

Observability-Constrained Resampling-Free Cubature Kalman Filter for GNSS/INS with Measurement Outliers




Abstract
:1. Introduction
2. Preliminaries
2.1. Cubature Kalman Filter
2.2. Resampling-Free Sigma-Point Update Framework
2.3. Observability-Constrained Resampling-Free CKF
| Algorithm 1 The pseudocode of RCKF |
| Inputs: 1. Initialize , by (3), (4) and update based on CKF and (18) Time update: 2. Let , and calculate , by (5) and (6) 3. Calculate , and update by (16) Measurement update: 4. Calculate , and as 5. Update , by (10) and (11) 6. Calculate use (23) and return to Step 2 with Outputs: , , |
3. Methodology
| Algorithm 2 The pseudocode of ROCRCKF |
| Inputs: 1. Initialize based on CKF and update by (18) Time update: 2. Calculate ,, follow RCKF and propagate , Measurement update 3. Initialization: , , , , , For 4. Update as Gaussian distribution based on (30) Calculate by (31), and update , by (10)–(12) 5. Update as Bernoulli distribution based on (32) Calculate and update by (35) 6. Update as Beta distribution based on (36) Calculate , by (37) and (38) Calculate , by (39) and (40) 7. Update as Gamma distribution based on (41) Calculate , , and by (42)–(45) 8. Update as inverse Wishart distribution based on (46) Calculate , by (47), (48) and update by (49) End for 9. Update: , , , 10. Update by (23) and return to Step 2 with Outputs: , , , , |
4. Experiment Results and Analysis
4.1. Filter Model of the GNSS/INS
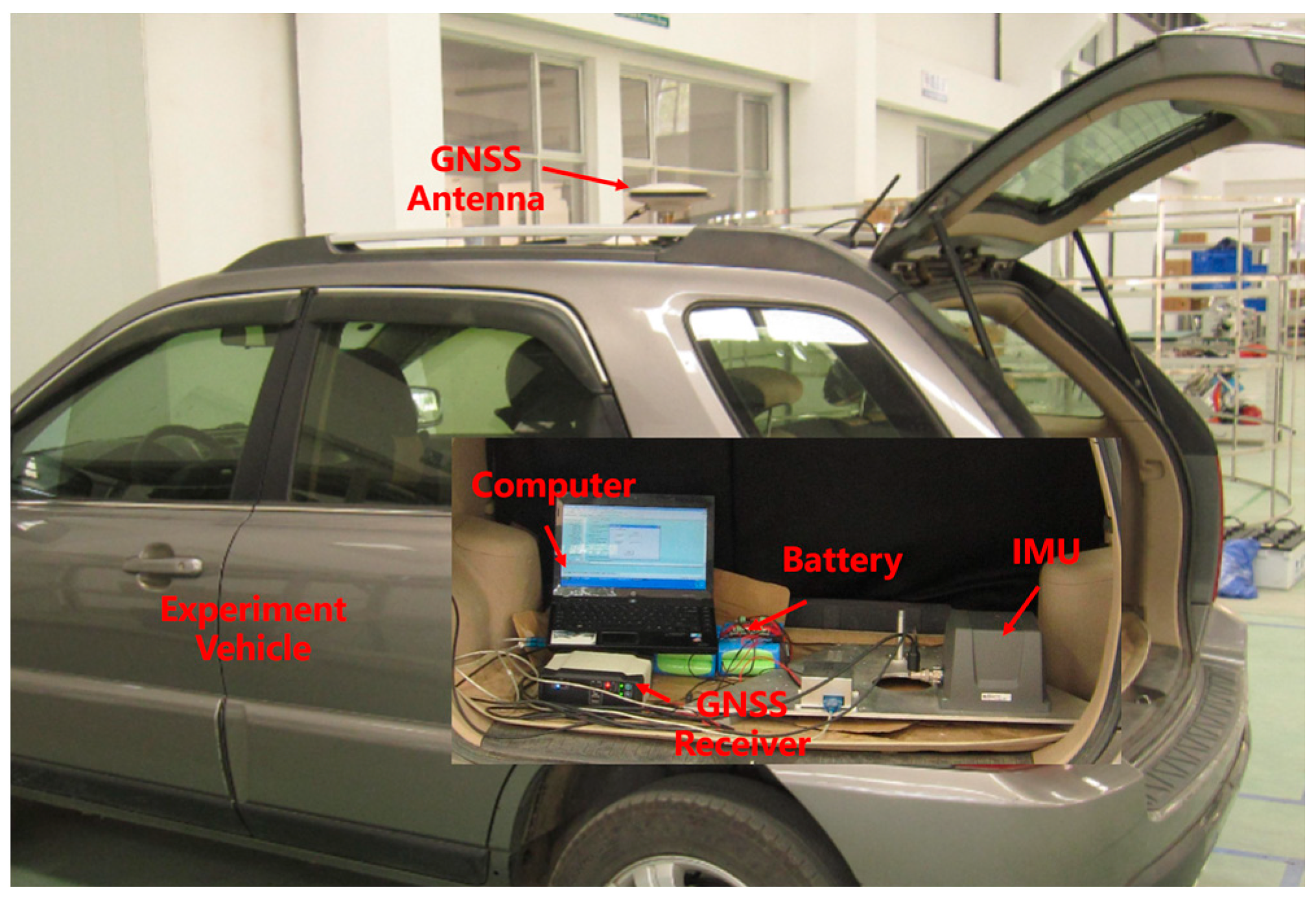
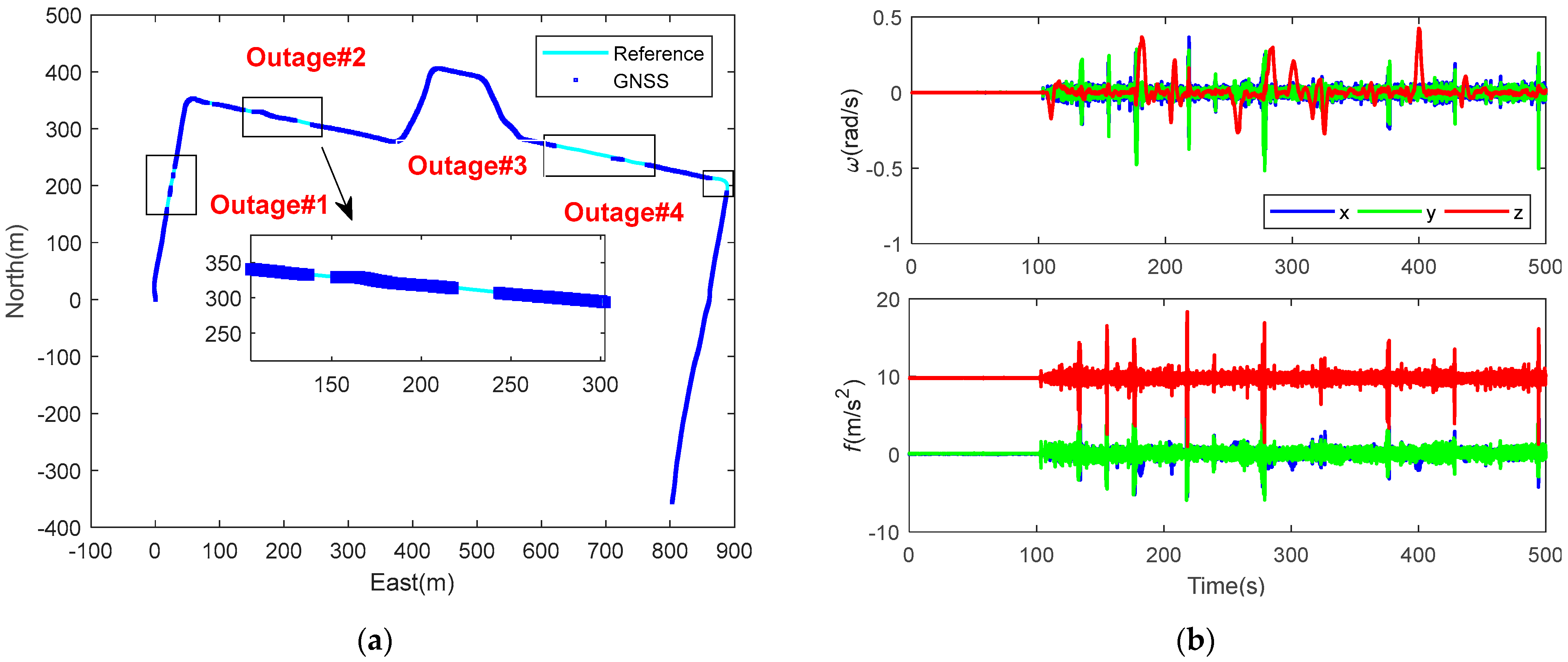
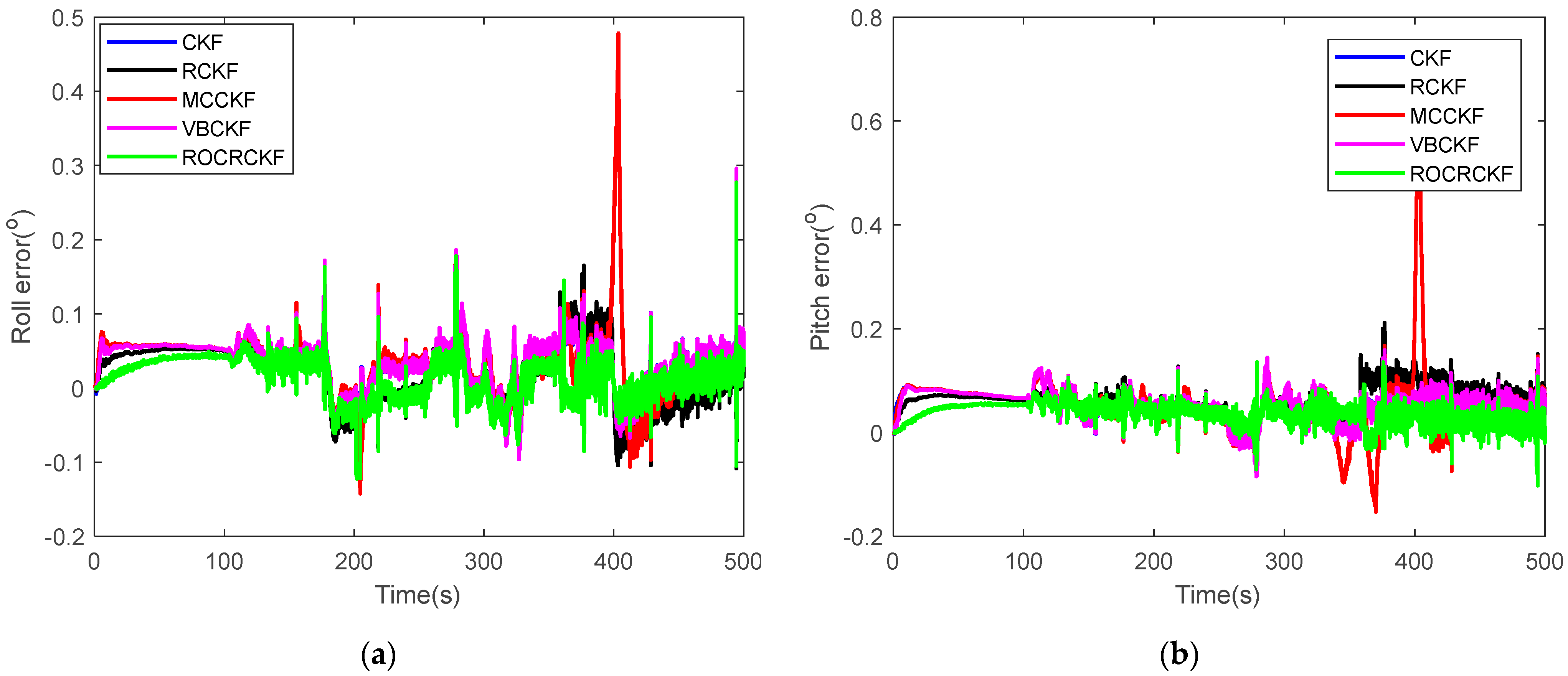
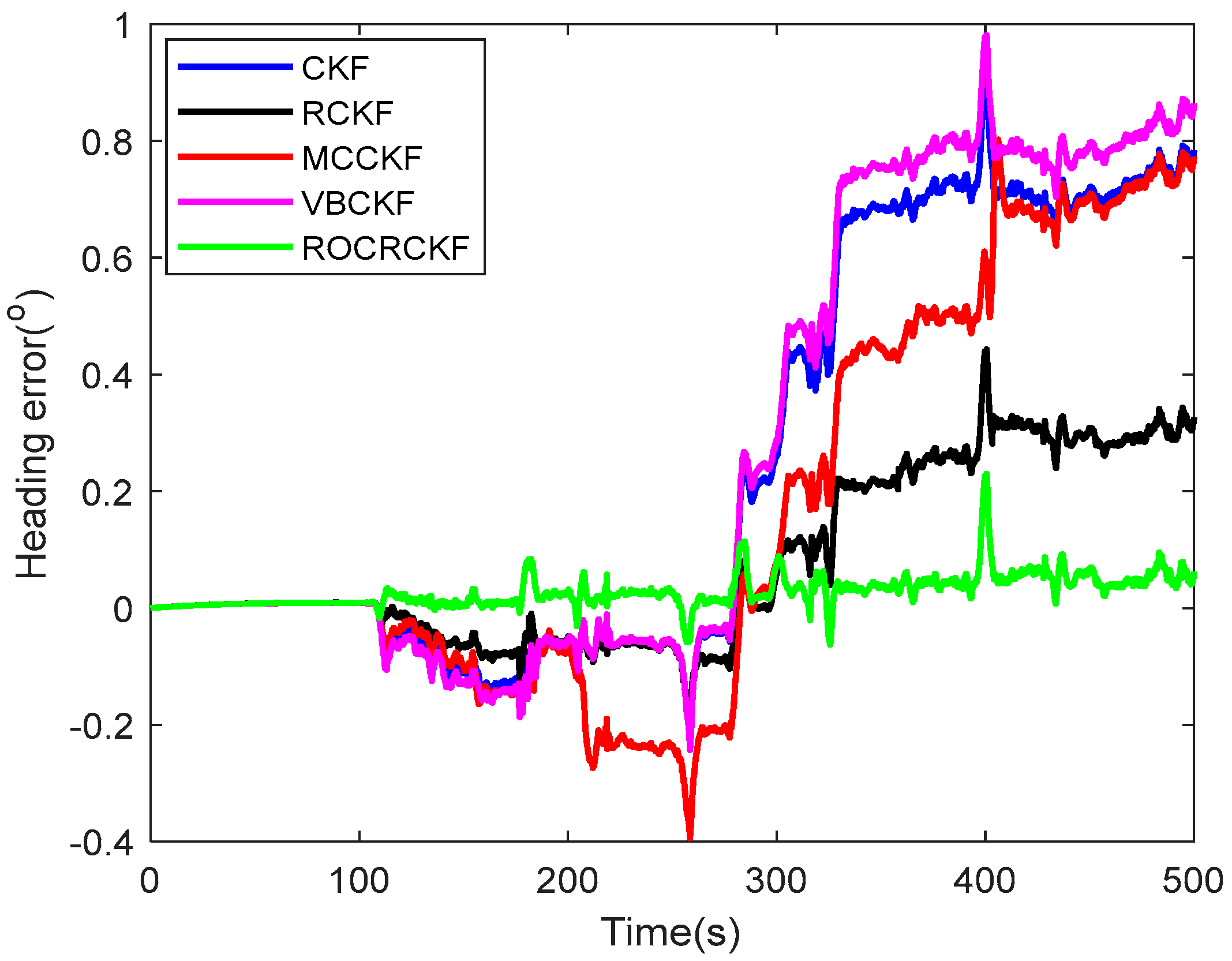
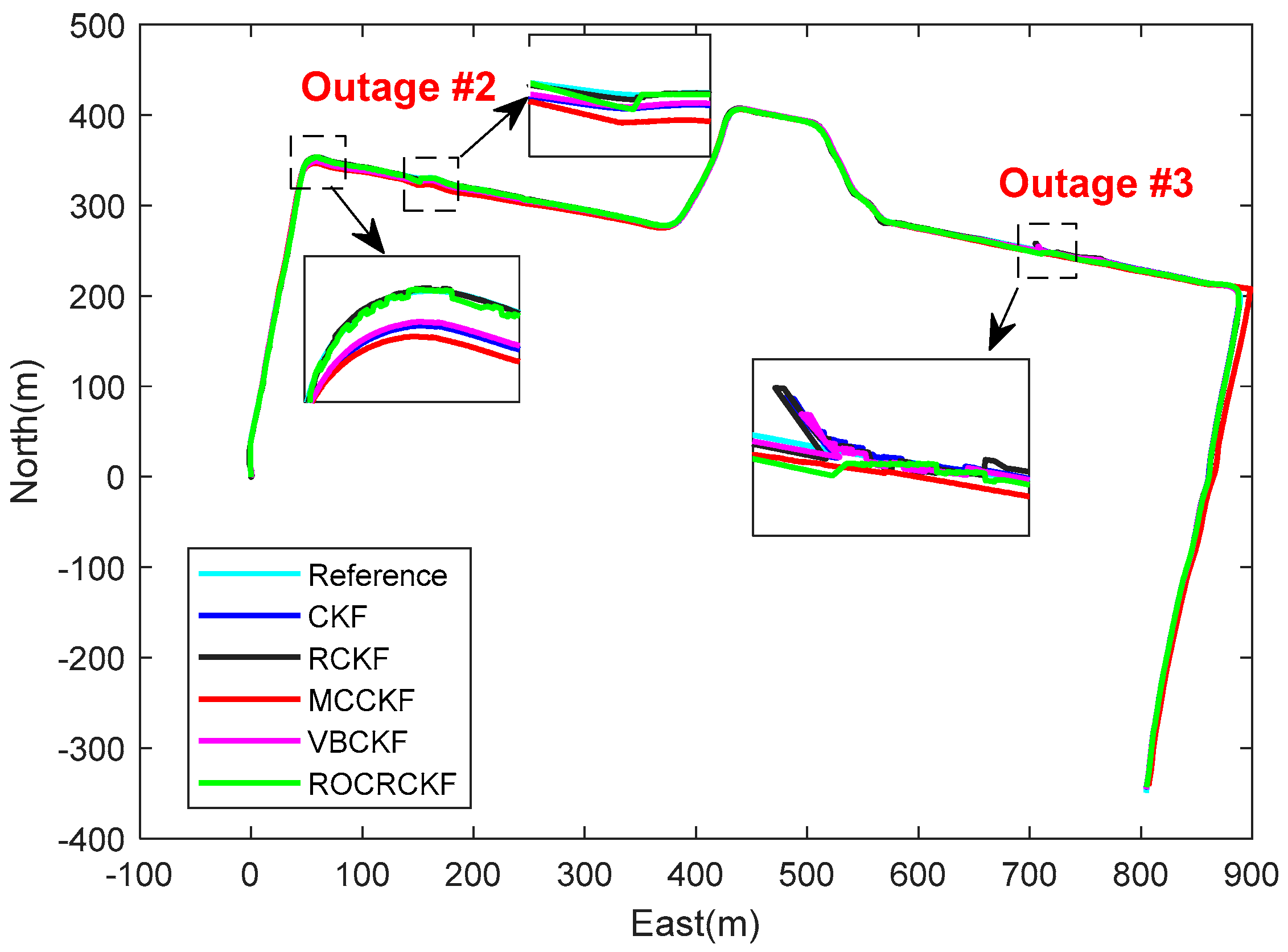
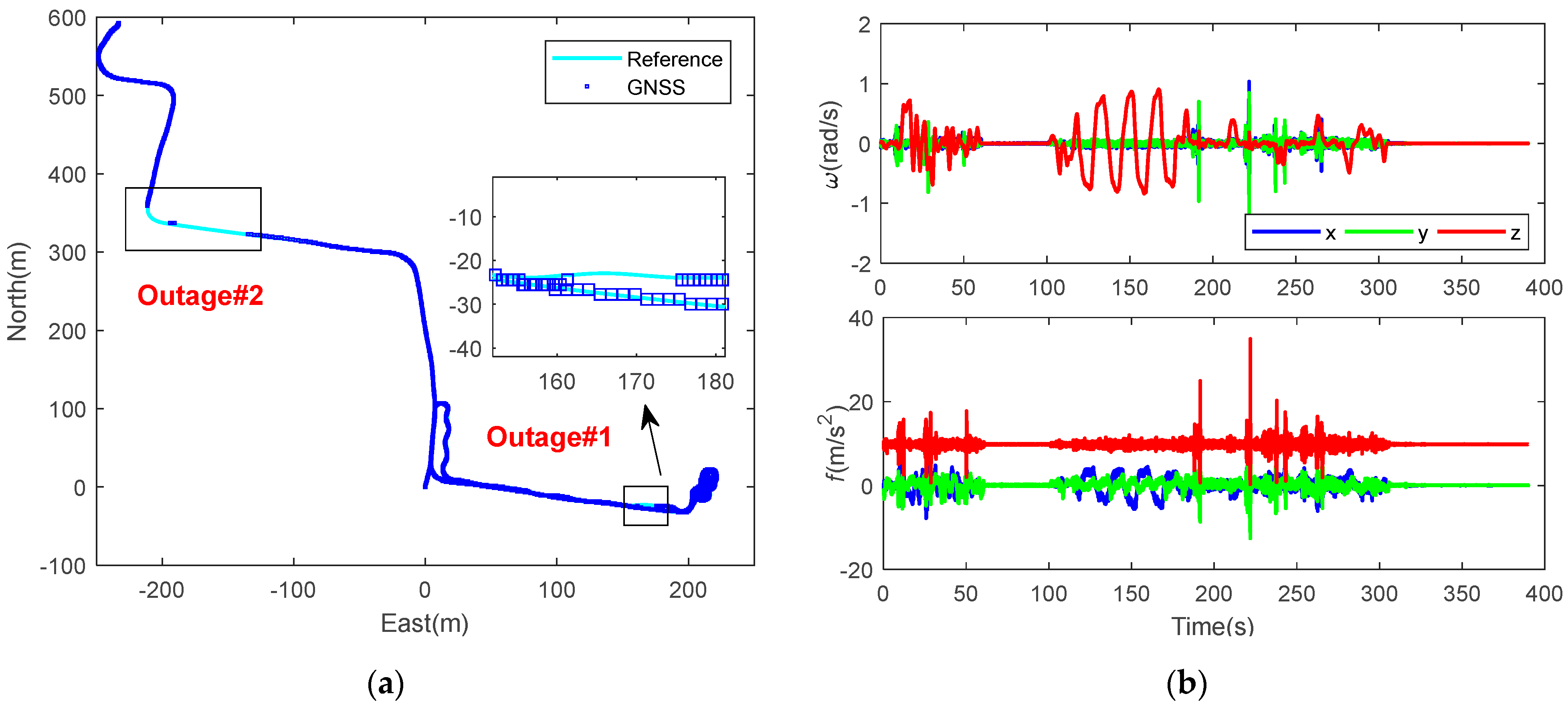
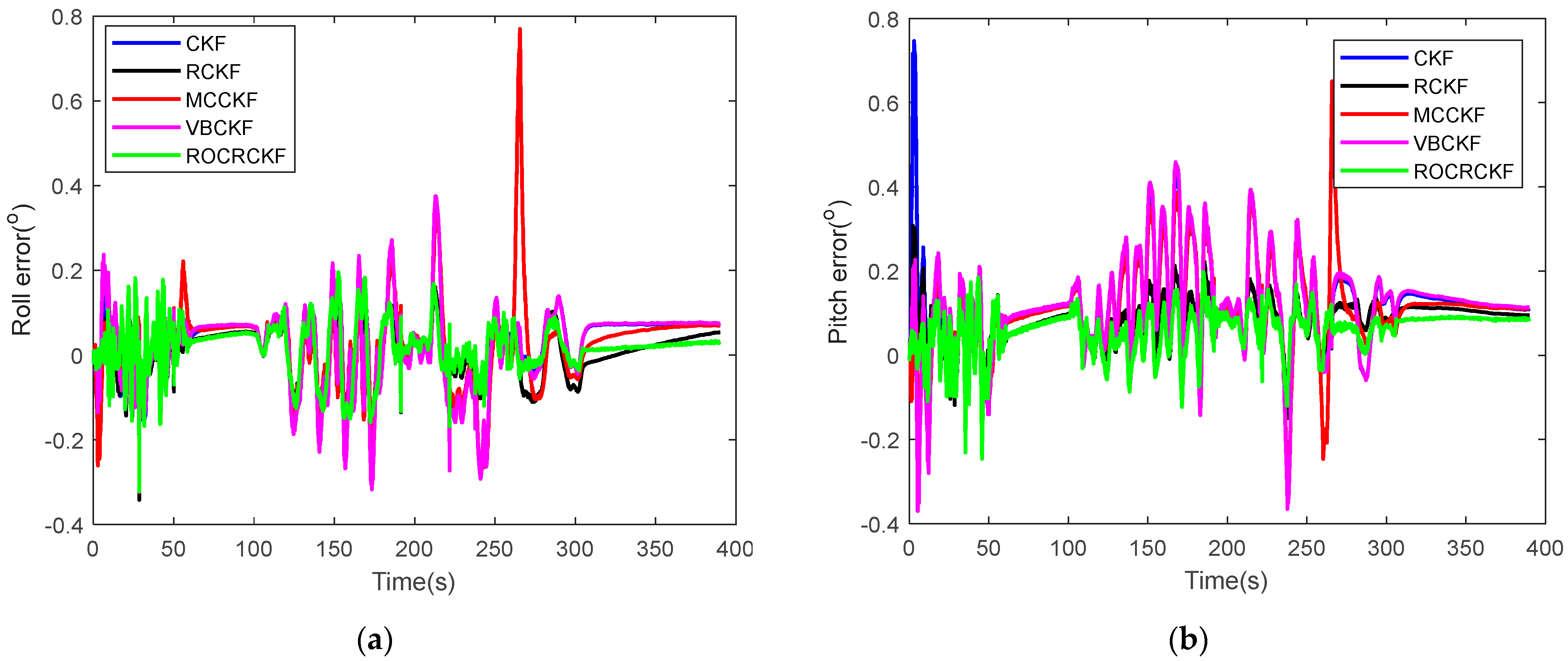
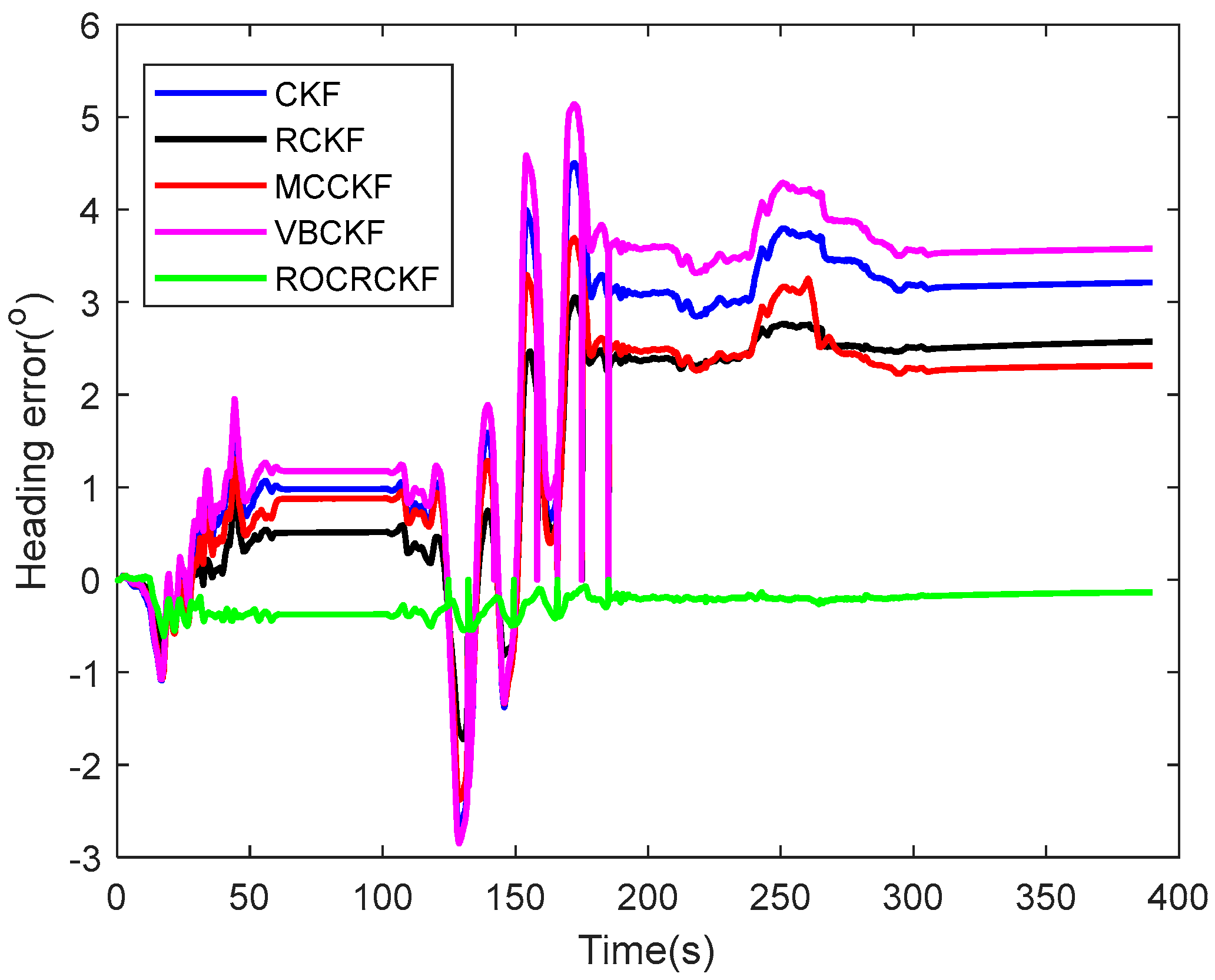
4.2. Experiment and Result Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Q.; Chen, Q.J.; Xu, Z.P.; Zhang, T.S.; Niu, X.J. Evaluating the navigation performance of multi-information integration based on low-end inertial sensors for precision. Precis. Agric. 2021, 22, 627–646. [Google Scholar] [CrossRef]
- Falco, G.; Nicola, M.; Pini, M. Positioning based on tightly coupled multiple sensors: A practical implementation and experimental assessment. IEEE Access 2018, 6, 13101–13116. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME D J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Schmidt, S.F. The Kalman filter: Its recognition and development for aerospace application. J. Guid. Control 1981, 4, 4–7. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlman, J.K.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimation. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K.Q. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Crassidis, J.L. Sigma-point Kalman filtering for integrated GPS and inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 750–756. [Google Scholar] [CrossRef]
- Zhao, Y.W. Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Process. 2016, 119, 67–79. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Liu, B.; Yu, S.S.; Shi, P. A stochastic event-triggered robust cubature Kalman filter filtering approach to power system dynamic state estimation with non-Gaussian measurement noise. IEEE Trans. Control Syst. Technol. 2023, 31, 889–896. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Schön, T.; Gustafsson, F.; Nordlund, P.-J. Marginalized particle filters for mixed linear/nonlinear state-space models. IEEE Trans. Signal Process. 2002, 53, 2279–2289. [Google Scholar] [CrossRef]
- Vouch, O.; Minetto, A.; Falco, G.; Dovis, F. On the adaptivity of unscented particle filter for GNSS/INS tightly-integrated navigation unit in urban environment. IEEE Access 2021, 9, 144157–144170. [Google Scholar] [CrossRef]
- Gao, G.L.; Gao, B.B.; Gao, S.S.; Hu, G.G.; Zhong, Y.M. A hypothesis test-constrained robust Kalman filter for INS/GNSS integration with abnormal measurement. IEEE Trans. Veh. Technol. 2023, 72, 1662–1673. [Google Scholar] [CrossRef]
- Hu, G.G.; Gao, B.B.; Zhong, Y.M.; Gu, C.F. Unscented Kalman filter with process noise covariance estimation for vehicular INS/GPS. Inf. Fusion 2020, 64, 194–204. [Google Scholar] [CrossRef]
- Gao, X.L.; Luo, H.Y.; Ning, B.K.; Zhao, F.; Bao, L.F.; Gong, Y.L.; Xiao, Y.M.; Jiang, J.G. RL-AKF adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles. Remote Sens. 2020, 12, 1704. [Google Scholar] [CrossRef]
- Xue, C.; Huang, Y.L.; Zhu, F.C.; Zhang, Y.G.; Chambers, J.A. An outlier-robust Kalman filter with adaptive selection of elliptically contoured distributions. IEEE Trans. Signal Process. 2022, 70, 994–1009. [Google Scholar] [CrossRef]
- Sun, J.; Ye, Q.Q.; Lei, Y. In-motion alignment method of SINS based on improved Kalman filter under geographic latitude uncertainty. Remote Sens. 2022, 14, 2581. [Google Scholar] [CrossRef]
- Särkkä, S.; Nummenmaa, A. Recursive adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans. Autom. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Cui, B.B.; Chen, X.Y.; Xu, Y.; Huang, H.Q.; Liu, X. Performance analysis of improved iterated cubature Kalman filter and its application to GNSS/INS. ISA Trans. 2017, 66, 460–468. [Google Scholar] [CrossRef]
- Huang, Y.L.; Zhang, Y.G.; Wu, Z.M.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef]
- Chang, L.B.; Li, K.L.; Hu, B.Q. Huber’s M-estimation-based process uncertainty robust filter for integrated INS/GPS. IEEE Sens. J. 2015, 15, 3367–3374. [Google Scholar] [CrossRef]
- Chen, B.D.; Liu, X.; Zhao, H.Q.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef]
- Liu, D.; Chen, X.Y.; Xu, Y.; Liu, X.; Shi, C.F. Maximum correntropy generalized high-degree cubature Kalman filter with application to the attitude determination system of missile. Aerosp. Sci. Technol. 2019, 95, 105441. [Google Scholar] [CrossRef]
- Shmaliy, Y.S. Linear optimal FIR estimation of discrete time-invariant state-space models. IEEE Trans. Signal Process. 2010, 58, 3086–3096. [Google Scholar] [CrossRef]
- Shmaliy, Y.S. Predictive tracking under persistent disturbances and data error using H2 FIR approach. IEEE Trans. Ind. Electron. 2022, 69, 6121–6129. [Google Scholar] [CrossRef]
- Nurminen, H.; Ardeshiri, T.; Piché, R.; Gustafsson, F. Skew-t filter and smoother with improved covariance matrix approximation. IEEE Trans. Signal Process. 2018, 66, 5618–5633. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, G.R.; Li, Y.F.; Leung, H. A novel robust Kalman filter with unknown non-stationary heavy-tailed noise. Automatica 2021, 127, 109511. [Google Scholar] [CrossRef]
- Huang, Y.L.; Zhang, Y.G.; Zhao, Y.; Chambers, J.A. A novel robust Gaussian-Student’s t mixture distribution based Kalman filter. IEEE Trans. Signal Process. 2019, 67, 3606–3620. [Google Scholar] [CrossRef]
- Fu, H.P.; Huang, W.; Li, Z.W.; Cheng, Y.M.; Zhang, T.Y. Robust cubature Kalman filter with Gaussian-multivariate Laplacian mixture distribution and partial variational Bayesian method. IEEE Trans. Signal Process. 2023, 71, 847–858. [Google Scholar] [CrossRef]
- Cui, B.B.; Chen, X.Y.; Tang, X.H. Improved cubature Kalman filter for GNSS/INS based on transformation of posterior sigma-points error. IEEE Trans. Signal Process. 2017, 65, 2975–2987. [Google Scholar] [CrossRef]
- Wang, M.S.; Wu, W.Q.; Zhou, P.Y.; He, X.F. State transformation extended Kalman filter for GPS/SINS tightly coupled integration. GPS Solut. 2018, 22, 112. [Google Scholar] [CrossRef]
- Yang, Y.L.; Huang, G.Q. Observalility analysis of aided INS with heterogeneous features of points, lines, and planes. IEEE Trans. Robot. 2019, 35, 1399–1418. [Google Scholar] [CrossRef]
- Cui, B.B.; Wei, X.H.; Chen, X.Y.; Li, J.Y.; Wang, A.C. Robust cubature Kalman filter based on variational Bayesian and transformed posterior sigma points error. ISA Trans. 2019, 86, 18–28. [Google Scholar] [CrossRef]
- Wang, G.W.; Cui, B.B.; Tang, C.Y. Robust cubature Kalman filter based on maximum correntropy and resampling-free sigma-point update framework. Digital Signal Process. 2022, 126, 103495. [Google Scholar] [CrossRef]
- Wang, H.W.; Li, H.B.; Fang, J.; Wang, H.P. Robust Gaussian Kalman filter with outlier detection. IEEE Signal Process. 2018, 25, 1236–1240. [Google Scholar] [CrossRef]
- Li, H.Q.; Medina, D.; Vilà-Valls, J.; Closas, P. Robust variational-based Kalman filter for outlier rejection with correlated measurement. IEEE Trans. Signal Process. 2021, 69, 357–369. [Google Scholar] [CrossRef]
- Straka, O.; Dunik, J. Resampling-free stochastic integration filter. In Proceedings of the IEEE 23rd International Conference on Information Fusion (FUSION), Sun City, South Africa, 6–9 July 2020. [Google Scholar]
- Groves, P.D. Principles of GNSS, Intertial, and Multisensory Integrated Navigation Systems, 2nd ed.; Artech House: Boston, MA, USA, 2008; pp. 382–393. [Google Scholar]
- Hong, S.; Lee, M.H.; Chun, H.H.; Kwon, S.H.; Speyer, J.L. Observability of error states in GPS/INS integration. IEEE Trans. Veh. Technol. 2005, 54, 731–743. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Characteristic | Value |
|---|---|---|
| Gyroscope | Rate bias | 1 deg/h |
| Rate scale factor | 100 ppm | |
| Angular random walk | 0.07 deg/ | |
| Accelerometer | Bias | 0.3 mg |
| Scale factor | 300 ppm |
| Method | Roll (°) | Pitch (°) | Heading (°) | ARMSEpos (m) |
|---|---|---|---|---|
| CKF | 0.045 | 0.059 | 0.44 | 2.61 |
| RCKF | 0.045 | 0.065 | 0.17 | 2.50 |
| MCCKF | 0.059 | 0.080 | 0.38 | 5.48 |
| VBCKF | 0.046 | 0.059 | 0.48 | 2.53 |
| ROCRCKF | 0.030 | 0.041 | 0.04 | 2.55 |
| Method | Roll (°) | Pitch (°) | Heading (°) | ARMSEpos (m) |
|---|---|---|---|---|
| CKF | 0.091 | 0.16 | 2.60 | 7.30 |
| RCKF | 0.057 | 0.10 | 1.96 | 6.38 |
| MCCKF | 0.105 | 0.15 | 2.00 | 6.18 |
| VBCKF | 0.097 | 0.16 | 2.94 | 7.13 |
| ROCRCKF | 0.058 | 0.08 | 0.27 | 5.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, B.; Chen, W.; Weng, D.; Wei, X.; Sun, Z.; Zhao, Y.; Liu, Y. Observability-Constrained Resampling-Free Cubature Kalman Filter for GNSS/INS with Measurement Outliers. Remote Sens. 2023, 15, 4591. https://doi.org/10.3390/rs15184591
Cui B, Chen W, Weng D, Wei X, Sun Z, Zhao Y, Liu Y. Observability-Constrained Resampling-Free Cubature Kalman Filter for GNSS/INS with Measurement Outliers. Remote Sensing. 2023; 15(18):4591. https://doi.org/10.3390/rs15184591
Chicago/Turabian StyleCui, Bingbo, Wu Chen, Duojie Weng, Xinhua Wei, Zeyu Sun, Yan Zhao, and Yufei Liu. 2023. "Observability-Constrained Resampling-Free Cubature Kalman Filter for GNSS/INS with Measurement Outliers" Remote Sensing 15, no. 18: 4591. https://doi.org/10.3390/rs15184591
APA StyleCui, B., Chen, W., Weng, D., Wei, X., Sun, Z., Zhao, Y., & Liu, Y. (2023). Observability-Constrained Resampling-Free Cubature Kalman Filter for GNSS/INS with Measurement Outliers. Remote Sensing, 15(18), 4591. https://doi.org/10.3390/rs15184591