


A Method for Estimating Ship Surface Wind Parameters by Combining Anemometer and X-Band Marine Radar Data



Abstract
:
1. Introduction
2. Model and Data
2.1. Numerical Simulation Physical Model
2.2. Anemometer and Radar Data
3. Method
3.1. Simulating Anemometer Wind Data
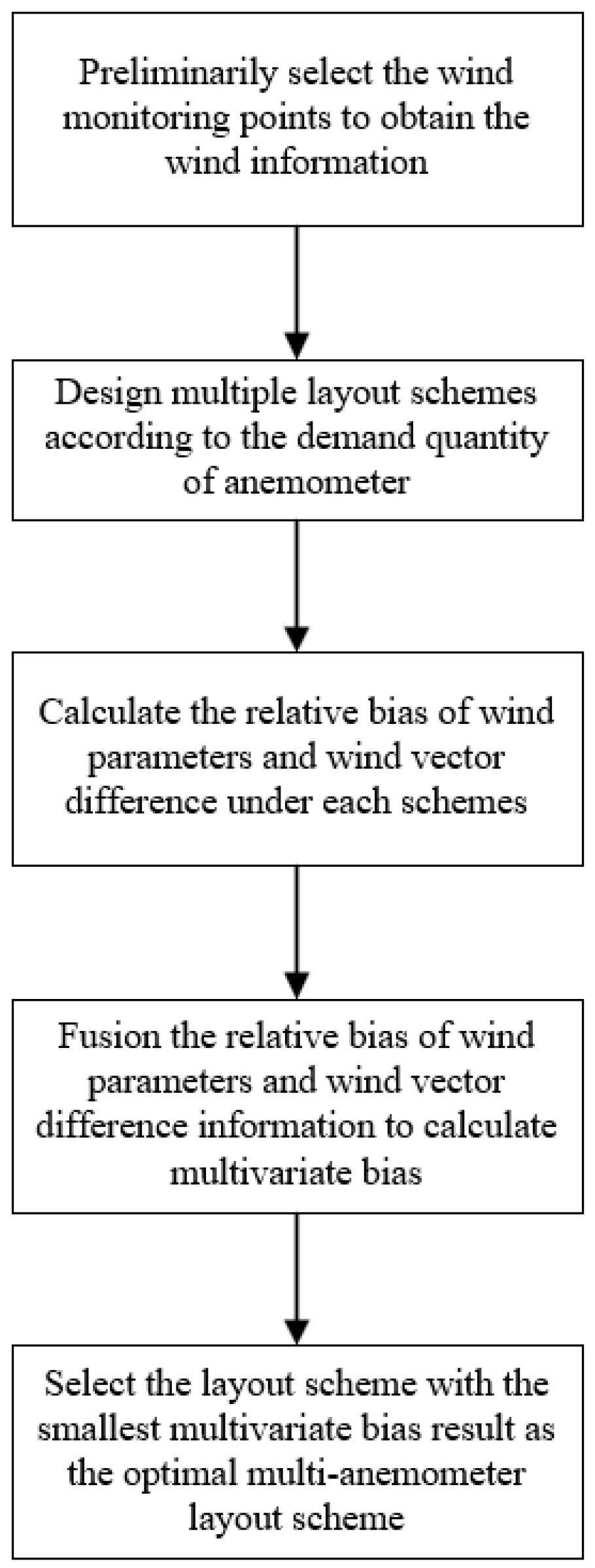
3.1.1. Optimal Layout of Multiple Anemometers Based on Multivariate Bias Strategy
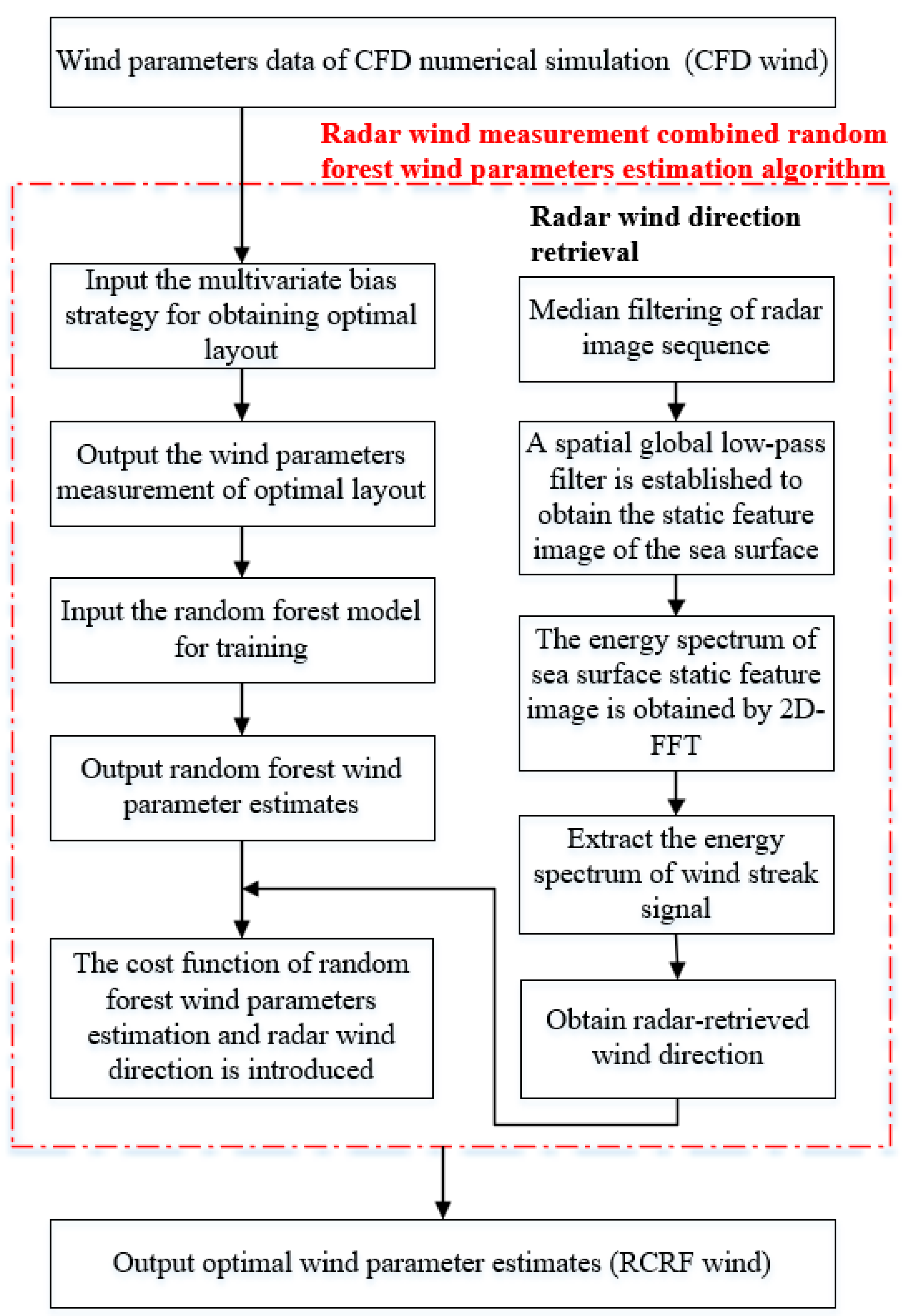
3.1.2. Random Forest (RF)-Based Wind Parameter Estimation Algorithm
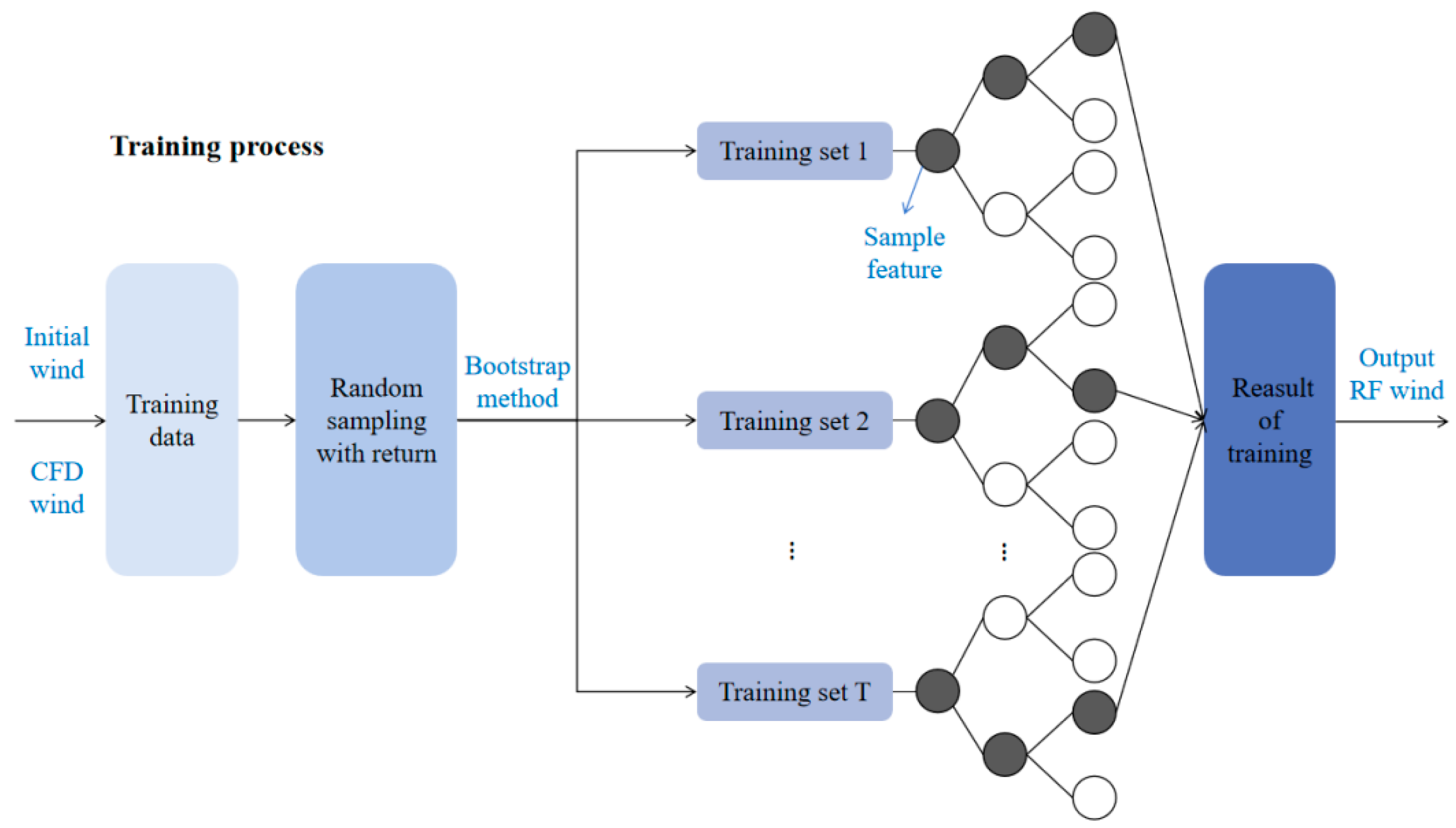
- Data selection: The initial wind speed and wind direction are taken as the input (wind direction is initially every 5° interval, and the wind speed is initially 3 m/s, 6 m/s, 9 m/s, 12 m/s, or 15 m/s). Additionally, the CFD wind direction and CFD wind speed measurements under the optimal layout at four different positions are taken as input samples in the training process. Using random sampling and feature selection, the samples are inputted into the RF algorithm to predict wind speed and wind direction. The resulting predictions are referred to as RF wind direction and RF wind speed . There are 365 sets of data in the CFD wind database, 80% of which are selected as training data and 20% as testing data;
- Constructing the random forest: The bootstrap method [43] is used to sample the training data 292 times randomly with return sampling. Some data may be selected multiple times due to the replacement extraction, and some data may not be selected. The samples taken out each time are not exactly the same, and these samples constitute the training data set of the decision tree . This operation is repeated to generate the training set , so as to generate decision trees for the construction of the random forest model;
- Feature selection: The CFD wind direction and CFD wind speed at four positions of the anemometer are used as the features of the sample data, so the sample data have eight features. In each decision tree node split, the RF randomly selects features from all the features with each feature without return. Three features are selected in this paper, and the best segmentation attributes are selected as nodes to build multiple classification and regression trees (CART). The size of during the growth of the decision tree is always the same;
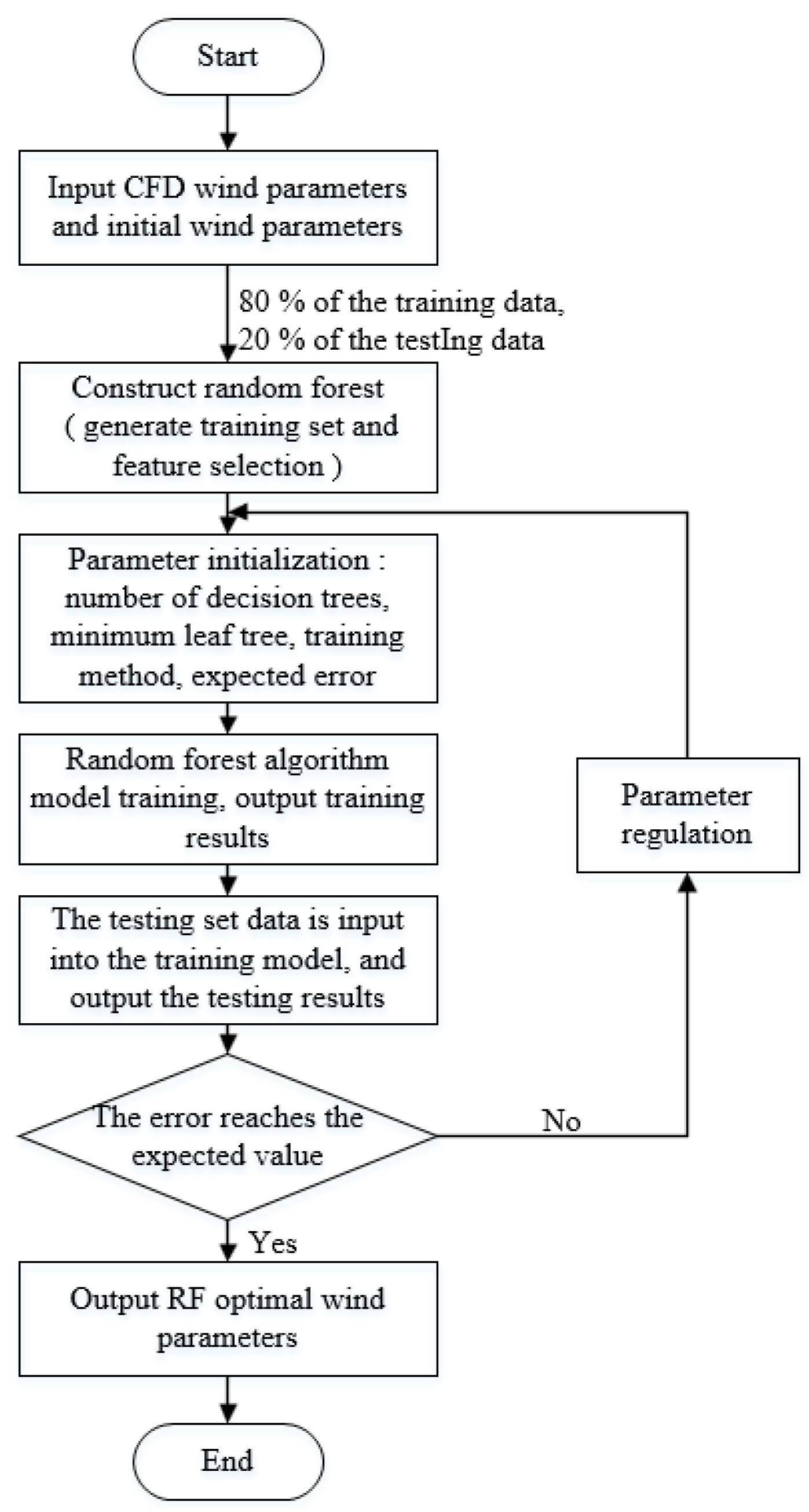
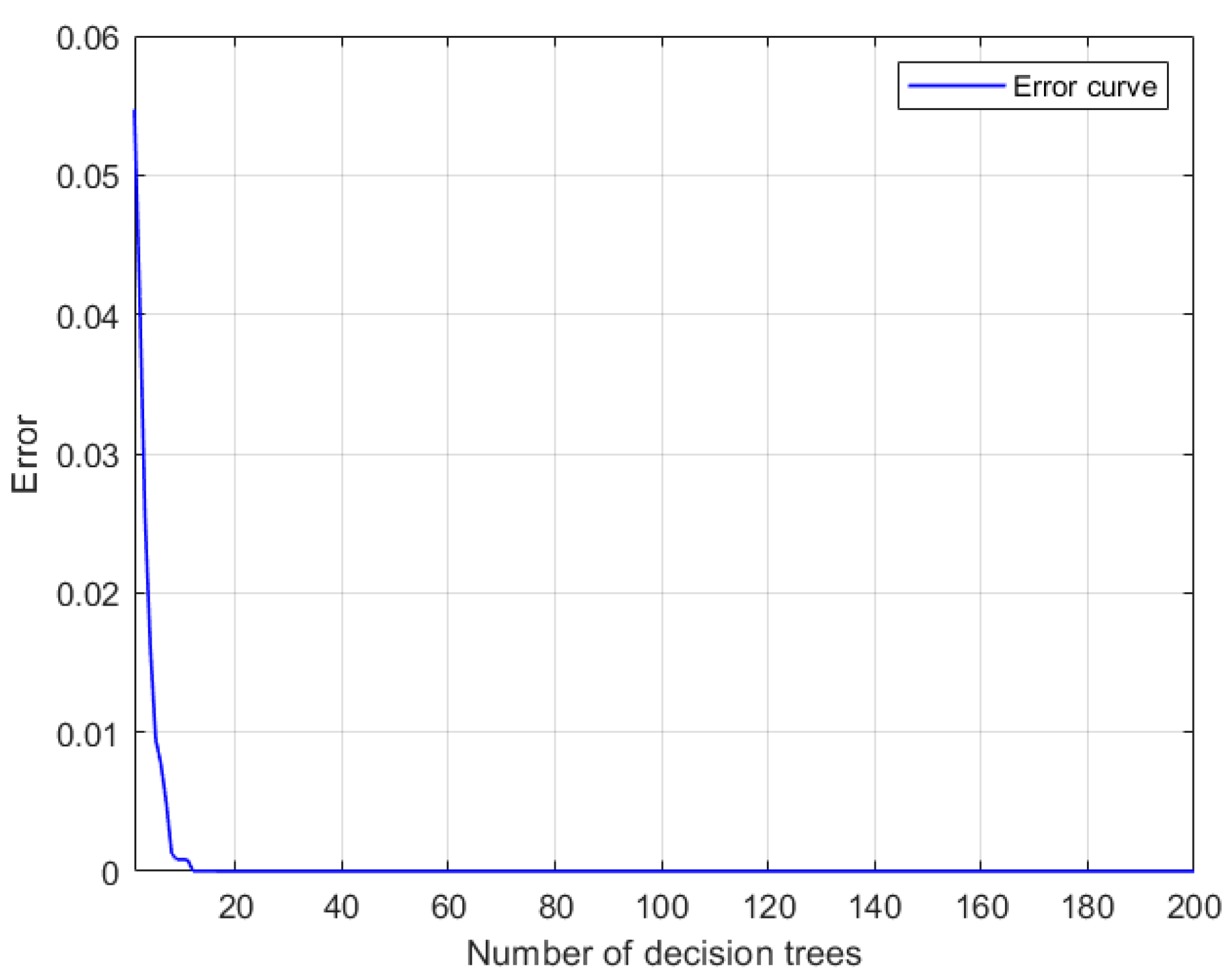
- Parameter initialization: The number of decision trees ranges from 1 to 292, and the number of decision trees increases by 10 per round of training. The minimum number of leaves is increased by 1 per training from 1. The training method is regression, and the expected error is set to 1 × 10−5;
- Model training: The multiple decision trees established above form a forest. For each decision tree, the above-selected samples and features are used for training. Figure 4 is the training process structure diagram;
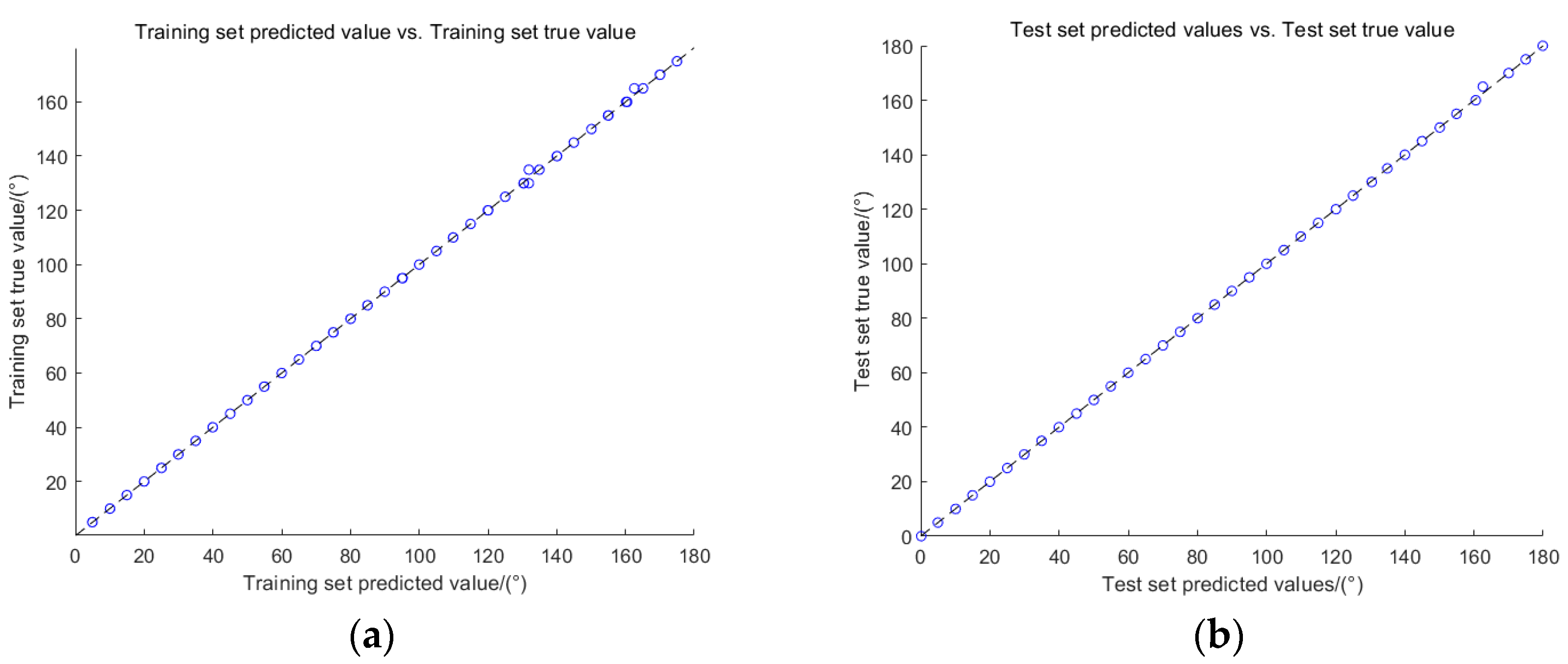
- Results prediction: Similarly, the bootstrap method is also used to generate the testing set by performing 73 times randomly with return sampling on the testing sample data. After repeating this operation, the testing set is generated. The information on the anemometer parameters at different positions studied in this paper is estimated as a regression problem. Therefore, based on the idea of ensemble learning, the mean value of each regression tree is taken as the prediction result. The formula is as follows:where is the model prediction result; is output based on and ; is the independent variable; is an independent and identically distributed random vector; and is the number of regression decision trees. Figure 5 shows the testing process structure diagram.
- Model evaluation: Comparing the testing set error results of different decision tree numbers and leaf numbers, the optimal RF wind parameters are output when the error reaches the expected value. Figure 6 shows the flow chart of RF model training.
3.2. Radar Wind Direction Retrieval
3.3. Combining Anemometer and Radar Results
4. Results
4.1. Performance Evaluation Index
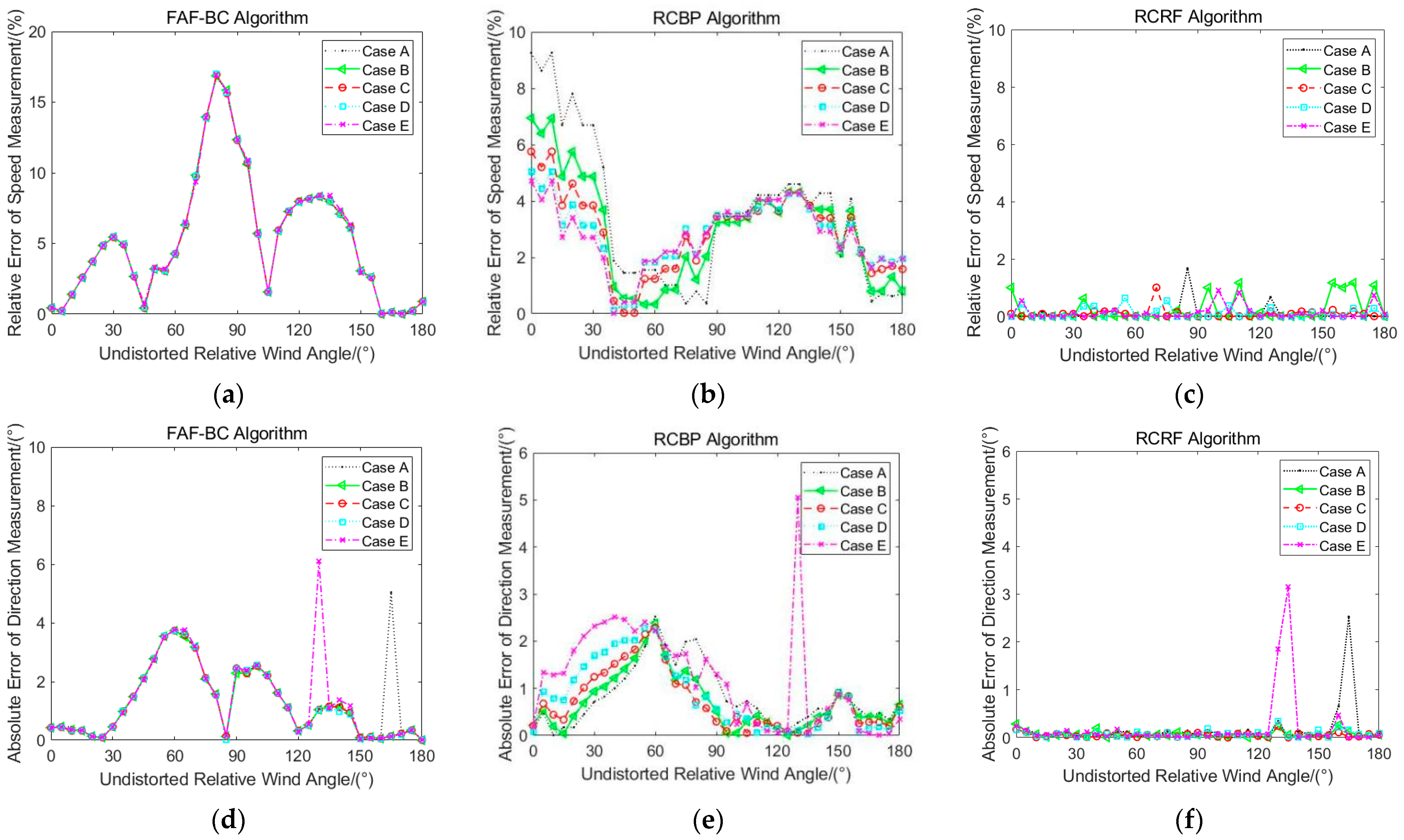
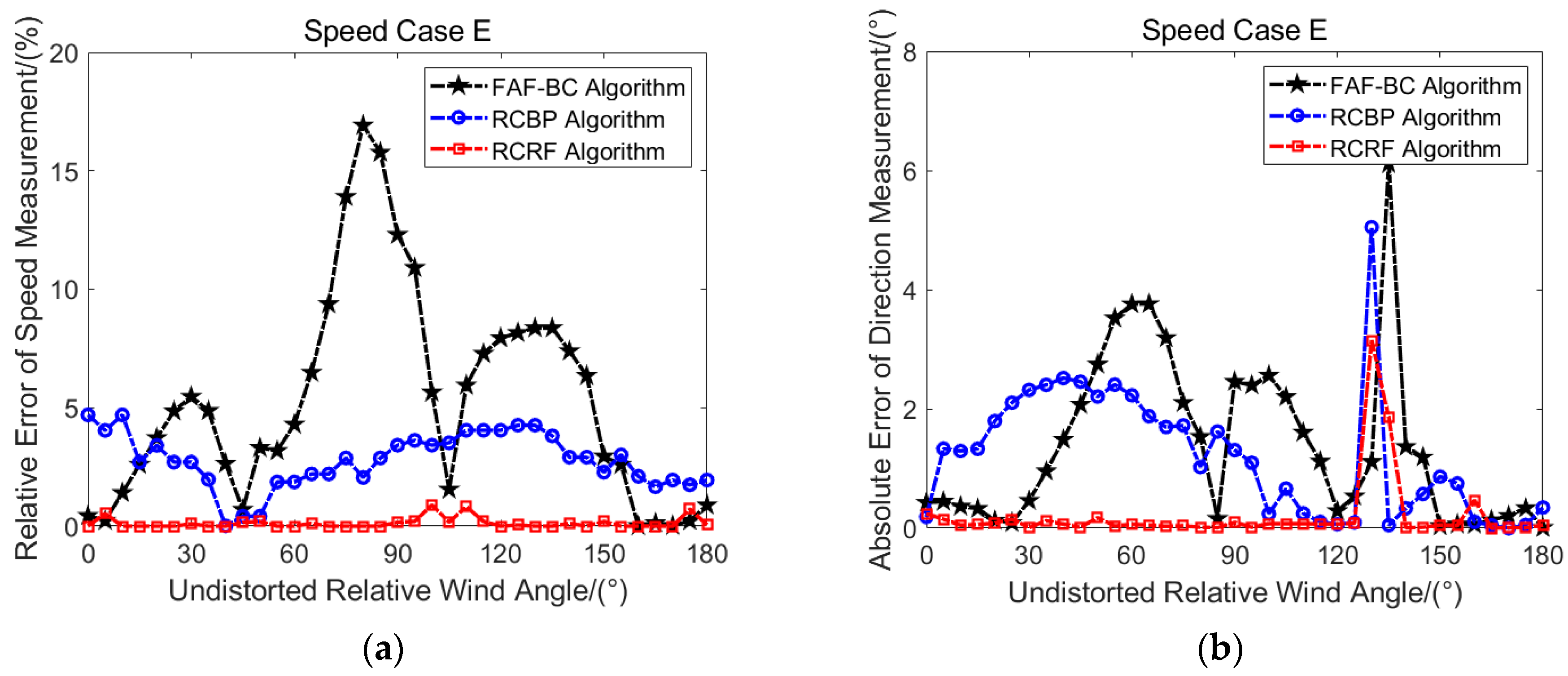
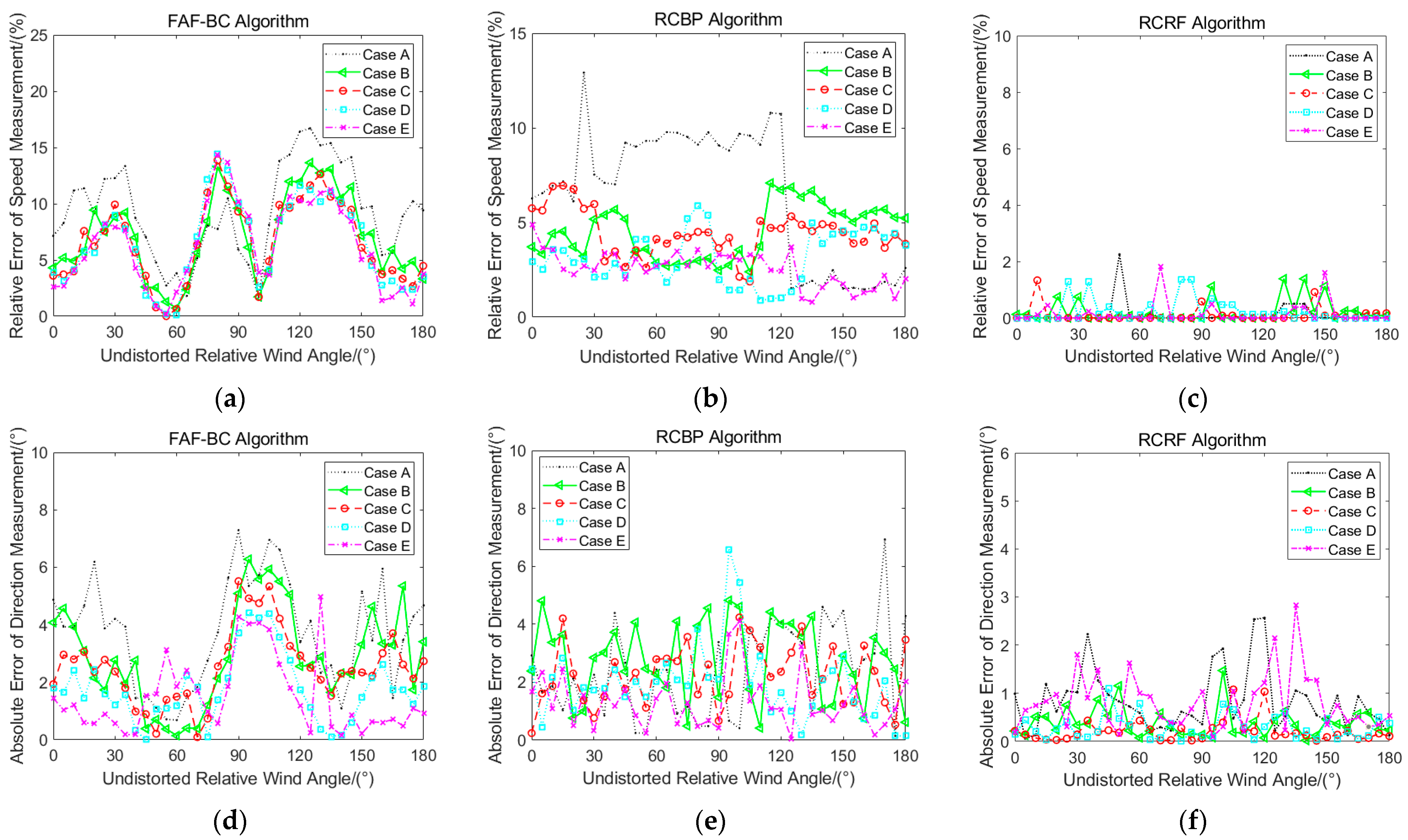
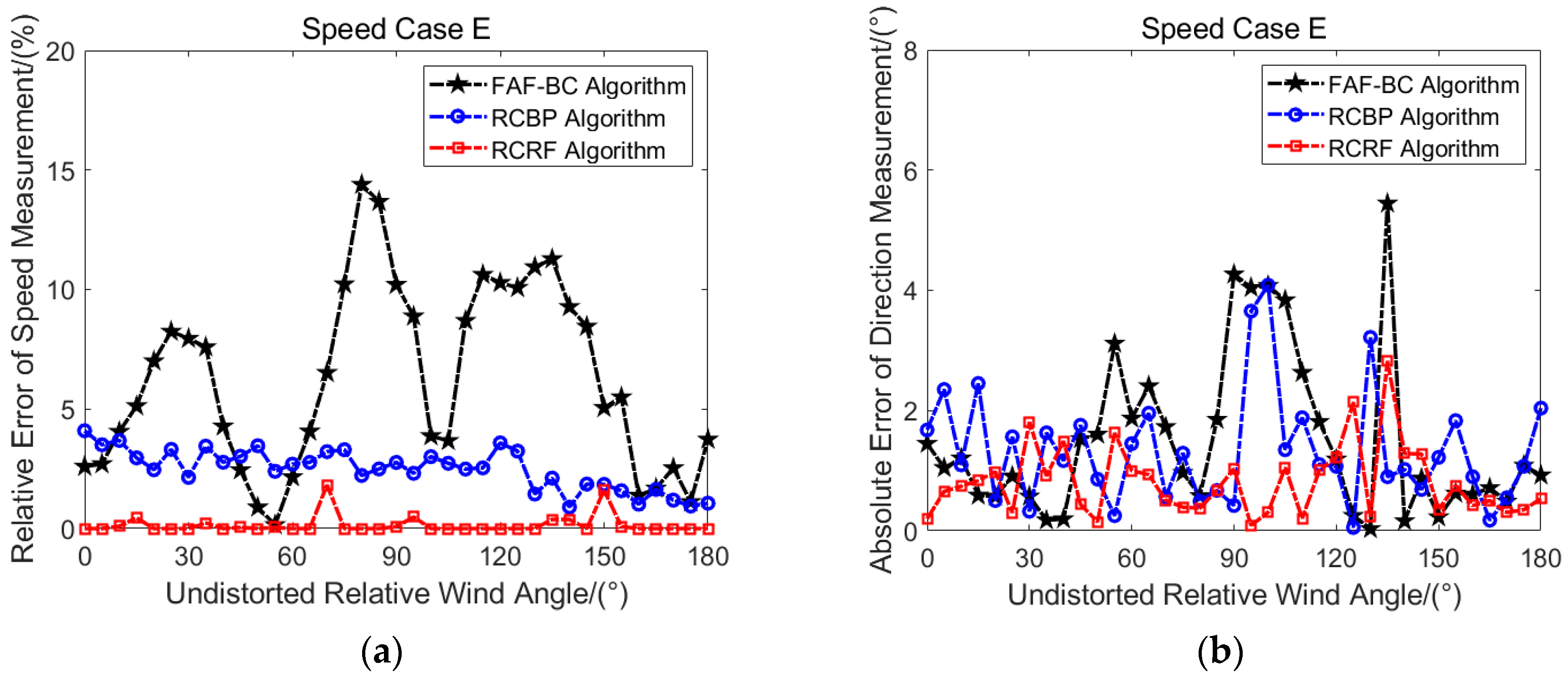
4.2. Quantitative Evaluation under Ideal Condition
4.3. Quantitative Evaluation under Noise Condition
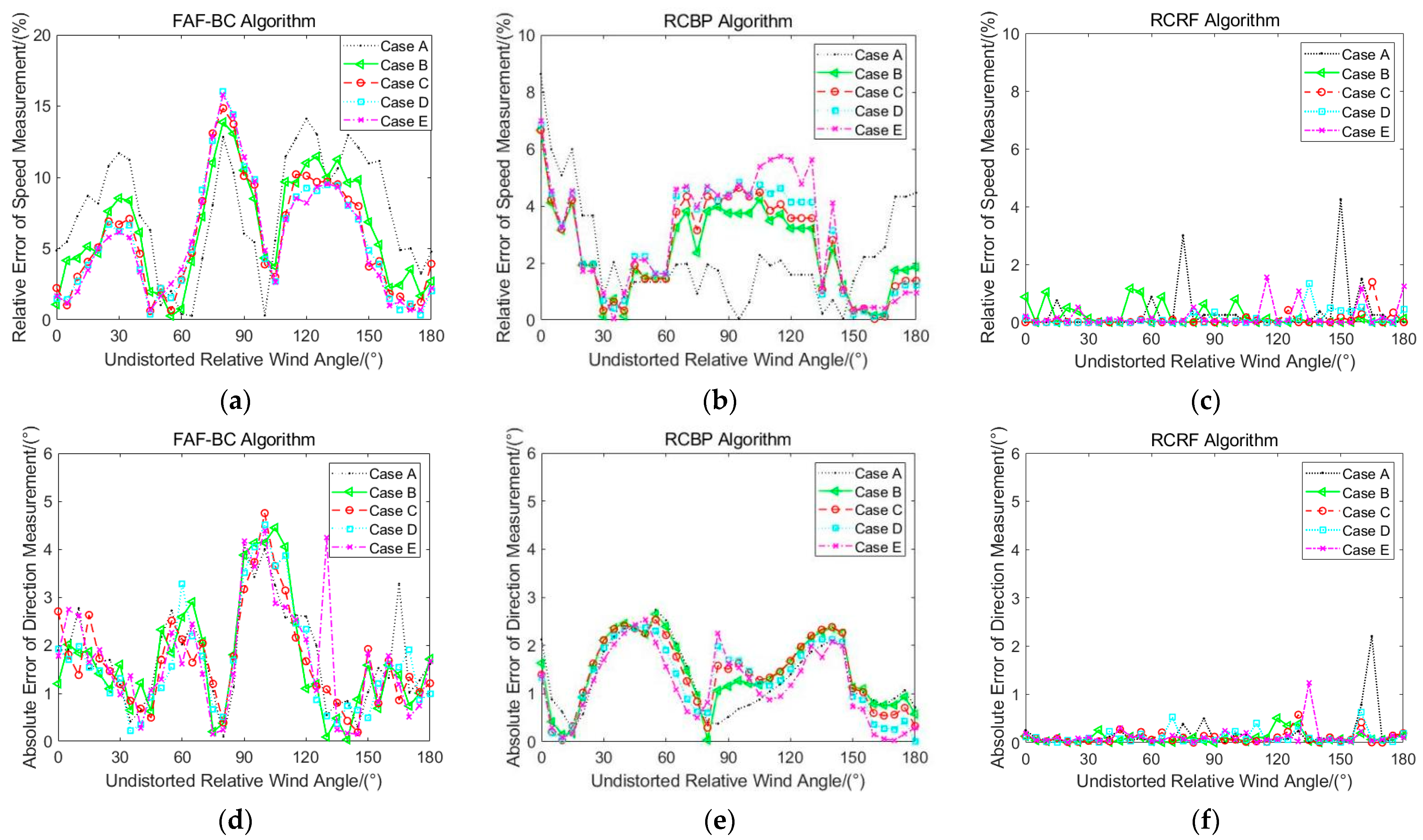
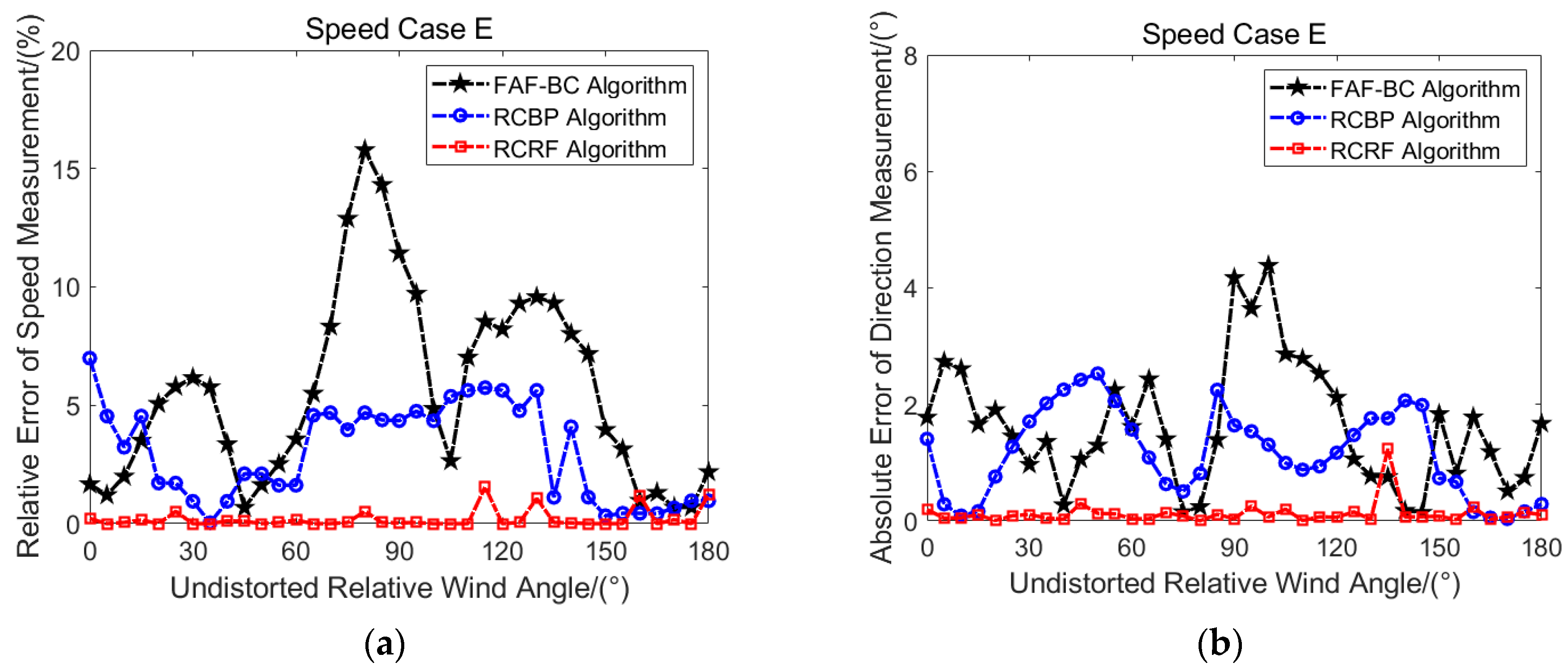
4.4. Quantitative Evaluation under Temporal Uncertainty Combined with Noise Condition
5. Conclusions
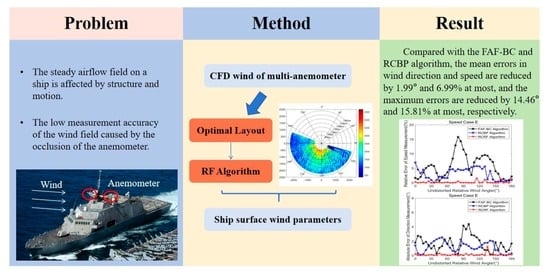
- A multivariate bias strategy based on the simulation database of the different monitoring points is proposed to obtain the optimal layout scheme in the case of a multi-anemometer arrangement on the ship surface.
- An improvement scheme for ship steady-state wind field estimation technology based on the random forest algorithm is proposed using the simulation data of a multi-anemometer optimal layout scheme.
- The wind direction retrieved by radar is combined with the anemometer-estimated value obtained from the random forest algorithm to acquire more accurate steady-state wind parameters on the ship’s surface .
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hess, R. Analysis of the aircraft carrier landing task, pilot+ Augmentation/Automation. IFAC-Pap. 2019, 51, 359–365. [Google Scholar] [CrossRef]
- Kumar, A.; Ben-Tzvi, P. Novel wireless sensing platform for experimental mapping and validation of ship air wake. Mechatronics 2018, 52, 58–69. [Google Scholar] [CrossRef]
- Lin, H.; Wu, S.; Liu, T.; Pan, K. Construction of the Operating Limits Diagram for a Ship-Based Helicopter Using the Design of Experiments with Computational Intelligence Techniques. Int. J. Aeronaut. Space Sci. 2021, 22, 1–16. [Google Scholar] [CrossRef]
- Newman, S. The Safety of Shipborne Helicopter Operation. Aircr. Eng. Aerosp. Technol. 2004, 76, 487–501. [Google Scholar] [CrossRef]
- Zhou, Z.; Huang, J.; Yi, M. Pruning Operator for Minimum Deck Wind in Carrier Aircraft Launch. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 655–664. [Google Scholar] [CrossRef]
- Chen, K.; Zhang, X.; Song, M.; He, Z. Anemometer Positioning Optimization for Flow Field Calculation in Wind Farm. J. Energy Eng. 2017, 143, 04017038. [Google Scholar] [CrossRef]
- Vicen-Bueno, R.; Horstmann, J.; Terril, E.; Paolo, T.; Dannenberg, J. Real-time ocean wind vector retrieval from marine radar image sequences acquired at grazing angle. J. Atmos. Ocean. Technol. 2013, 30, 127–139. [Google Scholar] [CrossRef]
- Gao, Y.; Tan, D.; Li, H.; Wang, J.; Liu, C. The Relationship between the Measurement Error of Shipborne Anemometer and Its Installation Location. Harbin Gongcheng Daxue Xuebao/J. Harbin Eng. Univ. 2014, 35, 1195–1200. [Google Scholar]
- Dubov, D.; Bohos, A.; Meline, A. Comparison of Wind Data Measurment Results of 3D Ultrasonic Anemometers and Calibrated Cup Anemometers Mounted on a Met Mast. In Proceedings of the Conference on Electrical Machines, Drives and Power Systems, Varna, Bulgaria, 6–8 June 2019. [Google Scholar]
- Ching, J. Ship’s influence on wind measurements determined from BOMEX mast and boom data. J. Appl. Meteorol. Climatol. 1976, 15, 102–106. [Google Scholar] [CrossRef]
- Polsky, S. A Computational Study of Unsteady Ship Airwake. In Proceedings of the 40th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 14–17 January 2002. [Google Scholar]
- Polsky, S. CFD Prediction of Airwake Flowfields for Ships Experiencing Beam Winds. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, USA, 23–26 June 2003. [Google Scholar]
- Polsky, S.; Christopher, W. Time-Accurate Computational Simulations of an LHA Ship Airwake. In Proceedings of the 18th Applied Aerodynamics Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar]
- Polsky, S.; Robin, I.; Ryan, C.; Terence, G. A Computational and Experimental Determination of the Air Flow around the Landing Deck of a US Navy Destroyer (DDG): Part II. In Proceedings of the 37th AIAA Fluid Dynamics Conference and Exhibit, Miami, FL, USA, 25–28 June 2007. [Google Scholar]
- Thornhill, E.; Wall, A.; Mctavish, S. Ship anemometer bias management. Ocean Eng. 2020, 216, 107843. [Google Scholar] [CrossRef]
- Yelland, M.; Moat, B.; Pascal, R.; Berry, D. CFD model estimates of the airflow distortion over research ships and the impact on momentum flux measurements. J. Atmos. Ocean. Technol. 2002, 19, 1477–1499. [Google Scholar] [CrossRef]
- Moat, B.; Yelland, M.; Pascal, R.; Molland, A. An overview of the airflow distortion at anemometer sites on ships. J. R. Meteorol. Soc. 2005, 25, 997–1006. [Google Scholar] [CrossRef]
- Moat, B.; Yelland, M.; Pascal, R.; Molland, A. Quantifying the airflow distortion over merchant ships. Part I: Validation of a CFD model. J. Atmos. Ocean. Technol. 2006, 23, 341–350. [Google Scholar] [CrossRef]
- Moat, B.; Yelland, M.; Molland, A. Quantifying the airflow distortion over merchant ships. Part II: Application of the model results. J. Atmos. Ocean. Technol. 2006, 23, 351–360. [Google Scholar] [CrossRef]
- O’Sullivan, N.; Landwehr, S.; Ward, B. Mapping flow distortion on oceanographic platforms using computational fluid dynamics. Ocean Sci. 2013, 9, 855–866. [Google Scholar] [CrossRef]
- O’Sullivan, N.; Landwehr, S.; Ward, B. Air-flow distortion and wave interactions on research vessels: An experimental and numerical comparison. Methods Oceanogr. 2015, 12, 1–17. [Google Scholar] [CrossRef]
- Thiebaux, M. Wind Tunnel Experiments to Determine Correction Functions for Shipborne Anemometers. Candaian Contract. Reoprt Hydrogr. Ocean Sci. 1990, 36, 57. [Google Scholar]
- Blanc, T. Superstructure Flow Distortion Corrections for Wind Speed and Direction Measurements Made from Tarawa Class (LHA1-LHA5) Ships. NRL Rep. 1986, 9005, 20375–25000. [Google Scholar]
- Blanc, T. The Effect of Inaccuracies in Weather-Ship Data on Bulk-Derived Estimates of Flux, Stability and Sea-Surface Roughness. J. Atmos. Ocean. Technol. 1986, 3, 12–26. [Google Scholar] [CrossRef]
- Zhang, Y. Multi-anemometer optimal layout and weighted fusion method for estimation of ship surface steady-state wind parameters. Ocean Eng. 2022, 266, 112793. [Google Scholar] [CrossRef]
- Blanc, T.; Larson, R. Superstructure Flow Distortion Corrections for Wind Speed and Direction Measurements Made from Nimitz Class (CVN68-CVN73) Ships; Naval Research Lab.: Washington, DC, USA, 1989; p. 28. [Google Scholar]
- Blanc, T. Superstructure Flow Distortion Corrections for Wind Speed and Direction Measurements Made from Virginia Class (CGN38-CGN41) Ships; Naval Research Lab.: Washington, DC, USA, 1987. [Google Scholar]
- Polsky, S.; Ghee, T.; Butler, J.; Czerwiec, R.; Colin, H. Application of CFD to Anemometer Position Evaluation: A Feasibility Study. In Proceedings of the 29th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 27–30 June 2011. [Google Scholar]
- Huang, W.; Liu, Y.; Eric, W. Texture-Analysis-Incorporated Wind Parameters Extraction from Rain-Contaminated X-Band Nautical Radar Images. Remote Sens. 2017, 9, 166. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, W. An Algorithm for Wind Direction Retrieval from X-Band Marine Radar Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 252–256. [Google Scholar] [CrossRef]
- Huang, W.; Liu, X.; Eric, W. Ocean Wind and Wave Measurements Using X-Band Marine Radar: A Comprehensive Review. Remote Sens. 2017, 9, 1261. [Google Scholar] [CrossRef]
- Wang, H.; Qiu, H.; Zhi, P.; Wang, L.; Chen, W.; Akhtar, R.; Muhammad, A. Study of Algorithms for Wind Direction Retrieval from X-Band Marine Radar Images. Electronics 2019, 8, 764. [Google Scholar] [CrossRef]
- Dankert, H.; Horstmann, J.; Rosenthal, W. Ocean Wind Fields Retrieved from Radar-Image Sequences. J. Geophys. Res. Ocean. 2003, 108, 1–11. [Google Scholar] [CrossRef]
- Wang, H.; Lu, Z. Determination of X-Band Radar Images Ocean Wind Direction Using ARM. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2015, 43, 6. [Google Scholar]
- Wang, H.; Qiu, H.; Lu, Z.; Wang, L.; Akhtar, R.; Wei, Y. An Energy Spectrum Algorithm for Wind Direction Retrieval from X-Band Marine Radar Image Sequences. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4074–4088. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Li, J.; Zhang, L.; Huang, W.; Eric, W. Wind direction estimation using small-aperture HF radar based on a circular array. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2745–2754. [Google Scholar] [CrossRef]
- Hisaki, Y. Short-wave directional properties in the vicinity of atmospheric and oceanic fronts. J. Geophys. Res. Ocean. 2002, 107, 9-1–9-15. [Google Scholar] [CrossRef]
- Huang, W.; Wang, Y. A Spectra-Analysis-Based Algorithm for Wind Speed Estimation from X-Band Nautical Radar Images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 701–705. [Google Scholar] [CrossRef]
- Huang, W.; Liu, X.; Eric, W. An empirical mode decomposition method for sea surface wind measurements from X-band nautical radar data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6218–6227. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Song, J. Bias corrections for Random Forest in regression using residual rotation. J. Korean Stat. Soc. 2015, 44, 321–326. [Google Scholar] [CrossRef]
- Xiang, L.; Gu, Y.; Wang, A. Foot Pronation Prediction with Inertial Sensors during Running: A Preliminary Application of Data-Driven Approaches. J. Hum. Kinet. 2023, 87, 29–40. [Google Scholar] [CrossRef] [PubMed]
- Jozwicki, D.; Sharma, P.; Mann, I. Segmentation of PMSE data using random forests. Remote Sens. 2022, 14, 2976. [Google Scholar] [CrossRef]
- Szentpali, B. Noise in solid state sensors. In Proceedings of the Second Inernational Symposium on Fluctuations and Noise, Maspalomas, Gran Canaria Island, Spain, 26–28 May 2004; Volume 5472, pp. 131–142. [Google Scholar]
- Jerath, K.; Sean, B.; Constantino, L. Bridging the gap between sensor noise modeling and sensor characterization. Measurement 2018, 116, 350–366. [Google Scholar] [CrossRef]
- Yan, Z. Research and Application on BP Neural Network Algorithm. In Proceedings of the 2015 International Industrial Informatics and Computer Engineering Conference, Xi’an, China, 10–11 January 2015; Atlantis Press: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Zeng, M. Application of the neural network in diagnosis of breast cancer based on levenberg-marquardt algorithm. In Proceedings of the 2017 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Shenzhen, China, 15–17 December 2017. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Point | X-Axis | Y-Axis | Z-Axis | Monitoring Point | X-Axis | Y-Axis | Z-Axis |
|---|---|---|---|---|---|---|---|
| 1 | 0.0 m | −3 m | 11.5 m | 13 | −4.6 m | −3 m | 11.5 m |
| 2 | 0.0 m | −4 m | 11.5 m | 14 | −4.6 m | −4 m | 11.5 m |
| 3 | 0.0 m | −5 m | 11.5 m | 15 | −4.6 m | −5 m | 11.5 m |
| 4 | 0.0 m | −6 m | 11.5 m | 16 | −4.6 m | −6 m | 11.5 m |
| 5 | 0.0 m | −7 m | 11.5 m | 17 | −4.6 m | −7 m | 11.5 m |
| 6 | 0.0 m | −8 m | 11.5 m | 18 | −4.6 m | −8 m | 11.5 m |
| 7 | 0.0 m | 3 m | 11.5 m | 19 | −4.6 m | 3 m | 11.5 m |
| 8 | 0.0 m | 4 m | 11.5 m | 20 | −4.6 m | 4 m | 11.5 m |
| 9 | 0.0 m | 5 m | 11.5 m | 21 | −4.6 m | 5 m | 11.5 m |
| 10 | 0.0 m | 6 m | 11.5 m | 22 | −4.6 m | 6 m | 11.5 m |
| 11 | 0.0 m | 7 m | 11.5 m | 23 | −4.6 m | 7 m | 11.5 m |
| 12 | 0.0 m | 8 m | 11.5 m | 24 | −4.6 m | 8 m | 11.5 m |
| Radar Parameters | Performance |
|---|---|
| Electromagnetic Wave Frequency | 9410 30 MHz |
| Antenna Angular Speed | r.p.m |
| Antenna Height | 25 m |
| Polarization | HH |
| Horizontal Beam Width | ≤ |
| Vertical Beam Width | |
| Range Resolution | 7.5 m |
| Pulse Repetition Frequency | Short Pulse: Hz |
| Pulse Width | |
| RF Pulse Envelope Width | |
| RF Pulse Peak Power | Short Pulse: W |
| Receiver IF Bandwidth | Short Pulse: Hz |
| Azimuth Resolution | 1.8 m Antenna: |
| Measuring Parameters | Measuring Range | Measurement Accuracy | Resolving Power |
|---|---|---|---|
| Wind Direction | 0~360° | ±3° | 1° |
| Wind Speed | 0~60 m/s | ±0.3 m/s | 0.1 m/s |
| Condition | Method | Mean Error | Maximum Error | ||
|---|---|---|---|---|---|
| MRE (%) | MAE (°) | MRE (%) | MAE (°) | ||
| Ideal condition | FAF-BC algorithm | 5.30 | 1.29 | −16.98~+8.37 | −6.11~+2.57 |
| RCBP algorithm | 2.36 | 0.85 | −9.26~+4.60 | −2.52~+2.52 | |
| RCRF algorithm | 0.13 | 0.11 | −1.17~+1.67 | −3.15~+1.85 | |
| Condition | Method | Mean Error | Maximum Error | ||
|---|---|---|---|---|---|
| MRE (%) | MAE (°) | MRE (%) | MAE (°) | ||
| Noise condition | FAF-BC algorithm | 6.27 | 1.72 | −16.02~+14.11 | −4.23~+4.75 |
| RCBP algorithm | 2.62 | 1.34 | −8.63~+5.74 | −2.53~+2.74 | |
| RCRF algorithm | 0.18 | 0.13 | −1.67~+4.25 | −2.24~+0.53 | |
| Condition | Method | Mean Error | Maximum Error | ||
|---|---|---|---|---|---|
| MRE (%) | MAE (°) | MRE (%) | MAE (°) | ||
| Temporal uncertainty combined noise condition | FAF-BC algorithm | 7.16 | 2.50 | −14.44~+16.71 | −4.97~+7.29 |
| RCBP algorithm | 4.26 | 2.50 | +0.79~+12.92 | −5.06~+8.27 | |
| RCRF algorithm | 0.17 | 0.51 | −1.83~+2.25 | −2.83~+2.53 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Lu, Z.; Tian, C.; Wei, Y.; Liu, F. A Method for Estimating Ship Surface Wind Parameters by Combining Anemometer and X-Band Marine Radar Data. Remote Sens. 2023, 15, 5392. https://doi.org/10.3390/rs15225392
Zhang Y, Lu Z, Tian C, Wei Y, Liu F. A Method for Estimating Ship Surface Wind Parameters by Combining Anemometer and X-Band Marine Radar Data. Remote Sensing. 2023; 15(22):5392. https://doi.org/10.3390/rs15225392
Chicago/Turabian StyleZhang, Yuying, Zhizhong Lu, Congying Tian, Yanbo Wei, and Fanming Liu. 2023. "A Method for Estimating Ship Surface Wind Parameters by Combining Anemometer and X-Band Marine Radar Data" Remote Sensing 15, no. 22: 5392. https://doi.org/10.3390/rs15225392
APA StyleZhang, Y., Lu, Z., Tian, C., Wei, Y., & Liu, F. (2023). A Method for Estimating Ship Surface Wind Parameters by Combining Anemometer and X-Band Marine Radar Data. Remote Sensing, 15(22), 5392. https://doi.org/10.3390/rs15225392