
Deep Learning Investigation of Mercury’s Explosive Volcanism


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Set
2.2. Data Preparation
2.3. Deep Learning Architecture
3. Implementation of the Deep Neural Network
3.1. Selection of the Input Size
3.2. Selection of the Output Size
3.3. Training and Performance Evaluation
4. Results
4.1. Cluster Maps of Pyroclastic Deposits
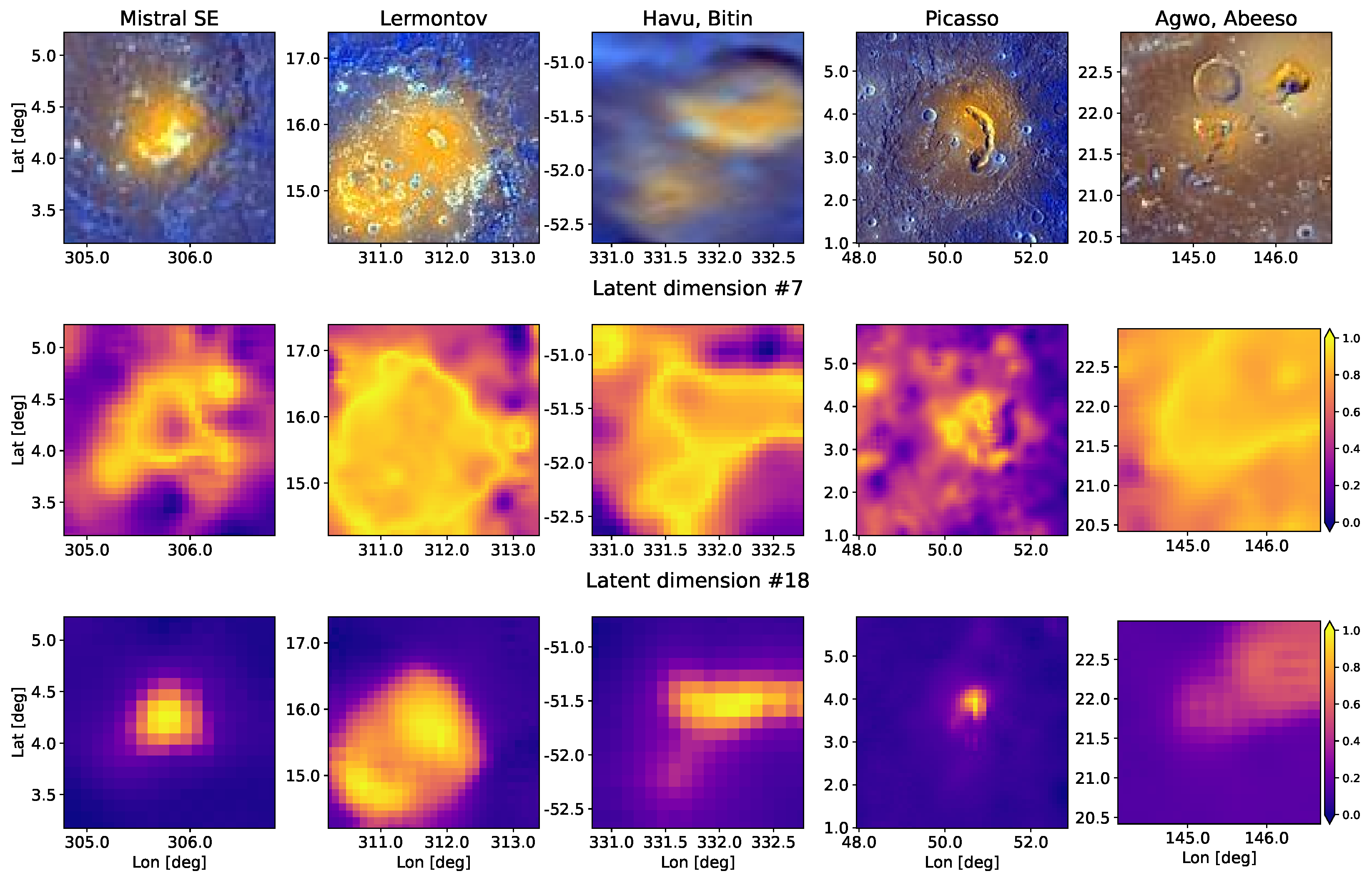
4.2. Feature Extraction
4.3. Pyroclastic Deposit Area
5. Discussion
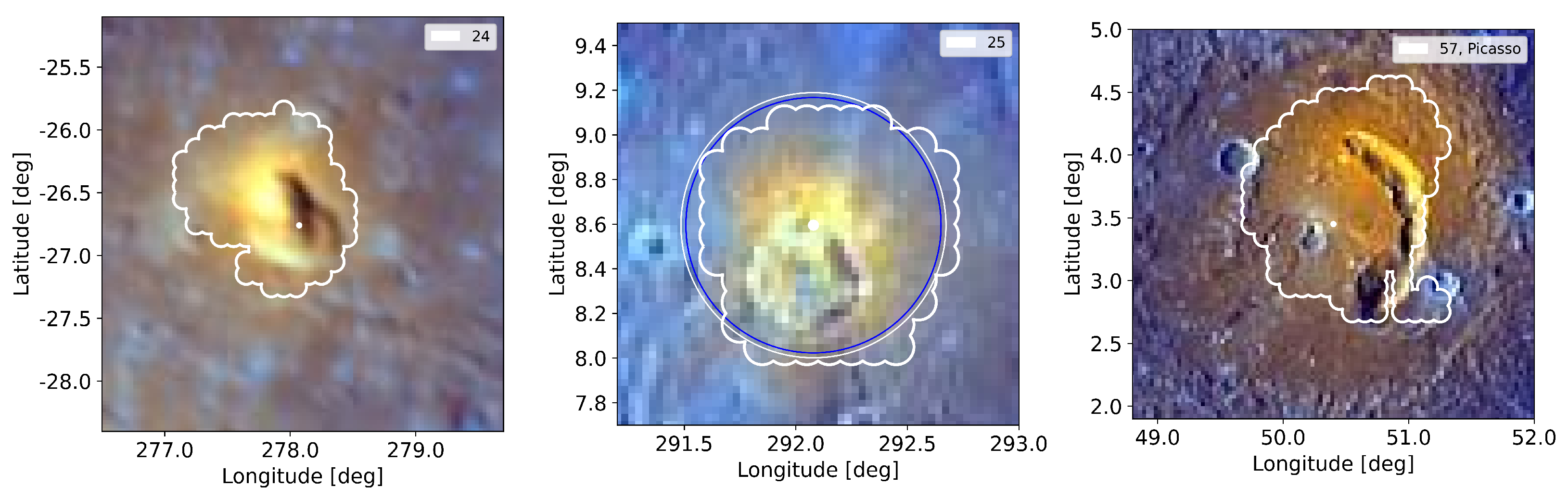
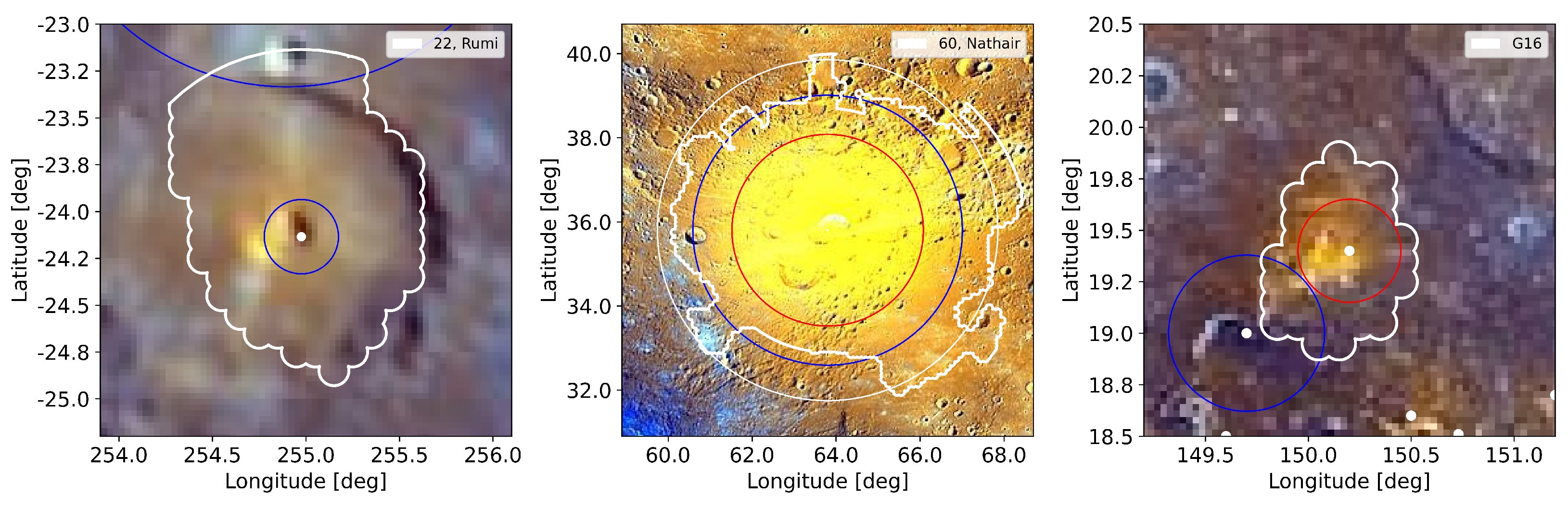
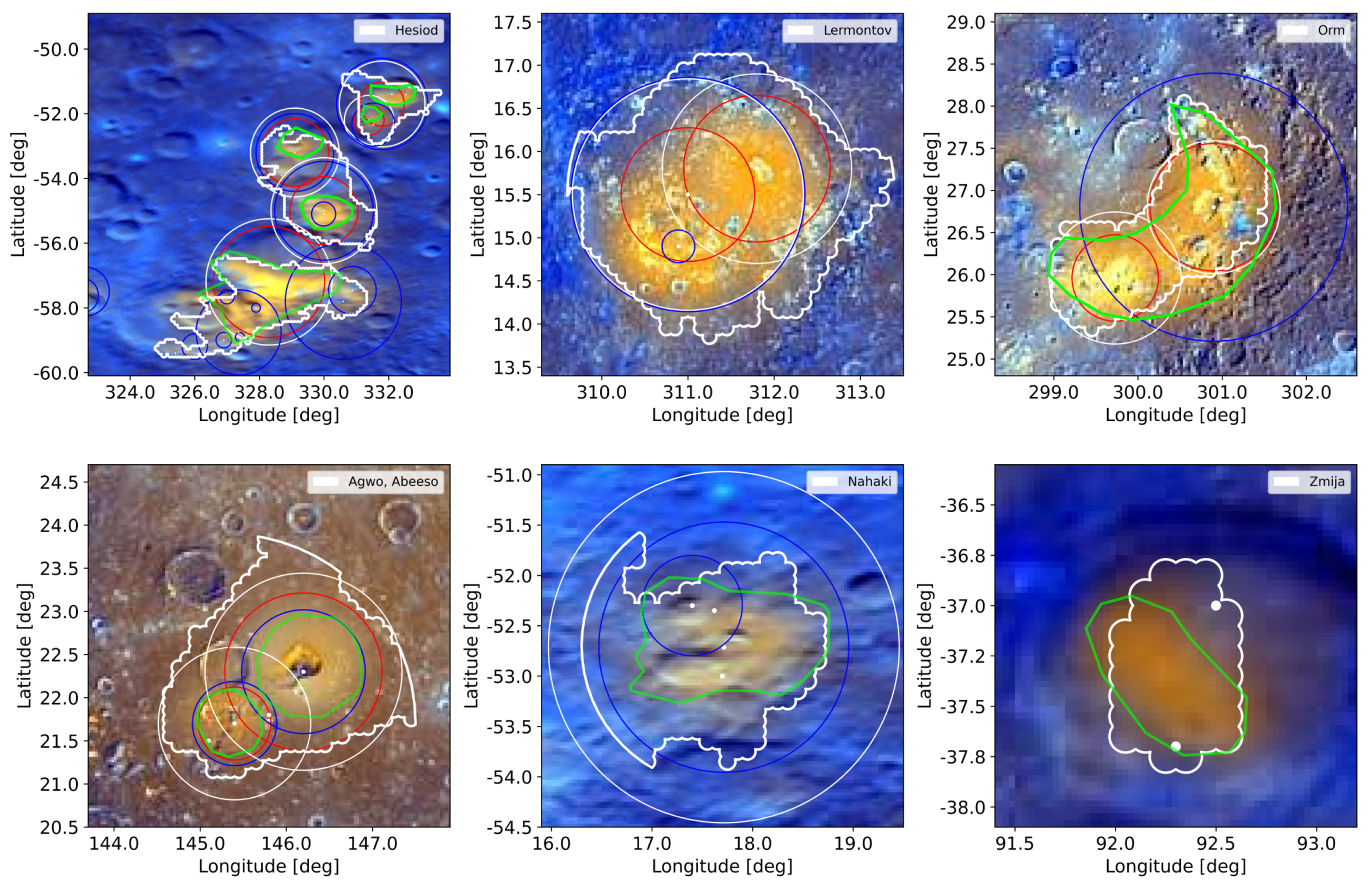
5.1. Evaluation of the Deposit Extent
5.2. Methodology Limitations
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Head, J.W.; Murchie, S.L.; Prockter, L.M.; Robinson, M.S.; Solomon, S.C.; Strom, R.G.; Chapman, C.R.; Watters, T.R.; McClintock, W.E.; Blewett, D.T.; et al. Volcanism on Mercury: Evidence from the First MESSENGER Flyby. Science 2008, 321, 69–72. [Google Scholar] [CrossRef]
- Kerber, L.; Head, J.W.; Solomon, S.C.; Murchie, S.L.; Blewett, D.T.; Wilson, L. Explosive volcanic eruptions on Mercury: Eruption conditions, magma volatile content, and implications for interior volatile abundances. Earth Planet. Sci. Lett. 2009, 285, 263–271. [Google Scholar] [CrossRef]
- McClintock, W.E.; Izenberg, N.R.; Holsclaw, G.M.; Blewett, D.T.; Domingue, D.L.; Head, J.W.; Helbert, J.; McCoy, T.J.; Murchie, S.L.; Robinson, M.S.; et al. Spectroscopic Observations of Mercury’s Surface Reflectance During MESSENGER’s First Mercury Flyby. Science 2008, 321, 62–65. [Google Scholar] [CrossRef]
- Izenberg, N.R.; Klima, R.L.; Murchie, S.L.; Blewett, D.T.; Holsclaw, G.M.; McClintock, W.E.; Malaret, E.; Mauceri, C.; Vilas, F.; Sprague, A.L.; et al. The low-iron, reduced surface of Mercury as seen in spectral reflectance by MESSENGER. Icarus 2014, 228, 364–374. [Google Scholar] [CrossRef]
- Goudge, T.A.; Head, J.W.; Kerber, L.; Blewett, D.T.; Denevi, B.W.; Domingue, D.L.; Gillis-Davis, J.J.; Gwinner, K.; Helbert, J.; Holsclaw, G.M.; et al. Global inventory and characterization of pyroclastic deposits on Mercury: New insights into pyroclastic activity from MESSENGER orbital data. J. Geophys. Res. Planets 2014, 119, 635–658. [Google Scholar] [CrossRef]
- Murchie, S.L.; Klima, R.L.; Denevi, B.W.; Ernst, C.M.; Keller, M.R.; Domingue, D.L.; Blewett, D.T.; Chabot, N.L.; Hash, C.D.; Malaret, E.; et al. Orbital multispectral mapping of Mercury with the MESSENGER Mercury Dual Imaging System: Evidence for the origins of plains units and low-reflectance material. Icarus 2015, 254, 287–305. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Ghamisi, P.; Yokoya, N.; Li, J.; Liao, W.; Liu, S.; Plaza, J.; Rasti, B.; Plaza, A. Advances in Hyperspectral Image and Signal Processing: A Comprehensive Overview of the State of the Art. IEEE Geosci. Remote Sens. Mag. 2017, 5, 37–78. [Google Scholar] [CrossRef]
- Audebert, N.; Saux, B.L.; Lefevre, S. Deep Learning for Classification of Hyperspectral Data: A Comparative Review. IEEE Geosci. Remote Sens. Mag. 2019, 7, 159–173. [Google Scholar] [CrossRef]
- Signoroni, A.; Savardi, M.; Baronio, A.; Benini, S. Deep Learning Meets Hyperspectral Image Analysis: A Multidisciplinary Review. J. Imaging 2019, 5, 52. [Google Scholar] [CrossRef] [PubMed]
- D’Amore, M.; Padovan, S. Automated surface mapping via unsupervised learning and classification of Mercury Visible–Near-Infrared reflectance spectra. In Machine Learning for Planetary Science; Helbert, J., D’Amore, M., Aye, M., Kerner, H., Eds.; Elsevier: Amsterdam, The Netherlands, 2022; Chapter 7; pp. 131–149. [Google Scholar] [CrossRef]
- Thomas, R.; Rothery, D.A.; Conway, S.; Anand, M. Mechanisms of explosive volcanism on Mercury: Implications from its global distribution and morphology. J. Geophys. Res. Planets 2014, 119, 2239–2254. [Google Scholar] [CrossRef]
- Kerber, L.; Head, J.W.; Blewett, D.T.; Solomon, S.C.; Wilson, L.; Murchie, S.L.; Robinson, M.S.; Denevi, B.W.; Domingue, D.L. The global distribution of pyroclastic deposits on Mercury: The view from MESSENGER flybys 1–3. Planet. Space Sci. 2011, 59, 1895–1909. [Google Scholar] [CrossRef]
- Barraud, O.; Besse, S.; Doressoundiram, A.; Cornet, T.; Muñoz, C. Spectral investigation of Mercury’s pits’ surroundings: Constraints on the planet’s explosive activity. Icarus 2021, 370, 114652. [Google Scholar] [CrossRef]
- Besse, S.; Doressoundiram, A.; Benkhoff, J. Spectroscopic properties of explosive volcanism within the Caloris basin with MESSENGER observations. J. Geophys. Res. Planets 2015, 120, 2102–2117. [Google Scholar] [CrossRef]
- Jozwiak, L.M.; Head, J.W.; Wilson, L. Explosive volcanism on Mercury: Analysis of vent and deposit morphology and modes of eruption. Icarus 2018, 302, 191–212. [Google Scholar] [CrossRef]
- Besse, S.; Doressoundiram, A.; Barraud, O.; Griton, L.; Cornet, T.; Muñoz, C.; Varatharajan, I.; Helbert, J. Spectral Properties and Physical Extent of Pyroclastic Deposits on Mercury: Variability Within Selected Deposits and Implications for Explosive Volcanism. J. Geophys. Res. Planets 2020, 125, e2018JE005879. [Google Scholar] [CrossRef]
- Pegg, D.; Rothery, D.; Balme, M.; Conway, S. Explosive vent sites on Mercury: Commonplace multiple eruptions and their implications. Icarus 2021, 365, 114510. [Google Scholar] [CrossRef]
- Romero, A.; Gatta, C.; Camps-Valls, G. Unsupervised Deep Feature Extraction for Remote Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1349–1362. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, Z.; Zhao, X.; Wang, G.; Gu, Y. Deep Learning-Based Classification of Hyperspectral Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2094–2107. [Google Scholar] [CrossRef]
- Tao, C.; Pan, H.; Li, Y.; Zou, Z. Unsupervised Spectral–Spatial Feature Learning With Stacked Sparse Autoencoder for Hyperspectral Imagery Classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2438–2442. [Google Scholar] [CrossRef]
- Mei, S.; Ji, J.; Geng, Y.; Zhang, Z.; Li, X.; Du, Q. Unsupervised Spatial–Spectral Feature Learning by 3D Convolutional Autoencoder for Hyperspectral Classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6808–6820. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Shen, Q. Spectral–Spatial Classification of Hyperspectral Imagery with 3D Convolutional Neural Network. Remote Sens. 2017, 9, 67. [Google Scholar] [CrossRef]
- Guo, X.; Liu, X.; Zhu, E.; Yin, J. Deep Clustering with Convolutional Autoencoders. In Proceedings of the Neural Information Processing: 24th International Conference, ICONIP 2017, Guangzhou, China, 14–18 November 2017; Liu, D., Xie, S., Li, Y., Zhao, D., El-Alfy, E.S.M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 373–382. [Google Scholar] [CrossRef]
- McClintock, W.E.; Lankton, M.R. The Mercury Atmospheric and Surface Composition Spectrometer for the MESSENGER Mission. Space Sci. Rev. 2007, 131, 481–521. [Google Scholar] [CrossRef]
- Besse, S.; Munoz, C.; Cornet, T.; Doressoundiram, A.; Barraud, O.; Caminiti, E.; Leon-Dasi, M.; Izenberg, N. Updating the Mercury Mean Spectra using 4.7 millions MASCS Spectra. In Proceedings of the European Planetary Science Congress, Granada, Spain, 18–23 September 2022; p. EPSC2022–1026. [Google Scholar] [CrossRef]
- Wu, Y.H.E.; Hung, M.C. Comparison of Spatial Interpolation Techniques Using Visualization and Quantitative Assessment. In Applications of Spatial Statistics; Hung, M.C., Ed.; IntechOpen: Rijeka, Croatia, 2016; Chapter 2. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957; pp. 83–87. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Zhao, M.; Shi, S.; Chen, J.; Dobigeon, N. A 3D-CNN Framework for Hyperspectral Unmixing with Spectral Variability. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Jawin, E.R.; Besse, S.; Gaddis, L.R.; Sunshine, J.M.; Head, J.W.; Mazrouei, S. Examining spectral variations in localized lunar dark mantle deposits. J. Geophys. Res. Planets 2015, 120, 1310–1331. [Google Scholar] [CrossRef]
- Galiano, A.; Capaccioni, F.; Filacchione, G.; Carli, C. Spectral identification of pyroclastic deposits on Mercury with MASCS/MESSENGER data. Icarus 2022, 388, 115233. [Google Scholar] [CrossRef]
- Barraud, O.; Doressoundiram, A.; Besse, S.; Sunshine, J.M. Near-Ultraviolet to Near-Infrared Spectral Properties of Hollows on Mercury: Implications for Origin and Formation Process. J. Geophys. Res. Planets 2020, 125, e2020JE006497. [Google Scholar] [CrossRef]
- Pieters, C.M.; Noble, S.K. Space weathering on airless bodies. J. Geophys. Res. Planets 2016, 121, 1865–1884. [Google Scholar] [CrossRef]
- Wilson, L. Relationships between pressure, volatile content and ejecta velocity in three types of volcanic explosion. J. Volcanol. Geotherm. Res. 1980, 8, 297–313. [Google Scholar] [CrossRef]
- Leon-Dasi, M.; Besse, S.; Doressoundiram, A. Shapefile Definition of the Pyroclastic Deposit Extent. 2023. Available online: https://zenodo.org/record/8200052 (accessed on 31 July 2023).
- Benkhoff, J.; van Casteren, J.; Hayakawa, H.; Fujimoto, M.; Laakso, H.; Novara, M.; Ferri, P.; Middleton, H.R.; Ziethe, R. BepiColombo—Comprehensive exploration of Mercury: Mission overview and science goals. Planet. Space Sci. 2010, 58, 2–20. [Google Scholar] [CrossRef]
- Cremonese, G.; Capaccioni, F.; Capria, M.; Doressoundiram, A.; Palumbo, P.; Vincendon, M.; Massironi, M.; Debei, S.; Zusi, M.; Altieri, F.; et al. SIMBIO-SYS: Scientific Cameras and Spectrometer for the BepiColombo Mission. Space Sci. Rev. 2020, 216, 75. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Range Studied | Final Configuration |
|---|---|---|
| Patch Size | 5–15 | 5 |
| Latent dimension | 9–80 | 20 |
| Number of filters | 16–24 | 16 |
| Number of layers | 2 | 2 |
| Learning rate | 0.01 | 0.01 |
| Weight decay | 0.005 | 0.005 |
| Test/Train ratio | 0.8/0.2 | 0.8/0.2 |
| Number of clusters | 4–15 | 8 |
| Dimension | 1 | 2 | 3 | 4 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (nm) | 1360 | 785 | 1060 | 765 | 1290 | 1210 | 725 | 1180 | 770 | 770 | 775 | 1050 | 1070 | 1210 | 1210 |
| Correlation | 0.92 | 0.96 | 0.95 | 0.96 | 0.93 | 0.95 | 0.93 | 0.95 | 0.92 | 0.96 | 0.96 | 0.95 | 0.93 | 0.95 | 0.96 |
| Parameter | VIS Slope | NIR Slope | Curvature | UV Downturn | UV Slope | UV/VIS Slope Break | VIS/NIR Slope Break |
|---|---|---|---|---|---|---|---|
| Correlation | 0.8 | 0.58 | 0.75 | 0.18 | 0.92 | 0.6 | 0.76 |
| Dimension | 11 | 1 | 8 | 11 | 4 | 4 | 9 |
| ID | Equivalent Vent ID | Host Crater/Facula Name | Lon (deg) | Lat (deg) | Deposit Area (km) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Barraud et al. [14] | Kerber et al. [13] | Goudge et al. [5] | Thomas et al. [12] | This Work | |||||
| 2 | J2, G11 | Brooks | −167.6 | −45.04 | 484 | 153 | |||
| 6 | J6, G7 | Tolstoj | −161.14 | −19.88 | 512 | 326 | |||
| 13 | J13 | −137.79 | 4.43584 | 1020 | |||||
| 15 | J15, B15 | −136.79 | −3.54 | 11,310 | 23,181 | 7721 | |||
| 16 | J16 | −135.49 | −8.41 | 790 | |||||
| 17 | J17 | −129.99 | −13.53 | 849 | |||||
| 19 | J19, K29, B17 | Glinka | −112.4 | 14.9 | 1963 | 846 | 1730.98 | 2398 | |
| 20 | J20, K10 | To Ngoc Van | −111.8 | 52.6 | 2924 | 532.02 | 2907 | ||
| 22 | J22 | Rumi | −105.024 | −24.13 | 186.4 | 2712 | |||
| 23 | J23 | Matisse | −89.21 | −21.22 | 163.1 | 3407 | |||
| 24 | J24 | −81.93 | −26.76 | 2272 | |||||
| 25 | J25, B18 | −67.92 | 8.59 | 1963 | 1820.98 | 1994 | |||
| 26 | J26, K26 | Catullus | −67.5 | 22 | 921 | 1648.26 | 2490 | ||
| 27 | J27, K33, B1 | Veronese | −55.8 | 5.4 | 1963 | 421 | 2847.89 | 2662 | |
| 32 | J32, K22, B27 | Enheduanna | −33.7 | 48.4 | 3848 | 1111 | 1875.55 | 818 | |
| 33 | J33 | Namarjira | −32.9 | 58.8 | 1352 | 292 | |||
| 37 | J37, K16, B21 | Geddes | −29.5 | 27.2 | 2827 | 1654 | 2331.53 | 953 | |
| 54 | J54 | 24.41 | −51.66 | 1961.56 | 1193 | ||||
| 57 | J57, K37 | Picasso | 50.4 | 3.45 | 4323 | ||||
| 60 | J60, K1, B8 | Nathair | 63.8 | 35.8 | 61,575 | 19,466 | 38,589.11 | 51,760 | |
| 61 | J61 | 65.74 | −15.56 | 1836 | |||||
| 110 | P18 | −4.1 | 26 | 298 | |||||
| 142 | P82 | 54.9 | −11.2 | 1361 | |||||
| 146 | P92 | 62.4 | −11.5 | 744 | |||||
| 148 | P101 | 51.8 | −8.3 | 738.98 | 1649 | ||||
| 184 | P162 | 144.8 | −59.4 | 333 | |||||
| 187 | P166 | 110.4 | 58.8 | 176 | |||||
| 190 | P169 | 121.1 | 60.1 | 3088.54 | 239 | ||||
| 193 | P184 | 144.8 | −64.5 | 1117 | |||||
| 237 | P290 | Matisse | −90.2 | −22.7 | 6362 | 4214.96 | 6895 | ||
| 240 | P198 | Hesiod | −34.6 | −59.4 | 194 | ||||
| 252 | P347 | Mussorgskij | −97.6 | 33.1 | 710 | ||||
| 278 | P402 | Zmija | 92.3 | −37.7 | 655 | ||||
| 327 | T5014 | Neruda | 125.65 | −52.56 | 5027 | 2705 | |||
| 369 | T6125 | −56.09 | 3.76 | 89.9 | 90 | ||||
| Group ID | Vent IDs | Host Crater/Facula Name | Lon (deg) | Lat (deg) | Deposit Area (km) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Barraud et al. [14] | Kerber et al. [13] | Goudge et al. [5] | Thomas et al. [12] | This Work | |||||
| G2 | 282, 283, 261, 131, 260, 391 | 22.75 | 36.3 | 1731 | 1109 | ||||
| G3 | 50, 150, 151, 328 | Nahaki | 17.71 | −52.71 | 6362 | 3230 | 2475 | ||
| G9 | 59, 145 | Neidr | 57.3 | 36.1 | 4273 | 3664 | |||
| G11 | 65,156, 157, 158 | Alver | 76.16 | −66.78 | 10,127 | 1585 | |||
| G13 | 68, 345 | Becket | 111.2 | −40 | 408 | 753 | |||
| G15 | 89, 90, 168, 269 | Agwo/Abeeso | 145.8 | 21.8 | 10,210 | 4938 | 3678 | 7982 | |
| G16 | 96, 171 | 149.6 | 18.5 | 317 | 930 | ||||
| G22 | 72, 73, 74, 76, 77, 192, 339 | Sher Gil | 134.81 | −45.45 | 408 | ||||
| G27 | 93, 94 | Vazov | 147.86 | −65.15 | 431 | 422 | |||
| G31 | 1, 225,226, 227, 228, 229, 275, 385 | Slang | 181 | 24.3 | 10,414 | 4249 | |||
| G37 | 3, 234, 362, 363 | 196.98 | −21.13 | 1257 | 524 | 4089 | 2117 | ||
| G45 | 28, 288 | Mistral | 305.8 | 4.2 | 2827 | 1245 | 2548 | 3405 | |
| G50 | 34, 242, 243, 244, 245, 317, 318, 319, 320, 321 | Pampu | 328.3 | −58 | 6362 | 4950 | 4873 | ||
| G51 | 36, 324 | Ular | 330 | −55 | 5027 | 2079 | 4363 | 3048 | |
| G52 | 35, 325 | Sarpa | 329.1 | −53.2 | 3848 | 2233 | 2957 | 2354 | |
| G53 | 38, 329 | Havu | 331.4 | −52.2 | 1257 | 453 | 842 | ||
| G54 | 248, 249, 334 | Bitin | 332.1 | −51.4 | 3848 | 1021 | 4363 | 1725 | |
| G55 | 30, 105, 378 | Lermontov | 311.4 | 15.5 | 15,865 | 6980 | 13,496 | ||
| G58 | 70, 210, 346 | 124.80 | −40.09 | 440 | |||||
| G59 | 106, 387, 388 | Praxiteles/Orm | −60.27 | 25.96 | 5654 | 3804 | 11,484 | 5295 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leon-Dasi, M.; Besse, S.; Doressoundiram, A. Deep Learning Investigation of Mercury’s Explosive Volcanism. Remote Sens. 2023, 15, 4560. https://doi.org/10.3390/rs15184560
Leon-Dasi M, Besse S, Doressoundiram A. Deep Learning Investigation of Mercury’s Explosive Volcanism. Remote Sensing. 2023; 15(18):4560. https://doi.org/10.3390/rs15184560
Chicago/Turabian StyleLeon-Dasi, Mireia, Sebastien Besse, and Alain Doressoundiram. 2023. "Deep Learning Investigation of Mercury’s Explosive Volcanism" Remote Sensing 15, no. 18: 4560. https://doi.org/10.3390/rs15184560
APA StyleLeon-Dasi, M., Besse, S., & Doressoundiram, A. (2023). Deep Learning Investigation of Mercury’s Explosive Volcanism. Remote Sensing, 15(18), 4560. https://doi.org/10.3390/rs15184560