Author Contributions
Conceptualization, F.L., D.M. and H.S.; methodology, F.L.; software, F.L.; validation, F.L., D.M. and H.S.; formal analysis, F.L.; investigation, F.L. and D.M.; data curation, F.L. and D.M.; writing—original draft preparation, F.L.; writing—review and editing, D.M., H.S., A.E. and H.-G.M.; visualization, F.L.; supervision, H.-G.M.; project administration, H.-G.M.; funding acquisition, H.-G.M. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Pinhole model. The corresponding X axis is colored red, Y in green and Z in blue. The ray from the object point into the image is depicted in magenta. The principal point is the perpendicular foot of the projection center onto the image.
Figure 1.
Pinhole model. The corresponding X axis is colored red, Y in green and Z in blue. The ray from the object point into the image is depicted in magenta. The principal point is the perpendicular foot of the projection center onto the image.
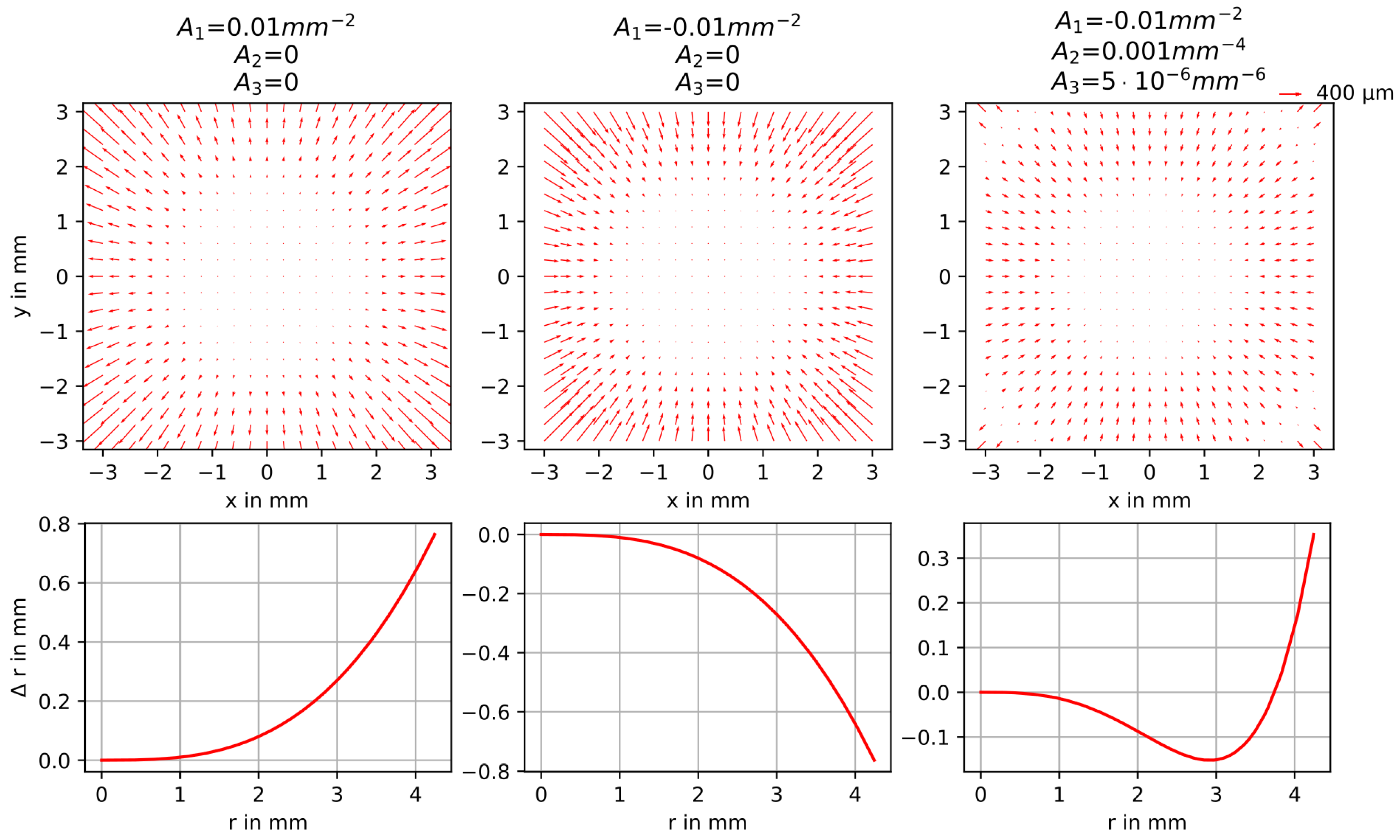
Figure 2.
Upper part: Correction vectors for symmetric radial lens distortion for different parameter examples of a virtual camera. Lower part: Corresponding radial corrections as a function of the image radius.
Figure 2.
Upper part: Correction vectors for symmetric radial lens distortion for different parameter examples of a virtual camera. Lower part: Corresponding radial corrections as a function of the image radius.
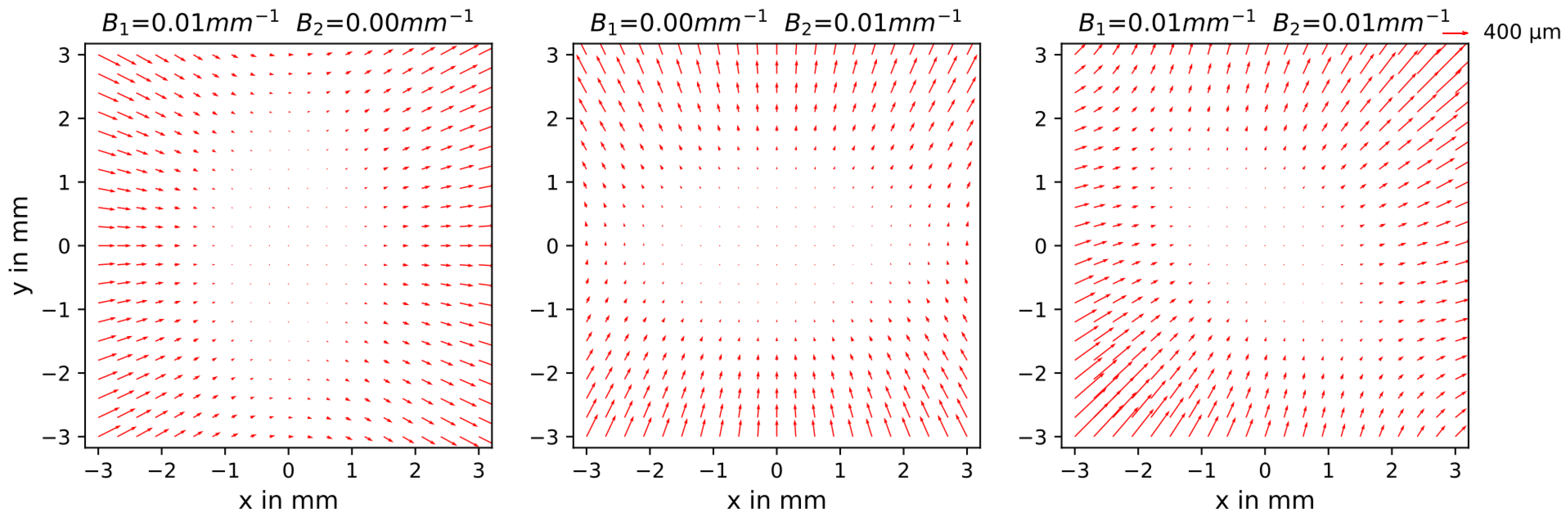
Figure 3.
Correction vectors for decentering lens distortion of a virtual camera for different parameter examples.
Figure 3.
Correction vectors for decentering lens distortion of a virtual camera for different parameter examples.
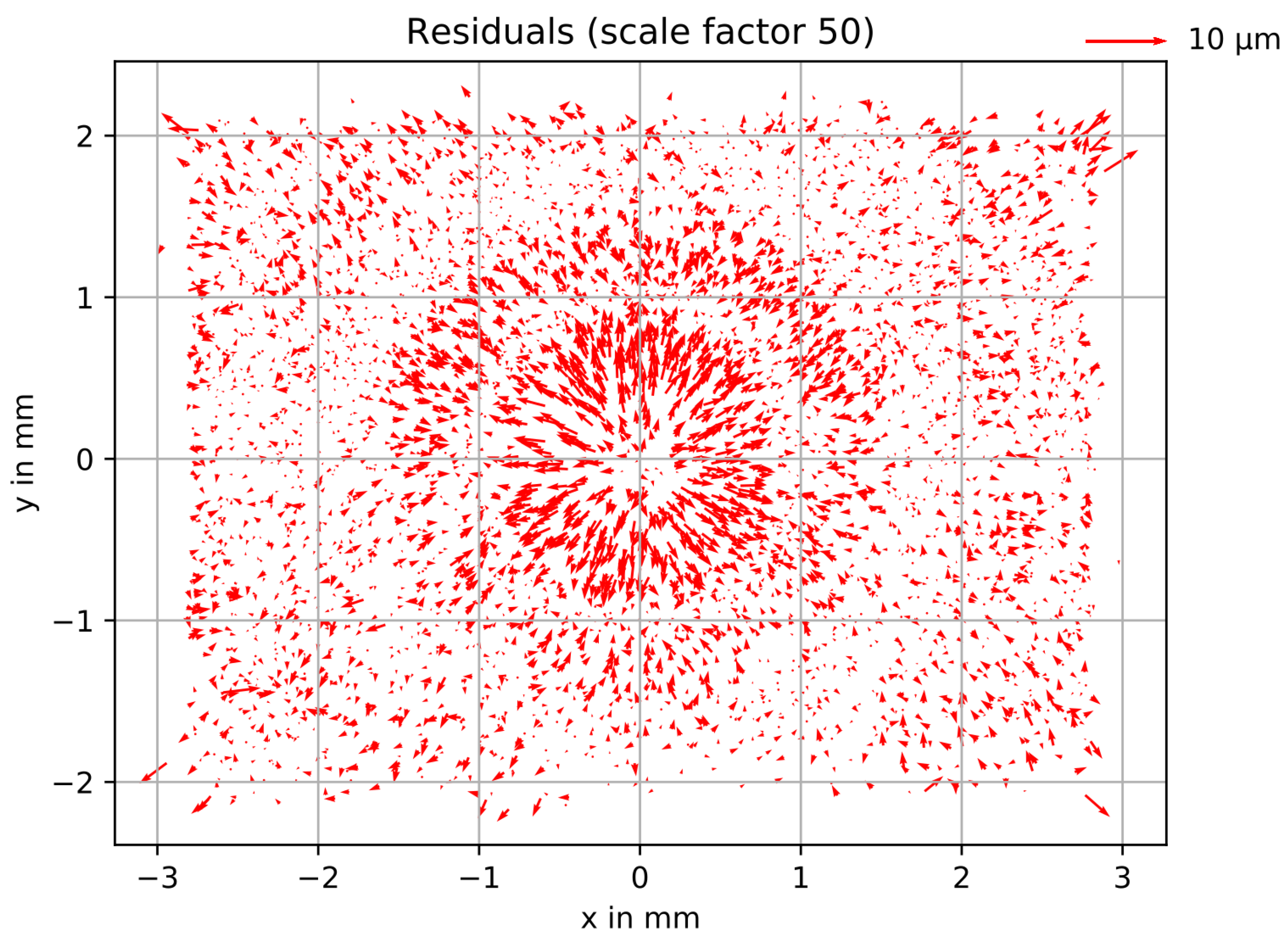
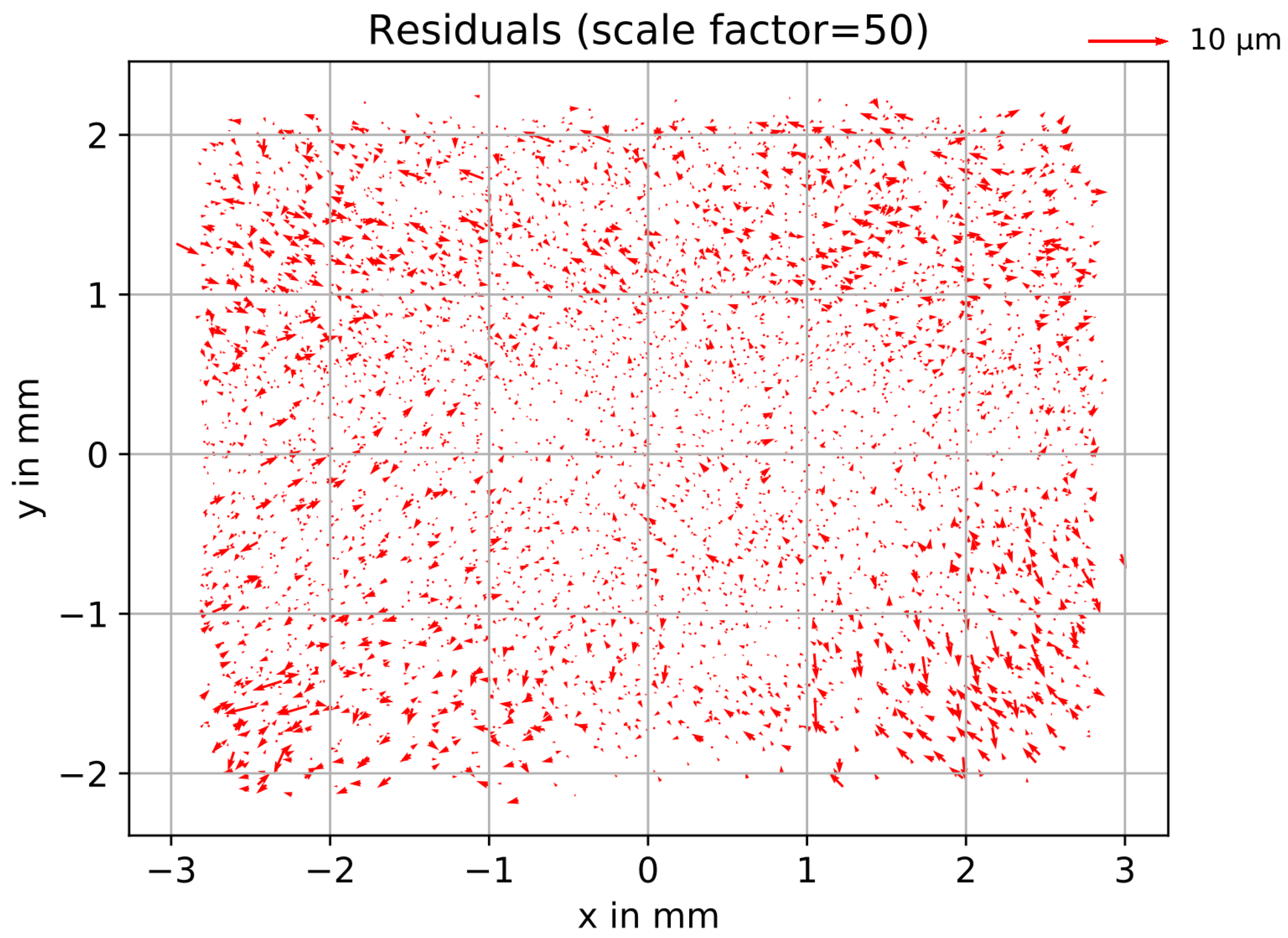
Figure 4.
Residual plot after free net bundle adjustment using model B.
Figure 4.
Residual plot after free net bundle adjustment using model B.
Figure 5.
(a) Reference target field used for bundle adjustments. (b) Orientation of the images of the Panasonic Lumix DMC-GX80 camera and locations of the object points. The schematic illustration was created with the software package AICON 3D Studio (version 12.50.03).
Figure 5.
(a) Reference target field used for bundle adjustments. (b) Orientation of the images of the Panasonic Lumix DMC-GX80 camera and locations of the object points. The schematic illustration was created with the software package AICON 3D Studio (version 12.50.03).
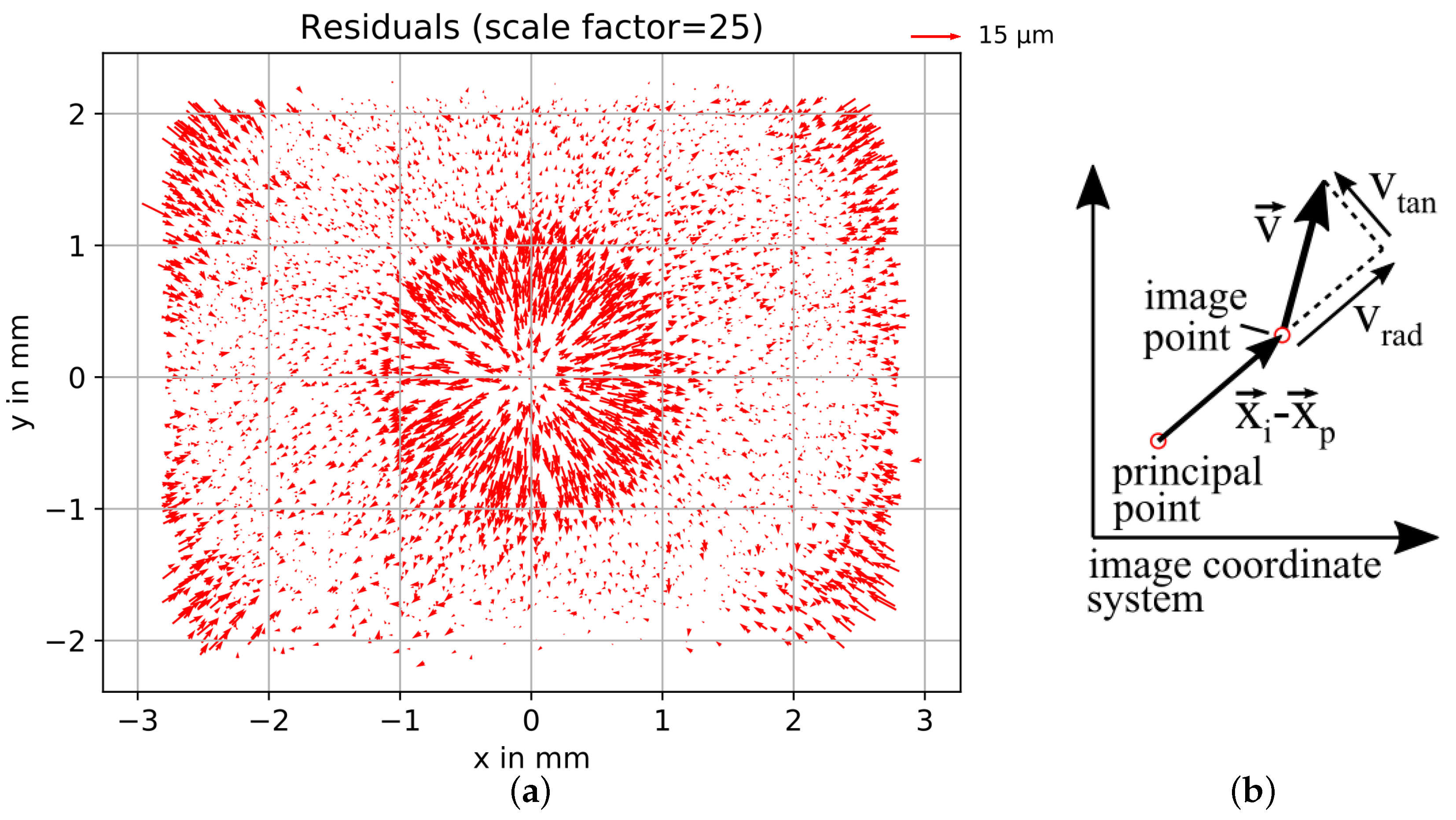
Figure 6.
(a) Residual plot after bundle adjustment using model A (i.e., pure pinhole model) with fixed object coordinates. (b) Decomposition of the residual vector into radial and tangential components.
Figure 6.
(a) Residual plot after bundle adjustment using model A (i.e., pure pinhole model) with fixed object coordinates. (b) Decomposition of the residual vector into radial and tangential components.
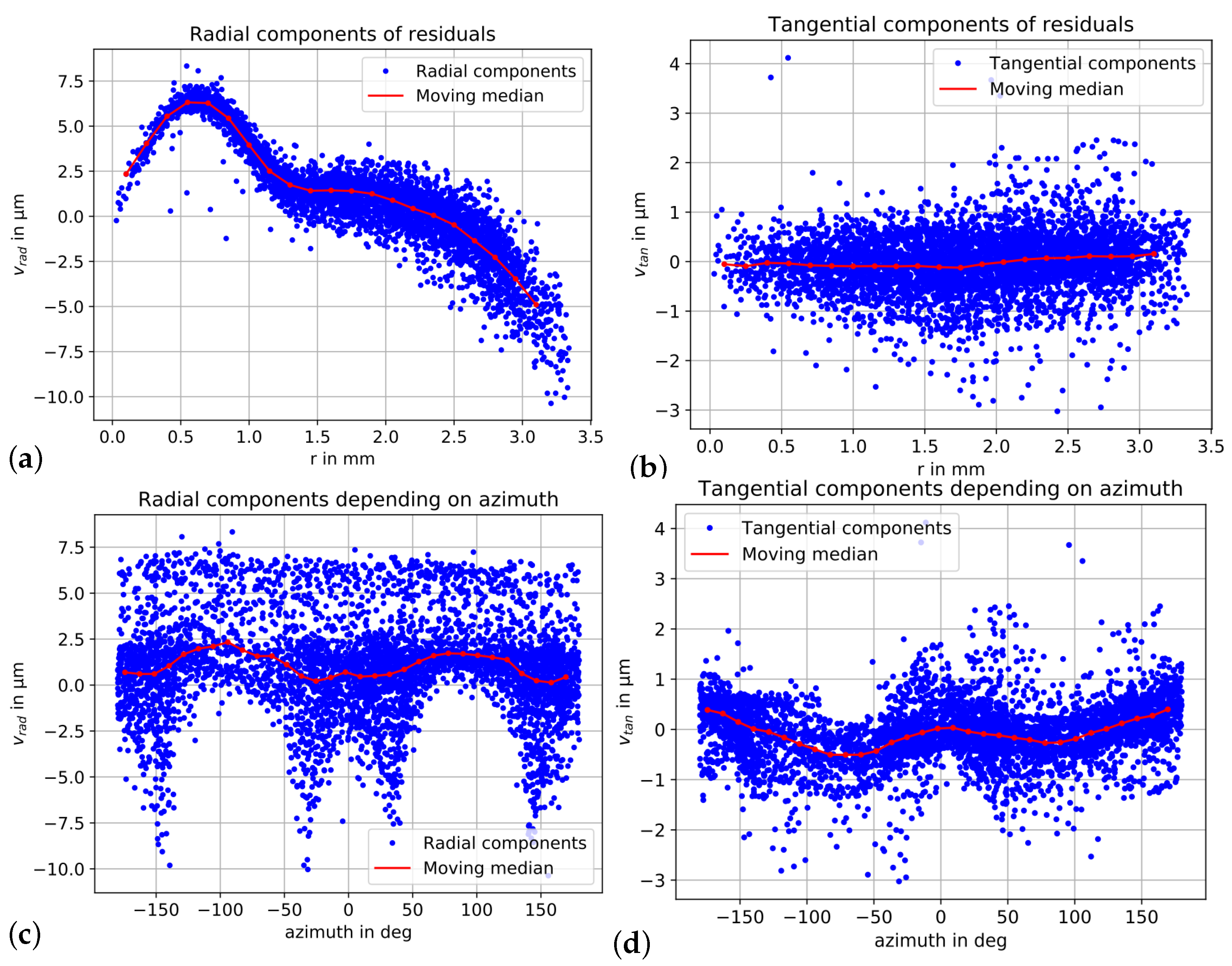
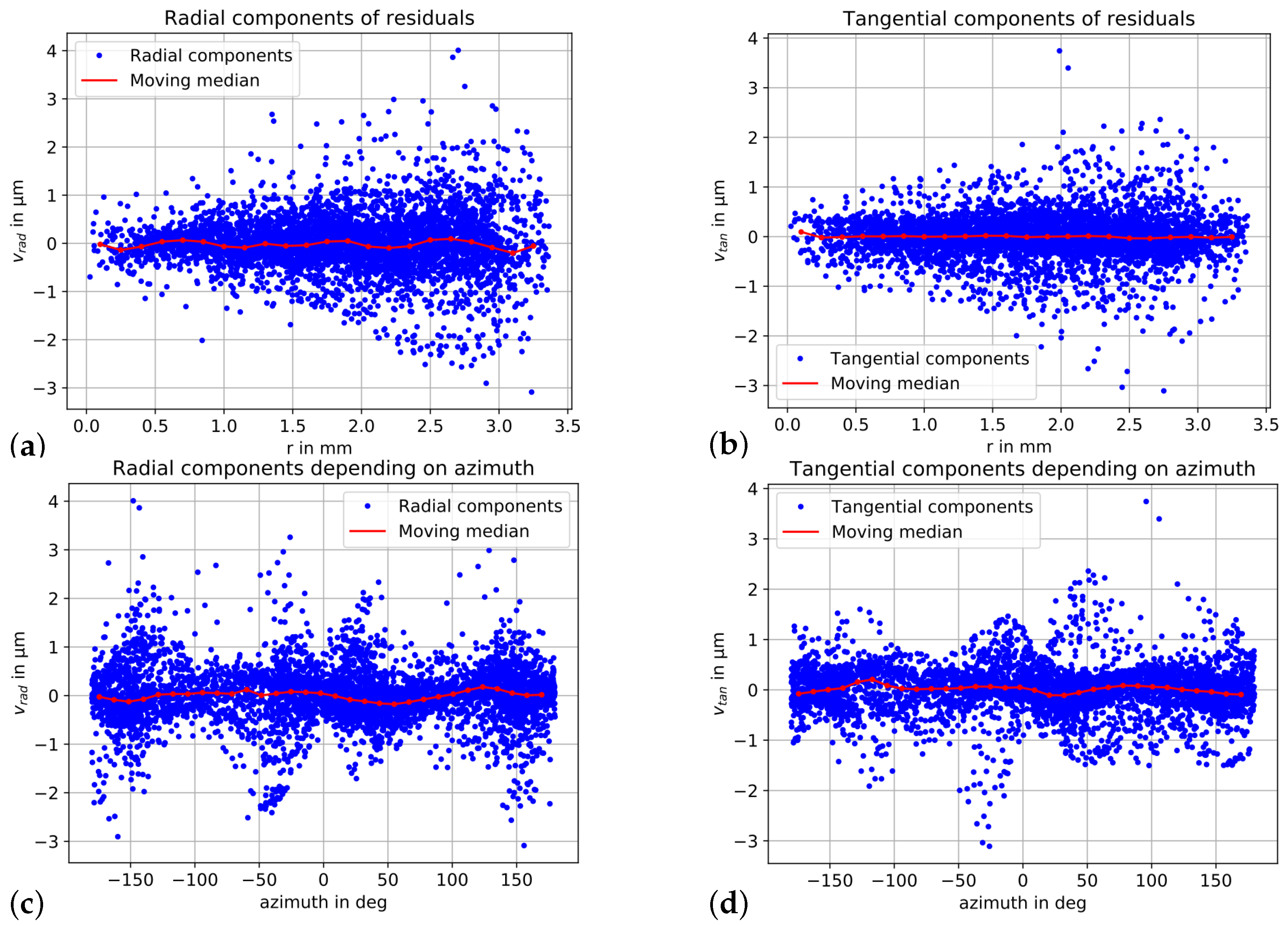
Figure 7.
(a) Radial components of the residuals plotted against the image radius. (b) Tangential components of the residuals plotted against the image radius. (c) Radial components plotted against the azimuth of the image point. (d) Tangential components plotted against the azimuth of the image point. For all subplots, the moving median is shown in red.
Figure 7.
(a) Radial components of the residuals plotted against the image radius. (b) Tangential components of the residuals plotted against the image radius. (c) Radial components plotted against the azimuth of the image point. (d) Tangential components plotted against the azimuth of the image point. For all subplots, the moving median is shown in red.
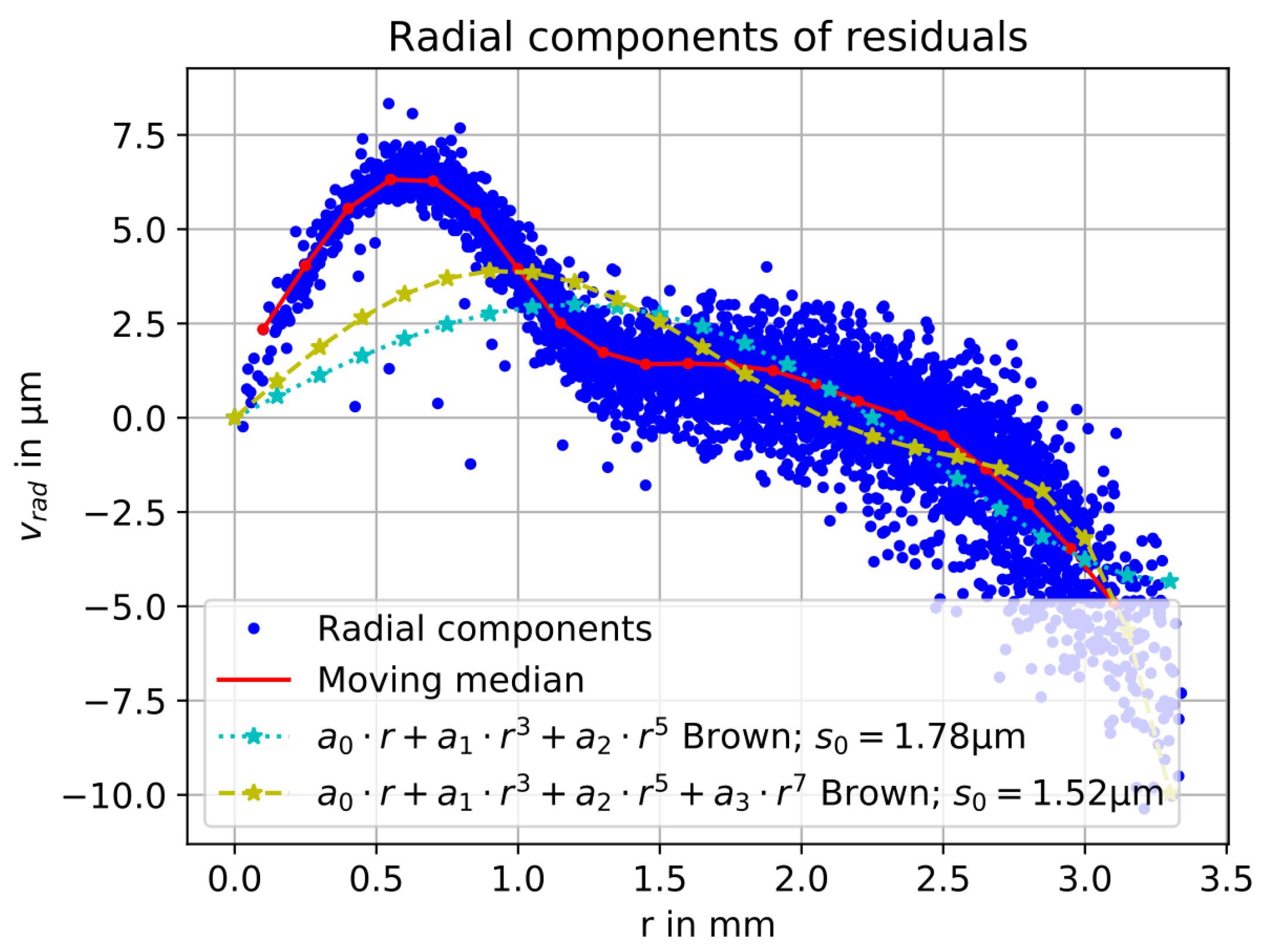
Figure 8.
Radial components and fitted Brown polynomials with standard deviations of the unit weight of the polynomial fit.
Figure 8.
Radial components and fitted Brown polynomials with standard deviations of the unit weight of the polynomial fit.
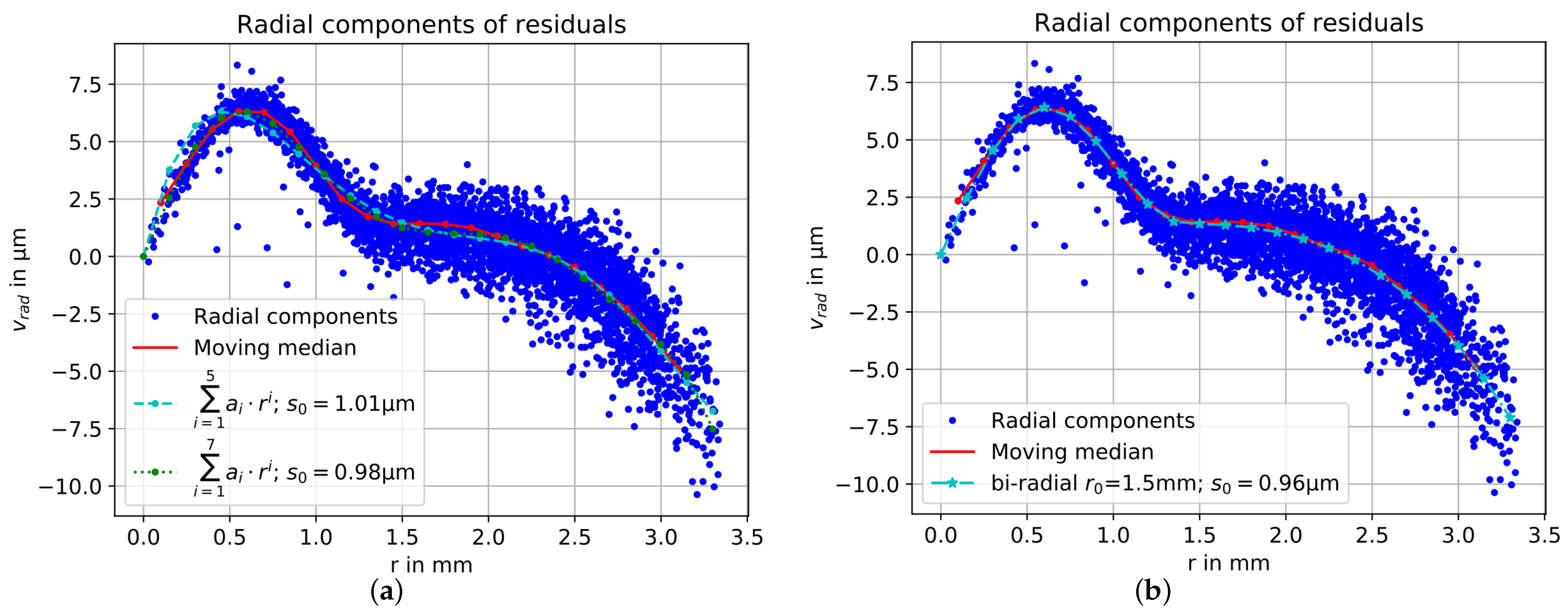
Figure 9.
(
a) Radial components and fitted polynomials with Equations (
11) and (
12). (
b) Radial components and fitted bi-radial polynomials of Equation (
13). Both with standard deviations of the unit weight of the polynomial fit.
Figure 9.
(
a) Radial components and fitted polynomials with Equations (
11) and (
12). (
b) Radial components and fitted bi-radial polynomials of Equation (
13). Both with standard deviations of the unit weight of the polynomial fit.
Figure 10.
Residual plot after bundle adjustment with fixed object coordinates using model C.
Figure 10.
Residual plot after bundle adjustment with fixed object coordinates using model C.
Figure 11.
Residual plot after bundle adjustment with fixed object coordinates using model D.
Figure 11.
Residual plot after bundle adjustment with fixed object coordinates using model D.
Figure 12.
Residuals after bundle adjustment using model C. (a) Radial components versus image radius. (b) Tangential components versus image radius. (c) Radial components versus the azimuth of the image point. (d) Tangential components versus the azimuth of the image point. For all subplots, the moving median is shown in red.
Figure 12.
Residuals after bundle adjustment using model C. (a) Radial components versus image radius. (b) Tangential components versus image radius. (c) Radial components versus the azimuth of the image point. (d) Tangential components versus the azimuth of the image point. For all subplots, the moving median is shown in red.
Figure 13.
Residuals after bundle adjustment using model D: (a) Radial components versus image radius. (b) Tangential components versus image radius. (c) Radial components versus the azimuth of the image point. (d) Tangential components versus the azimuth of the image point. For all subplots, the moving median is shown in red.
Figure 13.
Residuals after bundle adjustment using model D: (a) Radial components versus image radius. (b) Tangential components versus image radius. (c) Radial components versus the azimuth of the image point. (d) Tangential components versus the azimuth of the image point. For all subplots, the moving median is shown in red.
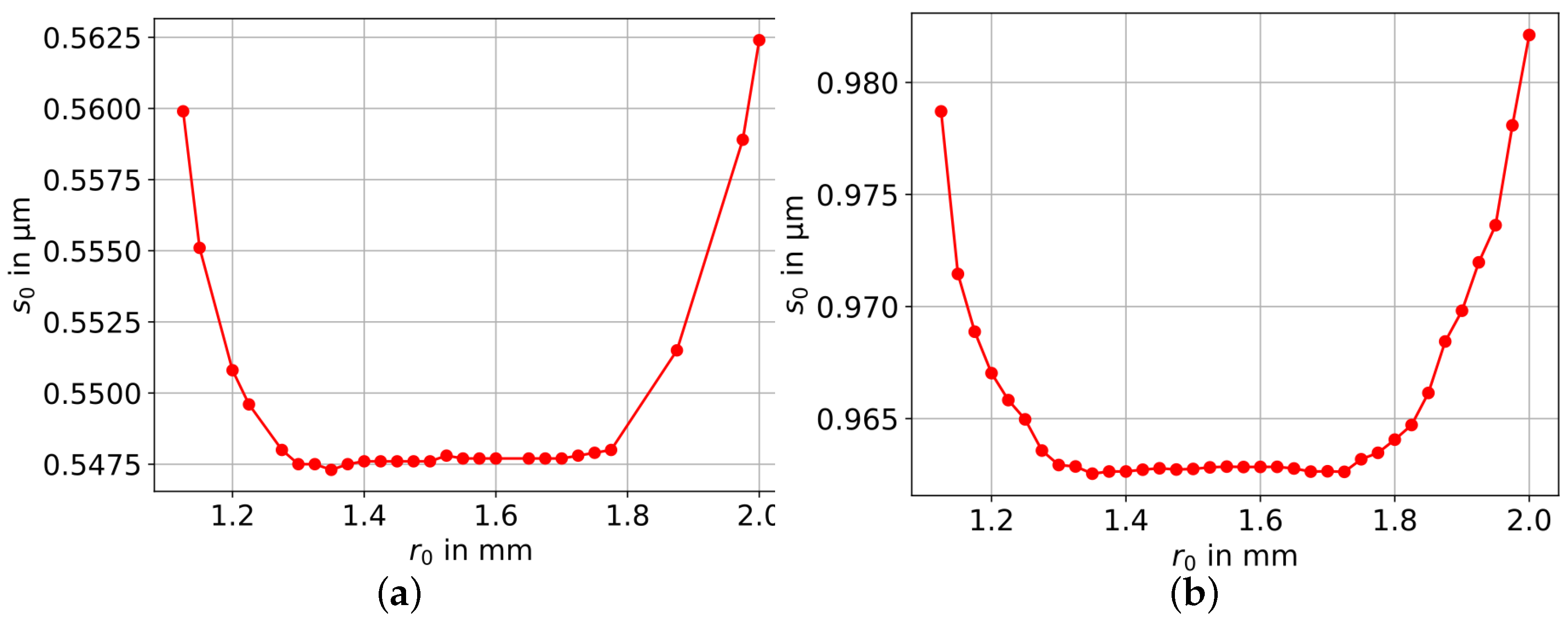
Figure 14.
(a) Standard deviation of the unit weight of the bundle adjustment as a function of . (b) Standard deviation of the unit weight of the polynomial fit as a function of .
Figure 14.
(a) Standard deviation of the unit weight of the bundle adjustment as a function of . (b) Standard deviation of the unit weight of the polynomial fit as a function of .
Figure 15.
Object points and scale bars as well as the image orientations (illustration created with AICON 3D Studio (version 12.50.03)).
Figure 15.
Object points and scale bars as well as the image orientations (illustration created with AICON 3D Studio (version 12.50.03)).
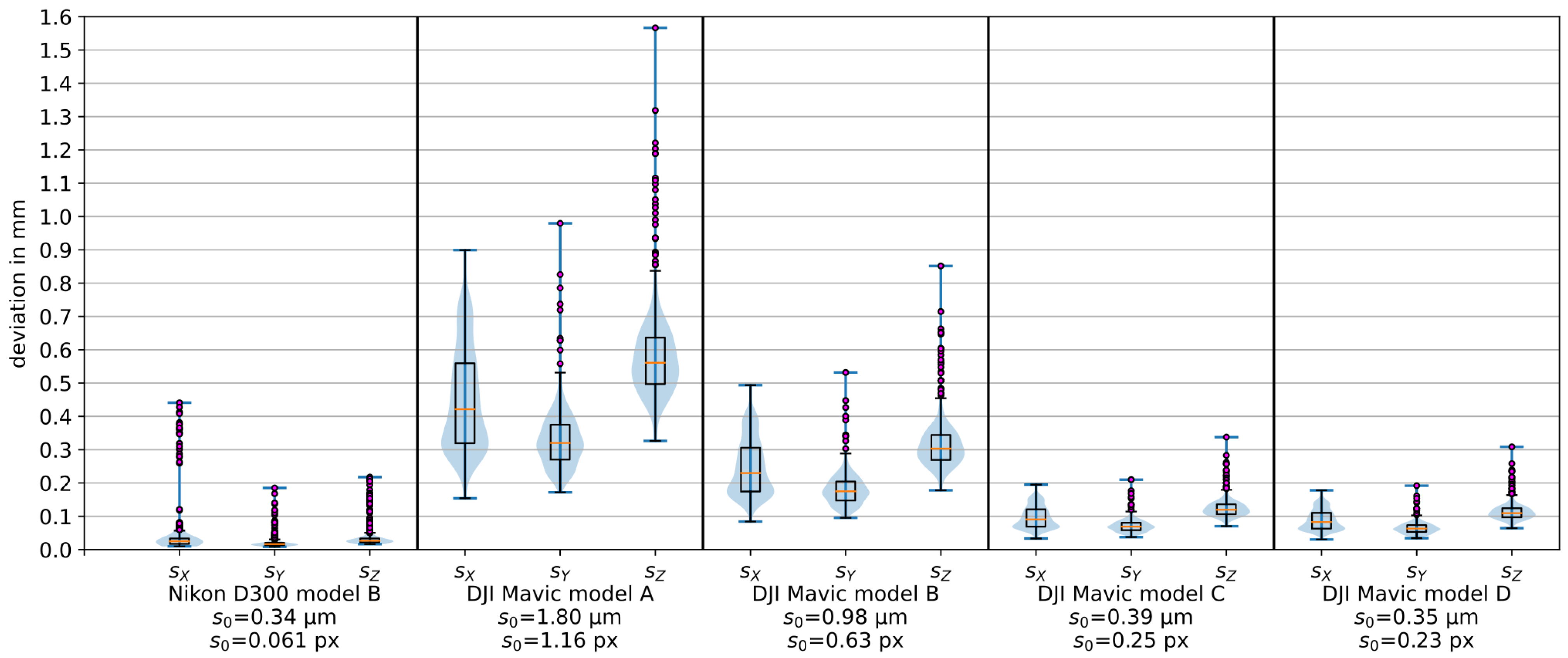
Figure 16.
Combined violin and box plots of the object coordinates’ standard deviations computed in the bundle adjustment and corresponding standard deviation of the unit weight () in mm and in px.
Figure 16.
Combined violin and box plots of the object coordinates’ standard deviations computed in the bundle adjustment and corresponding standard deviation of the unit weight () in mm and in px.
Figure 17.
Residuals (left side, scale factor 300) and combined violin and box plots (right side) for the residuals’ lengths of the rigid body transformation between: (a) DJI Mavic Pro camera (model B) and Nikon D300 camera (model B), (b) DJI Mavic Pro camera (model C) and Nikon D300 camera (model B), (c) DJI Mavic Pro camera (model D) and Nikon D300 camera (model B).
Figure 17.
Residuals (left side, scale factor 300) and combined violin and box plots (right side) for the residuals’ lengths of the rigid body transformation between: (a) DJI Mavic Pro camera (model B) and Nikon D300 camera (model B), (b) DJI Mavic Pro camera (model C) and Nikon D300 camera (model B), (c) DJI Mavic Pro camera (model D) and Nikon D300 camera (model B).
Table 1.
Sensor specifications for the DJI Mavic Pro camera.
Table 1.
Sensor specifications for the DJI Mavic Pro camera.
| Model | DJI Mavic Pro FC220 |
| Sensor size in px | 4000 × 3000 px |
| Sensor size in mm | 6.2 mm × 4.65 mm 1 |
| Company | DJI |
Table 2.
Interior orientation parameters of Model C, their standard deviation and significance.
Table 2.
Interior orientation parameters of Model C, their standard deviation and significance.
| Parameter | Estimated Value | Standard Deviation | Significance |
|---|
| c | 4.6894 mm | 0.0031 mm | 1500 |
| −0.03608 mm | 0.00029 mm | 120 |
| 0.00121 mm | 0.00021 mm | 5.8 |
| −0.0278 mm | 0.0028 mm | 9.9 |
| 0.1061 mm | 0.0045 mm | 24 |
| −0.1074 mm | 0.0036 mm | 30 |
| 0.0499 mm | 0.0015 mm | 33 |
| −0.01110 mm | 0.00033 mm | 34 |
| 0.000960 mm | 0.000029 mm | 34 |
| 0.0000739 mm | 0.0000049 mm | 15 |
| −0.0000457 mm | 0.0000035 mm | 13 |
| 0.000054 | 0.000011 | 5.1 |
| −0.0003508 | 0.0000099 | 36 |
Table 3.
Correlations between the parameters of model C.
Table 3.
Correlations between the parameters of model C.
| | c | | | | | | | | | | | | |
| c | 1 | | | | | | | | | | | | |
| 0.003 | 1 | | | | | | | | | | | |
| −0.02 | 0.042 | 1 | | | | | | | | | | |
| −0.971 | 0.011 | −0.002 | 1 | | | | | | | | | |
| 0.93 | −0.014 | 0.006 | −0.988 | 1 | | | | | | | | |
| −0.88 | 0.016 | −0.009 | 0.959 | −0.991 | 1 | | | | | | | |
| 0.828 | −0.018 | 0.012 | −0.923 | 0.97 | −0.994 | 1 | | | | | | |
| −0.778 | 0.018 | −0.014 | 0.883 | −0.943 | 0.978 | −0.995 | 1 | | | | | |
| 0.73 | −0.019 | 0.016 | −0.843 | 0.912 | −0.957 | 0.983 | −0.996 | 1 | | | | |
| −0.025 | 0.888 | 0.048 | 0.024 | −0.026 | 0.026 | −0.025 | 0.024 | −0.023 | 1 | | | |
| 0.009 | 0.053 | 0.722 | −0.008 | 0.008 | −0.007 | 0.006 | −0.004 | 0.003 | 0.045 | 1 | | |
| 0.019 | 0.029 | 0.076 | 0.008 | −0.012 | 0.016 | −0.019 | 0.022 | −0.024 | 0.02 | 0.084 | 1 | |
| 0.027 | −0.052 | −0.056 | −0.026 | 0.025 | −0.024 | 0.023 | −0.021 | 0.02 | −0.017 | 0 | 0.008 | 1 |
Table 4.
Interior orientation parameters of Model D, their standard deviation and significance.
Table 4.
Interior orientation parameters of Model D, their standard deviation and significance.
| Parameter | Estimated Value | Standard Deviation | Significance |
|---|
| c | 4.75027 mm | 0.00055 mm | 8600 |
| −0.03619 mm | 0.00028 mm | 130 |
| 0.00125 mm | 0.00020 mm | 6.2 |
| −0.01530 mm | 0.00015 mm | 99 |
| 0.01959 mm | 0.00037 mm | 53 |
| −0.00776 mm | 0.00031 mm | 25 |
| 0.000978 mm | 0.000079 mm | 12 |
| 0.000344 mm | 0.000045 mm | 7.7 |
| −0.0000056 mm | 0.0000074 mm | 0.76 |
| 0.00000101 mm | 0.00000038 mm | 2.6 |
| 0.0000702 mm | 0.0000046 mm | 15 |
| −0.0000441 mm | 0.0000032 mm | 14 |
| 0.000049 | 0.000010 | 4.9 |
| −0.0003453 | 0.0000094 | 37 |
| 1.5 mm | | |
Table 5.
Correlations between the parameters of model D.
Table 5.
Correlations between the parameters of model D.
| | c | | | | | | | | | | | | | |
| c | 1 | | | | | | | | | | | | | |
| 0.062 | 1 | | | | | | | | | | | | |
| −0.102 | 0.041 | 1 | | | | | | | | | | | |
| −0.368 | 0.005 | −0.005 | 1 | | | | | | | | | | |
| −0.013 | −0.006 | 0.011 | −0.795 | 1 | | | | | | | | | |
| 0.008 | 0.002 | −0.008 | 0.732 | −0.98 | 1 | | | | | | | | |
| −0.004 | −0.001 | 0.006 | −0.679 | 0.944 | −0.99 | 1 | | | | | | | |
| −0.692 | −0.008 | 0.013 | 0.523 | 0.011 | −0.008 | 0.005 | 1 | | | | | | |
| 0.667 | 0.007 | −0.019 | −0.508 | −0.011 | 0.008 | −0.005 | −0.991 | 1 | | | | | |
| −0.638 | −0.006 | 0.022 | 0.489 | 0.01 | −0.007 | 0.004 | 0.969 | −0.993 | 1 | | | | |
| −0.02 | 0.888 | 0.047 | 0.014 | −0.009 | 0.005 | −0.002 | 0.003 | −0.003 | 0.003 | 1 | | | |
| 0.012 | 0.052 | 0.718 | −0.008 | −0.001 | 0.002 | −0.003 | −0.022 | 0.018 | −0.016 | 0.044 | 1 | | |
| 0.148 | 0.028 | 0.076 | −0.011 | −0.001 | −0.001 | 0.001 | −0.02 | −0.004 | 0.019 | 0.019 | 0.084 | 1 | |
| 0.008 | −0.054 | −0.058 | −0.001 | −0.004 | 0.005 | −0.007 | −0.006 | 0.005 | −0.004 | −0.019 | −0.002 | 0.008 | 1 |
Table 6.
Standard deviation of the unit weight after the bundle adjustment with fixed object coordinates and considering different models describing lens distortions.
Table 6.
Standard deviation of the unit weight after the bundle adjustment with fixed object coordinates and considering different models describing lens distortions.
| Model | after Bundle Adjustment |
|---|
| Model A (pure pinhole model) | 0.00211 mm 1.37 px |
| Model B (standard distortion model—Brown) | 0.00098 mm 0.64 px |
| Model C according to [15] | 0.00057 mm 0.37 px |
| Model D (bi-radial mm—our method) | 0.00054 mm 0.35 px |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}