



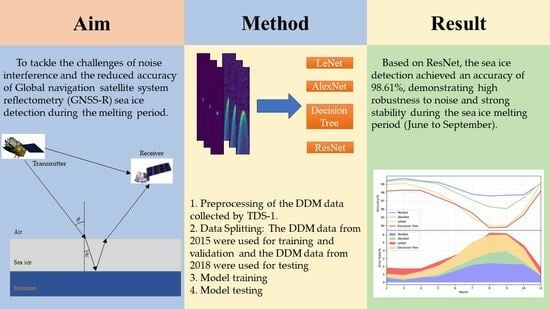
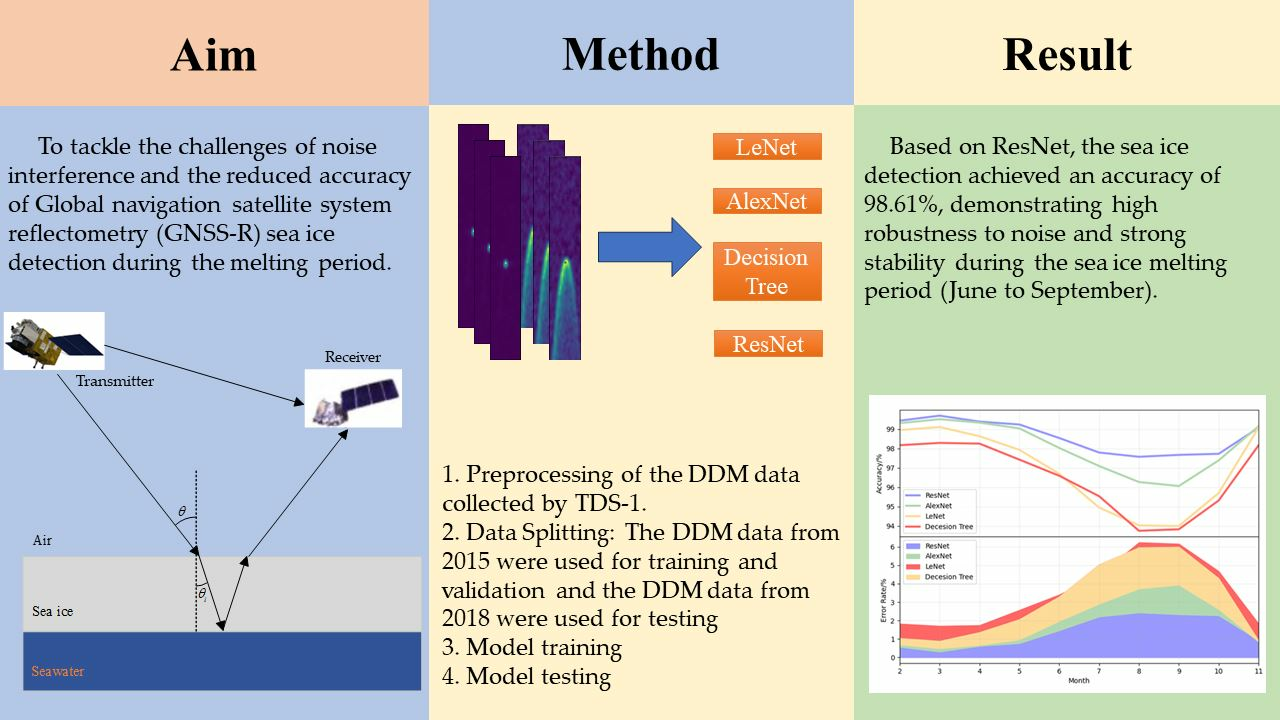
Sea Ice Detection from GNSS-R Data Based on Residual Network


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data Description
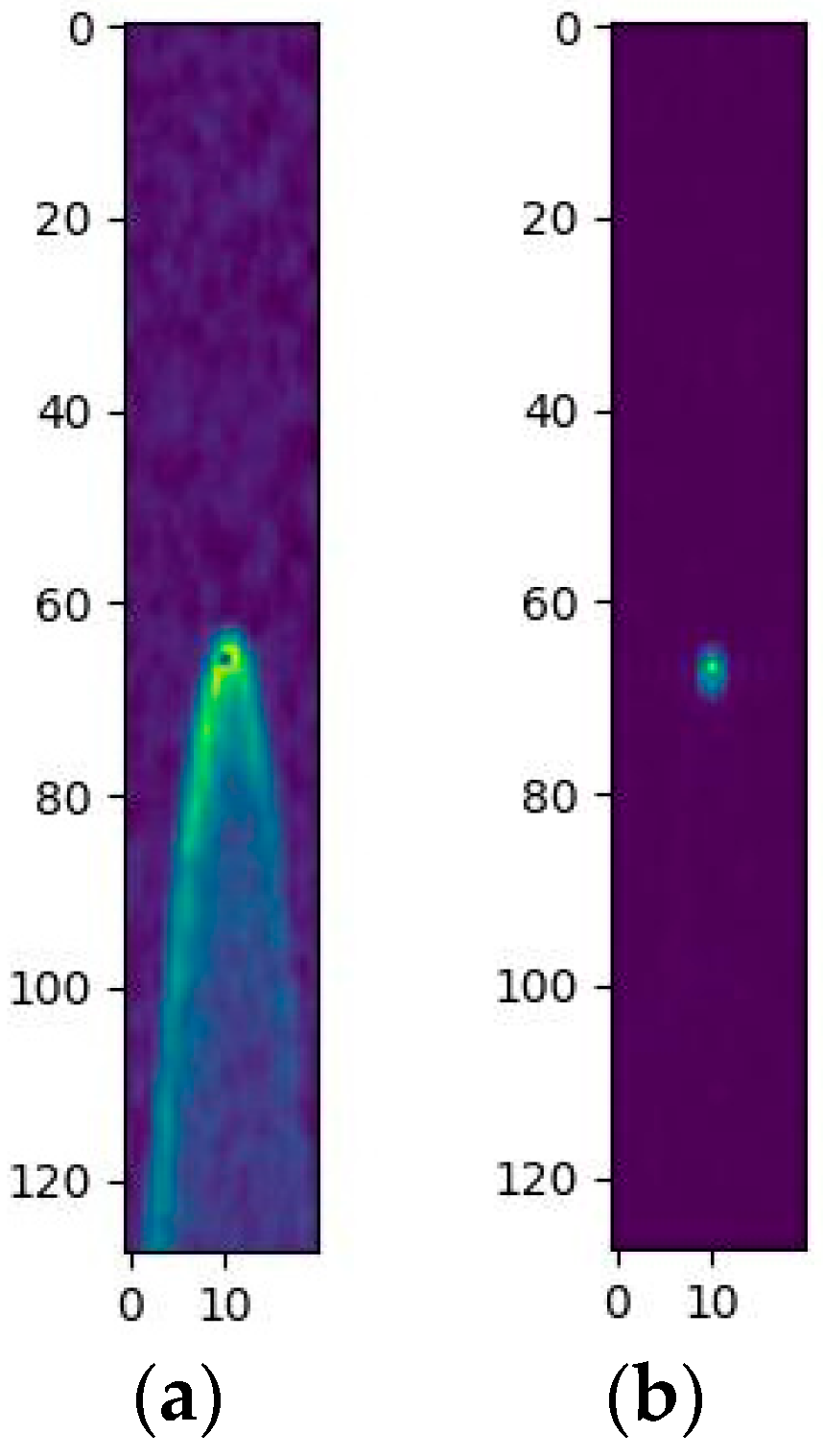
2.1.1. GNSS-R DDM Data
2.1.2. Ground Truth Data
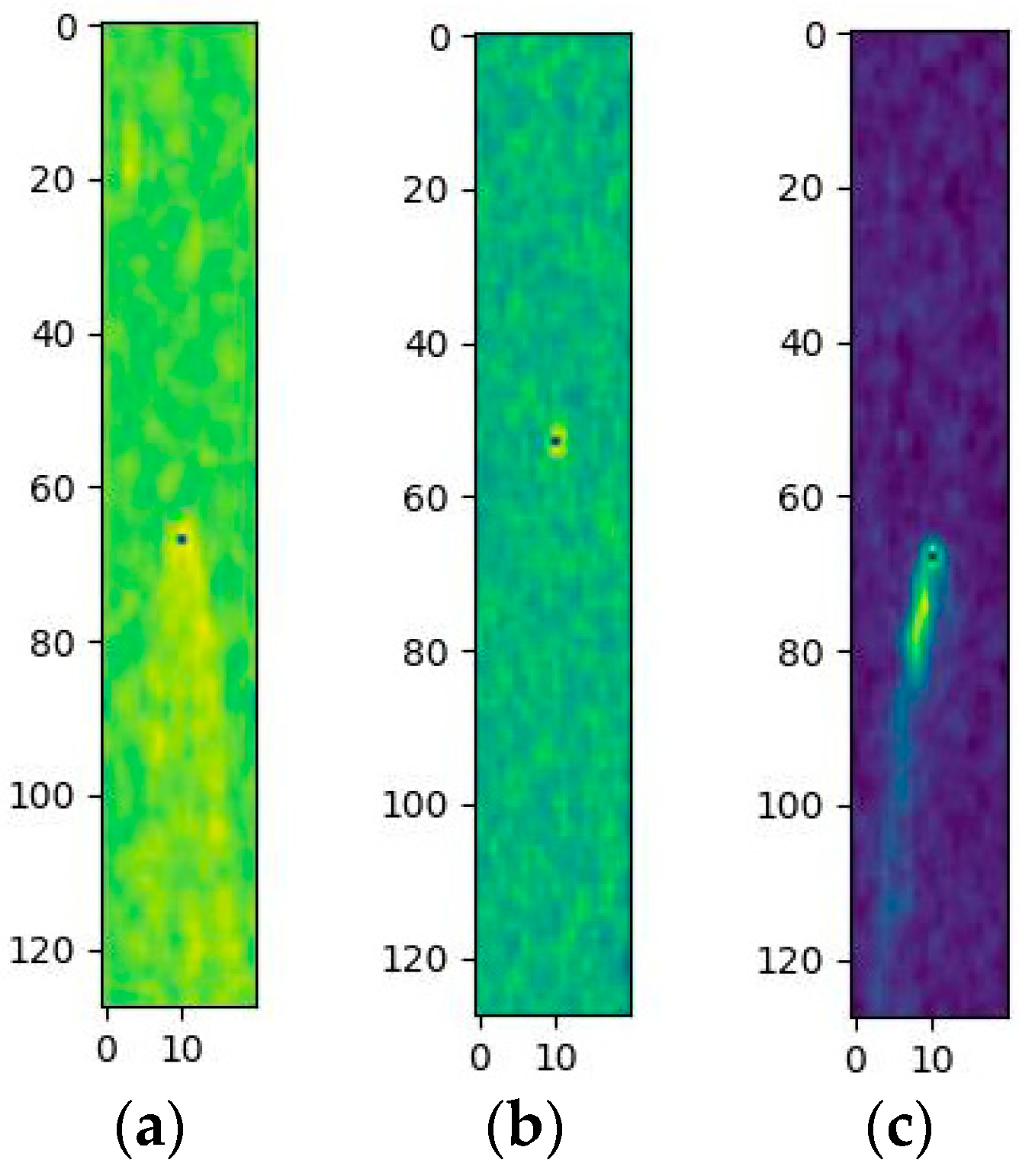
2.1.3. DDM Data Preprocessing
2.2. Convolutional Neural Network Algorithm
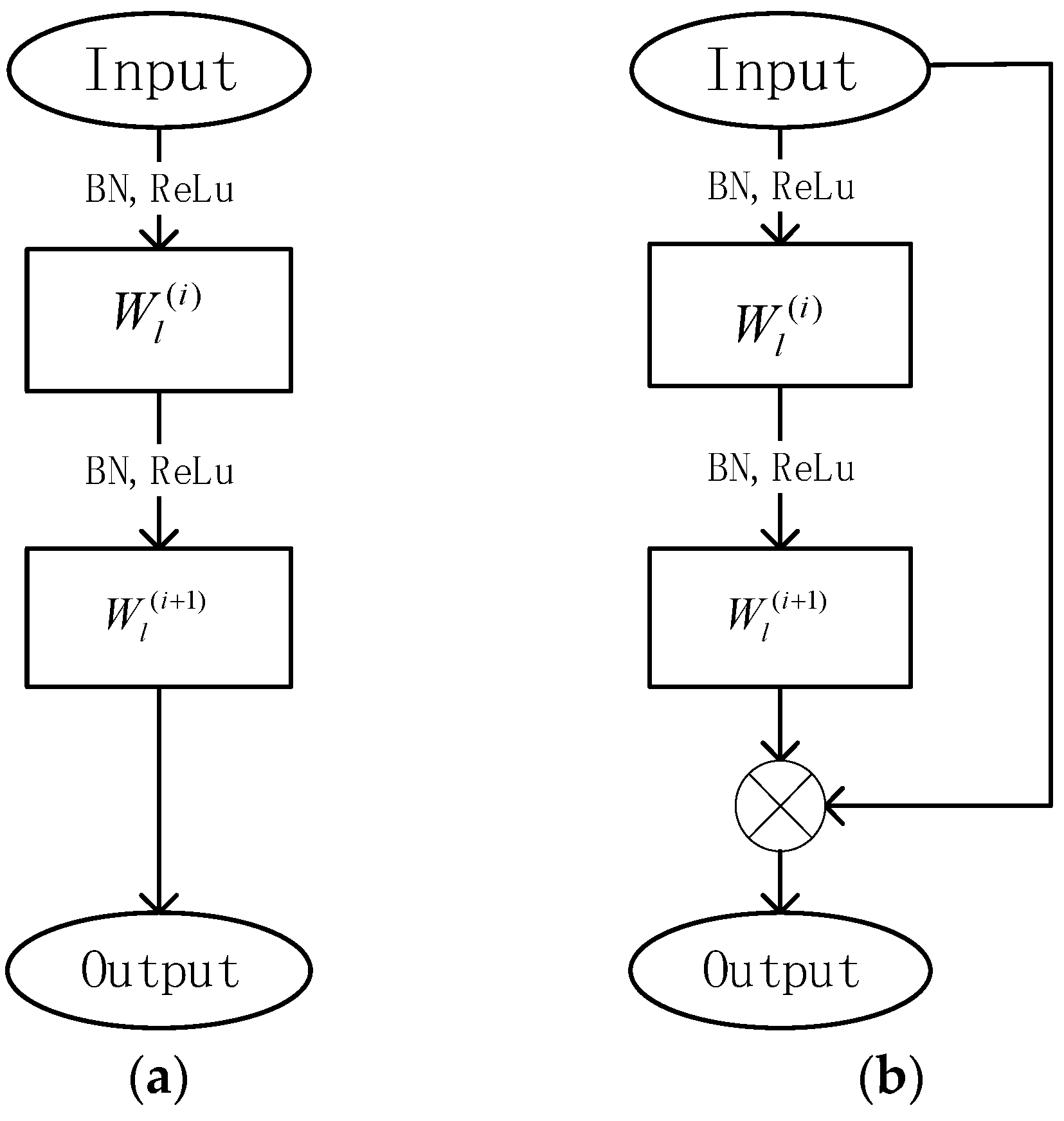
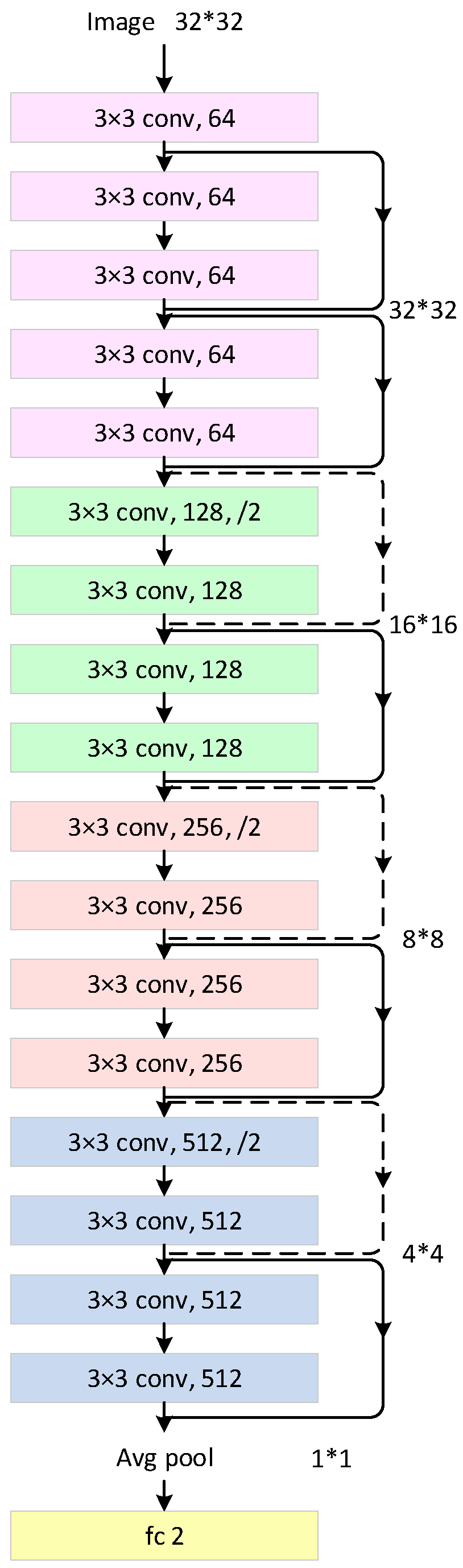
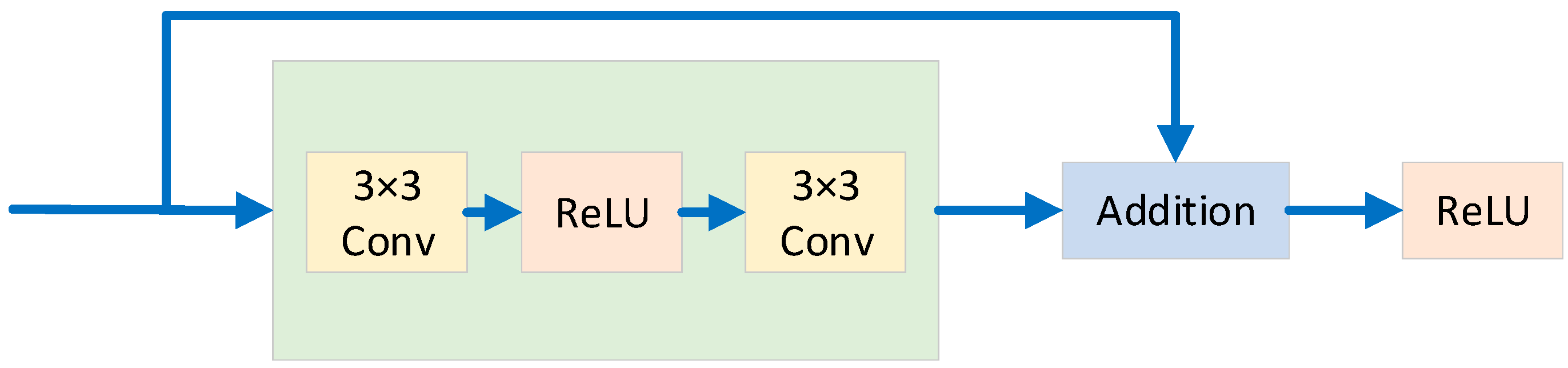
2.2.1. ResNet Algorithm
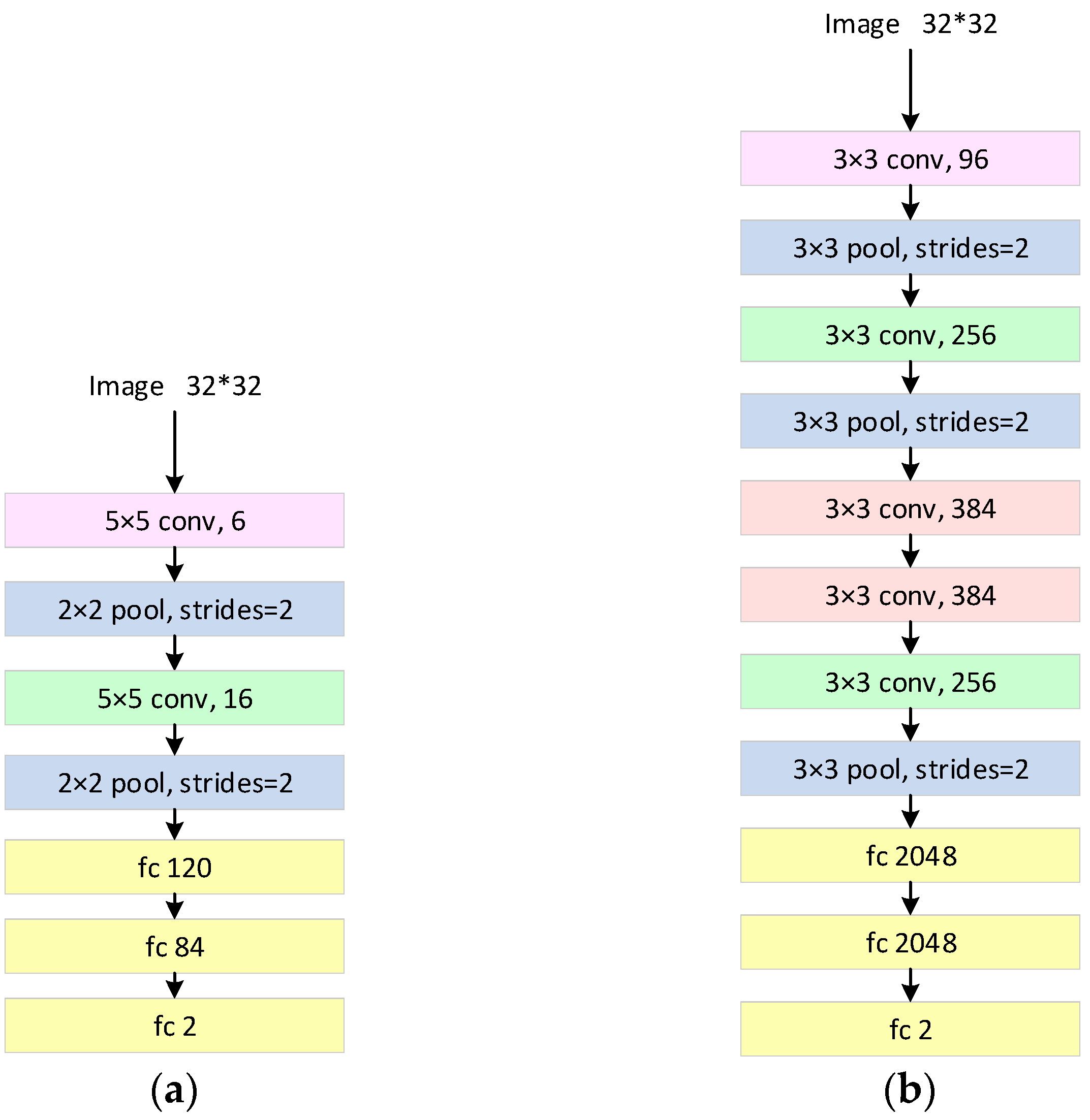
2.2.2. LeNet Algorithm
2.2.3. AlexNet Algorithm
2.3. Training of the CNN
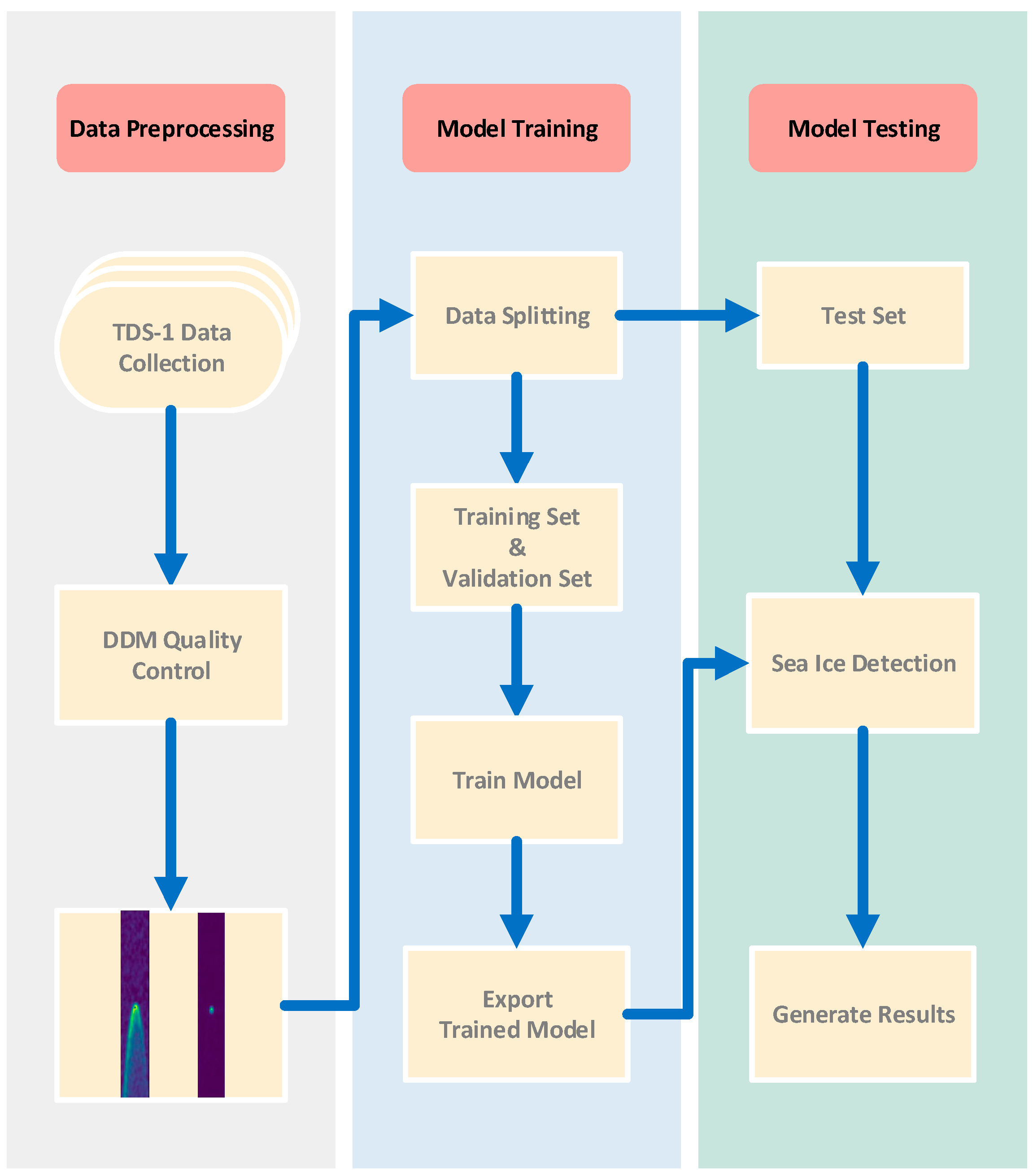
2.4. Process of GNSS-R Sea Ice Detection
- Preprocessing of the DDM data collected by TDS-1.
- After filtering the data, the DDM data from 2015 were used for training and validation and the DDM data from 2018 were used for testing. The data from 2015 were further divided into a training set and a validation set in a ratio of 7:3.
- The test set were tested using the best model to generate sea ice detection results and obtain detection accuracy.
3. Experiments
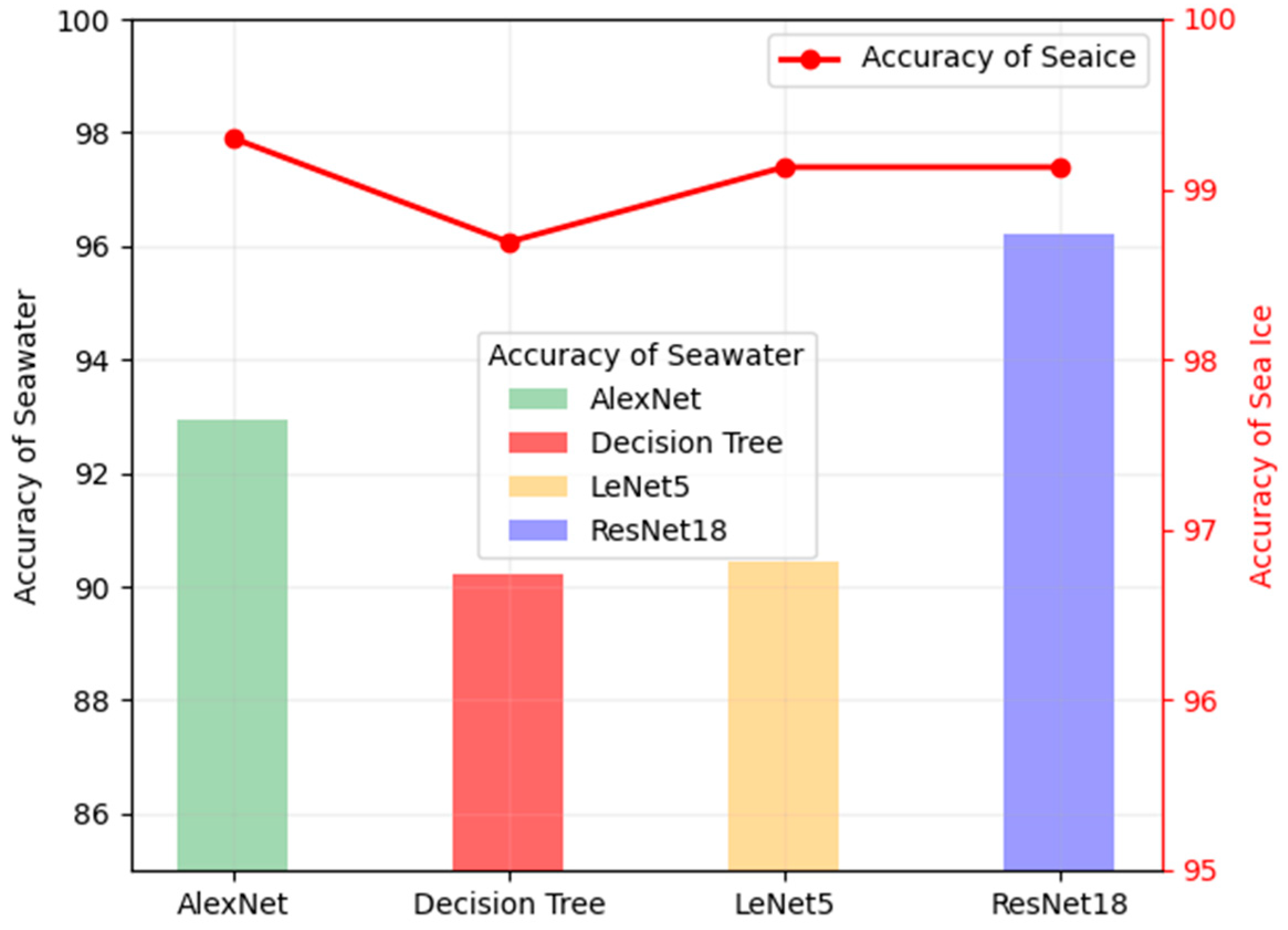
3.1. Results with Accuracy
- True Positive (TP): the prediction is positive and the result is correct.
- False Positive (FP): the prediction is positive and the predicted result is incorrect.
- True Negative (TN): the prediction is negative and the predicted result is correct.
- False Negative (FN): the prediction is negative and the result is wrong.
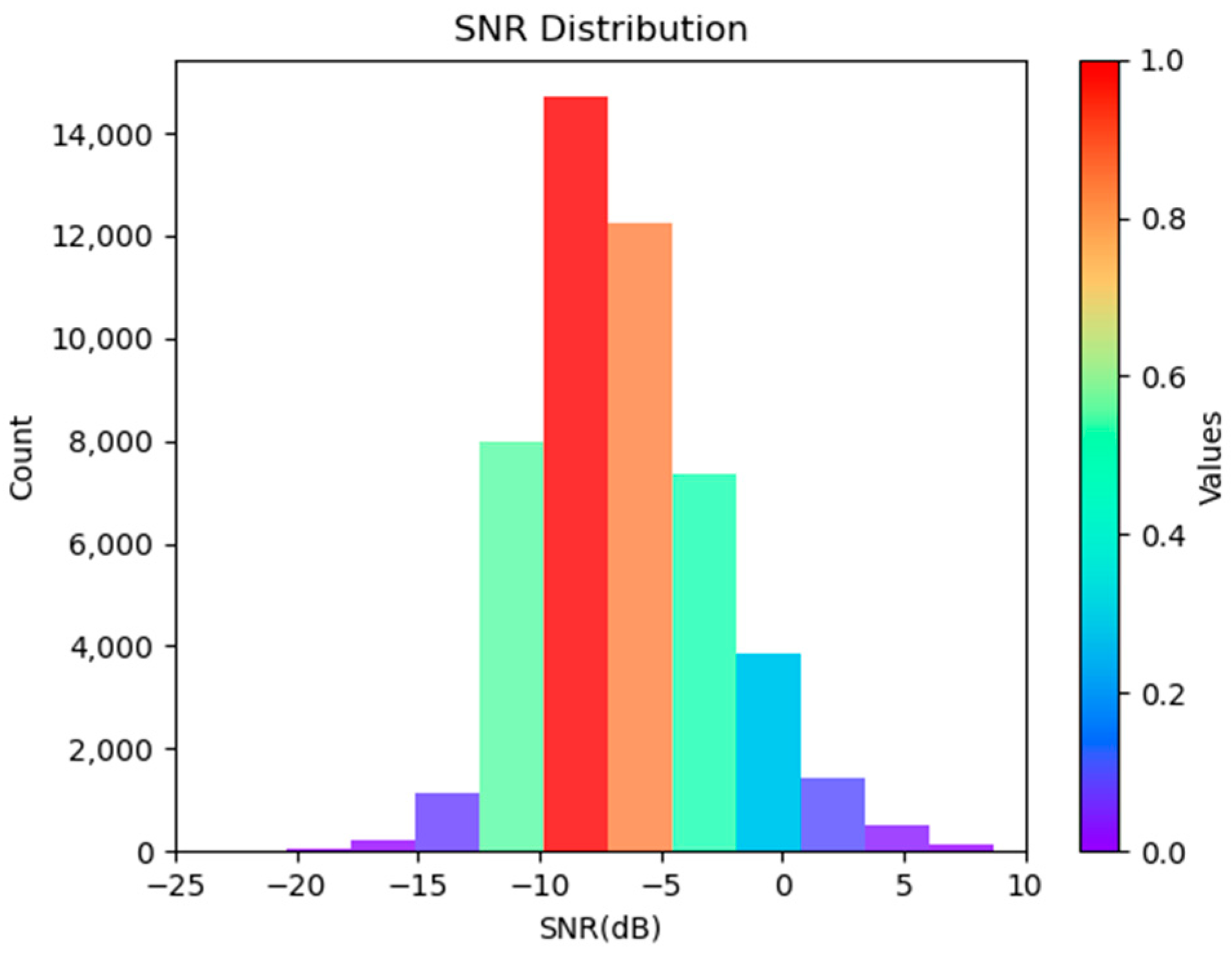
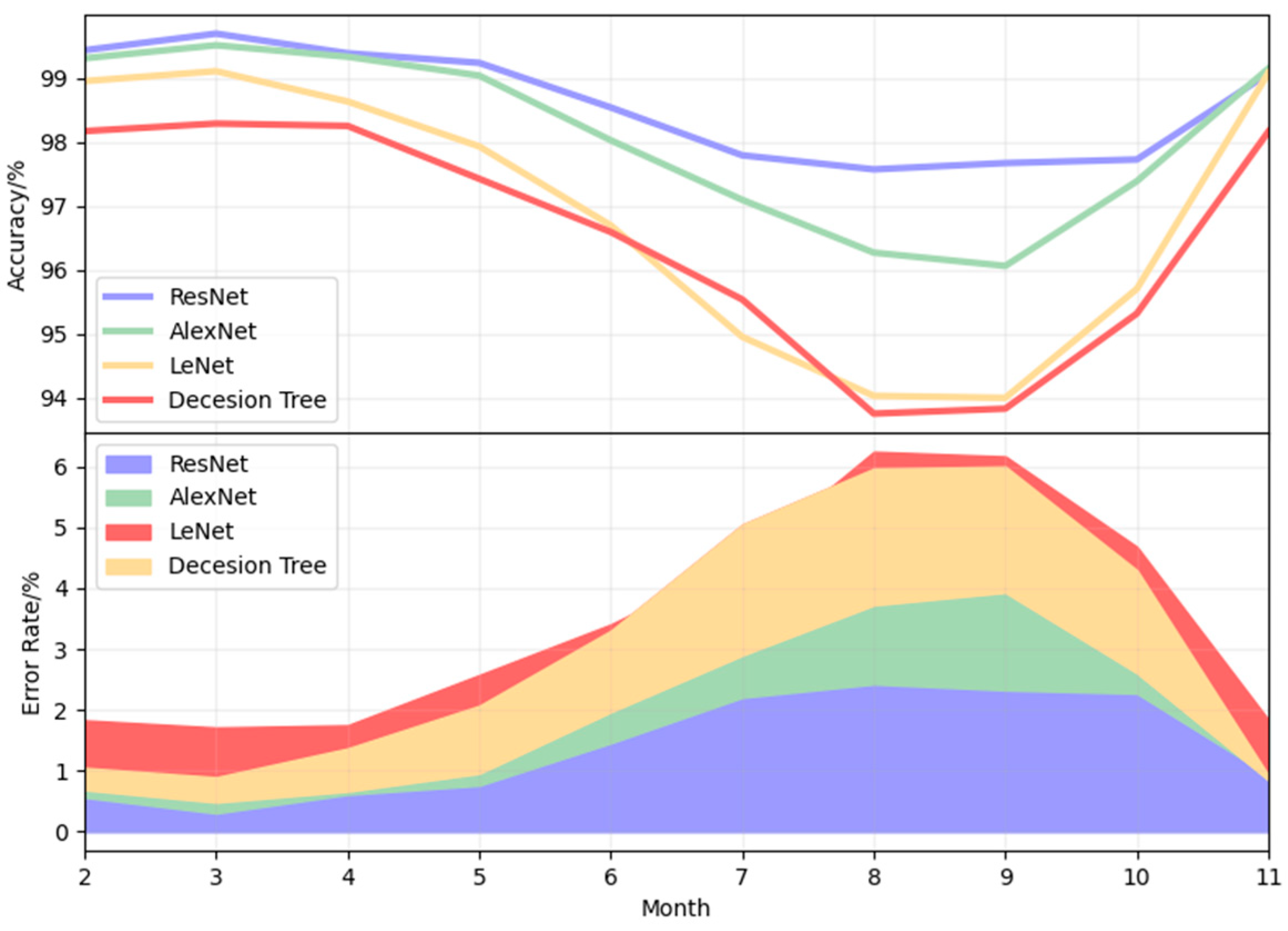
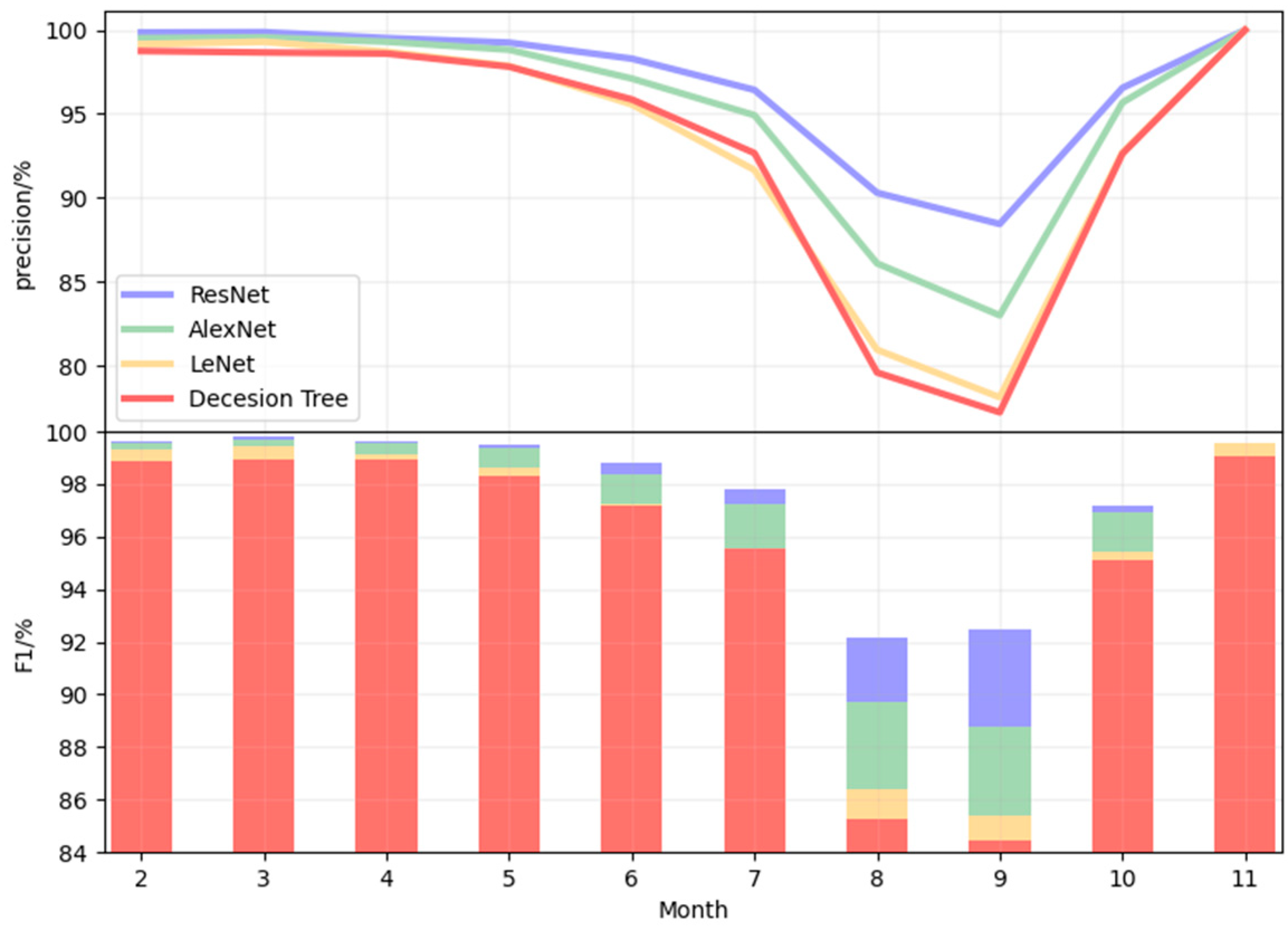
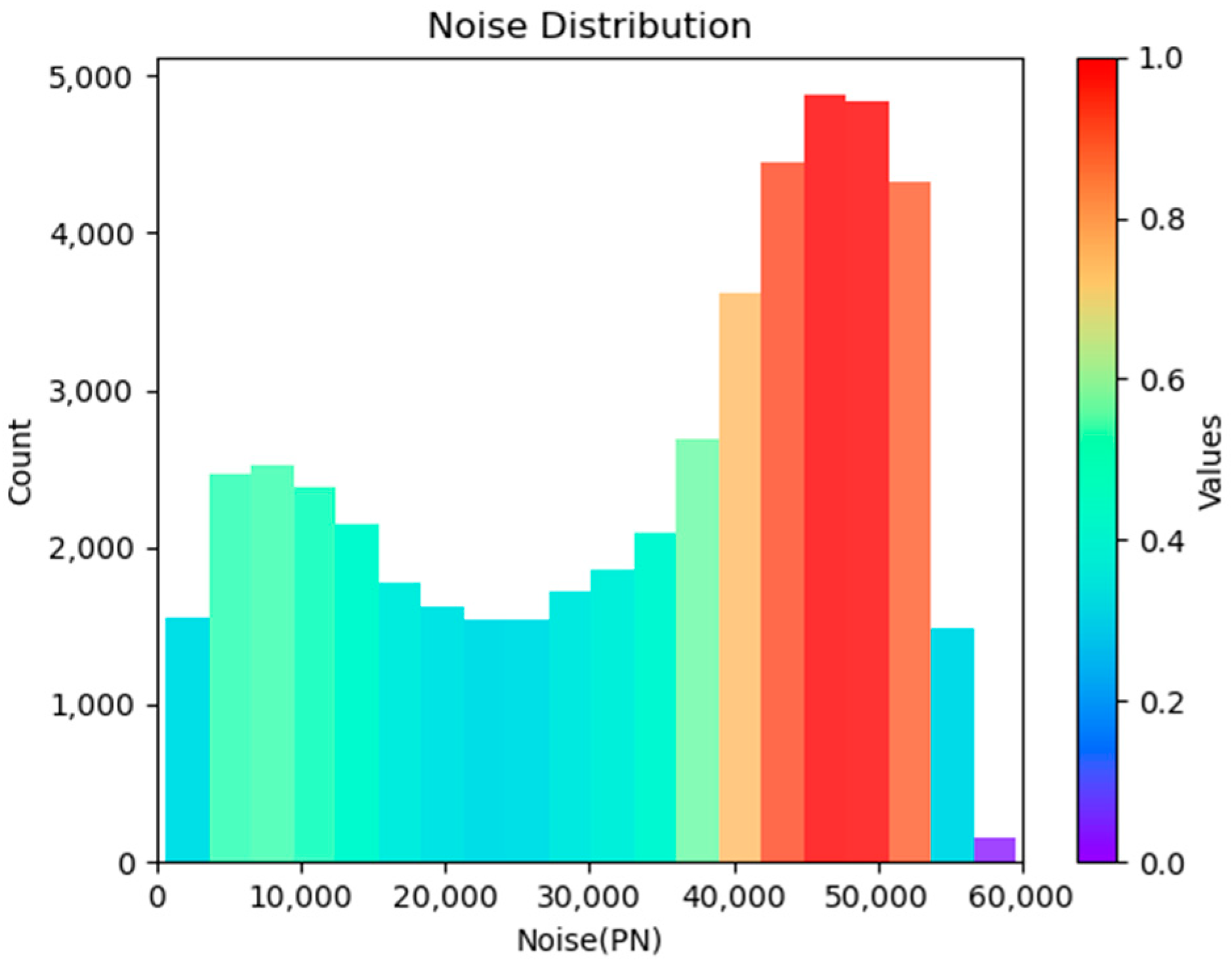
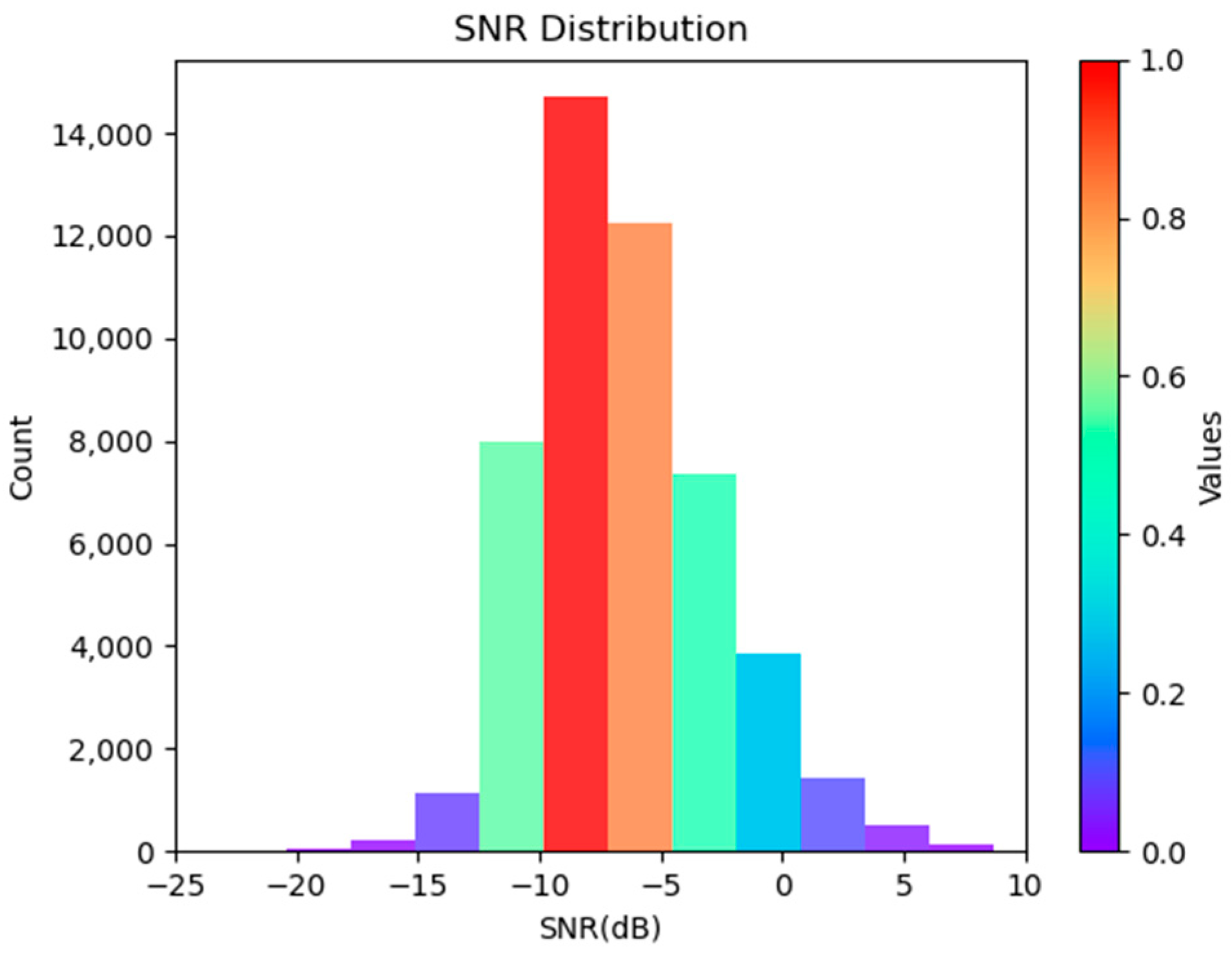
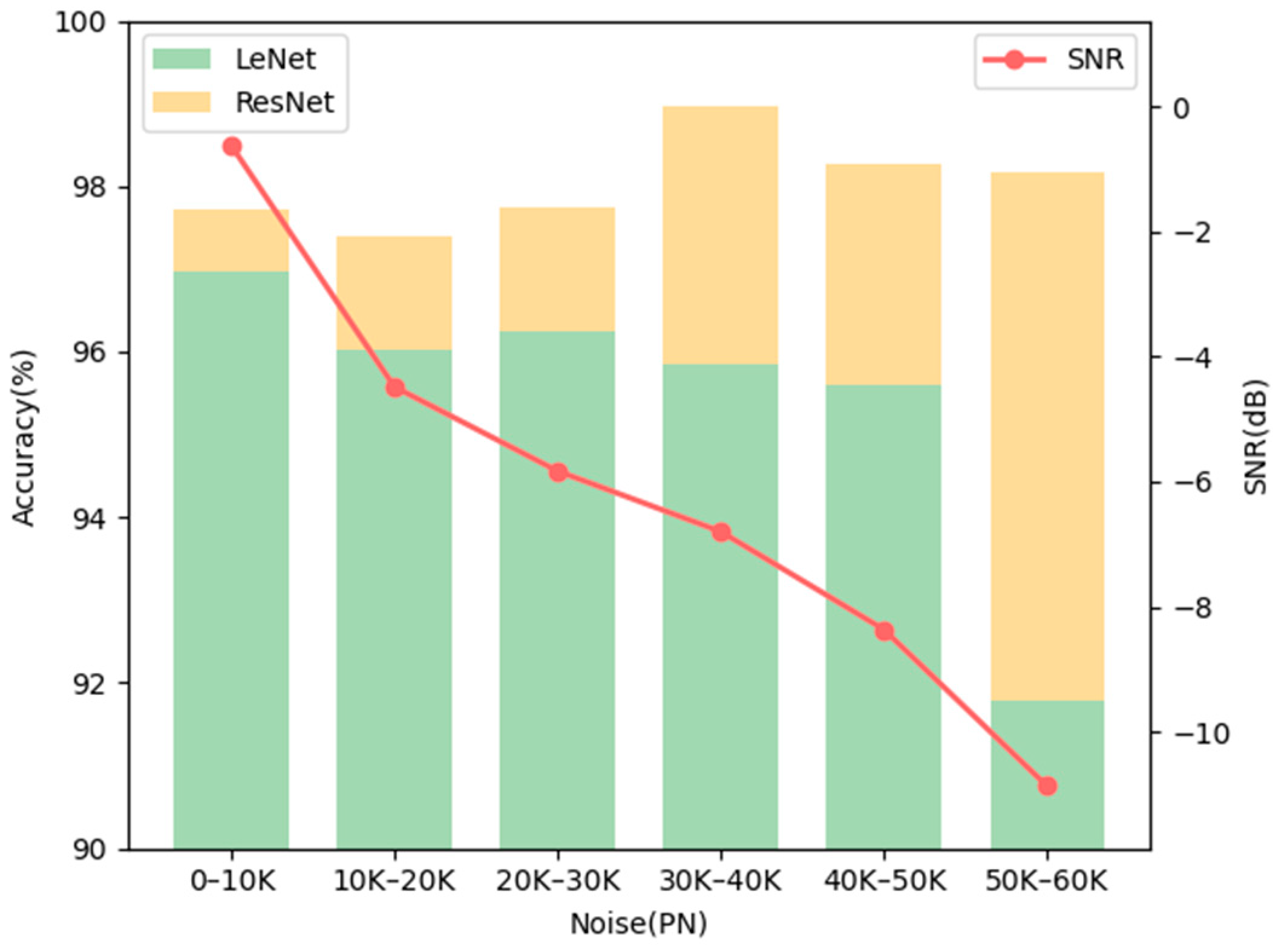
3.2. Analysis in Relation to Accuracy, SNR, and Noise
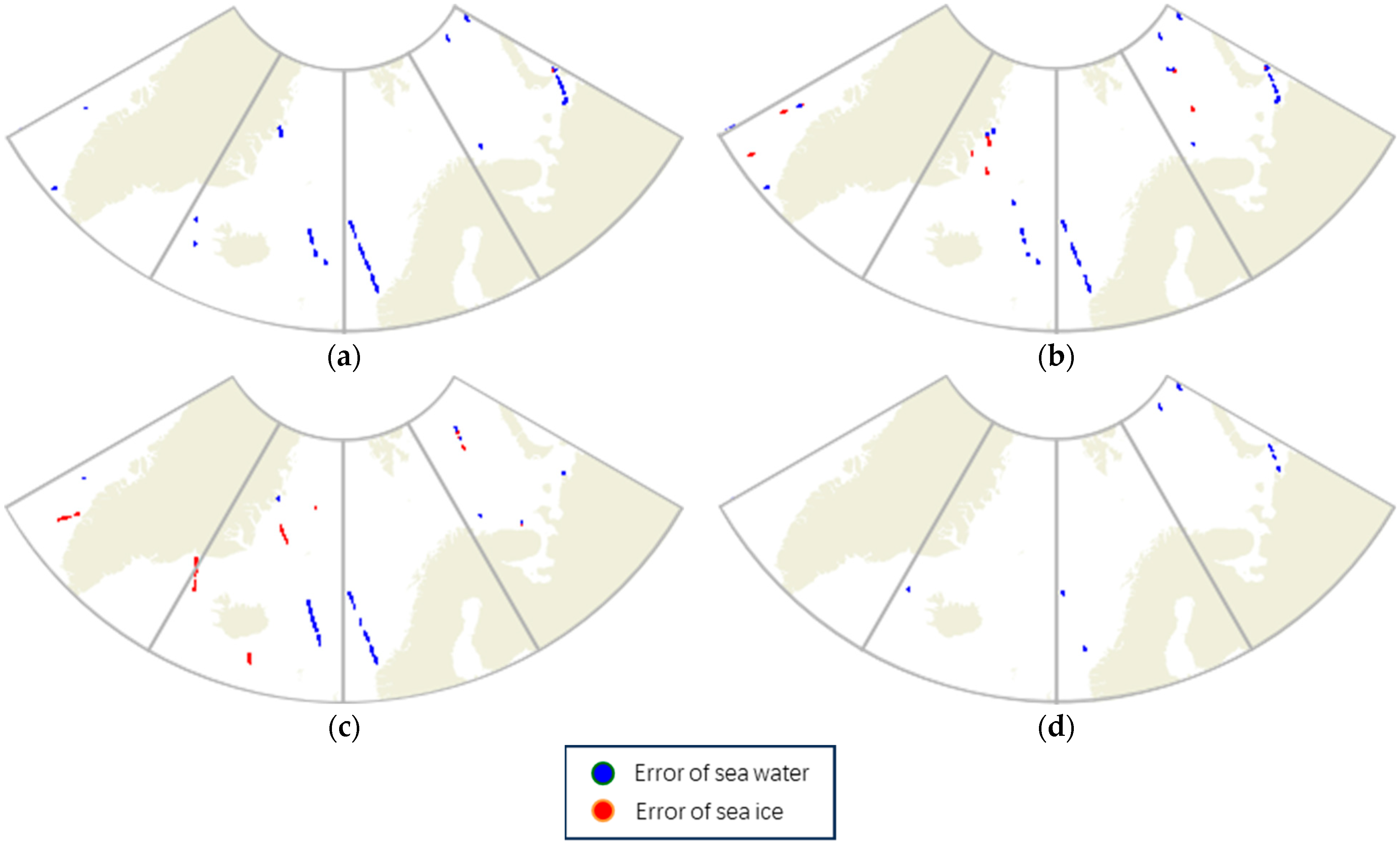
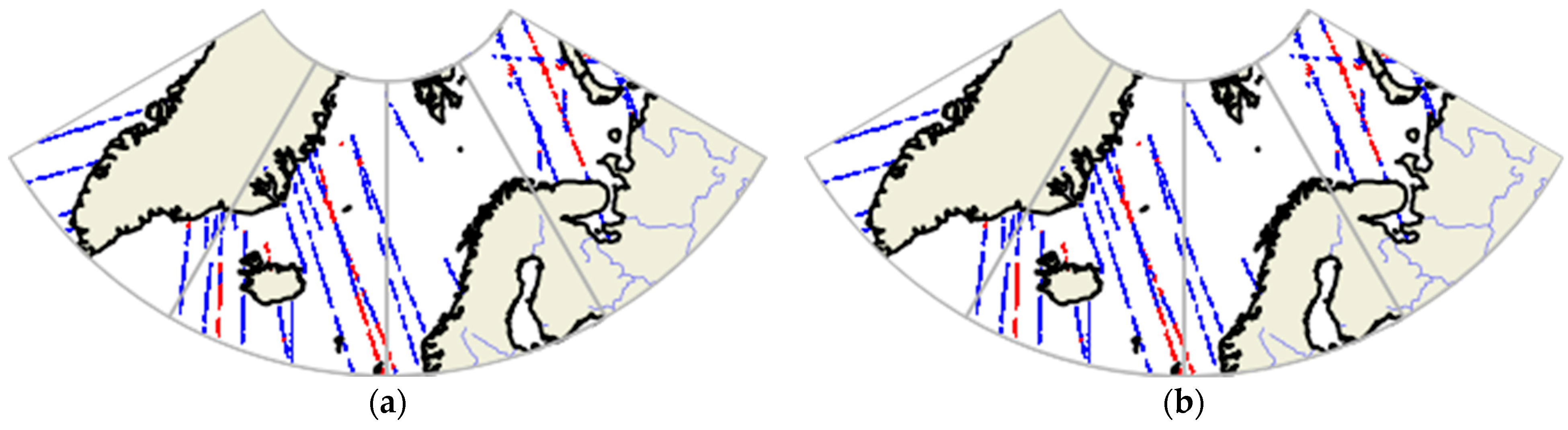
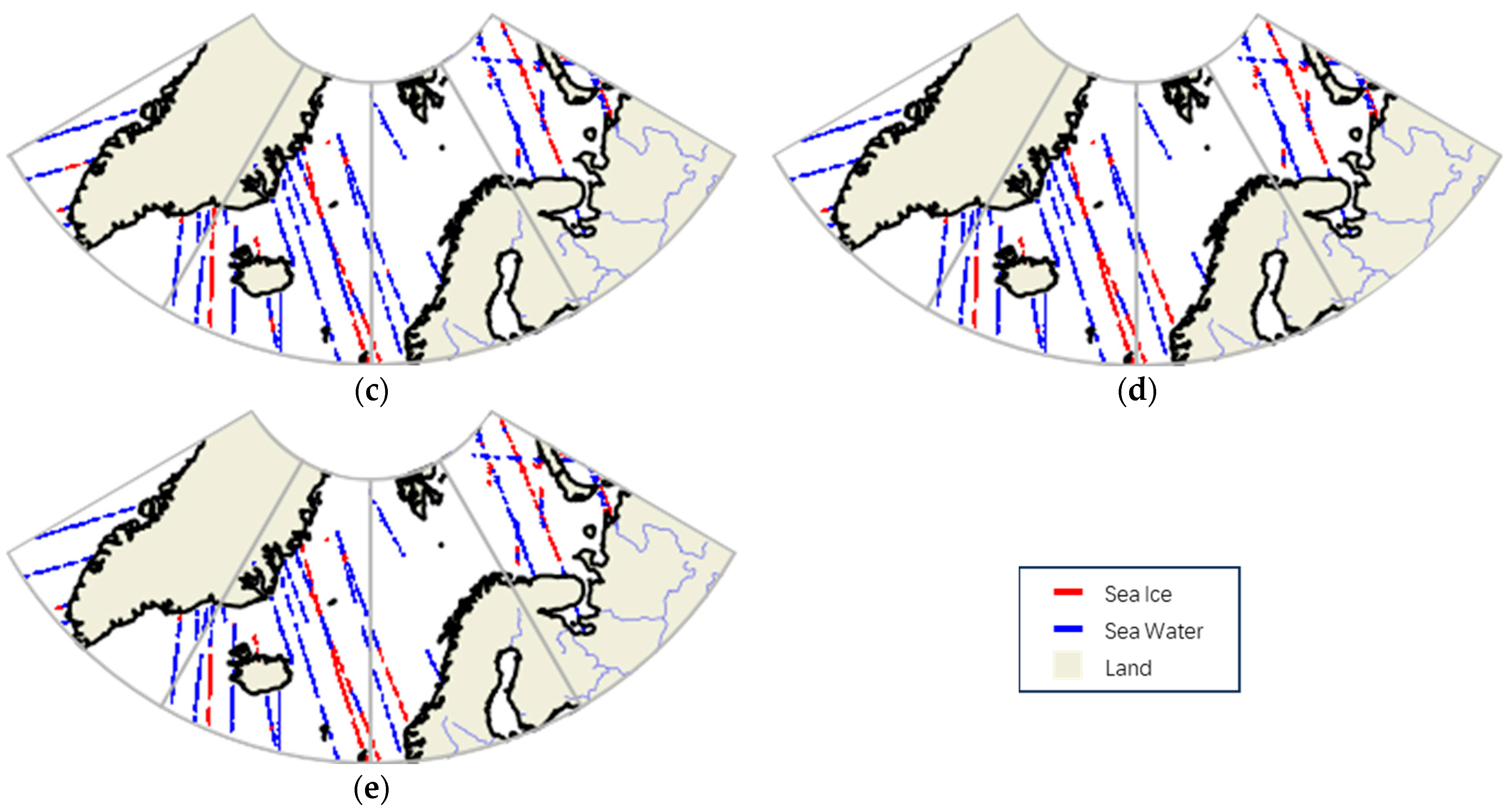
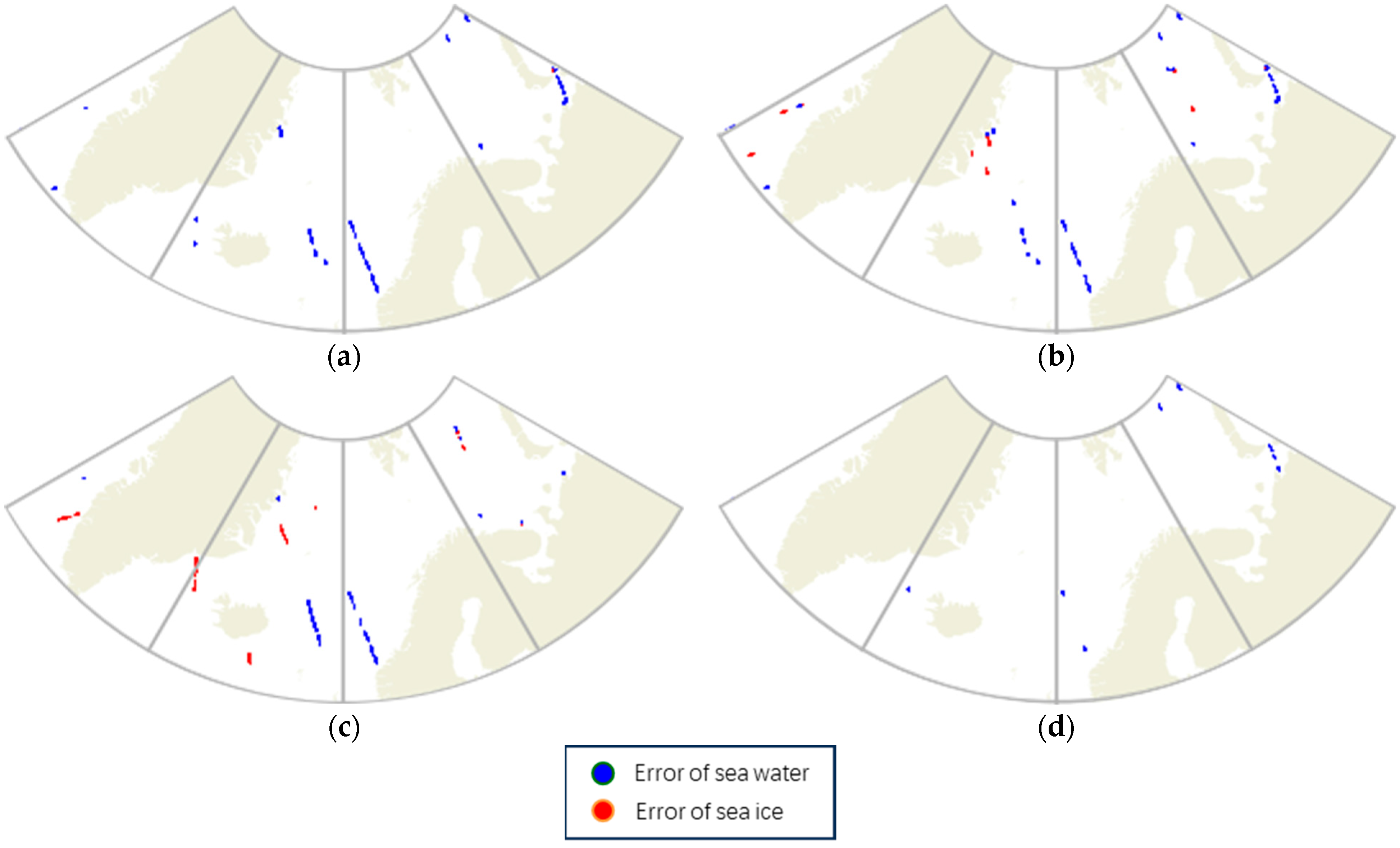
3.3. Analysis in Relation to Ground Truth
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rothrock, D.A.; Yu, Y.; Maykut, G.A. Thinning of the Arctic Sea-Ice Cover. Geophys. Res. Lett. 1999, 26, 3469–3472. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C. An Improved Model for the Dielectric Constant of Sea Water at Microwave Frequencies. IEEE Trans. Antennas Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- Tsang, L.; Newton, R.W. Microwave Emissions from Soils with Rough Surfaces. J. Geophys. Res. 1982, 87, 9017. [Google Scholar] [CrossRef]
- Hall, C.D.; Cordey, R.A. Multistatic Scatterometry. In Proceedings of the International Geoscience and Remote Sensing Symposium, “Remote Sensing: Moving Toward the 21st Century”, Edinburgh, UK, 12–16 September 1988; IEEE: Piscataway, NJ, USA, 1988; Volume 1, pp. 561–562. [Google Scholar]
- Guo, W.; Du, H.; Guo, C.; Southwell, B.J.; Cheong, J.W.; Dempster, A.G. Dempster Information Fusion for GNSS-R Wind Speed Retrieval Using Statistically Modified Convolutional Neural Network. Remote Sens. Environ. 2022, 272, 112934. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Arnold, C.; Weigel, T.; Ruf, C.; Wickert, J. GNSS Reflectometry Global Ocean Wind Speed Using Deep Learning: Development and Assessment of CyGNSSnet. Remote Sens. Environ. 2022, 269, 112801. [Google Scholar] [CrossRef]
- Guo, W.; Du, H.; Cheong, J.W.; Southwell, B.J.; Dempster, A.G. Dempster GNSS-R Wind Speed Retrieval of Sea Surface Based on Particle Swarm Optimization Algorithm. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4202414. [Google Scholar]
- Asgarimehr, M.; Zhelavskaya, I.; Foti, G.; Reich, S.; Wickert, J. A GNSS-R Geophysical Model Function: Machine Learning for Wind Speed Retrievals. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1333–1337. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Jin, S.; Jia, Y. Pan-Tropical Soil Moisture Mapping Based on a Three-Layer Model from CYGNSS GNSS-R Data. Remote Sens. Environ. 2020, 247, 111944. [Google Scholar] [CrossRef]
- Yan, Q.; Gong, S.; Jin, S.; Huang, W.; Zhang, C. Near Real-Time Soil Moisture in China Retrieved From CyGNSS Reflectivity. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8004205. [Google Scholar] [CrossRef]
- Yang, T.; Wan, W.; Sun, Z.; Liu, B.; Li, S.; Chen, X. Comprehensive Evaluation of Using TechDemoSat-1 and CYGNSS Data to Estimate Soil Moisture over Mainland China. Remote Sens. 2020, 12, 1699. [Google Scholar] [CrossRef]
- Santi, E.; Paloscia, S.; Pettinato, S.; Fontanelli, G.; Clarizia, M.P.; Comite, D.; Dente, L.; Guerriero, L.; Pierdicca, N.; Floury, N. Remote Sensing of Forest Biomass Using GNSS Reflectometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2351–2368. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, Y.; Jin, S.; Liu, S.; Jia, Y.; Zhen, Y.; Chen, T.; Huang, W. Inland Water Mapping Based on GA-LinkNet From CyGNSS Data. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1500305. [Google Scholar] [CrossRef]
- Ghiasi, Y.; Duguay, C.R.; Murfitt, J.; van der Sanden, J.J.; Thompson, A.; Drouin, H.; Prévost, C. Application of GNSS Interferometric Reflectometry for the Estimation of Lake Ice Thickness. Remote Sens. 2020, 12, 2721. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Foti, G. Quantification of the Relationship Between Sea Surface Roughness and the Size of the Glistening Zone for GNSS-R. IEEE Geosci. Remote Sens. Lett. 2018, 15, 237–241. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R Sea Ice Detection Using Delay-Doppler Maps: First Results From the U.K. TechDemoSat-1 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Zhu, Y.; Yu, K.; Zou, J.; Wickert, J. Sea Ice Detection Based on Differential Delay-Doppler Maps from UK TechDemoSat-1. Sensors 2017, 17, 1614. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using, U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Moloney, C. Neural Networks Based Sea Ice Detection and Concentration Retrieval From GNSS-R Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3789–3798. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Sensing From GNSS-R Data Using Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Detecting Sea Ice From TechDemoSat-1 Data Using Support Vector Machines With Feature Selection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1409–1416. [Google Scholar] [CrossRef]
- Hu, Y.; Jiang, Z.; Liu, W.; Yuan, X.; Hu, Q.; Wickert, J. GNSS-R Sea Ice Detection Based on Linear Discriminant Analysis. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5800812. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition CVPR, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS Signals from the Ocean with Wind Remote Sensing Application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Remote Sensing Using GNSS-R: A Review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Loria, E.; O’Brien, A.J.; Yi, Y. An Algorithm for Detecting Coherence in Cyclone Global Navigation Satellite System Mission Level-1 Delay-Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4454–4463. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Month | Number of DDM | Accuracy | |||
|---|---|---|---|---|---|
| AlexNet | Decision Tree | LeNet | ResNet | ||
| February | 209,829 | 99.31% | 98.20% | 98.88% | 99.43% |
| March | 166,202 | 99.51% | 98.34% | 99.14% | 99.69% |
| April | 260,209 | 99.33% | 98.27% | 98.81% | 99.38% |
| May | 59,479 | 99.04% | 97.50% | 98.09% | 99.23% |
| June | 75,772 | 97.53% | 96.62% | 97.06% | 98.53% |
| July | 124,263 | 96.19% | 95.67% | 95.17% | 97.79% |
| August | 43,023 | 95.11% | 93.82% | 93.73% | 97.57% |
| September | 48,837 | 94.53% | 93.85% | 93.52% | 97.67% |
| October | 66,462 | 96.56% | 95.52% | 95.58% | 97.73% |
| November | 70,805 | 99.08% | 98.14% | 99.06% | 99.06% |
| AVG | 97.62% | 96.59% | 96.90% | 98.61% | |
| Accuracy | Error Rate | Precision | F1-Score | Water_acc | Ice_acc | |
|---|---|---|---|---|---|---|
| AlexNet | 97.62% | 2.38% | 95.39% | 96.87% | 92.94% | 99.30% |
| Decision Tree | 96.59% | 3.41% | 93.17% | 95.16% | 90.23% | 98.69% |
| Lenet | 96.90% | 3.10% | 93.39% | 95.56% | 90.45% | 99.13% |
| ResNet18 | 98.61% | 1.39% | 96.85% | 97.63% | 96.22% | 99.13% |
| Number of DDMs | Number of Errors | Accuracy | Error Rate | Water_acc | Ice_acc | |
|---|---|---|---|---|---|---|
| AlexNet | 12,935 | 700 | 94.64% | 5.36% | 81.25% | 99.41% |
| Decision Tree | 12,935 | 1124 | 91.33% | 8.67% | 83.88% | 93.63% |
| Lenet | 12,935 | 1201 | 90.86% | 9.14% | 85.45% | 92.76% |
| ResNet18 | 12,935 | 58 | 99.50% | 0.5% | 98.41% | 99.99% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Hua, X.; Liu, W.; Wickert, J. Sea Ice Detection from GNSS-R Data Based on Residual Network. Remote Sens. 2023, 15, 4477. https://doi.org/10.3390/rs15184477
Hu Y, Hua X, Liu W, Wickert J. Sea Ice Detection from GNSS-R Data Based on Residual Network. Remote Sensing. 2023; 15(18):4477. https://doi.org/10.3390/rs15184477
Chicago/Turabian StyleHu, Yuan, Xifan Hua, Wei Liu, and Jens Wickert. 2023. "Sea Ice Detection from GNSS-R Data Based on Residual Network" Remote Sensing 15, no. 18: 4477. https://doi.org/10.3390/rs15184477
APA StyleHu, Y., Hua, X., Liu, W., & Wickert, J. (2023). Sea Ice Detection from GNSS-R Data Based on Residual Network. Remote Sensing, 15(18), 4477. https://doi.org/10.3390/rs15184477