



GSDerainNet: A Deep Network Architecture Based on a Gaussian Shannon Filter for Single Image Deraining

Abstract
:1. Introduction
2. Related Works
3. Materials and Methods
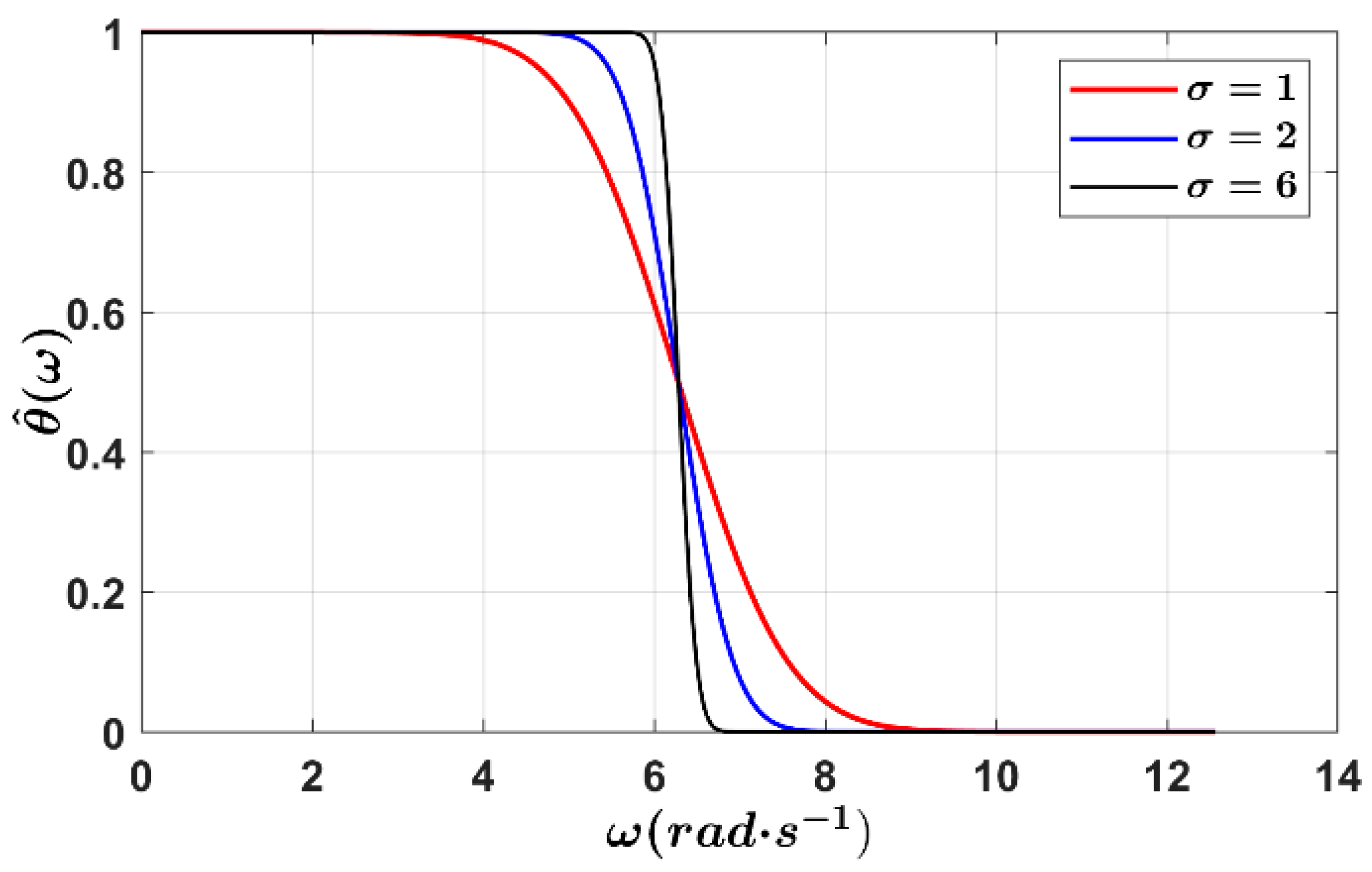
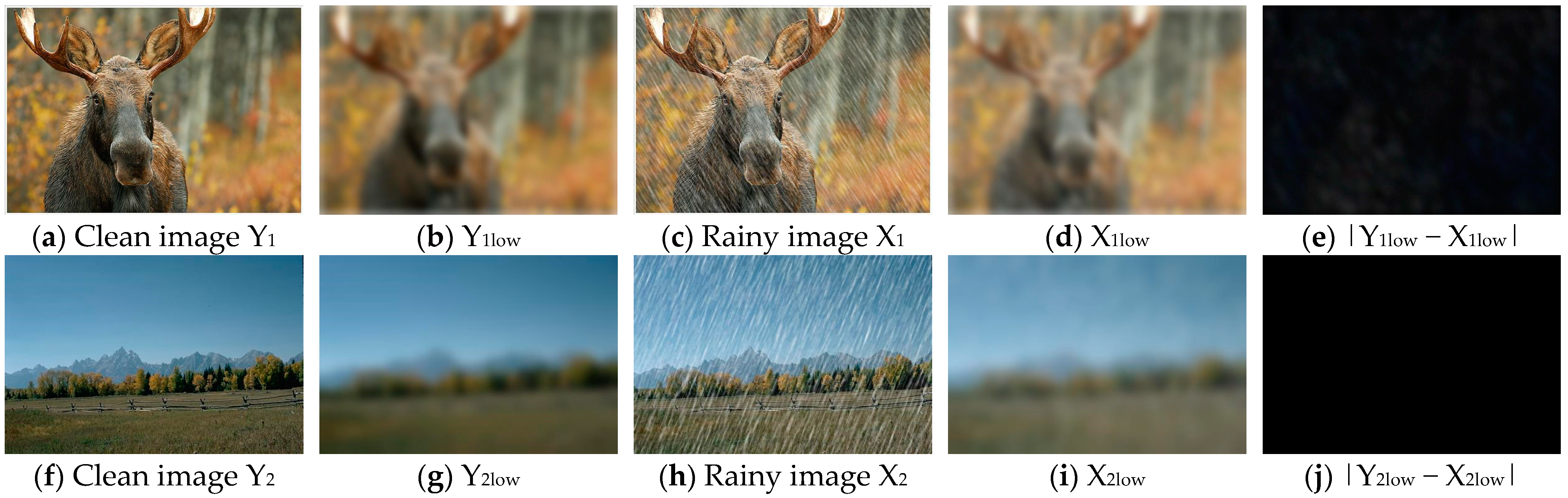
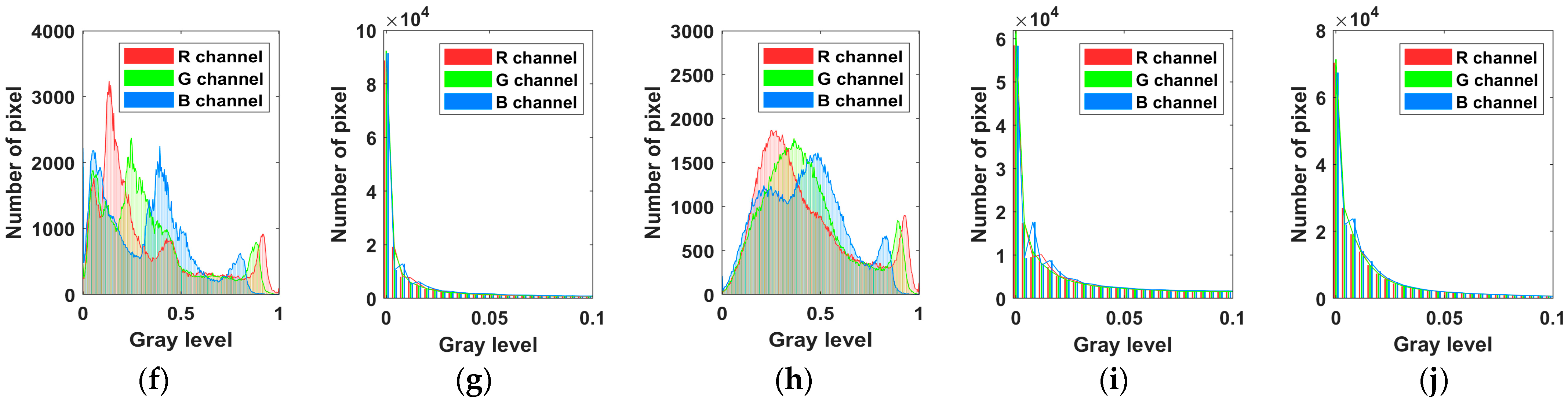
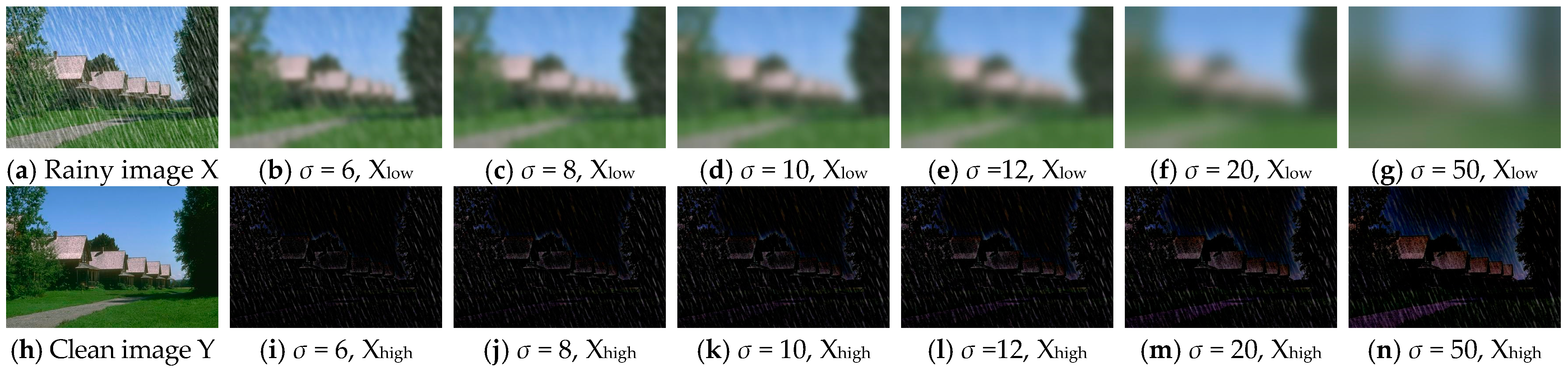
3.1. Gaussian Shannon Filter for the Rain Feature Layer
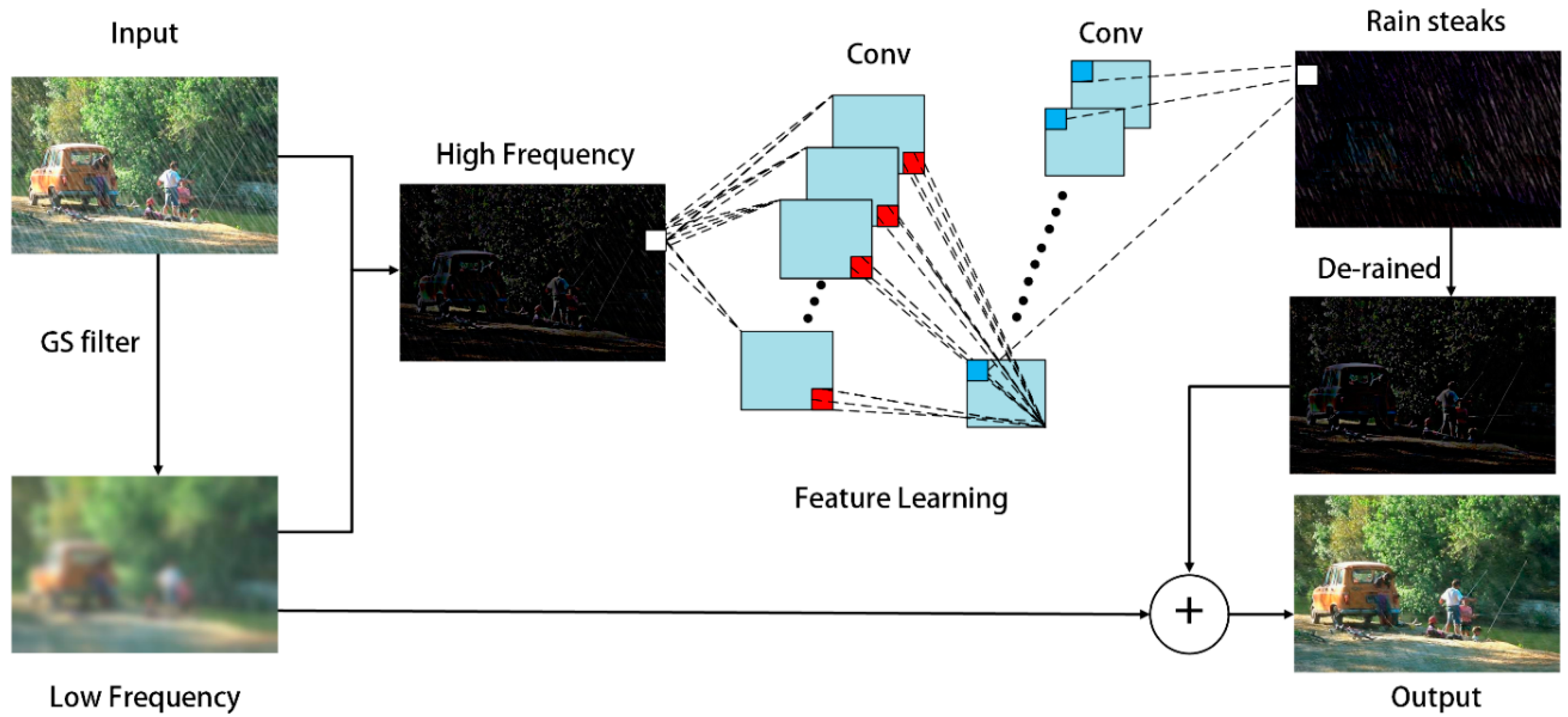
3.2. Our Network Structure
4. Experiments
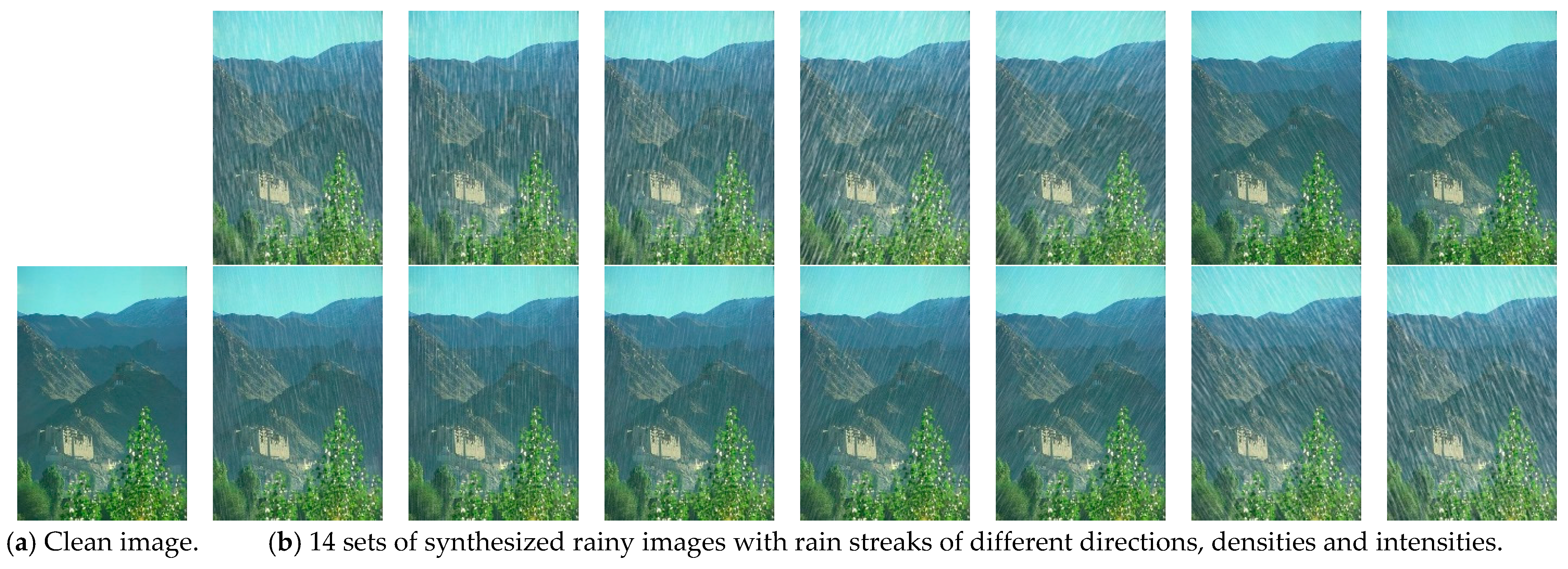
4.1. Datasets and Parameter Settings
4.2. Results
4.2.1. Results on Synthetic Datasets
4.2.2. Results on Real-World Datasets
5. Discussion
5.1. Impact of Patch Size
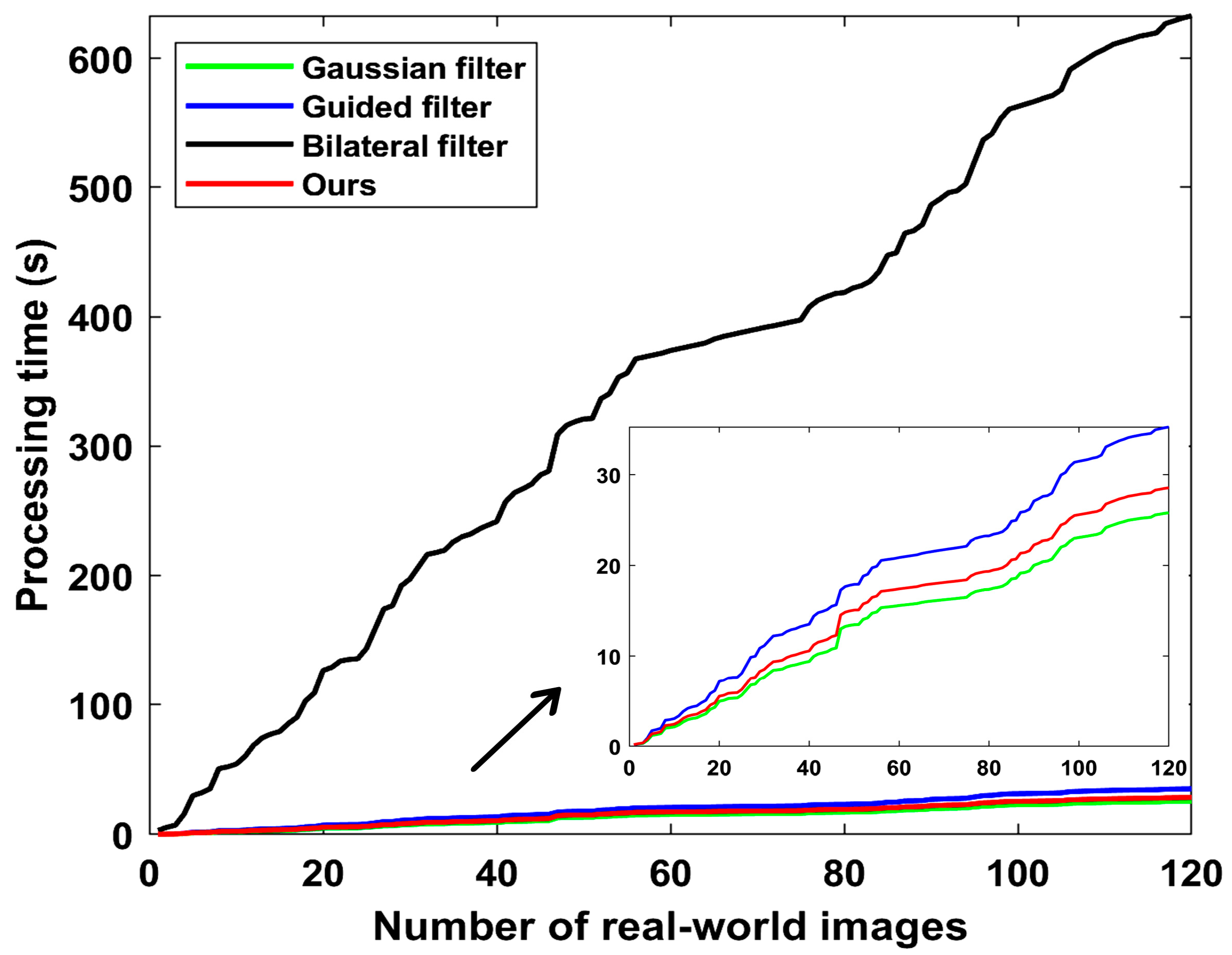
5.2. Testing Runtime
6. Conclusions
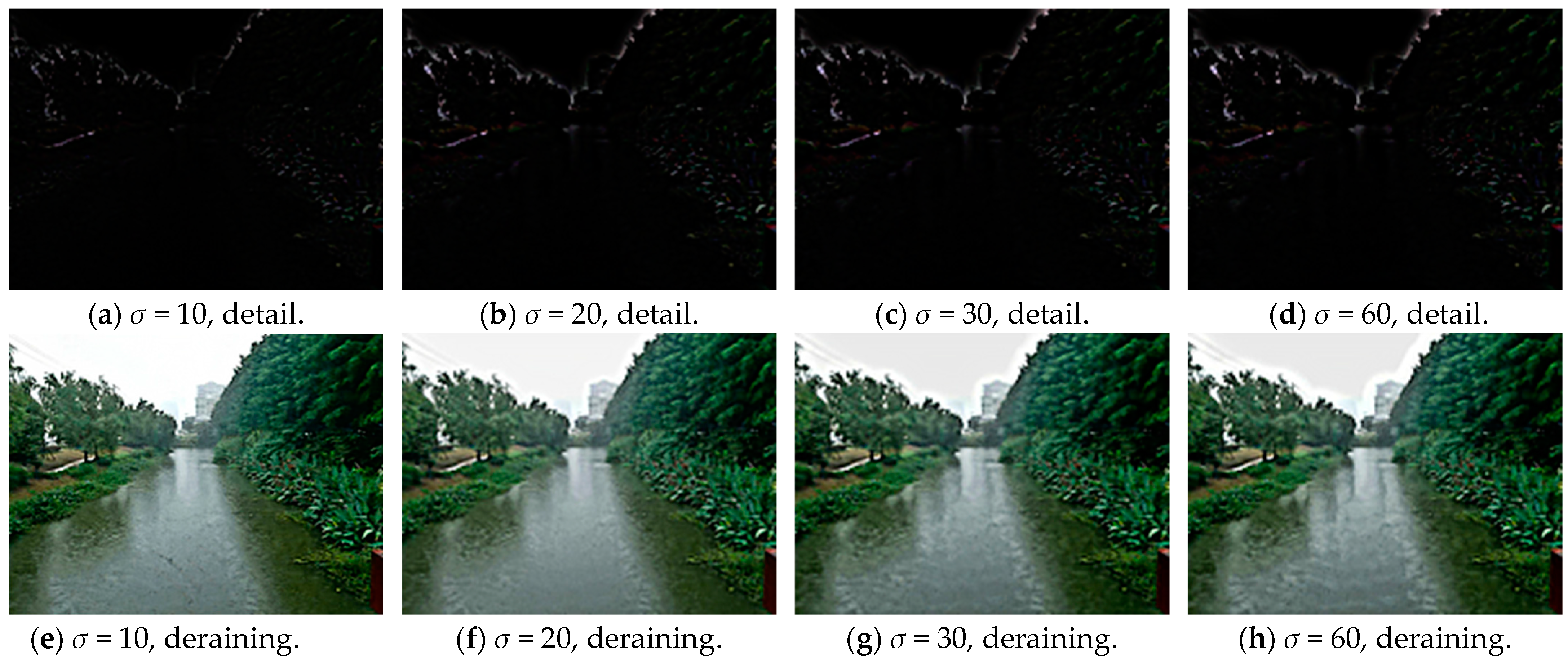
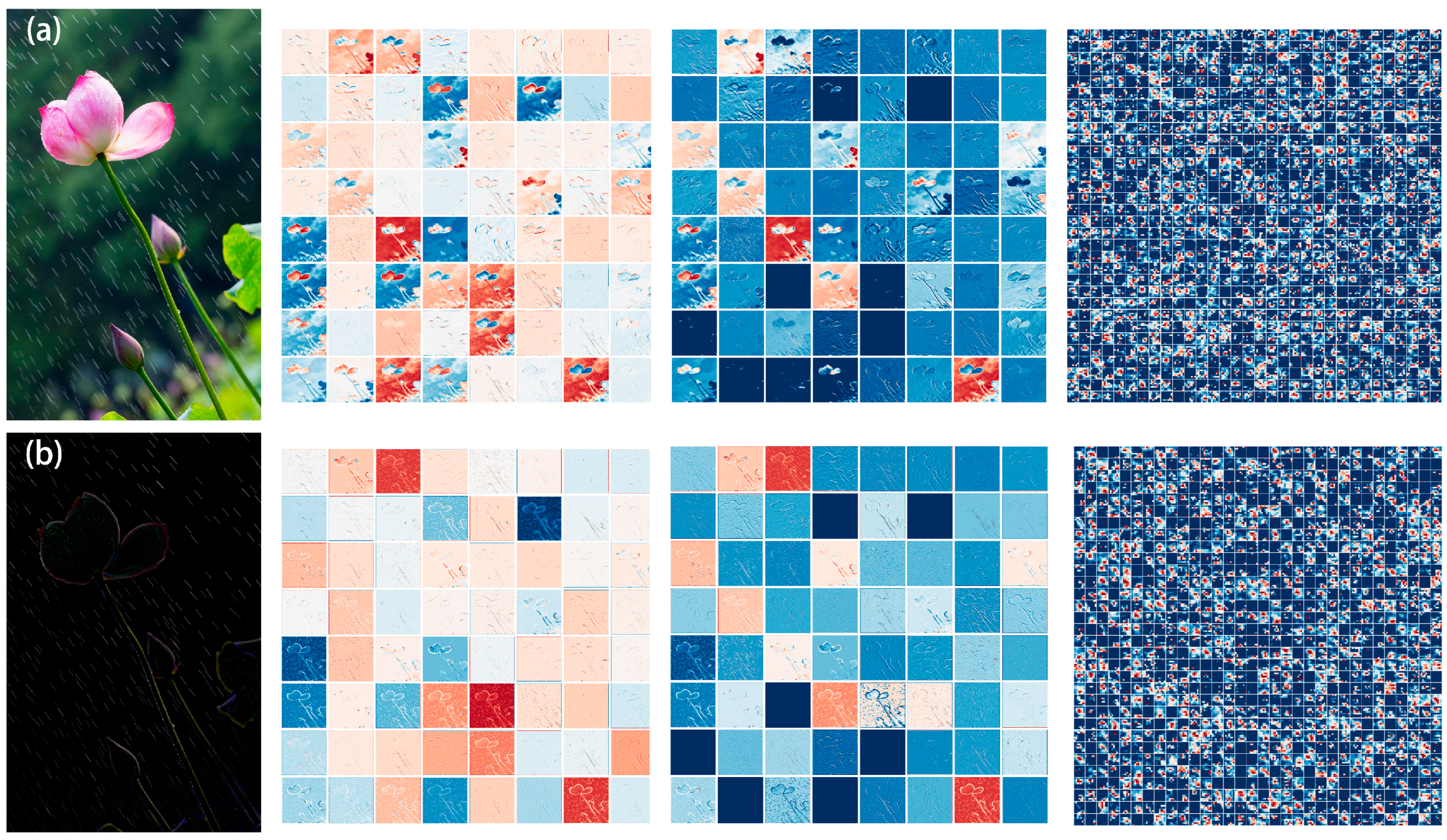
- We define the GS filter and give its general mathematical formula. The developed model is flexible and can adjust the GS filtering technique to extract rain features according to the degree of rain streaks in the input image. The range of morphological artifacts produced by filtering is suppressed by adjusting the transition band parameter.
- The whole rainy image does not need to enter the model; only the high-frequency part is input into the model training process, which reduces the number of pixels in the model operation. In addition, under the premise of ensuring the filtering effect, our method has a faster testing speed than models based on guided filters and bilateral filters.
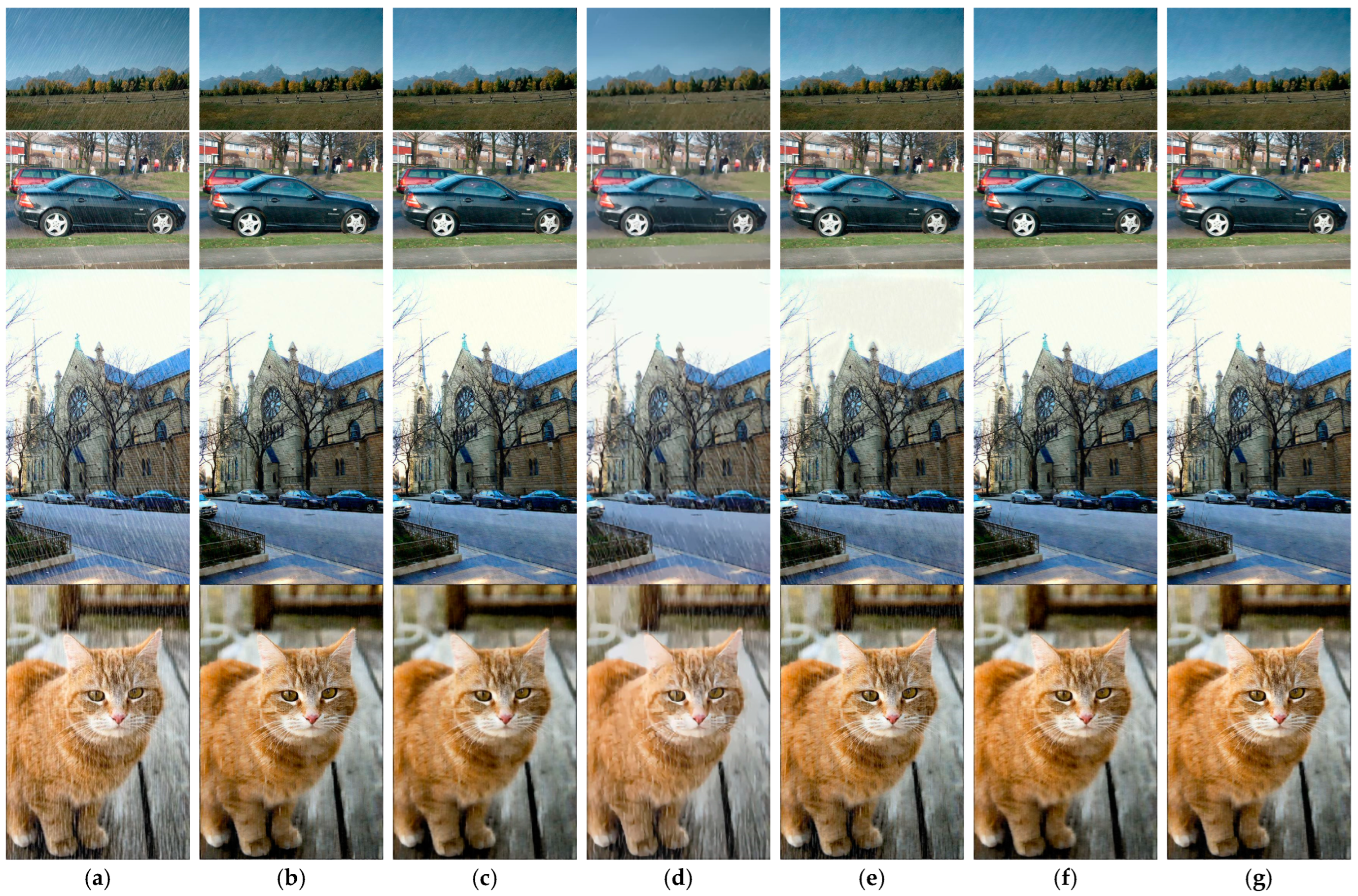
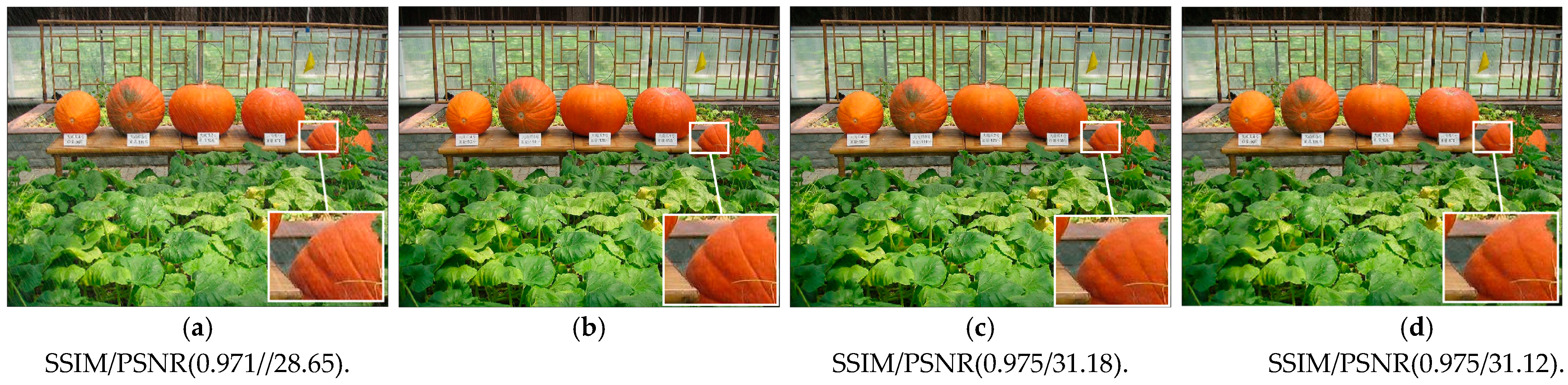
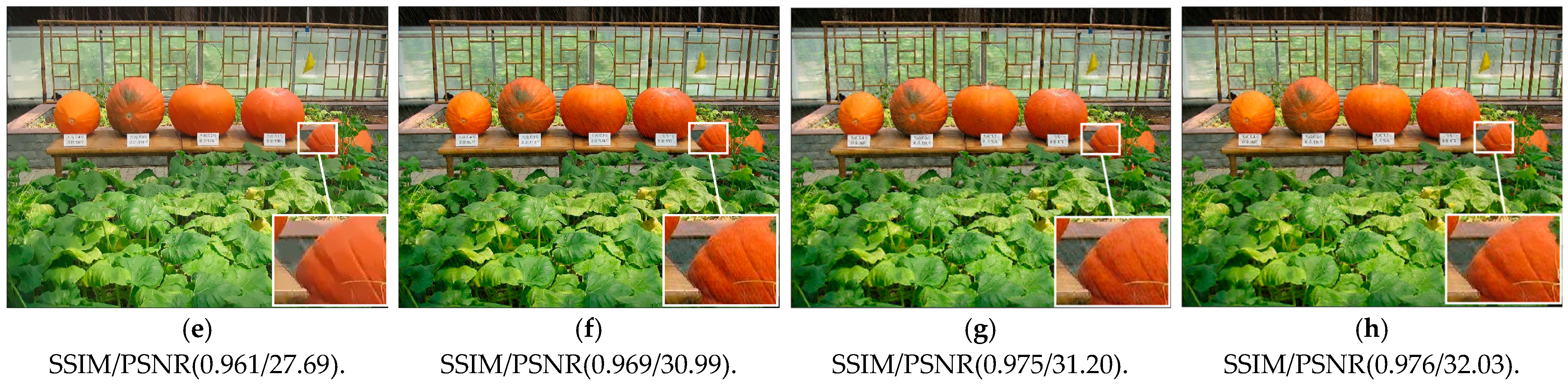
- Our model shows significant improvement compared to five state-of-the-art methods. In both comparison cases of the same model structure with different filters and different model structures, our model retains a finer image object structure and avoids over-smoothing and color distortion.
- Our model has good generalization ability. We train the model on synthetic data, but the model is equally applicable to real-world datasets. Experimental results obtained on public datasets show that the model based on GS filtering has obvious advantages in terms of image quality and computational efficiency.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xi, Y.; Jia, W.; Miao, Q.; Feng, J.; Liu, X.; Li, F. CoDerainNet: Collaborative Deraining Network for Drone-View Object Detection in Rainy Weather Conditions. Remote Sens. 2023, 15, 1487. [Google Scholar] [CrossRef]
- Hu, X.; Xu, X.; Xiao, Y.; Chen, H.; He, S.; Qin, J.; Heng, P.-A. SINet: A scale-insensitive convolutional neural network for fast vehicle detection. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1010–1019. [Google Scholar] [CrossRef]
- Janai, J.; Güney, F.; Behl, A.; Geiger, A.; Graphics, T. Computer vision for autonomous vehicles: Problems, datasets and state of the art. In Foundations and Trends® in Computer Graphics and Vision; Now Publishers Inc.: Delft, The Netherlands, 2020; Volume 12, pp. 1–308. [Google Scholar]
- Hu, C.; Wang, H. Enhancing Rainy Weather Driving: Deep Unfolding Network with PGD Algorithm for Single Image Deraining. IEEE Access 2023, 11, 57616–57626. [Google Scholar] [CrossRef]
- Li, R.; Tan, R.; Cheong, L.; Aviles-Rivero, A.; Fan, Q.; Schonlieb, C. Rainflow: Optical flow under rain streaks and rain veiling effect. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 7304–7313. [Google Scholar]
- Islam, M.R.; Paul, M. Video Deraining Using the Visual Properties of Rain Streaks. IEEE Access 2022, 10, 202–212. [Google Scholar] [CrossRef]
- Abdel-Hakim, A.E. A Novel Approach for Rain Removal from Videos Using Low-Rank Recovery. In Proceedings of the 2014 5th International Conference on Intelligent Systems, Modelling and Simulation, Langkawi, Malaysia, 27–29 January 2014; pp. 351–356. [Google Scholar]
- Dou, Y.; Zhang, P.; Zhou, Y.; Zhang, L. A Tensor Modeling for Video Rain Streaks Removal Approach Based on the Main Direction of Rain Streaks. In Proceedings of the 2020 17th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 18–20 December 2020; pp. 380–383. [Google Scholar]
- Lee, K.-H.; Ryu, E.; Kim, J.-O. Progressive Rain Removal via a Recurrent Convolutional Network for Real Rain Videos. IEEE Access 2020, 8, 203134–203145. [Google Scholar] [CrossRef]
- Ahn, N.; Jo, S.Y.; Kang, S. Eagnet: Elementwise attentive gating network-based single image de-raining with rain simplification. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 608–620. [Google Scholar] [CrossRef]
- Li, Y.; Tan, R.; Guo, X.; Lu, J.; Brown, M.S. Rain streak removal using layer priors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2736–2744. [Google Scholar]
- Luo, Y.; Xu, Y.; Ji, H. Removing rain from a single image via discriminative sparse coding. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3397–3405. [Google Scholar]
- Zheng, X.; Liao, Y.; Guo, W.; Fu, X.; Ding, X. Single-image-based rain and snow removal using multi-guided filter. In Proceedings of the International Conference on Neural Information Processing, Daegu, Republic of Korea, 3–7 November 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 258–265. [Google Scholar]
- Li, Z.; Zheng, J.; Zhu, Z.; Yao, W.; Wu, S. Weighted guided image filtering. IEEE Trans. Image Process. 2015, 24, 120–129. [Google Scholar]
- Li, Z.; Zheng, J. Single image de-hazing using globally guided image filtering. IEEE Trans. Image Process. 2017, 27, 442–450. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Wang, W.; Pang, C.; Lan, R.; Luo, X. Rain-Density Squeeze-and-Excitation Residual Network for Single Image Rain-removal. In Proceedings of the 2019 Eleventh International Conference on Advanced Computational Intelligence (ICACI), Guilin, China, 7–9 November 2019; pp. 284–289. [Google Scholar]
- Yang, W.; Tan, R.; Feng, J.; Guo, Z.; Yan, S.; Liu, J. Joint Rain Detection and Removal from a Single Image with Contextualized Deep Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 1377–1393. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhao, X.; Jiang, T.; Deng, L.; Chang, Y.; Huang, T. Rain Streaks Removal for Single Image via Kernel-Guided Convolutional Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3664–3676. [Google Scholar] [CrossRef] [PubMed]
- Jang, Y.; Son, C.; Choo, H. Lightweight Deep Extraction Networks for Single Image De-raining. In Proceedings of the 2021 15th International Conference on Ubiquitous Information Management and Communication (IMCOM), Seoul, Republic of Korea, 4–6 January 2021; pp. 1–4. [Google Scholar]
- Wang, H.; Xie, Q.; Wu, Y.; Zhao, Q.; Meng, D. Single image rain streaks removal: A review and an exploration. Int. J. Mach. Learn. Cybern. 2020, 11, 853–872. [Google Scholar] [CrossRef]
- Li, R.; Cheong, L.; Tan, R. Heavy rain image restoration: Integrating physics model and conditional adversarial learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1633–1642. [Google Scholar]
- Wang, G.; Sun, C.; Sowmya, A. Erl-net: Entangled representation learning for single image de-raining. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 5644–5652. [Google Scholar]
- Fu, X.; Huang, J.; Ding, X.; Liao, Y.; Paisley, J. Clearing the skies: A deep network architecture for single-image rain removal. IEEE Trans. Image Process. 2017, 26, 2944–2956. [Google Scholar] [CrossRef]
- Yang, W.; Tan, R.; Feng, J.; Liu, J.; Guo, Z.; Yan, S. Deep joint rain detection and removal from a single image. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1357–1366. [Google Scholar]
- Fu, X.; Huang, J.; Zeng, D.; Huang, Y.; Ding, X.; Paisley, J. Removing rain from single images via a deep detail network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 3855–3863. [Google Scholar]
- Zhang, H.; Patel, V.M. Density-aware single image de-raining using a multi-stream dense network. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 695–704. [Google Scholar]
- Wang, T.; Yang, X.; Xu, K.; Chen, S.; Zhang, Q.; Lau, R.W. Spatial attentive single-image deraining with a high quality real rain dataset. In Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 12270–12279. [Google Scholar]
- Wang, H.; Xie, Q.; Zhao, Q.; Meng, D. A model-driven deep neural network for single image rain removal. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 3103–3112. [Google Scholar]
- Chen, D.; Chen, C.; Kang, L. Visual Depth Guided Color Image Rain Streaks Removal Using Sparse Coding. IEEE Trans. Circuits Syst. Video Technol. 2014, 24, 1430–1455. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Zhao, W.; Liu, P.; Tang, X. Removing rain and snow in a single image using guided filter. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; pp. 304–307. [Google Scholar]
- Yeh, C.H.; Liu, P.; Yu, C.; Lin, C. Single image rain removal based on part-based model. In Proceedings of the 2015 IEEE International Conference on Consumer Electronics, Taipei, Taiwan, 6–8 June 2015; pp. 462–463. [Google Scholar]
- Shi, Z.; Li, Y.; Zhao, M.; Feng, Y.; He, L. Multi-stage filtering for single rainy image enhancement. IET Image Process. 2018, 12, 1866–1872. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the International Conference on Computer Vision (ICCV), Bombay, India, 4–7 January 1998; pp. 839–846. [Google Scholar]
- Pal, N.S.; Lal, S.; Shinghal, K. A Visibility Restoration Framework for rainy images by using L0 gradient minimization and Bilateral Filtering. In Proceedings of the 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Uttar Pradesh, India, 12–13 October 2018; pp. 848–852. [Google Scholar]
- Du, S.; Liu, Y.; Ye, M.; Xu, Z.; Li, J.; Liu, J. Single image deraining via decorrelating the rain streaks and background scene in gradient domain. Pattern Recognit. 2018, 79, 303–317. [Google Scholar] [CrossRef]
- Pan, J.; Sun, D.; Zhang, J.; Tang, J.; Yang, J.; Tai, Y.; Yang, M. Dual Convolutional Neural Networks for Low-Level Vision. Int. J. Comput. Vis. 2022, 130, 1440–1458. [Google Scholar] [CrossRef]
- Ye, Y.; Chang, Y.; Zhou, H.; Yan, L. Closing the loop: Joint rain generation and removal via disentangled image translation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 2053–2062. [Google Scholar]
- Kang, L.W.; Lin, C.W.; Fu, Y. Automatic single-image-based rain streaks removal via image decomposition. IEEE Trans. Image Process. 2011, 21, 1742–1755. [Google Scholar] [CrossRef]
- Huang, D.; Kang, L.; Wang, Y.; Lin, C. Self-learning based image decomposition with applications to single image denoising. IEEE Trans. Multimed. 2013, 16, 83–93. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 1–11. [Google Scholar]
- Zhang, H.; Sindagi, V.; Patel, V.M. Image De-Raining Using a Conditional Generative Adversarial Network. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 3943–3956. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Huynh-Thu, Q.; Ghanbari, M. Scope of validity of PSNR in image/video quality assessment. Electron. Lett. 2008, 44, 800–801. [Google Scholar] [CrossRef]
- Moorthy, A.K.; Bovik, A.C. A two-step framework for constructing blind image quality indices. IEEE Signal Process. Lett. 2010, 17, 513–516. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Rainy Image | Method [23] | Method [25] | Method [37] | Gaussian Filter-Based | Bilateral Filter-Based | Ours |
|---|---|---|---|---|---|---|---|
| Forest | 0.897 | 0.953 | 0.953 | 0.867 | 0.944 | 0.951 | 0.954 |
| Car | 0.958 | 0.970 | 0.969 | 0.851 | 0.961 | 0.970 | 0.970 |
| House | 0.900 | 0.955 | 0.954 | 0.889 | 0.927 | 0.956 | 0.956 |
| Cat | 0.862 | 0.912 | 0.915 | 0.772 | 0.893 | 0.917 | 0.920 |
| Rain 1200 [26] | 0.950 | 0.959 | 0.959 | 0.890 | 0.953 | 0.958 | 0.959 |
| Rain 1400 [23] | 0.874 | 0.938 | 0.937 | 0.854 | 0.916 | 0.938 | 0.940 |
| Rain 2800 [25] | 0.868 | 0.937 | 0.934 | 0.830 | 0.906 | 0.934 | 0.938 |
| Datasets | Rainy Image | Method [23] | Method [25] | Method [37] | Gaussian Filter-Based | Bilateral Filter-Based | Ours |
|---|---|---|---|---|---|---|---|
| Forest | 27.26 | 31.35 | 31.58 | 24.61 | 31.34 | 31.39 | 31.58 |
| Car | 27.31 | 28.60 | 28.59 | 23.89 | 27.58 | 28.28 | 28.68 |
| House | 22.31 | 28.99 | 28.90 | 21.46 | 27.08 | 29.22 | 29.15 |
| Cat | 21.33 | 27.85 | 27.92 | 20.55 | 26.54 | 28.27 | 28.28 |
| Rain 1200 [26] | 27.68 | 27.29 | 27.29 | 24.41 | 28.51 | 28.69 | 28.71 |
| Rain 1400 [23] | 23.67 | 28.17 | 28.22 | 22.52 | 27.37 | 28.31 | 28.35 |
| Rain 2800 [25] | 22.82 | 28.16 | 28.05 | 21.41 | 26.63 | 28.15 | 28.18 |
| Datasets | Input | Method [23] | Method [25] | Method [37] | Gaussian Filter-Based | Bilateral Filter-Based | Ours |
|---|---|---|---|---|---|---|---|
| Leaves | 29.23 | 26.75 | 26.73 | 33.70 | 25.56 | 26.56 | 26.61 |
| Passerby | 37.69 | 31.49 | 30.80 | 40.14 | 30.89 | 32.98 | 30.80 |
| Bridge | 27.96 | 26.48 | 24.94 | 37.84 | 25.06 | 27.97 | 24.82 |
| Bike | 29.90 | 31.02 | 30.30 | 37.96 | 28.22 | 28.42 | 28.17 |
| Practical 15 [24] | 32.53 | 28.28 | 28.18 | 35.90 | 29.11 | 28.81 | 28.16 |
| Real-world 120 | 32.11 | 30.31 | 29.85 | 40.10 | 30.11 | 31.10 | 29.76 |
| Patch Size | 32 × 32 × 3 | 64 × 64 × 3 | 128 × 128 × 3 | |||
|---|---|---|---|---|---|---|
| SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | |
| Rain 100 test [42] | 0.735 | 15.18 | 0.867 | 21.61 | 0.859 | 21.79 |
| Method | Gaussian Filter | Guided Filter | Bilateral Filter | Ours |
|---|---|---|---|---|
| Transform domain | Frequency domain | Time domain | Time domain | Time domain |
| running time (seconds) | 0.21 | 0.29 | 5.27 | 0.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Shi, Z.; Hu, H.; Li, J.; Wang, G.; Liu, L. GSDerainNet: A Deep Network Architecture Based on a Gaussian Shannon Filter for Single Image Deraining. Remote Sens. 2023, 15, 4825. https://doi.org/10.3390/rs15194825
Yao Y, Shi Z, Hu H, Li J, Wang G, Liu L. GSDerainNet: A Deep Network Architecture Based on a Gaussian Shannon Filter for Single Image Deraining. Remote Sensing. 2023; 15(19):4825. https://doi.org/10.3390/rs15194825
Chicago/Turabian StyleYao, Yanji, Zhimin Shi, Huiwen Hu, Jing Li, Guocheng Wang, and Lintao Liu. 2023. "GSDerainNet: A Deep Network Architecture Based on a Gaussian Shannon Filter for Single Image Deraining" Remote Sensing 15, no. 19: 4825. https://doi.org/10.3390/rs15194825
APA StyleYao, Y., Shi, Z., Hu, H., Li, J., Wang, G., & Liu, L. (2023). GSDerainNet: A Deep Network Architecture Based on a Gaussian Shannon Filter for Single Image Deraining. Remote Sensing, 15(19), 4825. https://doi.org/10.3390/rs15194825