1. Introduction
As an active detection technique, light detection and ranging (LiDAR) has incomparable advantages over passive remote sensing technology in terms of obtaining structural information about three-dimensional (3D) objects. It is increasingly used in many fields, such as building modeling [
1], topography acquisition [
2], and vegetation architecture retrieval [
3].
Traditional LiDAR systems can quickly collect high-accuracy 3D data at a designated wavelength. Passive multi- or hyperspectral imagers can collect rich spectral information about ground objects, but they lack 3D spatial information. Therefore, active LiDAR and passive optical (multi- or hyperspectral) remote sensing images are often integrated to obtain both spatial and spectral information about objects, for example, by estimating the 3D chlorophyll content distributions of trees [
4]. Therefore, models that can simulate both passive and active optical remote sensing signals simultaneously need to be developed to facilitate the application of multi-source remote sensing data fusion, which is a research gap from previous studies since there are only a small number of models mentioned in the following paragraphs that can simulate both passive and active optical remote sensing signals simultaneously.
Over the past several decades, to explain the characteristics of remote sensing signals and understand the interaction between light and vegetation, some vegetation radiative transfer models have been developed to simulate passive optical remote sensing signals [
5,
6,
7]. With the development of computer technology, 3D radiative transfer models have become increasingly sophisticated by taking more details of canopies and environmental impact factors into account, with models such as the discrete anisotropic radiative transfer (DART) [
8,
9], FLIGHT [
10], RAYTRAN [
11], PS and SPS [
12], and Rayspread [
13]. Three-dimensional radiative transfer models have the advantages of higher simulation accuracy and fewer hypotheses and simplifications, however, their weaknesses have hampered their application, including the labor-intensive process to construct a large-scale scene taking many details of canopies and environmental impact factors into account, and the time-consuming calculations. The large-scale remote sensing data and image simulation framework (LESS) takes advantage of computer technologies to quickly simulate remote sensing images based on 3D large-scale scenes with fewer structural simplifications, and its accuracy is evaluated by comparison with other typical models as well as field measurements [
14]. Note that LESS simulates RS images quickly, but that constructing elaborate scenes quickly is out of the scope of this article.
LiDAR simulation models were developed later than passive radiative transfer models. Most LiDAR models were developed based on ray tracing algorithms, such as LITE [
15], extended FLIGHT [
16], DART LiDAR module [
17,
18], and HELIOS [
19]. However, computational efficiency and ease of use are still issues that hamper the application of these models. Compared to its predecessor HELIOS, HELIOS++ had a greatly improved ease of configuration and reduced runtime [
20], while a friendly GUI (graphical user interface) and some prepared 3D structural scenes are still expected to help its users. Although lacking a GUI, HELIOS++ offers integration with popular software such as CloudCompare, QGIS, and Blender in order to facilitate the generation of input data.
Those separate active or passive radiative transfer models cannot fulfill the requirement of multi-source data fusion when we are facing so rich and varied remote sensing data. Some LiDAR models have been extended based on passive optical radiative transfer models, such as FLIGHT [
16] and DART [
17,
18], which can simulate optical remote sensing images and LiDAR signals. This kind of combined model is significant because it enables investigators to quantitatively evaluate the accuracy of the fusion of LiDAR and optical image data and explore the applications of fused passive and active data.
In recent years, the development of multi- or hyperspectral LiDAR instrument has become increasingly popular [
21], which can combine the characteristics of 3D structural and spectral information and provide more accurate remote sensing detection and physiological and biochemical vegetation parameter retrievals than other approaches. For example, Rall and Knox demonstrated a vegetation index LiDAR technique using two laser diodes straddling the chlorophyll absorption peak at 680 nm [
22]. Pan et al. applied a multispectral LiDAR point cloud data with three channels to classify land cover [
23]. Hakala et al. presented the concept and the first prototype of a full-waveform hyperspectral terrestrial laser scanner, which makes it possible to study efficiently, e.g., the 3D distribution of chlorophyll or the water concentration in vegetation [
24]. Although most multi- or hyperspectral LiDAR instruments are still at the prototype or developmental stage, a multi- or hyperspectral LiDAR model is required to optimize the design and explore its applications.
Our objective is to develop a LiDAR simulator based on the LESS model, capable of accurately simulating both single-wavelength and multispectral LiDAR as well as passive optical remote sensing images. Unlike existing simulators that rely on simplified assumptions, our simulator employs a ray tracing algorithm that incorporates the complex characteristics of real-world scenes. This approach ensures a more realistic representation of LiDAR instruments across different platforms, taking into account factors such as the location, direction, and wavelength of each laser pulse emitted.
An important aspect of our proposed LiDAR simulator is its utilization of the original LESS model’s advantageous features. These include a user-friendly graphical user interface (GUI), allowing for easy configuration and generation of visually compelling 3D scenes. By harnessing these capabilities, we are able to provide a proof-of-concept demonstration through the simulation of multispectral images alongside their corresponding multispectral LiDAR waveforms.
In order to assess the accuracy of our proposed LiDAR simulator, we conducted evaluations focusing on waveforms and 3D point outputs using the DART LiDAR module. Additionally, we compared the performance of our LESS LiDAR simulator with that of both the DART LiDAR module and HELIOS++. By considering both accuracy and performance results together, it becomes apparent that our study introduces novelty in two key aspects: first, LESS enables efficient simulations without sacrificing accuracy; second, its reduced simulation time renders it a practical choice for researchers in this field.
Our proposed LiDAR simulator offers multi-ray and single-ray modes for simulating point clouds which are also offered by models like HELIOS++. The first mode employs multiple ray casting queries to simulate the divergence of a laser beam; hence it is referred to as the “multi-ray point cloud simulation”. This mode generates simulated full waveforms containing valuable additional information that can offer profound insights into scanned objects. The second mode, known as the “single-ray point cloud simulation mode”, treats the beam as a single ray. This mode also presents itself as a valuable choice for scenarios where efficiency is prioritized, especially in situations involving shorter distances and smaller laser footprints.
3. Method
LESS is one of the 3D optical radiative transfer models and it ranges from visible light to thermal infrared waves [
14]. Forward photon tracing and backward path tracing are implemented in LESS. LESS has been evaluated in comparison with other models with respect to accuracy, as well as field measurements in terms of directional reflectance and pixel-wise simulated image comparisons, which show very good agreement.
LESS supports the simulation of large-scale spectral images based on 3D landscapes and provides an easy-to-use GUI and related tools to construct 3D scenes. A LiDAR simulator is developed based on forward photon tracing to extend the functionality of LESS so that it can simulate active LiDAR data based on the same scenes used for passive optical images as well.
3.1. Principles of LiDAR
LiDAR is a direct extension of conventional radar (radio detection and ranging) techniques to very short wavelengths [
26]. Its main purpose is to range and detect objects.
The principle of using LiDAR to scan objects can be simply described as follows. A laser emits pulses (the time-dependent function of which is denoted
) towards the object (whose properties that are concerned can be accounted for by introducing the target profile
) and then some of the energy is scattered back to the sensor where it is measured with an optical receiver (which has a system response function denoted
). A timer measures the travel time of the pulse from the laser to the object and back to the laser scanner. The distance of the sensor to the object can be calculated based on the time of flight. Symbolically, this is an equation [
27,
28] representing the fundamental relations between the characteristics of the sensor, the target, and the received signal:
where ∗ is the convolution operator. That is, the shape of the LiDAR waveform (
) is a convolution of the time-dependent function of the emitted pulse (
) with the target profile (
) and the system response function (
) [
26].
For spatially distributed targets the return signal is the superposition of echoes from scatterers at different ranges/times, and the echo pulse is exactly the result of a convolution of those terms [
27]. In this study, the ideal situation is considered. Therefore, the system response function is a Dirac delta function.
Hence, waveform simulations were performed in two steps. First, the time (or distance)-dependent profile of the target was modeled (
Section 3.2.1 and
Section 3.2.2). Secondly, the profile was convolved with the emitted pulse to obtain the waveform (
Section 3.2.3).
Generally, there are two categories of LiDAR data formats, including point cloud (discrete returns) and full waveform. These data are offered by laser scanners on different platforms considering the location, direction, and wavelength of each emitted laser pulse. In this study, a unified algorithm is used to simulate full waveform firstly, and then point cloud data are calculated based on Gaussian decomposition of the full waveform (
Section 3.2.4).
3.2. LiDAR Simulation Based on Ray Tracing Algorithm
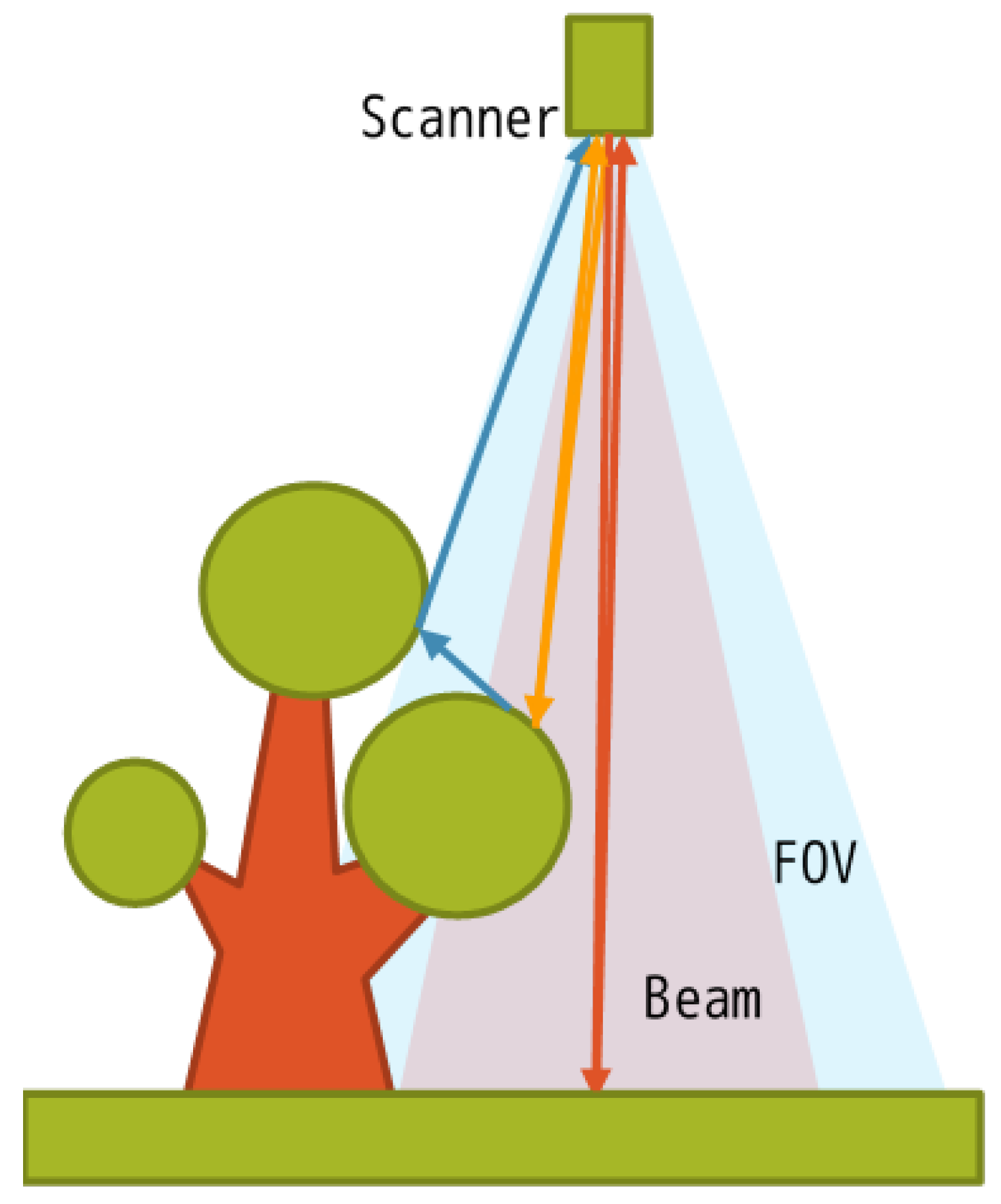
In this section, the ray tracing algorithm is applied to simulate a LiDAR signal. According to the ray tracing algorithm, a virtual laser is supposed to emit virtual laser beams in 3D space. The returns are obtained by calculating the intersection points of the virtual laser beams and the scene elements. If an intersection point can be “seen” in the field of view of the sensor, scattered energy is received by the receiver (
Figure 4).
3.2.1. Generating a LiDAR Pulse
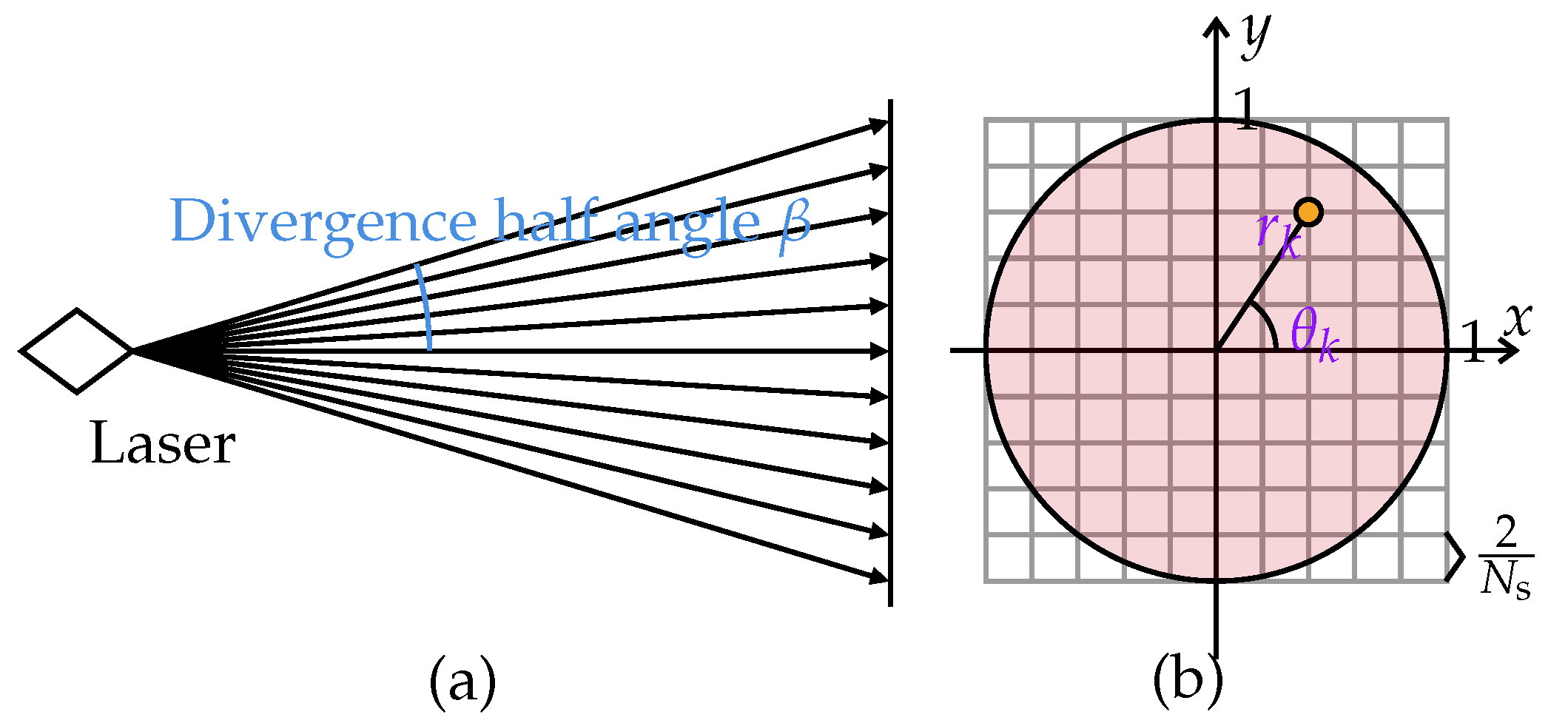
Laser has the advantage of good collimation with limited divergence angle. Generally, a laser beam can be regarded as a cone with a very small apex angle. The longer the beam path is, the larger the footprint of the laser beam is. To simulate the divergence of a laser beam, multiple ray casting queries are used to approximate the cone.
To discretize rays within one laser beam, some points are sampled in the circular cross-section the cone possesses. The origin of the rays is the apex of the cone. The rays are sent towards the sample points. The point inside the circular cross-section is also a vertex of a square grid within the cross-section. Let the radius of the circle be 1. Then, the side length of the grid cell is
, where
determines the sampling density and can be set by the user (
Figure 5). The larger the number of samples in one beam is, the more accurate the simulated signal is, and the slower the calculation procedure is.
Given all the sample points inside the circle whose polar coordinates are
, where
N is the number of samples (
here) and
and
are the distance and angle of the
kth sample, the weight of the initial ray (subscript 0) assigned to the emitted ray corresponding to the sample
is
where
P is the pulse energy and
is a non-increasing function, because the energy reduces from the center to the edge of the footprint. Therefore, a Gaussian function
is used to depict the spatial distribution of energy across the beam path, where
is the deviation of the spatial energy distribution.
3.2.2. Pulse Propagation
After rays are sent from the light source, the pulse propagation is traced. This section presents the calculation method for the intersections between rays and objects and the simulation of scattering rays with directions and weights.
a. Intersections
To handle the scenes and calculate the intersections, Mitsuba [
29], a research-oriented rendering system, is used in this study. In fact, the implementation of LESS is based on the open source ray tracing code Mitsuba. Mitsuba provides a flexible plugin architecture, which makes it possible for developers to extend LESS with new functionalities without knowing and recompiling the whole system [
14].
For each intersection, two new rays are generated. A ray is sent directly towards the LiDAR sensor with a weight . The other ray is sent to a randomly selected direction with a weight , where n represents the number of scattering orders for the kth ray. The calculations of the direction and the weight of the two rays are described as follows.
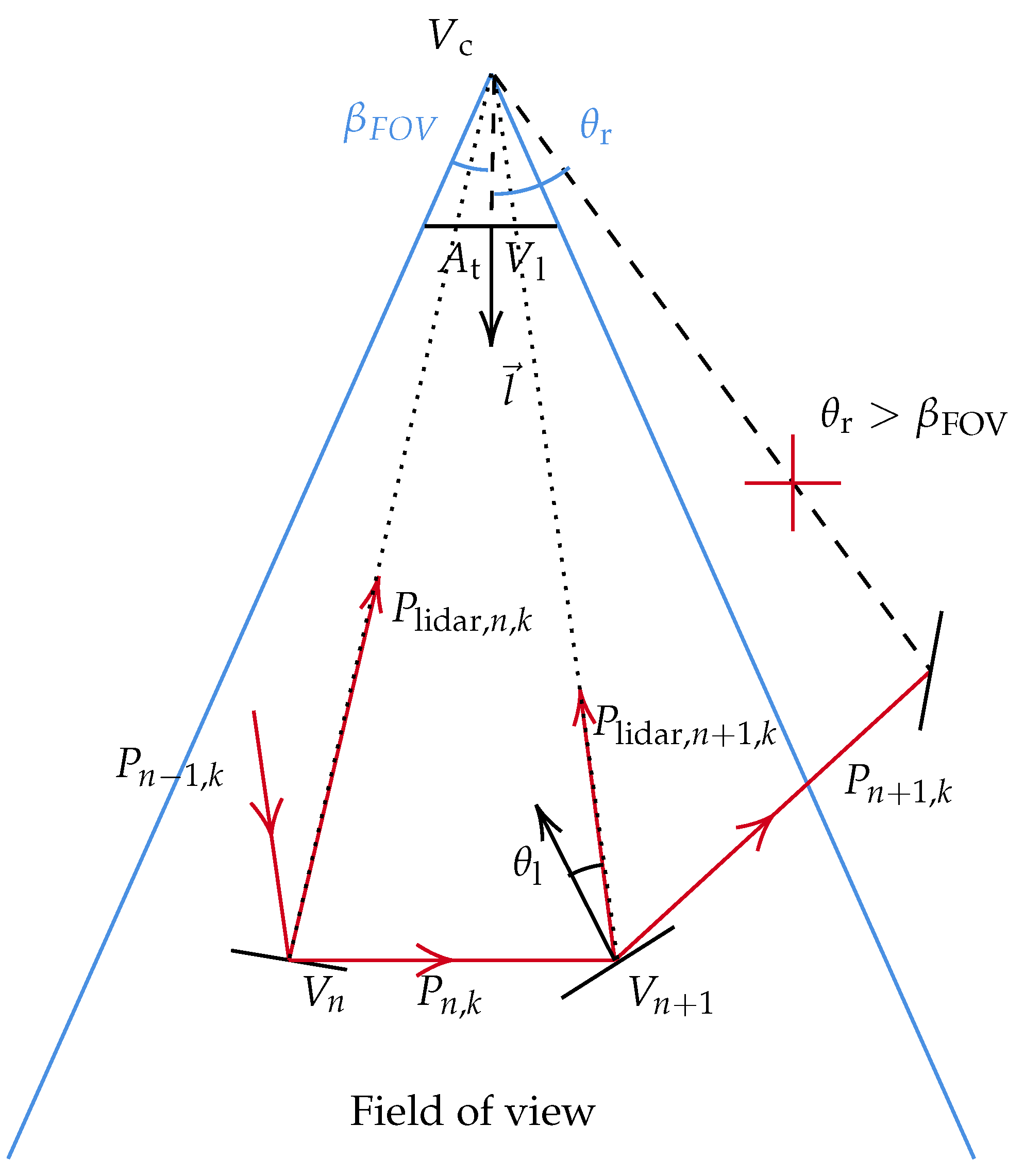
b. The ray sent towards the LiDAR sensor
The ray sent directly towards the LiDAR sensor has a weight
where
has value of 1 if the intersection point is in the field of view (FOV) and visible to the sensor, and 0 otherwise,
is the reflectance of the surface at the intersection point, and
is the view zenith angle in relation to the surface normal. Note that the scene elements are assumed to be Lambertian with known reflectance in this paper. The solid angle can be given as
where
is the aperture area of the telescope,
S is the distance between the intersection point and the sensor, and
is the angle between the viewing direction of the sensor and the opposite direction of the ray from the intersection point to the sensor.
If scattered energy is received by the telescope of the receiver, an incident angle should be smaller than half the dispersion angle of the FOV. Let
,
,
, and
denote half the dispersion of the FOV, the telescope aperture radius, the unit vector of device orientation, and the vector representing the position of the device, respectively. The vector
representing the reception convergence point is
Let
denote the intersection point. The incident angle is calculated as
If
, the telescope can receive scattered energy (
Figure 6).
c. The ray sent to a randomly selected direction
For each scattering event, the
kth ray is pointed in a random direction with a weight
where
is the weight of the incident ray,
n denotes the scatter order, where
a is the absorption, namely,
, where
is the reflectance, and
is the transmittance of the scene element. Then,
represents the proportion that is not absorbed in this scattering event.
The scattering direction is also supposed to be decided. First, a decision is made equally and randomly between a reflection or a transmission. Secondly, the direction of the ray is a cosine-weighted vector sampled on the unit hemisphere.
To sample a cosine-weighted vector on the unit hemisphere, a random point on a unit disk is generated. Then, the point is projected along the
z-axis [
30]. To generate a random point on the disk of unit radius, a random point
on
(a square) is passed through a map between a square and a disk. The polar coordinates of the point on the disk are denoted as
, where
r is the distance of the point from the disk center, and
is the angle from an arbitrary reference direction on the disk. The map is
where
, and
. Hence, the cosine-weighted vector on the unit hemisphere is
.
Then, a transformation is performed, which maps the direction vector from the local space to the world space.
Stop if the ray escapes the scene, or if the predefined number of scattering orders is reached.
3.2.3. Signal Recording
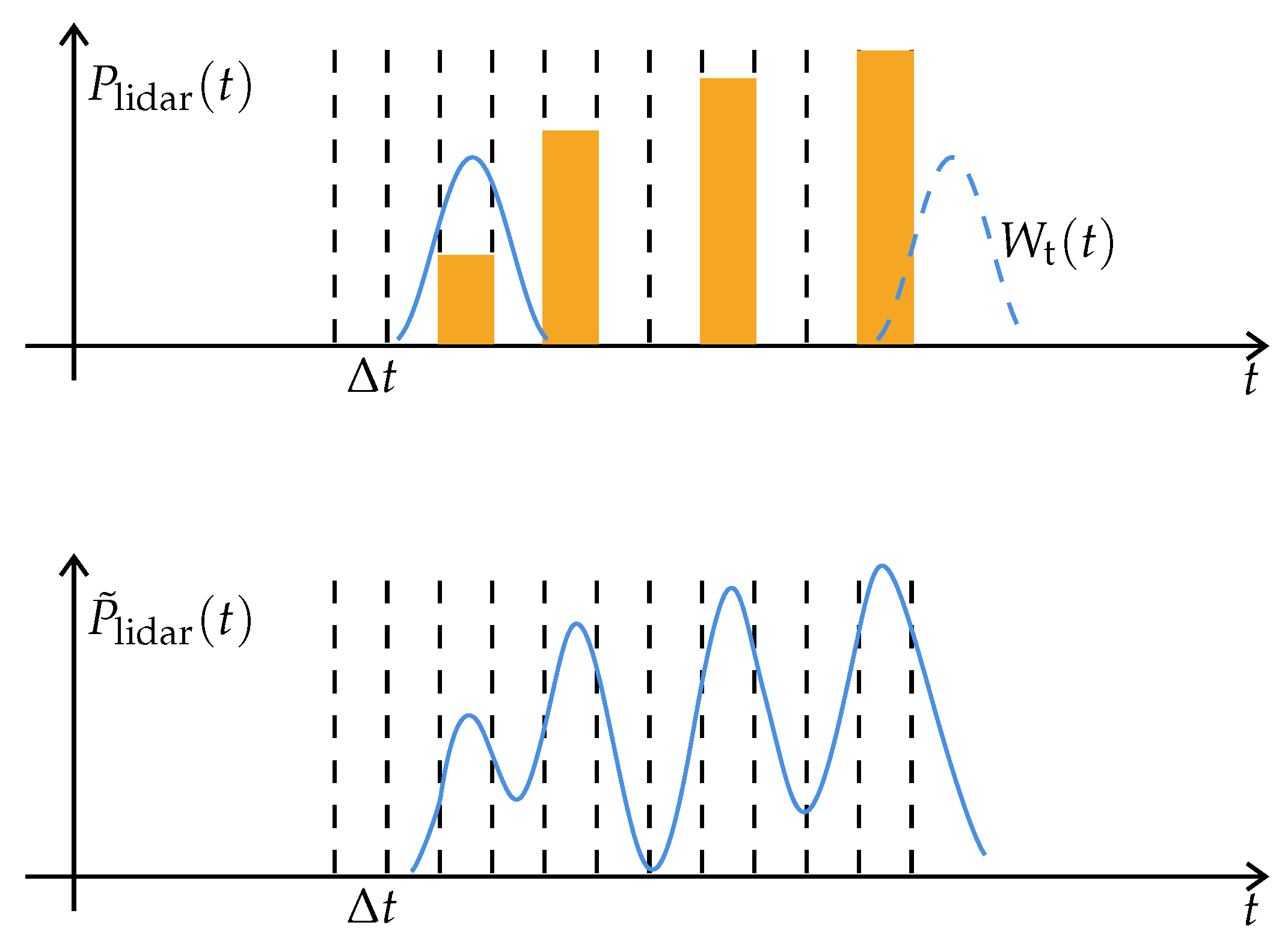
To obtain the waveform, the estimation of the target profile is convolved with the emitted pulse. The process is shown schematically in
Figure 7. The weight
and the travel distance when the ray returns to the sensor are used. The received weights are binned into several bins according to their travel distances. The width of each bin is defined by the input acquisition rate
, which is related to the device specification. For example, the acquisition rate of Riegl LMS-Q680i is 1 ns. Then, the accumulation of these weights, denoted
, is the estimation of the target profile.
The central part of a Gaussian function is used to fit the emitted pulse:
where
is a positive real number standing for the standard deviation of the Gaussian function, and
is the half pulse duration in number of sigma, then
is the half pulse duration in nanoseconds. Here, the half pulse duration in number of sigma
is one of the input parameters of the model. That is, in practice, the laser pulse has a curved shape and finite duration. In this study, we assume a Gaussian-shaped pulse defined by a half pulse duration at half peak (
in nanosecond) and length of tails measured in standard deviations. It is known that the integral of the Gaussian distribution probability density function within 3 standard deviations of the mean (above or below) makes up 99.73% of the area under the curve. Therefore,
is sufficient to represent the pulse.
If the half pulse duration at half peak
is given (for example,
is used to drive the airborne laser scanning (ALS) simulation here), the standard deviation
of the Gaussian function can be determined according to the equation
Note, if the emitted pulse path is perpendicular to a perfectly planar surface, the received waveform will have one pulse with the same duration as the emitted pulse. This suggests a method to estimate the half pulse duration at half peak, .
Once the estimation of the target profile, that is, the accumulation of the weights,
, has been generated, and if the emitted pulse
has been given according to Equation (
9), the waveform
is obtained by convolving
with the emitted pulse
.
The profile and the pulse are represented as arrays in computer programming, specifically. Hence, denote the profile
and the emitted pulse
, where
i is an integer. According to the discrete convolution formula [
31], the waveform, denoted
, is
where the integer
n controls the number of samples from
, estimated by the equation
3.2.4. Pulse Post-Processing
Gaussian decomposition enables the retrieval of point clouds [
32]. The basic idea of Gaussian decomposition is to represent an approximate waveform
that is close to the original waveform
as the sum of
M Gaussian functions:
where
,
, and
are the center, standard deviation, and amplitude of the
ith Gaussian component, respectively.
When retrieving point clouds,
is the distance between a point and the sensor. Thus, the
ith point from a waveform indexed
j can be presented as:
where
is the unit vector of the pulse direction and
is the vector representing the position of the device, which is also the pulse start position. The terrestrial laser scanning (TLS) tends to have an identical device position
for each single-site scanning, while those LiDAR scanners mounted on moving platforms like ALS have a series of changing device positions.
3.3. LESS LiDAR Simulator
The LiDAR simulator is integrated into LESS [
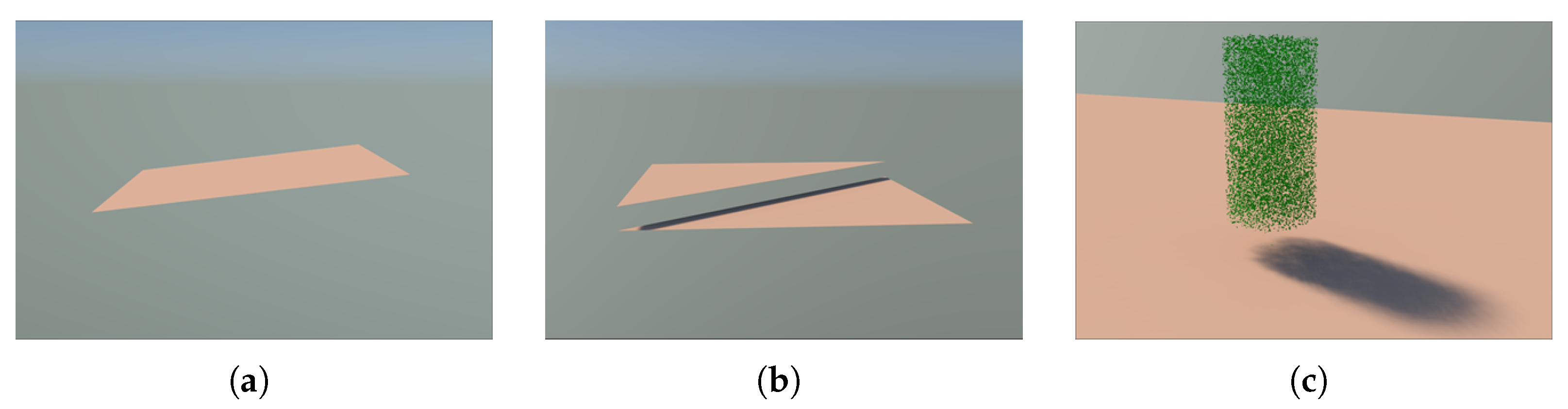
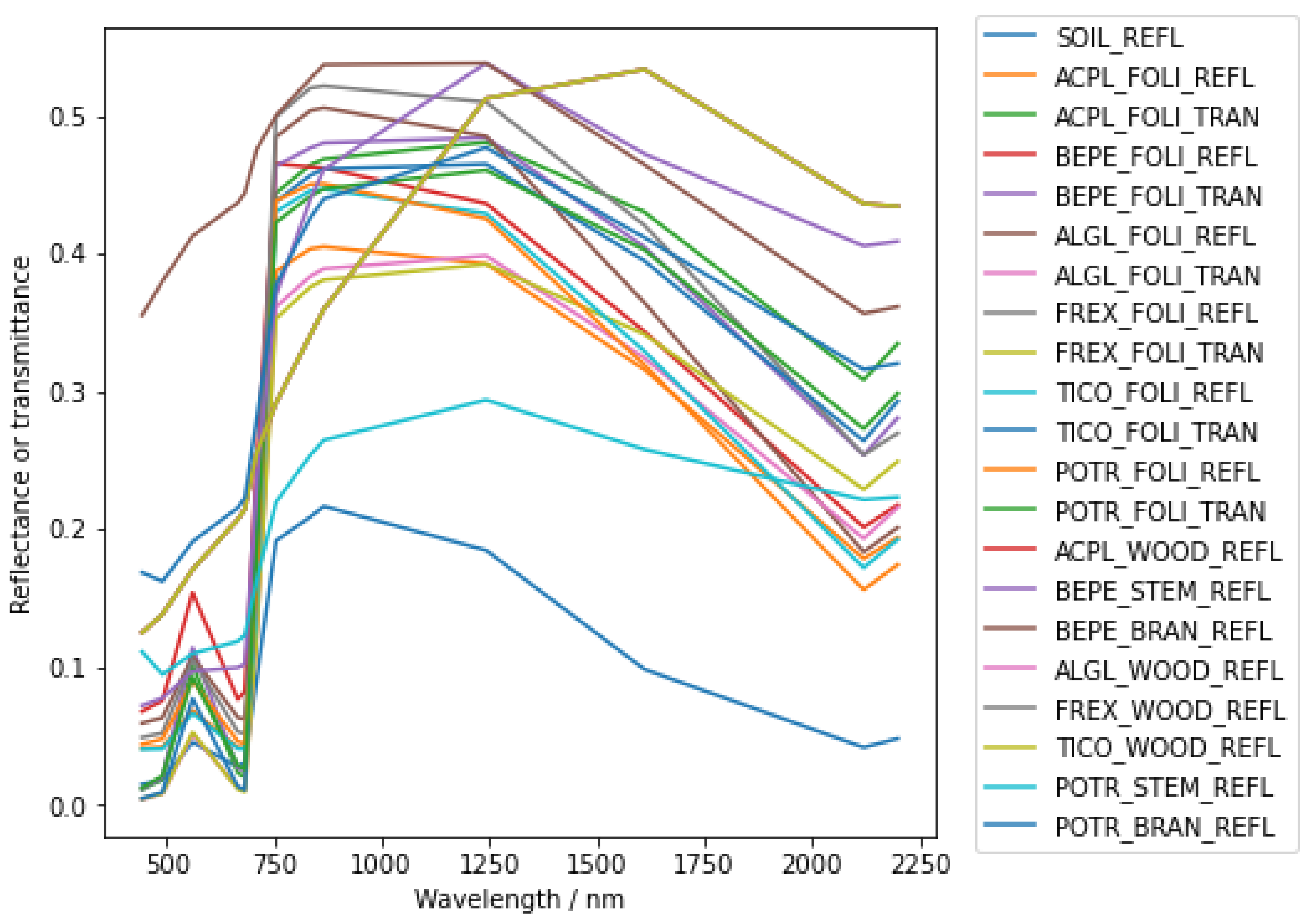
14], where easy-to-use graphical user interfaces and related tools for configuring the simulations are provided, such as constructing a complex 3D scene model in the wavefront object file type and setting the spectra of all components (background, tree branches, leaves, and so on). The OBJ file format is chosen as it is a commonly used format for 3D scenes. In case users have 3D data in other formats, conversion to OBJ format can be achieved using popular 3D software like Blender. As of now, LESS has the capability to accept OBJ files as input for 3D scenes.
The procedure introduced above simulates the LiDAR waveform and its points of one pulse. Multi-pulse data can be simulated by running the procedure in a loop. During multi-pulse acquisition, some parameters such as the sensor area and FOV half angle are constant terms, whereas the device position and the pulse direction are variables (
Table 2). In waveform data processing, waveforms are decomposed into points, which are estimated locations of scene elements. Moreover, another simulation approach is also developed to generate the point cloud called a single-ray point cloud simulation, which is efficient for simulating point clouds of targets a short distance away and with a small divergence angle of the laser where the footprint is very small so the pulse is treated as one ray. The coordinates of the first intersection give the position of a point. The single-ray point cloud mode can obtain 3D information quickly and test the configuration parameters for the formal simulation.
In order to improve the processing speed, multi-threading processing is implemented. This uses the fact that each pulse is independently simulated with its own geometry.
The LESS LiDAR simulator supports the importation of actual and abstract configurations about the device and platform parameterization (e.g., platform path and angular/distance separation between pulses).
The actual configurations can be defined by an imported file setting the characteristics of each pulse (LiDAR position and orientation per pulse), which can be extracted from actual data. The LiDAR simulation based on the actual configuration is convenient to compare with actual data.
The abstract configurations can vary from platform to platform. This paper concentrates on terrestrial (TLS) and airborne (ALS) acquisitions. Two scanning modes for the platforms of TLS and ALS can be chosen. Both TLS and ALS modes simulate LiDAR signals based on the same procedure introduced above. The difference between TLS and ALS modes is the moving style of the platform, which can change the location and direction of each emitted laser pulse. The abstract configuration of the TLS mode is given by a regular grid with the following input parameters: (1) device position, and (2) grid mesh along the azimuth and zenith directions (angle range and angular separation between pulses). The abstract configuration of the ALS mode is given by a regular grid with the following input parameters: (1) start point and end point of the central axis of the swath region, and (2) grid mesh along the azimuth and range directions. Then, a waveform is simulated per grid node.
The waveform and the point coordinates are represented as arrays. Therefore, the waveform and point cloud data are column-oriented data stored in ASCII delimited text files compatible with libraries (for example, numpy or pandas in Python) and software (for example, Cloud Compare (
www.cloudcompare.org, accessed on 10 September 2023)) that process data, which makes the information easy to access.
5. Discussion
5.1. Multispectral LiDAR vs. Multispectral Imaging
Multispectral remote sensing images have been widely applied in many fields of Earth observation. Horizontal heterogeneity can be observed by multispectral imaging, but vertical variation may not be obtained directly. Fortunately, multispectral LiDAR combines the characteristics of multispectral imaging and LiDAR techniques into a single instrument without any data registration. It provides more information than multispectral imaging or LiDAR alone.
Although some laboratories are developing multispectral LiDAR technology, proven multispectral LiDAR instruments for monitoring the vegetation are still lacking. To explore the ability of multispectral LiDAR, multispectral LiDAR signals are simulated by the LESS LiDAR simulator and compared with multispectral images in this section. The LESS model can simulate multispectral LiDAR and images based on the same set of parameters, including 3D scenes and the components’ spectrum. An example using the normalized difference vegetation index (NDVI) [
33] is designed to show that the proposed LiDAR model has the ability to simulate multispectral waveforms. Both the multispectral image and the waveforms are simulated based on the RAMI-V scene using the previously released LESS model and the proposed LESS LiDAR simulator, which is an extension of LESS. The LESS LiDAR simulator can simulate returned signals in multiple bands at the same time, instead of one band at a time, which can keep the simulated multispectral waveforms using the same ray paths and greatly save computing time.
The parameters in
Table 6 and
Table 7 are used to drive the simulations of multispectral image and waveforms.
The values at wavelengths of 665 nm (a typical red band) and 754 nm (a typical NIR band) are chosen to compute the NDVI. The NDVI of the image is computed in a traditional manner:
where
denotes the reflectance of the image at wavelength
b (red or NIR band).
Two kinds of LiDAR NDVIs are computed based on the LiDAR waveforms in the NIR and red bands. The NDVI profile [
34] is calculated as:
where
is the energy of the waveform at wavelength
b and bin
i.
The NDVI derived from the integrated waveform energy [
16] is defined as:
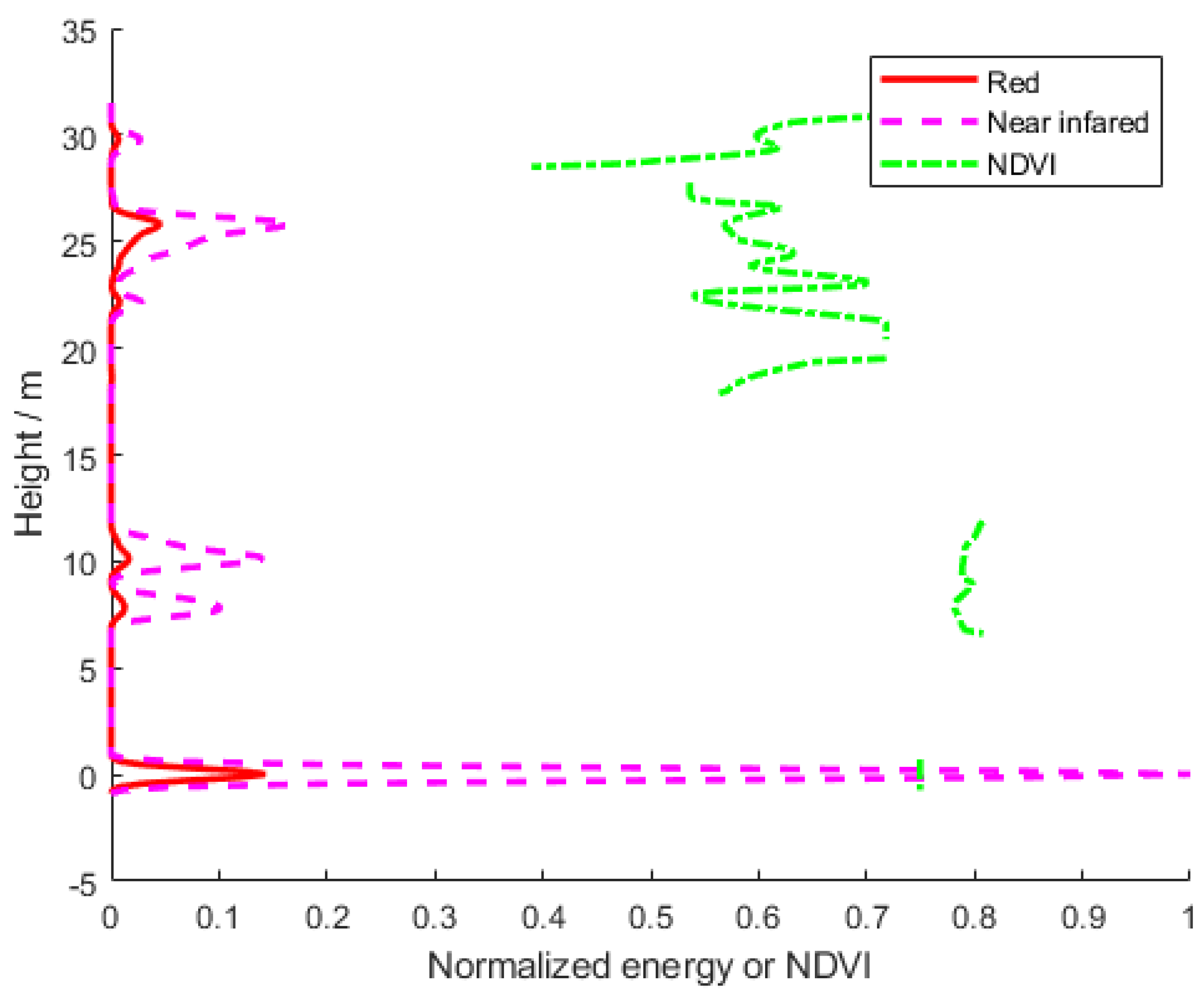
Two waveforms in the red and the NIR bands, respectively, corresponding to a certain emitted pulse are shown in
Figure 12. The values of the NIR waveform tend to be larger than the values of the red waveform due to the higher spectral reflectance characteristics of vegetation in the NIR band. An NDVI profile that can be retrieved from multispectral LiDAR waveforms in the NIR and red bands based on Equation (
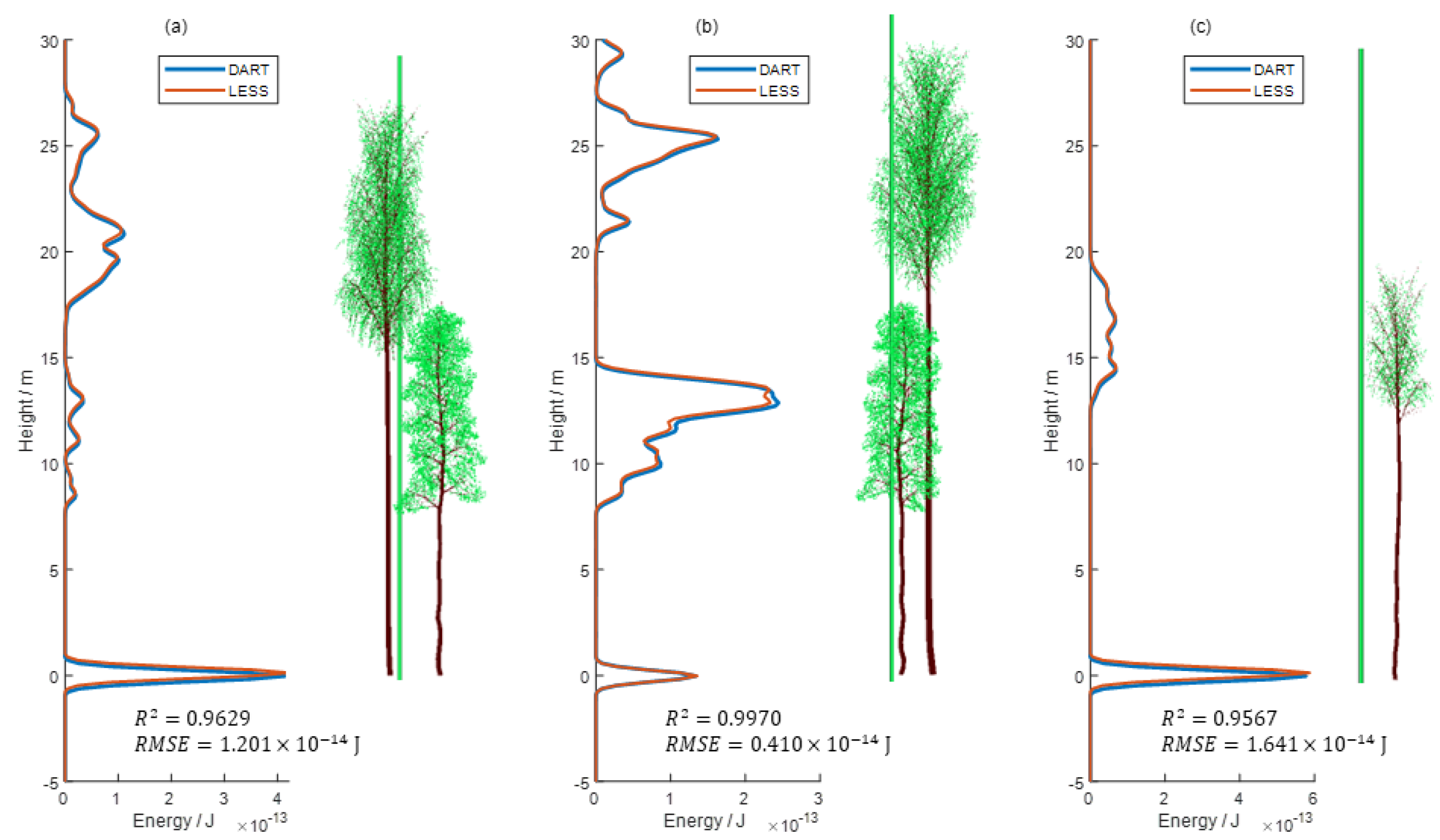
21). The NDVI profile is related to vertical parameters of vegetation, such as layered LAI and chlorophyll content. It shows that multispectral LiDAR has the capability to obtain more detailed vertical information. The NDVI profile can help to discriminate the contribution from upper or lower vegetation. For example, the reflectance of the understory is similar with that of the overstory so that it is difficult to separate trees from the background in a single reflectance image. However, it is clear from the multispectral LiDAR results that there is a background and at least two separated layers in the plot, which can be seen from the peaks of the LiDAR waveforms correlated with the horizontal levels of the elements. In fact, there are mainly two kinds of trees in the scene. The heights of
Betula pendula vary from 19.86 m to 30.51 m, and those of
Tilio cordata vary from 11.27 m to 20.70 m. Thus,
Tilio cordata crowns are beneath
Betula pendula crowns. The application of multispectral LiDAR is out of the scope for the purposes of this article so we do not deeply discuss the characteristics of the NDVI profile here.
The NDVI values derived from the integrated waveform energy (Equation (
22)) are compared with the NDVI values derived from the simulated multispectral images with different incident solar directions (
Figure 13). The differences between NDVIs from the integrated waveform energy and the image arise from two features of the illumination conditions. One is related to the geometry of the source–object–sensor. It is known that as anisotropic objects, reflectance from land surface is different with different incident and viewing directions. As an active sensor, LiDAR always receives backward signals (hot spot directions with small zenith angles), while passive sensors often receive signals reflected by the land surface of solar light with different incident and viewing directions. Therefore, it can be seen that there is a better correlation between NDVIs from waveforms and the image with SZA = 0
(
Figure 13a) than those cases with SZA = 30
(
Figure 13c) and SZA = 60
(
Figure 13e). Another reason is the issue of the adjacency effect. When generating LiDAR data, most of the accumulated contributions come directly from the elements within the footprints, while the whole scene is illuminated by the sun when generating images, and there are contributions of scattering from nearby pixels. There is more vegetation around the pixel, which causes a higher reflectance in the NIR band due to multiple scatterings. Therefore, the NDVI values derived from the images are apparently higher than those from the LiDAR waveform due to the adjacency effect. If considering the first-order scattering results only, the differences of NDVIs from the image and LiDAR decrease obviously and the corresponding coefficients of determination increase (
Figure 13b,d,f).
This result shows that the proposed LiDAR simulator fulfills the design goal of simulating multispectral LiDAR signals. It is hoped that LESS and one of its extensions, the LiDAR simulator, which offers a comprehensive simulation environment combining active and passive remote sensing simulations, can help to make multisensor fusion simulations investigations efficient.
5.2. Performance
The performance of the LESS LiDAR simulator is evaluated with the DART LiDAR module [
17,
18] and HELIOS++ [
20], which are the most popular LiDAR simulators.
In order to test the performance efficiency, the scene built from the RAMI-V data (
Section 2.2) is used. Point cloud simulations are carried out on an Intel(R) Xeon(R) Silver 4110 CPU @ 2.10 GHz with 64.0 GB of random access memory (RAM). The angular sampling for both zenith and azimuth angle is set as 0.06
. The azimuth range is 0
–360
, and the zenith range is 30
–130
. Therefore, 10 million laser pulses will be sent with different directions.
The time consumption and the output point numbers are given in
Table 8. Note that the LESS LiDAR simulator requires an additional configuration time to prepare a configuration file about the situations of the moving platform, including LiDAR locations and sending directions, which depend on the number of sending directions. In this case, it is about 4 min.
The loading scene time and simulation time are given for these three models, separately. The loading scene time “4 × (2 times)” for LESS LiDAR means the scene is loaded 2 times, and each time takes around 4 min. Because the issue of running on computers with smaller memory is considered, the simulation is simply split into several parts in this version. This method helps LESS LiDAR to run on a computer low on RAM.
In addition, LESS uses an “instance” technique, which only keeps one copy of each object in memory, and stores the geometric transforms of all individual trees. This technique can save more memory making it good for simulating a bigger scene with many similar or same objects.
The simulation time also depends on the number of rays in each laser beam. Both the DART LiDAR module and LESS LiDAR simulator use the axial division of 10, causing
rays for each beam. HELIOS++ uses a parameter called the beamSampleQuality to control the number of rays for each beam. The beamSampleQuality corresponds to the number of concentric circles where rays are sampled. If the beamSampleQuality is
s, the number of rays in each beam is
. This ensures that the angular distance between adjacent rays is approximately constant, i.e., each ray represents a solid angle of equal size [
20]. If the beam sample quality is 5, there are 61 rays for a beam. And if the beam sample quality is 6, there are 98 rays for a beam. Both of them are close to the 79 used in the DART module and LESS LiDAR simulator. To simulate efficiently, 61 rays for a beam is chosen for HELIOS++. More rays makes little difference to the results.
The total time is the sum of the configuration time, loading scene time, and simulation time. It it obvious that the LESS LiDAR simulator requires the shortest time among the three models, and its simulation efficiency is much higher than the DART LiDAR module and HELIOS++. It is important to note that we performed simulations using identical input files across all models. However, we acknowledge that this comparison may have introduced some biases because the input procedures did not optimize or leverage the unique design aspects of each model. Consequently, there is potential for further improvements in efficiency by fine-tuning the data loading settings specific to each model.
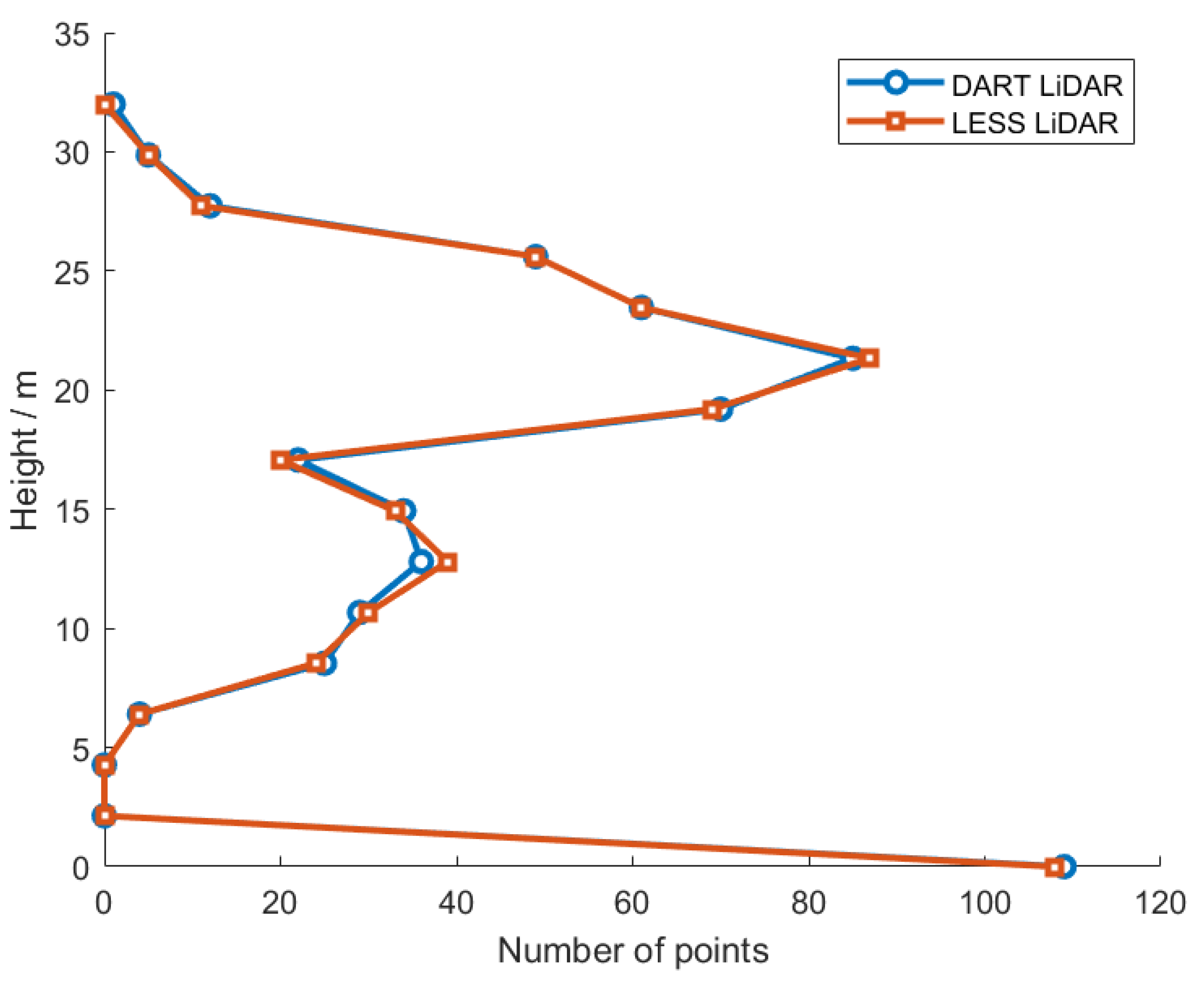
The total returned point numbers are also listed in
Table 8, and it can be seen that there are a few differences among the three models. LESS LiDAR obtains 6.6 million points in this case, which is between DART LiDAR and HELIOS++. LESS LiDAR and DART LiDAR achieve similar ground points. HELIOS++ has the most number of the total points, while the least number of ground points. DART LiDAR has the least non-ground points. All the sets of simulated points can be registered well with each other and the differences perhaps relate to the parameters and data processing methods used in each model.
5.3. Multi-Ray Point Cloud vs. Single-Ray Point Cloud
The procedure described in
Section 3 allows for the simulation of LiDAR waveforms and their corresponding points for a single pulse. By running this procedure in a loop, it is possible to simulate multi-pulse data.
As mentioned in
Section 3, laser beams are not infinitely thin lines, but rather cones of light that intersect surfaces within an elliptical area known as the laser’s footprint. This characteristic has implications for how light is reflected by surfaces and detected by LiDAR sensors. Modern laser scanners take these effects into account and measure the full waveform of a reflected laser pulse. The full waveform contains valuable additional information that can be used by LiDAR researchers to gain insights into scanned objects. To simulate the divergence of a laser beam, multiple ray casting queries are used to approximate the cone. This mode is referred to as the multi-ray point cloud simulation.
In addition to the multi-ray approach, another simulation method known as the single-ray point cloud simulation has been developed. This method is efficient when simulating point clouds from targets located at a short distance with a small divergence angle of the laser beam. In such cases, where the footprint is very small and the beam can be treated as one ray, each point’s position is determined by the coordinates of its first intersection with a surface. This method is efficient due to reducing the ray casting queries.
To evaluate and compare the performance between the single-ray point cloud simulation mode and multi-ray point cloud simulation mode,
Table 9 presents relevant metrics.
With respect to simulation time, it was found that the single-ray point cloud mode demonstrated a significant advantage over its multi-ray counterpart, completing simulations in less than 1 min compared to the 28 min required by the latter.
Considering the numbers of points generated by both modes, similar values were observed: approximately 6.2 million points for the single-ray mode and 6.6 million points for the multi-ray mode. However, it is noteworthy that the single-ray point cloud mode exhibited slightly fewer points, approximately 6.0% less than the multi-ray point cloud mode.
Further analysis reveals comparable numbers of ground points in both modes. The single-ray point cloud mode yielded 3.5 million ground points, while the multi-ray point cloud mode generated 3.6 million ground points, resulting in a difference of only 2.7%.
In terms of non-ground points, notable discrepancies emerged between the two modes. The single-ray point cloud mode produced approximately 2.7 million non-ground points, whereas the multi-ray point cloud mode generated slightly more at 3.0 million non-ground points, representing an approximate reduction in non-ground point numbers by about 10% when using the single-ray simulation approach compared to employing multiple rays.
It should be emphasized that for scenes with flattening ground surfaces, such as observed here, there is typically just one generated ground point per location; hence, there is no substantial impact on ground points.
It is important to note that non-ground points mainly originate from vegetation containing scattered leaves and branches, which introduce greater complexity into how light is reflected by surfaces and detected by LiDAR sensors. In this regard, there are often multiple intersections along a pulse beam path that can be captured by the multi-ray mode but are missed or only roughly approximated by the single-ray point simulations since they rely on recording only the coordinates of the first intersection with a surface. Consequently, using single-ray simulations may result in more points being detected by LiDAR sensors and an approximate reduction in non-ground point numbers by about 10% compared to using multiple rays.
Taken together, these findings demonstrate that utilizing a single-ray simulation approach can significantly reduce simulation time without substantially affecting overall point numbers or the ground pointswhen compared to employing multiple rays for simulations.
In summary, the single-ray point cloud simulation mode proves to be a valuable option for scenarios where relatively short distances and small footprints of the laser are involved (such as when flat ground is large enough compared to the footprints in this simulation). It allows for efficient simulations and its reduced simulation time makes it a practical choice. However, researchers should consider the potential loss of detailed information in fragmented objects when using this mode. On the other hand, the multi-ray mode simulates the divergence of a laser beam to generate simulated full waveforms containing valuable additional information that can be used by LiDAR researchers to gain insights into scanned objects.
6. Conclusions
A LiDAR simulator based on the ray tracing algorithm was developed, which is suitable for the complex landscapes of vegetation canopies with high horizontal and vertical heterogeneity. The new LiDAR simulator can simulate full waveform and point cloud signals from LiDAR loaded on different platforms, including airborne, unmanned aerial vehicles, and terrestrial LiDAR. Furthermore, it is inferred that space-borne LiDAR signals can also be simulated using LESS LiDAR as they adhere to the same underlying principles, although some issues should be considered, such as the atmospheric attenuation and the solar noise as a light source.
The proposed LiDAR simulator has the capability to simulate multispectral LiDAR data. Multispectral waveforms were simulated and NDVIs derived from waveforms and images were compared to simply analyze the characteristics of multispectral LiDAR. Realistically reconstructed landscapes can be used in the LiDAR simulator to adapt the comparable actual data. Although this is beyond the scope of this study, a more refined 3D model including various disturbances and optical characteristics would be needed to better evaluate the effects of instrument design and laser interactions with different surface features.
By considering both the accuracy and performance results together, it becomes apparent that the proposed LiDAR simulator enables efficient simulations without sacrificing accuracy.
In summary, our novel LiDAR simulator holds immense potential in advancing research within remote sensing studies and related fields. With its comprehensive simulation capabilities and improved efficiency compared to other models, it serves as an invaluable tool for the remote sensing community. Notably, several applications have already been showcased. For instance, the LESS model was employed to generate simulated data for unmanned aerial vehicle (UAV) LiDAR, enabling exploration of the potential for trunk point extraction and direct diameter-at-breast-height measurements through UAV LiDAR [
35]. Furthermore, the potential of airborne hyperspectral LiDAR in assessing forest insects and diseases has been evaluated using LiDAR simulations [
36].
With regards to the limitations of the study, several ideal assumptions were made. The future extensions of the proposed LiDAR simulator will consider solar noise, atmospheric attenuation, as well as the response function, gain, and noise of the LiDAR system. As for the performance improvements, LiDAR simulations can have high computational cost, which demands efficient computational solutions. It is suggested that LiDAR simulators may benefit from high-performance computing (HPC) algorithms or techniques. For instance, using HELIOS++ as a case study, novel algorithms run on parallel computers boost the performance [
37]. It is worth further investigating how the LESS LiDAR simulator can benefit from these algorithms or techniques.
The proposed LiDAR simulator was integrated into LESS, where an easy-to-use graphical user interface and related tools for configuring the simulations were provided. The purpose of extending the LESS model is to simulate passive images and active LiDAR signals based on the same configurations and parameters. The software of the integrated LESS can be downloaded from
https://lessrt.org (accessed on 10 September 2023), providing users with a binary installer. Individuals can refer to the documentation for instructions on scene configuration and parameter adjustment.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}