
Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images


 , , , ,
, , , ,
Abstract
:1. Introduction
2. Related Work
3. Study Area and Data
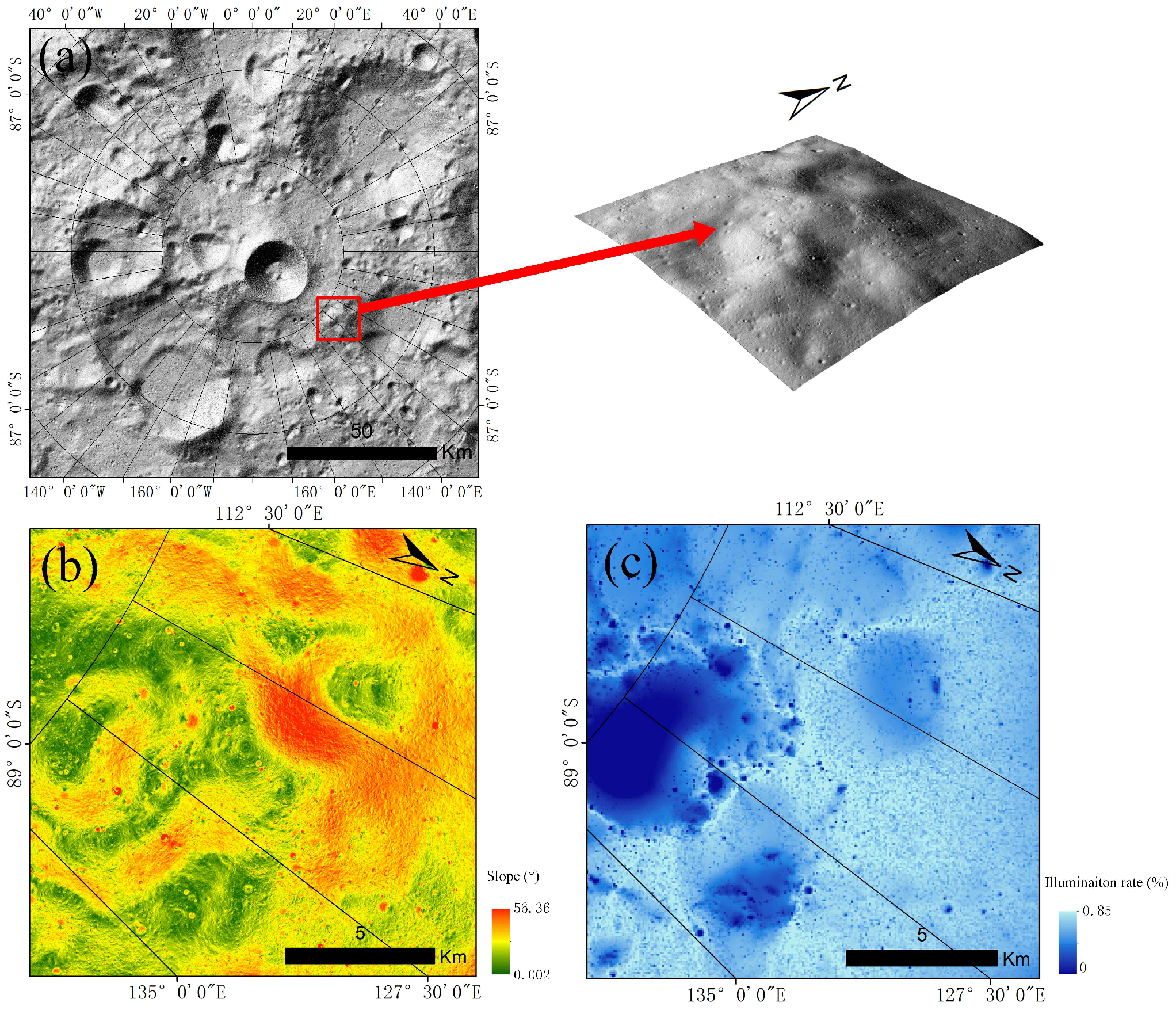
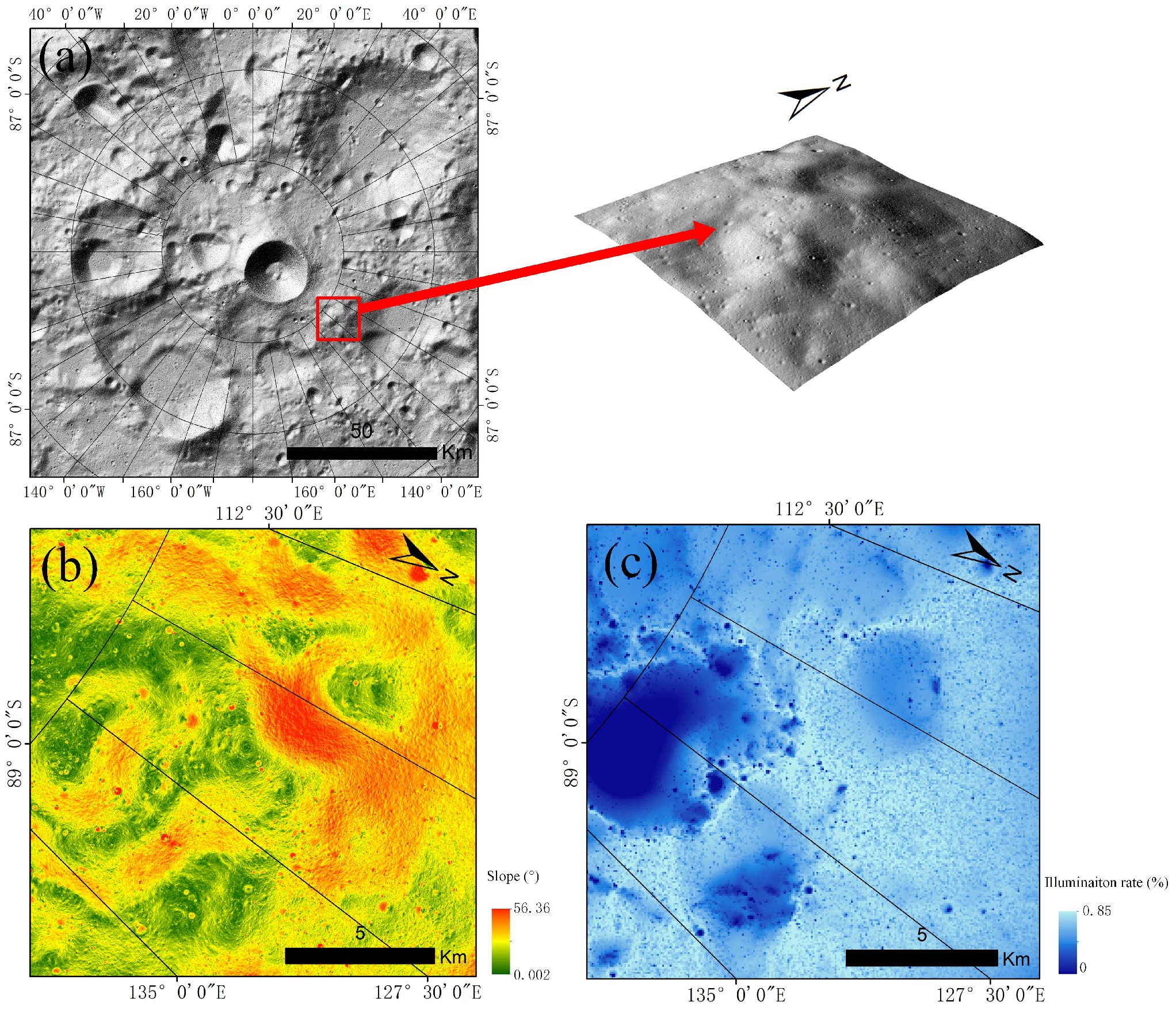
3.1. Study Area
3.2. Data
- Multi-temporal high-resolution orbital images
- 2.
- LOLA DEM (LDEM)
4. Method
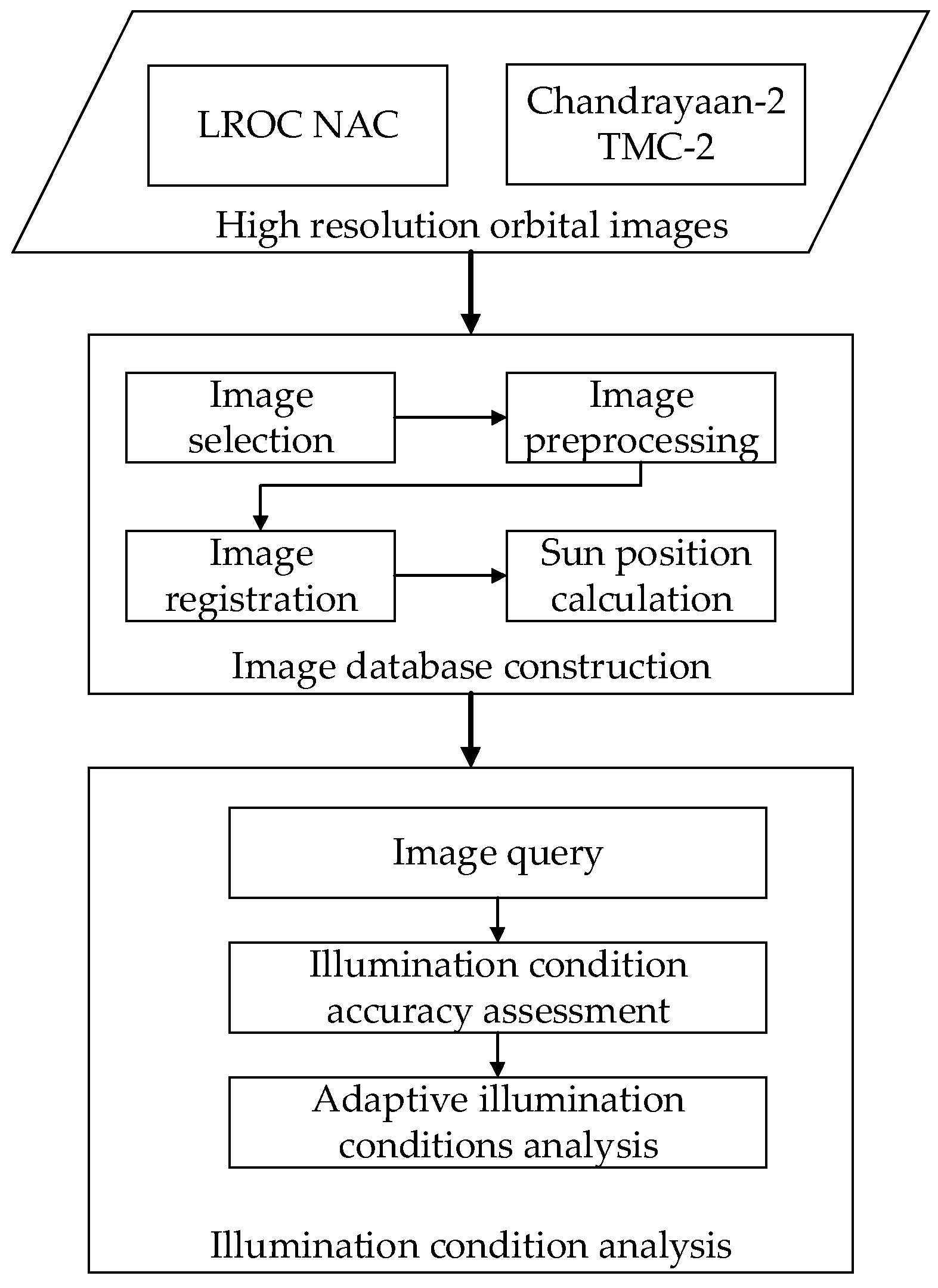
4.1. Image Database Construction
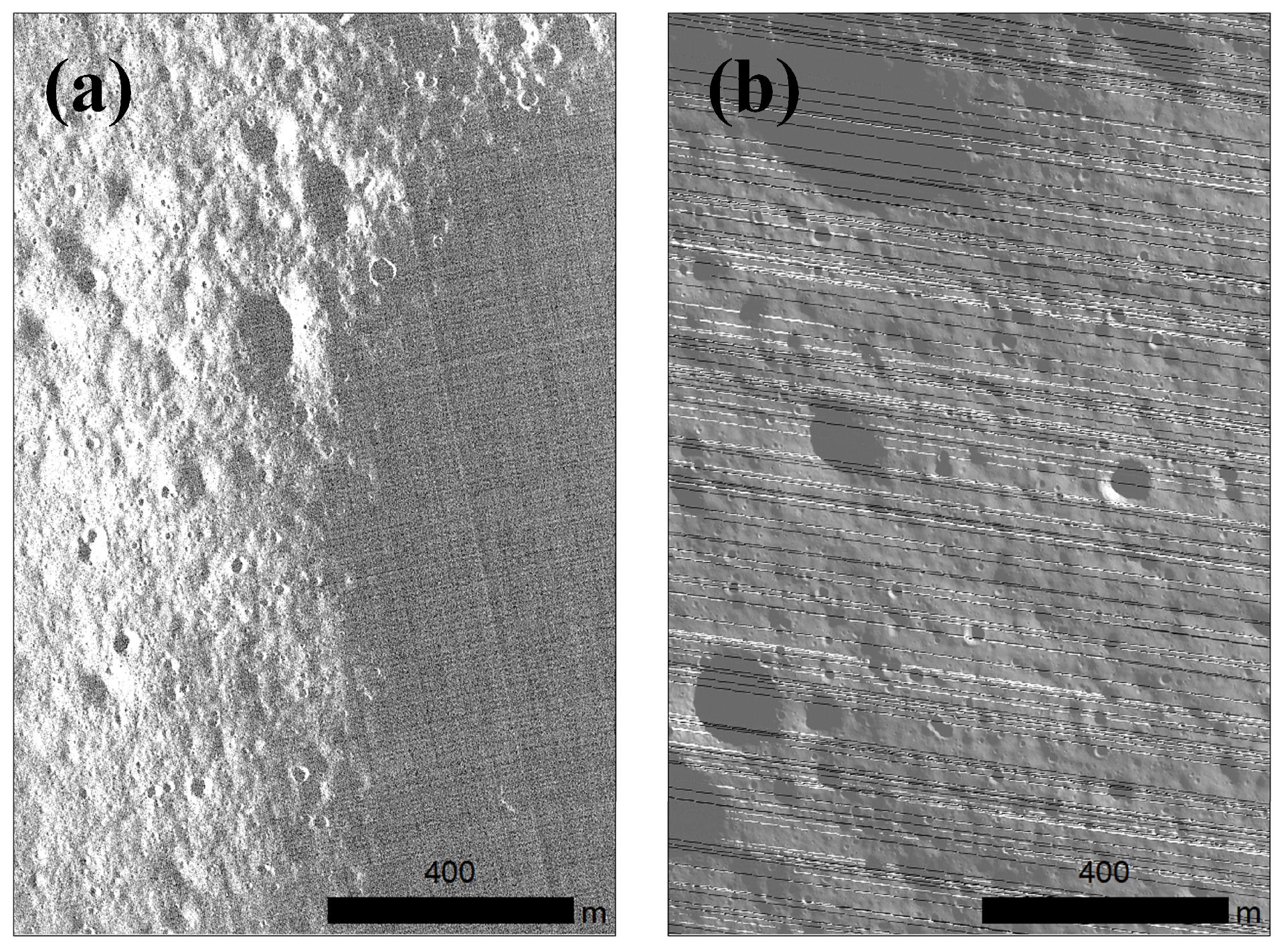
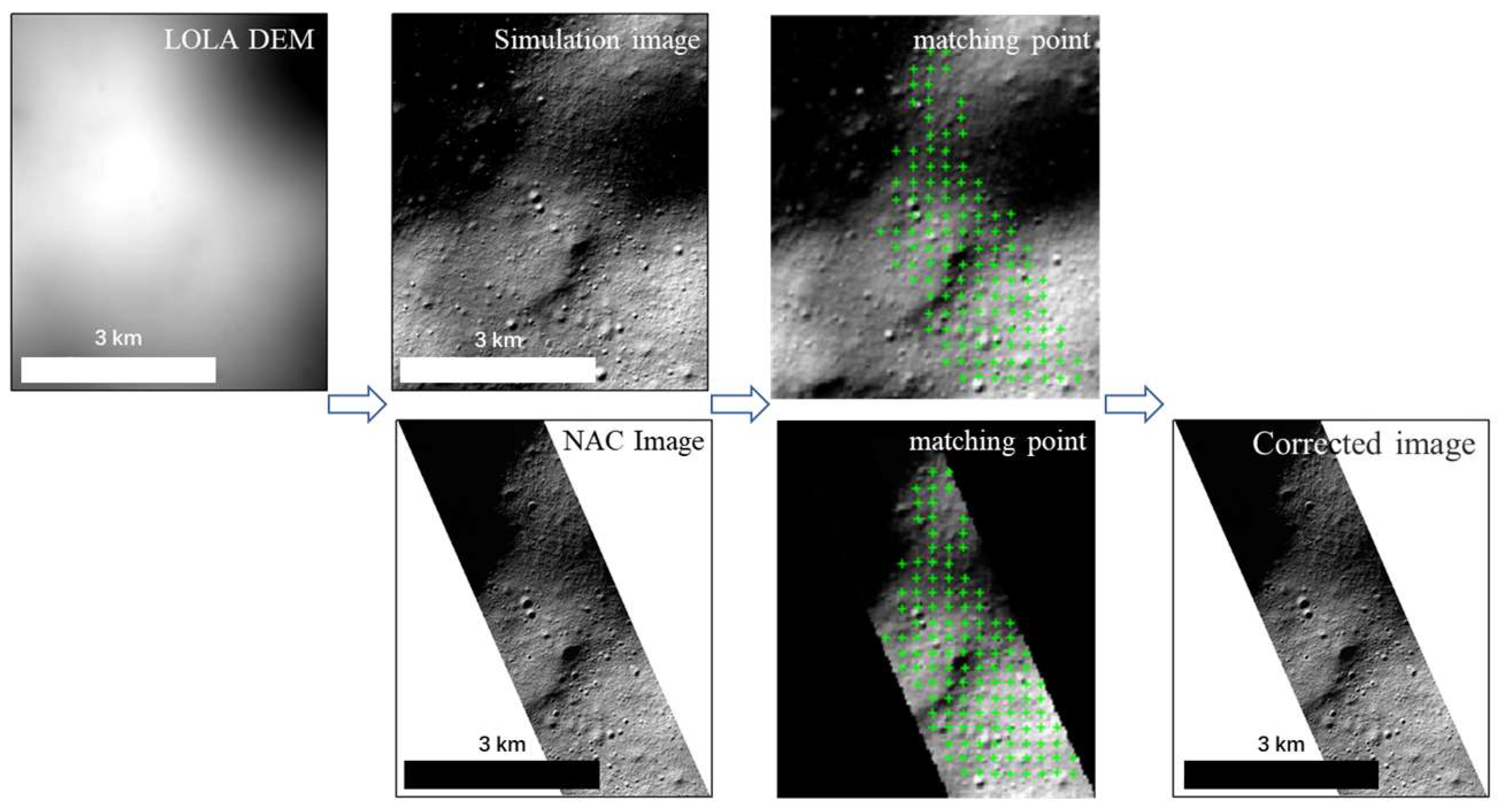
4.1.1. Image Preprocessing and Registration
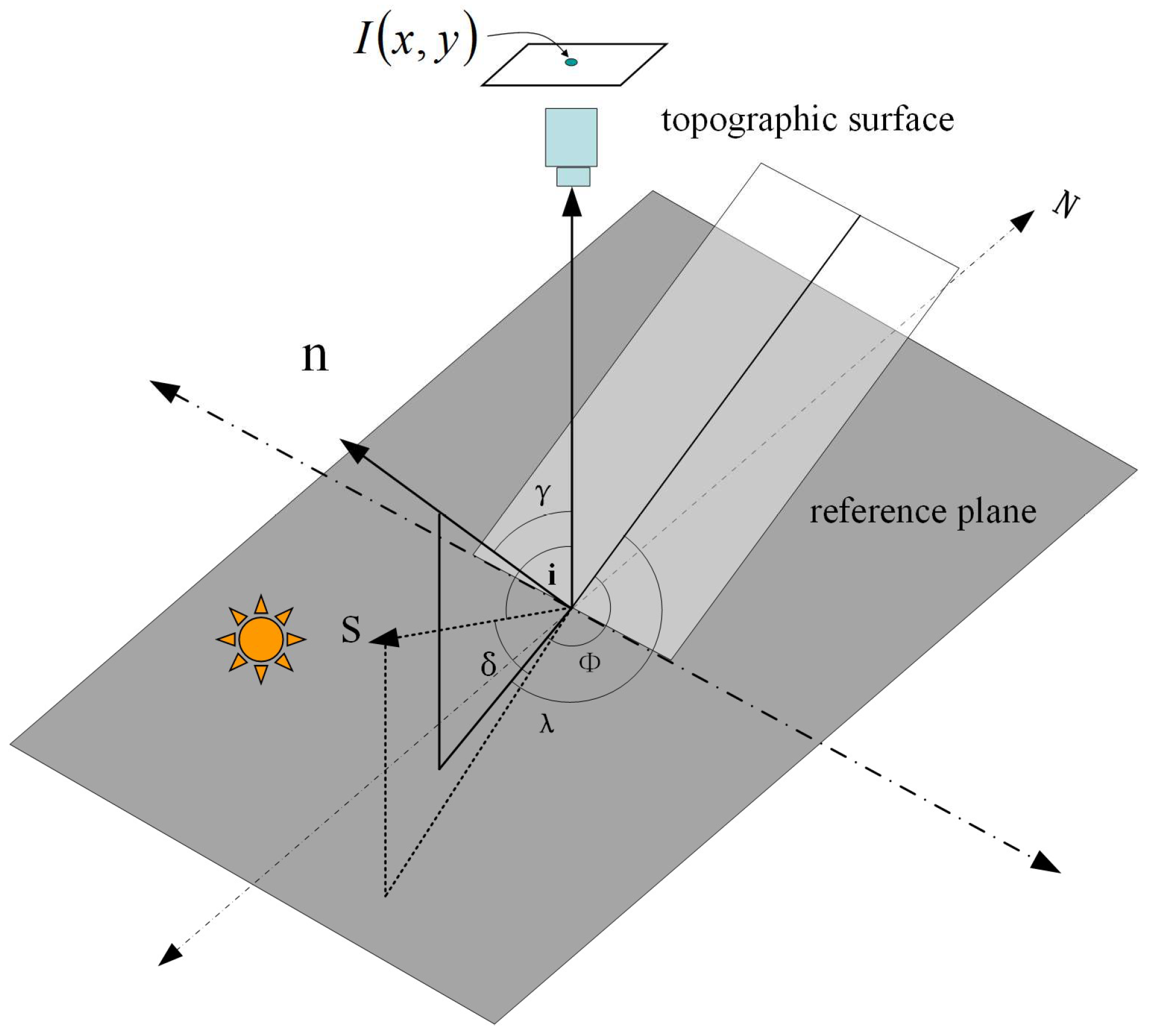
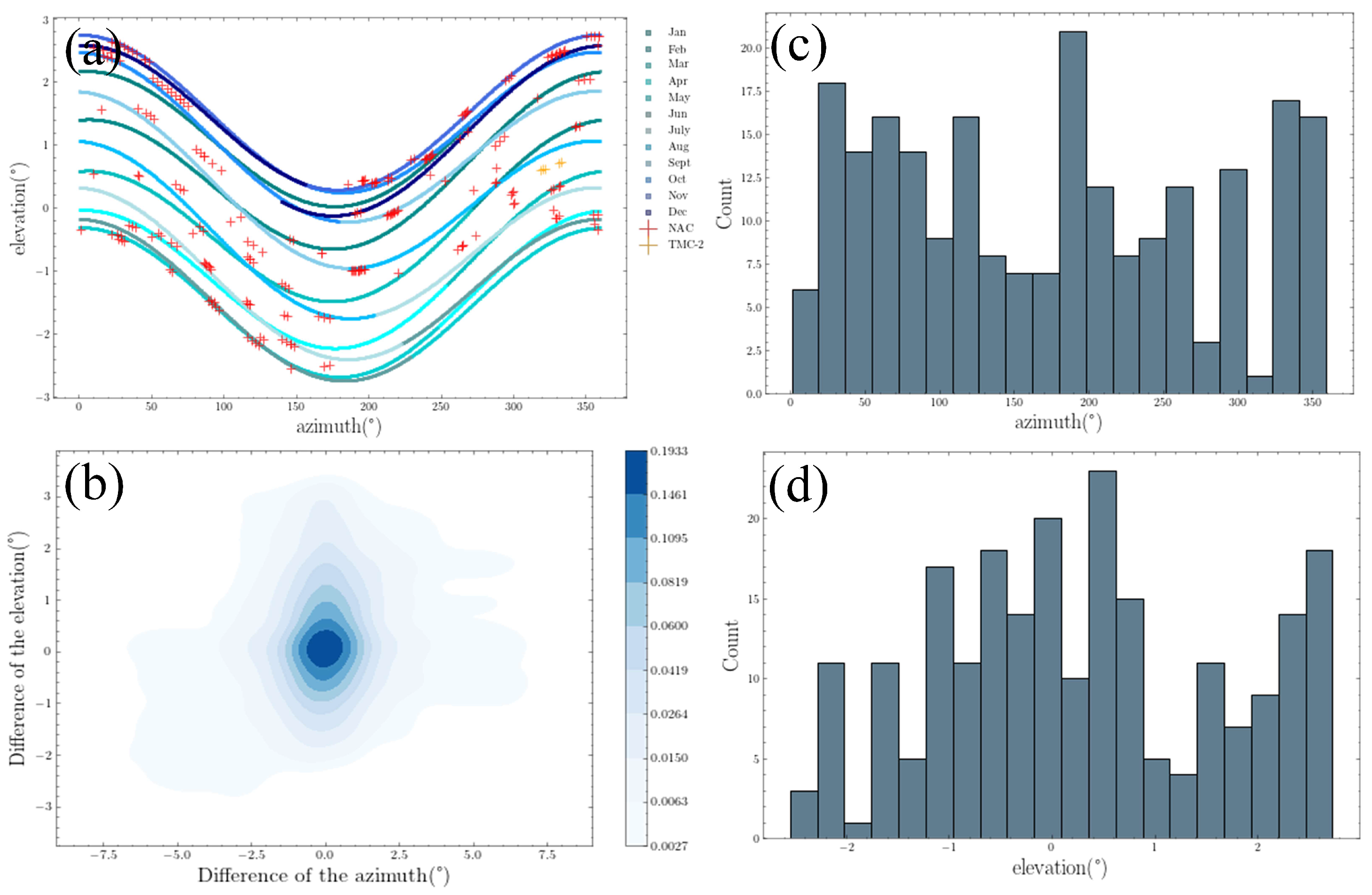
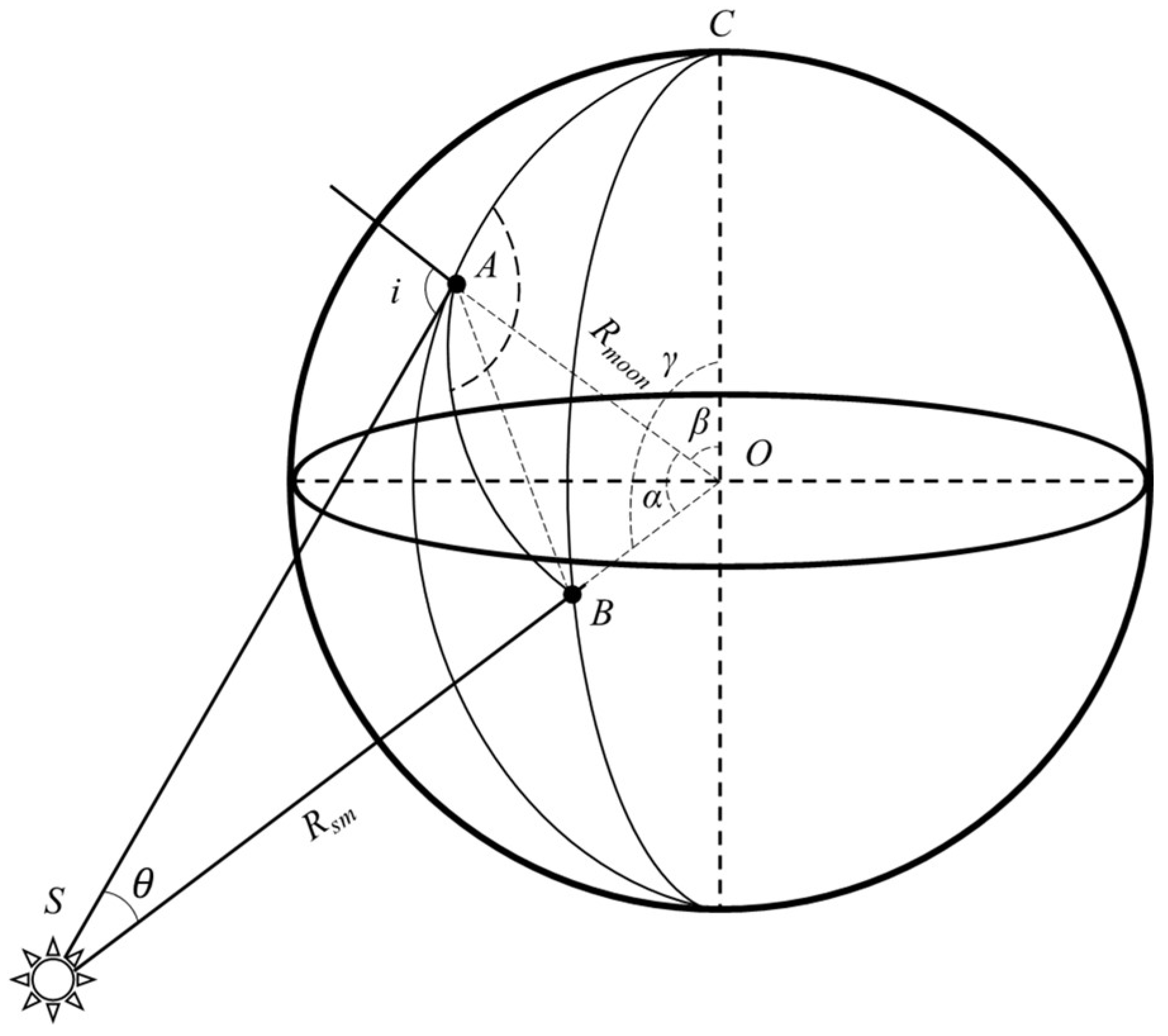
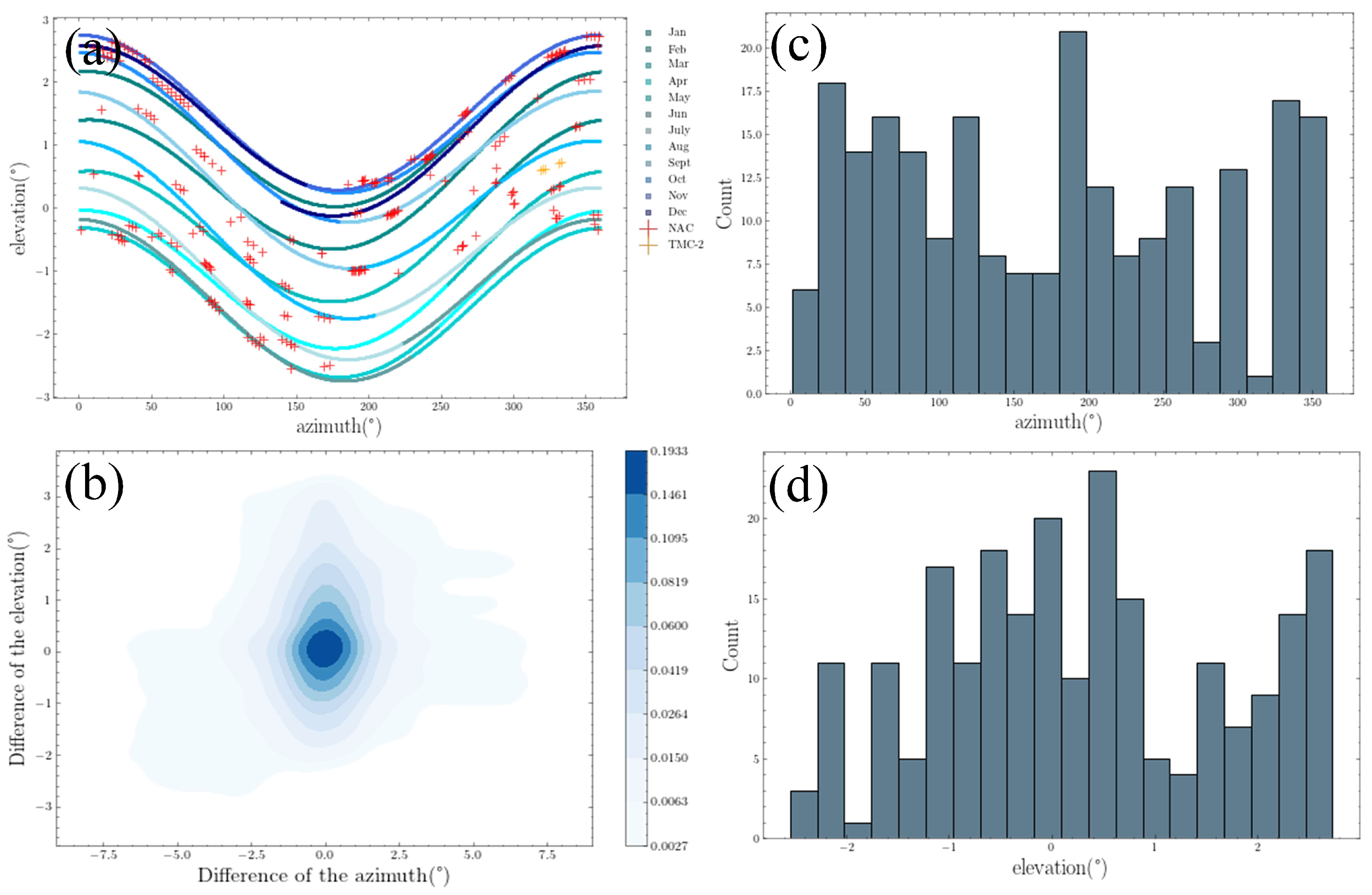
4.1.2. Sun Position Calculation
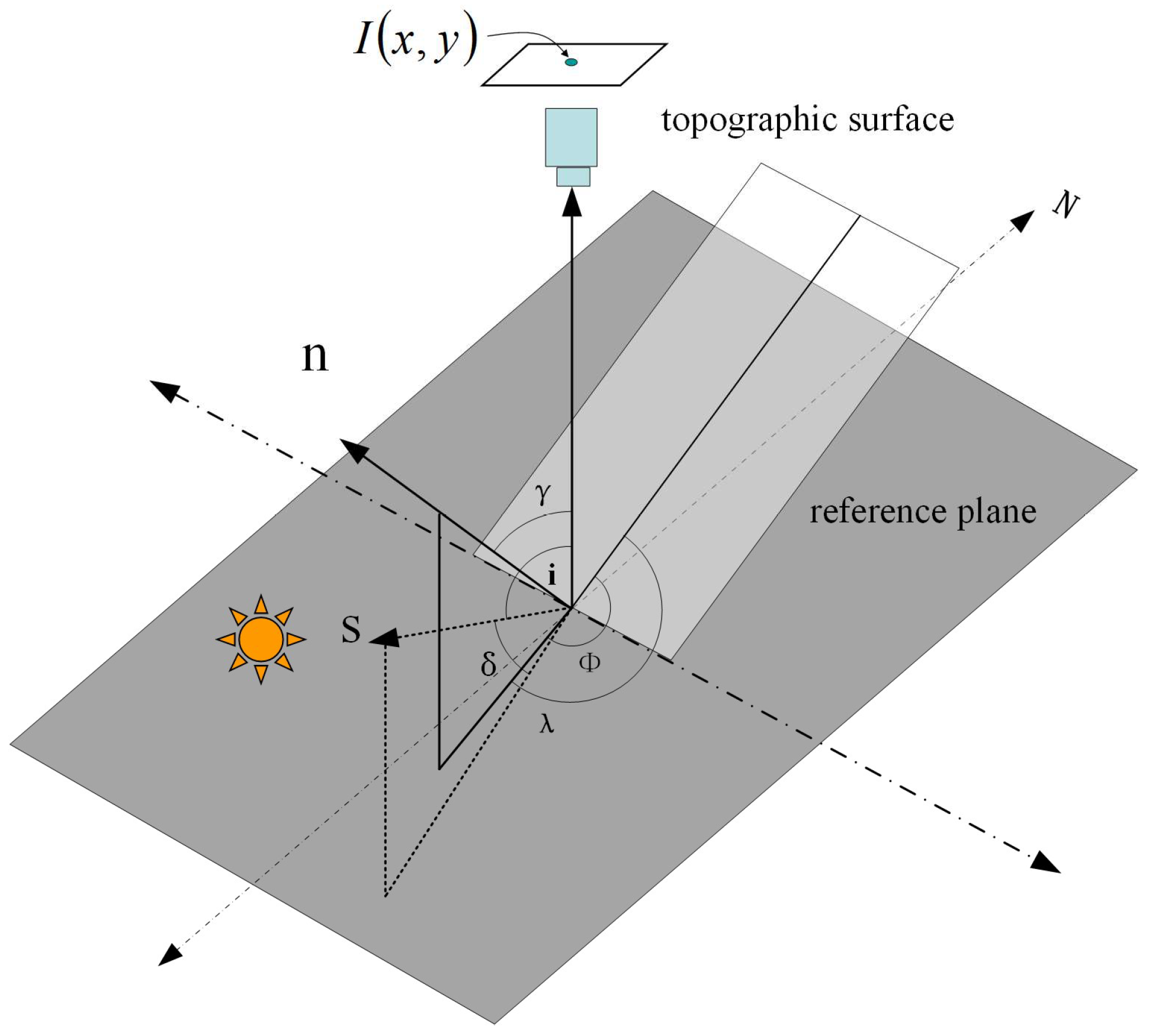
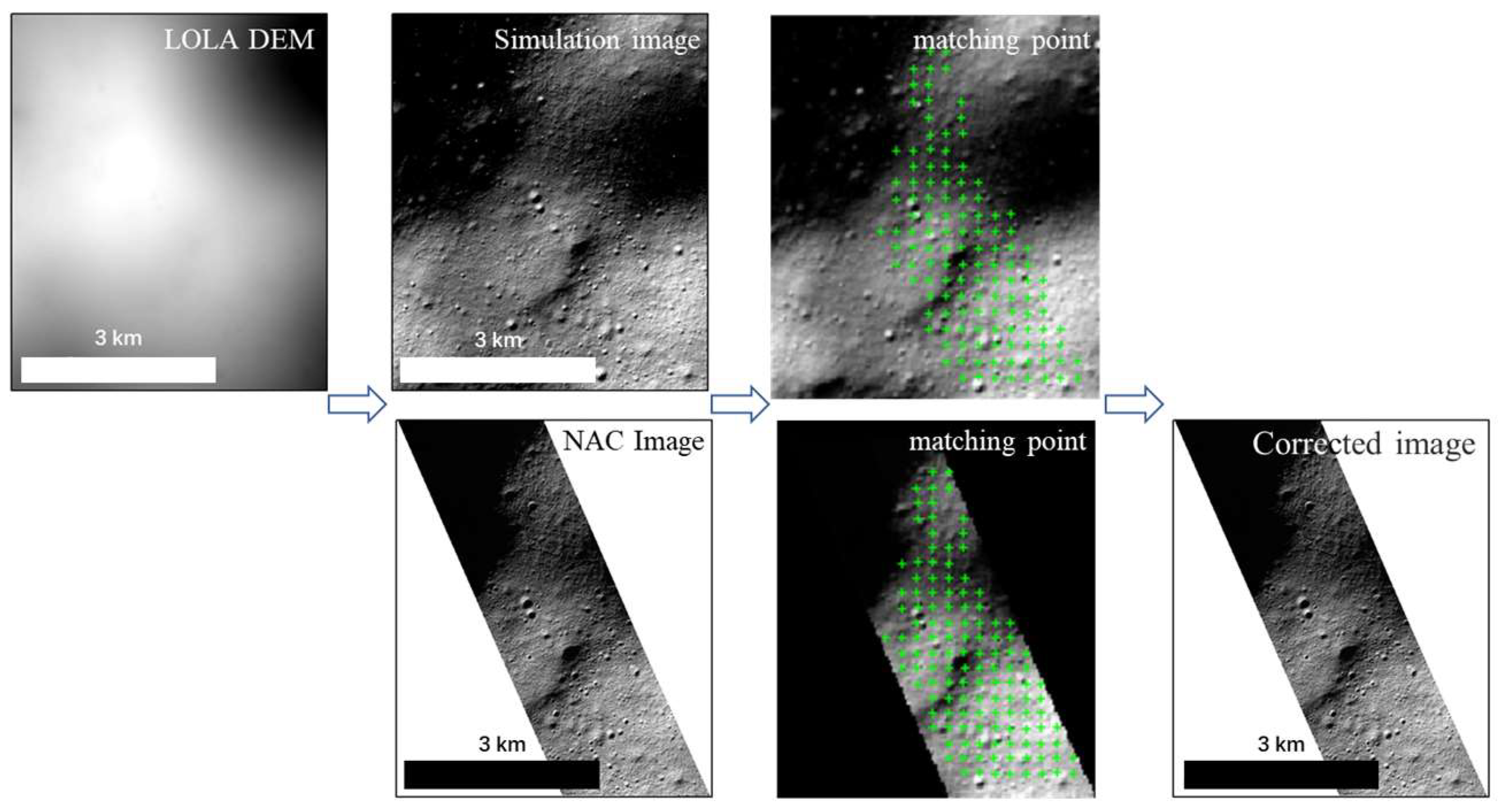
4.1.3. Image Simulation Using DEM
4.2. Illumination Analysis
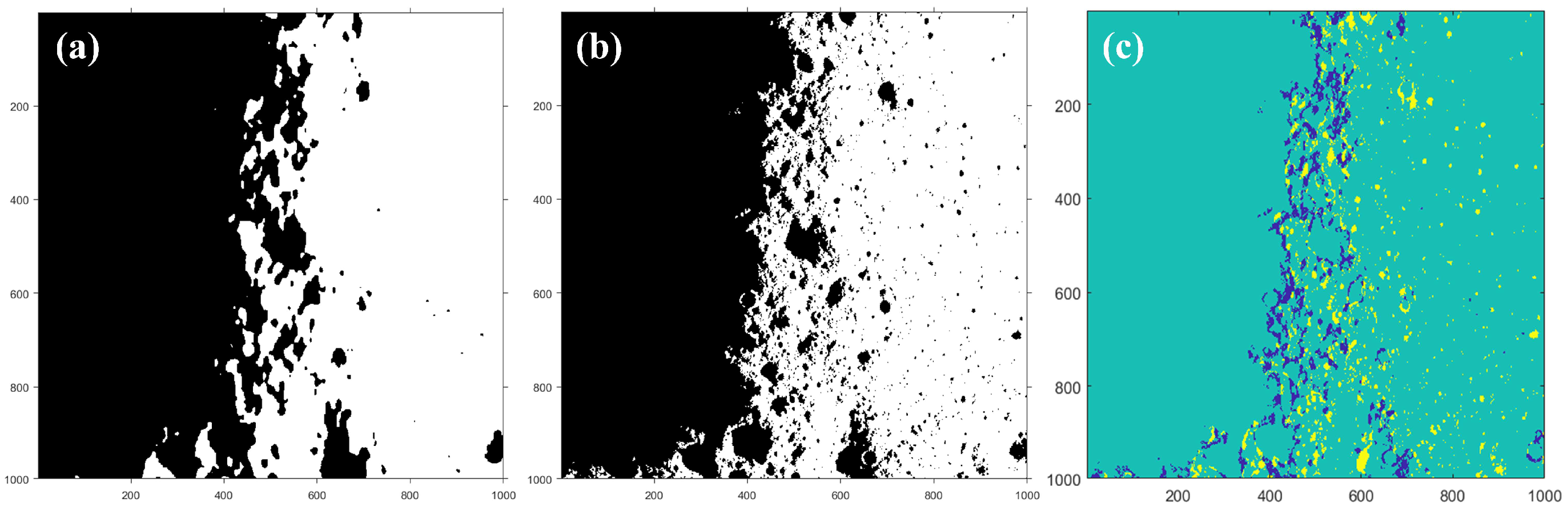
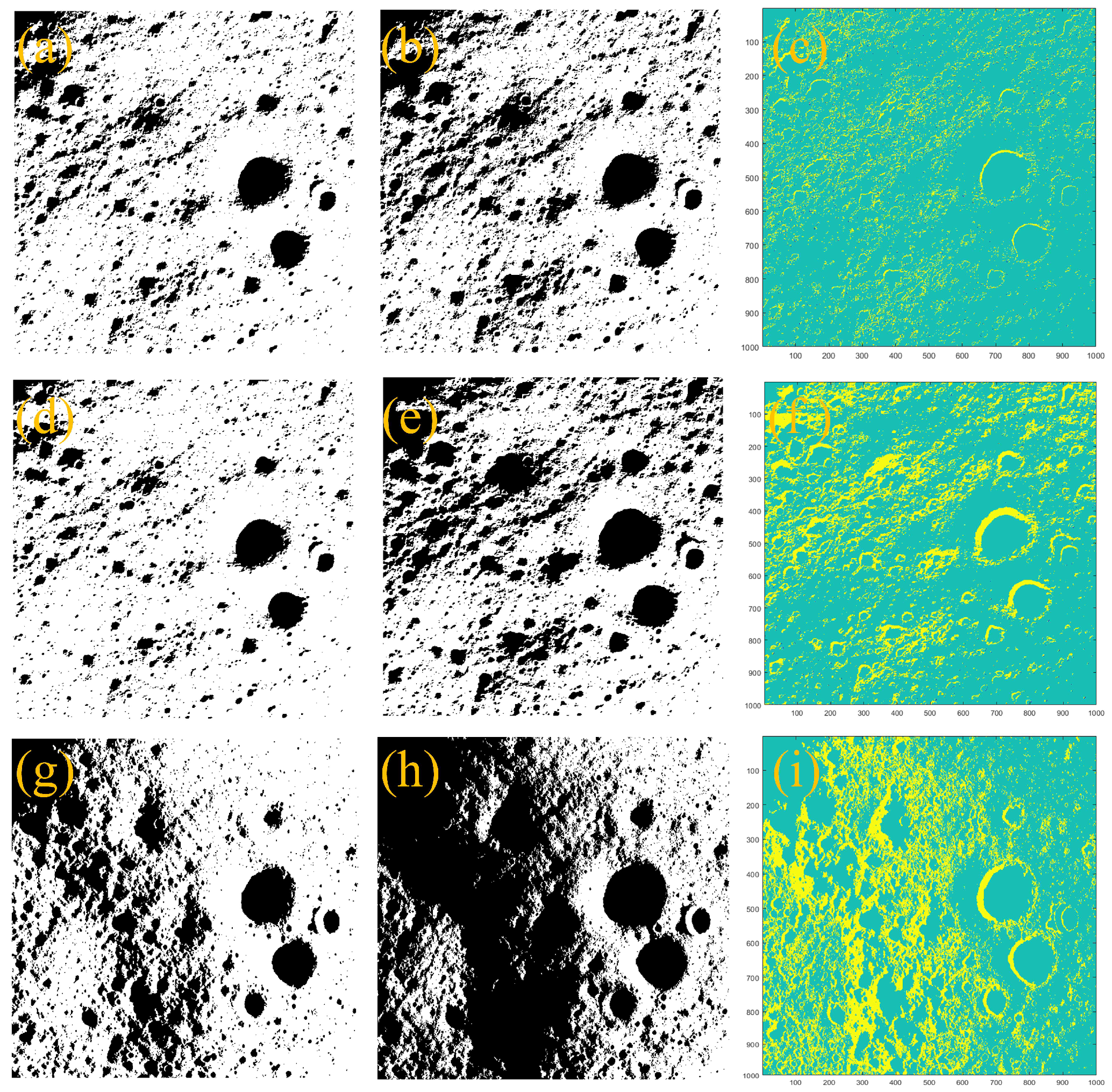
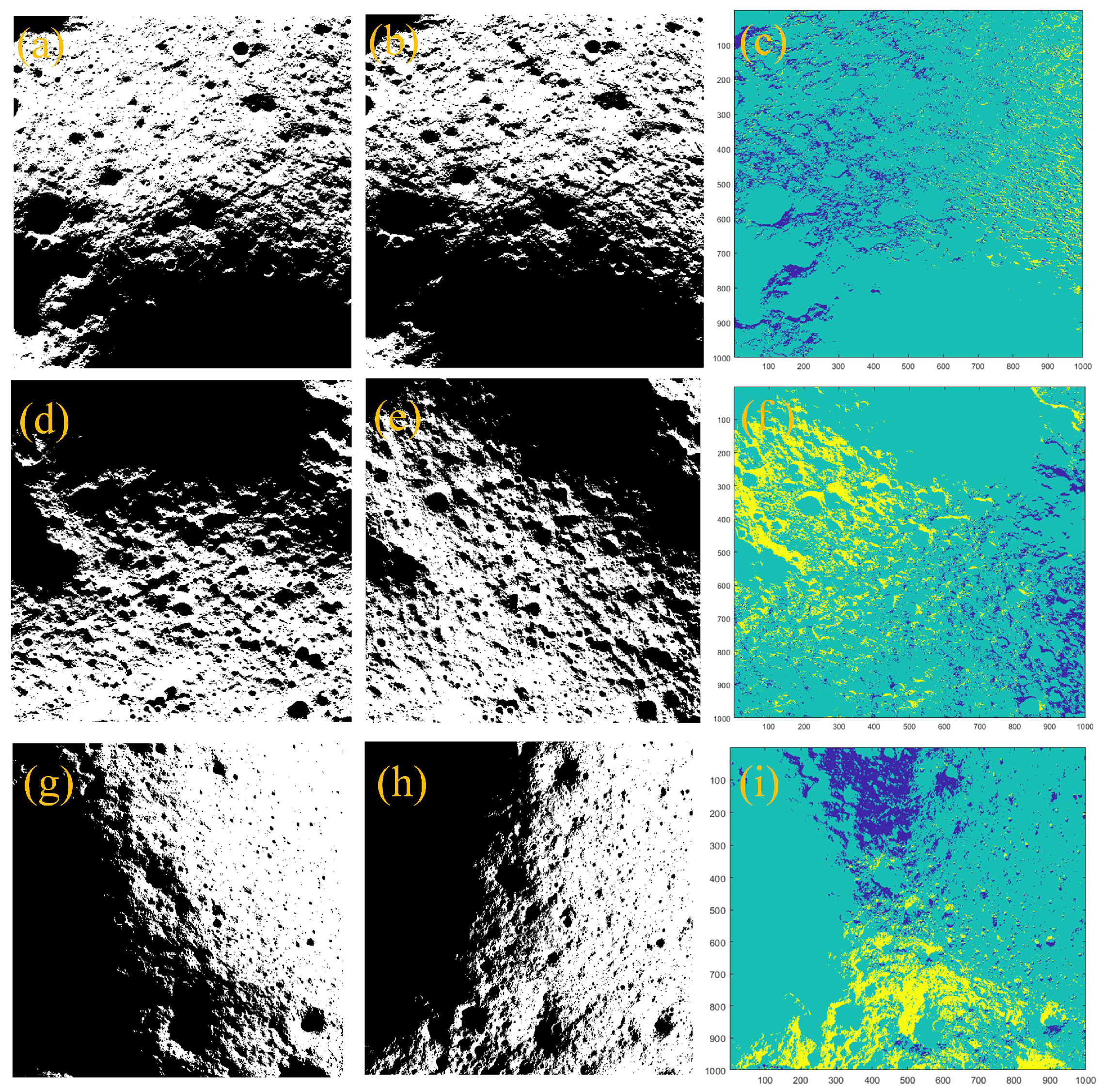
4.2.1. Illumination Condition Accuracy Assessment
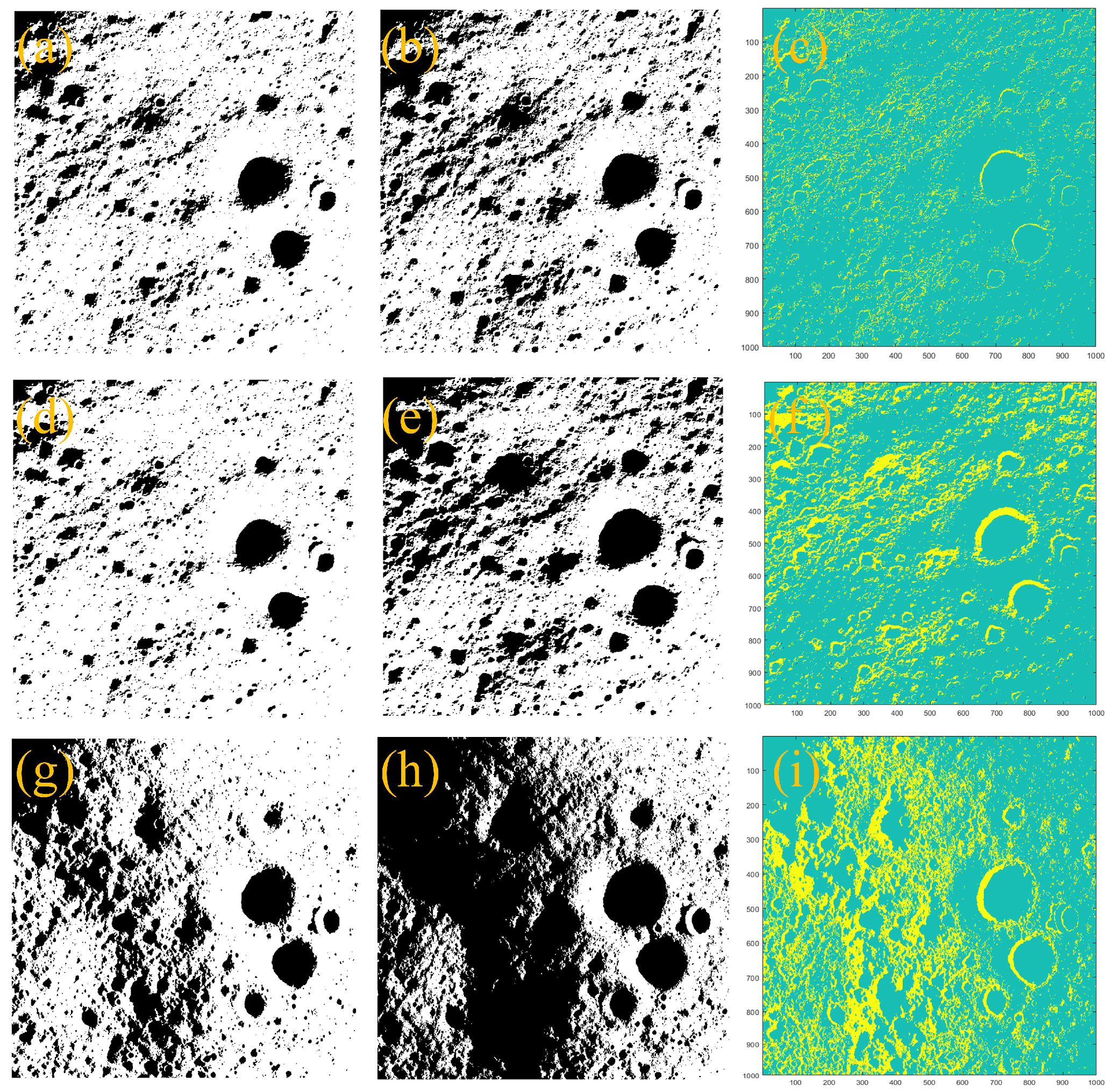
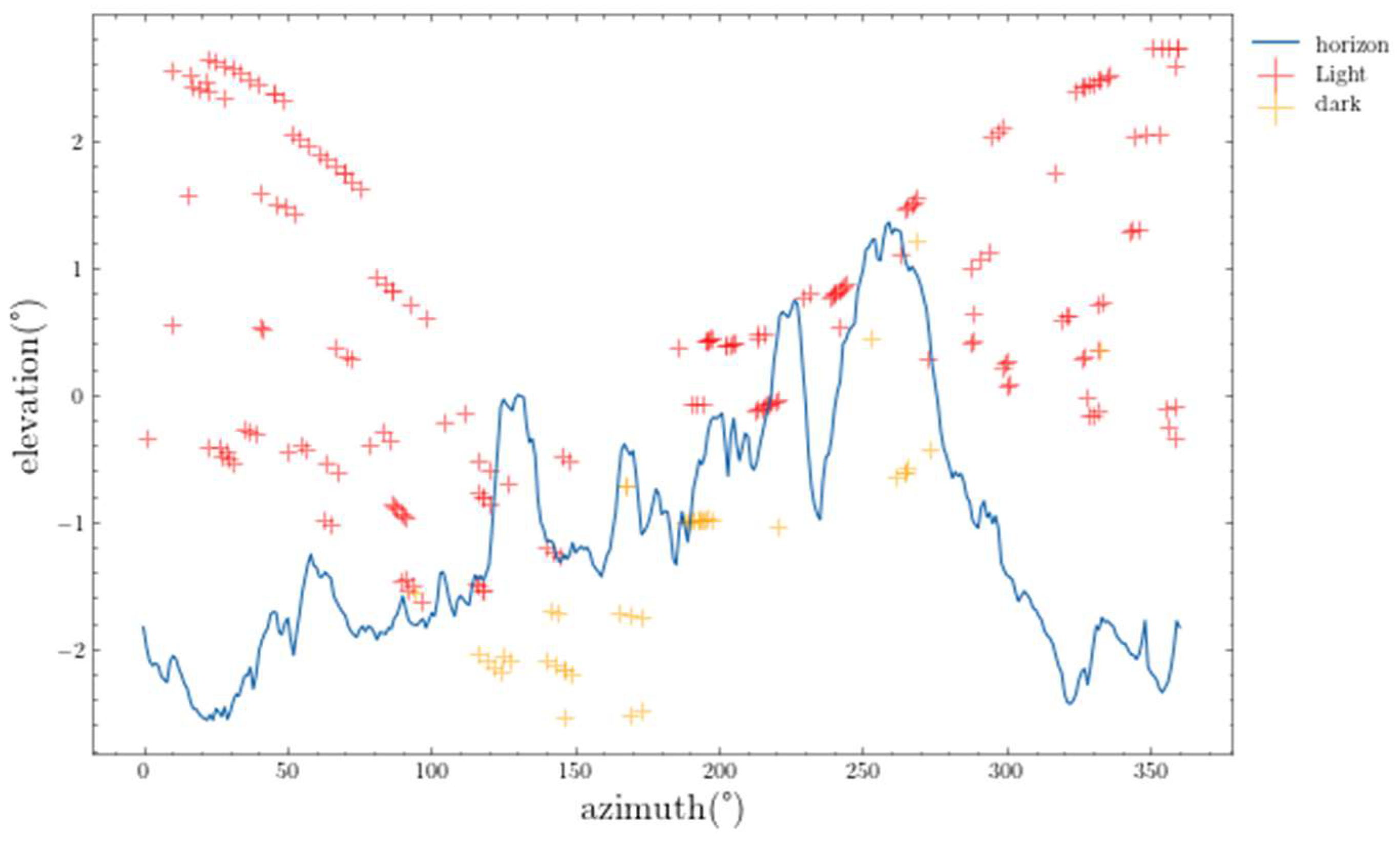
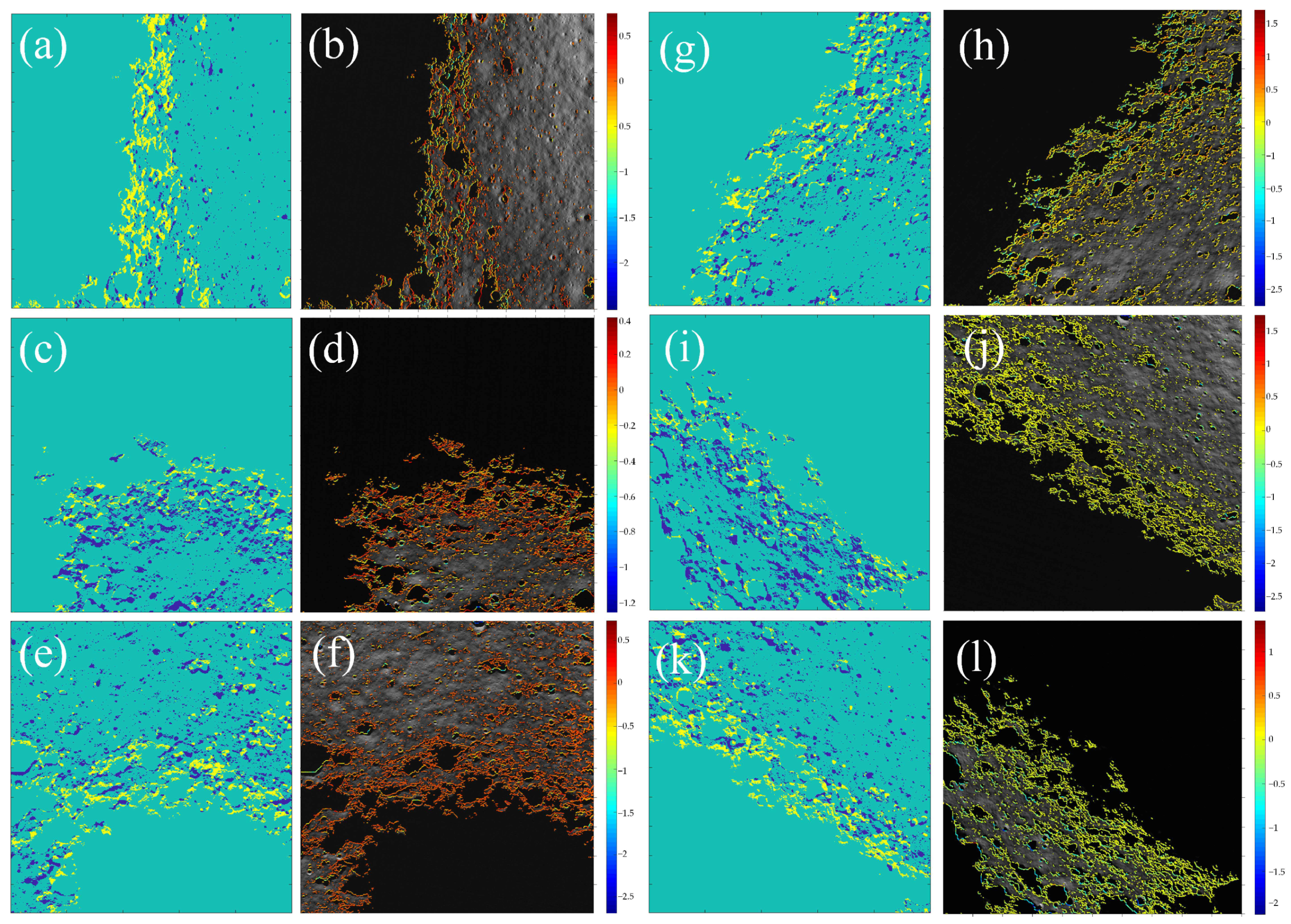
4.2.2. Adaptive Illumination Condition Analysis by Combining Images and DEM
5. Results and Discussions
5.1. Image Database Construction
5.2. Illumination Analysis Results
5.2.1. Illumination Condition Accuracy Assessment
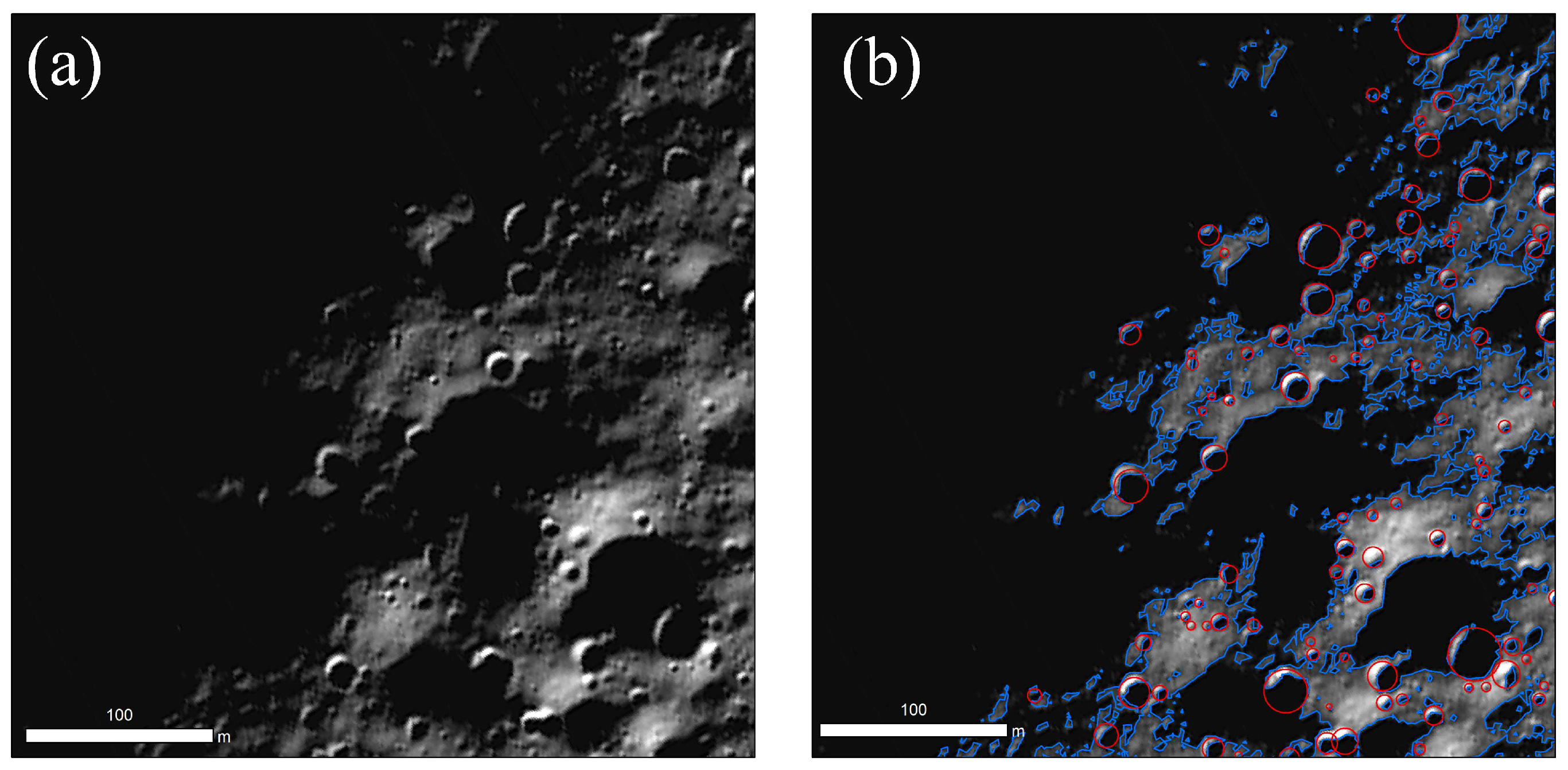
5.2.2. Adaptive Illumination Conditions Analysis
6. Conclusions
- (1)
- A high-resolution image dataset of a pre-selected landing area of Chang’E-7 was constructed using multi-temporal high-resolution images. And the feasibility of using this dataset for environmental analysis during the mission was demonstrated.
- (2)
- A registration strategy for multi-temporal overlapping images and DEM was employed to achieve a matching precision of sub-pixel level, effectively eliminating the geometric inconsistencies within the dataset.
- (3)
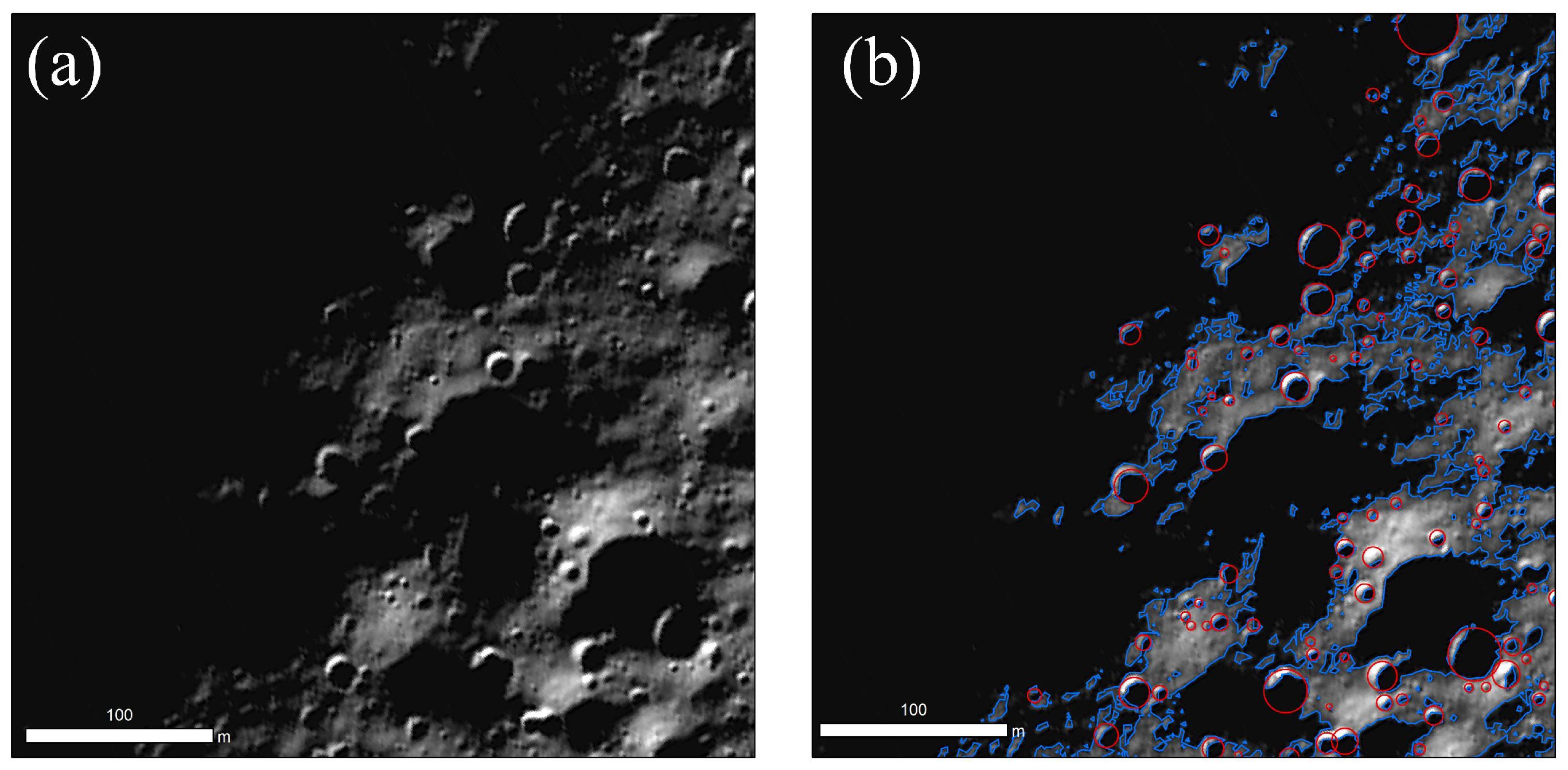
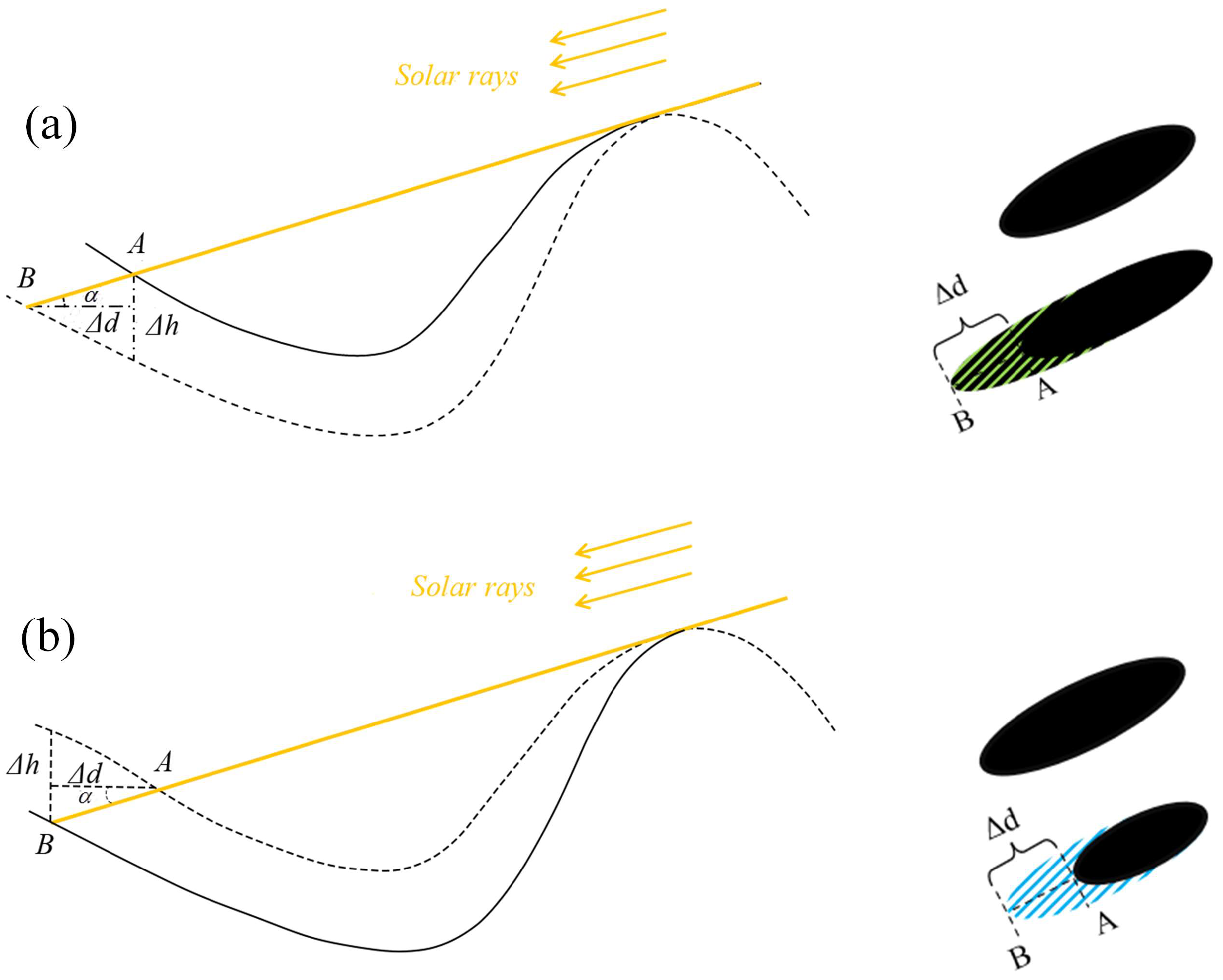
- We proposed a mismatch-shadow-length-based approach for an assessment of DEM accuracy, and the precision of illumination condition analysis using a nearest sun position image. The effectiveness and reliability of this method was demonstrated. According to our assessment, an adaptive illumination condition analysis combining images and DEM is proposed.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, P.; Dai, W.; Niu, R.; Zhang, G.; Liu, G.; Liu, X.; Bo, Z.; Wang, Z.; Zheng, H.; Liu, C. Overview of the Lunar In Situ Resource Utilization Techniques for Future Lunar Missions. Space Sci. Technol. 2023, 3, 37. [Google Scholar] [CrossRef]
- Liu, J.; Zeng, X.; Li, C.; Ren, X.; Yan, W.; Tan, X.; Zhang, X.; Chen, W.; Zuo, W.; Liu, Y.; et al. Landing Site Selection and Overview of China’s Lunar Landing Missions. Space Sci. Rev. 2020, 217, 6. [Google Scholar] [CrossRef]
- Li, C.; Wang, C.; Wei, Y.; Lin, Y. China’s present and future lunar exploration program. Science 2019, 365, 238–239. [Google Scholar] [CrossRef]
- Smith, M.; Craig, D.; Herrmann, N.; Mahoney, E.; Krezel, J.; McIntyre, N.; Goodliff, K. The artemis program: An overview of nasa’s activities to return humans to the moon. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–10. [Google Scholar]
- McKay, C.P. The case for a NASA research base on the Moon. New Space 2013, 1, 162–166. [Google Scholar] [CrossRef]
- Carruba, V.; Coradini, A. Lunar cold traps: Effects of double shielding. Icarus 1999, 142, 402–413. [Google Scholar] [CrossRef]
- Watson, K.; Murray, B.C.; Brown, H. The behavior of volatiles on the lunar surface. J. Geophys. Res. 1961, 66, 3033–3045. [Google Scholar] [CrossRef]
- Qiao, L.; Ling, Z.; Head, J.W.; Ivanov, M.A.; Liu, B. Analyses of Lunar Orbiter Laser Altimeter 1,064-nm Albedo in Permanently Shadowed Regions of Polar Crater Flat Floors: Implications for Surface Water Ice Occurrence and Future In Situ Exploration. Earth Space Sci. 2019, 6, 467–488. [Google Scholar] [CrossRef]
- Rao, W.; Fang, Y.; Peng, S.; Zhang, H.; Sheng, L.; Ma, J. Landing Site Selection Method of Lunar South Pole Region. J. Deep Space Explor. 2022, 9, 571–578. [Google Scholar] [CrossRef]
- Gläser, P.; Oberst, J.; Neumann, G.A.; Mazarico, E.; Speyerer, E.J.; Robinson, M.S. Illumination conditions at the lunar poles: Implications for future exploration. Planet. Space Sci. 2018, 162, 170–178. [Google Scholar] [CrossRef]
- Hu, T.; Yang, Z.; Li, M.; van der Bogert, C.H.; Kang, Z.; Xu, X.; Hiesinger, H. Possible sites for a Chinese International Lunar Research Station in the Lunar South Polar Region. Planet. Space Sci. 2023, 227, 105623. [Google Scholar] [CrossRef]
- Wei, G.; Li, X.; Zhang, W.; Tian, Y.; Jiang, S.; Wang, C.; Ma, J. Illumination conditions near the Moon’s south pole: Implication for a concept design of China’s Chang’E−7 lunar polar exploration. Acta Astronaut. 2023, 208, 74–81. [Google Scholar] [CrossRef]
- Margot, J.L.; Campbell, D.B.; Jurgens, R.F.; Slade, M. Topography of the lunar poles from radar interferometry: A survey of cold trap locations. Science 1999, 284, 1658–1660. [Google Scholar] [CrossRef]
- Vanoutryve, B.; De Rosa, D.; Fisackerly, R.; Houdou, B.; Carpenter, J.; Philippe, C.; Pradier, A.; Jojaghaian, A.; Espinasse, S.; Gardini, B. An analysis of illumination and communication conditions near lunar south pole based on Kaguya Data. In Proceedings of the International Planetary Probe Workshop, Barcelona, Spain, 15 June 2010; pp. 1–7. [Google Scholar]
- Bussey, D.; McGovern, J.; Spudis, P.; Neish, C.; Noda, H.; Ishihara, Y.; Sørensen, S.-A. Illumination conditions of the south pole of the Moon derived using Kaguya topography. Icarus 2010, 208, 558–564. [Google Scholar] [CrossRef]
- Noda, H.; Araki, H.; Goossens, S.; Ishihara, Y.; Matsumoto, K.; Tazawa, S.; Kawano, N.; Sasaki, S. Illumination conditions at the lunar polar regions by KAGUYA (SELENE) laser altimeter. Geophys. Res. Lett. 2008, 35, 24. [Google Scholar] [CrossRef]
- Henriksen, M.; Manheim, M.; Burns, K.; Seymour, P.; Speyerer, E.; Deran, A.; Boyd, A.; Howington-Kraus, E.; Rosiek, M.R.; Archinal, B.A. Extracting accurate and precise topography from LROC narrow angle camera stereo observations. Icarus 2017, 283, 122–137. [Google Scholar] [CrossRef]
- Barker, M.; Mazarico, E.; Neumann, G.; Zuber, M.; Haruyama, J.; Smith, D. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef]
- Mazarico, E.; Neumann, G.; Smith, D.; Zuber, M.; Torrence, M. Illumination conditions of the lunar polar regions using LOLA topography. Icarus 2011, 211, 1066–1081. [Google Scholar] [CrossRef]
- De Rosa, D.; Bussey, B.; Cahill, J.T.; Lutz, T.; Crawford, I.A.; Hackwill, T.; van Gasselt, S.; Neukum, G.; Witte, L.; McGovern, A. Characterisation of potential landing sites for the European Space Agency’s Lunar Lander project. Planet. Space Sci. 2012, 74, 224–246. [Google Scholar] [CrossRef]
- Gläser, P.; Scholten, F.; De Rosa, D.; Figuera, R.M.; Oberst, J.; Mazarico, E.; Neumann, G.; Robinson, M. Illumination conditions at the lunar south pole using high resolution Digital Terrain Models from LOLA. Icarus 2014, 243, 78–90. [Google Scholar] [CrossRef]
- Tong, X.; Huang, Q.; Liu, S.; Xie, H.; Chen, H.; Wang, Y.; Xu, X.; Wang, C.; Jin, Y. A high-precision horizon-based illumination modeling method for the lunar surface using pyramidal LOLA data. Icarus 2023, 390, 115302. [Google Scholar] [CrossRef]
- Xin, X.; Liu, B.; Di, K.; Yue, Z.; Gou, S. Geometric quality assessment of chang’E-2 global DEM product. Remote Sens. 2020, 12, 526. [Google Scholar] [CrossRef]
- Di, K.; Liu, B.; Xin, X.; Yue, Z.; Ye, L. Advances and applications of lunar photogrammetric mapping using orbital images. Acta Geod. Et Cartogr. Sin. 2019, 48, 13. [Google Scholar]
- Barker, M.K.; Mazarico, E.; Neumann, G.A.; Smith, D.E.; Zuber, M.T.; Head, J.W. Improved LOLA elevation maps for south pole landing sites: Error estimates and their impact on illumination conditions. Planet. Space Sci. 2021, 203, 105119. [Google Scholar] [CrossRef]
- Wöhler, C.; Grumpe, A.; Berezhnoy, A.; Bhatt, M.U.; Mall, U. Integrated topographic, photometric and spectral analysis of the lunar surface: Application to impact melt flows and ponds. Icarus 2014, 235, 86–122. [Google Scholar] [CrossRef]
- Wu, B.; Liu, W.C.; Grumpe, A.; Wöhler, C. Shape and albedo from shading (SAfS) for pixel-level DEM generation from monocular images constrained by low-resolution DEM. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 521–527. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Di, K.; Peng, M.; Wan, W.; Liu, Z. A Generative Adversarial Network for Pixel-Scale Lunar DEM Generation from High-Resolution Monocular Imagery and Low-Resolution DEM. Remote Sens. 2022, 14, 5420. [Google Scholar] [CrossRef]
- Tao, Y.; Muller, J.-P.; Conway, S.J.; Xiong, S.; Walter, S.H.G.; Liu, B. Large Area High-Resolution 3D Mapping of the Von Kármán Crater: Landing Site for the Chang’E-4 Lander and Yutu-2 Rover. Remote Sens. 2023, 15, 2643. [Google Scholar] [CrossRef]
- Speyerer, E.J.; Robinson, M.S. Persistently illuminated regions at the lunar poles: Ideal sites for future exploration. Icarus 2013, 222, 122–136. [Google Scholar] [CrossRef]
- Cisneros, E.; Awumah, A.; Brown, H.; Martin, A.; Paris, K.; Povilaitis, R.; Boyd, A.; Robinson, M. Lunar Reconnaissance Orbiter Camera permanently shadowed region imaging—Atlas and controlled mosaics. In Proceedings of the 48th Annual Lunar and Planetary Science Conference, Houston, TX, USA, 20–24 March 2017; p. 2469. [Google Scholar]
- Brown, H.; Boyd, A.; Sonke, A.; Huft, A.; Robinson, M.; Cisneros, E. Lunar Reconnaissance Orbiter Camera Permanently Shadowed Region Images: Updates to PSR Atlas and PSR Mosaics. LPI Contrib. 2022, 2703, 5033. [Google Scholar]
- Li, C.; Liu, J.; Ren, X.; Yan, W.; Zuo, W.; Mu, L.; Zhang, H.; Su, Y.; Wen, W.; Tan, X. Lunar global high-precision terrain reconstruction based on Chang’E-2 stereo images. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 485–495. [Google Scholar] [CrossRef]
- Flahaut, J.; Carpenter, J.; Williams, J.-P.; Anand, M.; Crawford, I.; van Westrenen, W.; Füri, E.; Xiao, L.; Zhao, S. Regions of interest (ROI) for future exploration missions to the lunar South Pole. Planet. Space Sci. 2020, 180, 104750. [Google Scholar] [CrossRef]
- Liu, N.; Shi, X.; Xu, F.; Jin, Y. Analysis of High Resolution SAR Data and Selection of Landing Sites in the Permanently Shadowed Region on the Moon. Deep. Space Explor. 2022, 9, 42–52. [Google Scholar] [CrossRef]
- Robinson, M.S.; Brylow, S.M.; Tschimmel, M.; Humm, D.; Lawrence, S.J.; Thomas, P.C.; Denevi, B.W.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.A.; et al. Lunar Reconnaissance Orbiter Camera (LROC) Instrument Overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar] [CrossRef]
- Chowdhury, A.R.; Patel, V.D.; Joshi, S.R.; Arya, A.S.; Ghonia, D.N. Terrain Mapping Camera-2 onboard Chandrayaan-2 Orbiter. Curr. Sci. 2020, 118, 566. [Google Scholar] [CrossRef]
- Chowdhury, A.R.; Saxena, M.; Kumar, A.; Joshi, S.; Amitabh, A.D.; Mittal, M.; Kirkire, S.; Desai, J.; Shah, D.; Karelia, J. Orbiter high resolution camera onboard Chandrayaan-2 orbiter. Curr. Sci. 2019, 117, 560. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Jackson, G.B.; Cavanaugh, J.F.; Neumann, G.A.; Riris, H.; Sun, X.; Zellar, R.S.; Coltharp, C.; Connelly, J. The lunar orbiter laser altimeter investigation on the lunar reconnaissance orbiter mission. Space Sci. Rev. 2010, 150, 209–241. [Google Scholar] [CrossRef]
- Becker, K.J.; Anderson, J.A.; Weller, L.A.; Becker, T.L. ISIS support for NASA mission instrument ground data processing systems. In Proceedings of the 44th Annual Lunar and Planetary Science Conference, Woodlands, TX, USA, 18–22 March 2013; p. 2829. [Google Scholar]
- Gaddis, L.; Anderson, J.; Becker, K.; Becker, T.; Cook, D.; Edwards, K.; Eliason, E.; Hare, T.; Kieffer, H.; Lee, E. An overview of the integrated software for imaging spectrometers (ISIS). In Proceedings of the Lunar and Planetary Science Conference XXVIII, Houston, TX, USA, 17–21 March 1997; p. 387. [Google Scholar]
- Liu, B.; Jia, M.; Di, K.; Oberst, J.; Xu, B.; Wan, W. Geopositioning precision analysis of multiple image triangulation using LROC NAC lunar images. Planet. Space Sci. 2018, 162, 20–30. [Google Scholar] [CrossRef]
- Mazarico, E.; Neumann, G.A.; Barker, M.K.; Goossens, S.; Smith, D.E.; Zuber, M.T. Orbit determination of the Lunar Reconnaissance Orbiter: Status after seven years. Planet. Space Sci. 2018, 162, 2–19. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Annex, A.; Pearson, B.; Seignovert, B.; Carcich, B.; Murakami, S.Y. SpiceyPy: A Pythonic Wrapper for the SPICE Toolkit. J. Open Source Softw. 2020, 5, 2050. [Google Scholar] [CrossRef]
- Park, R.S.; Folkner, W.M.; Williams, J.G.; Boggs, D.H. The JPL planetary and lunar ephemerides DE440 and DE441. Astron. J. 2021, 161, 105. [Google Scholar] [CrossRef]
- Li, X.; Wang, S.; Zheng, Y.; Cheng, A. Estimation of solar illumination on the Moon: A theoretical model. Planet. Space Sci. 2008, 56, 947–950. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image ID | Azimuth (°) | Elevation (°) | Resolution (m/pixel) | Matching Precision RMS (m) |
|---|---|---|---|---|
| M108211830LE | 21.7 | 2.5 | 1.6 | 2.8 |
| M112938905RE | 75.3 | 1.6 | 1.7 | 2.4 |
| M115334726RE | 98.0 | 0.6 | 1.7 | 2.5 |
| M108606146RE | 325.9 | 2.4 | 1.7 | 2.7 |
| M105925266RE | 344.6 | 2.0 | 1.0 | 2.8 |
| M177361050RE | 345.7 | 1.3 | 1.4 | 3.1 |
| Image ID | Azimuth (°) | Elevation (°) | TMR (Total Mismatch Rate) | LZMR (Light Zone Mismatch Rate) | DZMR (Dark Zone Mismatch Rate) | |
|---|---|---|---|---|---|---|
| Group1 | M146535043RE | 15.4002 | 1.5691 | 8.38% | 9.85% | 1.80% |
| M108252552RE | 15.8858 | 2.5164 | ||||
| Group2 | M126091501LE | 22.5770 | −0.4195 | 18.54% | 21.50% | 0.73% |
| M110759138RE | 22.2712 | 2.6430 | ||||
| Group3 | M180056477RE | 326.2872 | 0.2814 | 29.01% | 42.07% | 0% |
| M108599352RE | 326.8527 | 2.4280 |
| Image ID | Azimuth (°) | Elevation (°) | TMR (Total Mismatch Rate) | LZMR (Light Zone Mismatch Rate) | DZMR (Dark Zone Mismatch Rate) | |
|---|---|---|---|---|---|---|
| Group4 | M1101147258LE | 229.1365 | 0.7592 | 11.72% | 6.99% | 15.15% |
| M167914376RE | 238.5657 | 0.7575 | ||||
| Group5 | M184488316LE | 62.6314 | −0.9826 | 18.63% | 27.67% | 11.12% |
| M189391940RE | 91.2346 | −0.9765 | ||||
| Group6 | M139444670RE | 294.7701 | 0.0293 | 20.73% | 23.89% | 18.01% |
| M105925266RE | 344.5866 | 2.0290 |
| Image ID | Azimuth (°) | Elevation (°) | TMR | DZMR | LZMR | Average MSL(m) | Max MSL | MSL 3σ(m) | Average SBHE (m) | Max SBHE(m) | SBHE 3σ (m) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| M108585571RE | 2.4396 | 328.8039 | 7.64% | 5.11% | 9.97% | 4.345 | 40.9625 | 24.7064 | 0.1702 | 2.7965 | 1.4864 |
| M110738772RE | 2.6189 | 25.1531 | 9.96% | 13.54% | 7.16% | 4.3737 | 40.9625 | 24.3238 | 0.2123 | 2.7906 | 1.5052 |
| M115378448RE | 0.7124 | 92.2500 | 10.29% | 30.81% | 0.03% | 4.3077 | 32.4006 | 23.2036 | 0.1177 | 2.0013 | 1.2323 |
| M115701210RE | 1.5035 | 46.2911 | 9.10% | 25.17% | 2.96% | 4.4076 | 32.5753 | 23.3607 | 0.0909 | 1.2622 | 0.7323 |
| M1101147258LE | 0.7592 | 229.1366 | 11.85% | 12.96% | 10.46% | 4.2089 | 36.2278 | 20.103 | 0.123 | 2.7116 | 1.2138 |
| M1103454419LE | 1.0990 | 263.2305 | 10.33% | 11.96% | 8.73% | 4.0299 | 30.0689 | 23.3607 | 0.0947 | 2.7256 | 1.14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, B.; Di, K.; Liu, S.; Yue, Z.; Han, S.; Wang, J.; Wan, W.; Xie, B. Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images. Remote Sens. 2023, 15, 5691. https://doi.org/10.3390/rs15245691
Zhang Y, Liu B, Di K, Liu S, Yue Z, Han S, Wang J, Wan W, Xie B. Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images. Remote Sensing. 2023; 15(24):5691. https://doi.org/10.3390/rs15245691
Chicago/Turabian StyleZhang, Yifan, Bin Liu, Kaichang Di, Shaoran Liu, Zongyu Yue, Shaojin Han, Jia Wang, Wenhui Wan, and Bin Xie. 2023. "Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images" Remote Sensing 15, no. 24: 5691. https://doi.org/10.3390/rs15245691
APA StyleZhang, Y., Liu, B., Di, K., Liu, S., Yue, Z., Han, S., Wang, J., Wan, W., & Xie, B. (2023). Analysis of Illumination Conditions in the Lunar South Polar Region Using Multi-Temporal High-Resolution Orbital Images. Remote Sensing, 15(24), 5691. https://doi.org/10.3390/rs15245691