

A Retrospective Analysis of National-Scale Agricultural Development in Saudi Arabia from 1990 to 2021


Abstract
1. Introduction
2. Study Site and Data Description
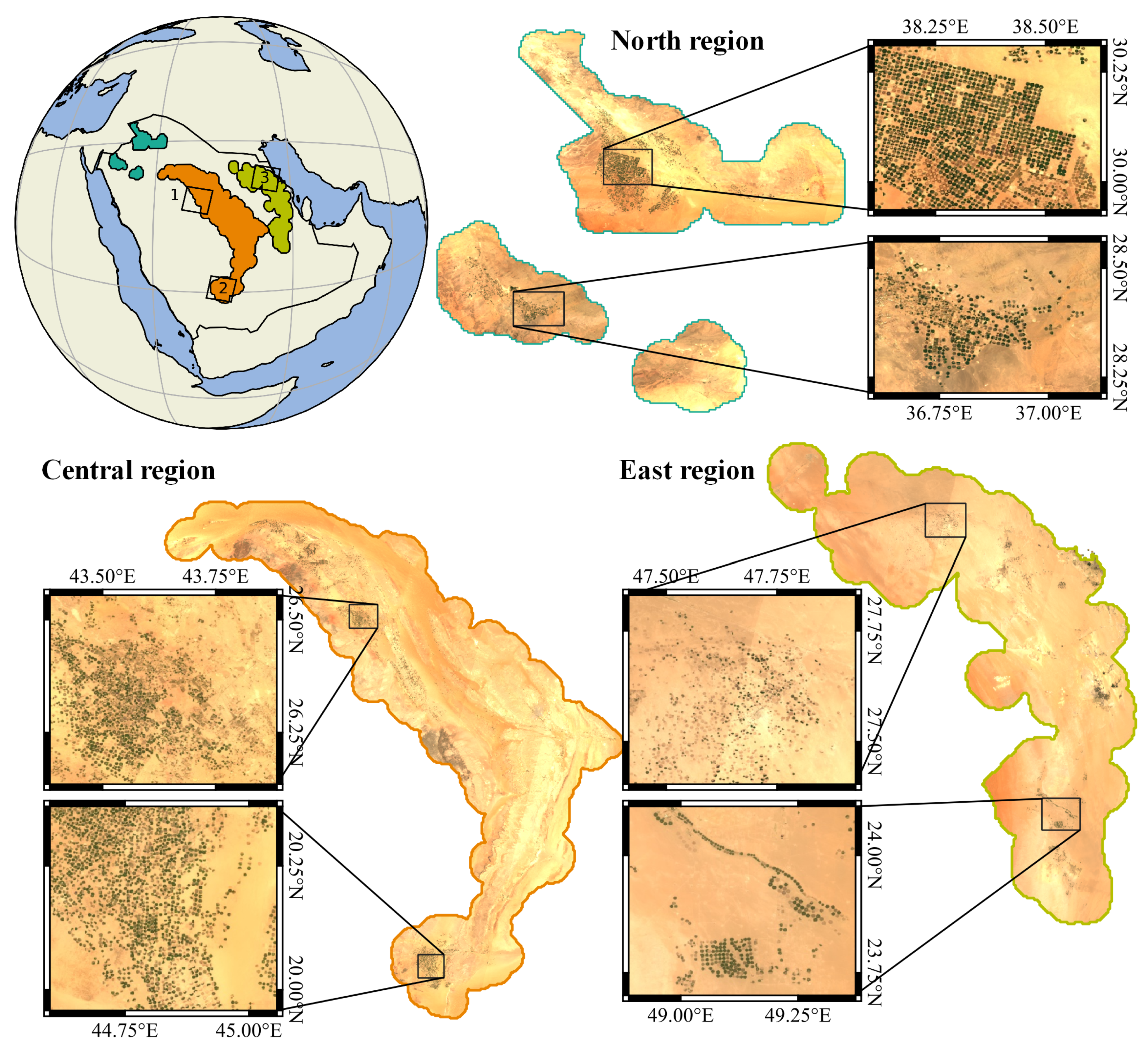
2.1. Study Site: The Main Agricultural Regions in Saudi Arabia
2.2. Landsat Data
2.3. Ground-Truth Data
3. Field Delineation Framework
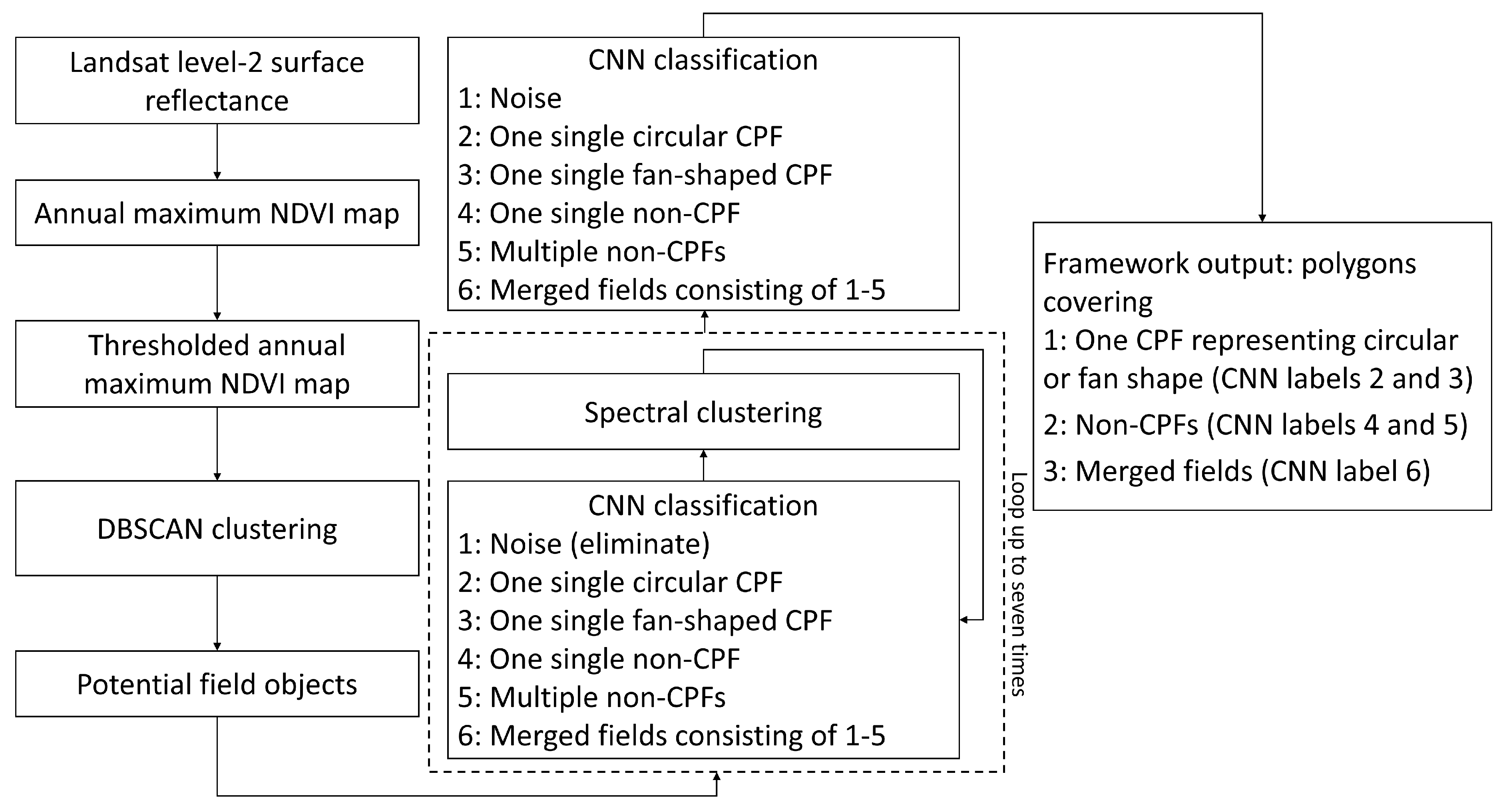
3.1. Framework Description
3.2. Evaluation Metrics
4. Results
4.1. Evaluation of the Hybrid Machine Learning Framework Using Three Landsat Tiles
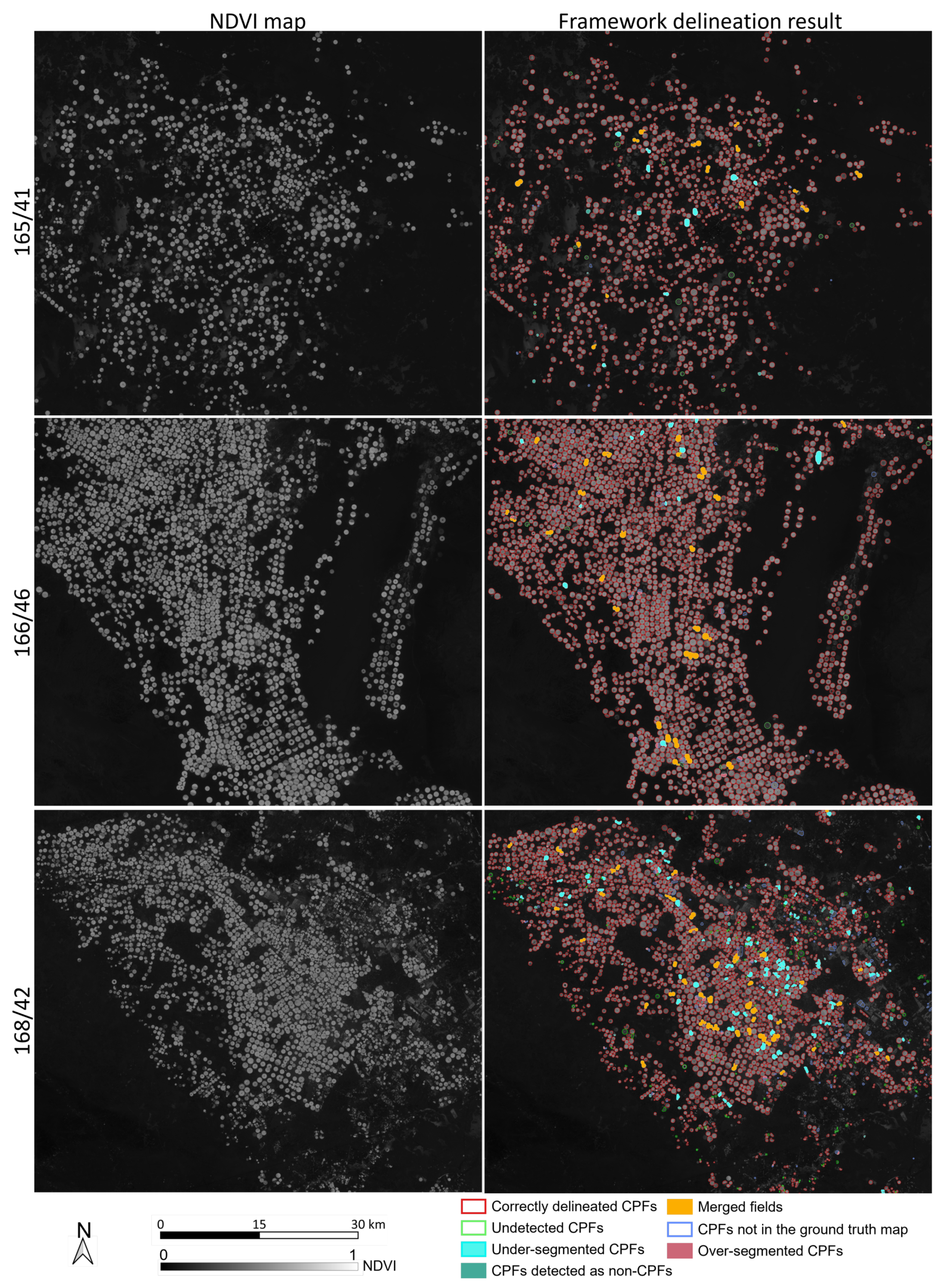
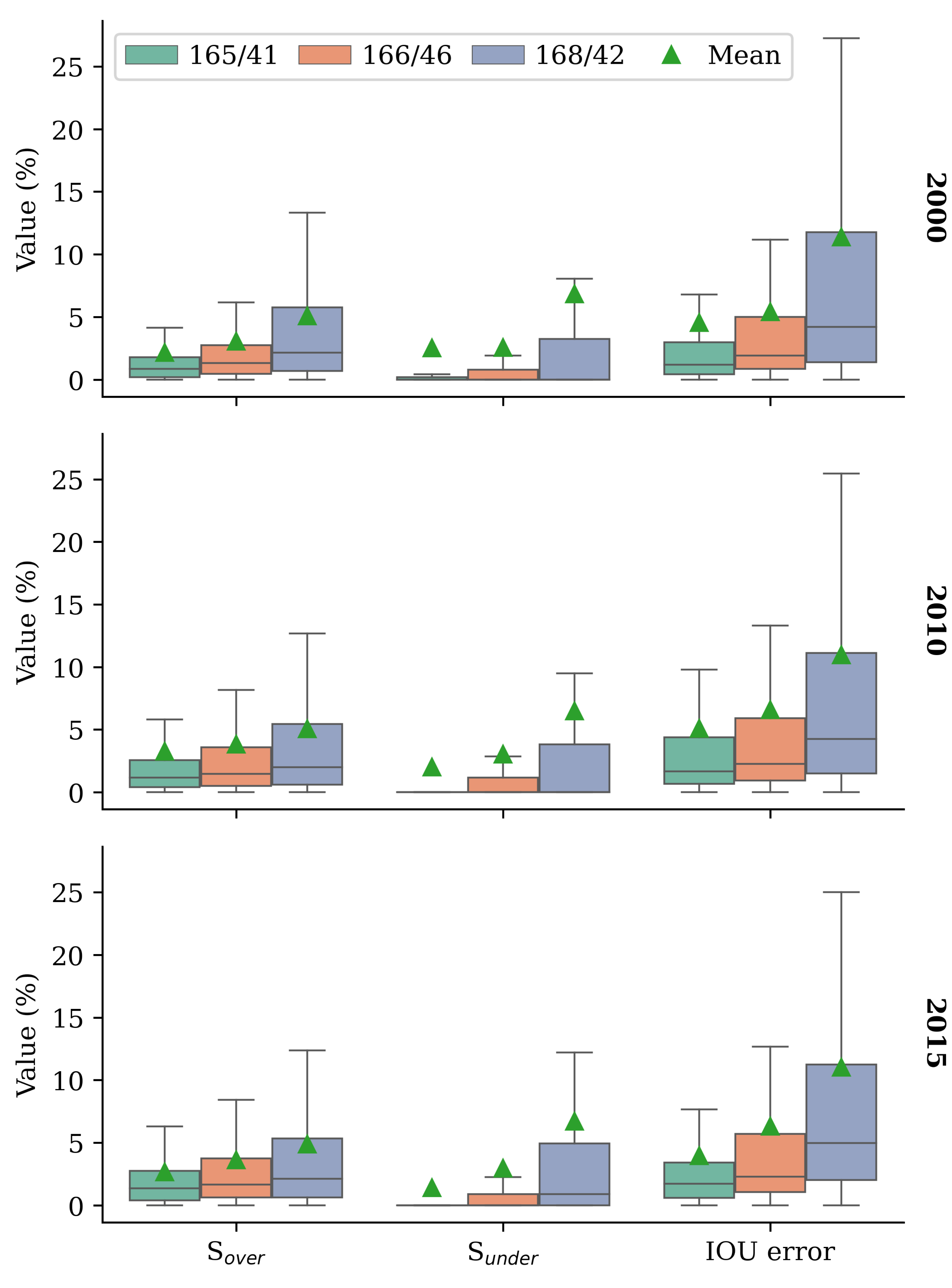
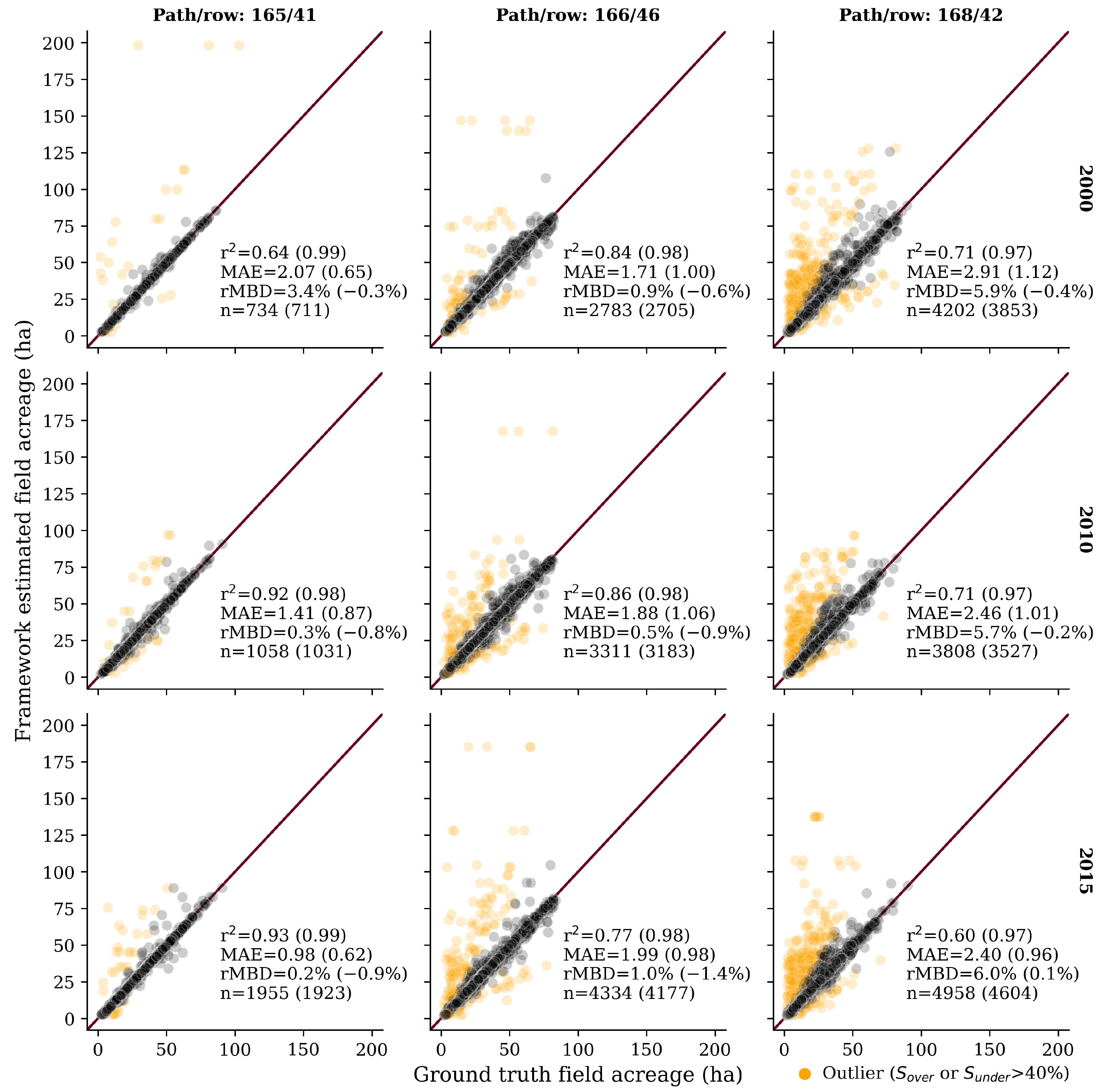
4.1.1. Accuracy of the Field Delineation Framework
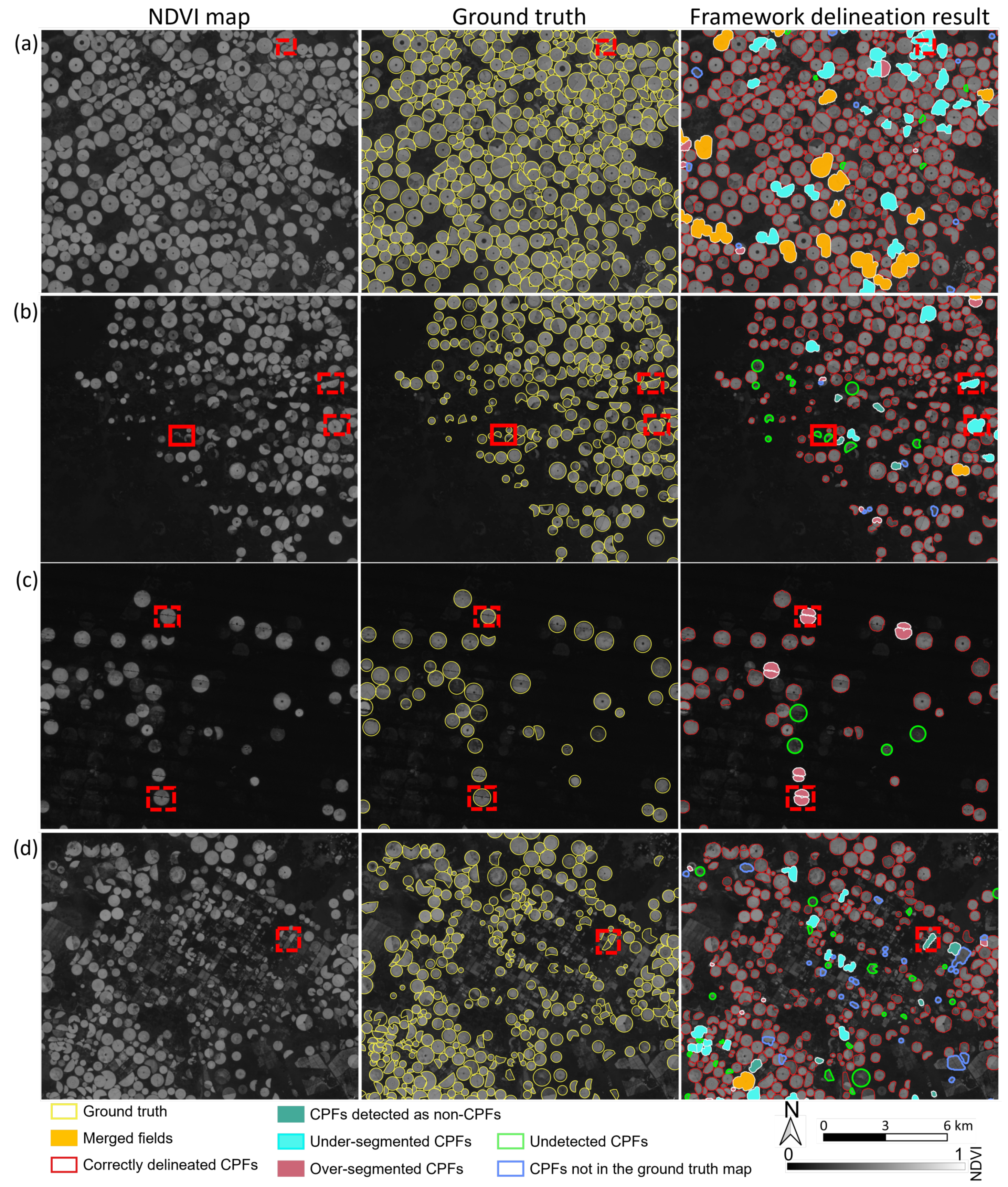
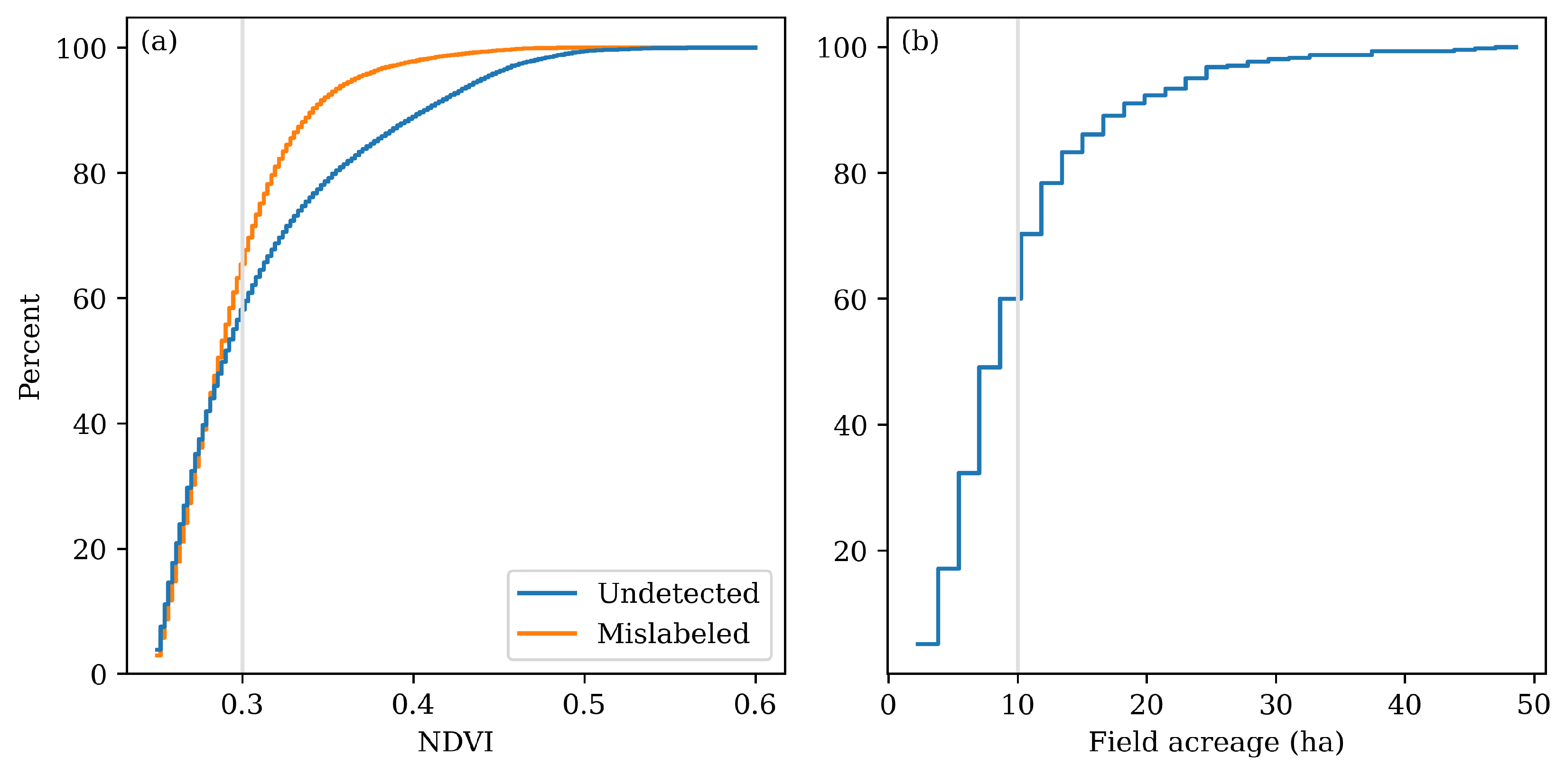
4.1.2. Error Interpretations
4.2. Retrospective Center-Pivot Field Dynamics on a National Scale in Saudi Arabia since 1990
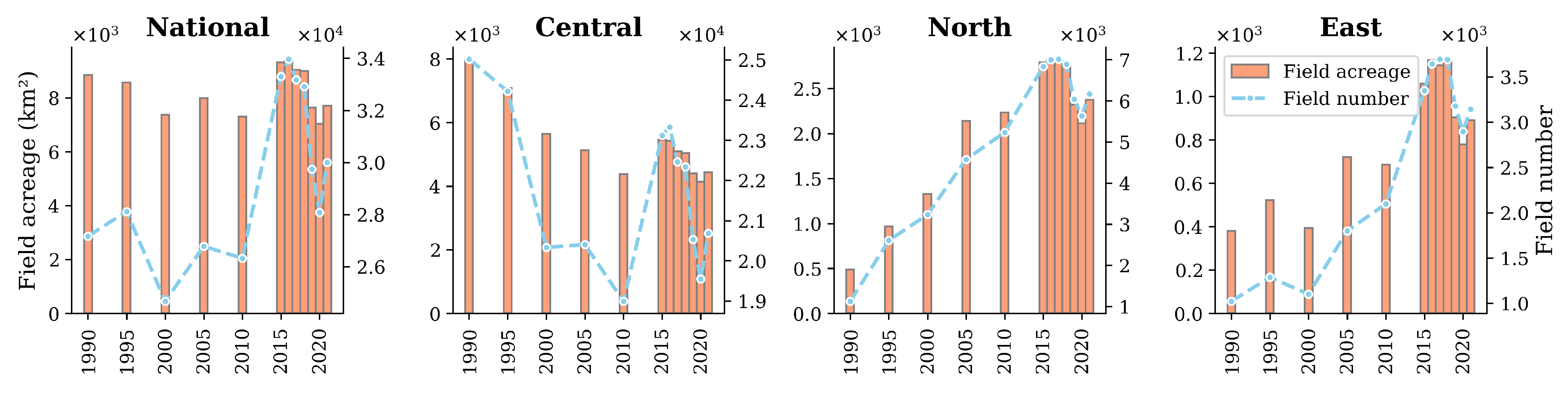
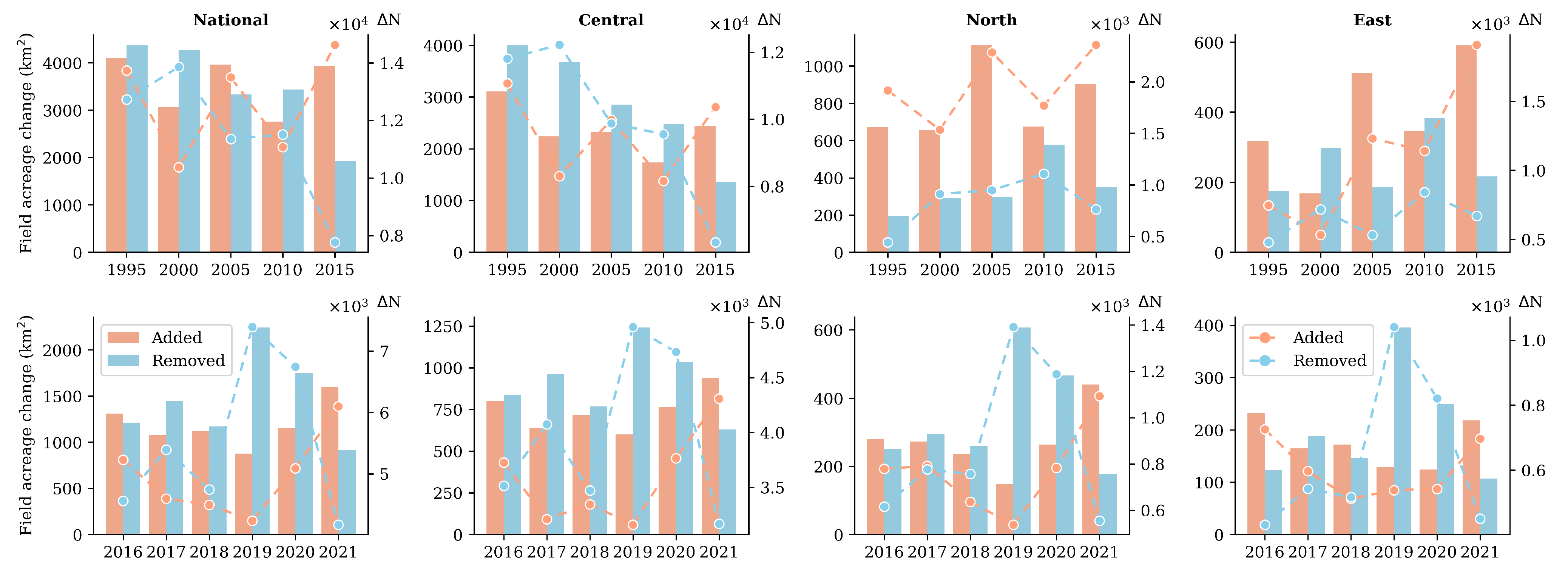
4.2.1. Multiple-Temporal Dynamics of Field Number and Acreage
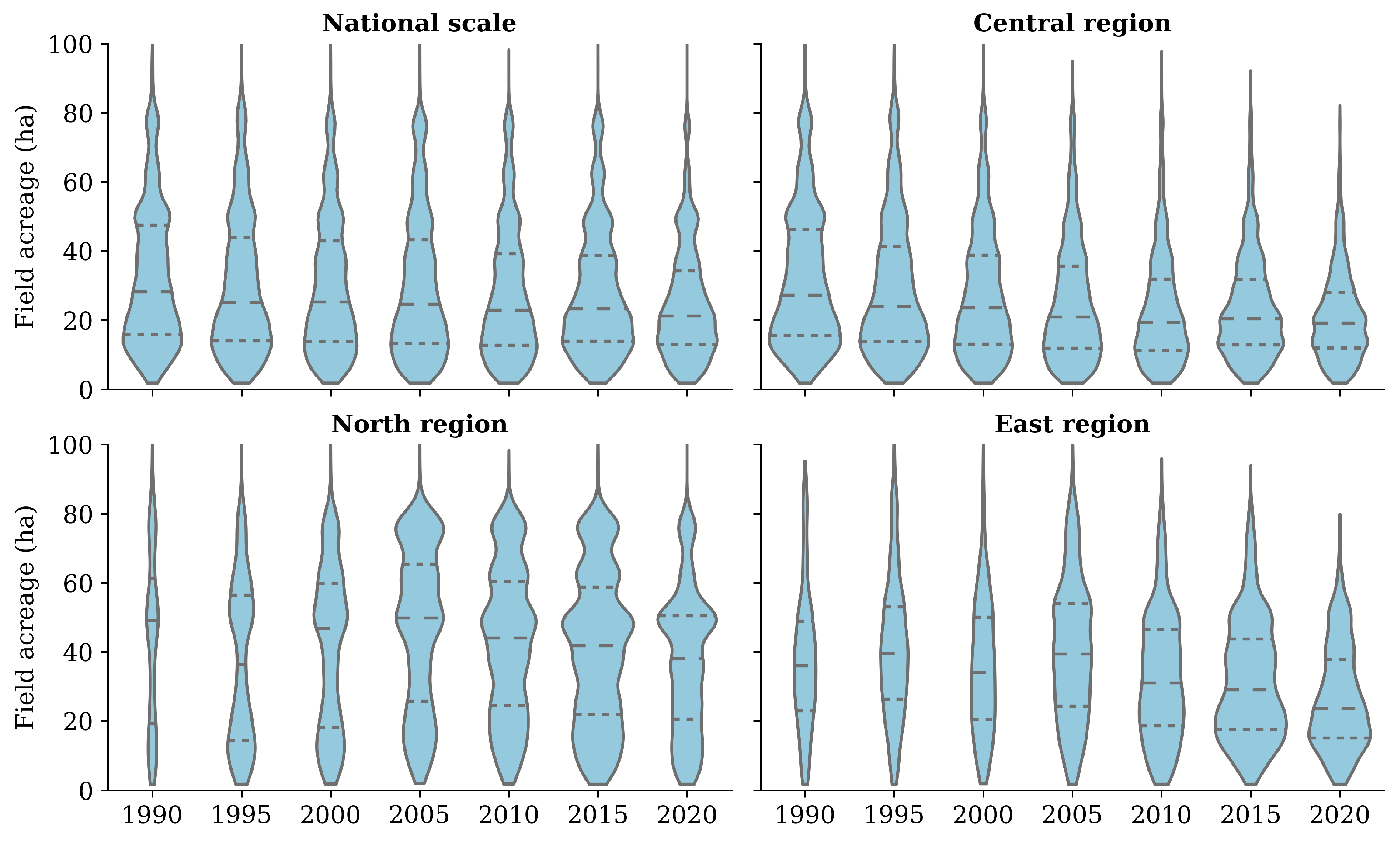
4.2.2. Multiple-Temporal Dynamics of Field Size Distribution
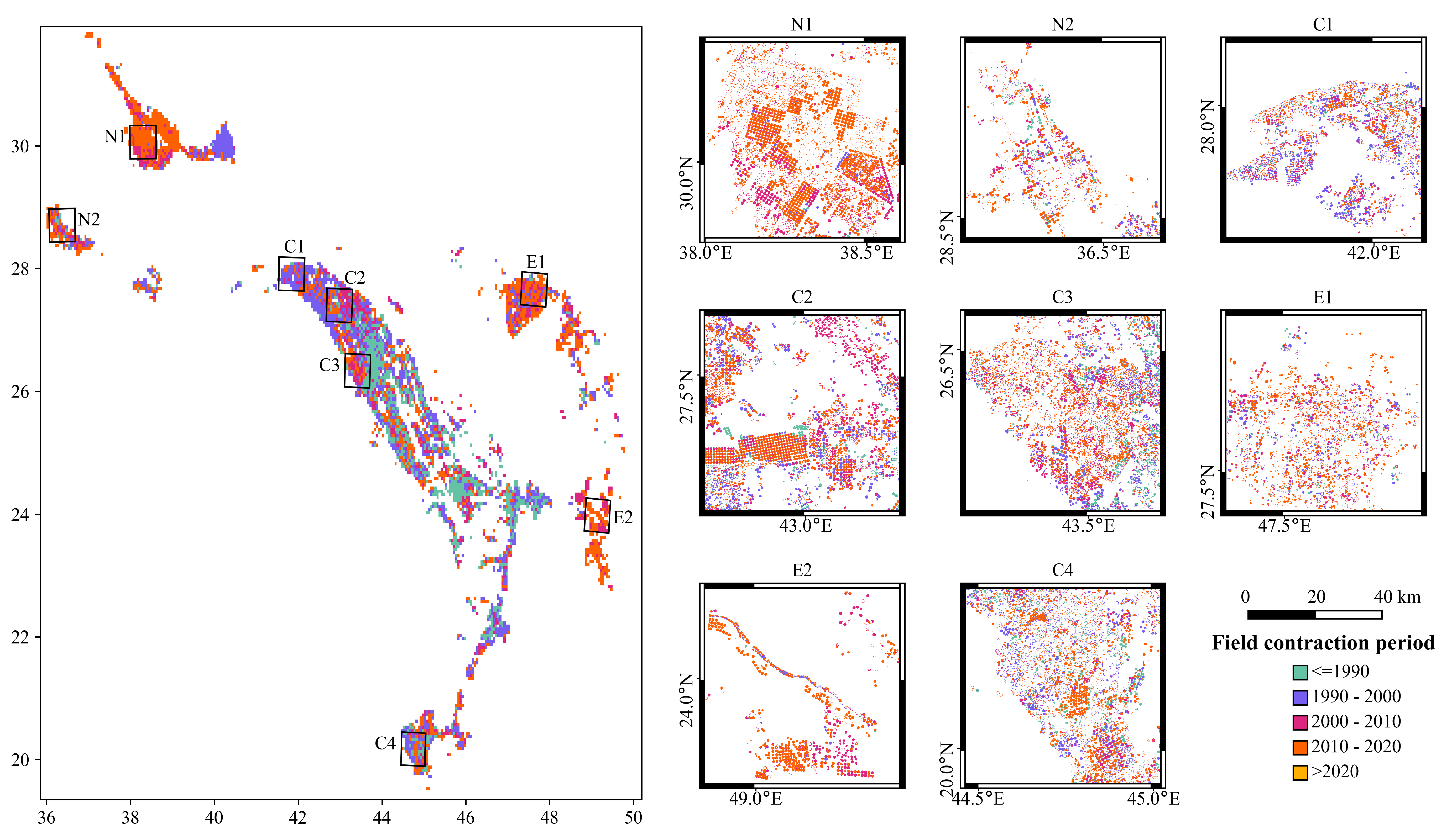
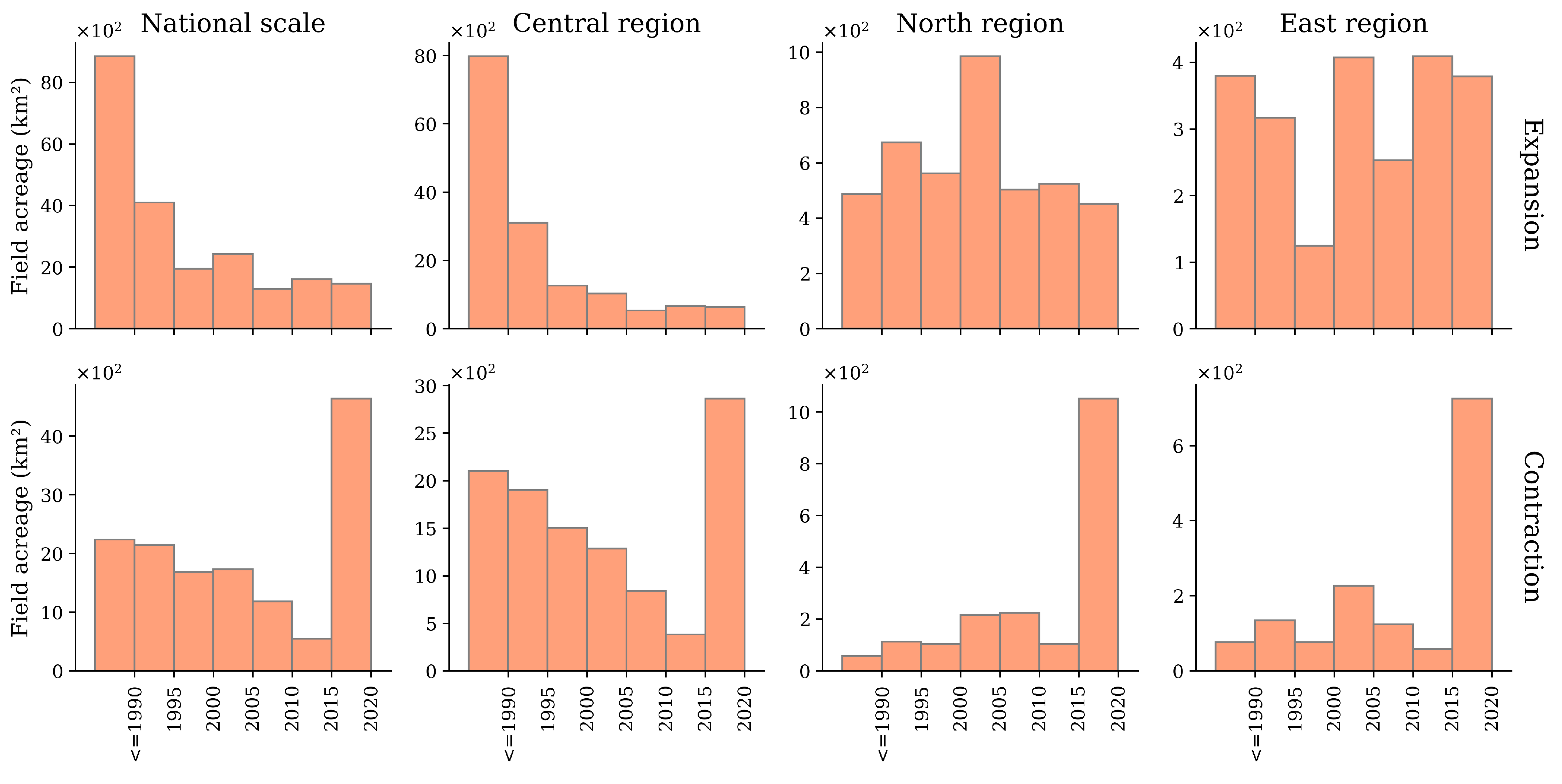
4.2.3. Field Expansion and Contraction Dynamics
5. Discussion
5.1. Intercomparison with Other Crop Mapping Products
5.2. Socio-Political Drivers of Center-Pivot Field Dynamics
5.2.1. Agricultural Initialization Stage before 1990
5.2.2. Agricultural Contraction Stage from 1990 to 2010
5.2.3. Agricultural Expansion Stage from 2010 to 2016
5.2.4. Agricultural Contraction Stage since 2016
5.3. Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A


References
- Wada, Y.; Wisser, D.; Eisner, S.; Flörke, M.; Gerten, D.; Haddeland, I.; Hanasaki, N.; Masaki, Y.; Portmann, F.T.; Stacke, T.; et al. Multimodel projections and uncertainties of irrigation water demand under climate change. Geophys. Res. Lett. 2013, 40, 4626–4632. [Google Scholar] [CrossRef]
- López Valencia, O.M.; Johansen, K.; Aragón Solorio, B.J.L.; Li, T.; Houborg, R.; Malbeteau, Y.; AlMashharawi, S.; Altaf, M.U.; Fallatah, E.M.; Dasari, H.P.; et al. Mapping groundwater abstractions from irrigated agriculture: Big data, inverse modeling, and a satellite–model fusion approach. Hydrol. Earth Syst. Sci. 2020, 24, 5251–5277. [Google Scholar] [CrossRef]
- GebreEgziabher, M.; Jasechko, S.; Perrone, D. Widespread and increased drilling of wells into fossil aquifers in the USA. Nat. Commun. 2022, 13, 2129. [Google Scholar] [CrossRef]
- Elhadj, E. Camels don’t fly, deserts don’t bloom: An assessment of Saudi Arabia’s experiment in desert agriculture. Occasional Paper. 2004, 49. [Google Scholar]
- Ministry of Economy and Planning. Eighth Development Plan 2005–2009; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 2005.
- Ministry of Economy and Planning. Fourth Development Plan 1985–1990; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 1985.
- Ministry of Economy and Planning. Fifth Development Plan 1990–1995; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 1990.
- Ministry of Economy and Planning. Sixth Development Plan 1995–2000; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 1995.
- Kim, A.; van der Beek, H. A holistic assessment of the water-for-agriculture dilemma in the Kingdom of Saudi Arabia. CIRS Occas. Pap. 2018. [Google Scholar]
- MEWA. National Water Strategy. Available online: https://www.mewa.gov.sa/en/Ministry/Agencies/TheWaterAgency/Topics/Pages/Strategy.aspx (accessed on 3 October 2022).
- Ministry of Economy and Planning. Ninth Development Plan 2010–2014; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 2010.
- Kingdom of Saudi Arabia. Vision 2030. Available online: https://www.vision2030.gov.sa/ (accessed on 3 October 2022).
- FAO. Country Profile—Saudi Arabia; FAO: Rome, Italy, 2008. [Google Scholar]
- World Bank. A Water Sector Assessment Report on Countries of the Cooperation Council of the Arab State of the Gulf; Report No. 32539-MNA; World Bank: Washington, DC, USA, 2005. [Google Scholar]
- Aragon, B.; Houborg, R.; Tu, K.; Fisher, J.B.; McCabe, M. CubeSats Enable High Spatiotemporal Retrievals of Crop-Water Use for Precision Agriculture. Remote Sens. 2018, 10, 1867. [Google Scholar] [CrossRef]
- De Albuquerque, A.O.; de Carvalho, O.L.F.; e Silva, C.R.; Luiz, A.S.; Pablo, P.; Gomes, R.A.T.; Guimarães, R.F.; de Carvalho Júnior, O.A. Dealing With Clouds and Seasonal Changes for Center Pivot Irrigation Systems Detection Using Instance Segmentation in Sentinel-2 Time Series. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8447–8457. [Google Scholar] [CrossRef]
- Carlson, M.P. The Nebraska Center-Pivot Inventory: An example of operational satellite remote sensing on a long-term basis. Photogramm. Eng. Remote Sens. 1989, 55, 587–590. [Google Scholar]
- Giri, C.; Pengra, B.; Long, J.; Loveland, T.R. Next generation of global land cover characterization, mapping, and monitoring. Int. J. Appl. Earth Obs. Geoinf. 2013, 25, 30–37. [Google Scholar] [CrossRef]
- Tchuenté, A.T.K.; Roujean, J.L.; De Jong, S.M. Comparison and relative quality assessment of the GLC2000, GLOBCOVER, MODIS and ECOCLIMAP land cover data sets at the African continental scale. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 207–219. [Google Scholar] [CrossRef]
- Ferreira, E.; Toledo, J.H.d.; Dantas, A.A.; Pereira, R.M. Cadastral maps of irrigated areas by center pivots in the State of Minas Gerais, using CBERS-2B/CCD satellite imaging. Eng. Agríc. 2011, 31, 771–780. [Google Scholar] [CrossRef]
- Litts, T.; Russell, H.; Thomas, A.; Welch, R. Mapping Irrigated Lands in the ACF River Basin; Georgia Institute of Technology: Atlanta, GA, USA, 2001. [Google Scholar]
- Seth, N. Analyzing the Increase in Center Pivot Irrigation Systems in Custer County, Nebraska USA from 2003 to 2010. Pap. Resour. Anal. 2015, 17, 15. [Google Scholar]
- Graesser, J.; Ramankutty, N. Detection of cropland field parcels from Landsat imagery. Remote Sens. Environ. 2017, 201, 165–180. [Google Scholar] [CrossRef]
- Watkins, B.; Van Niekerk, A. A comparison of object-based image analysis approaches for field boundary delineation using multi-temporal Sentinel-2 imagery. Comput. Electron. Agric. 2019, 158, 294–302. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P. Automated crop field extraction from multi-temporal Web Enabled Landsat Data. Remote Sens. Environ. 2014, 144, 42–64. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P. Conterminous United States crop field size quantification from multi-temporal Landsat data. Remote Sens. Environ. 2016, 172, 67–86. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Baatz, M. Multi Resolution Segmentation: An Optimum Approach for High Quality Multi Scale Image Segmentation; Beutrage zum AGIT-Symposium: Salzburg, Austria, 2000; pp. 12–23. [Google Scholar]
- Bleau, A.; Leon, L.J. Watershed-based segmentation and region merging. Comput. Vis. Image Underst. 2000, 77, 317–370. [Google Scholar] [CrossRef]
- Koc-San, D.; Selim, S.; Aslan, N.; San, B.T. Automatic citrus tree extraction from UAV images and digital surface models using circular Hough transform. Comput. Electron. Agric. 2018, 150, 289–301. [Google Scholar] [CrossRef]
- Rodrigues, M.; Körting, T.; de Queiroz, G.; Sales, C.; da Silva, L. Detecting center pivots in Matopiba using Hough transform and web time series service. In Proceedings of the 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–26 March 2020; pp. 189–194. [Google Scholar]
- Garcia-Pedrero, A.; Gonzalo-Martin, C.; Lillo-Saavedra, M. A machine learning approach for agricultural parcel delineation through agglomerative segmentation. Int. J. Remote Sens. 2017, 38, 1809–1819. [Google Scholar] [CrossRef]
- Lebourgeois, V.; Dupuy, S.; Vintrou, E.; Ameline, M.; Butler, S.; Bégué, A. A combined random forest and OBIA classification scheme for mapping smallholder agriculture at different nomenclature levels using multisource data (simulated Sentinel-2 time series, VHRS and DEM). Remote Sens. 2017, 9, 259. [Google Scholar] [CrossRef]
- Long, J.; Li, M.; Wang, X.; Stein, A. Delineation of agricultural fields using multi-task BsiNet from high-resolution satellite images. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102871. [Google Scholar] [CrossRef]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Zhang, C.; Yue, P.; Di, L.; Wu, Z. Automatic identification of center pivot irrigation systems from landsat images using convolutional neural networks. Agriculture 2018, 8, 147. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. Handb. Brain Theory Neural Netw. 1995, 3361, 1995. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- De Albuquerque, A.O.; de Carvalho Júnior, O.A.; Carvalho, O.L.F.d.; de Bem, P.P.; Ferreira, P.H.G.; de Moura, R.d.S.; Silva, C.R.; Trancoso Gomes, R.A.; Fontes Guimarães, R. Deep semantic segmentation of center pivot irrigation systems from remotely sensed data. Remote Sens. 2020, 12, 2159. [Google Scholar] [CrossRef]
- Graf, L.; Bach, H.; Tiede, D. Semantic Segmentation of Sentinel-2 Imagery for Mapping Irrigation Center Pivots. Remote Sens. 2020, 12, 3937. [Google Scholar] [CrossRef]
- Saraiva, M.; Protas, E.; Salgado, M.; Souza, C., Jr. Automatic mapping of center pivot irrigation systems from satellite images using deep learning. Remote Sens. 2020, 12, 558. [Google Scholar] [CrossRef]
- De Albuquerque, A.O.; de Carvalho, O.L.F.; e Silva, C.R.; de Bem, P.P.; Gomes, R.A.T.; Borges, D.L.; Guimarães, R.F.; Pimentel, C.M.M.; de Carvalho Júnior, O.A. Instance segmentation of center pivot irrigation systems using multi-temporal SENTINEL-1 SAR images. Remote Sens. Appl. Soc. Environ. 2021, 23, 100537. [Google Scholar] [CrossRef]
- Mekhalfi, M.L.; Nicolò, C.; Bazi, Y.; Al Rahhal, M.M.; Al Maghayreh, E. Detecting Crop Circles in Google Earth Images with Mask R-CNN and YOLOv3. Appl. Sci. 2021, 11, 2238. [Google Scholar] [CrossRef]
- Tang, J.; Arvor, D.; Corpetti, T.; Tang, P. Mapping Center Pivot Irrigation Systems in the Southern Amazon from Sentinel-2 Images. Water 2021, 13, 298. [Google Scholar] [CrossRef]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Li, T.; Johansen, K.; McCabe, M.F. A machine learning approach for identifying and delineating agricultural fields and their multi-temporal dynamics using three decades of Landsat data. ISPRS J. Photogramm. Remote Sens. 2022, 186, 83–101. [Google Scholar] [CrossRef]
- Aghighi, H.; Azadbakht, M.; Ashourloo, D.; Shahrabi, H.S.; Radiom, S. Machine learning regression techniques for the silage maize yield prediction using time-series images of Landsat 8 OLI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4563–4577. [Google Scholar] [CrossRef]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Yan, D.; Zhang, X.; Nagai, S.; Yu, Y.; Akitsu, T.; Nasahara, K.N.; Ide, R.; Maeda, T. Evaluating land surface phenology from the Advanced Himawari Imager using observations from MODIS and the Phenological Eyes Network. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 71–83. [Google Scholar] [CrossRef]
- Senay, G.B.; Schauer, M.; Friedrichs, M.; Velpuri, N.M.; Singh, R.K. Satellite-based water use dynamics using historical Landsat data (1984–2014) in the southwestern United States. Remote Sens. Environ. 2017, 202, 98–112. [Google Scholar] [CrossRef]
- El Kenawy, A.M.; McCabe, M.F. A multi-decadal assessment of the performance of gauge-and model-based rainfall products over Saudi Arabia: Climatology, anomalies and trends. Int. J. Climatol. 2016, 36, 656–674. [Google Scholar] [CrossRef]
- Johansen, K.; Lopez, O.; Tu, Y.H.; Li, T.; McCabe, M.F. Center pivot field delineation and mapping: A satellite-driven object-based image analysis approach for national scale accounting. ISPRS J. Photogramm. Remote Sens. 2021, 175, 1–19. [Google Scholar] [CrossRef]
- General Authority for Statistics. The Statistical Yearbook 2019; General Authority for Statistics: Riyadh, Saudi Arabia, 2019. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Scaramuzza, P.; Barsi, J. Landsat 7 scan line corrector-off gap-filled product development. In Proceedings of the Pecora 16 Global Priorities in Land Remote Sensing, Sioux Falls, SD, USA, 23–27 October 2005; Volume 16, pp. 23–27. [Google Scholar]
- Chen, J.; Zhu, X.; Vogelmann, J.E.; Gao, F.; Jin, S. A simple and effective method for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2011, 115, 1053–1064. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the KDD-96: Proceedings, Portland, OR, USA, 2–4 August 1996; Volume 96, pp. 226–231. [Google Scholar]
- Von Luxburg, U. A tutorial on spectral clustering. Stat. Comput. 2007, 17, 395–416. [Google Scholar] [CrossRef]
- Tan, P.N.; Steinbach, M.; Kumar, V. Cluster analysis: Basic concepts and algorithms. Introd. Data Min. 2006, 8, 526–533. [Google Scholar]
- Ferrara, R.; Virdis, S.G.; Ventura, A.; Ghisu, T.; Duce, P.; Pellizzaro, G. An automated approach for wood-leaf separation from terrestrial LIDAR point clouds using the density based clustering algorithm DBSCAN. Agric. For. Meteorol. 2018, 262, 434–444. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Hopfield, J.J. Neural networks and physical systems with emergent collective computational abilities. Proc. Natl. Acad. Sci. USA 1982, 79, 2554–2558. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. Dep. Pap. (CIS) 2000, 22, 107. [Google Scholar]
- Tung, F.; Wong, A.; Clausi, D.A. Enabling scalable spectral clustering for image segmentation. Pattern Recognit. 2010, 43, 4069–4076. [Google Scholar] [CrossRef]
- Dhillon, I.S.; Guan, Y.; Kulis, B. Kernel k-means: Spectral clustering and normalized cuts. In Proceedings of the Tenth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Seattle, WA, USA, 22–25 August 2004; pp. 551–556. [Google Scholar]
- Ng, A.; Jordan, M.; Weiss, Y. On spectral clustering: Analysis and an algorithm. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Vancouver, BC, Canada, 3–8 December 2001. [Google Scholar]
- Caliński, T.; Harabasz, J. A dendrite method for cluster analysis. Commun.-Stat.-Theory Methods 1974, 3, 1–27. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F.; Matarrese, R.; Klemm, F.J., Jr. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part I: Path radiance. Appl. Opt. 2006, 45, 6762–6774. [Google Scholar] [CrossRef]
- Houborg, R.; McCabe, M.F. Impacts of dust aerosol and adjacency effects on the accuracy of Landsat 8 and RapidEye surface reflectances. Remote Sens. Environ. 2017, 194, 127–145. [Google Scholar] [CrossRef]
- Phalke, A.; Özdoğan, M.; Thenkabail, P.; Congalton, R.; Yadav, K.; Massey, R.; Teluguntla, P.; Poehnelt, J.; Smith, C. NASA Making Earth System Data Records for Use in Research Environments (MEaSUREs) Global Food Security-support Analysis Data (GFSAD) Cropland Extent 2015 Europe, Central Asia, Russia, Middle East 30 m V001 [Dataset] NASA EOSDIS Land Processes DAAC. Available online: https://www.researchgate.net/publication/331906826_NASA_Making_Earth_System_Data_Records_for_Use_in_Research_Environments_MEaSUREs_Global_Food_Security-support_Analysis_Data_GFSAD_Cropland_Extent_2015_Europe_Central_Asia_Russia_Middle_East_30_m_V001 (accessed on 12 October 2022).
- Phalke, A.R.; Özdoğan, M.; Thenkabail, P.S.; Erickson, T.; Gorelick, N.; Yadav, K.; Congalton, R.G. Mapping croplands of Europe, middle east, russia, and central asia using landsat, random forest, and google earth engine. ISPRS J. Photogramm. Remote Sens. 2020, 167, 104–122. [Google Scholar] [CrossRef]
- Ministry of Economy and Planning. First Development Plan 1970–1975; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 1970.
- Ministry of Economy and Planning. Third Development Plan 1980–1985; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 1980.
- Al-Subaiee, S.S.; Yoder, E.P.; Thomson, J.S. Extension agents’ perceptions of sustainable agriculture in the Riyadh Region of Saudi Arabia. J. Int. Agric. Ext. Educ. 2005, 12, 5–14. [Google Scholar] [CrossRef]
- Ministry of Planning. Seventh Development Plan 2000–2004; Ministry of Economy and Planning: Riyadh, Saudi Arabia, 2000.
- General Authority for Statistics. The Statistical Yearbook 2011; General Authority for Statistics: Riyadh, Saudi Arabia, 2011.
- General Authority for Statistics. The Statistical Yearbook 2012; General Authority for Statistics: Riyadh, Saudi Arabia, 2012.
- General Authority for Statistics. The Statistical Yearbook 2013; General Authority for Statistics: Riyadh, Saudi Arabia, 2013.
- General Authority for Statistics. The Statistical Yearbook 2014; General Authority for Statistics: Riyadh, Saudi Arabia, 2014.
- General Authority for Statistics. The Statistical Yearbook 2015; General Authority for Statistics: Riyadh, Saudi Arabia, 2015.
- General Authority for Statistics. The Statistical Yearbook 2016; General Authority for Statistics: Riyadh, Saudi Arabia, 2016.
- Alamri, Y.; Reed, M.R. Estimating virtual water trade in crops for saudi arabia. Am. J. Water Resour. 2019, 7, 16–22. [Google Scholar]
- Multsch, S.; Alrumaikhani, Y.; Alharbi, O.; Breuer, L. Internal water footprint assessment of Saudi Arabia using the water footprint assessment framework (WAF). In Proceedings of the 19th International Congress on Modelling and Simulation, Perth, Australia, 12–16 December 2011. [Google Scholar]
- Mekonnen, M.M.; Hoekstra, A.Y. The green, blue and grey water footprint of crops and derived crop products. Hydrol. Earth Syst. Sci. 2011, 15, 1577–1600. [Google Scholar] [CrossRef]
- McCabe, M.; Aragon, B.; Houborg, R.; Mascaro, J. CubeSats in Hydrology: Ultrahigh-Resolution Insights Into Vegetation Dynamics and Terrestrial Evaporation. Water Resour. Res. 2017, 53, 10017–10024. [Google Scholar] [CrossRef]
- Jiang, J.; Johansen, K.; Tu, Y.H.; McCabe, M.F. Multi-sensor and multi-platform consistency and interoperability between UAV, Planet CubeSat, Sentinel-2, and Landsat reflectance data. GI Sci. Remote Sens. 2022, 59, 936–958. [Google Scholar] [CrossRef]
- Johansen, K.; Ziliani, M.G.; Houborg, R.; Franz, T.E.; McCabe, M.F. CubeSat constellations provide enhanced crop phenology and digital agricultural insights using daily leaf area index retrievals. Sci. Rep. 2022, 12, 5244. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Yin, G.; Mariethoz, G.; McCabe, M.F. Gap-filling of landsat 7 imagery using the direct sampling method. Remote Sens. 2016, 9, 12. [Google Scholar] [CrossRef]
- Mohri, M.; Rostamizadeh, A.; Talwalkar, A. Foundations of Machine Learning; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Gao, X.; Huete, A.R.; Ni, W.; Miura, T. Optical–biophysical relationships of vegetation spectra without background contamination. Remote Sens. Environ. 2000, 74, 609–620. [Google Scholar] [CrossRef]
- Htitiou, A.; Boudhar, A.; Lebrini, Y.; Hadria, R.; Lionboui, H.; Elmansouri, L.; Tychon, B.; Benabdelouahab, T. The performance of random forest classification based on phenological metrics derived from Sentinel-2 and Landsat 8 to map crop cover in an irrigated semi-arid region. Remote Sens. Earth Syst. Sci. 2019, 2, 208–224. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Agricultural Region | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| North | Central | East | ||||||||||
| Year | L4 | L5 | L7 | L8 | L4 | L5 | L7 | L8 | L4 | L5 | L7 | L8 |
| 1990 | 23 | 211 | 36 | 421 | 34 | 234 | ||||||
| 1995 | 232 | 488 | 286 | |||||||||
| 2000 | 236 | 91 | 540 | 181 | 280 | 119 | ||||||
| 2005 | 155 | 166 | 47 | 392 | 244 | |||||||
| 2010 | 185 | 126 | 41 | 294 | 184 | |||||||
| 2015 | 318 | 654 | 374 | |||||||||
| 2016 | 320 | 667 | 382 | |||||||||
| 2017 | 315 | 670 | 378 | |||||||||
| 2018 | 314 | 662 | 384 | |||||||||
| 2019 | 316 | 653 | 374 | |||||||||
| 2020 | 308 | 638 | 362 | |||||||||
| 2021 | 317 | 661 | 382 | |||||||||
| Tile (Path/Row) | 2000 | 2010 | 2015 | |
|---|---|---|---|---|
| Number of images (satellite platform) | 19 (L5); 8 (L7) | 12 (L7) | 23 (L8) | |
| 165/41 | Number of fields | 793 | 1142 | 2052 |
| Acreage of fields (km) | 256 | 310 | 519 | |
| Number of images (satellite platform) | 17 (L5); 8 (L7) | 10 (L7) | 22 (L8) | |
| 166/46 | Number of fields | 2863 | 3443 | 4405 |
| Acreage of fields (km) | 992 | 1100 | 1465 | |
| Number of images (satellite platform) | 22 (L5); 6 (L7) | 11 (L7) | 23 (L8) | |
| 168/42 | Number of fields | 4603 | 4161 | 5307 |
| Acreage of fields (km) | 994 | 810 | 1015 |
| Tile (Path/Row) | 165/41 | 166/46 | 168/42 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Year | 2000 | 2010 | 2015 | 2000 | 2010 | 2015 | 2000 | 2010 | 2015 | |
| (1) | 793 | 1142 | 2052 | 2863 | 3443 | 4405 | 4603 | 4161 | 5307 | |
| (2) | 735 | 1071 | 1964 | 2788 | 3340 | 4357 | 4272 | 3794 | 5060 | |
| (3) | 734 | 1058 | 1955 | 2783 | 3311 | 4334 | 4202 | 3808 | 4958 | |
| (4) | (% of (1)) | 5 (0.6%) | 12 (1.1%) | 10 (0.5%) | 25 (0.9%) | 45 (1.3%) | 39 (0.9%) | 62 (1.3%) | 51 (1.2%) | 72 (1.4%) |
| (5) | (% of (1)) | 18 (2.3%) | 15 (1.3%) | 22 (1.1%) | 53 (1.9%) | 83 (2.4%) | 118 (2.7%) | 287 (6.2%) | 230 (5.5%) | 282 (5.3%) |
| (6) | 711 | 1031 | 1923 | 2705 | 3183 | 4177 | 3853 | 3527 | 4604 | |
| (7) | (% of (1)) | 17 (2.1%) | 31 (2.7%) | 26 (1.3%) | 34 (1.2%) | 30 (0.9%) | 7 (0.2%) | 152 (3.3%) | 103 (2.5%) | 70 (1.3%) |
| (8) | (% of (1)) | 42 (5.3%) | 53 (4.6%) | 71 (3.5%) | 46 (1.6%) | 102 (3.0%) | 64 (1.5%) | 249 (5.4%) | 250 (6.0%) | 279 (4.3%) |
| (9) | 89.7% | 90.3% | 93.7% | 94.5% | 92.4% | 94.8% | 83.7% | 84.8% | 86.8% | |
| (10) | 96.7% | 96.3% | 97.9% | 97.0% | 95.3% | 95.9% | 90.2% | 93.0% | 91.0% | |
| (11) | 94.8% | 93.4% | 93.8% | 94.9% | 94.3% | 95.7% | 90.4% | 90.0% | 88.4% | |
| (12) | 95.8% | 95.8% | 95.7% | 96.3% | 95.9% | 96.6% | 90.3% | 92.3% | 90.0% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; López Valencia, O.M.; Johansen, K.; McCabe, M.F. A Retrospective Analysis of National-Scale Agricultural Development in Saudi Arabia from 1990 to 2021. Remote Sens. 2023, 15, 731. https://doi.org/10.3390/rs15030731
Li T, López Valencia OM, Johansen K, McCabe MF. A Retrospective Analysis of National-Scale Agricultural Development in Saudi Arabia from 1990 to 2021. Remote Sensing. 2023; 15(3):731. https://doi.org/10.3390/rs15030731
Chicago/Turabian StyleLi, Ting, Oliver Miguel López Valencia, Kasper Johansen, and Matthew F. McCabe. 2023. "A Retrospective Analysis of National-Scale Agricultural Development in Saudi Arabia from 1990 to 2021" Remote Sensing 15, no. 3: 731. https://doi.org/10.3390/rs15030731
APA StyleLi, T., López Valencia, O. M., Johansen, K., & McCabe, M. F. (2023). A Retrospective Analysis of National-Scale Agricultural Development in Saudi Arabia from 1990 to 2021. Remote Sensing, 15(3), 731. https://doi.org/10.3390/rs15030731