

Method for Determining Coastline Course Based on Low-Altitude Images Taken by a UAV



Abstract
:1. Introduction
2. Materials and Methods
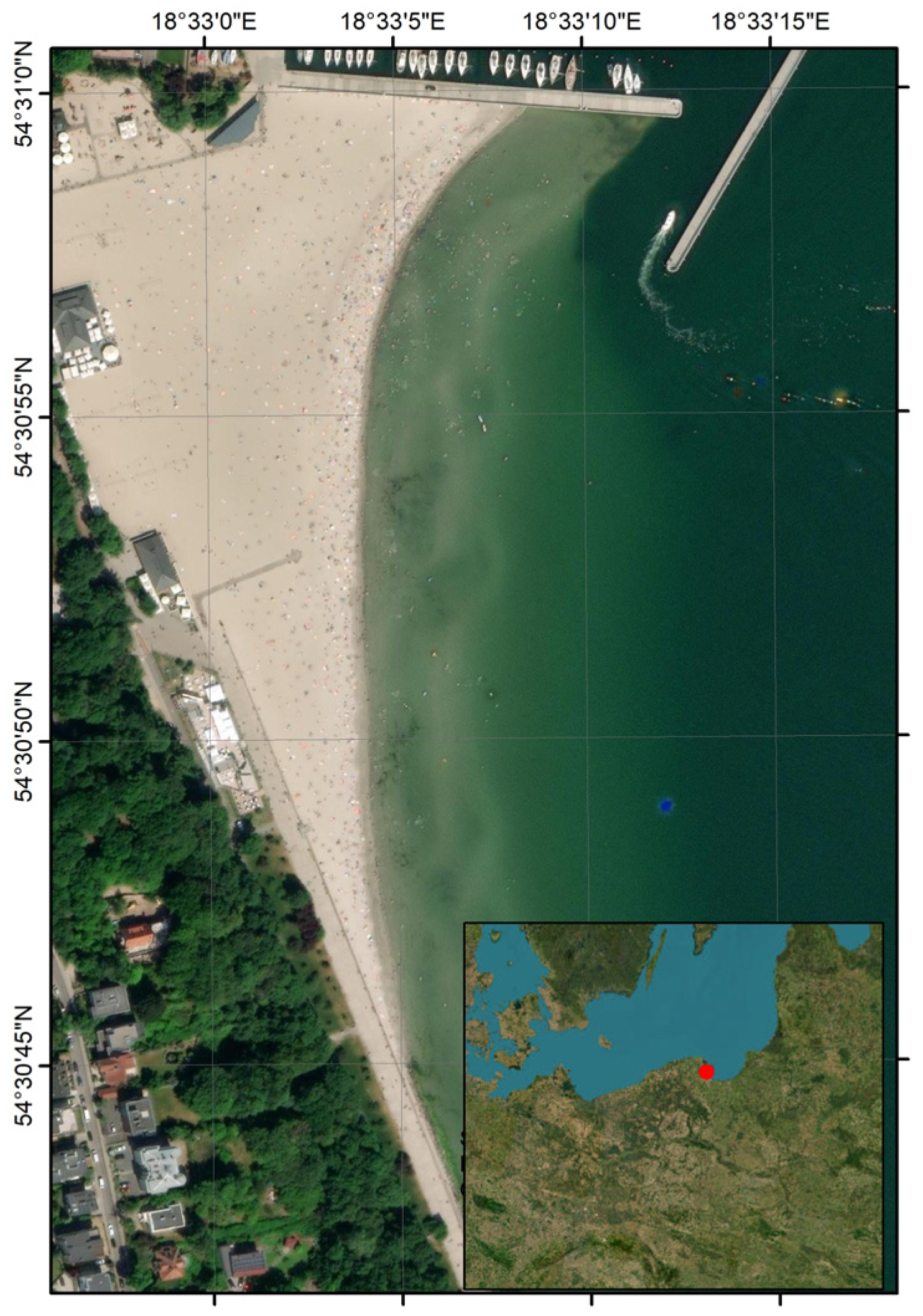
2.1. Measurement Place
2.2. Measurement Equipment, Software, and Tools
- The DJI Matrice 300 RTK UAV is a quadrocopter from an industrial Matrice series and the latest commercial representative from the DJI Enterprise segment. One of the main advantages of this drone is the RTK module, thanks to which high-resolution images can be obtained. It is equipped with advanced Artificial Intelligence (AI) systems and a number of safeguards to protect the device from damage. The drone has a DJI Zenmuse P1 camera with a focal length of 35 mm and an aperture of f/2.8–f/16. It is the first camera produced by DJI with a full-frame CMOS sensor with a resolution of 45 Mpx. The camera has a mechanical global shutter, which enables a series of photos to be taken effectively without the risk of rolling shutter and blurry images at higher flight speeds;
- Pléiades Neo satellite imagery with a spatial resolution of 0.5 m, taken on 31 December 2020 and Hexagon Europe satellite images with a resolution of 0.3 m, made on 18 May 2022. These were the most recent satellite images that were taken for the study area with a resolution not smaller than 0.5 m. Both data sources were downloaded in GeoTIFF format;
- The Trimble R10 GNSS RTK receiver incorporates a GNSS antenna, internal radio, receiver, and battery in a rugged light-weight unit that is suited as an all-on-the-pole RTK rover or quick-setup/rapid-mobilisation base station. It enables simultaneous tracking of satellite signals from the following systems: Global Positioning System (GPS), GLObal NAvigation Satellite System (GLONASS), Satellite-Based Augmentation System (SBAS), and Galileo and BeiDou Navigation Satellite System (BDS). The Trimble R10 GNSS RTK operating in RTK mode allows positioning accuracies amounting to 8 mm + 1 ppm Root Mean Square (RMS) in the horizontal plane and 15 mm + 1 ppm RMS in the vertical plane;
- Pix4Dmapper 4.8.4 software offers a wide range of products that are used to develop images from photogrammetric flight passes made by UAVs. This program allows creation of high-quality DTMs, orthophotomaps, point clouds, and 3D models;
- ArcMap 10.7 software is used to analyse, create, edit, and view geospatial data. Thanks to this program, users can examine data within a data set, symbolise characteristics appropriately, and produce maps. In addition to this software, the Digital Shoreline Analysis System (DSAS) plug-in was installed, and enables calculation of rate-of-change statistics from multiple historical shoreline positions [42,43].
2.3. Realisation and Processing of Geodetic, Photogrammetric, and Satellite Measurements
- XBL, YBL—flat coordinates of the points that determine the baseline in the PL-Universal Transverse Mercator (UTM) system (m);
- b—slope of the baseline (–);
- a—x-intercept of the baseline (m).
- —flat coordinates of the points that determine the i-th line perpendicular to the baseline in the PL-UTM system (m);
- i—numbering of perpendicular lines (–).
- —flat coordinates of the baseline intersection points with the i-th line perpendicular to it in the PL-UTM system (m);
- —flat coordinates of the coastline intersection points with the i-th line perpendicular to the baseline in the PL-UTM system (m).
3. Results
- For the mean test:
- ○
- H0: ≤ 5 m;
- ○
- H1: > 5 m;
- For the standard deviation test:
- ○
- H0: 1.96 × σΔd ≤ 5 m;
- ○
- H1: 1.96 × σΔd > 5 m.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, Z.; Zhai, J.; Wu, F. Shape Similarity Assessment Method for Coastline Generalization. ISPRS Int. J. Geo-Inf. 2018, 7, 283. [Google Scholar] [CrossRef]
- Sui, L.; Wang, J.; Yang, X.; Wang, Z. Spatial-temporal Characteristics of Coastline Changes in Indonesia from 1990 to 2018. Sustainability 2020, 12, 3242. [Google Scholar] [CrossRef]
- Li, J.; Ye, M.; Pu, R.; Liu, Y.; Guo, Q.; Feng, B.; Huang, R.; He, G. Spatiotemporal Change Patterns of Coastlines in Zhejiang Province, China, Over the Last Twenty-five Years. Sustainability 2018, 10, 477. [Google Scholar] [CrossRef]
- Martínez, C.; Contreras-López, M.; Winckler, P.; Hidalgo, H.; Godoy, E.; Agredano, R. Coastal Erosion in Central Chile: A New Hazard? Ocean Coast. Manag. 2018, 156, 141–155. [Google Scholar] [CrossRef]
- Narra, P.; Coelho, C.; Sancho, F. Multicriteria GIS-based Estimation of Coastal Erosion Risk: Implementation to Aveiro Sandy Coast, Portugal. Ocean Coast. Manag. 2019, 178, 104845. [Google Scholar] [CrossRef]
- Kanwal, S.; Ding, X.; Sajjad, M.; Abbas, S. Three Decades of Coastal Changes in Sindh, Pakistan (1989-2018): A Geospatial Assessment. Remote Sens. 2020, 12, 8. [Google Scholar] [CrossRef]
- Zhang, Y.; Hou, X. Characteristics of Coastline Changes on Southeast Asia Islands from 2000 to 2015. Remote Sens. 2020, 12, 519. [Google Scholar] [CrossRef]
- Mury, A.; Jeanson, M.; Collin, A.; James, D.; Etienne, S. High Resolution Shoreline and Shelly Ridge Monitoring over Stormy Winter Events: A Case Study in the Megatidal Bay of Mont-Saint-Michel (France). J. Mar. Sci. Eng. 2019, 7, 97. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.; Kyriou, A.; Koukouvelas, I.; Zygouri, V.; Apostolopoulos, D. Combination of Aerial, Satellite, and UAV Photogrammetry for Mapping the Diachronic Coastline Evolution: The Case of Lefkada Island. ISPRS Int. J. Geo-Inf. 2019, 8, 489. [Google Scholar] [CrossRef]
- Fu, Y.; Guo, Q.; Wu, X.; Fang, H.; Pan, Y. Analysis and Prediction of Changes in Coastline Morphology in the Bohai Sea, China, Using Remote Sensing. Sustainability 2017, 9, 900. [Google Scholar] [CrossRef]
- Mahamud, U.; Takewaka, S. Shoreline Change around a River Delta on the Cox’s Bazar Coast of Bangladesh. J. Mar. Sci. Eng. 2018, 6, 80. [Google Scholar] [CrossRef]
- Chen, C.; Liang, J.; Xie, F.; Hu, Z.; Sun, W.; Yang, G.; Yu, J.; Chen, L.; Wang, L.; Wang, L.; et al. Temporal and Spatial Variation of Coastline Using Remote Sensing Images for Zhoushan Archipelago, China. Int. J. Appl. Earth Obs. Geoinf. 2022, 107, 102711. [Google Scholar] [CrossRef]
- Martínez, C.; Quezada, M.; Rubio, P. Historical Changes in the Shoreline and Littoral Processes on a Headland Bay Beach in Central Chile. Geomorphology 2011, 135, 80–96. [Google Scholar] [CrossRef]
- Chu, Z.X.; Yang, X.H.; Feng, X.L.; Fan, D.J.; Li, Y.K.; Shen, X.; Miao, A.Y. Temporal and Spatial Changes in Coastline Movement of the Yangtze Delta during 1974-2010. J. Asian Earth Sci. 2013, 66, 166–174. [Google Scholar] [CrossRef]
- Cowart, L.; Corbett, D.R.; Walsh, J.P. Shoreline Change along Sheltered Coastlines: Insights from the Neuse River Estuary, NC, USA. Remote Sens. 2011, 3, 1516–1534. [Google Scholar] [CrossRef]
- Masucci, G.D.; Reimer, J.D. Expanding Walls and Shrinking Beaches: Loss of Natural Coastline in Okinawa Island, Japan. PeerJ 2019, 7, e7520. [Google Scholar] [CrossRef] [PubMed]
- Lowe, M.K.; Adnan, F.A.F.; Hamylton, S.M.; Carvalho, R.C.; Woodroffe, C.D. Assessing Reef-island Shoreline Change Using UAV-derived Orthomosaics and Digital Surface Models. Drones 2019, 3, 44. [Google Scholar] [CrossRef]
- Kuleli, T.; Guneroglu, A.; Karsli, F.; Dihkan, M. Automatic Detection of Shoreline Change on Coastal Ramsar Wetlands of Turkey. Ocean Eng. 2011, 38, 1141–1149. [Google Scholar] [CrossRef]
- Zhang, X.; Pan, D.; Chen, J.; Zhao, J.; Zhu, Q.; Huang, H. Evaluation of Coastline Changes under Human Intervention Using Multi-temporal High-resolution Images: A Case Study of the Zhoushan Islands, China. Remote Sens. 2014, 6, 9930–9950. [Google Scholar] [CrossRef]
- Koljonen, S.; Huusko, A.; Mäki-Petäys, A.; Louhi, P.; Muotka, T. Assessing Habitat Suitability for Juvenile Atlantic Salmon in Relation to In-stream Restoration and Discharge Variability. Restor. Ecol. 2012, 21, 344–352. [Google Scholar] [CrossRef]
- Lane, S.N.; Richards, K.S.; Chandler, J.H. Developments in Monitoring and Modelling Small-scale River Bed Topography. Earth Surf. Process. Landf. 1994, 19, 349–368. [Google Scholar] [CrossRef]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring Sandy Shores Morphologies by DGPS—A Practical Tool to Generate Digital Elevation Models. J. Coast. Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A New Method for Determining the Territorial Sea Baseline Using an Unmanned, Hydrographic Surface Vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Al-Mansoori, S.; Al-Marzouqi, F. Coastline Extraction Using Satellite Imagery and Image Processing Techniques. Int. J. Curr. Eng. Technol. 2016, 6, 1245–1251. [Google Scholar]
- Wang, X.; Liu, Y.; Ling, F.; Liu, Y.; Fang, F. Spatio-temporal Change Detection of Ningbo Coastline Using Landsat Time-series Images during 1976–2015. ISPRS Int. J. Geo-Inf. 2017, 6, 68. [Google Scholar] [CrossRef]
- Maglione, P.; Parente, C.; Vallario, A. Coastline Extraction Using High Resolution WorldView-2 Satellite Imagery. Eur. J. Remote Sens. 2014, 47, 685–699. [Google Scholar] [CrossRef]
- Almonacid-Caballer, J.; Sánchez-García, E.; Pardo-Pascual, J.E.; Balaguer-Beser, A.; Palomar-Vázquez, J. Evaluation of Annual Mean Shoreline Position Deduced from Landsat Imagery as a Mid-term Coastal Evolution Indicator. Mar. Geol. 2016, 372, 79–88. [Google Scholar] [CrossRef]
- Viaña-Borja, S.P.; Ortega-Sánchez, M. Automatic Methodology to Detect the Coastline from Landsat Images with a New Water Index Assessed on Three Different Spanish Mediterranean Deltas. Remote Sens. 2019, 11, 2186. [Google Scholar] [CrossRef]
- Yuan, F.; Sawaya, K.E.; Loeffelholz, B.C.; Bauer, M.E. Land Cover Classification and Change Analysis of the Twin Cities (Minnesota) Metropolitan Area by Multitemporal Landsat Remote Sensing. Remote Sens. Environ. 2005, 98, 317–328. [Google Scholar] [CrossRef]
- Apollo, M.; Jakubiak, M.; Nistor, S.; Lewinska, P.; Krawczyk, A.; Borowski, L.; Specht, M.; Krzykowska-Piotrowska, K.; Marchel, Ł.; Pęska-Siwik, A.; et al. Geodata in Science—A Review of Selected Scientific Fields. Acta Sci. Pol. Form. Circumiectus 2023, 22, 17–40. [Google Scholar] [CrossRef]
- Bayram, B.; Seker, D.Z.; Akpinar, B. Efficiency of Different Machine Learning Methods for Shoreline Extraction from UAV Images. In Proceedings of the 40th Asian Conference on Remote Sensing (ACRS 2019), Daejeon, Republic of Korea, 14–18 October 2019. [Google Scholar]
- Del Pizzo, S.; Angrisano, A.; Gaglione, S.; Troisi, S. Assessment of Shoreline Detection Using UAV. In Proceedings of the 2020 IMEKO TC-19 International Workshop on Metrology for the Sea (MetroSea 2020), Naples, Italy, 5–7 October 2020. [Google Scholar]
- Huang, C.; Zhang, H.; Zhao, J. High-efficiency Determination of Coastline by Combination of Tidal Level and Coastal Zone DEM from UAV Tilt Photogrammetry. Remote Sens. 2020, 12, 2189. [Google Scholar] [CrossRef]
- Templin, T.; Popielarczyk, D.; Kosecki, R. Application of Low-cost Fixed-wing UAV for Inland Lakes Shoreline Investigation. Pure Appl. Geophys. 2018, 175, 3263–3283. [Google Scholar] [CrossRef]
- Wilkowski, W.; Lisowski, M.; Wyszyński, M.; Wierzbicki, D. The Use of Unmanned Aerial Vehicles (Drones) to Determine the Shoreline of Natural Watercourses. J. Water Land Dev. 2017, 35, 259–264. [Google Scholar] [CrossRef]
- IHO. IHO Standards for Hydrographic Surveys, 6th ed.; IHO Publication No. 44; IHO: Monte Carlo, Monaco, 2020. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Dąbrowski, P.; Skóra, M.; Marchel, Ł. Determining the Variability of the Territorial Sea Baseline on the Example of Waterbody Adjacent to the Municipal Beach in Gdynia. Appl. Sci. 2019, 9, 3867. [Google Scholar] [CrossRef]
- Maritime Office in Gdynia. Draft Plan for the Spatial Development of Water of the Sea Port in Gdynia, Preliminary Draft Plan Version (v.0). Available online: https://www.umgdy.gov.pl/wp-content/uploads/2020/11/PZP.GDY_3_prognoza_v0.pdf (accessed on 6 August 2023). (In Polish)
- Maritime Office in Gdynia. Draft Plan for the Spatial Development of Internal Waters of the Gulf of Gdańsk Together with an Environmental Impact Forecast. Available online: https://www.umgdy.gov.pl/wp-content/uploads/2020/10/pzp-zgd-v0-2_projekt_planu_prognoza_prezent.pdf (accessed on 6 August 2023). (In Polish)
- Medvedev, I.P.; Rabinovich, A.B.; Kulikov, E.A. Tidal Oscillations in the Baltic Sea. Oceanology 2013, 53, 526–538. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for Performing Territorial Sea Baseline Measurements in Selected Waterbodies of Poland. Appl. Sci. 2019, 9, 3053. [Google Scholar] [CrossRef]
- Mujabar, S.; Chandrasekar, N. A Shoreline Change Analysis along the Coast between Kanyakumari and Tuticorin, India, Using Digital Shoreline Analysis System. Geo-Spat. Inf. Sci. 2011, 14, 282–293. [Google Scholar]
- USGS. Digital Shoreline Analysis System (DSAS). Available online: https://www.usgs.gov/centers/whcmsc/science/digital-shoreline-analysis-system-dsas (accessed on 6 August 2023).
- Kacprzak, M.; Wodziński, K. Execution of Photo Mission by Manned Aircraft and Unmanned Aerial Vehicle. Trans. Inst. Aviat. 2016, 2, 130–141. (In Polish) [Google Scholar] [CrossRef]
- Witek, M.; Jeziorska, J.; Niedzielski, T. Possibilities of Using Unmanned Air Photogrammetry to Identify Anthropogenic Transformations in River Channel. Landf. Anal. 2013, 24, 115–126. (In Polish) [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lewicka, O.; Makar, A.; Burdziakowski, P.; Dąbrowski, P. Study on the Coastline Evolution in Sopot (2008–2018) Based on Landsat Satellite Imagery. J. Mar. Sci. Eng. 2020, 8, 464. [Google Scholar] [CrossRef]
- Farris, A.S.; Weber, K.M.; Doran, K.S.; List, J.H. Comparing Methods Used by the U.S. Geological Survey Coastal and Marine Geology Program for Deriving Shoreline Position from LiDAR Data. Available online: https://pubs.usgs.gov/of/2018/1121/ofr20181121.pdf (accessed on 6 August 2023).
- Xu, S.; Ye, N.; Xu, S. A New Method for Shoreline Extraction from Airborne LiDAR Point Clouds. Remote Sens. Lett. 2019, 10, 496–505. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance Difference | Median (m) | Standard Deviation (m) | Mean (m) | Min. (m) | Quantile 0.25 (m) | Quantile 0.50 (m) | Quantile 0.75 (m) | Max (m) |
|---|---|---|---|---|---|---|---|---|
| Δd Orthophotomosaic | 0.478 | 0.239 | 0.485 | 0.003 | 0.32 | 0.478 | 0.638 | 1.232 |
| Δd DSM | 0.459 | 0.355 | 0.503 | 0.001 | 0.206 | 0.459 | 0.717 | 1.503 |
| Δd Pléiades Neo | 5.481 | 3.249 | 5.233 | 0.002 | 2.258 | 5.481 | 7.794 | 11.922 |
| Δd Hexagon Europe | 10.519 | 4.714 | 8.533 | 0.373 | 3.708 | 10.519 | 12.647 | 14.941 |
| Distance Difference | Mean Test | Standard Deviation Test | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| T Critical (m) | t-Statistic (m) | Conf. Interval (m) | Test Power (–) | H0 | H1 | χ2 Statistic (m) | Conf. Interval (m) | Test Power (–) | H0 | H1 | |
| Δd Orthophotomosaic | 1.648 | 402.254 | (0.4, inf) | 1.0 | No reject | Reject | 4.015 | (423.8, inf) | 1.0 | No reject | Reject |
| Δd DSM | 1.648 | 29.635 | (0.4, inf) | 1.0 | No reject | Reject | 8.679 | (417.0, inf) | 1.0 | No reject | Reject |
| Δd Pléiades Neo | 1.648 | 1.536 | (0.5, inf) | 0.2 | No reject | Reject | 742.696 | (409.4, inf) | 1.0 | Reject | No reject |
| Δd Hexagon Europe | 1.648 | 16.054 | (8.2, inf) | 1.0 | Reject | No reject | 1564.081 | (426.7, inf) | 1.0 | Reject | No reject |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marchel, Ł.; Specht, M. Method for Determining Coastline Course Based on Low-Altitude Images Taken by a UAV. Remote Sens. 2023, 15, 4700. https://doi.org/10.3390/rs15194700
Marchel Ł, Specht M. Method for Determining Coastline Course Based on Low-Altitude Images Taken by a UAV. Remote Sensing. 2023; 15(19):4700. https://doi.org/10.3390/rs15194700
Chicago/Turabian StyleMarchel, Łukasz, and Mariusz Specht. 2023. "Method for Determining Coastline Course Based on Low-Altitude Images Taken by a UAV" Remote Sensing 15, no. 19: 4700. https://doi.org/10.3390/rs15194700
APA StyleMarchel, Ł., & Specht, M. (2023). Method for Determining Coastline Course Based on Low-Altitude Images Taken by a UAV. Remote Sensing, 15(19), 4700. https://doi.org/10.3390/rs15194700