


A Handheld LiDAR-Based Semantic Automatic Segmentation Method for Complex Railroad Line Model Reconstruction

Abstract
:1. Introduction
- (1)
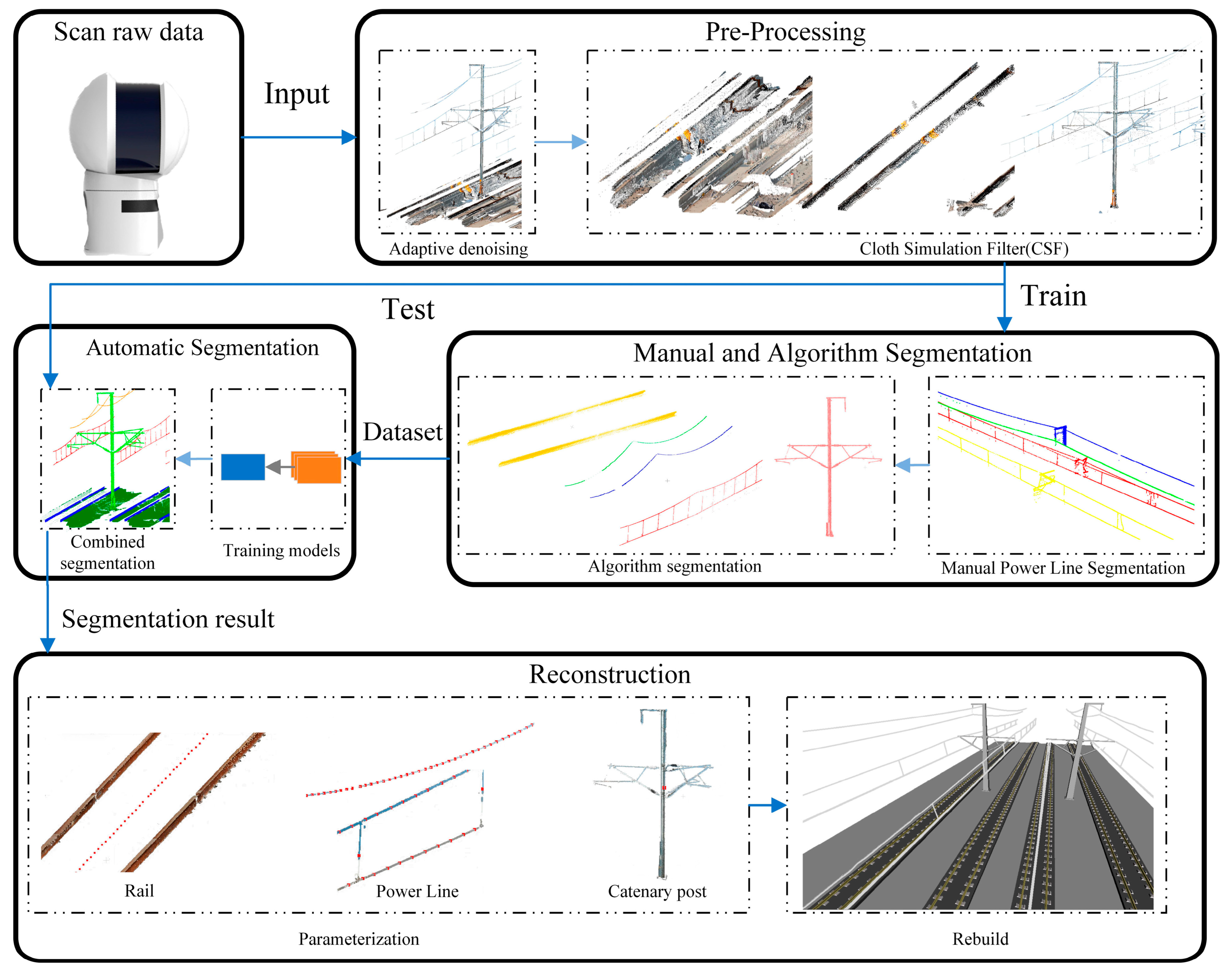
- We introduce an automatic segmentation process for extracting key railroad structures from 3D point cloud coordinate data. This segmentation process does not rely on intensity information or scanning device trajectory information, ensuring its robustness and applicability;
- (2)
- We propose an adaptive filtering process and enhance the Cloth Simulation Filter (CSF) method to cater specifically to railroad scene point clouds. This enables the separation of ground and overhead line scenes and facilitates the rough extraction of rails;
- (3)
- We develop a rail point extraction algorithm that effectively handles noise and further refines the rail extraction process after the initial rough extraction;
- (4)
- We improve the hybrid machine learning-based power line extraction algorithm to significantly enhance extraction performance;
- (5)
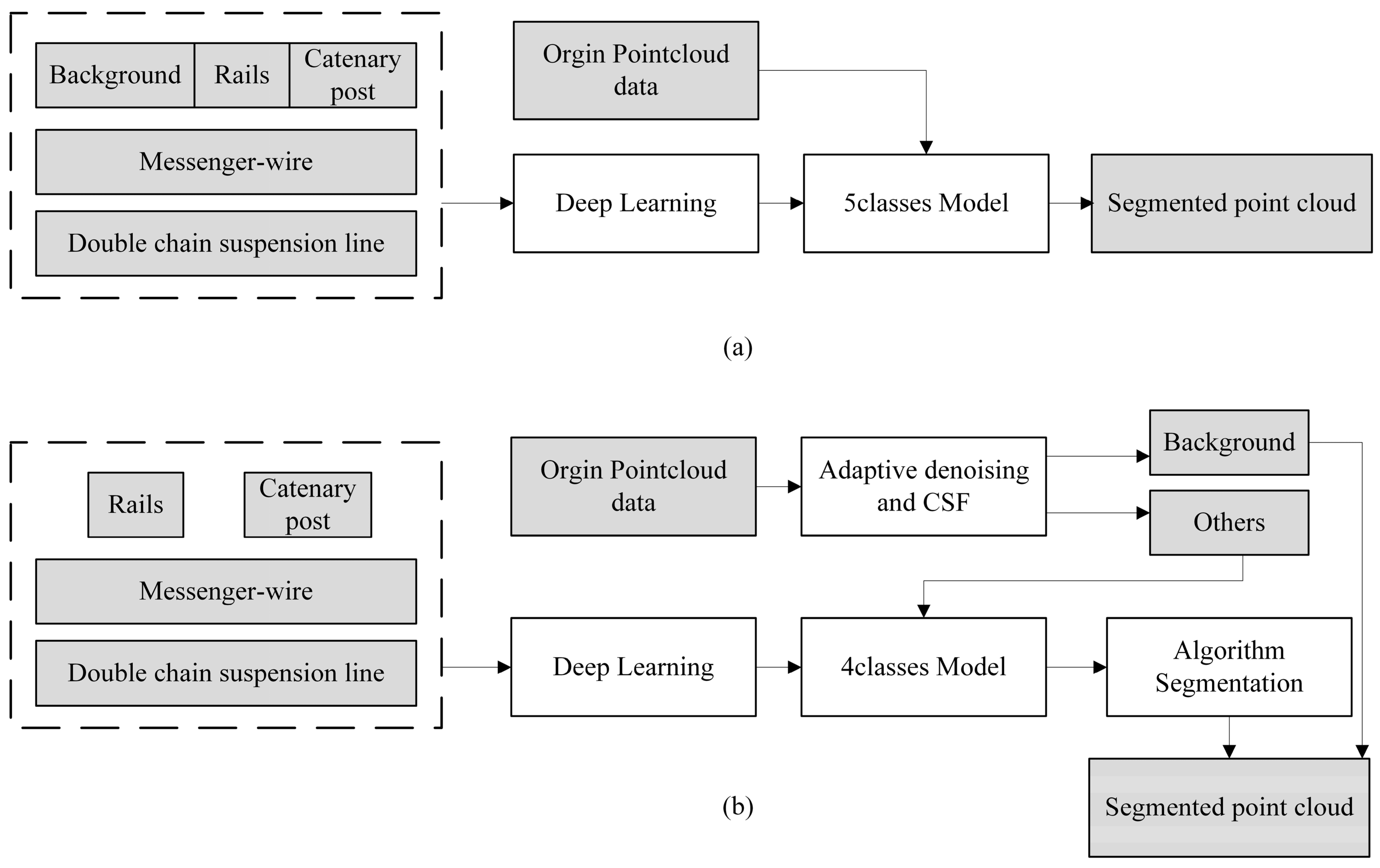
- We combine deep learning techniques with segmentation algorithms to achieve the automatic segmentation of corresponding structures. Furthermore, we establish a BIM model by performing parameterized extraction of the structure.
2. Related Work
2.1. Semantic Segmentation of Key Railroad Structures
2.2. Deep Learning
3. Methodology of Segmentation Algorithms
3.1. Data Preprocessing
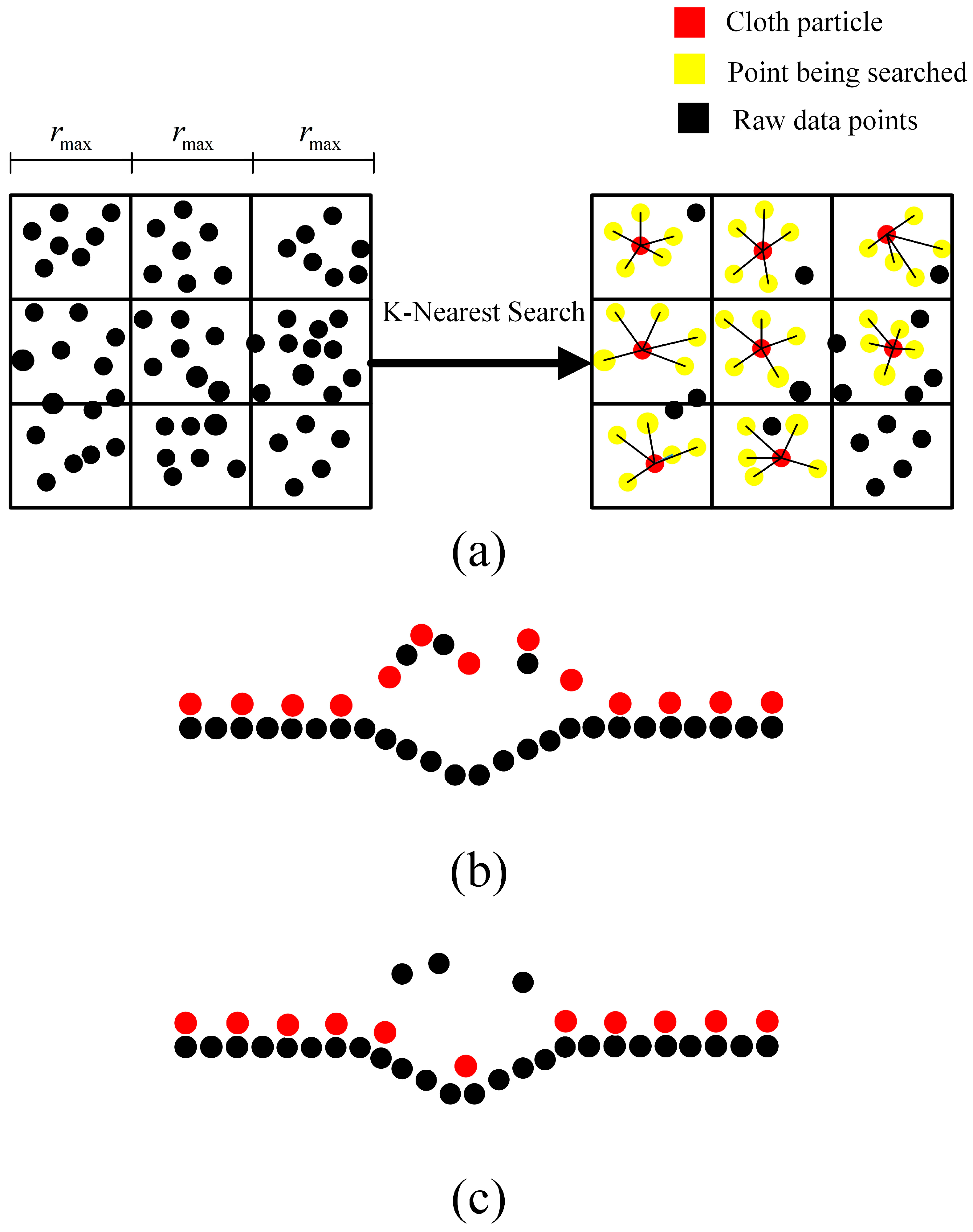
3.1.1. Adaptive Denoising
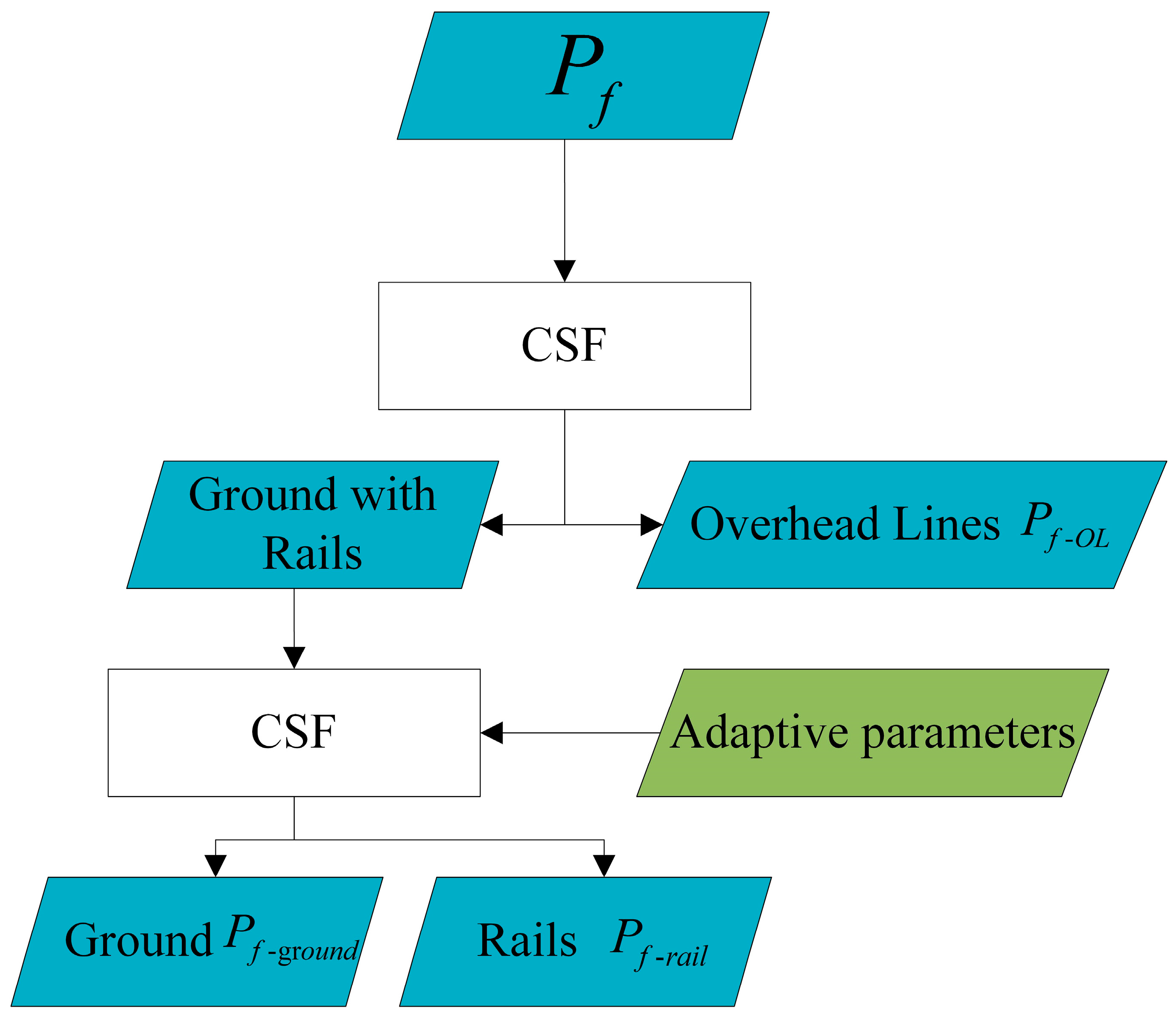
3.1.2. Scene Segmentation
- (1)
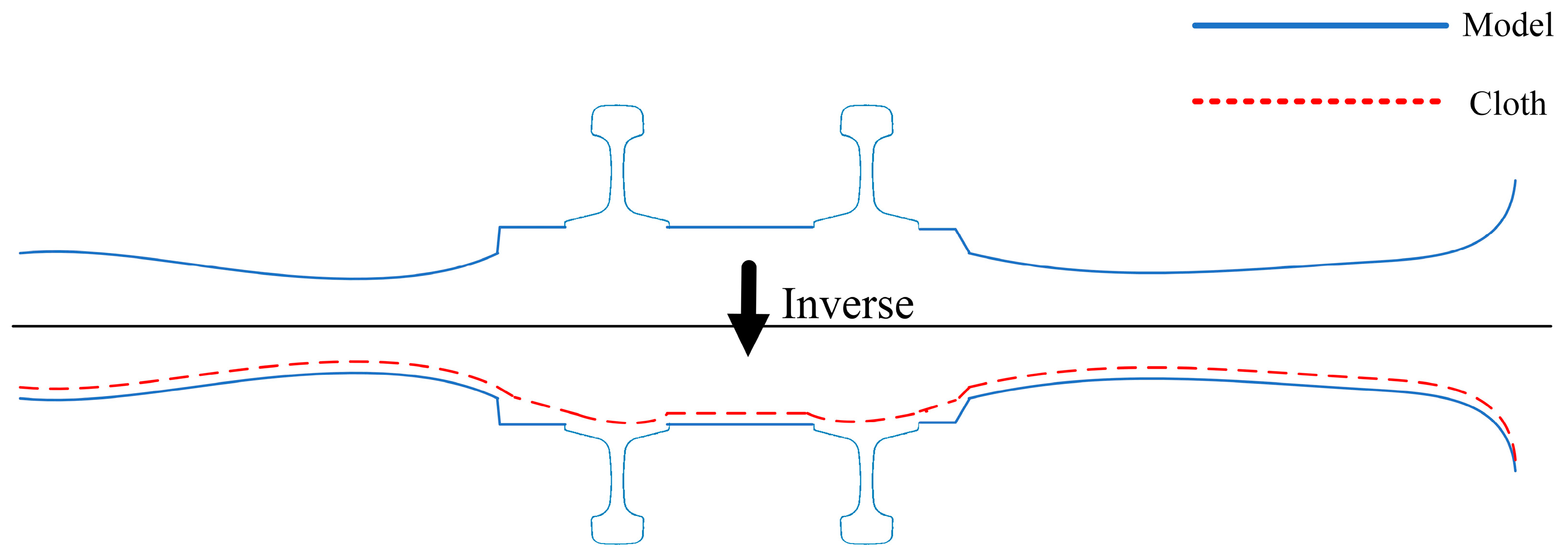
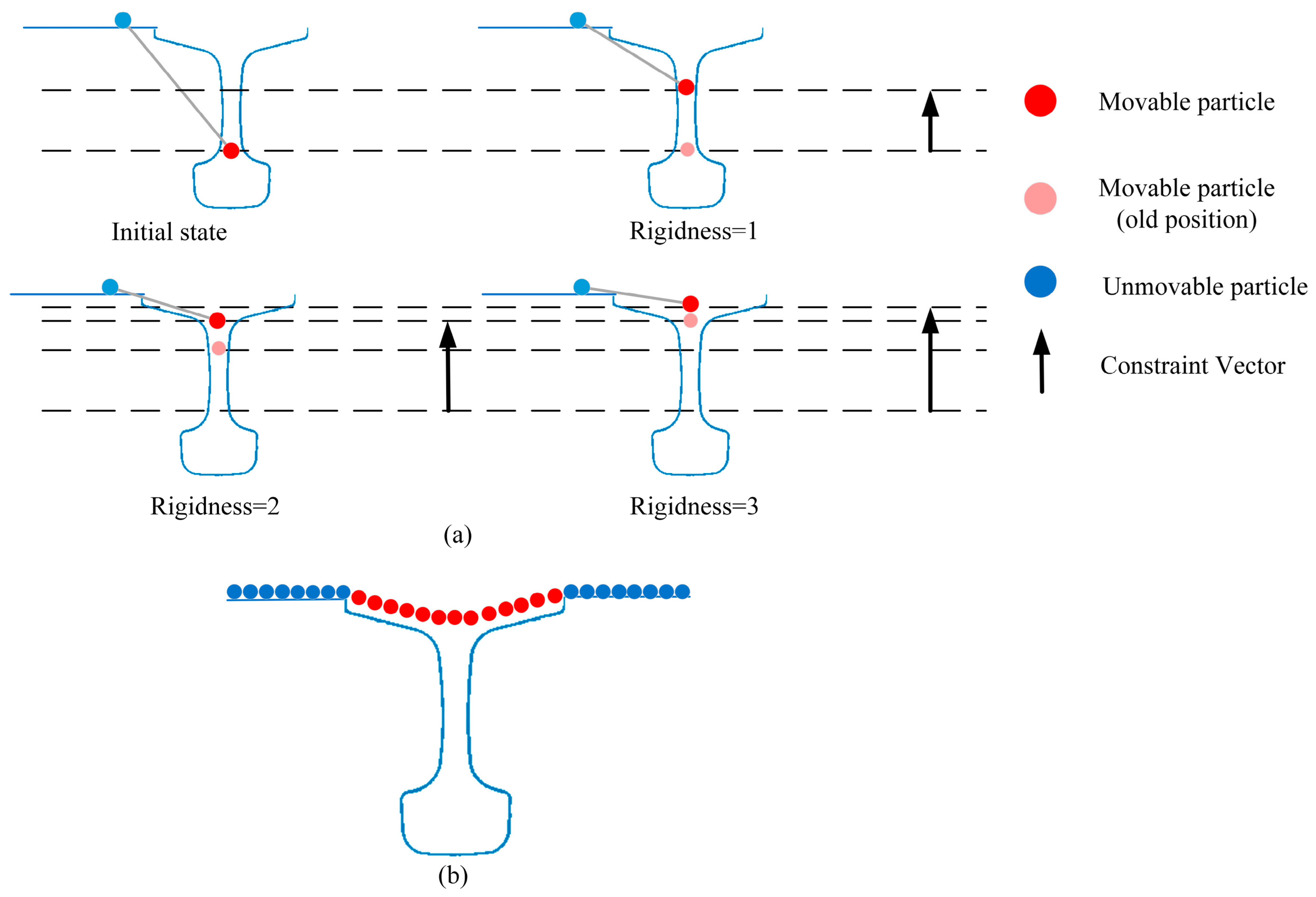
- Related Concepts on CSF.
- (2)
- CSF Adaptive Method for Rail Structure Extraction
- (3)
- Railroad Scene Segmentation Scheme
3.2. Rail Segmentation
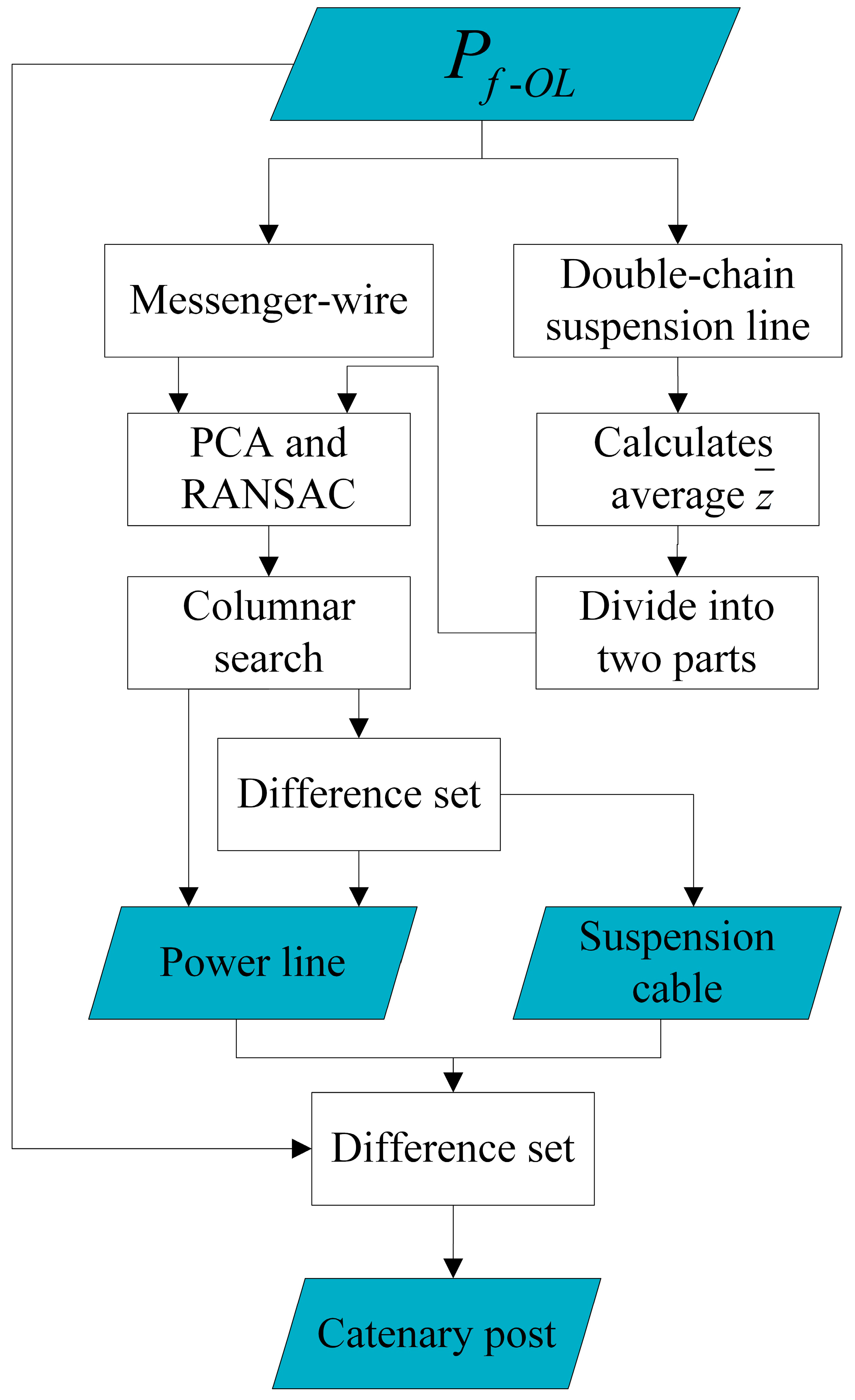
3.3. Power Line and Catenary Post Segmentation
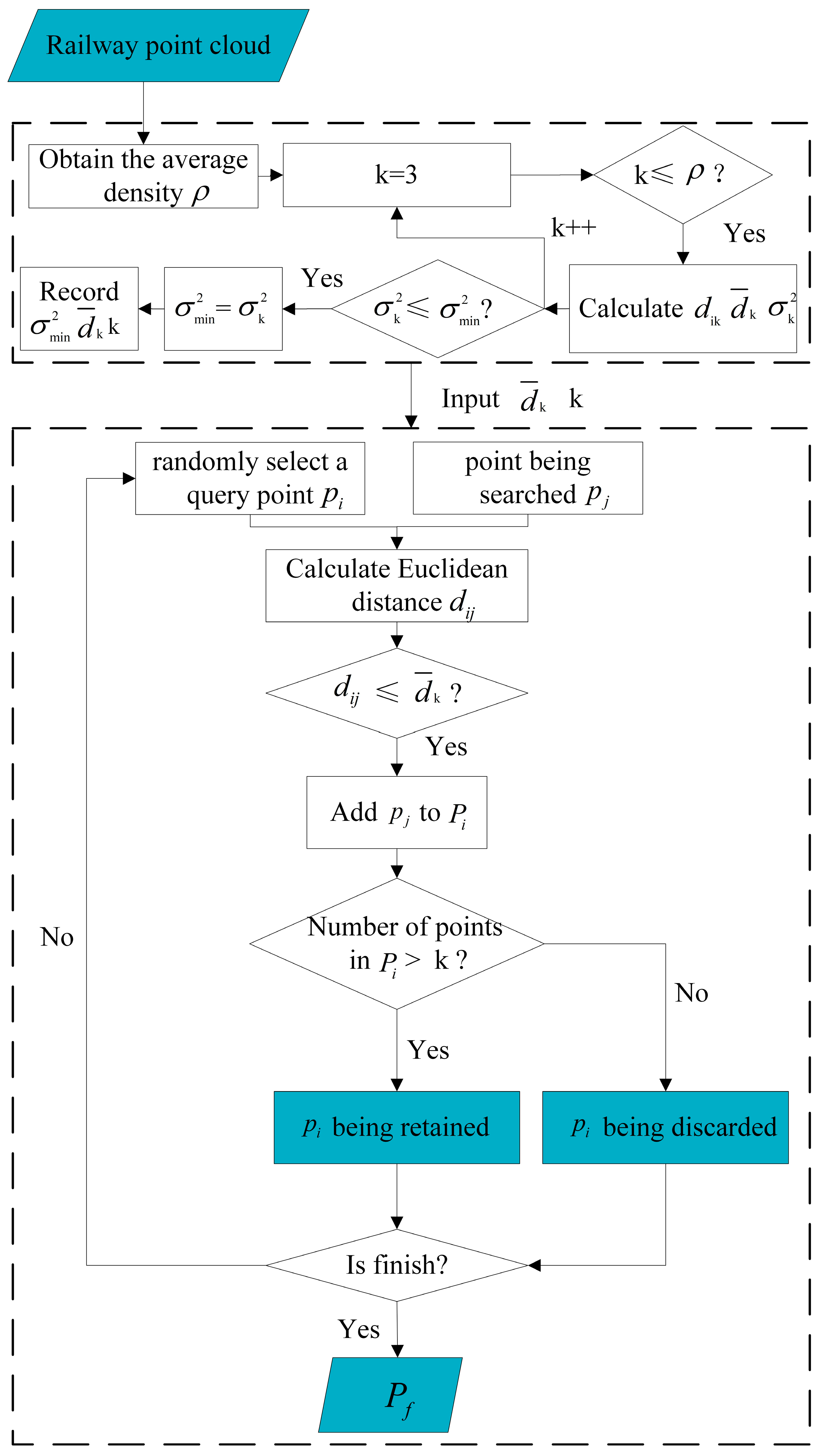
3.3.1. Candidate Points for Power Line Rough Extraction
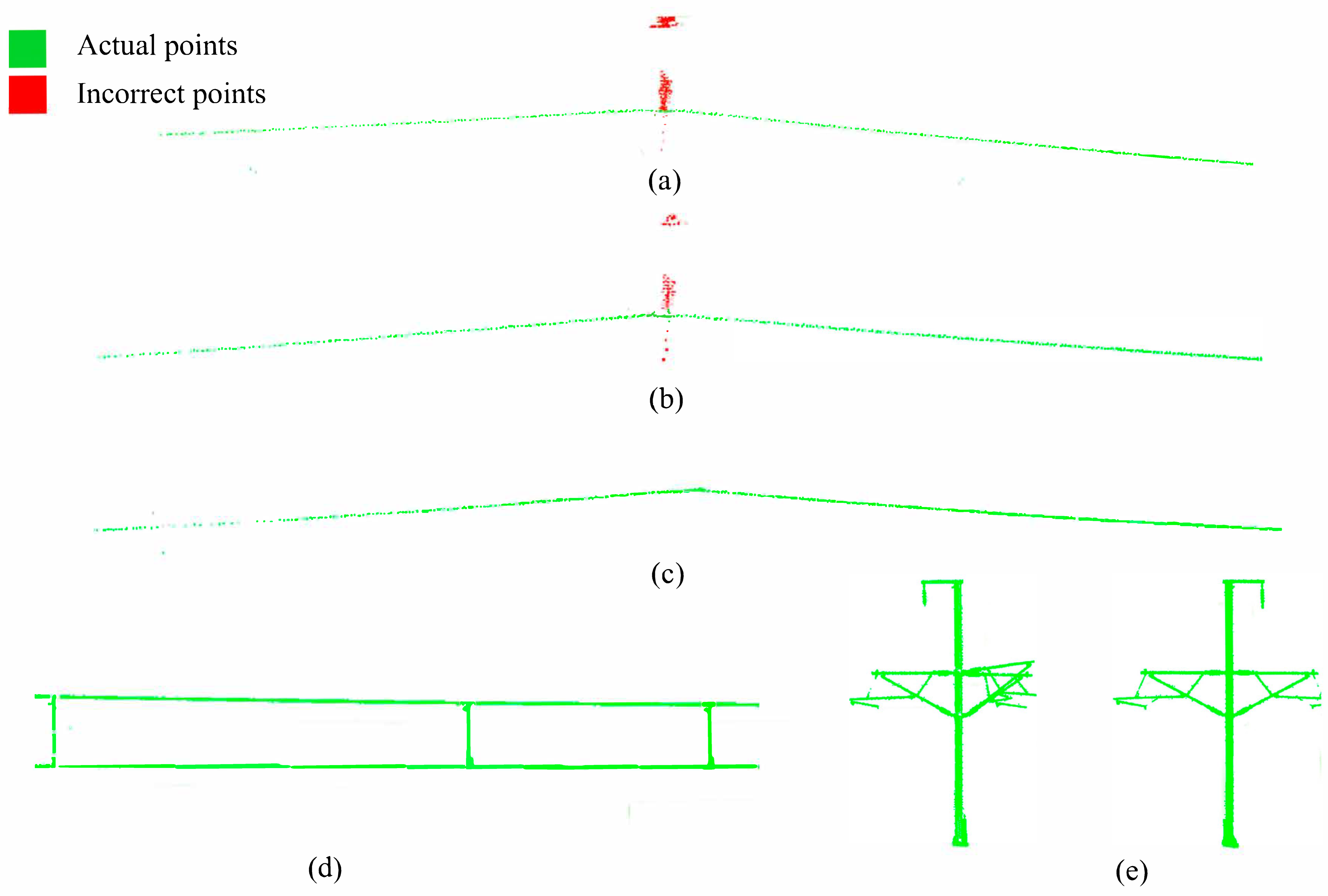
3.3.2. Precise Extraction Method Based on Columnar Search
3.3.3. Precise Extraction Method for Composite Model of Double-Chain Suspension Line
3.4. Performance Validation
3.4.1. Case of Study
3.4.2. Evaluation Method
3.4.3. Results and Analysis
4. Automatic Segmentation Verification
4.1. Data Description
4.2. Deep Learning
4.2.1. Parameter Configuration
4.2.2. Training Data Preprocessing
- (1)
- Down-sampling
- (2)
- Training data generator
- (3)
- Data augmentation
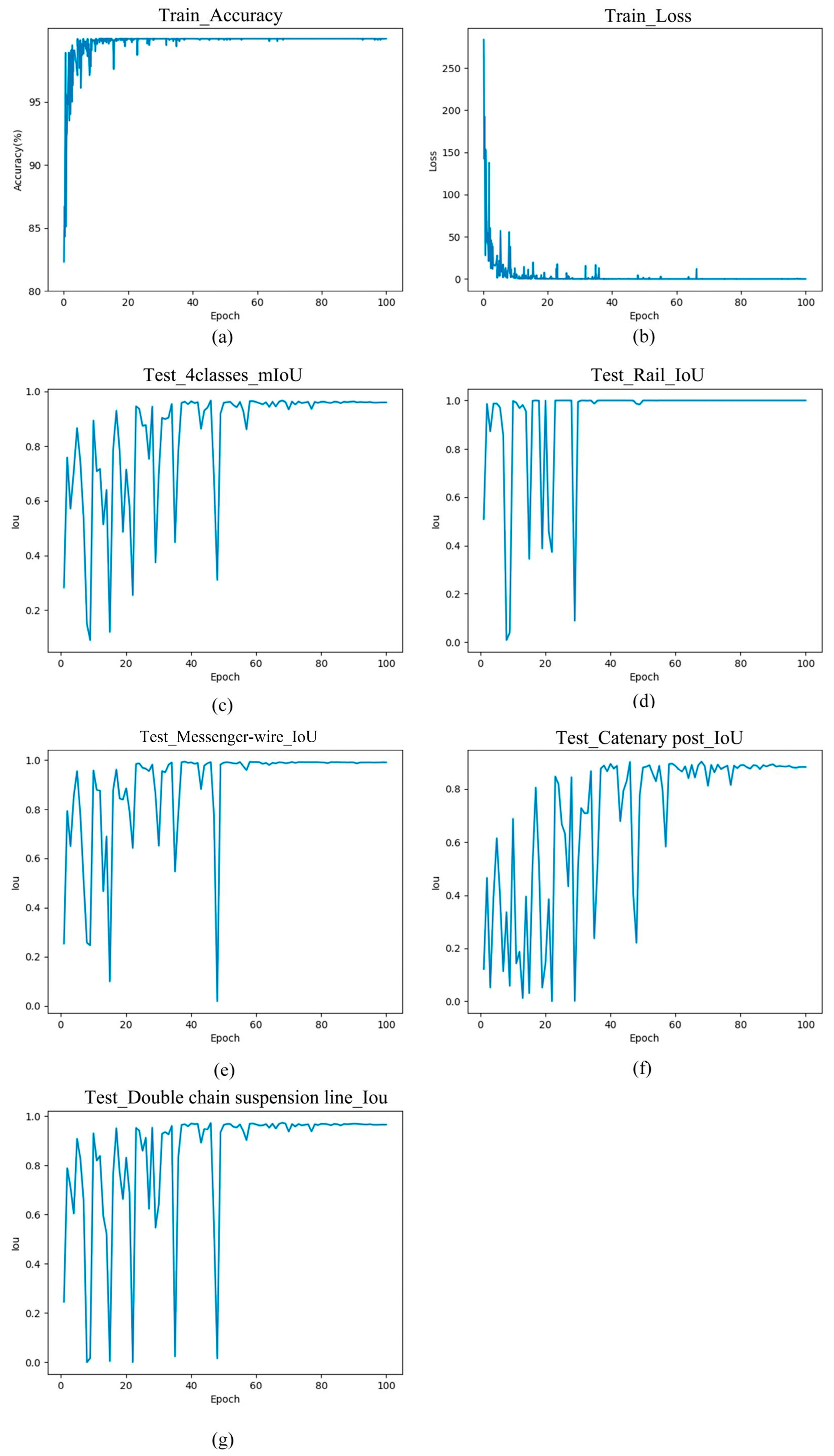
4.2.3. Training Evaluation Parameters
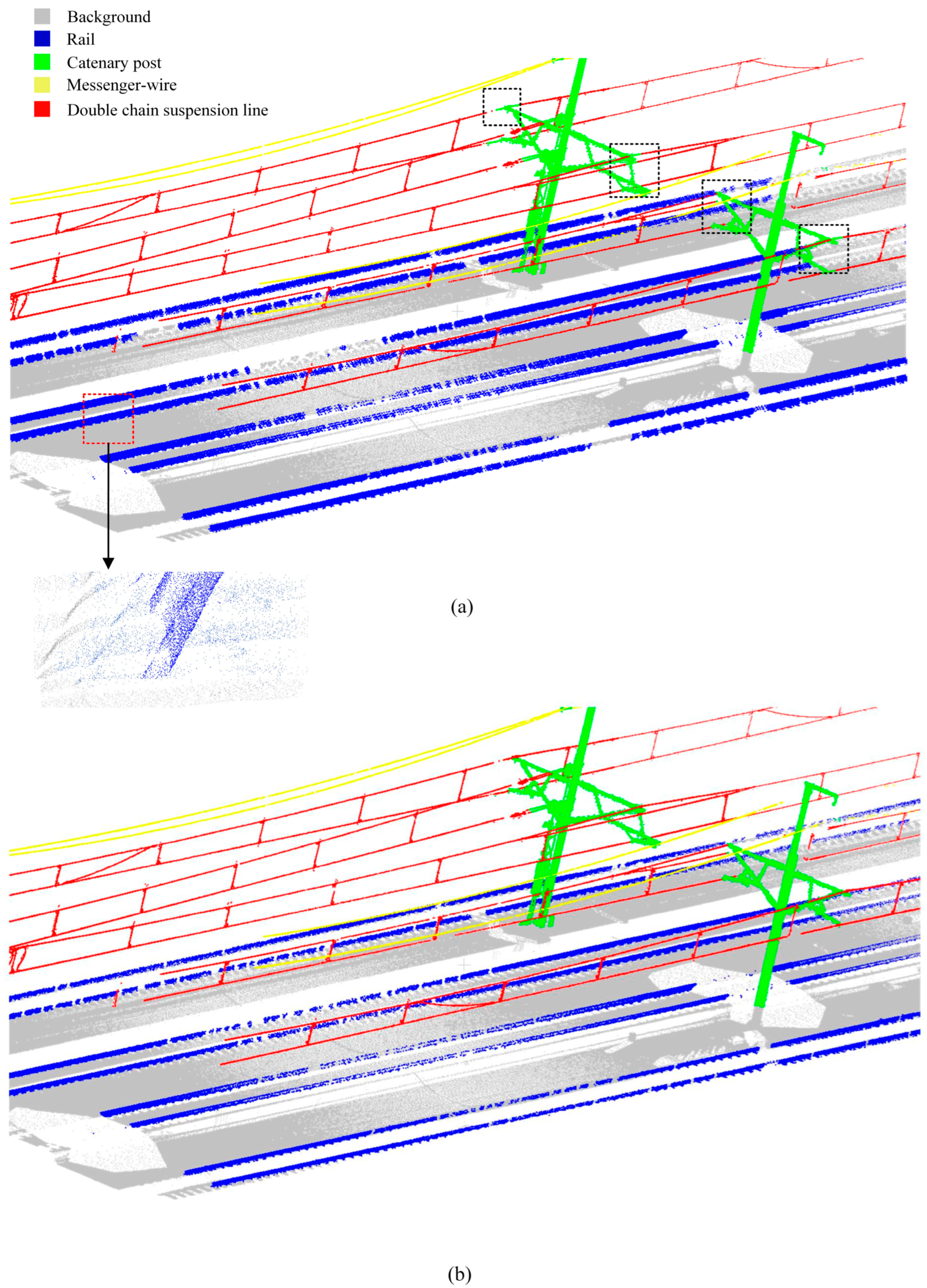
4.2.4. Training and Segmentation
4.3. Conclusions and Analysis
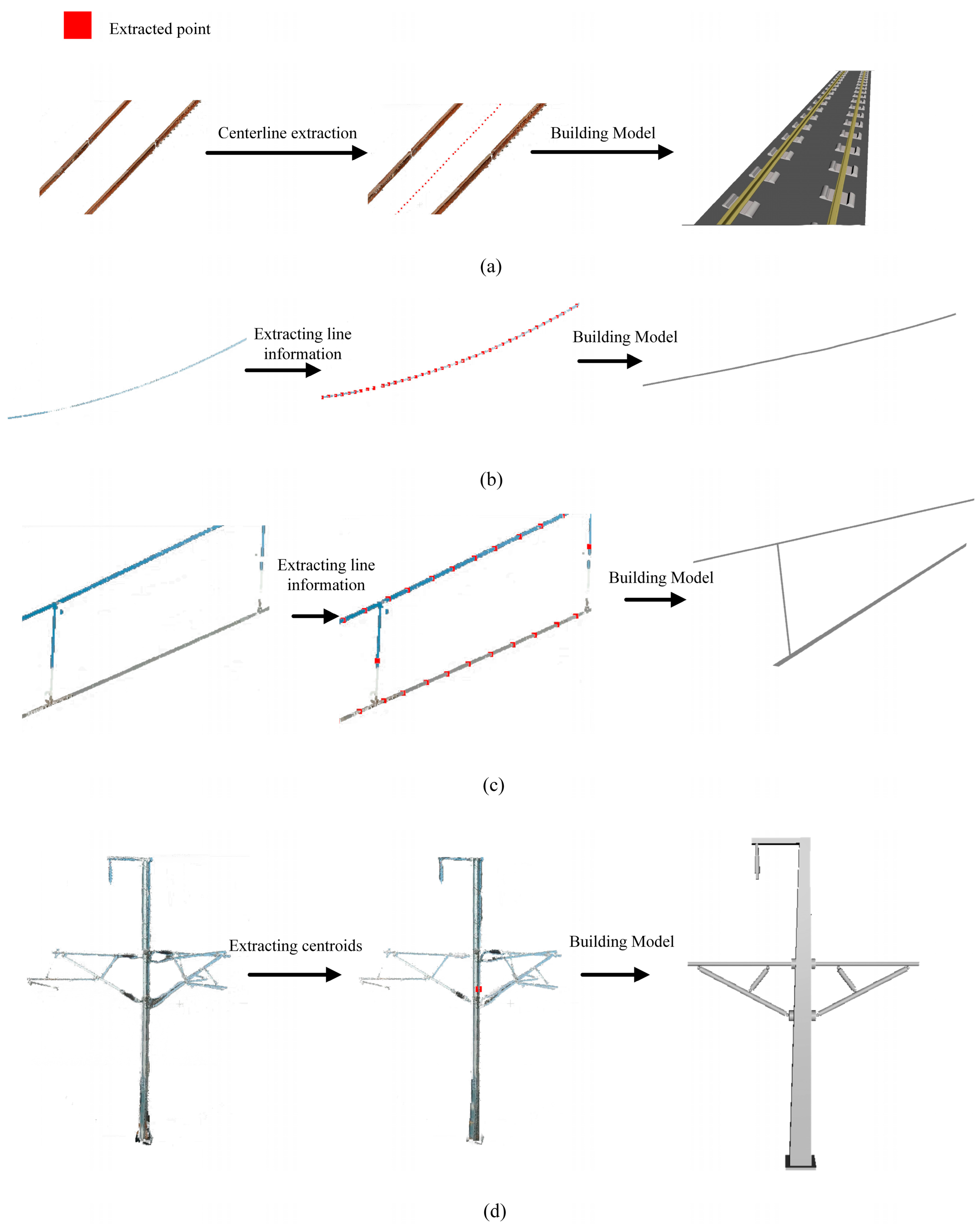
4.4. Model Reconstruction
Parameterization and Modeling of Key Structures
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Haynes, K.E. Impact of high-speed rail on regional economic disparity in China. J. Transp. Geogr. 2017, 65, 80–91. [Google Scholar] [CrossRef]
- Qin, Y. ’No county left behind?’ The distributional impact of high-speed rail upgrades in China. J. Econ. Geogr. 2017, 17, 489–520. [Google Scholar] [CrossRef]
- Chen, Z.; Xue, J.; Rose, A.Z.; Haynes, K.E. The impact of high-speed rail investment on economic and environmental change in China: A dynamic CGE analysis. Transp. Res. Part A Policy Pract. 2016, 92, 232–245. [Google Scholar] [CrossRef]
- Zhu, S.; Cai, C. Interface damage and its effect on vibrations of slab track under temperature and vehicle dynamic loads. Int. J. Non-Linear Mech. 2014, 58, 222–232. [Google Scholar] [CrossRef]
- Zerbst, U.; Lundén, R.; Edel, K.O.; Smith, R.A. Introduction to the damage tolerance behaviour of railway rails—A review. Eng. Fract. Mech. 2009, 76, 2563–2601. [Google Scholar] [CrossRef]
- Bian, J.; Gu, Y.; Murray, M.H. A dynamic wheel-rail impact analysis of railway track under wheel flat by finite element analysis. Veh. Syst. Dyn. 2013, 51, 784–797. [Google Scholar] [CrossRef]
- Yin, J.; Tang, T.; Yang, L.; Xun, J.; Huang, Y.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. Part C Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Ghofrani, F.; He, Q.; Goverde, R.M.P.; Liu, X. Recent applications of big data analytics in railway transportation systems: A survey. Transp. Res. Part C Emerg. Technol. 2018, 90, 226–246. [Google Scholar] [CrossRef]
- Lidén, T. Railway Infrastructure Maintenance—A Survey of Planning Problems and Conducted Research. Transp. Res. Procedia 2015, 10, 574–583. [Google Scholar] [CrossRef]
- Siebert, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Labonnote, N.; Rønnquist, A.; Manum, B.; Rüther, P. Additive construction: State-of-the-art, challenges and opportunities. Autom. Constr. 2016, 72, 347–366. [Google Scholar] [CrossRef]
- Budroni, A.; Böhm, J. Toward automatic reconstruction of interiors from laser data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009. [Google Scholar]
- Dell’Acqua, G.; De Oliveira, S.G.; Biancardo, S.A. Railway-BIM: Analytical review, data standard and overall perspective. Ing. Ferrov. 2018, 73, 901–923. [Google Scholar]
- Macher, H.; Landes, T.; Grussenmeyer, P. From point clouds to building information models: 3D semi-automatic reconstruction of indoors of existing buildings. Appl. Sci. 2017, 7, 1030. [Google Scholar] [CrossRef]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef]
- Yang, X.; del Rey Castillo, E.; Zou, Y.; Wotherspoon, L.; Tan, Y. Automated semantic segmentation of bridge components from large-scale point clouds using a weighted superpoint graph. Autom. Constr. 2022, 142, 104519. [Google Scholar] [CrossRef]
- Kim, M.; Lee, D.; Kim, T.; Oh, S.; Cho, H. Automated extraction of geometric primitives with solid lines from unstructured point clouds for creating digital buildings models. Autom. Constr. 2023, 145, 104642. [Google Scholar] [CrossRef]
- Wang, J.; Sun, W.; Shou, W.; Wang, X.; Wu, C.; Chong, H.Y.; Liu, Y.; Sun, C. Integrating BIM and LiDAR for Real-Time Construction Quality Control. J. Intell. Robot. Syst. Theory Appl. 2015, 79, 417–432. [Google Scholar] [CrossRef]
- McKenna, T.; Minehane, M.; O’Keeffe, B.; O’Sullivan, G.; Ruane, K. Bridge information modelling (BrIM) for a listed viaduct. In Proceedings of the Institution of Civil Engineers: Bridge Engineering; Thomas Telford Ltd.: London, UK, 2017; pp. 192–203. [Google Scholar]
- Tchana, Y.; Ducellier, G.; Remy, S. Designing a unique Digital Twin for linear infrastructures lifecycle management. Procedia CIRP 2019, 84, 545–549. [Google Scholar]
- Abdal Noor, B.; Yi, S. Review of BIM literature in construction industry and transportation: Meta-analysis. Constr. Innov. 2018, 18, 433–452. [Google Scholar] [CrossRef]
- Cheng, Y.-J.; Qiu, W.-G.; Duan, D.-Y. Automatic creation of as-is building information model from single-track railway tunnel point clouds. Autom. Constr. 2019, 106, 102911. [Google Scholar] [CrossRef]
- Carnevali, L.; Lanfranchi, F.; Russo, M. Built information modeling for the 3d reconstruction of modern railway stations. Heritage 2019, 2, 2298–2310. [Google Scholar] [CrossRef]
- Neves, J.; Sampaio, Z.; Vilela, M. A case study of BIM implementation in rail track rehabilitation. Infrastructures 2019, 4, 8. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Lian, Q. Digital twin aided sustainability-based lifecycle management for railway turnout systems. J. Clean. Prod. 2019, 228, 1537–1551. [Google Scholar] [CrossRef]
- Panah, R.S.; Kioumarsi, M. Application of building information modelling (BIM) in the health monitoring and maintenance process: A systematic review. Sensors 2021, 21, 837. [Google Scholar] [CrossRef] [PubMed]
- Ji, C.; Sun, H.; Zhong, R.; Li, J.; Han, Y. Precise Positioning Method of Moving Laser Point Cloud in Shield Tunnel Based on Bolt Hole Extraction. Remote Sens. 2022, 14, 4791. [Google Scholar] [CrossRef]
- Sánchez-Rodríguez, A.; Riveiro, B.; Soilán, M.; González-deSantos, L.M. Automated detection and decomposition of railway tunnels from Mobile Laser Scanning Datasets. Autom. Constr. 2018, 96, 171–179. [Google Scholar] [CrossRef]
- Ramezani, M.; Wang, Y.; Camurri, M.; Wisth, D.; Mattamala, M.; Fallon, M. The newer college dataset: Handheld LiDAR, inertial and vision with ground truth. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 25–29 October 2020; pp. 4353–4360. [Google Scholar]
- Sammartano, G.; Spanò, A. Point clouds by SLAM-based mobile mapping systems: Accuracy and geometric content validation in multisensor survey and stand-alone acquisition. Appl. Geomat. 2018, 10, 317–339. [Google Scholar] [CrossRef]
- Vignali, V.; Acerra, E.M.; Lantieri, C.; Di Vincenzo, F.; Piacentini, G.; Pancaldi, S. Building information Modelling (BIM) application for an existing road infrastructure. Autom. Constr. 2021, 128, 103752. [Google Scholar] [CrossRef]
- Al-Adhamia, M.; Roobleb, S.; Wuc, S.; Osuna-Yevenesb, C.; Ruby-Lewisb, V.; Greatrixb, M.; Cartagenaa, Y.; Talebi, S. An automated approach to digitise railway bridges. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction, ISARC 2020: From Demonstration to Practical Use—To New Stage of Construction Robot, Kitakyushu, Japan, 27–28 October 2020; pp. 962–968. [Google Scholar]
- Ariyachandra, M.R.M.F.; Brilakis, I. Digital twinning of railway overhead line equipment from airborne lidar data. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction, ISARC 2020: From Demonstration to Practical Use—To New Stage of Construction Robot, Kitakyushu, Japan, 27–28 October 2020; pp. 1270–1277. [Google Scholar]
- Weidner, L.; Walton, G.; Kromer, R. Classification methods for point clouds in rock slope monitoring: A novel machine learning approach and comparative analysis. Eng. Geol. 2019, 263, 105326. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Zhong, Y.; Zheng, Z.; Liu, Y.; Zhao, J.; Ma, A.; Yang, J. Multi-Scale and Multi-Task Deep Learning Framework for Automatic Road Extraction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9362–9377. [Google Scholar] [CrossRef]
- Chen, J.; Lei, B.; Song, Q.; Ying, H.; Chen, D.Z.; Wu, J. A Hierarchical Graph Network for 3D Object Detection on Point Clouds. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 389–398. [Google Scholar]
- Xu, M.; Ding, R.; Zhao, H.; Qi, X. PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 3172–3181. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5100–5109. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep learning on point sets for 3D classification and segmentation. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, Hawaii, 21–26 July 2017; pp. 77–85. [Google Scholar]
- Hu, Q.; Yang, B.; Xie, L.; Rosa, S.; Guo, Y.; Wang, Z.; Trigoni, N.; Markham, A. Randla-Net: Efficient semantic segmentation of large-scale point clouds. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 11105–11114. [Google Scholar]
- Hamraz, H.; Jacobs, N.B.; Contreras, M.A.; Clark, C.H. Deep learning for conifer/deciduous classification of airborne LiDAR 3D point clouds representing individual trees. ISPRS J. Photogramm. Remote Sens. 2019, 158, 219–230. [Google Scholar] [CrossRef]
- Wu, B.; Zhou, X.; Zhao, S.; Yue, X.; Keutzer, K. SqueezeSegV2: Improved model structure and unsupervised domain adaptation for road-object segmentation from a LiDAR point cloud. In Proceedings of the IEEE International Conference on Robotics and Automation, Montreal, QC, Canada, 20–24 May 2019; pp. 4376–4382. [Google Scholar]
- Pan, Z.; Liang, Y.; Wang, W.; Yu, Y.; Zheng, Y.; Zhang, J. Urban traffic prediction from spatio-temporal data using deep meta learning. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 1720–1730. [Google Scholar]
- Caltagirone, L.; Bellone, M.; Svensson, L.; Wahde, M. LIDAR–camera fusion for road detection using fully convolutional neural networks. Robot. Auton. Syst. 2019, 111, 125–131. [Google Scholar] [CrossRef]
- Moyano, J.; Gil-Arizón, I.; Nieto-Julián, J.E.; Marín-García, D. Analysis and management of structural deformations through parametric models and HBIM workflow in architectural heritage. J. Build. Eng. 2022, 45, 103274. [Google Scholar] [CrossRef]
- Software, Dynamo BIM; Autodesk: San Rafael, CA, USA.
- Soilán, M.; Nóvoa, A.; Sánchez-Rodríguez, A.; Justo, A.; Riveiro, B. Fully automated methodology for the delineation of railway lanes and the generation of IFC alignment models using 3D point cloud data. Autom. Constr. 2021, 126, 103684. [Google Scholar] [CrossRef]
- Streiff, D.; Bernreiter, L.; Tschopp, F.; Fehr, M.; Siegwart, R. 3D3L: Deep Learned 3D keypoint Detection and Description for Lidars. In Proceedings of the IEEE International Conference on Robotics and Automation, Xi’an, China, 5 June 2021; pp. 13064–13070. [Google Scholar]
- Rabbani, T.; Van Den Heuvel, F.A.; Vosselman, G. Segmentation of point clouds using smoothness constraint. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 248–253. [Google Scholar]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Vo, A.V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Chen, C.; Chang, B.; Li, Y.; Shi, B. Filtering airborne LiDAR point clouds based on a scale-irrelevant and terrain-adaptive approach. Measurement 2021, 171, 108756. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Yan, G.; Shao, J. Filtering Airborne LiDAR Data Through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef]
- Oniga, V.-E.; Breaban, A.-I.; Pfeifer, N.; Diac, M. 3D Modeling of Urban Area Based on Oblique UAS Images—An End-to-End Pipeline. Remote Sens. 2022, 14, 422. [Google Scholar] [CrossRef]
- Viedma, O. Applying a Robust Empirical Method for Comparing Repeated LiDAR Data with Different Point Density. Forests 2022, 13, 380. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Lidmila, M.; Kolář, V.; Křemen, T. Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge. Remote Sens. 2021, 13, 3050. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, J.; Deng, K.; Liu, Z.; Shi, Q. A new power-line extraction method based on airborne LiDAR point cloud data. In Proceedings of the 2011 International Symposium on Image and Data Fusion, ISIDF 2011, Tengchong, China, 9–11 August 2011. [Google Scholar]
- Yadav, M.; Chousalkar, C.G. Extraction of power lines using mobile LiDAR data of roadway environment. Remote Sens. Appl. Soc. Environ. 2017, 8, 258–265. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Kukko, A.; Matikainen, L.; Hyyppä, J.; Kaartinen, H.; Jaakkola, A. Power line mapping technique using all-terrain mobile laser scanning. Autom. Constr. 2019, 105, 102802. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, C.; Tian, S.; Lu, B.; Zhang, L.; Ning, X.; Bai, X. Deep learning-based 3D point cloud classification: A systematic survey and outlook. Displays 2023, 79, 102456. [Google Scholar] [CrossRef]
- Hamdi, A.; Giancola, S.; Ghanem, B. MVTN: Multi-View Transformation Network for 3D Shape Recognition. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2021; pp. 1–11. [Google Scholar]
- Wang, L.; Huang, Y.; Shan, J.; He, L. MSNet: Multi-Scale Convolutional Network for Point Cloud Classification. Remote Sens. 2018, 10, 612. [Google Scholar] [CrossRef]
- Bai, Q.; Lindenbergh, R.C.; Vijverberg, J.; Guelen, J.A.P. Road Type Classification of Mls Point Clouds Using Deep Learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 115–122. [Google Scholar] [CrossRef]
- Balado, J.; Martínez-Sánchez, J.; Arias, P.; Novo, A. Road environment semantic segmentation with deep learning from mls point cloud data. Sensors 2019, 19, 3466. [Google Scholar] [CrossRef]
- Grandio, J.; Riveiro, B.; Soilán, M.; Arias, P. Point cloud semantic segmentation of complex railway environments using deep learning. Autom. Constr. 2022, 141, 104425. [Google Scholar] [CrossRef]
- Ariyachandra, M.R.M.F.; Brilakis, I. Detection of Railway Masts in Airborne LiDAR Data. J. Constr. Eng. Manag. 2020, 146, 04020105. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Lampinen, J.; Kaartinen, H.; Kukko, A.; Puttonen, E.; Hyyppä, H. Object Classification and Recognition From Mobile Laser Scanning Point Clouds in a Road Environment. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1226–1239. [Google Scholar] [CrossRef]
- Car, M.; Markovic, L.; Ivanovic, A.; Orsag, M.; Bogdan, S. Autonomous Wind-Turbine Blade Inspection Using LiDAR-Equipped Unmanned Aerial Vehicle. IEEE Access 2020, 8, 131380–131387. [Google Scholar] [CrossRef]
- GitHub. Software. CloudCompare (Version 2.12.2). 2022. Available online: https://github.com/cloudcompare/cloudcompare (accessed on 2 August 2023).
- Dong, Z.; Liang, F.; Yang, B.; Xu, Y.; Zang, Y.; Li, J.; Wang, Y.; Dai, W.; Fan, H.; Hyyppäb, J.; et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 163, 327–342. [Google Scholar] [CrossRef]
- Monszpart, A.; Mellado, N.; Brostow, G.J.; Mitra, N.J. RAPter: Rebuilding man-made scenes with regular arrangements of planes. In Proceedings of the ACM Transactions on Graphics, Los Angeles, CA, USA, 9–13 August 2015. [Google Scholar]
- Soilán, M.; Nóvoa, A.; Sánchez-Rodríguez, A.; Riveiro, B.; Arias, P. Semantic Segmentation of Point Clouds with Pointnet and Kpconv Architectures Applied To Railway Tunnels. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 2, 281–288. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene | Length (m) | Total Points (Million) | Point Density ) | Range Precision |
|---|---|---|---|---|
| A | 2000 | 137.28 | 297.54 | ±3 cm |
| B | 450 | 29.73 | 3366 | — |
| Scene | K | Detail Scene | Outlier Points Recognized by Manual Operation | Outlier Points Recognized by Algorithm | Denoising Rate (%) | ||
|---|---|---|---|---|---|---|---|
| A | 0.1295 | 0.0137 | 141 | Ground | 371,955 | 347,034 | 93.3 |
| Over Line | 16,609 | 14,881 | 89.6 | ||||
| B | 0.1273 | 0.0499 | 17 | Ground | 734,654 | 702,329 | 95.6 |
| Over Line | 65,413 | 60,899 | 93.1 |
| Methods | Parameters | Stage 1 | Stage 2 | Scene | Classification | IoU | Runtime (s) |
|---|---|---|---|---|---|---|---|
| CSF | GR | 2 | A | Overhead lines | 0.9699 | 2.1 | |
| Rigidness | 1 | 3 | Rails | 0.5258 | |||
| H (m) | 1 | 0.176 | B | Overhead lines | 0.9736 | 1.6 | |
| dT (m) | 1 | 0.058 | Rails | 0.7004 | |||
| PMF | Rs (m) | 1.5 | 1.5 | A | Overhead lines | 0.9616 | 79,089.7 |
| MaxS | 0.2 | 0.1 | Rails | — | |||
| MaxW (m) | 5 | 5 | B | Overhead lines | 0.9845 | 106,522.3 | |
| Et (m) | 0.4 | 0.4 | Rails | 0.7032 | |||
| Es | 0.4 | 0.1 |
| Scene | Runtime (s) | IoU Previous | IoU after |
|---|---|---|---|
| A | 15.4 | 0.5258 | 0.8814 |
| B | 71.9 | 0.7004 | 0.9613 |
| Methods | Parameter | Runtime (s) | IoU |
|---|---|---|---|
| PCA | 0.6 | 26.6 | 0.9283 |
| +RANSAC | D 0.1 | +6.0 | 0.9302 |
| +Columnar search | +6.6 | 0.9981 |
| Scene | Total Points | Background | Rails | Catenary Post | Messenger-Wire | Double Chain Suspension Line |
|---|---|---|---|---|---|---|
| Scene A | 29,638,949 | 26,605,500 | 1,838,351 | 471,642 | 165,151 | 558,305 |
| Scene B | 29,009,362 | 22,731,479 | 3,791,550 | 1,834,265 | 156,682 | 495,386 |
| Scene | Training Set (m/%) | Test Set (m/%) |
|---|---|---|
| Scene A | 450/22 | 1550/78 |
| Scene B | 90/20 | 360/80 |
| Scene | Ground Data | Train Runtimes (min) | mIoU | Rails | Background | Catenary Post | Messenger-Wire | Double Chain Suspension Line |
|---|---|---|---|---|---|---|---|---|
| Scene A | No | 51 | 0.9518 | 0.9999 | — | 0.9359 | 0.9245 | 0.9471 |
| Yes | 87 | 0.8265 | 0.5117 | 0.8471 | 0.9369 | 0.9318 | 0.9052 | |
| Scene B | No | 59 | 0.9665 | 0.9999 | — | 0.9029 | 0.9900 | 0.9734 |
| Yes | 113 | 0.8303 | 0.7596 | 0.9333 | 0.8183 | 0.9943 | 0.9852 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Su, Q.; Niu, Y.; Zhang, Z.; Liu, J. A Handheld LiDAR-Based Semantic Automatic Segmentation Method for Complex Railroad Line Model Reconstruction. Remote Sens. 2023, 15, 4504. https://doi.org/10.3390/rs15184504
Chen J, Su Q, Niu Y, Zhang Z, Liu J. A Handheld LiDAR-Based Semantic Automatic Segmentation Method for Complex Railroad Line Model Reconstruction. Remote Sensing. 2023; 15(18):4504. https://doi.org/10.3390/rs15184504
Chicago/Turabian StyleChen, Junjie, Qian Su, Yunbin Niu, Zongyu Zhang, and Jinghao Liu. 2023. "A Handheld LiDAR-Based Semantic Automatic Segmentation Method for Complex Railroad Line Model Reconstruction" Remote Sensing 15, no. 18: 4504. https://doi.org/10.3390/rs15184504
APA StyleChen, J., Su, Q., Niu, Y., Zhang, Z., & Liu, J. (2023). A Handheld LiDAR-Based Semantic Automatic Segmentation Method for Complex Railroad Line Model Reconstruction. Remote Sensing, 15(18), 4504. https://doi.org/10.3390/rs15184504