

Predicting C/N0 as a Key Parameter for Network RTK Integrity Prediction in Urban Environments

Abstract
:1. Introduction
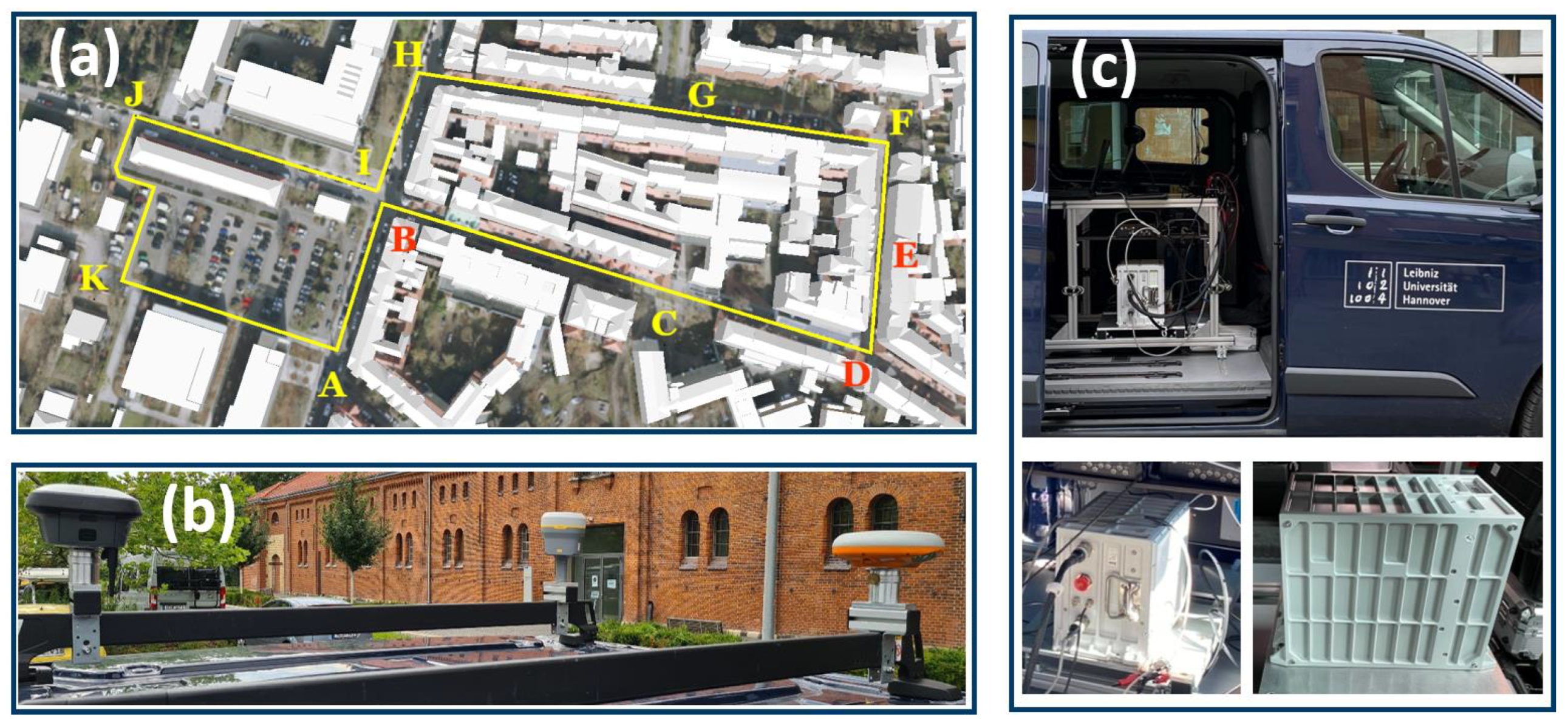
2. Experiment
3. Analysis of the Positioning Solution and Observation Data Quality
3.1. Solution Type
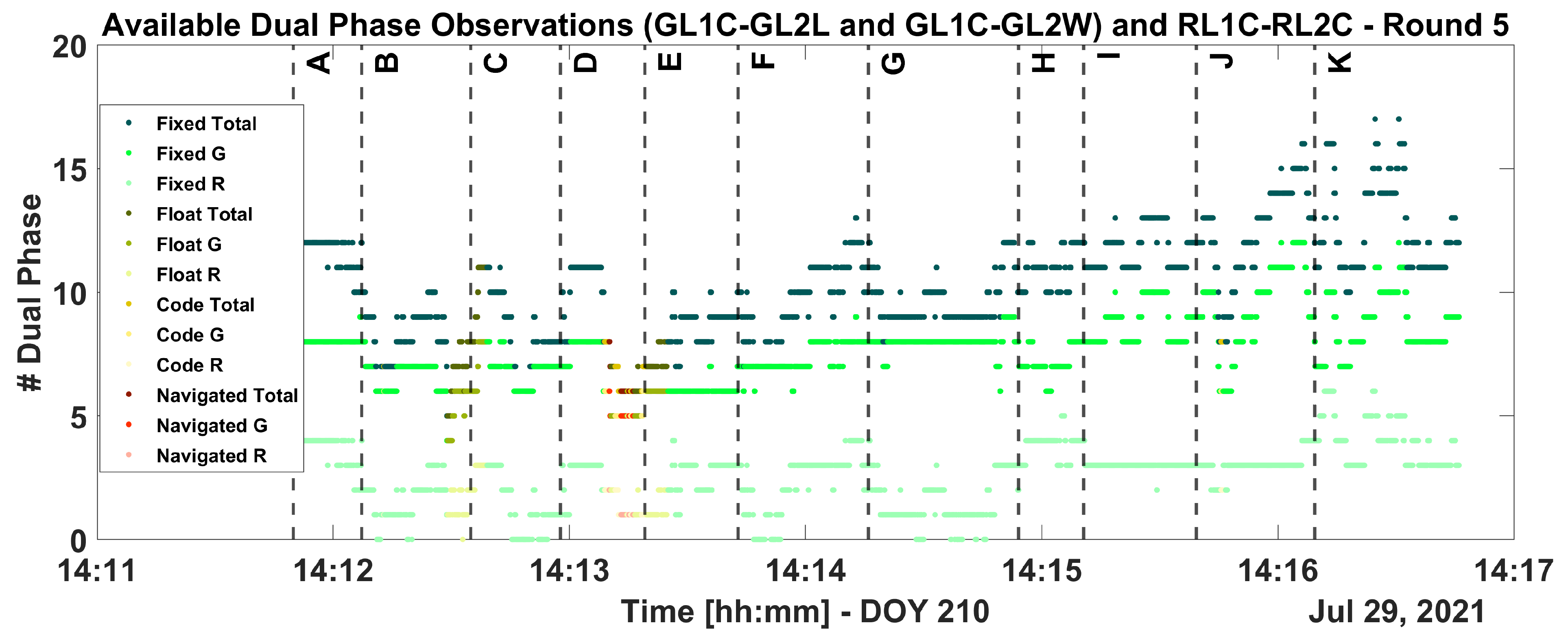
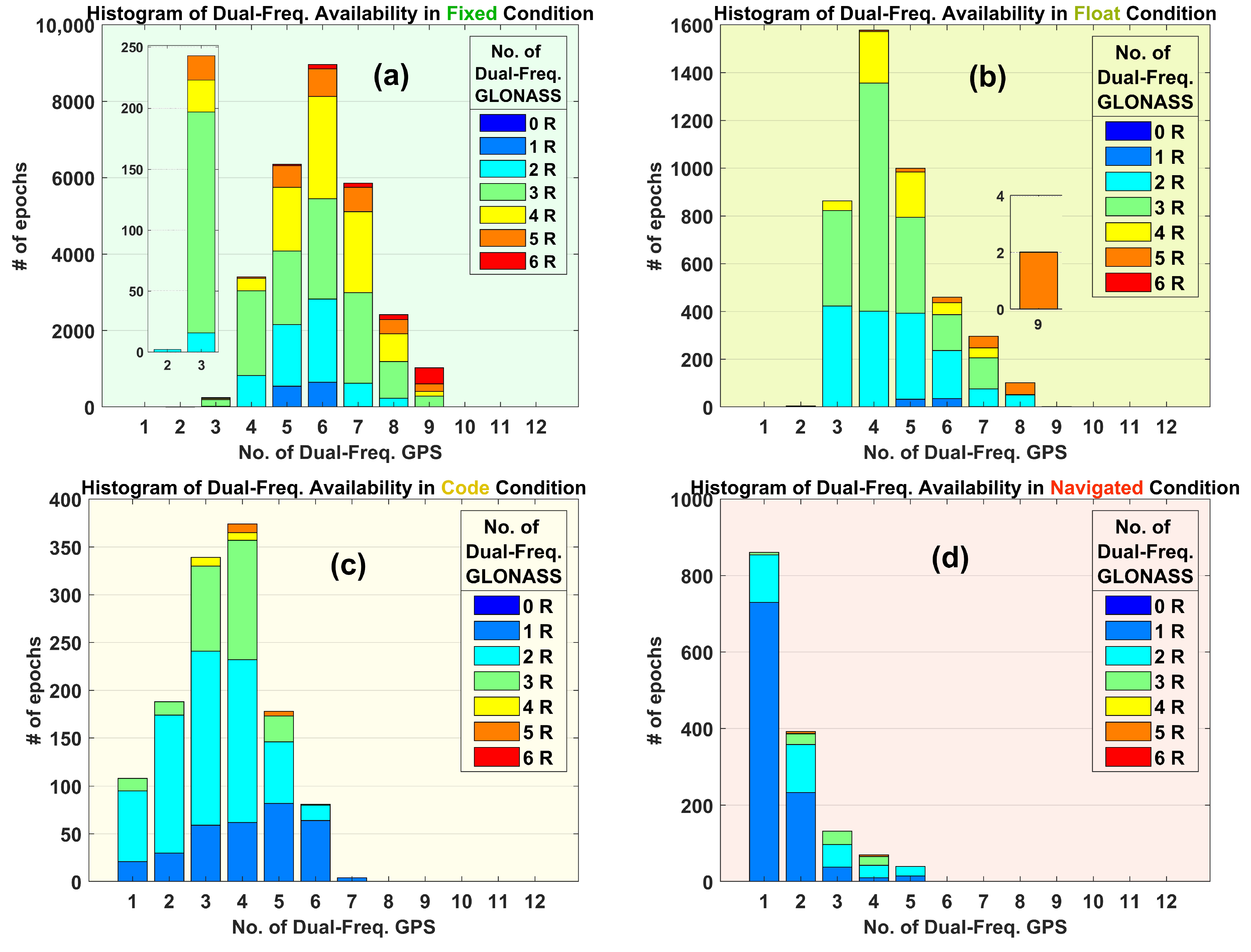
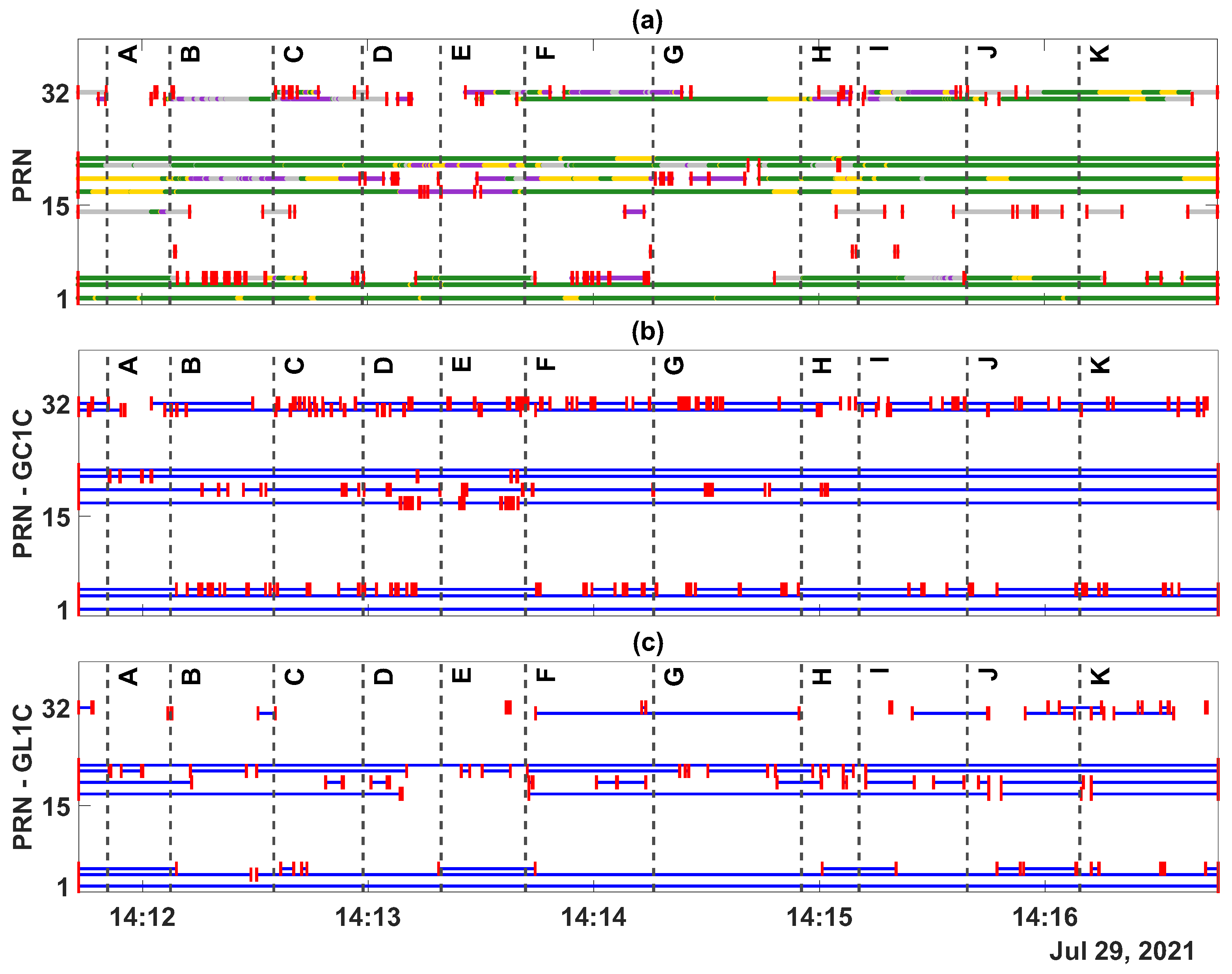
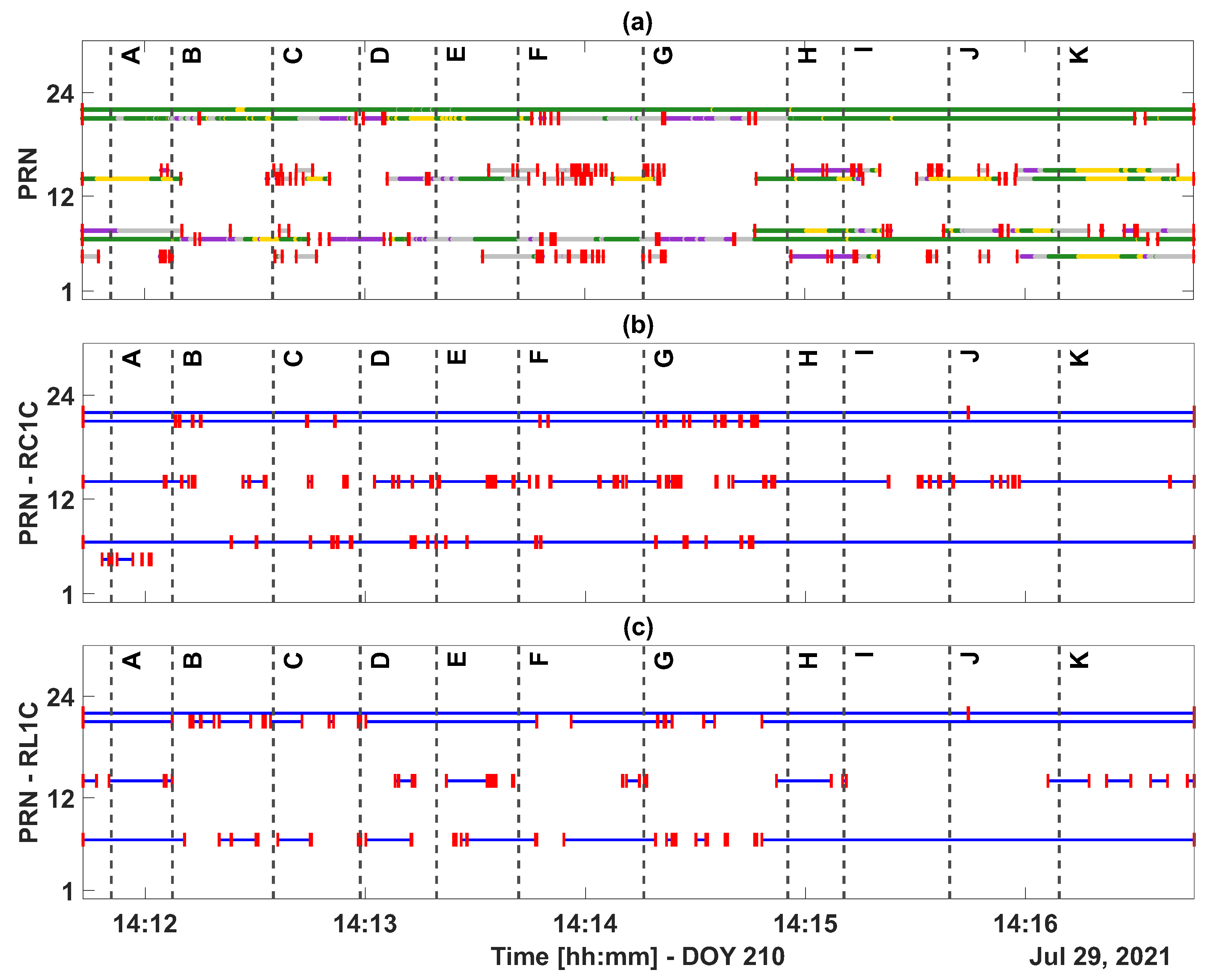
3.2. Number of Available Dual-Frequency Signals
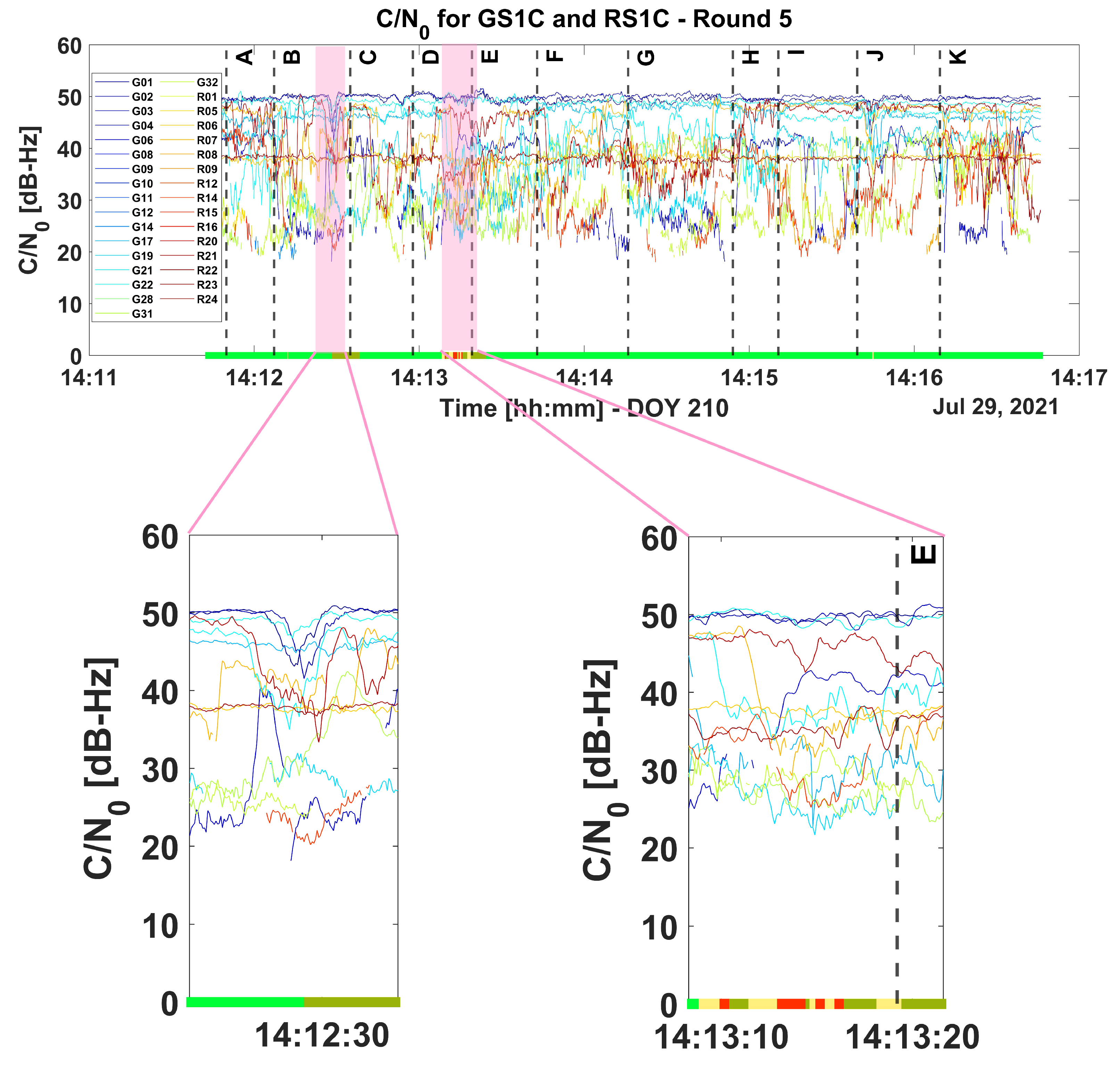
3.3. Signal Strength
4. Predicting Signal Strength
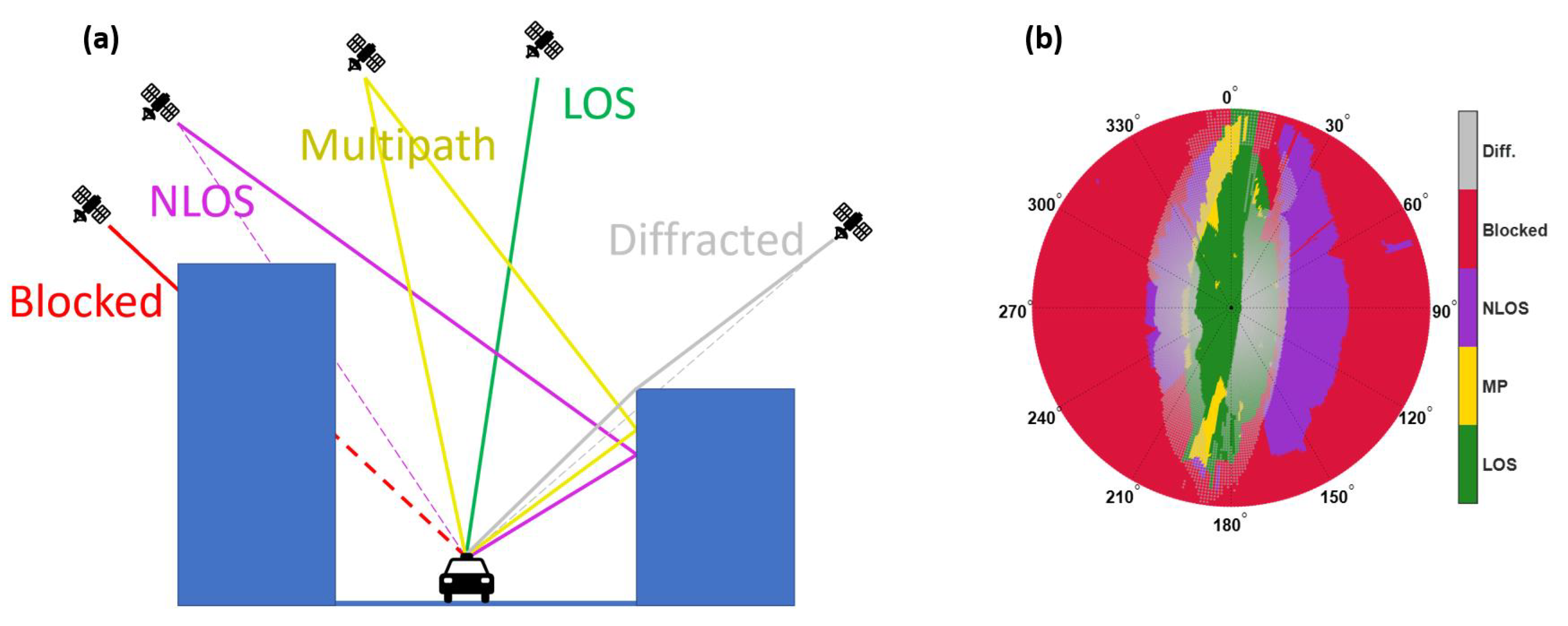
4.1. Classification of the Signal Reception Conditions by Ray-Tracing
4.2. Predicting Satellite Visibility
4.3. Signal Power in Line-Of-Sight Conditions
4.4. Signal Power in Non-Line-Of-Sight and Multipath
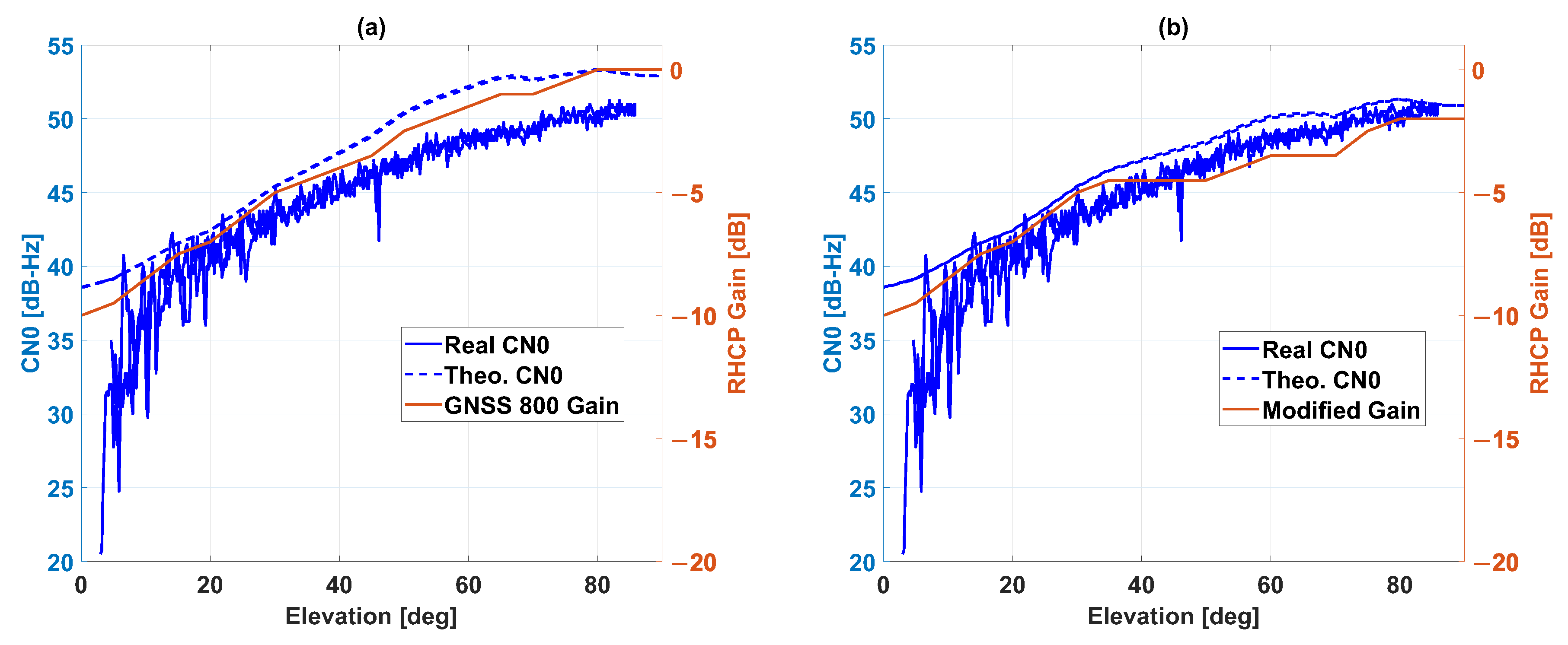
4.5. The Role of Antenna Gain Patterns
- Satellite
- Receiver
4.6. Carrier-to-Noise Density Ratio
4.7. Diffraction
4.8. Foliage
5. Prediction Results
5.1. C/N0 Prediction
5.2. Predicted Measured Difference
5.3. Adjusting the Visibility Based on Prediction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International, S. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE Int. 2018, 4970, 1–5. [Google Scholar]
- Pendleton, S.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.; Rus, D.; Ang, M., Jr. Perception, planning, control, and coordination for autonomous vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science & Business Media: Wien, Austria, 2007. [Google Scholar]
- Teunissen, P.J.; Montenbruck, O. (Eds.) Springer Handbook of Global Navigation Satellite Systems; Volume 10, Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Hobiger, T.; Jakowski, N. Atmospheric signal propagation. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 165–193. [Google Scholar]
- Wells, D.; Beck, N.; Delikaraoglou, D.; Kleusberg, A.; Krakiwsky, E.J.; Lachapelle, G.; Langley, R.B.; Nakiboglu, M.; Schwarz, K.P.; Tranquilla, J.M. Guide to GPS Positioning; Canadian GPS Associates: Fredericton, NB, Canada, 1986. [Google Scholar]
- Odijk, D.; Wanninger, L. Differential positioning. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 753–780. [Google Scholar]
- Wübbena, G.; Bagge, A.; Schmitz, M. Network-based techniques for RTK applications. In GPS Symposium, GPS Society; Japan Institute of Navigation: Tokyo, Japan, 2001; pp. 14–16. [Google Scholar]
- Braasch, M. Multipath. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 443–468. [Google Scholar]
- Bressler, J.; Reisdorf, P.; Obst, M.; Wanielik, G. GNSS positioning in non-line-of-sight context—A survey. In Proceedings of the 2016 IEEE 19th International Conference On Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1147–1154. [Google Scholar]
- Schön, S.; Baasch, K.; Icking, L.; KarimiDoona, A.; Lin, Q.; Ruwisch, F.; Schaper, A.; Su, J. Towards Integrity for GNSS-based urban navigation–challenges and lessons learned. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 1774–1781. [Google Scholar]
- Groves, P. It’s time for 3D mapping–aided GNSS. Inside Gnss Mag 2016, 11, 50–56. [Google Scholar]
- Bradbury, J. Prediction of urban GNSS availability and signal degradation using virtual reality city models. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 2696–2706. [Google Scholar]
- Bradbury, J.; Ziebart, M.; Cross, P.; Boulton, P.; Read, A. Code multipath modelling in the urban environment using large virtual reality city models: Determining the local environment. J. Navig. 2007, 60, 95–105. [Google Scholar] [CrossRef]
- Chapuis, T.; Bonhoure, B.; Rougerie, S.; Lacoste, F.; Grelier, T.; Lapeyre, D.; Noirat, P. SPRING: A Powerful 3D GNSS Simulator for Constraint Environment. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 454–465. [Google Scholar]
- Ait-Ighil, M. Enhanced Physical Statistical Simulator of the Land Mobile Satellite Channel for Multipath Modelling Applied to Satellite Navigation Systems. Ph.D. Thesis, The Institut Supérieur de l’Aéronautique et de l’Espace (ISAE), Toulouse, France, 2013. [Google Scholar]
- Peyraud, S.; Bétaille, D.; Renault, S.; Ortiz, M.; Mougel, F.; Meizel, D.; Peyret, F. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm. Sensors 2013, 13, 829–847. [Google Scholar] [CrossRef] [PubMed]
- Marais, J.; Berbineau, M.; Heddebaut, M. Land mobile GNSS availability and multipath evaluation tool. IEEE Trans. Veh. Technol. 2005, 54, 1697–1704. [Google Scholar] [CrossRef]
- Betaille, D.; Miquel, S.; Godan, F.; Peyret, F. 3D-city-model-aided GNSS accurate positioning with integrity provision using simplified geometry of buildings. In Proceedings of the European Navigation Conference, Bordeaux, France, 8–10 April 2015; 6p. [Google Scholar]
- Zhu, N.; Betaille, D.; Marais, J.; Berbineau, M. GNSS integrity monitoring schemes for terrestrial applications in harsh signal environments. IEEE Intell. Transp. Syst. Mag. 2020, 12, 81–91. [Google Scholar] [CrossRef]
- Xin, S.; Geng, J.; Zhang, G.; Ng, H.; Guo, J.; Hsu, L. 3D-mapping-aided PPP-RTK aiming at deep urban canyons. J. Geod. 2022, 96, 78. [Google Scholar] [CrossRef]
- Hsu, L.; Gu, Y.; Kamijo, S. 3D building model-based pedestrian positioning method using GPS/GLONASS/QZSS and its reliability calculation. Gps Solut. 2016, 20, 413–428. [Google Scholar] [CrossRef]
- Zhang, G.; Ng, H.; Wen, W.; Hsu, L. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6175–6187. [Google Scholar] [CrossRef]
- Ho, H.; Ng, H.; Leung, Y.; Wen, W.; Hsu, L.; Luo, Y. Smartphone level indoor/outdoor ubiquitous pedestrian positioning 3DMA GNSS/VINS integration using FGO. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, 48, 175–182. [Google Scholar] [CrossRef]
- Spirent Sim3D. 2023. Available online: https://www.spirent.com/products/multipath-and-obscuration-simulation-sim3d (accessed on 30 July 2023).
- Smyrnaios, M. Carrier-Phase Multipath in Satellite-Based Positioning; Leibniz Universität Hannover: Hannover, Germany, 2016. [Google Scholar]
- Icking, L.; Ruwisch, F.; Schön, S. Multipath Characterization Using Ray-Tracing in Urban Trenches. In Geodesy for a Sustainable Earth, International Association of Geodesy Symposia; Freymueller, J.T., Sánchez, L., Eds.; Springer: Cham, Switzerland, 2022; Volume 154. [Google Scholar]
- Ruwisch, F.; Schön, S. Performance Assessment of GNSS RTK Positioning in Urban Environments: Outlier Detection versus 3DMA-FDE. In Proceedings of the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 2649–2663. [Google Scholar]
- Furukawa, R.; Kubo, N.; El-Mowafy, A. Prediction of RTK-GNSS performance in urban environments using a 3D model and continuous LoS method. In Proceedings of the 2020 International Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 21–24 January 2020; pp. 763–771. [Google Scholar]
- Karimidoona, A.; Schön, S.; Icking, L.; Ruwisch, F. On the prediction of network RTK integrity performance in urban environments. In Proceedings of the 2022 10th ESA NAVITEC, Noordwijk, The Netherlands, 5–7 April 2022. [Google Scholar]
- McGraw, G.; Groves, P.; Ashman, B. Robust positioning in the presence of multipath and NLOS GNSS signals. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; Wiley: Hoboken, NJ, USA, 2020; Volume 1, pp. 551–589. [Google Scholar]
- Karimidoona, A.; Schön, S. Integrity monitoring of commercial RTK receivers in static open sky and kinematic urban environments scenarios. In Proceedings of the 2022 International Technical Meeting of the Institute of Navigation, Long Beach, CA, USA, 25–27 January 2022; pp. 819–834. [Google Scholar]
- Weber, G.; Dettmering, D.; Gebhard, H.; Kalafus, R. Networked transport of RTCM via internet protocol (Ntrip)... IP-Streaming for Real-Time GNSS Applications. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 2243–2247. [Google Scholar]
- Riecken, J.; Kurtenbach, E. Der Satellitenpositionierungsdienst der deutschen Landesvermessung–SAPOS®. In ZfV-Zeitschrift Für Geodäsie, Geoinformation und Landmanagement; 142/5; ZFV: Augsburg, Germany, 2017; pp. 293–300. [Google Scholar]
- Teunissen, P. Carrier phase integer ambiguity resolution. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 661–685. [Google Scholar]
- Odijk, D. Positioning model. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 605–638. [Google Scholar]
- Verhagen, S.; Teunissen, P.; Odijk, D. The future of single-frequency integer ambiguity resolution. In VII Hotine-Marussi Symposium On Mathematical Geodesy: Proceedings of the Symposium in Rome, 6–10 June 2009; Springer: Berlin/Heidelberg, Germany, 2012; pp. 33–38. [Google Scholar]
- Baasch, K.; Icking, L.; Ruwisch, F.; Schön, S. Coordinate Frames and Transformations in GNSS Ray-Tracing for Autonomous Driving in Urban Areas. Remote. Sens. 2022, 15, 180. [Google Scholar] [CrossRef]
- Ruwisch, F.; Schön, S. GNSS Feature Map Aided RTK Positioning in Urban Trenches. In Proceedings of the 26th IEEE International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023.
- Icking, L.; Kersten, T.; Schön, S. Evaluating the urban trench model for improved GNSS positioning in urban areas. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 631–638. [Google Scholar]
- Schaper, A.; Ruwisch, F.; Schön, S. Diffraction Modeling for Improved 3DMA GNSS Urban Navigation. In Proceedings of the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2022), Denver, CO, USA, 19–23 September 2022; pp. 1902–1916. [Google Scholar]
- Friis, H. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2011. [Google Scholar]
- Groves, P. Shadow matching: A new GNSS positioning technique for urban canyons. J. Navig. 2011, 64, 417–430. [Google Scholar] [CrossRef]
- Spilker, J. Tropospheric effects on GPS. In Global Positioning System: Theory and Applications, Volume I; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1996; pp. 517–546. [Google Scholar]
- Meurer, M.; Antreich, F. Signals and modulation. In Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017; pp. 91–119. [Google Scholar]
- Stutzman, W. Polarization in Eelectromagnetic Systems, 2nd ed.; Artech House: Boston, MA, USA, 2018. [Google Scholar]
- Hannah, B. Modelling and Simulation of GPS Multipath Propagation. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2001. [Google Scholar]
- Irsigler, M. Multipath Propagation, Mitigation and Monitoring in the Light of Galileo and the Modernized GPS. Ph.D. Thesis, Universität Der Bundeswehr München, Munich, Germany, 2008. [Google Scholar]
- Smyrnaios, M.; Schön, S.; Liso, M.; Jin, S. Multipath propagation, characterization and modeling in GNSS. In Geodetic Sciences—Observations, Modeling and Applications; InTech: London, UK, 2013; pp. 99–125. [Google Scholar]
- Steigenberger, P.; Thoelert, S.; Montenbruck, O. GNSS satellite transmit power and its impact on orbit determination. J. Geod. 2018, 92, 609–624. [Google Scholar] [CrossRef]
- Orfanidis, S. Electromagnetic Waves and Antennas; Rutgers University: New Brunswick, NJ, USA, 2016 [Online Book]. Available online: https://www.ece.rutgers.edu/orfanidi/ewa/ (accessed on 30 July 2023).
- Zhang, G.; Hsu, L. Performance assessment of GNSS diffraction models in urban areas. Navigation 2021, 68, 369–389. [Google Scholar] [CrossRef]
- Torrico, S. Theoretical Modeling of Foliage Effects on Path Loss for Residential Environments. Ph.D. Thesis, The George Washington University, Washington, DC, USA, 1998. [Google Scholar]
- Spilker, J., Jr. Foliage attenuation for land mobile users. Glob. Position. Syst. Theory Appl. 1996, 1, 569–583. [Google Scholar]
- Goldhirsh, J.; Vogel, W. Mobile satellite system fade statistics for shadowing and multipath from roadside trees at UHF and L-band. IEEE Trans. Antennas Propag. 1989, 37, 489–498. [Google Scholar] [CrossRef]
- Torrico, S.; Bertoni, H.; Lang, R. Modeling tree effects on path loss in a residential environment. IEEE Trans. Antennas Propag. 1998, 46, 872–880. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Phase | |
|---|---|---|
| GPS |  | |
| GLONASS |  | |
| Block | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IIF/III | 13.75 | 13.8 | 14 | 14.3 | 14.51 | 14.75 | 15 | 15.45 | 15.6 | 15.7 | 15.8 | 15.7 | 15.55 | 15.25 | 14.8 |
| IIR | 13.0 | 13.2 | 13.45 | 13.6 | 13.9 | 14.25 | 14.5 | 15.0 | 15.1 | 15.3 | 15.3 | 15.15 | 14.85 | 14.4 | 13.5 |
| IIRM | 11.9 | 11.9 | 11.925 | 11.95 | 12.1 | 12.5 | 13 | 13.7 | 14.45 | 14.75 | 15.125 | 15.25 | 15.125 | 14.8 | 14.5 |
| Visibility Type | LOS | MP | NLOS | BLKD |
|---|---|---|---|---|
| Mean of Difference [dB-Hz] | 1.78 | 3.21 | 11.90 | 8.74 |
| Phase | |
|---|---|
| GPS |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karimidoona, A.; Schön, S. Predicting C/N0 as a Key Parameter for Network RTK Integrity Prediction in Urban Environments. Remote Sens. 2023, 15, 4850. https://doi.org/10.3390/rs15194850
Karimidoona A, Schön S. Predicting C/N0 as a Key Parameter for Network RTK Integrity Prediction in Urban Environments. Remote Sensing. 2023; 15(19):4850. https://doi.org/10.3390/rs15194850
Chicago/Turabian StyleKarimidoona, Ali, and Steffen Schön. 2023. "Predicting C/N0 as a Key Parameter for Network RTK Integrity Prediction in Urban Environments" Remote Sensing 15, no. 19: 4850. https://doi.org/10.3390/rs15194850
APA StyleKarimidoona, A., & Schön, S. (2023). Predicting C/N0 as a Key Parameter for Network RTK Integrity Prediction in Urban Environments. Remote Sensing, 15(19), 4850. https://doi.org/10.3390/rs15194850