


Multi-Satellite Observation-Relay Transmission-Downloading Coupling Scheduling Method


Abstract
:1. Introduction
- In the neighborhood selection process of the tabu search algorithm, a system state evaluation function is introduced, and local search improvement rules based on satellite states are formulated to improve the local search direction according to the artificial potential field method;
- In the data transmission path planning process, two data transmission path selection strategies are designed based on the Dijkstra algorithm. Rules for selecting the problem-solving strategy are established based on the satellite cluster state, thereby enabling adaptive satellite data transmission path planning based on the satellite cluster’s state.
2. Problem Description
3. Improved Tabu Search Method for Multi-Satellite Observation-Relay Transmission-Download Coupling Scheduling
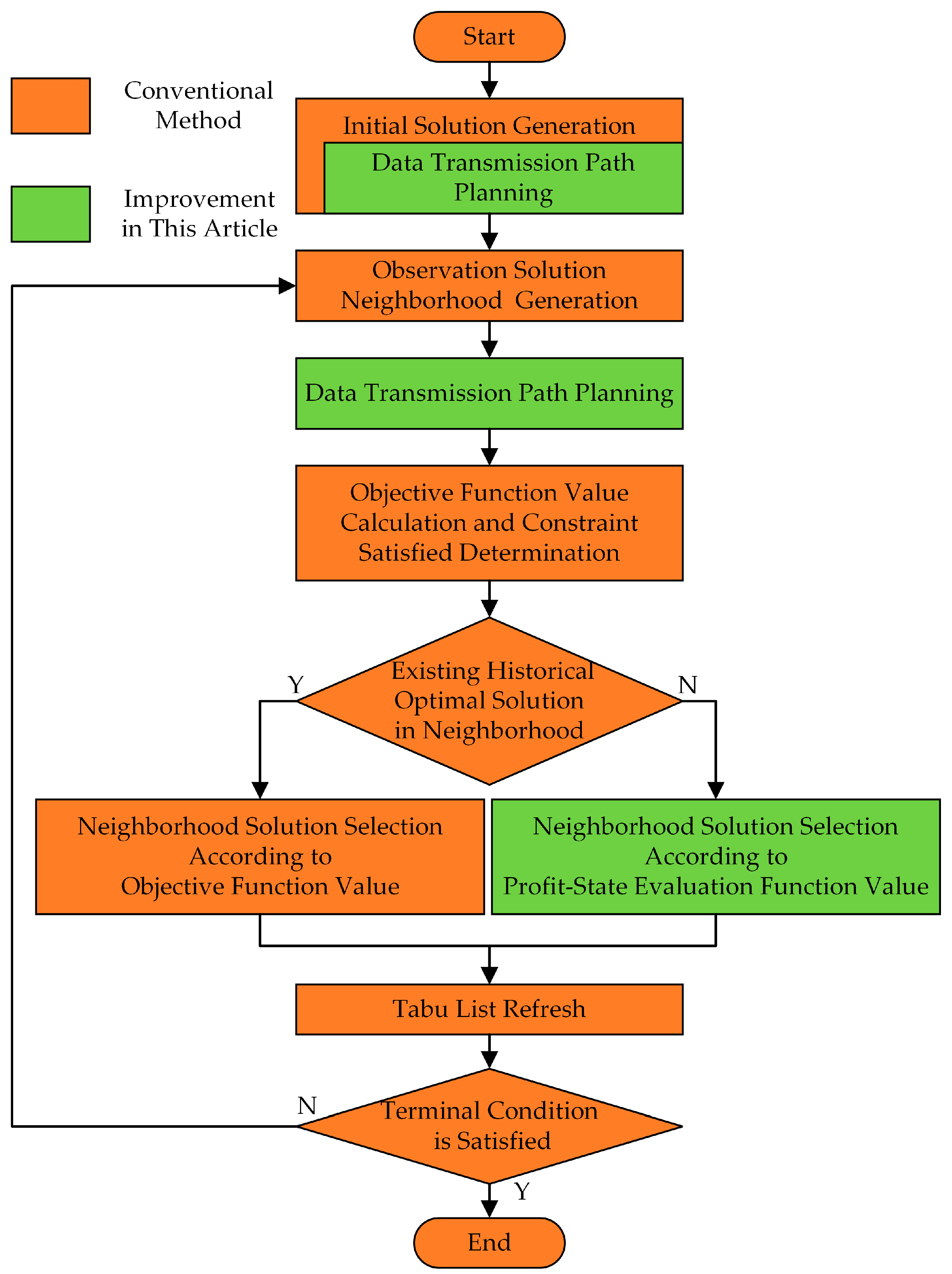
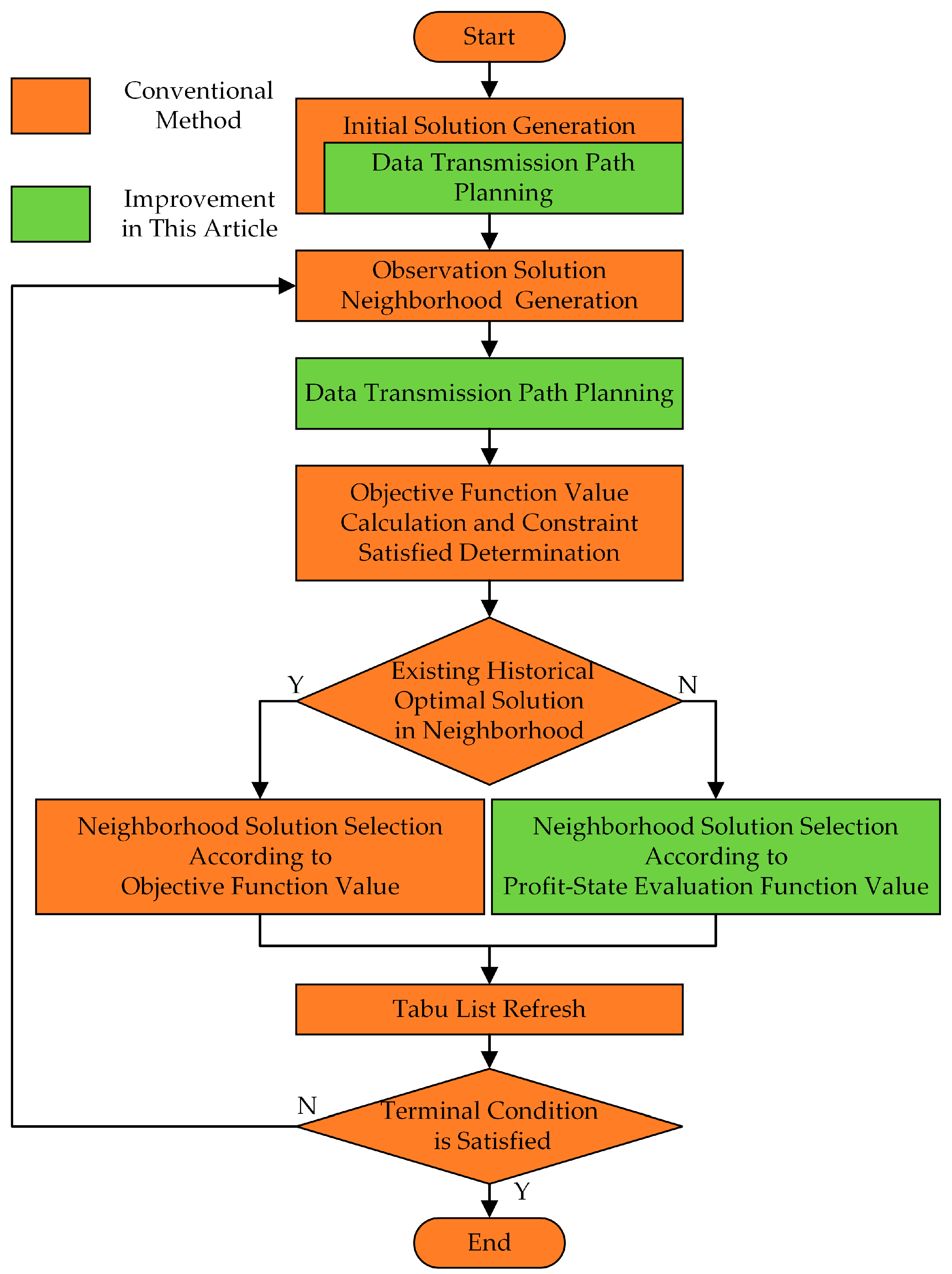
3.1. Method Framework
- Generate an initial solution using the initial solution generation method, and use this initial solution as the current solution. The process of the initial solution is described in Section 3.2;
- Generate observational neighborhood solutions based on the current solution and the local search rules;
- Determine the attitude maneuver constraint satisfaction of observation neighborhood solutions and generate the attitude maneuver history of neighborhood solutions. Calculate the inter-satellite data transmission time windows and satellite-ground data transmission time windows. Generate inter-satellite data transmission solutions yik,l and satellite-ground downloading solutions zikm through the data transmission plan method based on the observation neighborhood solutions. Calculate the satellite cluster’s status and keep all solutions that satisfy all constraints. The data transmission path plan method is described in Section 3.4. The data transmission path plan method is also used in the initial solution generation method to generate the data transmission solution of the initial observation solution;
- Evaluate the neighborhood solutions using the objective function value J. If there is a historically optimal solution in the neighborhood solutions, it is selected as the current solution and updated in the algorithm; otherwise, evaluate the neighborhood solutions using the satellite cluster profit-state evaluation function and use the historically optimal solution or current non-tabu best solution based on profit-state evaluation values as the current solution. Details related to the improvement of the observation local search process are described in Section 3.3;
- Update the tabu list;
- Repeat steps 2–5 until the algorithm termination condition is met. Output the historically optimal solution.
3.2. Initial Solution Generation Method
- All targets form the unselected target set;
- Select each target from the unselected set to perform mission insertion into each insertion position of each satellite’s current observation result sequence to generate a set of observation solution candidates;
- Calculate the sequence backward time slack of the inserted satellite for all observation solution candidates;
- Sort solutions in descending order of the backward time slack. Keep the observation solutions that meet the attitude maneuver constraint. If all solutions to a target do not meet the attitude maneuver constraint, remove the target from the unselected target set. If there is no solution remaining, go to step 8;
- Select an observation solution according to the sorting order and plan the data transmission path. Verify the constraint satisfaction of the observation solution. The data transmission path planning method is described in Section 3.4;
- If the selected solution satisfies the constraint, insert it into the satellite observation sequence according to the corresponding position and go to step 7. Otherwise, if all solutions to the selected target do not meet the constraints, remove the target from the unselected target set. In the unsatisfied situation, if there is an unprocessed observation solution, go to step 5; otherwise, go to step 7;
- If there is a target in the unselected target set, go to step 2; otherwise, go to step 8;
- End.
3.3. Improvement of Observation Solution Local Search Based on Satellite Cluster Profit-State Evaluation
3.3.1. Observation Solution Search Neighborhood
- Insertion neighborhood. The process entails selecting a mission i from the unselected mission set and choosing a satellite k and a position in the current observation result sequence of satellite k to insert mission i into the sequence;
- Deletion neighborhood. The process involves selecting a satellite k and removing an observation result i from the observation result sequence of satellite k;
- Scheduled mission exchange neighborhood. The process entails selecting two missions from the observation result sequences of satellites k and l, then swapping the positions of the two missions. If satellite k and satellite l are the same, the selected missions must be different;
- Unscheduled mission exchange neighborhood. The process involves selecting a mission i from the unselected mission set and choosing a satellite k with a mission j in its observation result sequence. Mission i is then swapped with mission j, which means mission i takes the position of mission j and is removed from the unselected mission set, while mission j is removed from the observation result sequence and added to the unselected mission set;
- Rearrangement neighborhood. The process includes taking out mission i from the observation result sequence of satellite k, then selecting another satellite l and an insertion position in the observation result sequence, and inserting mission i into satellite l’s mission observation result sequence.
3.3.2. Satellite Cluster Profit-State Evaluation Function
3.4. Rule-Based Dijkstra Data Transmission Path Scheduling Method
3.4.1. Method Process
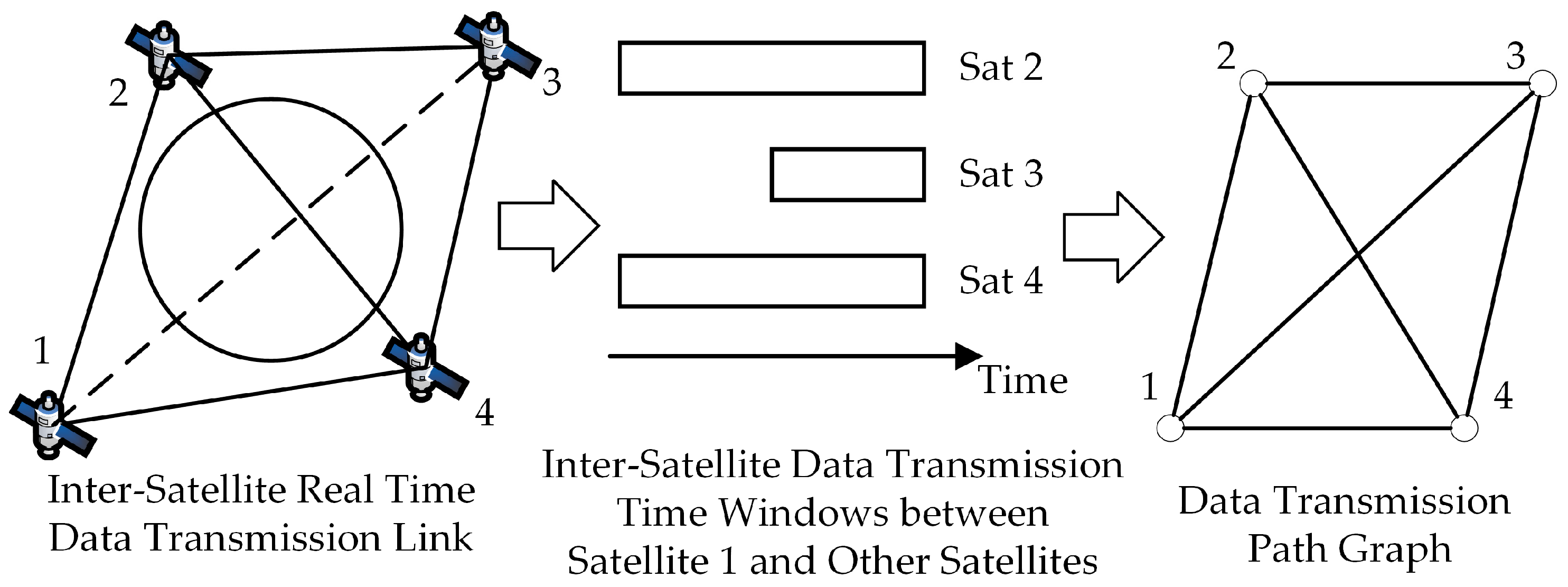
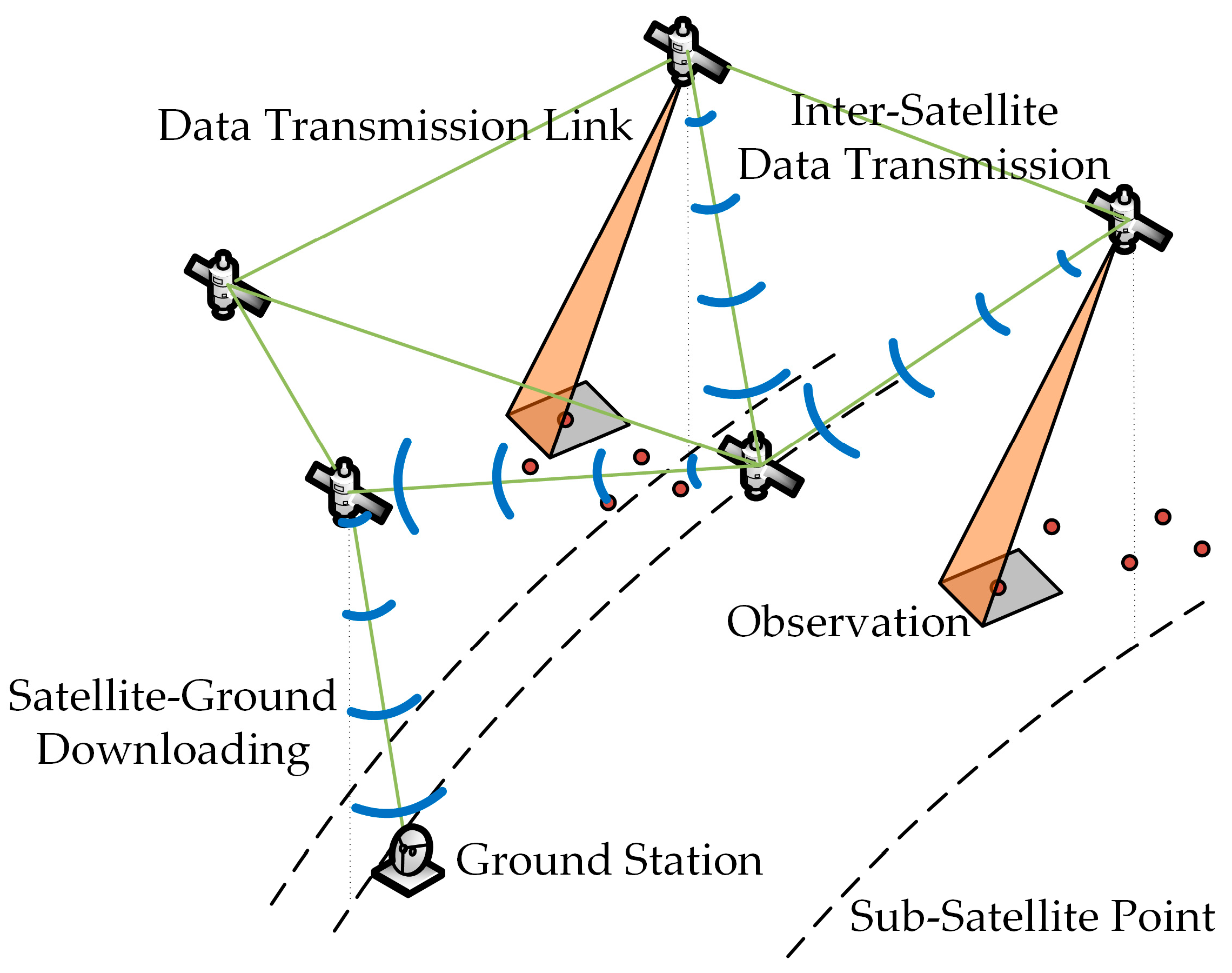
- The observation data can be temporarily saved in storage. During data transmission, there is no strict requirement to maintain continuous connectivity between all satellites. As shown in Figure 3, the generation of the data transmission path graph involves calculating inter-satellite data transmission time windows and determining if a data transmission path exists according to the data transmission time windows. In cases where satellites are not continuously connected (e.g., Satellite 1 and Satellite 3 in Figure 3), they can still be considered connectivity for data transmission if there is an inter-satellite data transmission time window between satellites;
- There can be multiple satellite nodes downloading data. It is necessary to identify the available satellites for downloading, find the optimal path for each download satellite, and pick the optimal solution among them;
- The distance between data transmission nodes will change with the data transmission mission arrangement.
- Based on the current observation solutions xkiCur and gki,jCur, determine the observation result sequences sk for each satellite, where , and ntk is the number of observation targets for satellite k. Combine the observation result sequences of all satellites into one mission sequence ;
- Calculate the satellite cluster’s status according to observation solutions and data transmission solutions related to missions that finished data transmission path planning;
- Select a mission Mki in the mission sequence S by order. Take the satellite corresponding to the observation of mission Mki as the starting satellite node l. Put the starting node into the selected node set NDs, and put other satellite nodes into the unselected node set NDu. Calculate the total distance dl for the starting node. Initialize the total distance for the nodes in the unselected node and set NDu to infinity. Set the starting node as the current node;
- Select the data transmission path planning strategy; the selection rules are described in Section 3.4.2. Calculate the inter-node distance al,lu between the current node l and all unselected nodes lu in the unselected node set NDu based on the selected strategy. The calculation method for node distance is described in Section 3.4.3. Update dlu according to the smaller value between dl + al, lu and dlu;
- Select the node l’ in the unselected node set NDu with the smallest dlu, and mark the current node l as the previous node of the node l’. Put l’ into the selected node set and delete it from the unselected node set. Set l’ as the current node l;
- Repeat steps 4–5 until there is no node left in the unselected node set;
- Record all the shortest paths corresponding to nodes that can download Mki data. Sort recorded paths in ascending order based on the total distance d to the downloading nodes;
- Calculate the satellite cluster’s status and determine whether the constraints are satisfied for each recorded path by order. If a data transmission path satisfies the constraint, the mission can be transmitted through the path. Update solutions xki, yik,l, zikm, inter-satellite data transmission time, and satellite-ground data downloading time, and return to step 2. If no path satisfies the constraints, the observation solution does not satisfy the constraints and is considered infeasible, and the algorithm ends. If there are no remaining missions, the observation solution is feasible, the data transmission path planning for the corresponding observation solution is completed, and the algorithm ends.
3.4.2. State-Strategy Select Rules
3.4.3. Node Distance Calculation Method
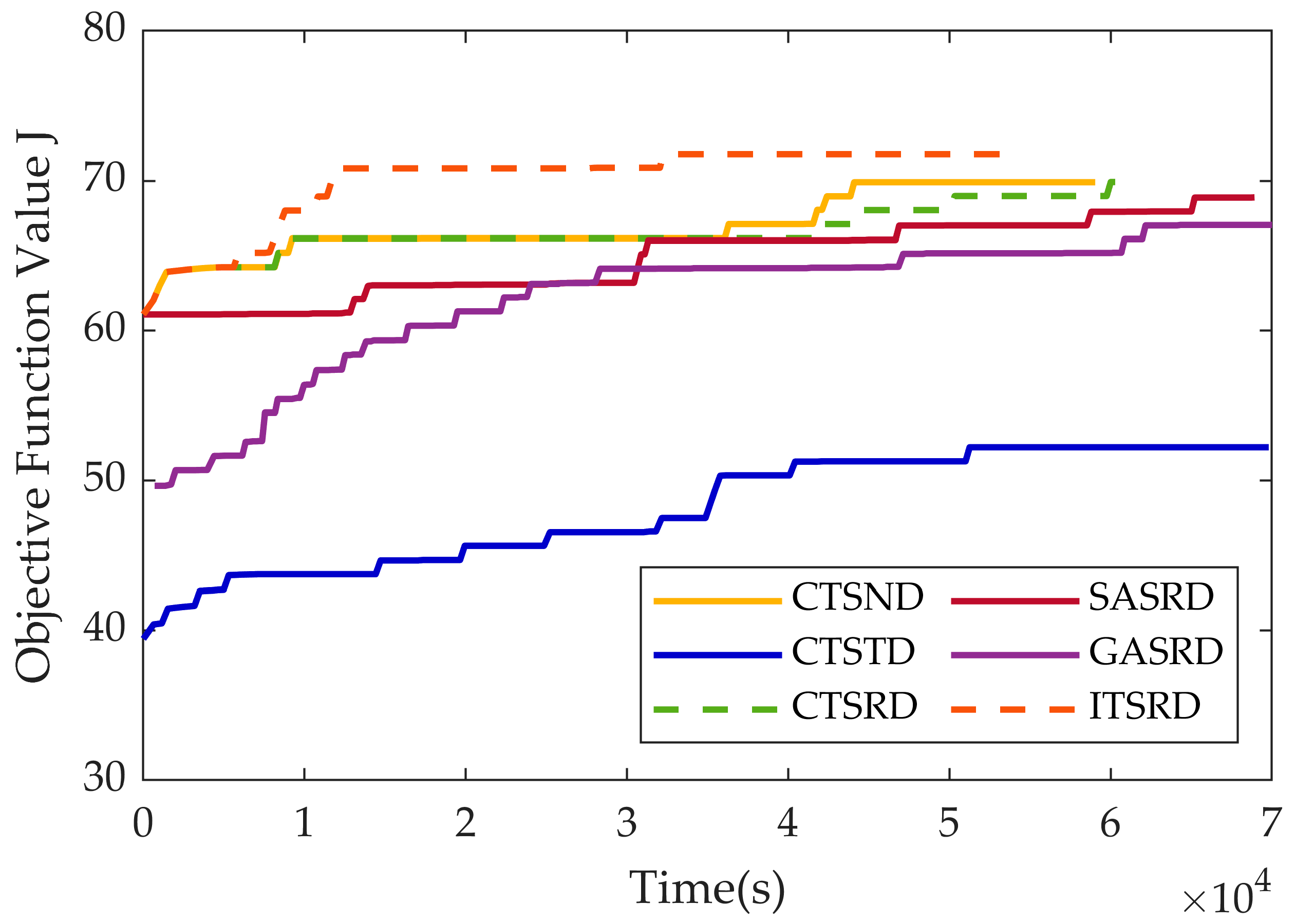
4. Simulation Results
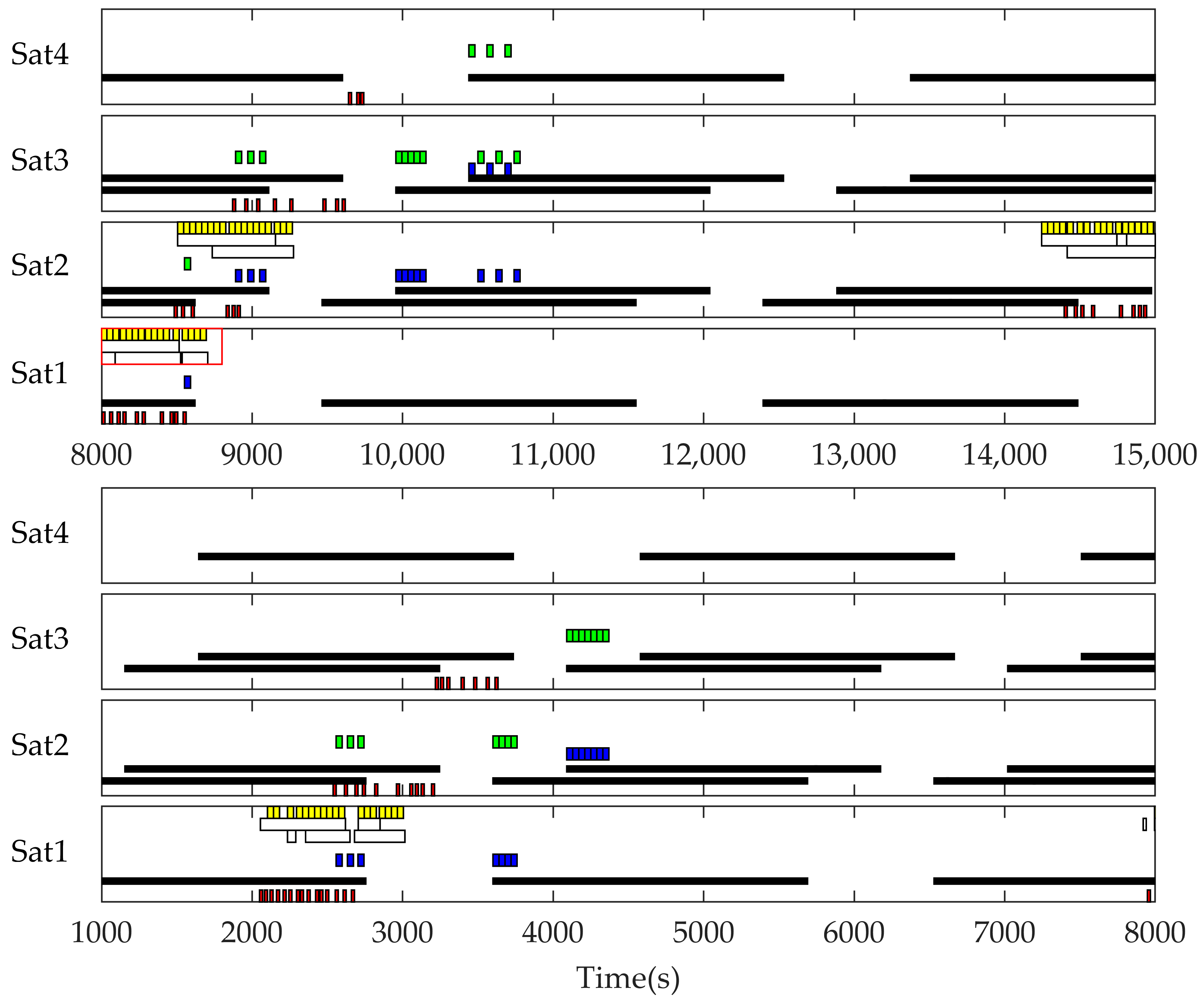
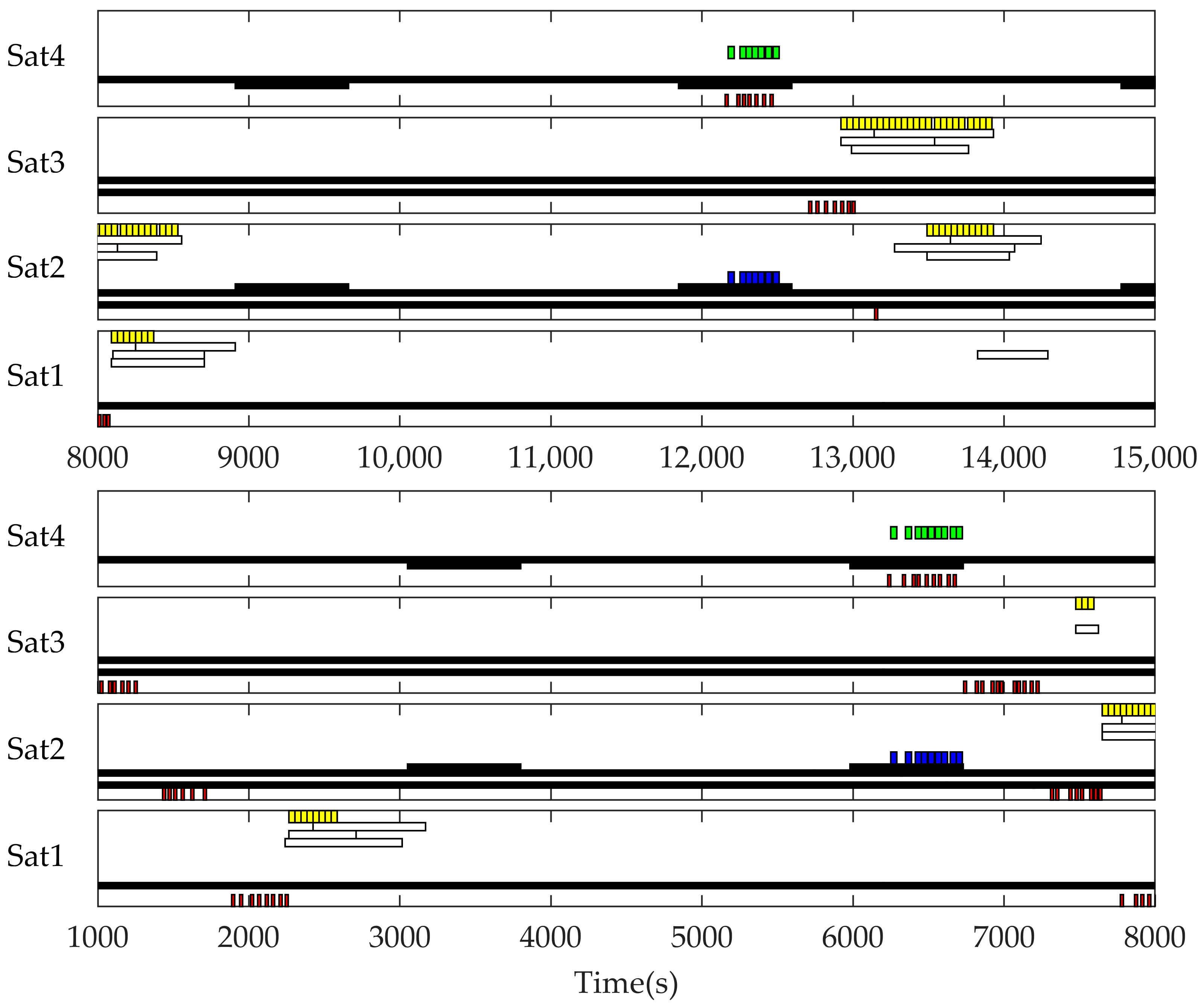
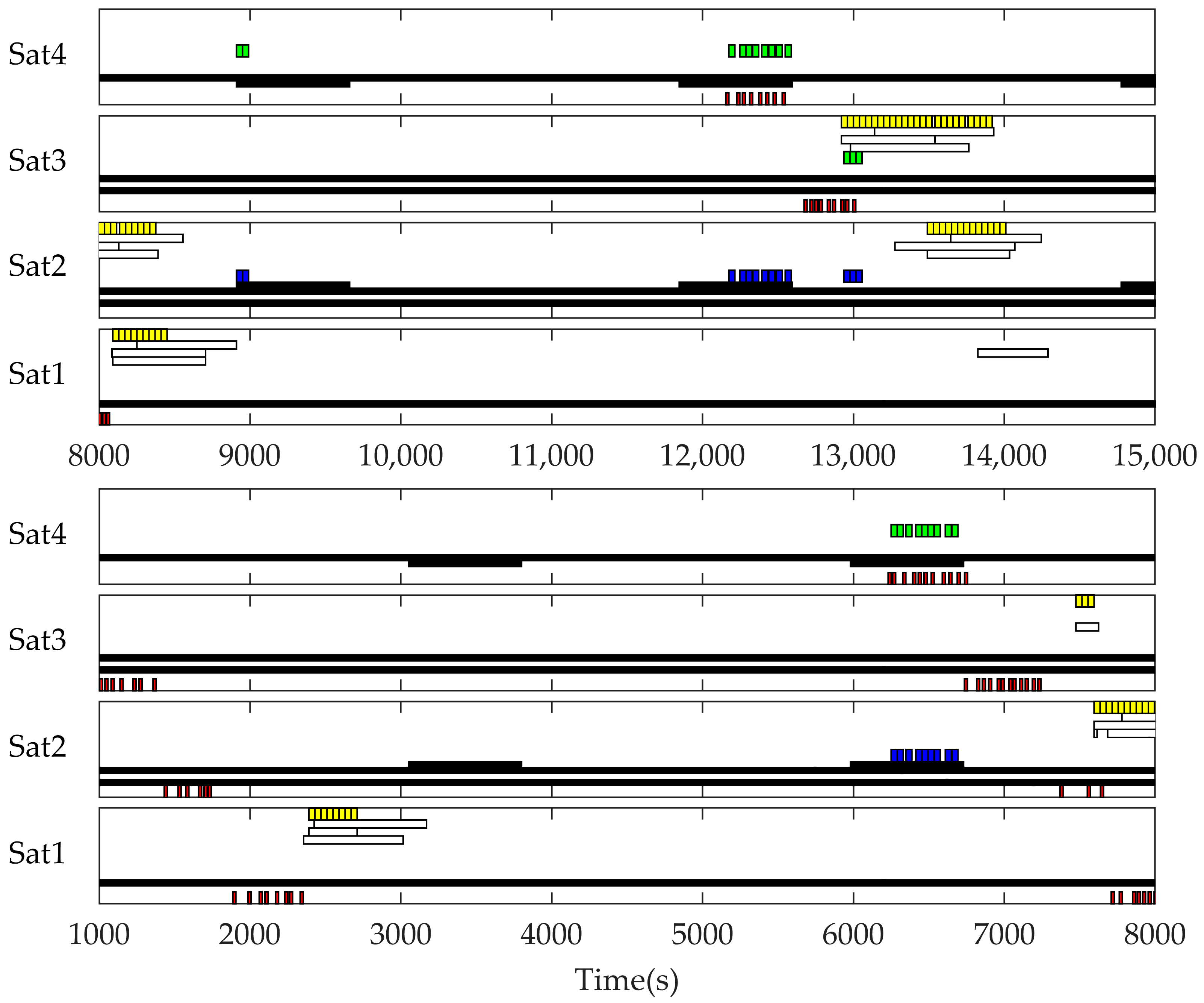
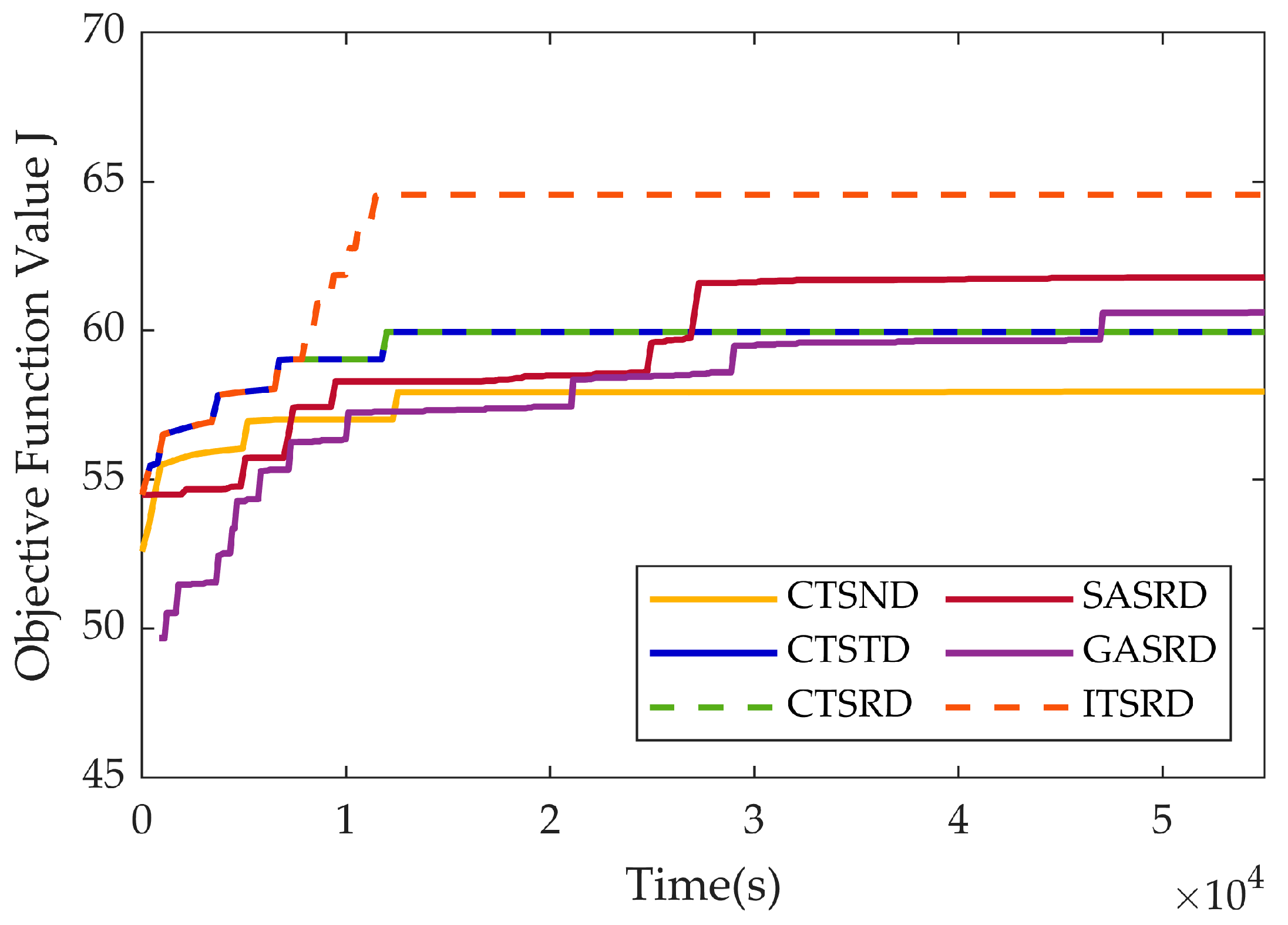
4.1. Scenario 1 Insufficient Electric Energy Scenario
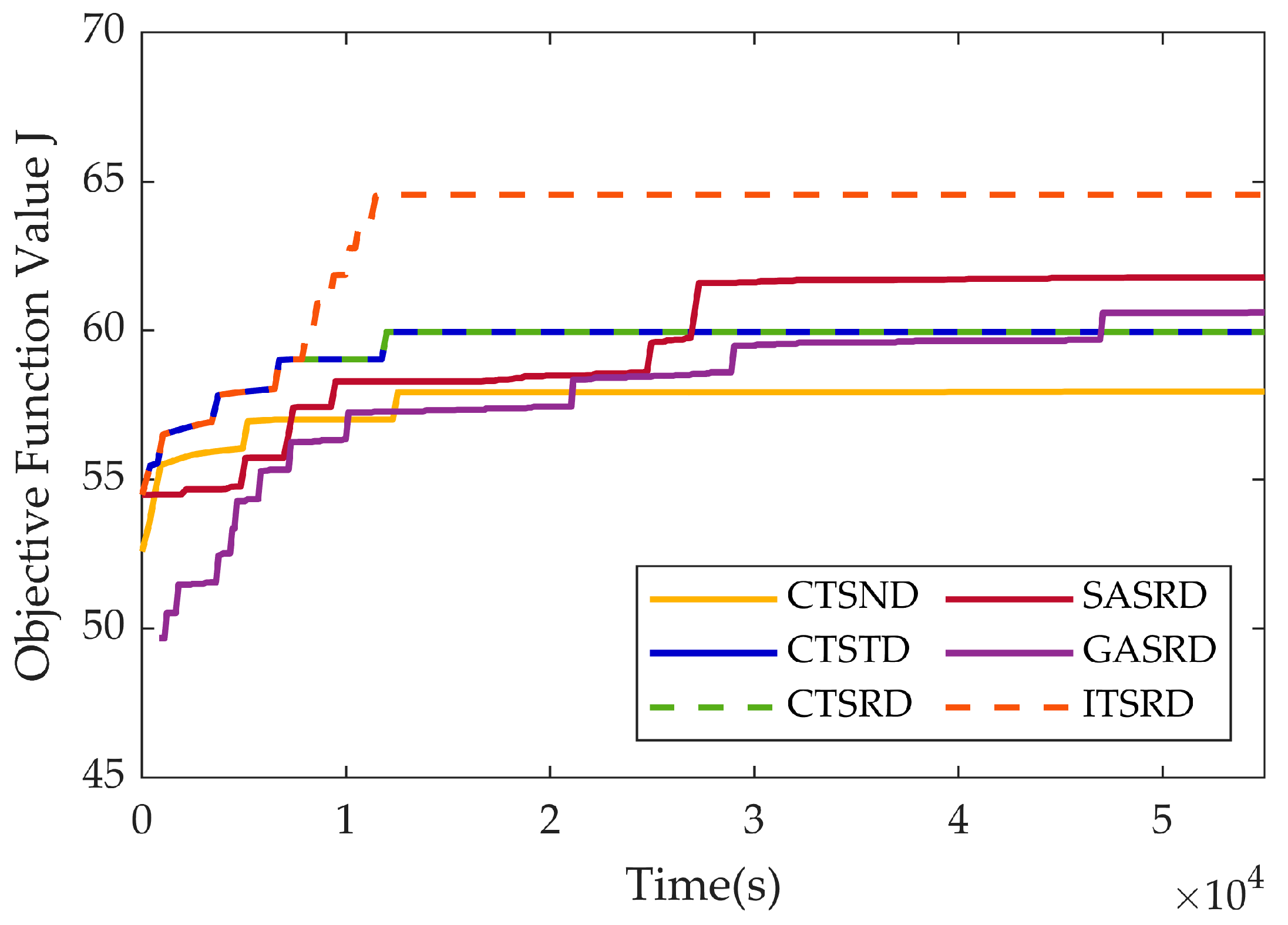
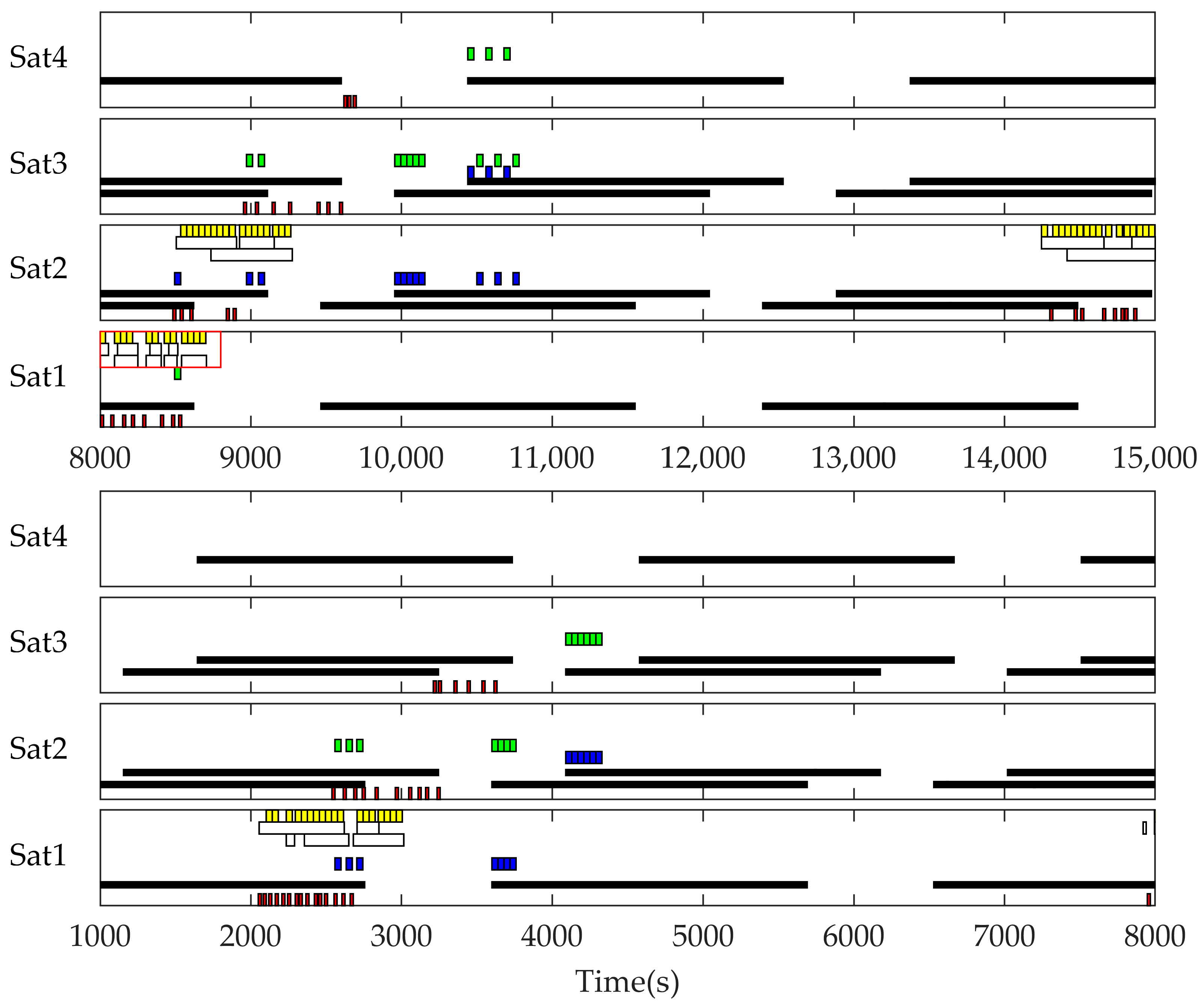
4.2. Scenario 2 Insufficient Data Transmission Resource Scenario
5. Discussion
- The global–local combination methods are also an important development direction for search methods. Combining the advantages of global search methods and local search methods, the multi-satellite observation-relay transmission-downloading coupling scheduling method can be improved;
- Further research can be carried out under different target distributions, ground station distributions, and satellite parameters. Finding out the influence of the parameters of the method on the results under different scenarios. The relationship between the parameters of the algorithm and the adaptive working conditions is explored using system analysis and machine learning in order to enhance the adaptability of the method under different working conditions. In addition, mining the relationship between the parameters of the algorithm and the adaptive scenarios by using system analysis and machine learning methods can enhance the adaptability of the scheduling method in different scenarios.
- Study the scheduling method with a large-scale satellite cluster and a large number of targets so as to alleviate the trade-off between calculation results and calculation efficiency in large-scale problems.
- In the case of increasing data transmission, how to transmit data to the ground station stably and quickly in the conditions of large data transmission volumes and communication interference is also one of our future research directions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gu, X.F.; Tong, X.D. Overview of China Earth Observation Satellite Programs. IEEE Geosci. Remote Sens. Mag. 2015, 3, 113–129. [Google Scholar] [CrossRef]
- Gleyzes, M.A.; Perret, L.; Kubik, P. Pleiades System Architecture and Main Performances. In Proceedings of the 22nd Congress of the International-Society-for-Photogrammetry-and-Remote-Sensing, Melbourne, Australia, 25 August–1 September 2012; pp. 537–542. [Google Scholar]
- WorldView-4. Available online: https://www.eoportal.org/satellite-missions/worldview-4#space-and-hardware-components (accessed on 24 September 2023).
- HJ-1 (Huan Jing-1: Environmental Protection & Disaster Monitoring Constellation). Available online: https://www.eoportal.org/satellite-missions/hj-1 (accessed on 24 September 2023).
- Lin, W.C.; Liao, D.Y.; Liu, C.Y.; Lee, Y.Y. Daily imaging scheduling of an earth observation satellite. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2005, 35, 213–223. [Google Scholar] [CrossRef]
- Nag, S.; Li, A.S.; Merrick, J.H. Scheduling algorithms for rapid imaging using agile Cubesat constellations. Adv. Space Res. 2018, 61, 891–913. [Google Scholar] [CrossRef]
- Zong, P.; Kohani, S. Design of LEO Constellations with Inter-satellite Connects Based on the Performance Evaluation of the Three Constellations SpaceX, OneWeb and Telesat. Korean J. Remote Sens. 2021, 37, 23–40. [Google Scholar] [CrossRef]
- Bensana, E.; Verfaillie, G.; Michelon-Edery, C.; Bataille, N. Dealing with uncertainty when managing an earth observation satellite. In Proceedings of the 5th International Symposium on Artificial Intelligence, Robotics and Automation in Space (ISAIRAS 99), Noordwijk, The Netherlands, 1–3 June 1999; pp. 205–207. [Google Scholar]
- Beaumet, G.; Verfaillie, G.; Charmeau, M.C. Feasibility of Autonomous Decision Making on Board an Agile Earth-Observing Satellite. Comput. Intell. 2011, 27, 123–139. [Google Scholar] [CrossRef]
- Wang, X.-W.; Chen, Z.; Han, C. Scheduling for single agile satellite, redundant targets problem using complex networks theory. Chaos Solitons Fractals 2016, 83, 125–132. [Google Scholar] [CrossRef]
- Cui, K.; Xiang, J.; Zhang, Y. Mission planning optimization of video satellite for ground multi-object staring imaging. Adv. Space Res. 2018, 61, 1476–1489. [Google Scholar] [CrossRef]
- Tangpattanakul, P.; Jozefowiez, N.; Lopez, P. A multi-objective local search heuristic for scheduling Earth observations taken by an agile satellite. Eur. J. Oper. Res. 2015, 245, 542–554. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, L.; Cheng, J.; Zhou, J.; Wang, Y. Task scheduling and attitude planning for agile earth observation satellite with intensive tasks. Aerosp. Sci. Technol. 2019, 90, 23–33. [Google Scholar] [CrossRef]
- Xu, R.; Chen, H.P.; Liang, X.L.; Wang, H.M. Priority-based constructive algorithms for scheduling agile earth observation satellites with total priority maximization. Expert Syst. Appl. 2016, 51, 195–206. [Google Scholar] [CrossRef]
- Wang, P.; Reinelt, G.; Gao, P.; Tan, Y.J. A model, a heuristic and a decision support system to solve the scheduling problem of an earth observing satellite constellation. Comput. Ind. Eng. 2011, 61, 322–335. [Google Scholar] [CrossRef]
- He, L.; Liu, X.L.; Laporte, G.; Chen, Y.W.; Chen, Y.G. An improved adaptive large neighborhood search algorithm for multiple agile satellites scheduling. Comput. Oper. Res. 2018, 100, 12–25. [Google Scholar] [CrossRef]
- Li, Z.L.; Li, X.J. A multi-objective binary-encoding differential evolution algorithm for proactive scheduling of agile earth observation satellites. Adv. Space Res. 2019, 63, 3258–3269. [Google Scholar] [CrossRef]
- Grasset-Bourdel, R.; Flipo, A.; Verfaillie, G. Planning and replanning for a constellation of agile Earth observation satellites. In Proceedings of the 21th International Conference on Automated Planning and Scheduling (ICAPS 2011), Freiburg, Germany, 11–16 June 2011; p. 29. [Google Scholar]
- Cho, D.H.; Kim, J.H.; Choi, H.L.; Ahn, J. Optimization-Based Scheduling Method for Agile Earth-Observing Satellite Constellation. J. Aerosp. Inf. Syst. 2018, 15, 611–626. [Google Scholar] [CrossRef]
- Song, Y.J.; Zhou, Z.Y.; Zhang, Z.S.; Yao, F.; Chen, Y.W. A framework involving MEC: Imaging satellites mission planning. Neural Comput. Appl. 2020, 32, 15329–15340. [Google Scholar] [CrossRef]
- Zhang, J.W.; Xing, L.N. An improved genetic algorithm for the integrated satellite imaging and data transmission scheduling problem. Comput. Oper. Res. 2022, 139, 105626. [Google Scholar] [CrossRef]
- Rojanasoonthon, S.; Bard, J.F.; Reddy, S.D. Algorithms for parallel machine scheduling: A case study of the tracking and data relay satellite system. J. Oper. Res. Soc. 2003, 54, 806–821. [Google Scholar] [CrossRef]
- Karapetyan, D.; Minic, S.M.; Malladi, K.T.; Punnen, A.P. Satellite downlink scheduling problem: A case study. Omega-Int. J. Manage. Sci. 2015, 53, 115–123. [Google Scholar] [CrossRef]
- He, L.J.; Li, J.D.; Sheng, M.; Liu, R.Z.; Guo, K.; Zhou, D. Dynamic Scheduling of Hybrid Tasks With Time Windows in Data Relay Satellite Networks. IEEE Trans. Veh. Technol. 2019, 68, 4989–5004. [Google Scholar] [CrossRef]
- Song, Y.; Xing, L.; Wang, M.; Yi, Y.; Xiang, W.; Zhang, Z. A knowledge-based evolutionary algorithm for relay satellite system mission scheduling problem. Comput. Ind. Eng. 2020, 150, 106830. [Google Scholar] [CrossRef]
- Qi, X. Research on Routing Algorithm and Topology Control Strategy of LEO Satellite Networks. Ph.D. Thesis, Xidian University, Xi’an, China, 2022. [Google Scholar]
- Li, Y. Research on Satellite-Ground Station Data Transmission Scheduling Models and Algorithms. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2008. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Zhang, G.; Li, X.; Hu, G.; Zhang, Z.; An, J.; Man, W. Mission Planning Issues of Imaging Satellites: Summary, Discussion, and Prospects. Int. J. Aerosp. Eng. 2021, 2021, 7819105. [Google Scholar] [CrossRef]
- Wang, J.J.; Demeulemeester, E.; Qiu, D.S. A pure proactive scheduling algorithm for multiple earth observation satellites under uncertainties of clouds. Comput. Oper. Res. 2016, 74, 1–13. [Google Scholar] [CrossRef]
- Chu, X.G.; Chen, Y.N.; Xing, L.N. A Branch and Bound Algorithm for Agile Earth Observation Satellite Scheduling. Discrete Dyn. Nat. Soc. 2017, 2017, 7345941. [Google Scholar] [CrossRef]
- Chu, X.; Chen, Y.; Tan, Y. An anytime branch and bound algorithm for agile earth observation satellite onboard scheduling. Adv. Space Res. 2017, 60, 2077–2090. [Google Scholar] [CrossRef]
- Peng, G.S.; Song, G.P.; Xing, L.N.; Gunawan, A.; Vansteenwegen, P. An Exact Algorithm for Agile Earth Observation Satellite Scheduling with Time-Dependent Profits. Comput. Oper. Res. 2020, 120, 104946. [Google Scholar] [CrossRef]
- Bunkheila, F.; Ortore, E.; Circi, C. A new algorithm for agile satellite-based acquisition operations. Acta Astronaut. 2016, 123, 121–128. [Google Scholar] [CrossRef]
- Xie, P.; Wang, H.; Chen, Y.N.; Wang, P. A Heuristic Algorithm Based on Temporal Conflict Network for Agile Earth Observing Satellite Scheduling Problem. IEEE Access 2019, 7, 61024–61033. [Google Scholar] [CrossRef]
- Mok, S.H.; Jo, S.; Bang, H.; Leeghim, H. Heuristic-Based Mission Planning for an Agile Earth Observation Satellite. Int. J. Aeronaut. Space Sci. 2019, 20, 781–791. [Google Scholar] [CrossRef]
- Baek, S.-W.; Han, S.-M.; Cho, K.-R.; Lee, D.-W.; Yang, J.-S.; Bainum, P.M.; Kim, H.-D. Development of a scheduling algorithm and GUI for autonomous satellite missions. Acta Astronaut. 2011, 68, 1396–1402. [Google Scholar] [CrossRef]
- Song, B.Y.; Yao, F.; Chen, Y.N.; Chen, Y.G.; Chen, Y.W. A Hybrid Genetic Algorithm for Satellite Image Downlink Scheduling Problem. Discrete Dyn. Nat. Soc. 2018, 2018, 1531452. [Google Scholar] [CrossRef]
- Du, B.; Li, S.; She, Y.C.; Li, W.D.; Liao, H.; Wang, H.F. Area targets observation mission planning of agile satellite considering the drift angle constraint. J. Astron. Telesc. Instrum. Syst. 2018, 4, 047002. [Google Scholar] [CrossRef]
- He, L.; Liu, X.L.; Chen, Y.W.; Xing, L.N.; Liu, K. Hierarchical scheduling for real-time agile satellite task scheduling in a dynamic environment. Adv. Space Res. 2019, 63, 897–912. [Google Scholar] [CrossRef]
- Geng, J.Y.; Geng, J.C. Optimization of New Energy Public Transportation Network Based on Ant Colony Algorithm and Low-Carbon Concept. Wirel. Commun. Mob. Comput. 2022, 2022, 1528211. [Google Scholar] [CrossRef]
- Wu, G.H.; Pedrycz, W.; Li, H.F.; Ma, M.H.; Liu, J. Coordinated Planning of Heterogeneous Earth Observation Resources. IEEE Trans. Syst. Man Cybern.-Syst. 2016, 46, 109–125. [Google Scholar] [CrossRef]
- Han, C.; Gu, Y.; Wu, G.H.; Wang, X.W. Simulated Annealing-Based Heuristic for Multiple Agile Satellites Scheduling Under Cloud Coverage Uncertainty. IEEE Trans. Syst. Man Cybern.-Syst. 2023, 53, 2863–2874. [Google Scholar] [CrossRef]
- Karabin, M.; Stuart, S.J. Simulated annealing with adaptive cooling rates. J. Chem. Phys. 2020, 153, 114103. [Google Scholar] [CrossRef]
- He, R. Research on Imaging Reconnaissance Satellite Scheduling Problem. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2004. [Google Scholar]
- Vasquez, M.; Hao, J.K. A “logic-constrained” knapsack formulation and a tabu algorithm for the daily photograph scheduling of an earth observation satellite. Comput. Optim. Appl. 2001, 20, 137–157. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Laporte, G. Maximizing the value of an Earth observation satellite orbit. J. Oper. Res. Soc. 2005, 56, 962–968. [Google Scholar] [CrossRef]
- Zufferey, N.; Amstutz, P.; Giaccari, P. Graph colouring approaches for a satellite range scheduling problem. J. Sched. 2008, 11, 263–277. [Google Scholar] [CrossRef]
- Lin, W.M.; Cheng, F.S.; Tsay, M.T. An improved tabu search for economic dispatch with multiple minima. IEEE Trans. Power Syst. 2002, 17, 108–112. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, S.X.; Wu, Z.L.; Wang, Y.H. Motion planning for multi-HUG formation in an environment with obstacles. Ocean Eng. 2011, 38, 2262–2269. [Google Scholar] [CrossRef]
- Montiel, O.; Sepulveda, R.; Orozco-Rosas, U. Optimal Path Planning Generation for Mobile Robots using Parallel Evolutionary Artificial Potential Field. J. Intell. Robot. Syst. 2015, 79, 237–257. [Google Scholar] [CrossRef]
- Zhou, Z.Y.; Wang, J.J.; Zhu, Z.F.; Yang, D.H.; Wu, J. Tangent navigated robot path planning strategy using particle swarm optimized artificial potential field. Optik 2018, 158, 639–651. [Google Scholar] [CrossRef]
- Song, J.; Hao, C.; Su, J.C. Path planning for unmanned surface vehicle based on predictive artificial potential field. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420918461. [Google Scholar] [CrossRef]
- He, C.Y.; Dong, Y.F.; Li, H.J.; Liew, Y. Reasoning-Based Scheduling Method for Agile Earth Observation Satellite with Multi-Subsystem Coupling. Remote Sens. 2023, 15, 1577. [Google Scholar] [CrossRef]
- Rojanasoonthon, S.; Bard, J. A GRASP for parallel machine scheduling with time windows. Inf. J. Comput. 2005, 17, 32–51. [Google Scholar] [CrossRef]
- He, R.; Li, J.; Yao, F.; Xing, L. Imaging Satellite Mission Planning Technology; Science Press: Beijing, China, 2011. [Google Scholar]
- Liu, Y.; Ma, L.; Zhang, H.; Wei, X. Intelligent Optimization Algorithm; Shanghai People’s Publishing House: Shanghai, China, 2019. [Google Scholar]
- Zhao, J.; Yang, F. Agile Satellite; National Defense Industry Press: Beijing, China, 2021. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning |
|---|---|
| nt | The number of targets |
| nr | The number of satellites |
| ns | The number of ground stations |
| i, j | The index of targets |
| k, l | The index of satellites |
| m | The index of ground stations |
| ts, te | The start time and end time of the scheduling |
| towskio, towekio | Satellite k’s start time and end time for the oth observation time window of target i, with the total number of observation time windows being nowki |
| trwsklp, trweklp | Satellite k’s start time and end time for the pth inter-satellite data transmission time window to satellite l. The total number of inter-satellite data transmission time windows is nrwkl, and the windows between two satellites are mutual; thus, nrwkl = nrwlk, trwsklp = trwslkp, trweklp = trwelkp. |
| tdwskmq, tdwekmq | Satellite k’s start time and end time for the qth satellite-ground data transmission time window to ground station m. The total number of satellite-ground data transmission time windows is ndwkm. |
| toski, toeki | Satellite k’s observation start time and end time for target i. |
| tdskmi, tdekmi | Satellite k’s start time and end time for transmitting observation data of target i to ground station m. |
| trOutskli, trOutekli | Satellite k’s start time and end time for transmitting observation data of target i to satellite l. The transmitting direction is satellite k to satellite, |
| trInskli, trInekli | Satellite l’s start time and end time for receiving data of target i from satellite k. The transmitting direction is satellite k to satellite l. The transmission time of satellite k for transmitting observation data of target i to satellite l is the same as the time when satellite l receives target i’s observation data from satellite k, i.e., trOutskli = trInskli, and trOutekli = trInekli. |
| The observation time of single target | |
| The attitude maneuver time required for observation missions’ attitude transition of satellite k | |
| The device switching time between two inter-satellite data transmission missions to different satellites of satellite k | |
| The device switching time between two data downloading missions to different ground stations of satellite k | |
| Wk, WkTotal | Satellite k’s the available electrical energy and satellite k’s electrical energy capacity of the battery. |
| Mk, MkTotal | Satellite k’s occupied memory capacity and satellite k’s total memory capacity. |
| Satellite No | Semi-Major Axis (m) | Eccentricity | Inclination (°) | RAAN (°) | Argument of Perigee (°) | True Anomaly (°) |
|---|---|---|---|---|---|---|
| 1 | 7,028,140 | 0 | 97.9908 | 40.348 | 0 | 0 |
| 2 | 7,028,140 | 0 | 97.9908 | 80.348 | 0 | 30 |
| 3 | 7,028,140 | 0 | 97.9908 | 120.348 | 0 | 60 |
| 4 | 7,028,140 | 0 | 97.9908 | 160.348 | 0 | 90 |
| Parameter Name | Parameter Value |
|---|---|
| Attitude Maneuver Calculate Method | Trapezoidal Method |
| Max Attitude Maneuver Angular Velocity | 1°/s |
| Max Attitude Maneuver Angular Acceleration | 0.5°/s2 |
| Max Maneuvering Range Half-Cone Angle | 45° |
| Antenna Coverage Half-Cone Angle | 70° |
| Storage Capacity | 1000 Gbit |
| Camera’s Data Generation Rate | 2 Gbps |
| Satellite-Satellite Data Transmission Rate | 1 Gbps |
| Satellite-Ground Station Data Transmission Rate | 1 Gbps |
| Battery Electrical Energy Capacity | 5 × 106 J |
| Battery Initial Electrical Energy | 1 × 106 J |
| Max Charging Electrical Power of Solar Arrays | 1 kW |
| Camera Electrical Power | 1 kW |
| Satellite-Satellite Data Transmission Devices Electrical Power | 0.5 kW |
| Satellite-Ground Station Data Transmission Devices Electrical Power | 0.5 kW |
| Satellite Attitude Maneuver Electrical Power | 0.2 kW |
| Satellite Normal Electrical Power | 0.55 kW |
| Observation time of a single target | 20 s |
| Optimal Solution Objective Function Value | Optimal Solution Iteration Time (s) | |||||
|---|---|---|---|---|---|---|
| Method | Max | Min | Average | Max | Min | Average |
| CTSND | 73.06 | 67.70 | 70.56 | 53,449.45 | 43,823.98 | 47,950.01 |
| CTSTD | 61.52 | 52.24 | 56.68 | 62,552.34 | 29,555.25 | 48,103.63 |
| CTSRD 1 | 73.06 | 67.70 | 70.20 | 60,007.70 | 36,706.24 | 47,109.22 |
| SASRD | 72.87 | 64.82 | 68.59 | 68,923.34 | 51,544.14 | 61,194.55 |
| GASRD | 69.81 | 63.58 | 67.13 | 77,119.22 | 56,474.78 | 64,570.52 |
| ITSRD 2 | 74.80 | 69.45 | 72.88 | 40,172.14 | 22,252.50 | 32,140.57 |
| Satellite No | Semi-Major Axis (m) | Eccentricity | Inclination (°) | RAAN (°) | Argument of Perigee (°) | True Anomaly (°) |
|---|---|---|---|---|---|---|
| 1 | 7,028,140 | 0 | 97.9908 | 40.348 | 0 | 0 |
| 2 | 7,028,140 | 0 | 97.9908 | 80.348 | 0 | −30 |
| 3 | 7,028,140 | 0 | 97.9908 | 120.348 | 0 | −60 |
| 4 | 7,028,140 | 0 | 97.9908 | 160.348 | 0 | −90 |
| Parameter Name | Parameter Value |
|---|---|
| Attitude Maneuver Calculate Method | Trapezoidal Method |
| Max Attitude Maneuver Angular Velocity | 1°/s |
| Max Attitude Maneuver Angular Acceleration | 0.5°/s2 |
| Max Maneuvering Range Half-Cone Angle | 45° |
| Antenna Coverage Half-Cone Angle | 70° |
| Storage Capacity | 500 Gbit |
| Camera’s Data Generation Rate | 2 Gbps |
| Satellite-Satellite Data Transmission Rate | 1 Gbps |
| Satellite-Ground Station Data Transmission Rate | 1 Gbps |
| Battery Electrical Energy Capacity | 5 × 106 J |
| Battery Initial Electrical Energy | 5 × 106 J |
| Max Charging Electrical Power of Solar Arrays | 1 kW |
| Camera Electrical Power | 1 kW |
| Satellite-Satellite Data Transmission Devices Electrical Power | 0.5 kW |
| Satellite-Ground Station Data Transmission Devices Electrical Power | 0.5 kW |
| Satellite Attitude Maneuver Electrical Power | 0.2 kW |
| Satellite Normal Electrical Power | 0.55 kW |
| Observation time of a single target | 20 s |
| Optimal Solution Objective Function Value | Optimal Solution Iteration Time(s) | |||||
|---|---|---|---|---|---|---|
| Method | Max | Min | Average | Max | Min | Average |
| CTSND | 60.19 | 55.31 | 58.03 | 47,471.11 | 32,533.38 | 42,458.55 |
| CTSTD | 64.87 | 59.21 | 61.52 | 52,480.11 | 11,987.33 | 39,925.27 |
| CTSRD 1 | 64.87 | 59.21 | 61.52 | 52,510.30 | 11,987.42 | 39,951.82 |
| SASRD | 64.75 | 59.28 | 61.99 | 56,374.09 | 40,695.00 | 49,539.53 |
| GASRD | 65.64 | 59.46 | 62.37 | 68,194.30 | 49,960.36 | 61,536.70 |
| ITSRD 2 | 67.67 | 63.20 | 64.86 | 51,163.97 | 11,726.50 | 30,114.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Dong, Y. Multi-Satellite Observation-Relay Transmission-Downloading Coupling Scheduling Method. Remote Sens. 2023, 15, 5639. https://doi.org/10.3390/rs15245639
He C, Dong Y. Multi-Satellite Observation-Relay Transmission-Downloading Coupling Scheduling Method. Remote Sensing. 2023; 15(24):5639. https://doi.org/10.3390/rs15245639
Chicago/Turabian StyleHe, Changyuan, and Yunfeng Dong. 2023. "Multi-Satellite Observation-Relay Transmission-Downloading Coupling Scheduling Method" Remote Sensing 15, no. 24: 5639. https://doi.org/10.3390/rs15245639
APA StyleHe, C., & Dong, Y. (2023). Multi-Satellite Observation-Relay Transmission-Downloading Coupling Scheduling Method. Remote Sensing, 15(24), 5639. https://doi.org/10.3390/rs15245639