
UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review


Abstract
:1. Introduction
2. Materials and Methods
2.1. Eligibility Criteria
2.2. Information Sources
2.3. Search
2.4. Study Limitations
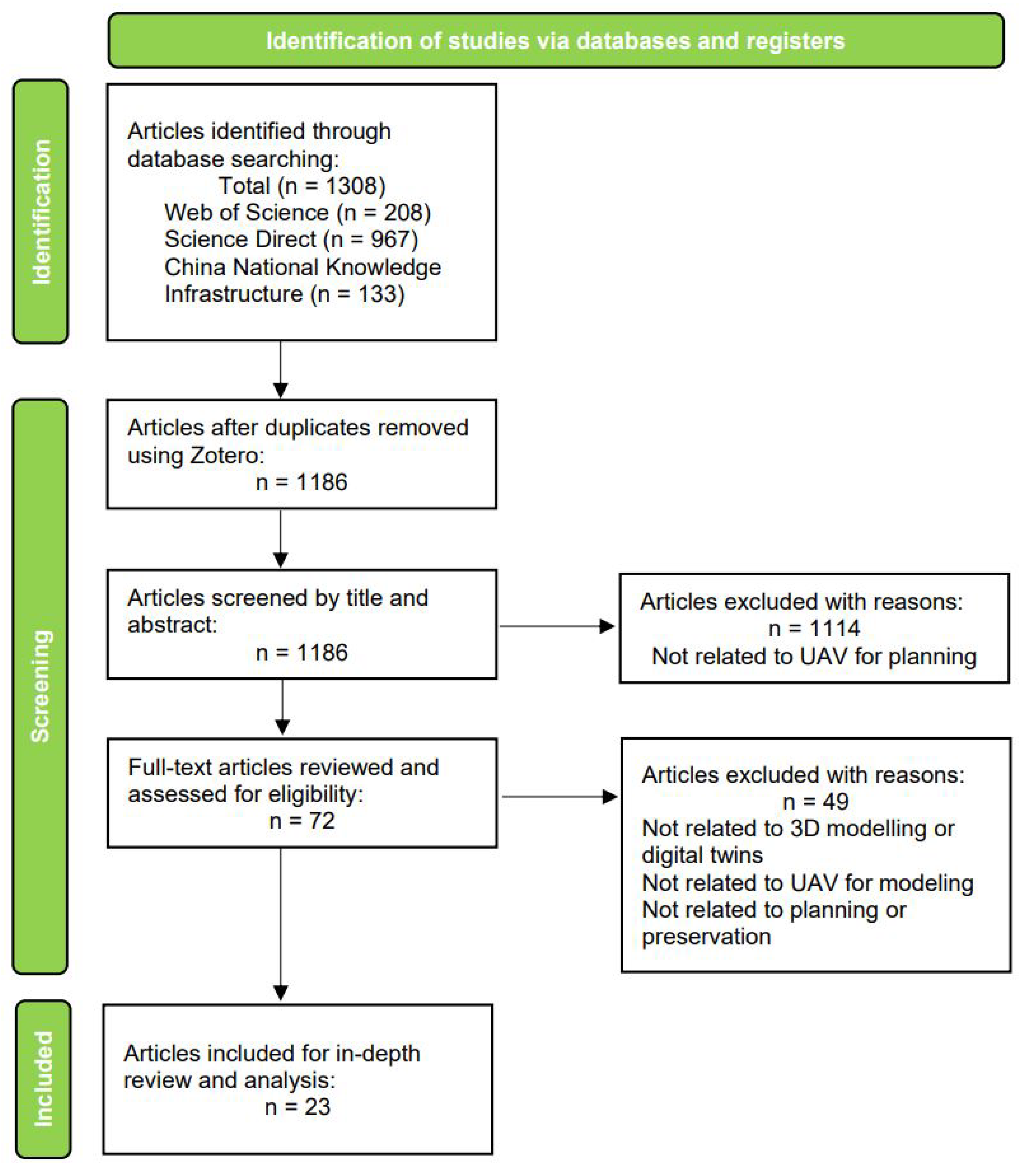
2.5. Study Selection
2.6. Analytical Framework
3. Recent Studies on the Use of UAVs in Planning
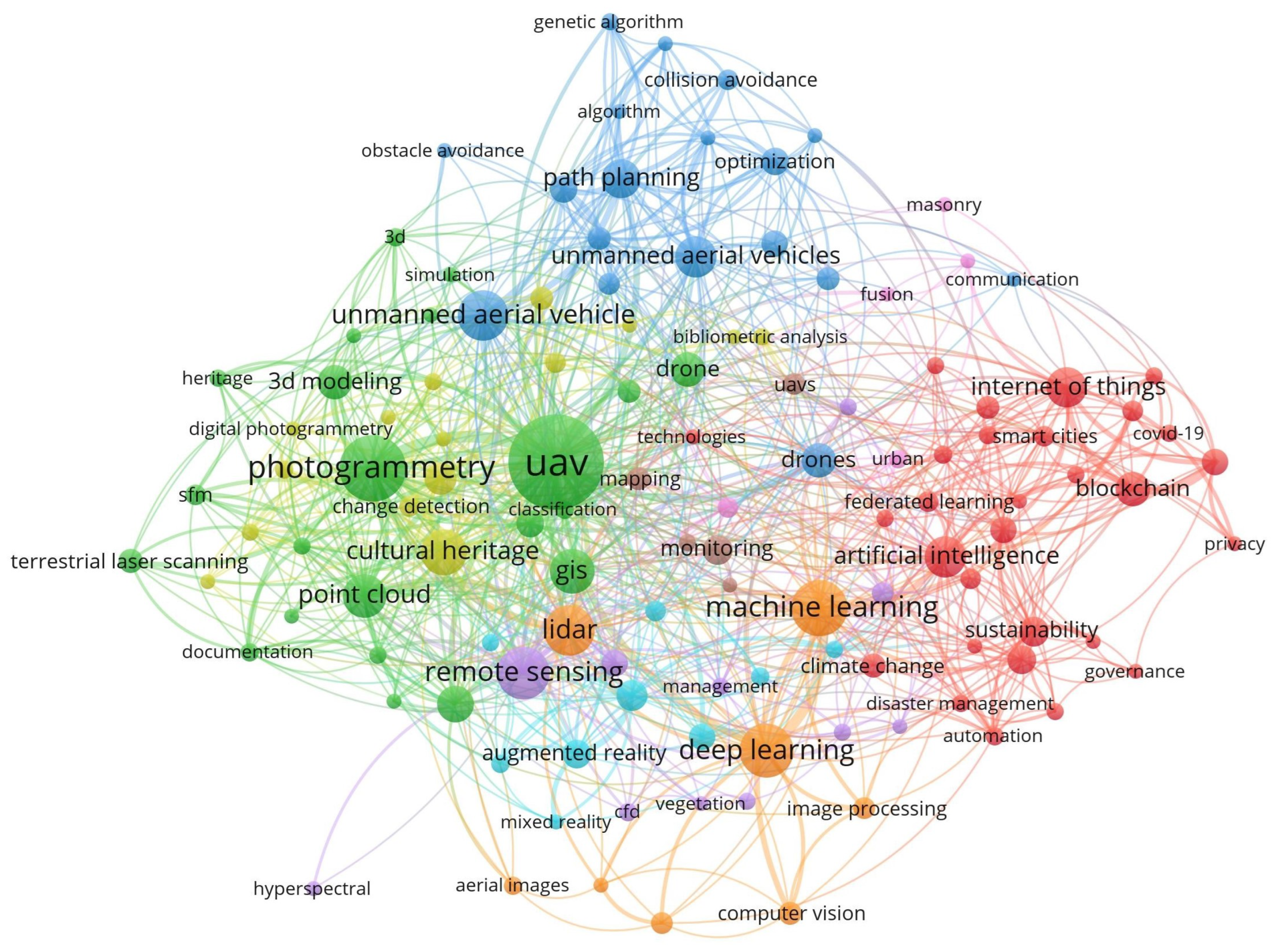
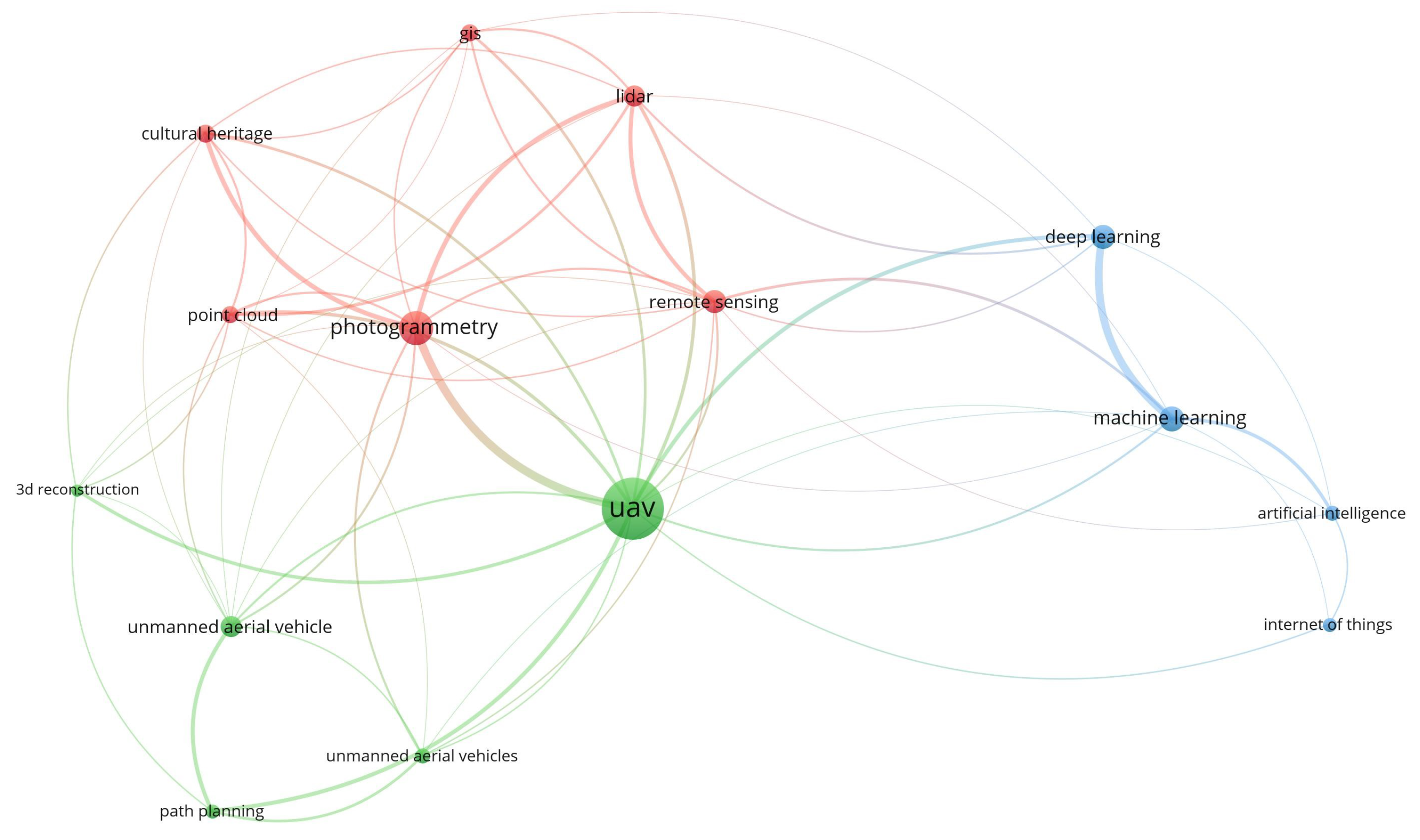
3.1. Overview of UAV Usage in Planning
3.2. Main Application Analysis
3.3. Common Themes
3.4. Common Method and Model
3.5. Critical Challenges and Notable Gaps in the Literature
4. Existing Limitations and Barriers of UAV 3D Modeling for Planning
4.1. Policy
4.2. Environment
4.3. Disciplinary
4.4. Hardware
4.5. Software
5. Discussions
6. Conclusions
7. Future Prospects
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hostert, P. Advances in Urban Remote Sensing: Examples From Berlin (Germany). In Applied Remote Sensing for Urban Planning, Governance and Sustainability; Netzband, M., Stefanov, W.L., Redman, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 37–51. [Google Scholar] [CrossRef]
- Bakogiannis, E.; Kyriakidis, C.; Zafeiris, V. Using Unmanned Aerial Vehicles (UAVs) to Analyze the Urban Environment. Eur. J. Form. Sci. Eng. 2022, 5, 49–60. [Google Scholar] [CrossRef]
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sens. 2021, 13, 2139. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Kleinschroth, F.; Banda, K.; Zimba, H.; Dondeyne, S.; Nyambe, I.; Spratley, S.; Winton, R.S. Drone imagery to create a common understanding of landscapes. Landsc. Urban Plan. 2022, 228, 104571. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Tan, R.; Li, P.; Lin, W.; Pan, C. Improvement of 3D Urban Modeling Method Based on Unmanned Aerial Vehicle Oblique Photography. Bull. Surv. Mapp. 2016, 11, 39–42. [Google Scholar]
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Allouche, M. The integration of UAVs in airspace. Air Space Eur. 2000, 2, 101–104. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, L.; Ye, Y.; Wang, Z. Curbing Sprawl with Development-limiting Boundaries in Urban China: A Review of Literature. J. Plan. Lit. 2020, 35, 25–40. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Lienard, J.; Vogs, A.; Gatziolis, D.; Strigul, N. Embedded, real-time UAV control for improved, image-based 3D scene reconstrucion. Measurement 2016, 81, 264–269. [Google Scholar] [CrossRef]
- Gatziolis, D.; Lienard, J.F.; Vogs, A.; Strigul, N.S. 3D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles. PLoS ONE 2015, 10, e0137765. [Google Scholar] [CrossRef] [PubMed]
- Alsadik, B.; Gerke, M.; Vosselman, G. Automated camera network design for 3D modeling of cultural heritage objects. J. Cult. Herit. 2013, 14, 515–526. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Musakwa, W.; van Niekerk, A. Earth Observation for Sustainable Urban Planning in Developing Countries: Needs, Trends, and Future Directions. J. Plan. Lit. 2015, 30, 149–160. [Google Scholar] [CrossRef]
- Lu, Y. Using Google Street View to investigate the association between street greenery and physical activity. Landsc. Urban Plan. 2019, 191, 103435. [Google Scholar] [CrossRef]
- Li, X.; Chen, X. Research on 3D modeling method of geological section based on UAV Aerial Photography. Sci. Technol. Innov. 2021, 9, 55–56. [Google Scholar]
- Wan, D. Research on the Application Practice of UAV in Urban Planning Measurement. Manag. Technol. SME 2021, 660, 188–190. [Google Scholar]
- Kikuchi, N.; Fukuda, T.; Yabuki, N. Future landscape visualization using a city digital twin: Integration of augmented reality and drones with implementation of 3D model-based occlusion handling. J. Comput. Des. Eng. 2022, 9, 837–856. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L. Study on the application of 3D modeling based on UAV photography in urban planning—Taking Yi Jiequ area in Du Jiangyan as an example. AIP Conf. Proc. 2017, 1864, 020226. [Google Scholar] [CrossRef]
- El-Mekawy, M.; Hijazi, I. 3D City Modelling and Remote Sensing: Advances, Challenges, and New Technologies [Special Issue]. 2023. Available online: https://www.mdpi.com/journal/remotesensing/special_issues/3D_modelling_remote_sensin (accessed on 17 November 2023).
- Butila, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature 1008 Review. Remote Sens. 2022, 14, 620. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, T.P. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [PubMed]
- Ullah, F.; Qayyum, S.; Thaheem, M.J.; Al-Turjman, F.; Sepasgozar, S.M.E. Risk management in sustainable smart cities governance: A TOE framework. Technol. Forecast. Soc. Chang. 2021, 167, 120743. [Google Scholar] [CrossRef]
- Hurtado, P.; Gomez, A. Smart City Digital Twins Are a New, Hi-Tech Tool for Scenario Planning. Am. Plan. Assoc. 2021. Available online: https://www.planning.org/planning/2021/spring/smart-city-digital-twins-are-a-new-tool-for-scenario-planning/ (accessed on 11 January 2012).
- Minner, J.; Chusid, J. Time, Architecture, and Geography: Modeling the Past and Future of Cultural Landscapes. APT Bull. 2016, 47, 49–58. [Google Scholar]
- Minner, J.; Chusid, J.; Shi, X.; Feng, Y.; Sun, F.; Azel, N.; Taru, T. Visualizing the Past, Present, and Future of New York City’s 1964–1965 World’s Fair Site Using 3D GIS and Procedural Modeling. Report published for National Center for Preservation Technology and Training. Cell 2017, 607, 4004. [Google Scholar] [CrossRef]
- Bobylev, N.; Syrbe, R.U.; Wende, W. Geosystem services in urban planning. Sustain. Cities Soc. 2022, 85, 104041. [Google Scholar] [CrossRef]
- Garstki, K. Virtual representation: The production of 3d digital artifacts. J. Archaeol. Method Theory 2017, 24, 726–750. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Yunus, A.M.; Hamzah, A.H.; Azmi, F.A.M. Drone Technology as A Modern Tool in Monitoring the Rural-Urban Development. IOP Conf. Ser. Earth Environ. Sci. 2020, 540, 012076. [Google Scholar] [CrossRef]
- Kim, D. Pedestrian and Bicycle Volume Data Collection Using Drone Technology. J. Urban Technol. 2020, 27, 45–60. [Google Scholar] [CrossRef]
- Bhatnagar, S.; Gill, L.; Regan, S.; Waldren, S.; Ghosh, B. A nested drone-satellite approach to monitoring the ecological conditions of wetlands. ISPRS J. Photogramm. Remote Sens. 2021, 174, 151–165. [Google Scholar] [CrossRef]
- Donaire, J.A.; Galí, N.; Gulisova, B. Tracking visitors in crowded spaces using zenith images: Drones and time-lapse. Tour. Manag. Perspect. 2020, 35, 100680. [Google Scholar] [CrossRef]
- Karachaliou, E.; Georgiou, E.; Psaltis, D.; Stylianidis, E. UAV for mapping historic buildings: From 3d modelling to bim. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 397–402. [Google Scholar] [CrossRef]
- Li, Y. UAV Photogrammetry and its Application in Urban Planning. Metall. Mater. 2018, 38, 181–182. [Google Scholar]
- Tariq, A.; Gillani, S.M.O.A.; Qureshi, H.K.; Haneef, I. Heritage preservation using aerial imagery from light weight low cost Unmanned Aerial Vehicle (UAV). In Proceedings of the 2017 International Conference on Communication Technologies (ComTech), Rawalpindi, Pakistan, 19–21 April 2017; pp. 201–205. [Google Scholar] [CrossRef]
- Berrett, B.E.; Vernon, C.A.; Beckstrand, H.; Pollei, M.; Markert, K.; Franke, K.W.; Hedengren, J.D. Large-Scale Reality Modeling of a University Campus Using Combined UAV and Terrestrial Photogrammetry for Historical Preservation and Practical Use. Drones 2021, 5, 136. [Google Scholar] [CrossRef]
- Erenoglu, R.; Erenoglu, O.; Arslan, N. Accuracy Assessment of Low Cost UAV Based City Modelling for Urban Planning. Teh. Vjesn. 2018, 25, 1708–1714. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, F.; Pun, C.M.; Yang, Y.; Lan, R.; Wang, L.; Li, Y.; Gao, H. Virtual Reality Aided High-Quality 3D Reconstruction by Remote Drones. ACM Trans. Internet Technol. 2021, 22, 3458930. [Google Scholar] [CrossRef]
- Campbell, D.A. Drones, Machetes, and Virtual Reality: 21st-Century Tools for Historic Preservation. In Proceedings of the 2018 3rd Digital Heritage International Congress (DigitalHERITAGE) held jointly with 2018 24th International Conference on Virtual Systems & Multimedia (VSMM 2018), San Francisco, CA, USA, 26–30 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Skondras, A.; Karachaliou, E.; Tavantzis, I.; Tokas, N.; Valari, E.; Skalidi, I.; Bouvet, G.A.; Stylianidis, E. UAV Mapping and 3D Modeling as a Tool for Promotion and Management of the Urban Space. Drones 2022, 6, 115. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, L.; Gerke, M.; Wang, R.; Yang, H. Skeletal camera network embedded structure-from-motion for 3D scene reconstruction from UAV images. ISPRS J. Photogramm. Remote Sens. 2016, 121, 113–127. [Google Scholar] [CrossRef]
- Ferworn, A.; Tran, J.; Ufkes, A.; D’Souza, A. Initial experiments on 3D modeling of complex disaster environments using unmanned aerial vehicles. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 167–171. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Ibrahim, I.; Abdullah, A.; Abdullah, A.A.A. Information Fusion for Cultural Heritage Three-Dimensional Modeling of Malay Cities. ISPRS Int. J. Geo-Inf. 2020, 9, 177. [Google Scholar] [CrossRef]
- Manajitprasert, S.; Tripathi, N.K.; Arunplod, S. Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand. Appl. Sci. 2019, 9, 3640. [Google Scholar] [CrossRef]
- Remondino, F. Heritage Recording and 3D Modeling with Photogrammetry and 3D Scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef]
- Yan, F.; Xia, E.; Li, Z.; Zhou, Z. Sampling-Based Path Planning for High-Quality Aerial 3D Reconstruction of Urban Scenes. Remote Sens. 2021, 13, 989. [Google Scholar] [CrossRef]
- Koch, T.; Körner, M.; Fraundorfer, F. Automatic and Semantically-Aware 3D UAV Flight Planning for Image-Based 3D Reconstruction. Remote Sens. 2019, 11, 1550. [Google Scholar] [CrossRef]
- Duan, P.; Wang, M.; Lei, Y.; Li, J. Research on Estimating Water Storage of Small Lake Based on Unmanned Aerial Vehicle 3D Model. Water Resour. 2021, 48, 690–700. [Google Scholar] [CrossRef]
- Jo, Y.H.; Hong, S. Three-Dimensional Digital Documentation of Cultural Heritage Site Based on the Convergence of Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry. ISPRS Int. J.-Geo-Inf. 2019, 8, 53. [Google Scholar] [CrossRef]
- Papadopoulou, E.E.; Vasilakos, C.; Zouros, N.; Soulakellis, N. DEM-Based UAV Flight Planning for 3D Mapping of Geosites: The Case of Olympus Tectonic Window, Lesvos, Greece. ISPRS Int. J.-Geo-Inf. 2021, 10, 535. [Google Scholar] [CrossRef]
- Templin, T.; Popielarczyk, D. The Use of Low-Cost Unmanned Aerial Vehicles in the Process of Building Models for Cultural Tourism, 3D Web and Augmented/Mixed Reality Applications. Sensors 2020, 20, 5457. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.; Li, W.; Zhang, Q.; Zhu, W.; Chen, D.; Liu, J.; Shu, T. Using unmanned aerial vehicle data to assess the three-dimension green quantity of urban green space: A case study in Shanghai, China. Landsc. Urban Plan. 2017, 164, 81–90. [Google Scholar] [CrossRef]
- Whitehurst, D.; Friedman, B.; Kochersberger, K.; Sridhar, V.; Weeks, J. Drone-based community assessment, planning, and disaster risk management for sustainable development. Appl. Sci. 2021, 13, 1739. [Google Scholar] [CrossRef]
- Papadopoulou, E.E.; Papakonstantinou, A.; Zouros, N.; Soulakellis, N. Scale-variant flight planning for the creation of 3d geovisualization and augmented reality maps of geosites: The case of voulgaris gorge, lesvos, greece. Remote Sens. 2021, 11, 733. [Google Scholar] [CrossRef]
- Soulakellis, N.; Vasilakos, C.; Chatzistamatis, S.; Kavroudakis, D.; Tataris, G.; Papadopoulou, E.E.; Papakonstantinou, A.; Rousou, O.; Kontos, T. Post-earthquake recovery phase monitoring and mapping based on uas data. ISPRS Int. J. Geo-Inf. 2020, 9, 447. [Google Scholar] [CrossRef]
- Nagasawa, R.; Mas, E.; Moya, L.; Koshimura, S. Model-based analysis of multi-UAV path planning for surveying postdisaster building damage. Sci. Rep. 2021, 11, 18588. [Google Scholar] [CrossRef]
- Girindran, R.; Boyd, D.S.; Rosser, J.; Vijayan, D.; Long, G.; Robinson, D. On the reliable generation of 3d city models from open data. Urban Sci. 2020, 4, 47. [Google Scholar] [CrossRef]
- Hamin Infield, E.; Shi, L.; Garcia, I.; Minner, J.; Whittington, J.; Goh, K.; Hsu, D.; Agyeman, J.; Boswell, M.; Stone, B. Planning for Climate Leadership. J. Plan. Educ. Res. 2023, 4, 43. [Google Scholar] [CrossRef]
- Heisel, F.; McGranahan, J.; Ferdinando, J.; Dogan, T. High-resolution combined building stock and building energy modeling to evaluate whole-life carbon emissions and saving potentials at the building and urban scale. Resour. Conserv. Recycl. 2022, 177, 106000. [Google Scholar] [CrossRef]
- Worth, G.; Fernandes, A.; Heisel, F.; Minner, J.; O’Malley, C. How Cities Can Stop Wasting Buildings: The Case for Deconstruction. In Circular Construction and Circular Economy; Birkhauser: Basel, Switzerland, 2022; pp. 32–37. [Google Scholar]
- Pantoja-Rosero, B.G.; Achanta, R.; Beyer, K. Damage-augmented digital twins towards the automated inspection of buildings. Autom. Constr. 2023, 150, 104842. [Google Scholar] [CrossRef]
- Park, K.; Ewing, R. The usability of unmanned aerial vehicles (UAVs) for measuring park-based physical activity. Landsc. Urban Plan. 2017, 167, 157–164. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Nelson, J.R.; Grubesic, T.H.; Wallace, D.; Chamberlain, A.W. The View from Above: A Survey of the Public’s Perception of Unmanned Aerial Vehicles and Privacy. J. Urban Technol. 2019, 26, 83–105. [Google Scholar] [CrossRef]
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten questions concerning the use of drones in urban environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Kunovjanek, M.; Wankmüller, C. Containing the COVID-19 pandemic with drones - Feasibility of a drone enabled back-up transport system. Transp. Policy 2021, 106, 141–152. [Google Scholar] [CrossRef] [PubMed]
- Sabino, H.; Almeida, R.V.; de Moraes, L.B.; da Silva, W.P.; Guerra, R.; Malcher, C.; Passos, D.; Passos, F.G. A systematic literature review on the main factors for public acceptance of drones. Technol. Soc. 2022, 71, 102097. [Google Scholar] [CrossRef]
- Hodgson, C.; Chang, K. Using drone technology to collect school transportation data. Travel Behav. Soc. 2023, 31, 1–9. [Google Scholar] [CrossRef]
- Grubesic, T.H.; Wallace, D.; Chamberlain, A.W.; Nelson, J.R. Using unmanned aerial systems (UAS) for remotely sensing physical disorder in neighborhoods. Landsc. Urban Plan. 2018, 169, 148–159. [Google Scholar] [CrossRef]
- Fairley, I.; Williamson, B.J.; McIlvenny, J.; King, N.; Masters, I.; Lewis, M.; Neill, S.; Glasby, D.; Coles, D.; Powell, B.; et al. Drone-based large-scale particle image velocimetry applied to tidal stream energy resource assessment. Renew. Energy 2022, 196, 839–855. [Google Scholar] [CrossRef]
- Sziroczak, D.; Rohacs, D.; Rohacs, J. Review of using small UAV based meteorological measurements for road weather management. Prog. Aerosp. Sci. 2022, 134, 100859. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. UAV-Based Traffic Analysis: A Universal Guiding Framework Based on Literature Survey. Transp. Res. Procedia 2017, 22, 541–550. [Google Scholar] [CrossRef]
- Shao, H.; Song, P.; Mu, B.; Tian, G.; Chen, Q.; He, R.; Kim, G. Assessing city-scale green roof development potential using Unmanned Aerial Vehicle (UAV) imagery. Urban For. Urban Green. 2021, 57, 126954. [Google Scholar] [CrossRef]
- Zhou, L.; Meng, R.; Tan, Y.; Lv, Z.; Zhao, Y.; Xu, B.; Zhao, F. Comparison of UAV-based LiDAR and digital aerial photogrammetry for measuring crown-level canopy height in the urban environment. Urban For. Urban Green. 2022, 69, 127489. [Google Scholar] [CrossRef]
- Drones·NYC311. Available online: https://portal.311.nyc.gov/article/?kanumber=KA-01541 (accessed on 8 January 2023).
- FAA. Small Unmanned Aircraft Systems (UAS) Regulations (Part 107). Available online: https://www.faa.gov/newsroom/small-unmanned-aircraft-systems-uas-regulations-part-107 (accessed on 10 January 2023).
- Benchekroun, S.; Ullah, I.I.T. Preserving the Past for an Uncertain Future: Accessible, Low-Cost Methods for 3-D Data Creation, Processing, and Dissemination in Digital Cultural Heritage Preservation; Association for Computing Machinery: New York, NY, USA, 2022; Web3D ’21. [Google Scholar] [CrossRef]
- Buy dji Mavic 3 Series Low-Noise Propellers—Dji Store. Available online: https://store.dji.com/product/dji-mavic-3-low-noise-propellers (accessed on 10 January 2023).
- Specs—Matrice 300 rtk—Dji Enterprise. Available online: https://enterprise.dji.com/matrice-300/photo (accessed on 10 January 2023).
- Griwodz, C.; Gasparini, S.; Calvet, L.; Gurdjos, P.; Castan, F.; Maujean, B.; De Lillo, G.; Lanthony, Y. AliceVision Meshroom: An open-source 3D reconstruction pipeline. In Proceedings of the 12th ACM Multimedia Systems Conference, Istanbul, Turkey, 28 September–1 October 2021; pp. 241–247. [Google Scholar] [CrossRef]
- Liu, S.; Bonelli, W.P.; Pietrzyk, P.; Bucksch, A. Comparison of open-source three-dimensional reconstruction pipelines for maize-root phenotyping. Plant Phenome J. 2023, 6, e20068. [Google Scholar] [CrossRef]
- Narazaki, Y.; Hoskere, V.; Chowdhary, G.; Spencer, B.F. Vision-based navigation planning for autonomous post-earthquake inspection of reinforced concrete railway viaducts using unmanned aerial vehicles. Autom. Constr. 2022, 137, 104214. [Google Scholar] [CrossRef]
- Kim, H.; Narazaki, Y.; Spencer, B.F., Jr. Automated bridge component recognition using close-range images from unmanned aerial vehicles. Eng. Struct. 2022, 274, 115184. [Google Scholar] [CrossRef]
- Levine, N.M.; Narazaki, Y.; Spencer, B.F. Development of a building information model-guided post-earthquake building inspection framework using 3D synthetic environments. Earthq. Eng. Eng. Vib. 2023, 22, 279–307. [Google Scholar] [CrossRef]
- Liu, B.; Tang, Y.; Ma, C.; Bai, S. Application of 3D modeling of UAV tilt photography in urban rain flood risk assessment. Bull. Surv. Mapp. 2019, 46–50. [Google Scholar] [CrossRef]
- Liu, P.; Ke, R.; He, W. Application of UAV Remote Sensing Technology in Smart City Construction. Intell. City 2021, 7, 43–44. [Google Scholar]
- Quan, C. Discussion on the Application of UAV Oblique Photography 3D Model in Urban Planning. Intell. City 2020, 6, 71–72. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Author | Findings | Implications for Future Work | Hardware | Software |
|---|---|---|---|---|
| Karachaliou et al., 2019 [40] | UAV-based photogrammetry is a cost-effective and efficient tool for mapping historic buildings and can produce results from high-quality 3D models to Building Information Models (BIM). | The authors suggest that using Building Information Modeling (BIM) can be beneficial in preserving historical buildings and propose that future research should concentrate on enhancing BIM-based documentation for heritage sites. | DJI Phantom 3 Pro | REVIT Autodesk, Agisoft PhotoScan |
| Li, 2018 [41] | A paper on UAV photogrammetry and its implications in urban planning. Oblique photogrammetry can significantly improve mapping accuracy and has more intersection light than vertical photogrammetry, resulting in higher 3D model accuracy. | The potential of oblique photogrammetry in various areas, such as spatial analysis, investigating illegal construction, assisting with planning approval, and safeguarding historical buildings, requires further exploration through research. | NA | NA |
| Tariq et al., 2017 [42] | UAV photogrammetry can be used to develop realistic 3D models of archaeological sites with high accuracy to preserve digital 3D models in the management system for future reconstruction of historical sites. | The application of photogrammetry in the management of historical sites can be further explored to make it a mainstream tool for archaeological conservation. | DJI Phantom 4, Sony A5100 | Photoscan |
| Berrett et al., 2021 [43] | Automated UAV techniques can be applied along with terrestrial photogrammetry to generate hyper-realistic 3D models that can be used for large-scale university campus planning and historic preservation and public outreach as well as potential virtual reality (VR) and augmented reality (AR) tours. | The application of advanced technologies such as LiDAR in generating 3D models can be further explored to improve accuracy and generate more realistic representations of real-world environments. | DJI Phantom 4 RTK, Inspire 2 with Zenmuse X4S, Nikon D750, Canon EOS 5D Mark III, TOPCON GR-3 GPS unit | Lightroom, ArcGIS Pro, 3D Acute |
| Kikuchi et al., 2022 [21] | Augmented reality combined with drones can facilitate public participation in urban design decision-making processes through implementing detailed 3D models of the city (digital twins), which can achieve both first-person and overhead views in outdoor AR with occlusion handling. | There is potential for further exploration of the use of augmented reality in urban planning and design, particularly in enhancing public participation during the decision-making process. | DJI Mavic Mini | SketchUp Make, InfraWorks, OBS Studio for AR |
| Erenoglu et al., 2018 [44] | UAV-assisted 3D modeling can be a time-efficient and cost-effective approach for urban planning, and can be used for mapping damages safely and efficiently after natural hazards. | Further research is needed to optimize processing parameters such as camera characteristics, image scale, quality of imagery, and hardware capacity to improve the accuracy of UAV-assisted 3D modeling. | Mikrocopter XL 8, Canon EOS-M, Satlab Sl500 GPS, Kolida KTS-442 RLC station | Agisoft Photoscan, ArcMap |
| Zhang et al., 2022 [45] | The use of a telexistence drone system empowered with artificial intelligence and virtual reality can achieve real-time 3D reconstruction with high-quality results. | Further exploration is required to determine the practical applications of the telexistence drone system in data analysis and decision-making. Additionally, efforts can be made to reduce the latency caused by different components of the system to improve its overall performance. | MYNT AI D1000-50/Color stereo camera, ICP Tracker | Agisoft PhotoScan |
| Campbell, 2018 [46] | Drone photogrammetry and VR are effective tools for historic preservation efforts, and can provide new data and experiences for decision-making. The generated VR experiences were positively received by government officials and other professionals. | Applying photogrammetry and VR can aid preservation efforts of culturally significant artifacts which developing and refining best practices for photogrammetry and VR workflow in preservation efforts. | DJI Phantom 4 Pro, Canon EOS Rebel DSLR | Autodesk (Recap Photo, 3ds Max), 3DR Site Scan, Visualive3D Mobilive, Geotag Photos, Trimble SketchUp |
| Alsadik et al., 2013 [15] | The proposed automated camera network method for 3D modeling of cultural heritage objects showed improved accuracy and average coverage, with a significant reduction in the number of cameras required. | The image orientation steps required for obtaining high-resolution images need improvement in the future, and more reliable bundle adjustment can be achieved by using the sparse bundle adjustment package. | NA | Agisoft Photoscan, Microsoft Photosynth |
| Skondras et al., 2022 [47] | UAVs can fly in urban areas where airplanes cannot operate and produce high-resolution 3D modeling; thus, the use of UAVs is expected to increase in the future. | Future studies could investigate the integration of data obtained from the built environment with local spatial knowledge, as well as the creation of georeferenced and scaled models. | DJI Phantom 4 Pro | Pix4D Capture and Mapper, Blender |
| Xu et al., 2016 [48] | Using a minimum spanning tree to construct scene correlation network can reduce the computational cost of image matching in Structure-from-Motion (SfM) for 3D scene reconstruction from UAV images while preserving the accuracy and completeness of the final scene geometry. | The computation required for large volumes of images in Structure-from-Motion (SfM)-based methods for 3D scene reconstruction has increased significantly. Future work is needed during the image matching phase, which is among the most time-consuming stages of SfM methods. | Fixed-wing UAV, Canon EOS 5D mark II | Pix4Dmapper, PhotoScan, Micmac |
| Ferworn et al., 2011 [49] | Commercial off-the-shelf hardware can be used to create a system that aids in disaster response efforts by allowing for aerial surveying and the creation of 3D models. | A more autonomous system could be developed to improve data quality and consistency, with real-time onboard point cloud modeling used to immediately direct search and rescue efforts. | MK Hexakopter 2 | Microsoft Kinect video game peripheral |
| Gatziolis et al., 2015 [14] | GPS-enabled UAVs can be used for precise scaling of reconstructed tree point clouds. Higher image overlap does not significantly improve the accuracy or completeness of tree reconstructions. | Further research is needed for navigation precision in confined areas and obstacle avoidance in forested environments. | APM: Copter, Custom built DJI f550 UAV hexacopter | Mission Planner |
| Mohd Noor et al., 2020 [50] | The integration of MLS and UAV data can produce high-quality 3D models of building structures for cultural heritage purposes based on results of Malay cities. | The MLS approach can be expanded to capture other elements of the urban environment, such as vegetation, infrastructure, and natural features. | DJI Phantom 3, Topcon IP-S3 HD laser scanner | Agisoft PhotoScan, ESRI City Engine |
| Manajitprasert et al., 2019 [51] | This study found that the UAV–SfM approach is an effective and accurate tool for modeling 3D cultural heritage based on a case study conducted in Thailand. | Subsequent research could explore the incorporation of oblique images to identify and document minute details, thereby enhancing the effectiveness and precision of this technique as a substitute for laser scanning. | DJI Inspire 1 Pro, Riegl LMS-Z210 scanner | Pix4D, CloudCompare |
| Remondino, 2011 [52] | The authors found that 3D modeling and scanning technology contributed significantly to the documentation, conservation, and presentation of heritage information. | Developing new algorithms and methodologies can improve the 3D restitution pipeline, increase data storage, and improve the accessibility of geospatial data to non-expert users. | Helicopter, SLR camera | 3D Studio Max, Maya, Sketchup, Blender |
| Yan et al., 2021 [53] | Using an optimized trajectory can significantly improve the performance and quality of aerial 3D urban reconstruction. | Future work could focus on further improving the efficiency and accuracy of the proposed method and extending it to other types of scenes. | DJI Phantom 4 Pro | Unreal4, COLMAP |
| Koch et al., 2019 [54] | An automatic 3D UAV flight framework can generate high-quality 3D models while ensuring safe flight paths in complex and densely built environments. | Future research could encompass a more flexible strategy for viewpoint placement that includes multiple orientations for each camera viewpoint while taking into account the materials of individual object parts. | DJI Mavic Pro 2 | Pix4D, Blender |
| Duan et al., 2021 [55] | UAV data were used to generate a real 3D model and extract the lake boundary, enabling accurate representation of the lake’s actual scene. | Future work could explore the potential of automatic driving technology in lake estimation. | DJI Phantom 4 Pro, Huawei no. 3/Apache 3 | Bentley Context Capture Center 4.4, DP-Modeler 2.3 |
| Jo and Hong, 2019 [56] | Combining terrestrial laser scanning and UAV photogrammetry into a hybrid technology can enhance the reliability and applicability of 3D digital documentation and spatial analysis for cultural heritage sites. | Further investigation is required to decrease positional inconsistencies between the two survey technologies and assess how they vary depending on various scales and geomorphic environments. | Leica Aibot X6, Sony Alpha 6000, Trimble R6 Model 3 | Agisoft PhotoScan Profesional Edition |
| Papadopoulou et al., 2021 [57] | Using a digital elevation model (DEM) as a source of information for designing UAV flight plans tailored to the topography of each geosite can offer significant advantages over conventional image collection methods. | Subsequent research might focus on developing a fully automated algorithm based on the DEM of the study area. | DJI Phantom 4 Pro | AgiSoft Metashape Professional Edition, ESRI ArcMap, CloudCompare |
| Templin and Popielarczyk, 2020 [58] | UAV-based photogrammetry is a cost-effective and efficient approach for accurately scanning, surveying, and capturing reality in 3D when documenting cultural heritage. | Future work could include exploring possibilities of using higher-resolution cameras for better results. | DJI Phantom 4 PRO, Sony RX100 II, Leica ScanStation C10 | CloudCompare, AgiSoft Metashape Professional Edition, Cyclone |
| Liang et al., 2017 [59] | This study found that UAV 3D modeling with high-resolution RS data can accurately calculate the three-dimension green quantity (3DGQ) of urban green spaces based on a case study conducted in China. | Future work should include more time points to improve accuracy in the use of 3DGQ in urban green space design and planning. | Zero UAV YS09 | Pix4D |
| Type | Limitation |
|---|---|
| Policy |
|
| Environment | |
| Disciplinary |
|
| Hardware | |
| Software |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, D.; Minner, J. UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review. Remote Sens. 2023, 15, 5507. https://doi.org/10.3390/rs15235507
Hu D, Minner J. UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review. Remote Sensing. 2023; 15(23):5507. https://doi.org/10.3390/rs15235507
Chicago/Turabian StyleHu, Dingkun, and Jennifer Minner. 2023. "UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review" Remote Sensing 15, no. 23: 5507. https://doi.org/10.3390/rs15235507
APA StyleHu, D., & Minner, J. (2023). UAVs and 3D City Modeling to Aid Urban Planning and Historic Preservation: A Systematic Review. Remote Sensing, 15(23), 5507. https://doi.org/10.3390/rs15235507