and simulated data to test the detection performance of the new detectors. We draw some conclusions in Section 5.
Notations: Matrices (vectors) are denoted by uppercase (lowercase) bold letters. denotes the dimensional complex matrix. Superscripts , , , and denote conjugate transpose, transpose, conjugate, and inverse. is the real part of a complex matrix. denotes the circularly symmetric complex normal distribution with mean and covariance matrix .
Table 1 gives a list of acronyms used throughout the paper.

Table 1.
Acronyms of the paper.
2. Problem Formula
Assume that radar echoes are acquired from spatial or/and temporal channels. The primary data are denoted as an -dimensional column vector . The training data, which contain the disturbance only [16,20], are denoted by . We want to decide whether the received data contain the target signal or not. We express the detection problem to be solved as the binary hypothesis testing as follows:
where and are the useful target signal and the interference. The interference and target signal belong to two linearly independent subspaces and , . and are both known full-column-rank matrices [11,17,18,19,20], is unknown signal coordinate, and is unknown interference coordinate.
The clutter and follow the compound Gaussian distribution: , . The speckle component satisfies: . Since the CG-IG clutter can describe sea clutter well and provide better fit than the K distribution or the pareto distribution for the sea clutter in some situations, we assume that obeys the inverse Gaussian distribution:
where and are scale and shape parameters.
According to Proposition 1 in [28], we constructed a unitary matrix to exploit the persymmetric structure. The unitary matrix is defined as
where is an -dimensional identity matrix; is a permute matrix whose antidiagonal elements are 1, and the other elements are 0. Multiplying by the unitary matrix , the detection problem (1) can be reformulated as
where , , , , , , , and . From above definitions, the probability density functions (PDFs) of the primary data is
where denotes null hypothesis , and denotes alternative hypothesis .
3. Adaptive Persymmetric Detectors Design
Since it is mathematically intractable to derive one-step detectors in compound Gaussian clutter when the texture is random [29], we resort to the two-step Rao test, two-step Wald test, and two-step GLRT to detect targets.
3.1. Adaptive Two-Step Persymmetric GLRT
The GLRT based on the primary data with known speckle CM is
Plugging (2) and (4) into (5), we have the integration terms in the denominator:
where , is the modified Bessel function of the second kind with order . We get the integration results under in a similar way:
where , , and .
We obtain the maximum likelihood estimates (MLEs) of and by taking the derivative of (6) and (7) with respect to and and setting the results to zero. Let , . According to the property of the modified Bessel function of the second kind [30], we have
After some calculation, we can obtain the MLEs of and
In the compound Gaussian clutter, the estimate of the unknown speckle CM with persymmetric structure is persymmetric fixed point (PFP) CM . We obtain the fully adaptive persymmetric GLRT in the compound Gaussian clutter plus deterministic interference (PS-GLRT-CG-I) by inserting (6), (7), (9) and (10), and into (5):
where , , , , , , , , , .
3.2. Adaptive Two-Step Persymmetric Rao Test
Different from [21], we treat the complex-valued variable in the Rao test and Wald test as a single one to avoid the time-consuming problem of dividing it into real and imaginary parts. Since the interference can be nulled more effectively by setting the relative parameter to contain both the signal and interference coordinates [11], we set the relative parameter in the Rao test and Wald test as .
The Rao test for complex-valued signals based on the primary data with known speckle CM is
where is a -dimensional vector; , is a -dimensional vector. is the MLE of under . is Fisher information matrix, which can be partitioned as four block matrices , , , and .
After some calculation, we obtain the following results
The estimates of the unknown parameters are also needed. We obtain the ML estimate of by setting the derivative of (4) with respect to to zero.
Since the equation holds under , the ML estimate of is .
In the second step, we estimate the texture and speckle CM. The MAP estimate of the texture is
where , , . By substituting (13)–(19) and PFP CM into (12) and ignoring the constants, the two-step persymmetric Rao test in compound Gaussian clutter plus deterministic interference (PS-Rao-CG-I) is
where .
3.3. Adaptive Two-Step Persymmetric Wald Test
In this part, two-step design procedure is utilized to derive the Wald test. We first derive the Wald test with known , and then replace them with their estimates. The Wald test for complex-valued signals is
where is the true value of under , denotes the MLE of under , and denotes the MLE of under .
Substituting (17) into (21), we obtain the Wald test with known , :
In the second step, we estimate , under . We take the derivative of (4) with respect to and set the result to zero to obtain the MLE of under .
We substitute to (23) and obtain the MLE of under according to the partitioned matrix inversion lemma [31]
where . The MAP estimate of under can be calculated as
where , .
Plugging (23)–(25) and the PFP CM into (22), we obtain the adaptive two-step persymmetric Wald test in compound Gaussian clutter plus deterministic interference (PS-Wald-CG-I):
where , , , .
All the three proposed detectors have been proven to have the CFAR property. We give the detailed proof in the Appendix A.
4. Performance Assessment
The detection performance of the proposed detectors is assessed by utilizing Monte Carlo simulations in this section. We resort to independent trials to compute the thresholds and detection probabilities. The element of speckle CM is . Unless otherwise specified, we set , , , , , , , and . Other parameters of the simulated data are shown in Table 2. The interference to clutter ratio (ICR) and signal to clutter ratio (SCR) are defined as and .
Table 2.
Parameters of the simulated data.
4.1. Simulated Data Results
Figure 1 shows false-alarm probabilities of the proposed persymmetric detectors (PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I) versus correlation coefficients when . The detection threshold is obtained by setting . The figure shows that probabilities of false alarm remain almost the same under different correlation coefficients. Thus, both theoretical analysis and simulation results verify that the PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I are CFAR detectors.
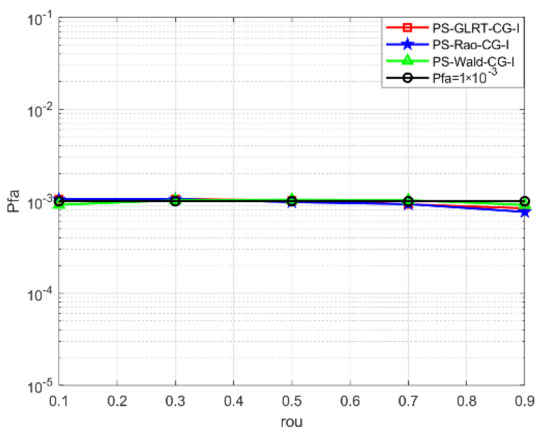
Figure 1.
False-alarm probabilities versus correlation coefficients for .
In Figure 2a,b, we present probabilities of detection of the proposed PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I as a function of SCR for different . For comparison, we give the performance of the PS-GLRT-I [19] proposed in partially homogeneous clutter plus subspace interference. The performance of the PS-GLRT-CG, PS-Rao-CG, PS-Wald-CG [21], and the GLRT-ML-CG [29], which are proposed in the compound Gaussian clutter but without considering the interference, is also given. Moreover, the performance of the persymmetric matched filter (PMF), which is derived with known covariance matrix , is given just as a benchmark since is unknown in real applications [32,33].
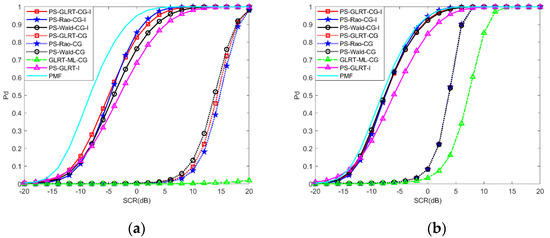
Figure 2.
Detection performance of the detectors: (a) ; (b) .
Figure 2a,b indicate that the proposed PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I achieve better detection performance than the conventional detectors. The proposed detectors achieve about 14 dB and 6 dB performance gains compared to the PS-GLRT-CG, PS-Rao-CG, and PS-Wald-CG for and , respectively. The proposed detectors achieve about 2 dB performance gain at compared to the PS-GLRT-I. When , the performance of the proposed detectors approaches that of the PMF. This can be attributed to the reason that the proposed detectors exploit both the persymmetric structure of the speckle CM and prior distribution of the texture, while the PS-GLRT-I exploits persymmetric property of the speckle CM but assumes that the texture is a constant. Meanwhile, the PS-GLRT-CG, PS-Rao-CG, PS-Wald-CG, and GLRT-ML-CG do not consider the presence of the interference.
In Figure 3a,b, the receiver operating characteristic (ROC) of the detectors for , and are displayed. The figures indicate that the proposed detectors are superior to conventional methods in a wide range of .
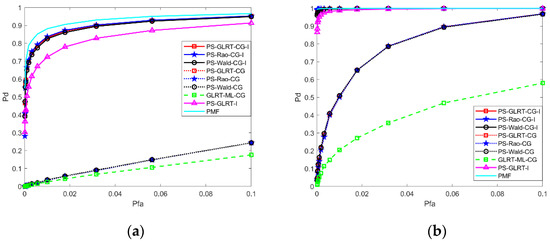
Figure 3.
ROC of the detectors for : (a) ; (b) .
The detection performance of the PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I under different ICRs is analyzed in Figure 4. We can see that the detection probabilities of the three proposed detectors remain almost the same under different ICRs. The detection performance does not vary with ICR.
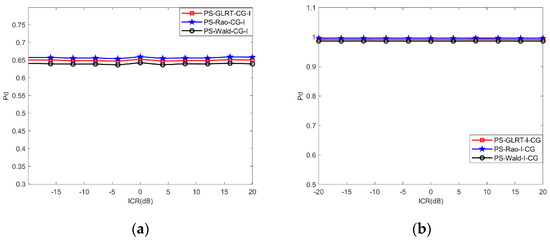
Figure 4.
Detection performance of the detectors for : (a) ; (b) .
To see the detection performance of the PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I in the mismatched signal cases, we define mismatch angle as , where and denote the nominal and actual target subspaces. The smaller , the more serious the mismatch between the nominal target subspaces and actual one. The SCR becomes . It can be seen from Figure 5 that when SCR is small, PS-Rao-CG-I is the most selective when the signal mismatch occurs. As SCR increases, the PS-Wald-CG-I is the most sensitive to mismatched signals, while the PS-Rao-CG-I is more robust than PS-Rao-CG-I and PS-GLRT-CG-I.
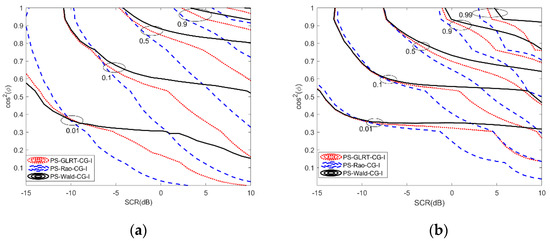
Figure 5.
Contours of const for the proposed detectors: (a) ; (b) .
4.2. Real Data Results
For purpose of further demonstrating the effectiveness of the proposed PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I, real sea clutter data measured with IPIX radar in 1998 [34] are used to test the performance of the detectors. The selected data are dataset 85 in VV polarization. Table 3 shows the main parameters of the real sea data.
Table 3.
Parameters of the real data.
The simulated target signal and interference signal are added in the 16th range bin wherein the data are chosen as the primary data. The training data are chosen from the data in range bins adjacent to the primary data. Figure 6a gives the amplitudes of the chosen primary data. The amplitude PDF of the real data is analyzed in Figure 6b. The results show that the real sea clutter can be fitted well with the inverse Gaussian distribution.
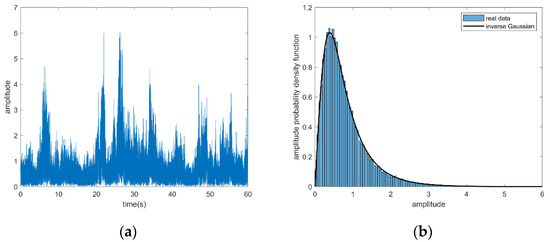
Figure 6.
Clutter amplitude and amplitude probability density function for VV polarizations, 16th range cell, dataset 85: (a) clutter amplitude; (b) amplitude probability density function.
Since the amount of real data is limited, we set . The detection probability versus SCR for and various is displayed in Figure 7. The figure shows that the proposed detectors achieve more than 2 dB detection performance gain compared to the PS-GLRT-I and more than 10 dB detection performance gain compared to the PS-GLRT-CG, PS-Rao-CG, and PS-Wald-CG. Thus, both the real data and simulated data results demonstrate that compared with conventional detectors, the proposed PS-GLRT-CG-I, PS-Rao-CG-I, and PS-Wald-CG-I can achieve better detection performance in deterministic interference plus compound Gaussian sea clutter environment.
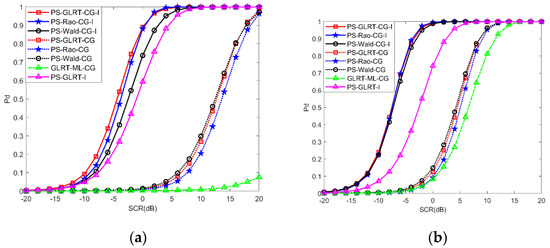
Figure 7.
Detection performance of the detectors: (a) ; (b) .
5. Conclusions
The problem of adaptive subspace signal detection in compound Gaussian clutter plus deterministic interference were herein considered. The texture is random and follows the inverse Gaussian distribution. The target signal and interference occupy two independent known subspaces. Three new CFAR detectors, i.e., PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I, were proposed by utilizing the persymmetric structure of the clutter CM. Real sea clutter data and simulated data results have demonstrated that the proposed detectors can effectively suppress interference and exhibit good detection performance in complex environments. Since the PS-Rao-CG-I, PS-Wald-CG-I, and PS-GLRT-CG-I are proposed when the subspaces occupied by the target signal and interference are independent, future research may focus on the situation when the two subspaces overlap each other. Moreover, it would be interesting to investigate and design detectors based on other design criteria, such as gradient and Durbin tests.
Author Contributions
The research presented in this manuscript was accomplished in collaboration with all of the authors. Conceptualization, Z.W. and J.L.; methodology, Z.W. and J.L.; software, Z.W. and Y.L.; validation, Y.L. and H.C.; formal analysis, H.C.; investigation, Z.W. and Y.L.; resources, Z.W.; data curation, Z.W.; writing—original draft preparation, Z.W.; writing—review and editing, J.L. and H.C.; visualization, Y.L.; supervision, M.P.; project administration, M.P. and J.L.; funding acquisition, J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China, grant number 61871469 and 61771442, Youth Innovation Promotion Association CAS, grant number CX2100060053, Key Research Program of the Frontier Sciences, CAS, grant number QYZDY-SSW-JSC035.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the anonymous reviewers and the associate editor for their valuable comments.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
From the proposed PS-Rao-CG-I (20), PS-Wald-CG-I (26), and PS-GLRT-CG-I (11), we can see that the test statistics are functions of , , , and . We rewrite the numerator of the PS-Rao-CG-I as
where . We define , , , and . Using the matrix , we construct an dimensional unitary matrix , which satisfies , , , and . Let , , and
. Then, the expression becomes
where . It can be verified that ; . Meanwhile, as is shown in [28], is the fixed point estimator of the identity matrix. Moreover, the texture is independent of the speckle CM. Thus, is independent of .
According to the above derivation, we simplify as
It is not difficult to find that is independent of . In a similar way, we can verify that and are independent of .
The numerator of the PS-Wald-CG-I (26) can be recast as
where , is a unitary matrix that we construct by using , , , , , , , , , , and .
Since , and is independent of hold, is independent of . According to the above proof results (27)–(30), it is concluded that the three new persymmetric detectors exhibit the CFAR property with respect to the speckle CM .
References
- Rong, Y.; Aubry, A.; De Maio, A.; Tang, M. Adaptive radar detection in Gaussian interference using clutter-free training data. IEEE Trans. Signal Process. 2022, 70, 978–993. [Google Scholar] [CrossRef]
- Bidon, S.; Besson, O.; Tourneret, J. A Bayesian approach to adaptive detection in nonhomogeneous environments. IEEE Trans. Signal Process. 2008, 56, 205–217. [Google Scholar] [CrossRef] [Green Version]
- Kelly, E.J. An adaptive detection algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, 22, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Li, H.; Himed, B. Adaptive subspace tests for multichannel signal detection in auto-regressive disturbance. IEEE Trans. Signal Process. 2018, 66, 5577–5587. [Google Scholar] [CrossRef]
- Park, H.-R.; Li, J.; Wang, H. Polarization-space-time domain generalized likelihood ratio detection of radar targets. Signal Process. 1995, 41, 153–164. [Google Scholar] [CrossRef]
- Kraut, S.; Scharf, L.L. Adaptive subspace detectors. IEEE Trans. Signal Process. 2001, 49, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Liu, W.; Chen, B.; Liu, H.; Li, H.; Hao, C. Modified Rao test for multichannel adaptive signal detection. IEEE Trans. Signal Process. 2016, 64, 714–725. [Google Scholar] [CrossRef]
- Wang, Z.; Li, M.; Chen, H.; Zuo, L.; Zhang, P.; Wu, Y. Adaptive detection of a subspace signal in signal-dependent interference. IEEE Trans. Signal Process. 2017, 65, 4812–4820. [Google Scholar] [CrossRef]
- Gini, F.; Farina, A. Vector subspace detection in compound-Gaussian clutter. Part I: Survey and new results. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1295–1311. [Google Scholar] [CrossRef]
- Wang, Z. Modified Rao test for distributed target detection in interference and noise. Signal Process. 2020, 172. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Li, H.; Himed, B. Detection with target-induced subspace interference. IEEE Signal Process. Lett. 2012, 19, 403–406. [Google Scholar] [CrossRef]
- Bandiera, F.; Ricci, G. Adaptive detection and interference rejection of multiple point-like radar targets. IEEE Trans. Signal Process. 2006, 54, 4510–4518. [Google Scholar] [CrossRef]
- Besson, O. Detection in the presence of surprise or undernulled interference. IEEE Signal Process. Lett. 2007, 14, 352–354. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Liu, W.; Liu, J.; Tang, P.; Hao, C. Adaptive subspace detection based on gradient test for orthogonal interference. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: Piscatway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Orlando, D. On the statistical invariance for adaptive radar detection in partially homogeneous disturbance plus structured interference. IEEE Trans. Signal Process. 2017, 65, 1222–1234. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Li, H.; Du, Q.; Wang, Y.-L. Multichannel signal detection based on Wald test in subspace interference and Gaussian noise. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1370–1381. [Google Scholar] [CrossRef]
- Bandiera, F.; De Maio, A.; Greco, A.S.; Ricci, G. Adaptive radar detection of distributed targets in homogeneous and partially homogeneous noise plus subspace interference. IEEE Trans. Signal Process. 2007, 55, 1223–1237. [Google Scholar] [CrossRef]
- Mao, L.; Gao, Y.; Yan, S.; Xu, L. Persymmetric subspace detection in structured interference and non-homogeneous disturbance. IEEE Signal Process. Lett. 2019, 26, 928–932. [Google Scholar] [CrossRef]
- Gao, Y.; Liao, G.; Liu, W. High-resolution radar detection in interference and nonhomogeneous noise. IEEE Signal Process. Lett. 2016, 23, 1359–1363. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Liu, J. Persymmetric detection of radar targets in nonhomogeneous and non-Gaussian sea clutter. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–9. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Wang, Z.; Xu, W.; Sun, X. A novel post-doppler parametric adaptive matched filter for airborne multichannel Radar. Remote Sens. 2020, 12, 4017. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, Y.; Wu, H.; Wang, H. Heterogeneous clutter suppression for airborne radar STAP based on matrix manifolds. Remote Sens. 2021, 13, 3195. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Ovarlez, J.; Forster, P.; Larzabal, P. Covariance structure maximum-likelihood estimates in compound Gaussian noise: Existence and algorithm analysis. IEEE Trans. Signal Process. 2008, 56, 34–48. [Google Scholar] [CrossRef] [Green Version]
- Gini, F.; Montanari, M.; Verrazzani, L. Estimation of chirp radar signals in compound-Gaussian clutter: A cyclostationary approach. IEEE Trans. Signal Process. 2000, 48, 1029–1039. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Orlando, D.; Pallotta, L. On the maximal invariant statistic for adaptive radar detection in partially homogeneous disturbance with persymmetric covariance. IEEE Signal Process. Lett. 2016, 23, 1830–1834. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Tang, B.; Zheng, J.; Xu, S. Distributed target detection exploiting persymmetry in Gaussian clutter. IEEE Trans. Signal Process. 2019, 67, 1022–1033. [Google Scholar] [CrossRef]
- Pailloux, G.; Forster, P.; Ovarlez, J.; Pascal, F. Persymmetric adaptive radar detectors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2376–2390. [Google Scholar] [CrossRef]
- Shuai, X.; Kong, L.; Yang, J. Performance analysis of GLRT-based adaptive detector for distributed targets in compound-Gaussian clutter. Signal Process. 2010, 90, 16–23. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Li, M. Adaptive detection of distributed target in the presence of signal mismatch in compound Gaussian clutter. Digit. Signal Process. 2020, 102, 102755. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory, Part IV: Optimum Array Processing; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Sangston, K.J.; Gini, F.; Greco, M.V.; Farina, A. Structures for radar detection in compound Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 445–458. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Shui, P. Near-optimum coherent CFAR detection of radar targets in compound-Gaussian clutter with inverse Gaussian texture. Signal Process. 2020, 166, 107236. [Google Scholar] [CrossRef]
- The McMaster IPIX Radar Sea Clutter Database. Available online: http://soma.ece.mcmaster.ca/ipix/ (accessed on 1 July 2001).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).