1. Introduction
Waves are routinely measured using wave buoys, and there are many of these around the world’s coasts, with a few further offshore. These provide very useful information for wave model and satellite algorithm development, calibration, and validation and also more locally for activities such as shipping, sailing, coastal recreational activities, coastal erosion, and sediment transport studies and to inform offshore engineering operations such as oil and gas and wind farms. Waves interact with and are modified by currents and bathymetry, and these interactions can become more complex closer to the coast, where waters are shallower and coastal topography can be very variable. Buoys are usually single-point measurements in particular areas of interest and cannot capture the likely spatial variability in the wave field. Waves are also measured from satellites, which are able to measure spatial variations in waves, but not usually with the time resolution needed to resolve developments associated with local storms or sea breezes. HF radar systems, which are normally located on the coast, measure the signal backscattered from ocean waves from near their location to tens of kilometres offshore in near-real-time. This signal carries information about surface currents because they change the phase speed of ocean waves, which induces a Doppler shift in the signal, which can be easily measured. HF radar systems measuring this property are now a routine part of many operational monitoring systems around the world [
1,
2,
3,
4]. The signal also carries information about the ocean wave directional spectrum, but this part of the signal is weaker and extracting quantitative measurements much more difficult. However, if this information can be obtained with sufficient accuracy and reliability, it will add significant value to the spatial measurement capabilities of these radars and provide many more applications for this technology.
The potential for wave measurement with HF radar was first established by Barrick and Weber [
5,
6,
7]. They developed a first- and second-order theory of electromagnetic scattering from moving ocean waves, which led to non-linear integral equations relating the ocean wave directional spectrum to the radar power (known as Doppler) spectrum. The first-order signal provides surface current measurements. Wave measurements can be obtained by inverting the second-order equations. There are two immediate problems: how to ensure that the radar signal has sufficient signal-to-noise (at the locations where wave measurement is required) to clearly identify the second-order part of the Doppler spectrum; non-linear integral equations cannot be inverted accurately without imposing additional conditions. The first problem has two parts: radar design and operating parameters; noise, interference, and propagation conditions. Although the latter need to be considered in the radar design and parameter selection process, they will still influence performance and cannot be completely designed away. Most HF radars in recent years use FMCW modulation, either continuous (e.g., WERA [
8], G-HFDR) or interrupted (FMICW, e.g., SeaSonde [
9], Pisces [
10]), which minimises the impact of interference compared to the pulsed radars used in earlier work. The signal from different ranges is determined using an FFT [
11]. FMICW allows the transmitter and receiver to be co-located (in the continuous case, self-interference has to be avoided), and higher powers can be used to give longer ranges, although maximum power levels are subject to radio frequency licensing agreements. The operating frequency determines both the likely maximum range for both wave and current measurements (low radio frequency, longer range, and vice versa, with the maximum range at either frequency also reduced due to propagation losses in higher seas) and also wave measurement ability (low radio frequencies can measure higher waves and high frequencies lower waves) [
12]. Other factors such as the physical footprint of the radar system can be more important than wave measurement potential when deciding on a radar system, particularly when the priority is for surface current measurement. So, many systems in use around the world are so-called direction-finding radars of the SeaSonde type. Direction finding is used to obtain the spatial distribution of surface currents, but cannot be used for wave measurement. The inversion process is even more complicated for these radars since the second-order equations are convolved with the broad-beam antenna pattern obtained from a monopole and two loop antennas mounted on a single pole. Wave measurement solutions assume that the wave spectrum is uniform around constant range rings, which can be difficult to justify in coastal waters. So-called phased array radars (WERA, G-HFDR, Pisces) use an array of antennas phased to provide data in particular directions, and thus, backscatter from patches or cells (often of the order of 1 km × 1 km) in the coverage area can be identified; assuming these are small enough so the directional spectrum is constant across the cell, the second-order equations apply without additional complexity.
The methods to obtain wave measurements can essentially be divided into three main strands:
Empirical algorithms using buoy data and regression to obtain estimates for significant wave height and, sometimes, additional parameters, e.g., [
13,
14,
15];
Algorithms building on the work of Barrick [
16] for the frequency spectrum and Lipa [
17,
18] for narrow-band swell, both of which were based on a linearisation of the equations to derive closed-form expressions [
6];
Numerical inversion methods using model fitting [
9] (the method normally used with SeaSonde radars); regularisation [
19,
20]; singular-value decomposition [
21]; Bayesian methods [
22]; optimisation [
23]; neural networks [
24]; and constrained iteration [
25,
26].
This paper will look at the performance of the constrained iteration numerical inversion method, which is the method used in the software supplied by Seaview Sensing and is hereafter referred to as SV. This method has been tested at many different locations with different radars and operating frequencies [
27]. Two recent developments and a paper [
28] building on [
16,
17] (item 2 above) have motivated the new results presented in this paper. The original Seaview software package was written to analyse data from two radars looking at the same area of sea from different directions. Most early radars operated in this way, and two radars are needed to measure surface current vectors. Wyatt [
27,
29] showed that two radars are also required to accurately measure waves. This was less clear in Barrick’s original work [
6], although it was pointed out in [
30] that his expression was limited to the case of waves travelling perpendicular to the radar direction. As a result, attempts to use Barrick’s formulation usually involve a calibration to match local buoy wave heights, e.g., [
31,
32]. The SV software package has now been restructured to allow for inversion using one to
N radars (and also bistatic configurations, although this has yet to be fully implemented and tested); so, a quantitative assessment of single-radar inversion can be obtained, and the software can also be used in the context of radar networks, albeit still being restricted to data with sufficient signal-to-noise. The second development is the ability to separate and identify wind sea and swell components in directional spectra [
33]. The SV method makes no assumptions about the shape of the directional spectrum over a frequency band with an upper limit that depends primarily on the radio frequency. Beyond this, a Pierson–Moskowitz spectrum is assumed with a
directional distribution [
34], where the parameters:
and wind (or short wave) direction,
, are determined from the radar data using a maximum likelihood method [
35]. Bi- and multi-modal spectra, in frequency and or direction, can be measured. The work presented in this paper used the SV core inversion version
.
There is one empirically based parameter used in the SV method. This is used to parameterise high-order non-linearities not accounted for in the Barrick equations, but identified by [
36,
37]. This effect can be approximated by a wave-height-dependent scaling of the first-order amplitude. The scaling used takes the form
times the amplitude of first-order peak, where
is the radar wavenumber and
M is the empirically determined parameter in the range
.
implies no scaling. For dual-radar inversions
is used since this gave the best results when tested with the November data set discussed in this paper. The theory suggests that there should be a directional impact on this scaling that has not yet been taken into account. This is more apparent with single-radar inversions and is discussed in
Section 3.2 below.
Al-Attabi et al. [
28] (AlA) used Barrick’s method [
16] for the wind–sea component combined with a directional wave model,
, where
is the spreading parameter, which is assumed to depend on the wave frequency relative to the peak as determined empirically by [
34]. They determined the peak direction at each frequency,
, from second-order Doppler ratios assuming a
, where
is the assumed constant spreading parameter. A similar model is used to estimate wind direction from the ratio of the first-order peaks. They obtained the swell component using [
18]. To implement this approach, a swell–wind separation frequency is required. They used a wave age formulation, which depends on an externally provided wind speed. If the wind speed is not available, a fixed partition frequency of 0.12 Hz is used. The swell component obtained is removed if its contribution to the Doppler spectrum relative to the wind–wave contribution is less than a specified threshold, determined by trial and error. The methods were applied to dual-radar data where these were available, otherwise to single-radar data.
AlA was tested using data from the University of Plymouth WERA radars [
38,
39] during April 2012. The radars use a frequency of about
MHz. Previous tests of the Seaview method have used data from the same system for November 2012 [
27]. In this paper, both data sets were analysed. The April data were used to compare with [
28]. The University of Plymouth radars are sited on the North coast of Cornwall, U.K., providing metocean measurements in a region of the Celtic Sea of great current interest for wave power and offshore floating wind power applications.
The aim of this paper was to provide more evidence of the good accuracy and availability of detailed wave measurements using phased array radars with the SV method to encourage greater use of this technology. In particular, the latest version of the software package, , both for dual- and, for the first time, for single-radar systems was validated. Another aim was to promote the use of a range of statistics, not just, e.g., the correlation and/or root-mean-squared difference, and clarity in the way these are calculated, when assessing wave measurement performance and comparing with other methods.
In the next section, we present the data sets and discuss the statistical methods used to evaluate the performance of the wave measurement methods.
Section 3 presents the results, followed by the discussion and conclusions.
5. Discussion
This paper was originally motivated by the paper of Al-Attabi [
28], which extended the work of Barrick to provide a hybrid swell wind–sea method. That work is in the tradition of simplified inversion methods, which avoid the complexity of inverting the integral equations. One of our aims was to show that full integral inversion, as implemented in the new version,
, of the Seaview Sensing software, continues to provide more-accurate results, and the statistics in
Table 3 and
Table 5 demonstrate that. In the process of performing that comparison, it became clear that accurate specification of the statistics used to evaluate performance is needed to ensure the comparison is consistent. Previous work and a literature search revealed a number of different statistics used to evaluate wave measurement and model performance, so the scope of this paper was extended to see whether a particular statistic or set of statistics provided a more-reliable measure of performance so that this can be recommended for future use. This is discussed below. We also noted that noise levels are measured in different ways, and so, signal-to-noise criteria are not always equivalent.
The comparisons between radar and buoy wave measurements presented in
Section 3 used a 5 dB second-order signal-to-noise threshold for the radar data, as discussed in
Section 2.1. Additional quality criteria are normally applied by Seaview when displaying data or assessing performance. These are listed in
Table 9 together with their defaults. The inversion residual measures the difference between the measured Doppler spectra and the Doppler spectra obtained by integrating Barrick’s equations [
6] using the wave measurement obtained at each inversion iteration. This number decreases as the iteration progresses until it is small enough that convergence is deemed to have been achieved. Non-convergent behaviour indicates that the radar data quality is poor and the inversion fails. The
criteria are derived from the ratio of the first-order Bragg frequency to the peak frequency of a Pierson–Moskowitz spectrum corresponding to the radar-measured significant wave height (
[
59]). If that ratio is less than one, corresponding to
, the radio frequency used is too low to measure wind waves. The wave criterion uses a ratio threshold of
, so there is a better chance that the first-order Bragg peak is wind driven. The spectrum criterion is for a ratio of
and was found to give more-accurate spectral parameters in earlier work [
12].
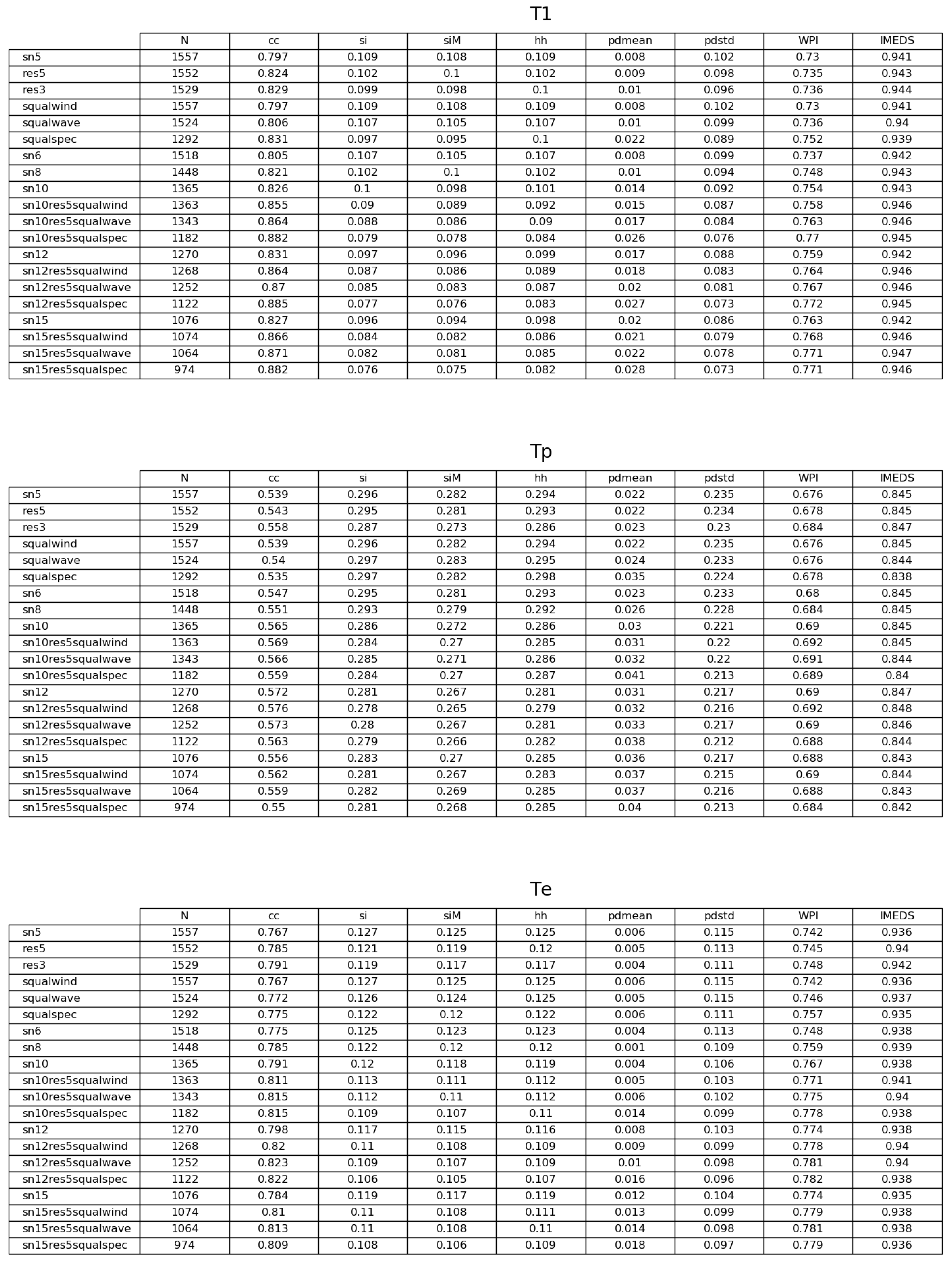
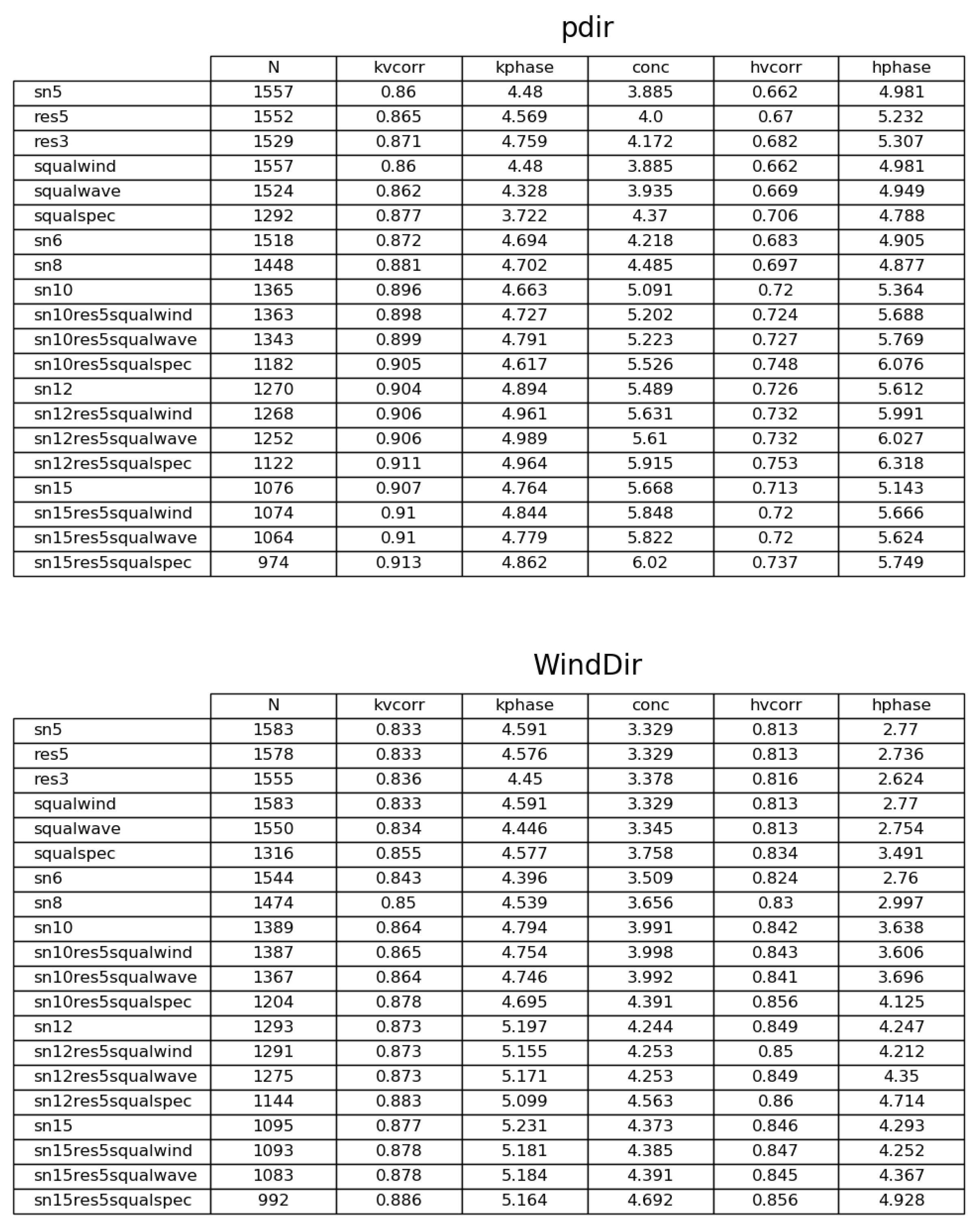
The impact of increasing the second-order signal-to-noise, reducing the inversion residual, and applying the
thresholds, separately and together, on the comparison statistics for
and mean direction is shown in
Figure 13. The results are not really surprising. Tighter thresholds (roughly going down the lists in the figure) reduce the amount of data available for comparison (N) and, in most cases, increase accuracy, i.e., reduce or increase the statistics as appropriate, although the variations in the numbers are quite small. In the case of
, the correlation coefficient and the WPI statistic gave less-clear evidence of increased accuracy. There is some evidence from pdmean and directional phases that the biases actually increase, although the numbers are quite small. Similar results were found for other parameters, as can be seen in
Appendix A, although IMEDS was less consistent in these cases.
Figure 14 shows the Taylor diagram [
60] for the different quality measures. The best performance is obtained for cases where the radar variance is the same as the buoy variance (normalised standard deviation 1), the normalised RMS differences are as small as possible (RMSD on the plot), and the correlation coefficient is as high as possible. The black square indicates equality. The different quality thresholds’ cases are closely clustered, but the zoom on the right of the figure shows the improvement of accuracy with increasing application of the thresholds. The advantage of the Taylor diagram is that it combines information about the correlation, rms errors, and relative variance and provides a clear performance indication. In this case, a 15 dB signal-to-noise ratio, 0.5 residual, and
gave the best result. However, as noted in
Figure 13, this case significantly reduced the amount of available data without significantly increasing the accuracy, so a lower signal-to-noise threshold, perhaps 10 or 12 dB, may be preferred by users, in particular where long-range mapping is required, and a lower threshold than this introduces noise at longer ranges (
Section 4) and, so, is not recommended.
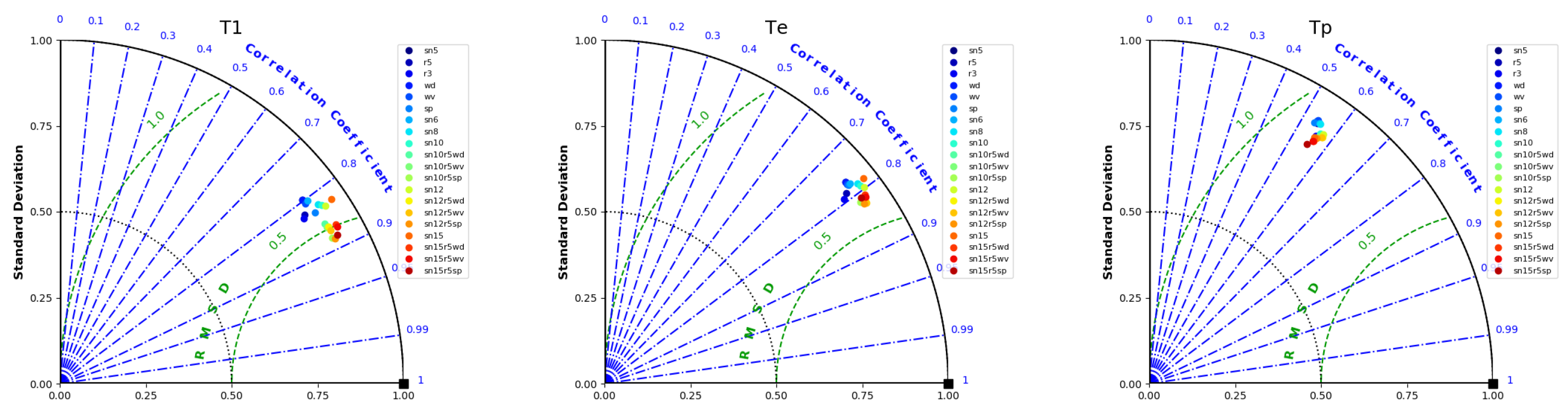
Taylor diagrams for the period parameters are shown in
Figure 15. With the exception of the peak period, which shows little variation, these show the same tendencies as
, although slightly less clearly.
6. Conclusions
This paper is not the first one to present a validation of the SV wave inversion method as was noted in the Introduction. Here, we extended the scope of such validations to include swell and wind–sea partitions, single-radar inversions, and a comprehensive look at the impact of different quality measures. The standard quality measures that have been applied in earlier work were shown to still give the most-accurate results, but the analysis presented suggests that they can be relaxed a little to increase coverage without seriously impacting the accuracy.
The partitioning method to separate wind–sea from swell components in the directional spectrum was mostly successful with good qualitative agreement with the buoy peak periods and directions. However, it is not always possible to identify swell and wind–sea components satisfying the requirements outlined in
Section 3.1.1, so there are fewer swell/wind–sea partitions identified than available directional spectra. Some modifications to the criteria will be investigated, but better radar data quality, or better signal processing strategies to remove interference, sidelobe contamination, etc., are likely to be needed to improve the partition processing.
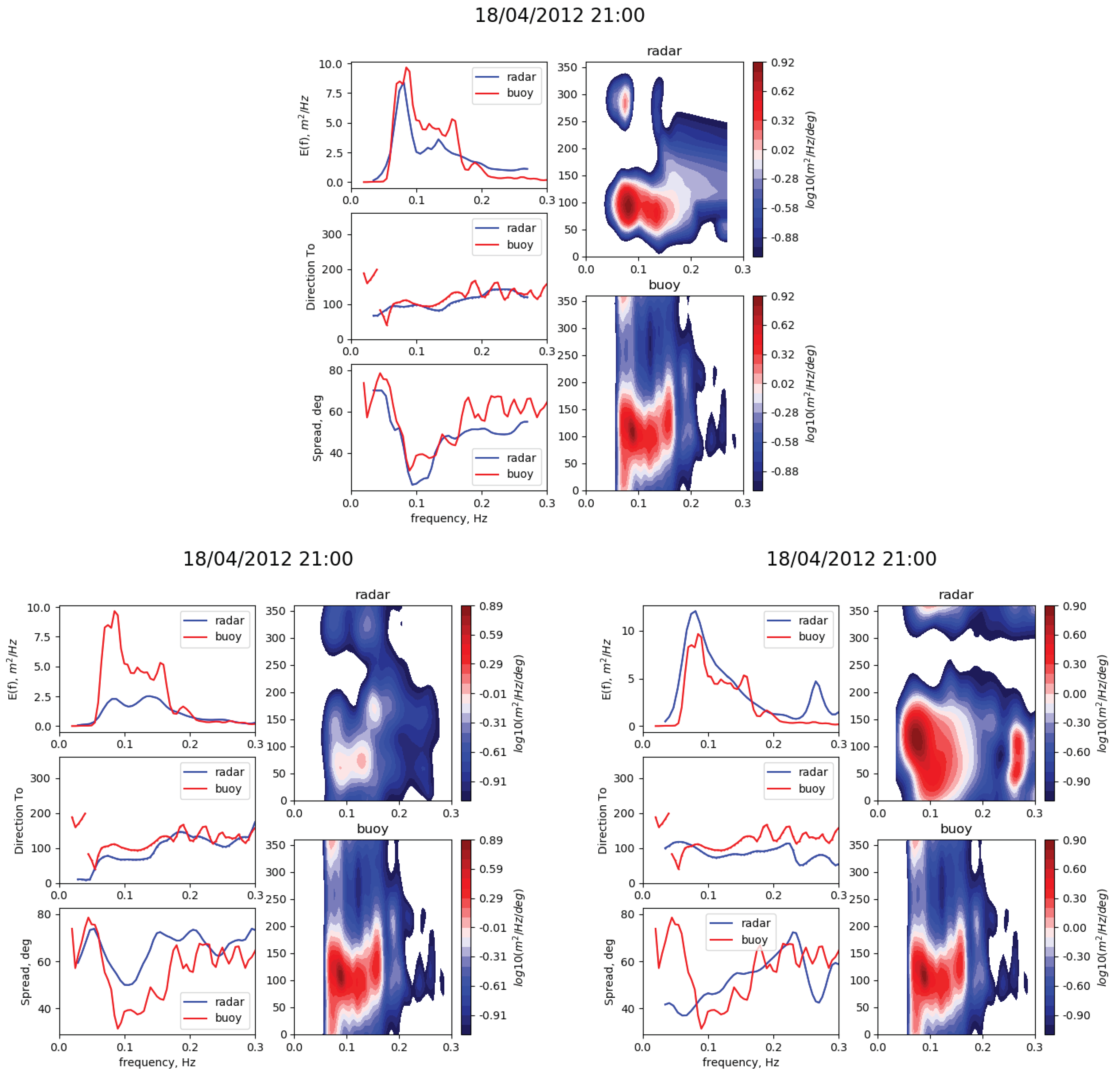
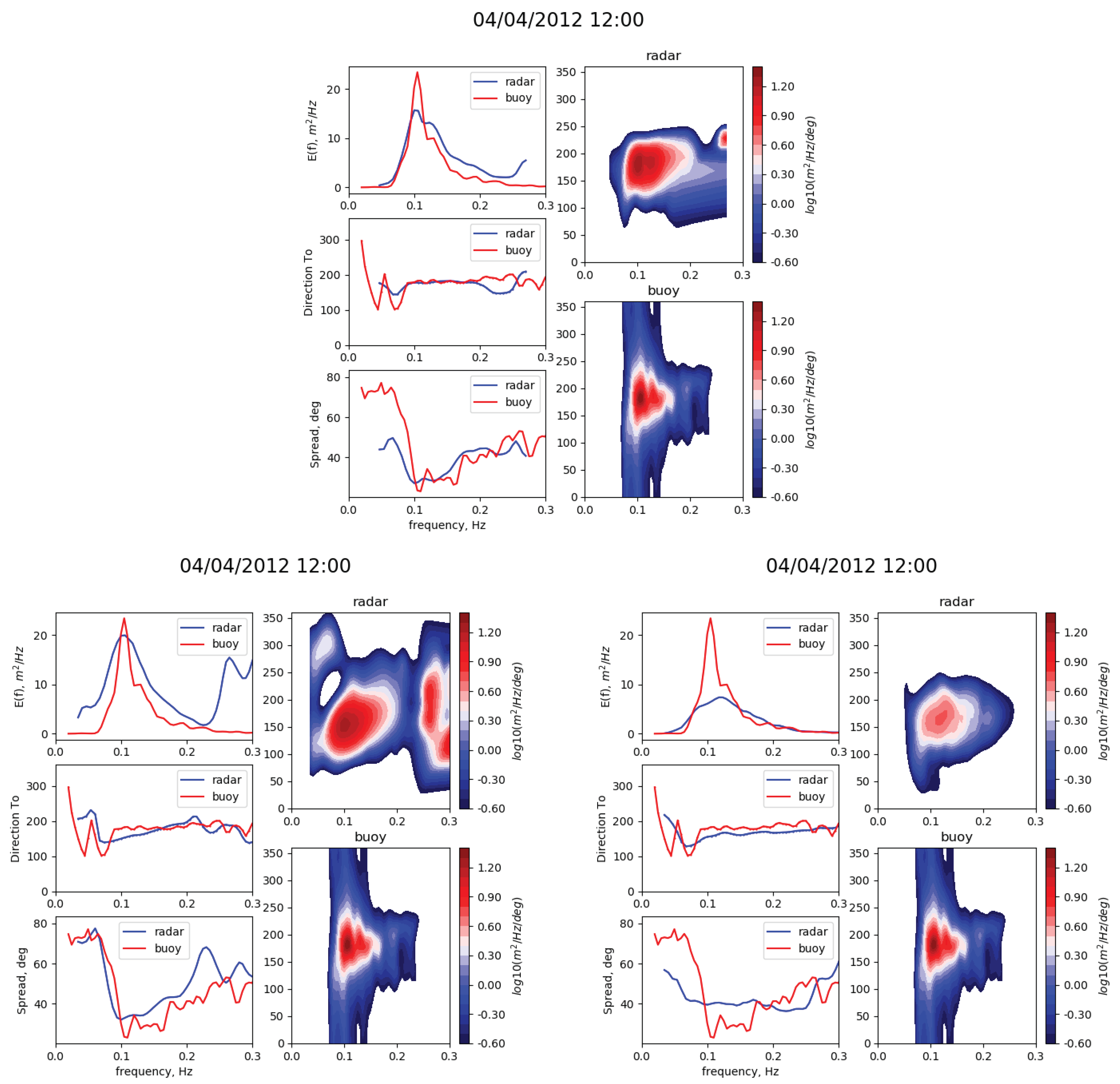
The frequency and direction spectra shown in
Figure 7 and
Figure 8 showed that single-radar inversions do provide some useful information, but are not as accurate as dual-radar inversions. The wave height correction parameter may be the source of some of the differences. The development of a more-rigorous non-linear correction that includes the effect of directionality is needed. Increasing the speed of single-radar inversion, which uses many neighbours and is, thus, slower than dual-radar inversion, is expected to be achieved through parallelisation of the code.
A number of different statistical measures of accuracy were discussed. For amplitude parameters, Taylor diagrams, combining the relative standard deviation, proportional rms difference, and correlation coefficient, seem to give a more-reliable estimate of accuracy relative to wave buoy measurements, and we encourage its use for wave measurement validation, whatever the method used to obtain the wave measurements. The two direction statistics for the correlation and angle difference behaved similarly, but the direct relation between the correlation and explained variance in the Hanson [
56] method is an advantage, so is recommended. Concentration [
55] is also a useful indicator of accuracy. A strong recommendation is that authors provide or reference their formulae for the statistics used.
The motivation for many empirically based methods is to find simple solutions that can be easily applied and are possibly more robust than full inversion methods, which are seen to be too complicated. However, they do involve many assumptions in terms of spectral shape and directional distributions, amongst others. No such assumptions are made in the SV method, apart from the linearising model used for frequencies beyond the inversion range, and, although numerically complex, once installed, it can be run through a server with no manual intervention or as a simple command line. On an HP elitebook laptop, the dual-radar inversion at each cell took about 11 ms, and the whole process took about 40 s for a case with 2939 inverted cells. Near-real-time processing is achievable. In comparison with the AlA method, similar numbers of inversions were made during April, and the accuracy was higher.
This paper provided more evidence for more-widespread use of the wave measurement capability of phased array radar systems. There are differences between buoy and radar measurements, particularly evident in the directional spectra, e.g.,
Figure 9 and
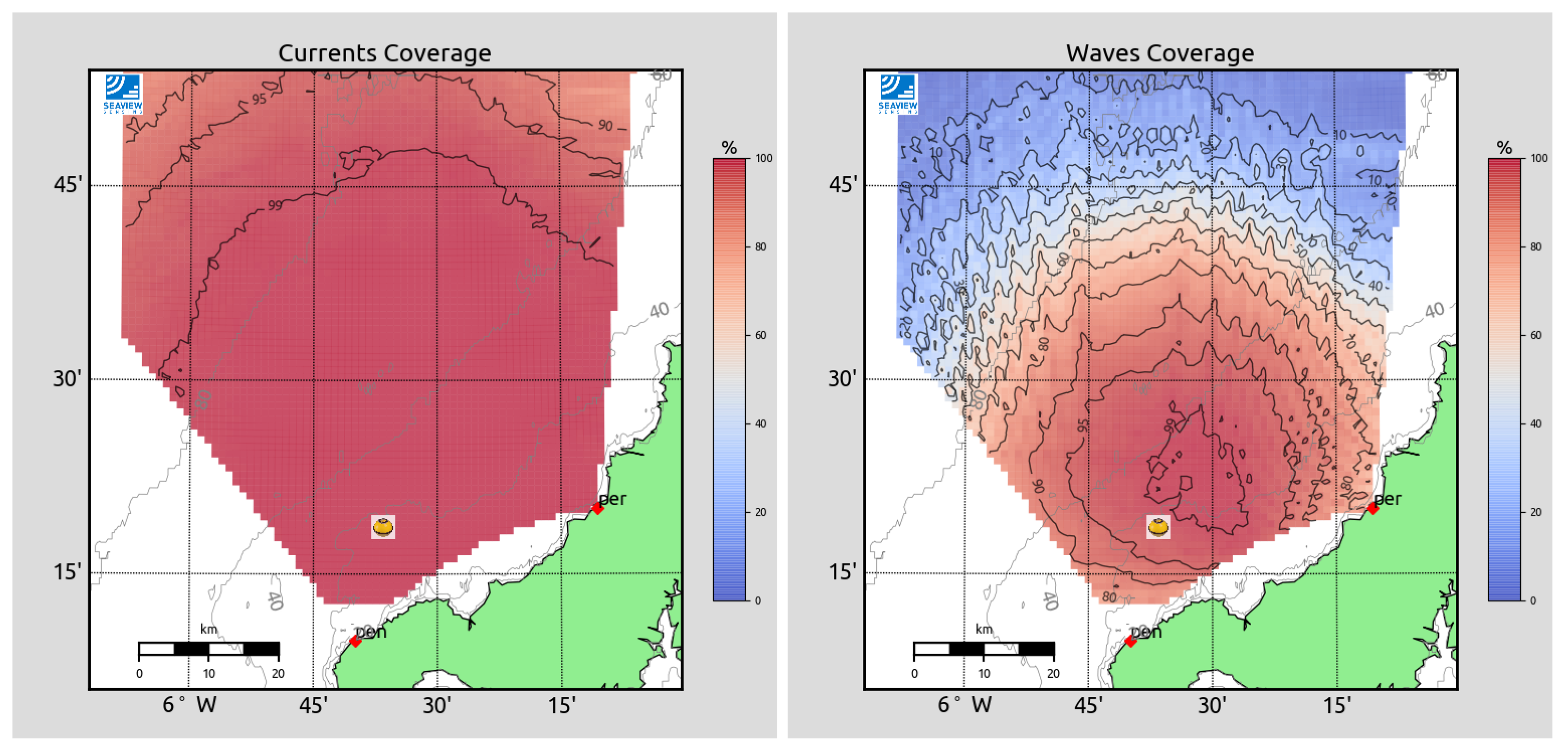
Figure 10, which can be attributed to a number of factors, e.g., limitations in the inversion method; poorer-quality radar data; a difference between spatio-temporal (radar) and temporal (buoy) measurements; and even errors in the buoy measurements. Real wave measurement differences arising due to the obvious differences in the measurement methods between the radar and buoy could be important, but since both estimate wave spectra, which assume either spatio-temporal or temporal stationarity, we expect such differences to be small. The main limitation in the inversion method referred to here is the approximation used for the non-linear term. The implementation of the full non-linear expression is pending. HF radar systems do require monitoring and are susceptible to deteriorations in performance due to antenna or other hardware problems, which need to be quickly resolved to maintain good-quality metocean measurements. The variability in spatial mapping coverage with dual-radar systems (e.g., see
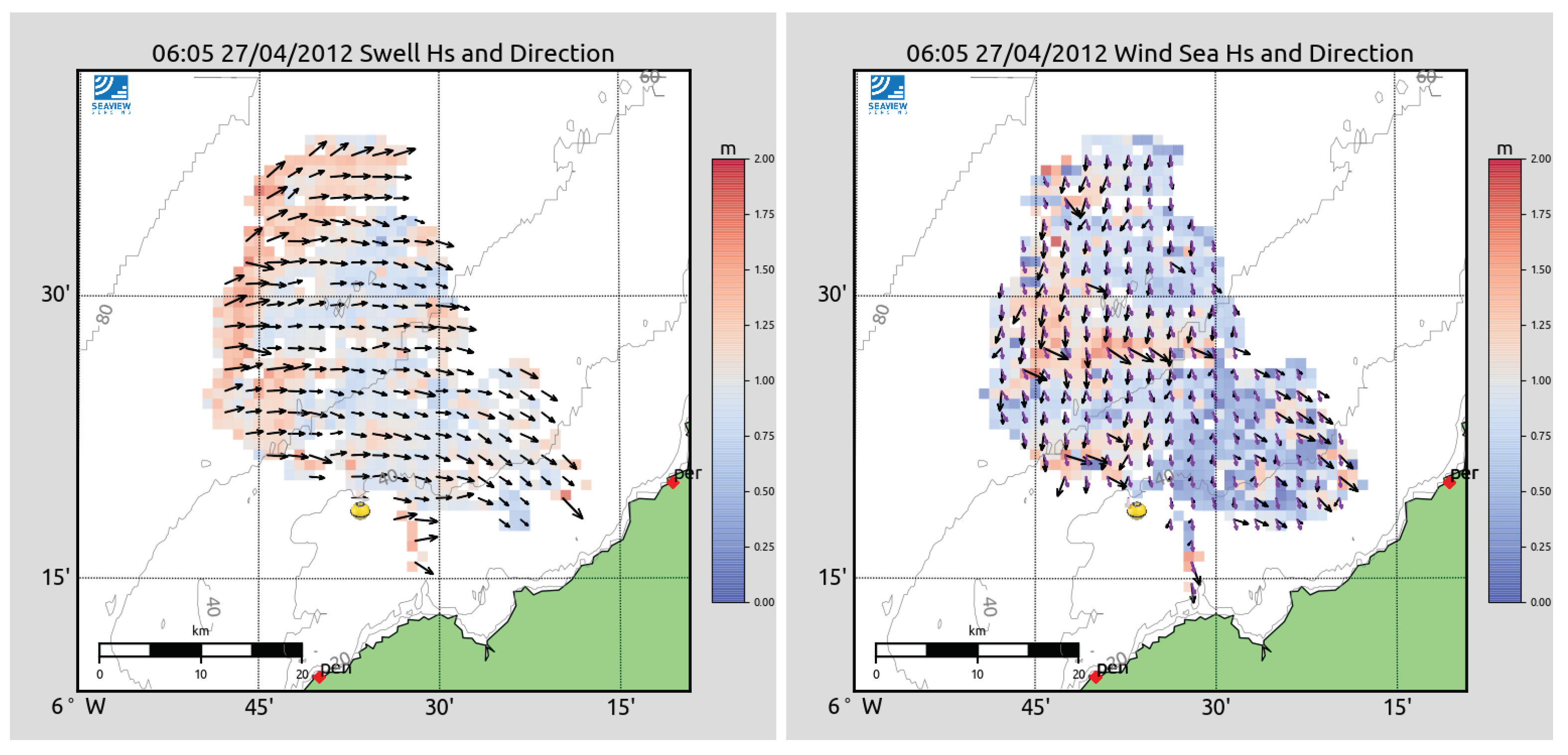
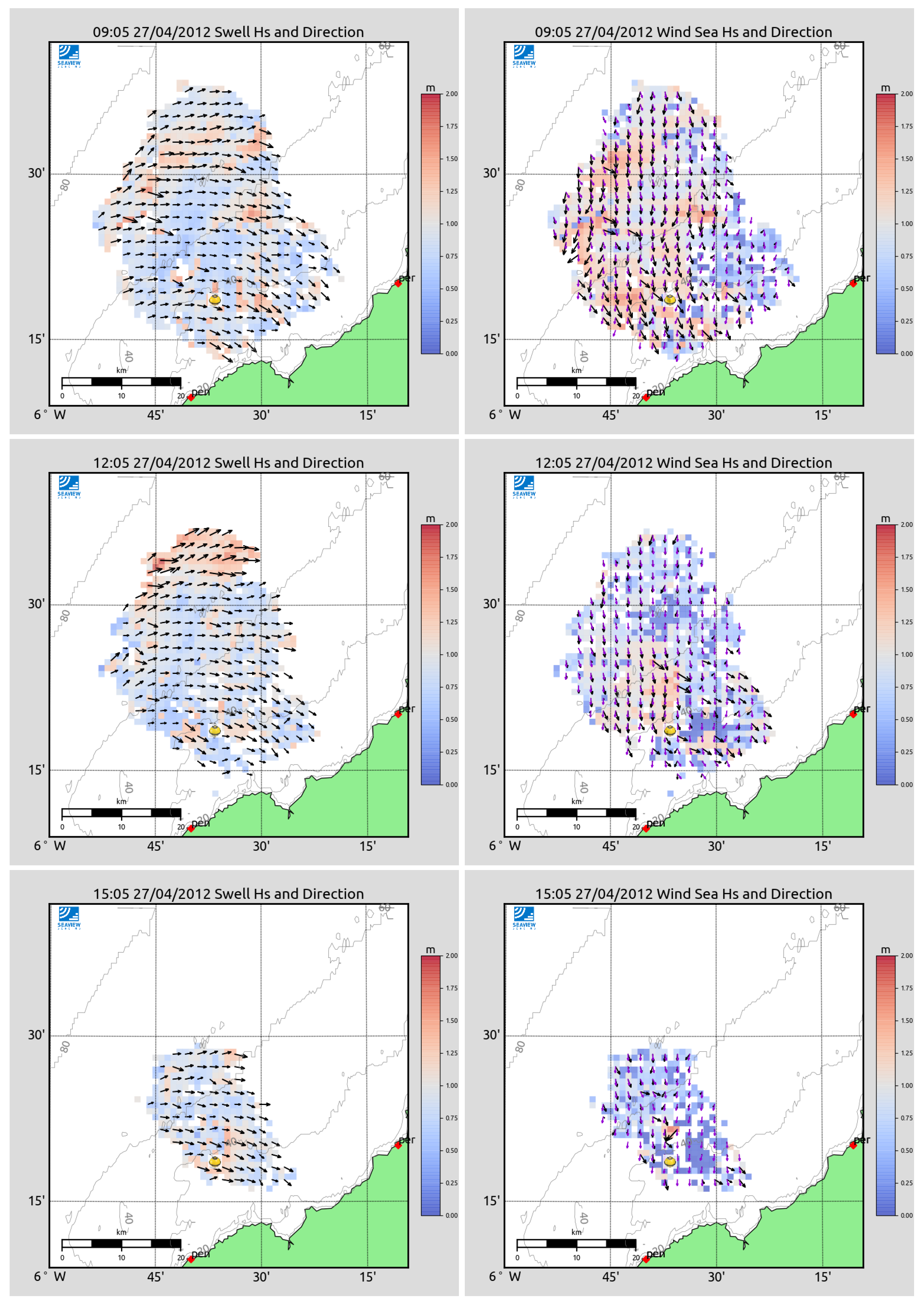
Figure 12), due to variations in the signal-to-noise as a result of hardware failure, external noise, interference, or environmental conditions, could be compensated for in part using single-radar inversions, albeit accepting a further reduction in accuracy until that process can be made more robust by assuming more spatial homogeneity (enabled by parallel processing) and by replacing the
M approximation with a more-robust formulation. Depending on the application, the availability of the spatial mapping of wave parameters to complement widely used surface current mapping and the easier maintenance of radar systems on land may outweigh the reduction in precision.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}