


Evaluating the Effects of UAS Flight Speed on Lidar Snow Depth Estimation in a Heterogeneous Landscape



Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. UAS Lidar Acquisition
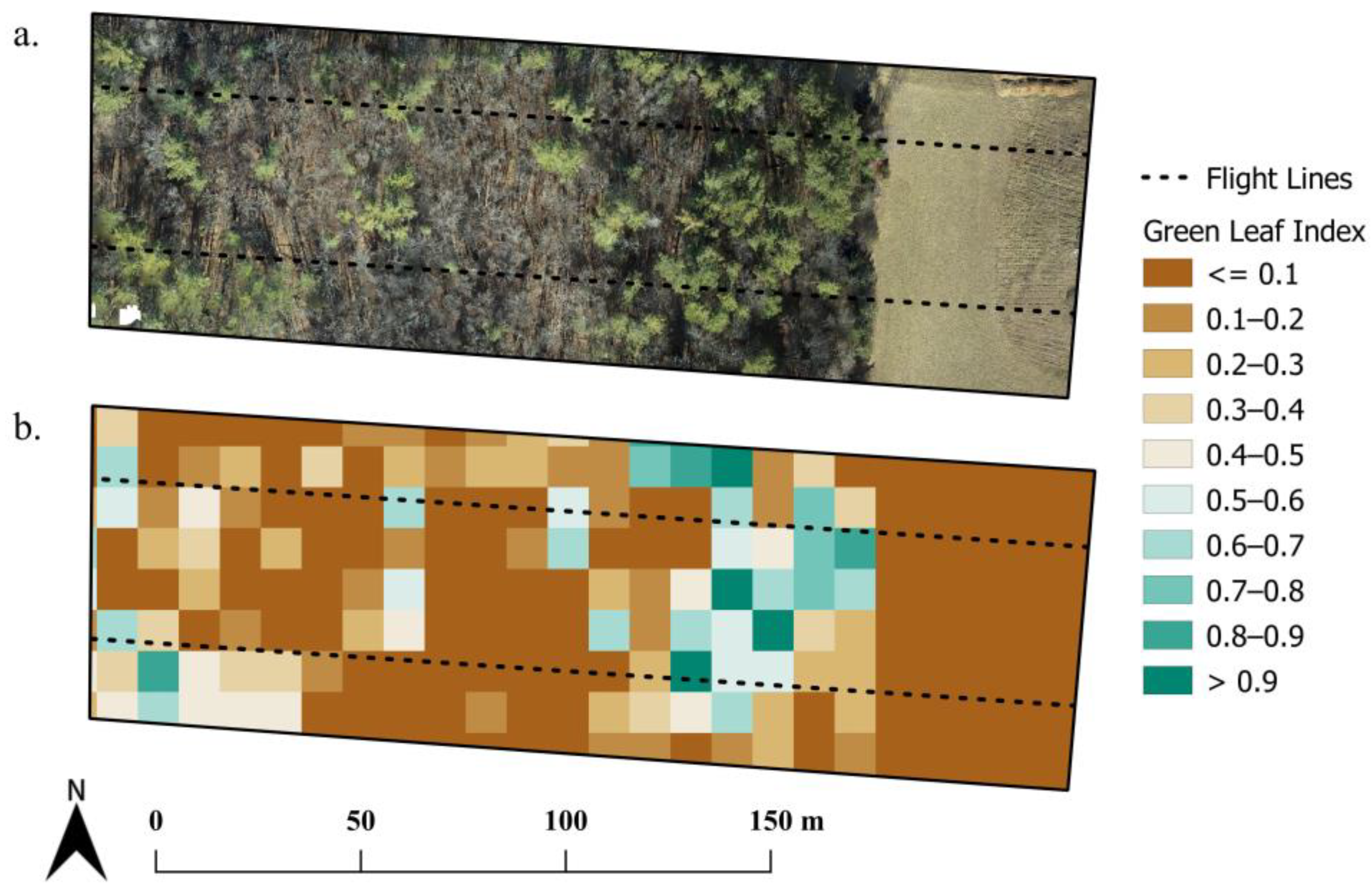
2.3. Vegetation Classification
2.4. Snow Depth Estimates and Bias Evaluation
3. Results
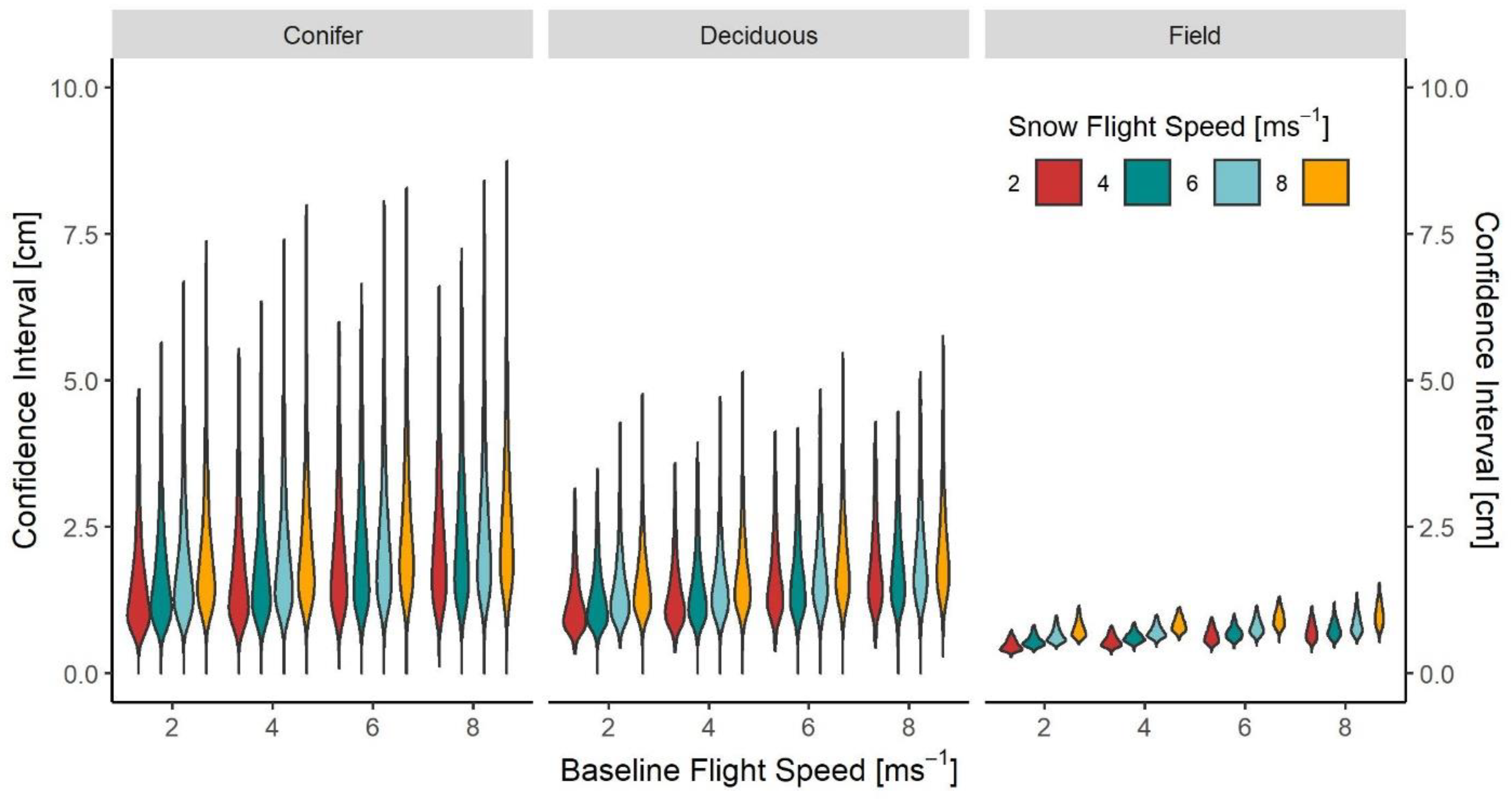
3.1. Lidar Snow Depth Estimate Precision
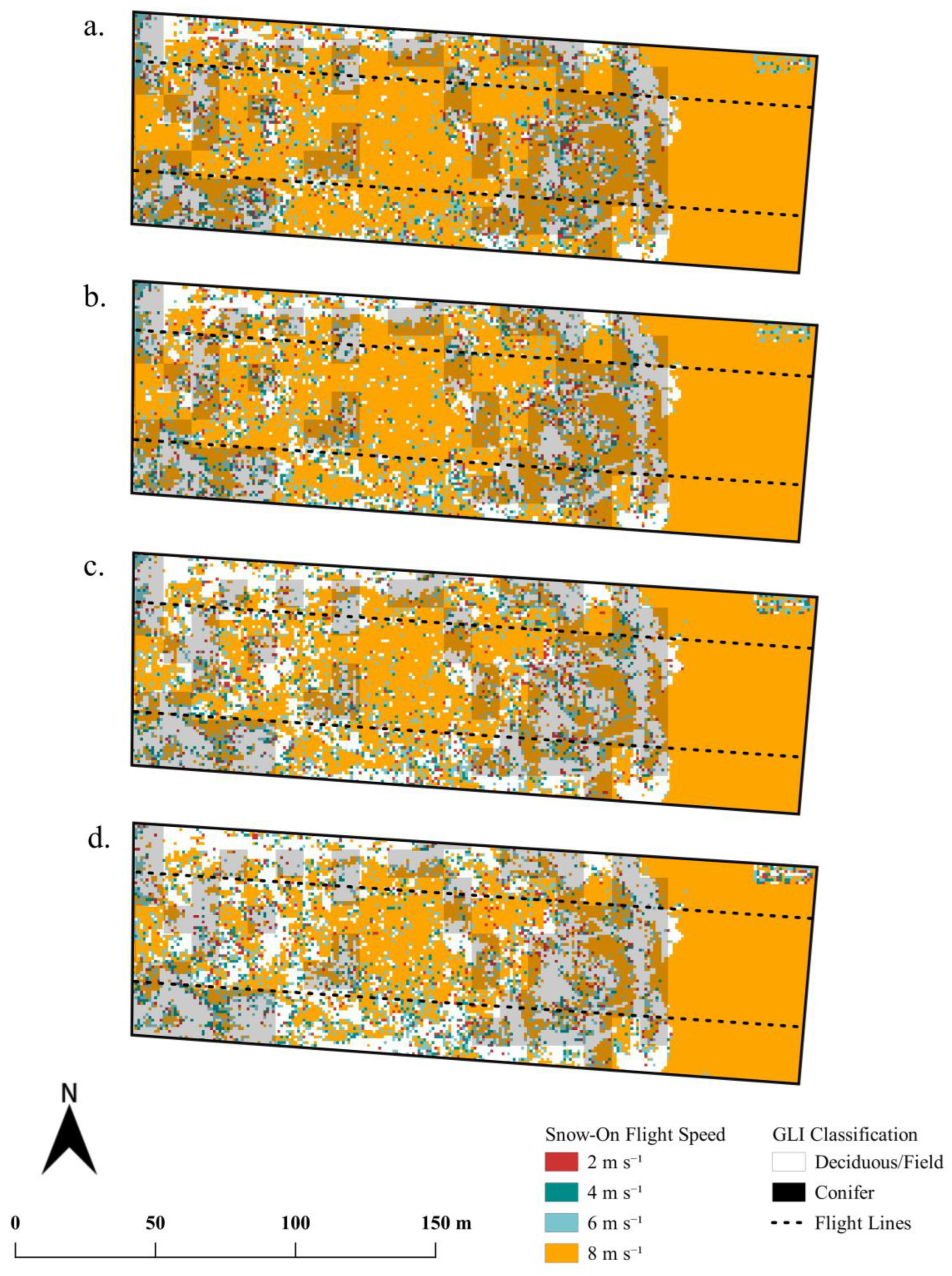
3.2. Flight Speeds to Achieve Precision Target
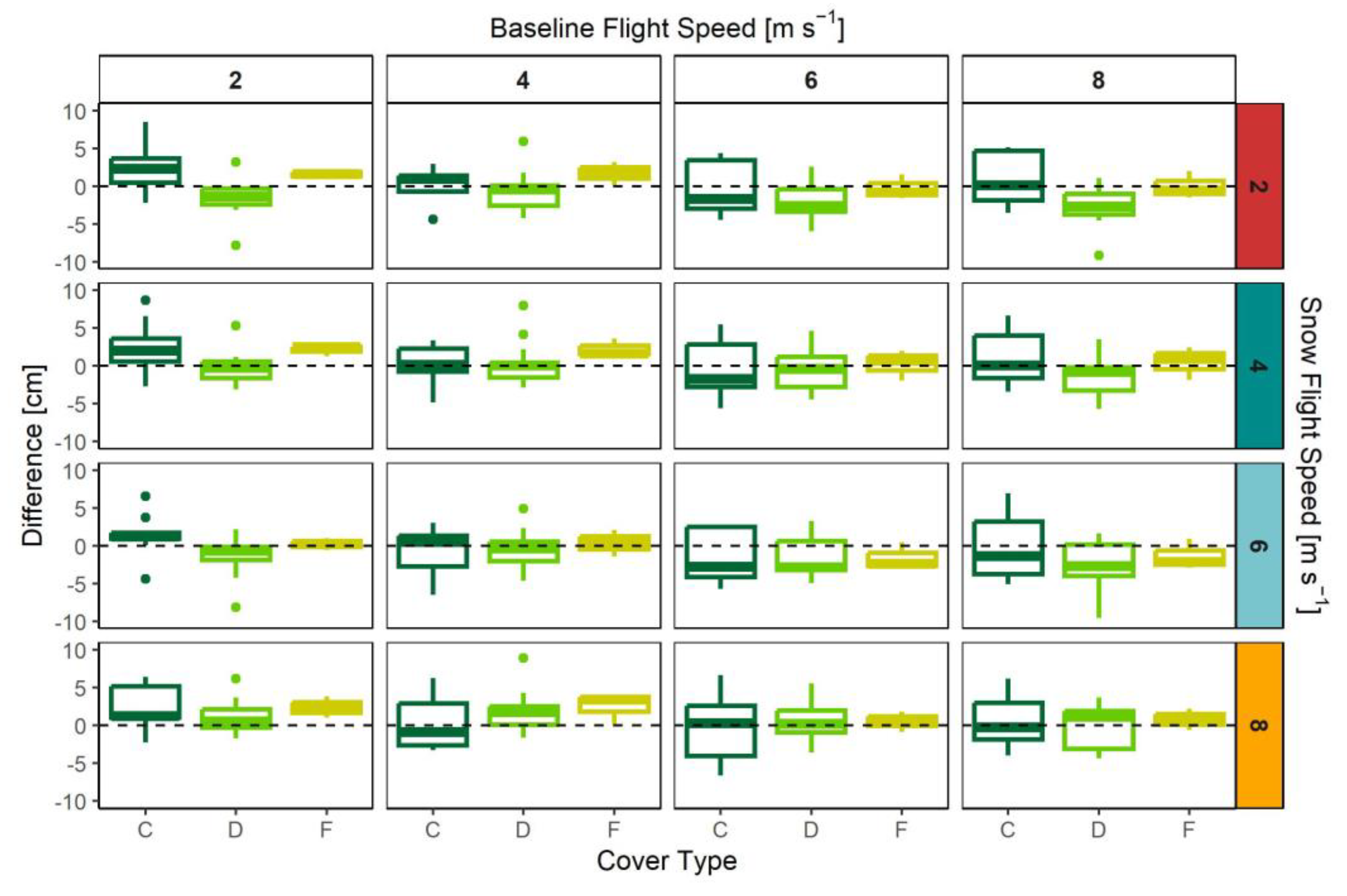
3.3. Lidar vs. In Situ Snow Depth Estimation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baseline | Snow-on | |||||||
|---|---|---|---|---|---|---|---|---|
| Flight Speed (m s−1) | 2 | 4 | 6 | 8 | 2 | 4 | 6 | 8 |
| Conifer | 129 | 88 | 55 | 41 | 350 | 178 | 117 | 88 |
| Deciduous | 197 | 133 | 85 | 63 | 542 | 272 | 184 | 138 |
| Field | 918 | 611 | 390 | 273 | 1194 | 592 | 402 | 304 |
| Percent Increase in Ground Returns | ||||
|---|---|---|---|---|
| Flight Speed (m s−1) | 2 | 4 | 6 | 8 |
| Conifer | 170% | 103% | 112% | 113% |
| Deciduous | 176% | 105% | 117% | 120% |
| Field | 30% | −3% | 3% | 11% |
References
- Johnston, J.M.; Cho, E.; Jacobs, J.M. A New Global Climatology of Ephemeral and Seasonal Snow. AGU Fall Meet. Abstr. 2022, 2022, C32B-01. [Google Scholar]
- Rutter, N.; Essery, R.; Pomeroy, J.; Altimir, N.; Andreadis, K.; Baker, I.; Barr, A.; Bartlett, P.; Boone, A.; Deng, H. Evaluation of Forest Snow Processes Models (SnowMIP2). J. Geophys. Res. Atmos. 2009, 114, D06111. [Google Scholar] [CrossRef]
- Dickerson-Lange, S.E.; Gersonde, R.F.; Hubbart, J.A.; Link, T.E.; Nolin, A.W.; Perry, G.H.; Roth, T.R.; Wayand, N.E.; Lundquist, J.D. Snow Disappearance Timing Is Dominated by Forest Effects on Snow Accumulation in Warm Winter Climates of the Pacific Northwest, United States. Hydrol. Process. 2017, 31, 1846–1862. [Google Scholar] [CrossRef]
- Helbig, N.; Moeser, D.; Teich, M.; Vincent, L.; Lejeune, Y.; Sicart, J.-E.; Monnet, J.-M. Snow Processes in Mountain Forests: Interception Modeling for Coarse-Scale Applications. Hydrol. Earth Syst. Sci. 2020, 24, 2545–2560. [Google Scholar] [CrossRef]
- Hotovy, O.; Jenicek, M. The Impact of Changing Subcanopy Radiation on Snowmelt in a Disturbed Coniferous Forest. Hydrol. Process. 2020, 34, 5298–5314. [Google Scholar] [CrossRef]
- Lundquist, J.D.; Dickerson-Lange, S.; Gutmann, E.; Jonas, T.; Lumbrazo, C.; Reynolds, D. Snow Interception Modelling: Isolated Observations Have Led to Many Land Surface Models Lacking Appropriate Temperature Sensitivities. Hydrol. Process. 2021, 35, e14274. [Google Scholar] [CrossRef]
- Clark, M.P.; Hendrikx, J.; Slater, A.G.; Kavetski, D.; Anderson, B.; Cullen, N.J.; Kerr, T.; Örn Hreinsson, E.; Woods, R.A. Representing Spatial Variability of Snow Water Equivalent in Hydrologic and Land-Surface Models: A Review. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Currier, W.R.; Lundquist, J.D. Snow Depth Variability at the Forest Edge in Multiple Climates in the Western United States. Water Resour. Res. 2018, 54, 8756–8773. [Google Scholar] [CrossRef]
- Currier, W.R.; Sun, N.; Wigmosta, M.; Cristea, N.; Lundquist, J.D. The Impact of Forest-controlled Snow Variability on Late-season Streamflow Varies by Climatic Region and Forest Structure. Hydrol. Process. 2022, 36, e14614. [Google Scholar] [CrossRef]
- Lundquist, J.D.; Dickerson-Lange, S.E.; Lutz, J.A.; Cristea, N.C. Lower Forest Density Enhances Snow Retention in Regions with Warmer Winters: A Global Framework Developed from Plot-Scale Observations and Modeling. Water Resour. Res. 2013, 49, 6356–6370. [Google Scholar] [CrossRef]
- Sanmiguel-Vallelado, A.; McPhee, J.; Carreño, P.E.O.; Moran-Tejeda, E.; Camarero, J.J.; López-Moreno, J.I. Sensitivity of Forest–Snow Interactions to Climate Forcing: Local Variability in a Pyrenean Valley. J. Hydrol. 2022, 605, 127311. [Google Scholar] [CrossRef]
- Sun, N.; Yan, H.; Wigmosta, M.S.; Lundquist, J.; Dickerson-Lange, S.; Zhou, T. Forest Canopy Density Effects on Snowpack across the Climate Gradients of the Western United States Mountain Ranges. Water Resour. Res. 2022, 58, e2020WR029194. [Google Scholar] [CrossRef]
- Broxton, P.; Harpold, A.; Biederman, J.; Troch, P.; Molotch, N.; Brooks, P. Quantifying the Effects of Vegetation Structure on Snow Accumulation and Ablation in Mixed-conifer Forests. Ecohydrology 2015, 8, 1073–1094. [Google Scholar] [CrossRef]
- Krogh, S.A.; Broxton, P.D.; Manley, P.N.; Harpold, A.A. Using Process Based Snow Modeling and Lidar to Predict the Effects of Forest Thinning on the Northern Sierra Nevada Snowpack. Front. For. Glob. Chang. 2020, 3, 21. [Google Scholar] [CrossRef]
- Mazzotti, G.; Essery, R.; Moeser, C.D.; Jonas, T. Resolving Small-Scale Forest Snow Patterns Using an Energy Balance Snow Model With a One-Layer Canopy. Water Resour. Res. 2020, 56, e2019WR026129. [Google Scholar] [CrossRef]
- Musselman, K.N.; Molotch, N.P.; Margulis, S.A.; Kirchner, P.B.; Bales, R.C. Influence of Canopy Structure and Direct Beam Solar Irradiance on Snowmelt Rates in a Mixed Conifer Forest. Agric. For. Meteorol. 2012, 161, 46–56. [Google Scholar] [CrossRef]
- Zhou, G.; Cui, M.; Wan, J.; Zhang, S. A Review on Snowmelt Models: Progress and Prospect. Sustainability 2021, 13, 11485. [Google Scholar] [CrossRef]
- Mazzotti, G.; Currier, W.R.; Deems, J.S.; Pflug, J.M.; Lundquist, J.D.; Jonas, T. Revisiting Snow Cover Variability and Canopy Structure within Forest Stands: Insights from Airborne Lidar Data. Water Resour. Res. 2019, 55, 6198–6216. [Google Scholar] [CrossRef]
- Cho, E.; Hunsaker, A.G.; Jacobs, J.M.; Palace, M.; Sullivan, F.B.; Burakowski, E.A. Maximum Entropy Modeling to Identify Physical Drivers of Shallow Snowpack Heterogeneity Using Unpiloted Aerial System (UAS) Lidar. J. Hydrol. 2021, 602, 126722. [Google Scholar] [CrossRef]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar Measurement of Snow Depth: A Review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef]
- Harpold, A.A.; Guo, Q.; Molotch, N.; Brooks, P.D.; Bales, R.; Fernandez-Diaz, J.C.; Musselman, K.N.; Swetnam, T.L.; Kirchner, P.; Meadows, M.W.; et al. LiDAR-Derived Snowpack Data Sets from Mixed Conifer Forests across the Western United States. Water Resour. Res. 2014, 50, 2749–2755. [Google Scholar] [CrossRef]
- Kirchner, P.B.; Bales, R.C.; Molotch, N.P.; Flanagan, J.; Guo, Q. LiDAR Measurement of Seasonal Snow Accumulation along an Elevation Gradient in the Southern Sierra Nevada, California. Hydrol. Earth Syst. Sci. 2014, 18, 4261–4275. [Google Scholar] [CrossRef]
- Kostadinov, T.S.; Schumer, R.; Hausner, M.; Bormann, K.J.; Gaffney, R.; McGwire, K.; Painter, T.H.; Tyler, S.; Harpold, A.A. Watershed-Scale Mapping of Fractional Snow Cover under Conifer Forest Canopy Using Lidar. Remote Sens. Environ. 2019, 222, 34–49. [Google Scholar] [CrossRef]
- Currier, W.R.; Pflug, J.; Mazzotti, G.; Jonas, T.; Deems, J.S.; Bormann, K.J.; Painter, T.H.; Hiemstra, C.A.; Gelvin, A.; Uhlmann, Z.; et al. Comparing Aerial Lidar Observations with Terrestrial Lidar and Snow-Probe Transects From NASA’s 2017 SnowEx Campaign. Water Resour. Res. 2019, 55, 6285–6294. [Google Scholar] [CrossRef]
- Harder, P.; Schirmer, M.; Pomeroy, J.; Helgason, W. Accuracy of Snow Depth Estimation in Mountain and Prairie Environments by an Unmanned Aerial Vehicle. Cryosphere 2016, 10, 2559–2571. [Google Scholar] [CrossRef]
- Jacobs, J.M.; Hunsaker, A.G.; Sullivan, F.B.; Palace, M.; Burakowski, E.A.; Herrick, C.; Cho, E. Snow Depth Mapping with Unpiloted Aerial System Lidar Observations: A Case Study in Durham, New Hampshire, United States. Cryosphere 2021, 15, 1485–1500. [Google Scholar] [CrossRef]
- Dharmadasa, V.; Kinnard, C.; Baraër, M. An Accuracy Assessment of Snow Depth Measurements in Agro-Forested Environments by UAV Lidar. Remote Sens. 2022, 14, 1649. [Google Scholar] [CrossRef]
- Koutantou, K.; Mazzotti, G.; Brunner, P.; Webster, C.; Jonas, T. Exploring Snow Distribution Dynamics in Steep Forested Slopes with UAV-Borne LiDAR. Cold Reg. Sci. Technol. 2022, 200, 103587. [Google Scholar] [CrossRef]
- Harder, P.; Pomeroy, J.W.; Helgason, W.D. Improving Sub-Canopy Snow Depth Mapping with Unmanned Aerial Vehicles: Lidar versus Structure-from-Motion Techniques. Cryosphere 2020, 14, 1919–1935. [Google Scholar] [CrossRef]
- Zheng, Z.; Kirchner, P.B.; Bales, R.C. Topographic and Vegetation Effects on Snow Accumulation in the Southern Sierra Nevada: A Statistical Summary from Lidar Data. Cryosphere 2016, 10, 257–269. [Google Scholar] [CrossRef]
- Feng, T.; Hao, X.; Wang, J.; Luo, S.; Huang, G.; Li, H.; Zhao, Q. Applicability of Alpine Snow Depth Estimation Based on Multitemporal UAV-LiDAR Data: A Case Study in the Maxian Mountains, Northwest China. J. Hydrol. 2023, 617, 129006. [Google Scholar] [CrossRef]
- Liu, Q.; Fu, L.; Wang, G.; Li, S.; Li, Z.; Chen, E.; Pang, Y.; Hu, K. Improving Estimation of Forest Canopy Cover by Introducing Loss Ratio of Laser Pulses Using Airborne LiDAR. IEEE Trans. Geosci. Remote Sens. 2020, 58, 567–585. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.-C.; Whitman, D.; Shyu, M.-L.; Yan, J.; Zhang, C. A Progressive Morphological Filter for Removing Nonground Measurements from Airborne LIDAR Data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Proulx, H.; Jacobs, J.M.; Burakowski, E.A.; Cho, E.; Hunsaker, A.G.; Sullivan, F.B.; Palace, M.; Wagner, C. Brief Communication: Comparison of in Situ Ephemeral Snow Depth Measurements over a Mixed-Use Temperate Forest Landscape. Cryosphere 2023, 17, 3435–3442. [Google Scholar] [CrossRef]
- Helsel, D.R.; Hirsch, R.M. Statistical Methods in Water Resources. In Techniques of Water-Resources Investigations of the United States Geological Survey Book 4, Hydrologic Analysis and Interpretation; US Geological Survey: Reston, VA, USA, 2002. [Google Scholar]
- Marshall, S.; Oglesby, R.J. An Improved Snow Hydrology for GCMs. Part 1: Snow Cover Fraction, Albedo, Grain Size, and Age. Clim. Dyn. 1994, 10, 21–37. [Google Scholar] [CrossRef]
- Singh, S.K.; Kulkarni, A.V.; Chaudhary, B.S. Hyperspectral Analysis of Snow Reflectance to Understand the Effects of Contamination and Grain Size. Ann. Glaciol. 2010, 51, 83–88. [Google Scholar] [CrossRef]
- Seidel, F.C.; Rittger, K.; Skiles, S.M.; Molotch, N.P.; Painter, T.H. Case Study of Spatial and Temporal Variability of Snow Cover, Grain Size, Albedo and Radiative Forcing in the Sierra Nevada and Rocky Mountain Snowpack Derived from Imaging Spectroscopy. Cryosphere 2016, 10, 1229–1244. [Google Scholar] [CrossRef]
- Skiles, S.M.; Donahue, C.P.; Hunsaker, A.G.; Jacobs, J.M. UAV Hyperspectral Imaging for Multiscale Assessment of Landsat 9 Snow Grain Size and Albedo. Front. Remote Sens. 2023, 3, 1038287. [Google Scholar] [CrossRef]
- Warren, S.G. Optical Properties of Snow. Rev. Geophys. 1982, 20, 67–89. [Google Scholar] [CrossRef]
- Adolph, A.C.; Albert, M.R.; Lazarcik, J.; Dibb, J.E.; Amante, J.M.; Price, A. Dominance of Grain Size Impacts on Seasonal Snow Albedo at Open Sites in New Hampshire. J. Geophys. Res. Atmos. 2017, 122, 121–139. [Google Scholar] [CrossRef]
- Curcio, J.A.; Petty, C.C. The Near Infrared Absorption Spectrum of Liquid Water. JOSA 1951, 41, 302–304. [Google Scholar] [CrossRef]
- Varade, D.; Dikshit, O. Potential of Multispectral Reflectance for Assessment of Snow Geophysical Parameters in Solang Valley in the Lower Indian Himalayas. GISci. Remote Sens. 2020, 57, 107–126. [Google Scholar] [CrossRef]

| Baseline Flight Speed (m s−1) | ||||||
|---|---|---|---|---|---|---|
| 2 | 4 | 6 | 8 | |||
| Snow-on flight speed (m s−1) | 2 | 2.87 | 3.42 | 3.96 | 4.32 | Conifer |
| 4 | 3.45 | 3.99 | 4.56 | 4.92 | ||
| 6 | 3.74 | 4.18 | 5.21 | 5.22 | ||
| 8 | 4.04 | 4.58 | 5.26 | 5.42 | ||
| 2 | 2.04 | 2.20 | 2.66 | 2.96 | Deciduous | |
| 4 | 2.38 | 2.56 | 3.03 | 3.27 | ||
| 6 | 2.83 | 2.73 | 3.14 | 3.53 | ||
| 8 | 2.89 | 2.94 | 3.37 | 3.74 | ||
| 2 | 0.51 | 0.59 | 0.69 | 0.79 | Field | |
| 4 | 0.60 | 0.67 | 0.75 | 0.81 | ||
| 6 | 0.70 | 0.77 | 0.86 | 0.91 | ||
| 8 | 0.82 | 0.91 | 1.01 | 1.08 | ||
| Baseline Flight Speed (m s−1) | |||||||
|---|---|---|---|---|---|---|---|
| 2 | 4 | 6 | 8 | ||||
| a. <2 cm Precision | Snow-on flight speed (m s−1) | 2 | 0.706 | 0.645 | 0.536 | 0.470 | Conifer |
| 4 | 0.658 | 0.602 | 0.495 | 0.434 | |||
| 6 | 0.600 | 0.541 | 0.442 | 0.381 | |||
| 8 | 0.494 | 0.435 | 0.334 | 0.282 | |||
| 2 | 0.851 | 0.802 | 0.709 | 0.631 | Deciduous | ||
| 4 | 0.820 | 0.771 | 0.675 | 0.597 | |||
| 6 | 0.780 | 0.727 | 0.623 | 0.538 | |||
| 8 | 0.708 | 0.644 | 0.531 | 0.443 | |||
| 2 | 0.987 | 0.984 | 0.982 | 0.975 | Field | ||
| 4 | 0.985 | 0.984 | 0.977 | 0.969 | |||
| 6 | 0.982 | 0.980 | 0.971 | 0.962 | |||
| 8 | 0.970 | 0.969 | 0.961 | 0.954 | |||
| b. >2 cm Precision | 2 | 0.272 | 0.331 | 0.430 | 0.488 | Conifer | |
| 4 | 0.320 | 0.374 | 0.470 | 0.525 | |||
| 6 | 0.377 | 0.432 | 0.522 | 0.575 | |||
| 8 | 0.479 | 0.535 | 0.626 | 0.672 | |||
| 2 | 0.141 | 0.188 | 0.277 | 0.350 | Deciduous | ||
| 4 | 0.172 | 0.218 | 0.311 | 0.383 | |||
| 6 | 0.211 | 0.262 | 0.361 | 0.441 | |||
| 8 | 0.284 | 0.346 | 0.455 | 0.538 | |||
| 2 | 0.013 | 0.015 | 0.018 | 0.025 | Field | ||
| 4 | 0.014 | 0.016 | 0.022 | 0.030 | |||
| 6 | 0.017 | 0.020 | 0.028 | 0.037 | |||
| 8 | 0.029 | 0.030 | 0.038 | 0.045 | |||
| c. No Snow Depth Estimate | 2 | 0.022 | 0.024 | 0.035 | 0.042 | Conifer | |
| 4 | 0.022 | 0.024 | 0.034 | 0.041 | |||
| 6 | 0.023 | 0.026 | 0.036 | 0.044 | |||
| 8 | 0.026 | 0.030 | 0.039 | 0.046 | |||
| 2 | 0.008 | 0.010 | 0.014 | 0.020 | Deciduous | ||
| 4 | 0.008 | 0.011 | 0.014 | 0.020 | |||
| 6 | 0.009 | 0.011 | 0.015 | 0.020 | |||
| 8 | 0.008 | 0.010 | 0.014 | 0.020 | |||
| 2 | 0.001 | 0.000 | 0.000 | 0.001 | Field | ||
| 4 | 0.001 | 0.001 | 0.001 | 0.001 | |||
| 6 | 0.001 | 0.001 | 0.001 | 0.001 | |||
| 8 | 0.001 | 0.001 | 0.001 | 0.001 | |||
| Baseline Flight Speed (m s−1) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| a. Mean Difference | b. RMSD | |||||||||
| 2 | 4 | 6 | 8 | 2 | 4 | 6 | 8 | |||
| Snow-on flight speed (m s−1) | 2 | 2.43 | 0.33 | −0.16 | 0.78 | 3.78 | 2.12 | 3.33 | 3.33 | Conifer |
| 4 | 2.35 | 0.26 | −0.23 | 0.71 | 4.12 | 2.36 | 3.66 | 3.46 | ||
| 6 | 1.32 | −0.77 | −1.27 | −0.32 | 3.05 | 3.01 | 3.48 | 3.87 | ||
| 8 | 2.37 | 0.28 | −0.21 | 0.73 | 3.78 | 3.33 | 4.27 | 3.14 | ||
| 2 | −1.48 | −0.78 | −1.97 | −2.75 | 2.79 | 2.77 | 3.03 | 3.65 | Deciduous | |
| 4 | −0.22 | 0.48 | −0.71 | −1.48 | 2.00 | 2.91 | 2.61 | 2.77 | ||
| 6 | −1.28 | −0.59 | −1.78 | −2.55 | 2.89 | 2.52 | 3.07 | 4.09 | ||
| 8 | 1.10 | 1.79 | 0.60 | −0.17 | 2.37 | 3.14 | 2.74 | 2.63 | ||
| 2 | 1.58 | 1.72 | −0.29 | −0.04 | 1.64 | 2.12 | 1.37 | 1.50 | Field | |
| 4 | 2.12 | 2.26 | 0.25 | 0.50 | 2.20 | 2.46 | 1.63 | 1.84 | ||
| 6 | 0.20 | 0.34 | −1.67 | −1.42 | 0.65 | 1.47 | 2.23 | 2.17 | ||
| 8 | 2.39 | 2.53 | 0.52 | 0.77 | 2.65 | 3.05 | 1.18 | 1.39 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sullivan, F.B.; Hunsaker, A.G.; Palace, M.W.; Jacobs, J.M. Evaluating the Effects of UAS Flight Speed on Lidar Snow Depth Estimation in a Heterogeneous Landscape. Remote Sens. 2023, 15, 5091. https://doi.org/10.3390/rs15215091
Sullivan FB, Hunsaker AG, Palace MW, Jacobs JM. Evaluating the Effects of UAS Flight Speed on Lidar Snow Depth Estimation in a Heterogeneous Landscape. Remote Sensing. 2023; 15(21):5091. https://doi.org/10.3390/rs15215091
Chicago/Turabian StyleSullivan, Franklin B., Adam G. Hunsaker, Michael W. Palace, and Jennifer M. Jacobs. 2023. "Evaluating the Effects of UAS Flight Speed on Lidar Snow Depth Estimation in a Heterogeneous Landscape" Remote Sensing 15, no. 21: 5091. https://doi.org/10.3390/rs15215091
APA StyleSullivan, F. B., Hunsaker, A. G., Palace, M. W., & Jacobs, J. M. (2023). Evaluating the Effects of UAS Flight Speed on Lidar Snow Depth Estimation in a Heterogeneous Landscape. Remote Sensing, 15(21), 5091. https://doi.org/10.3390/rs15215091