



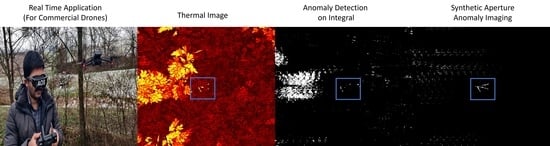
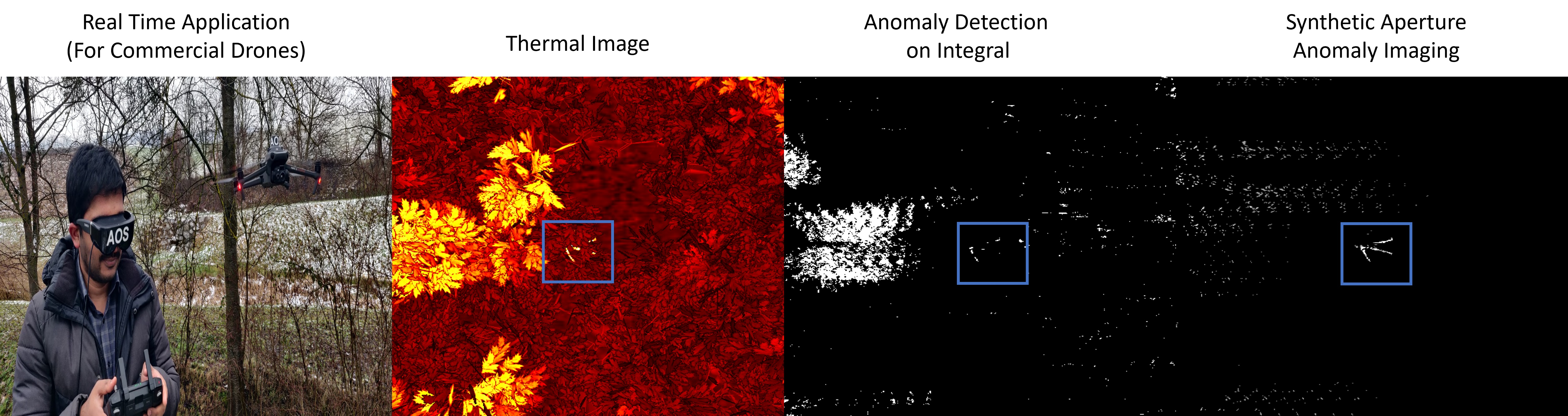
Synthetic Aperture Anomaly Imaging for Through-Foliage Target Detection


Abstract
:
1. Introduction
2. Materials and Methods
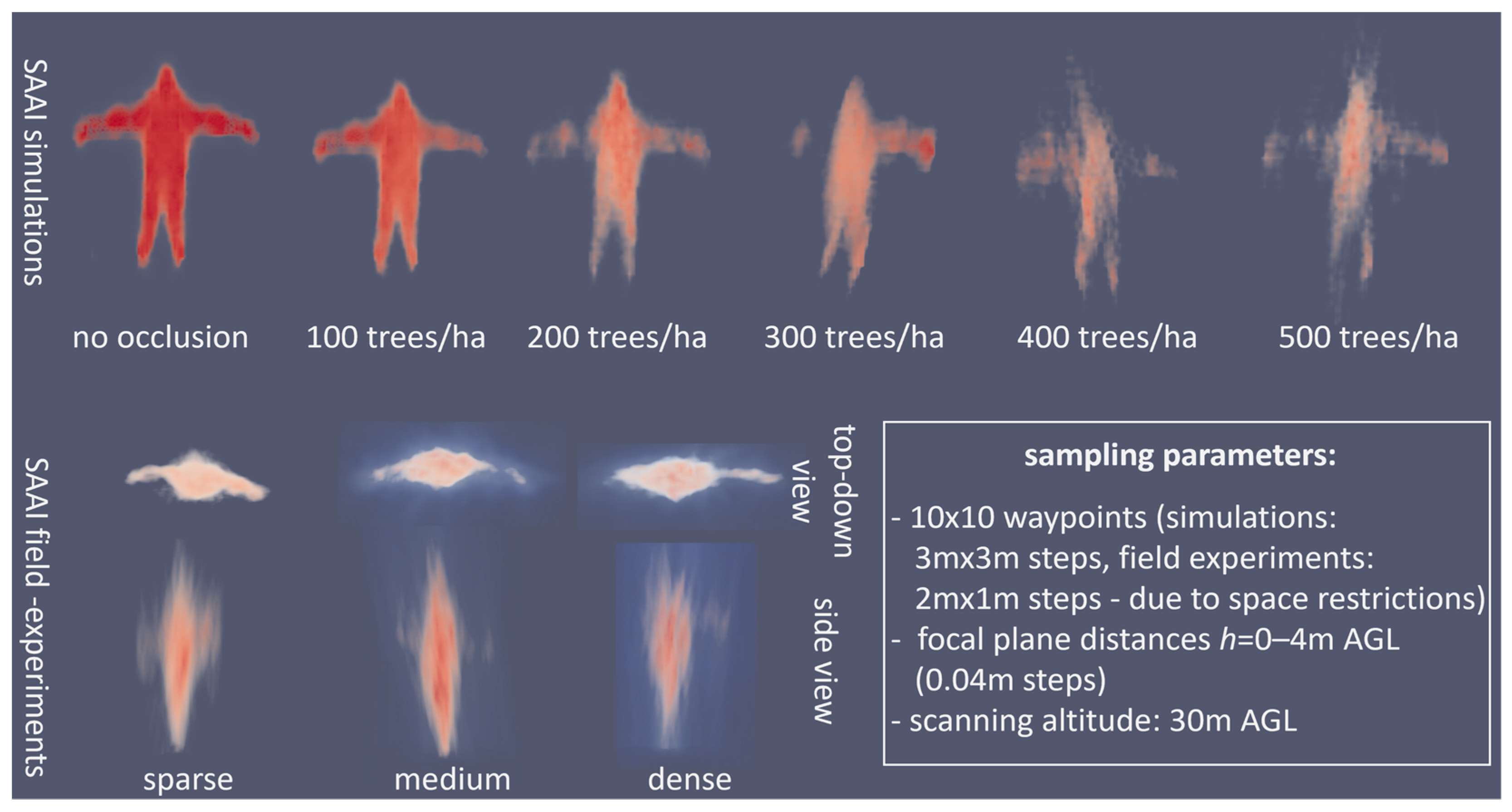
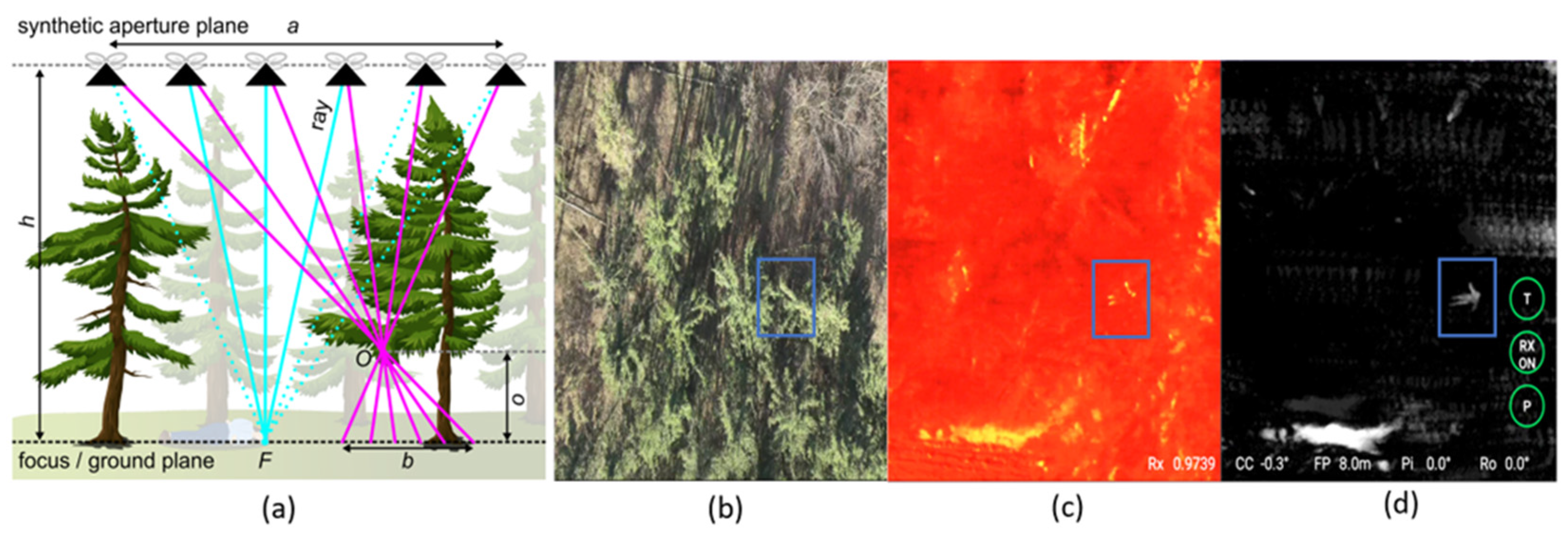
2.1. Simulation
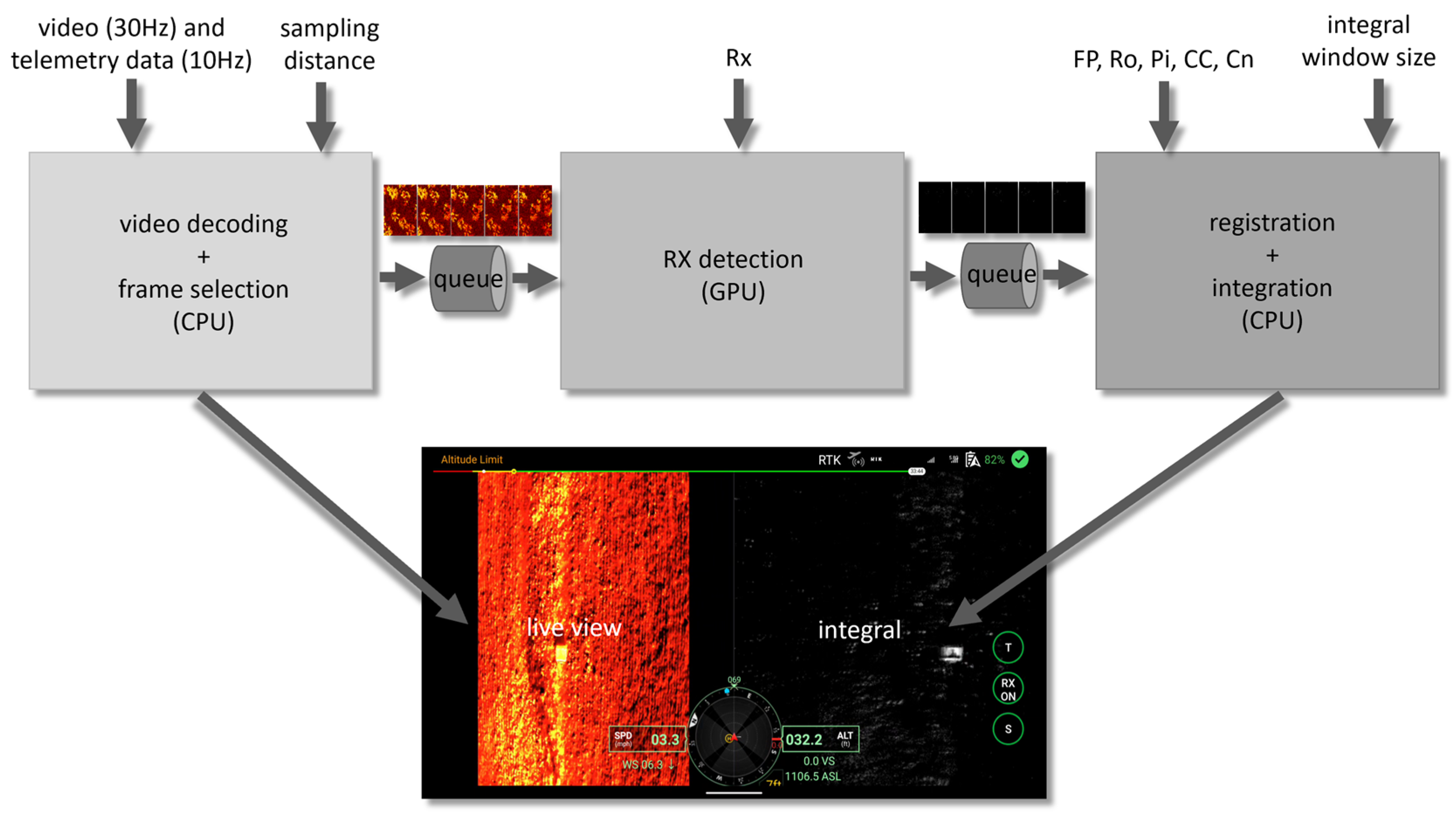
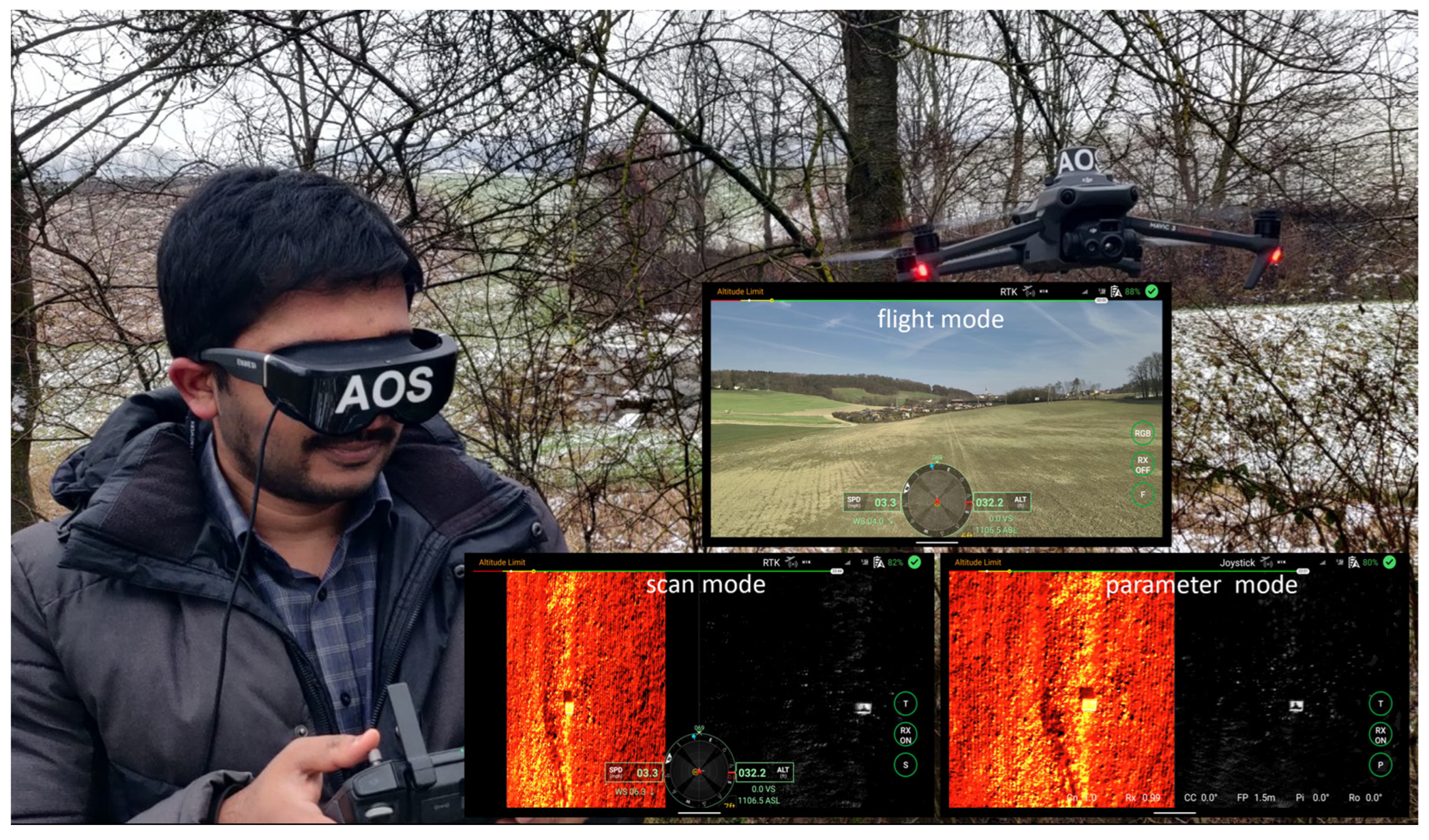
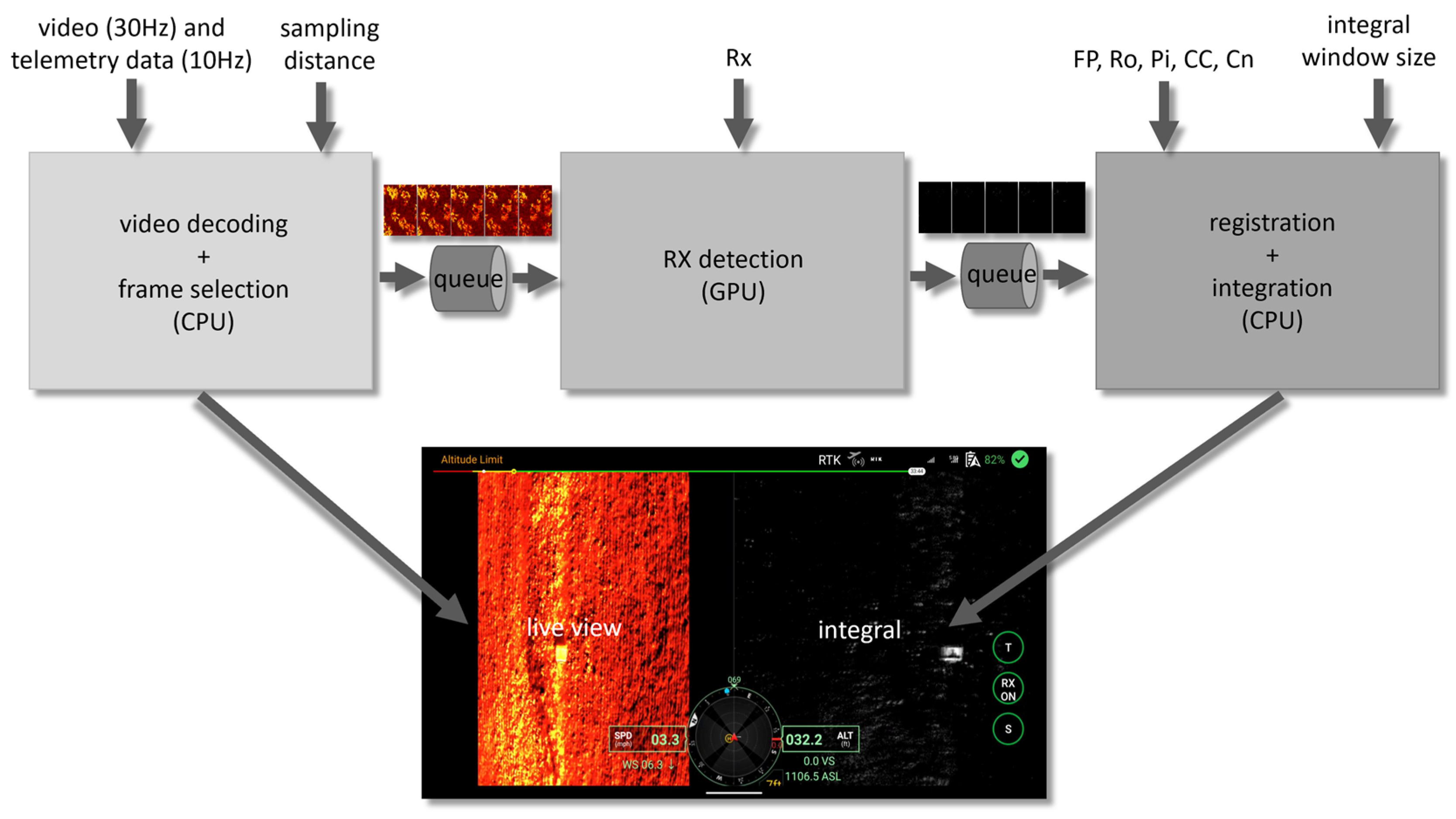
2.2. Real-Time Application on Commercial Drones
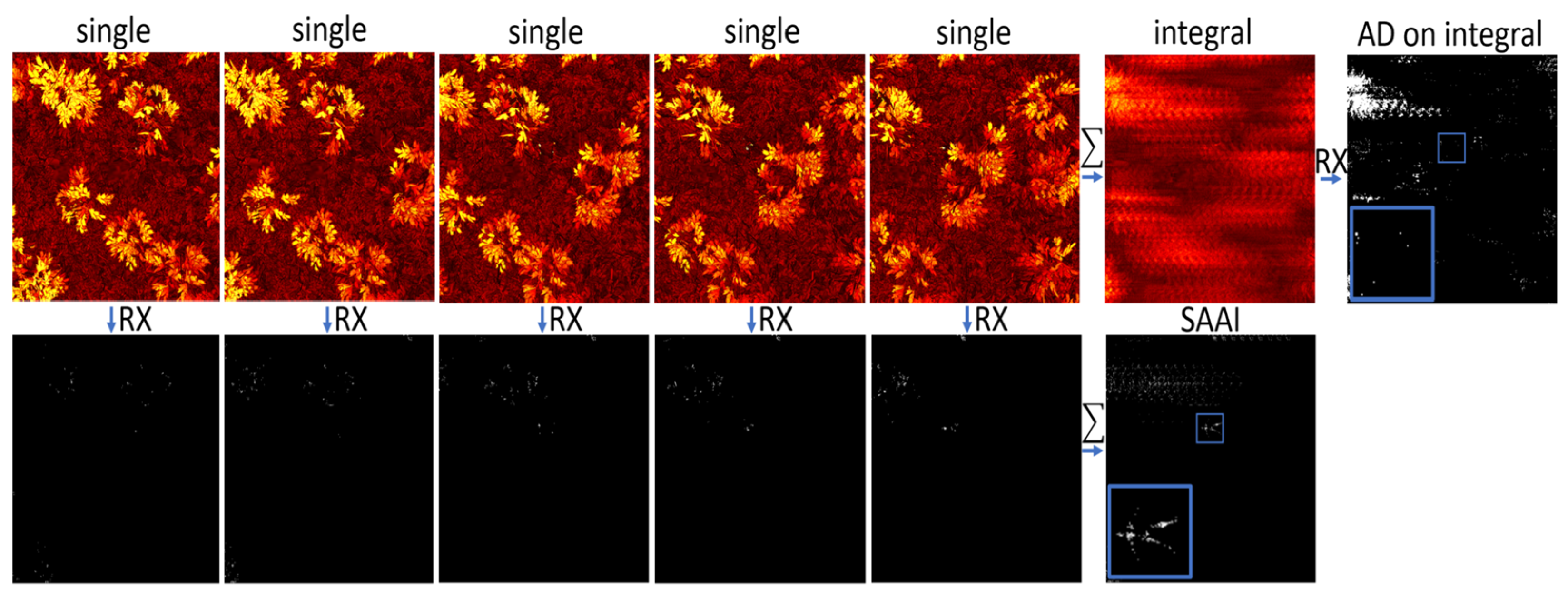
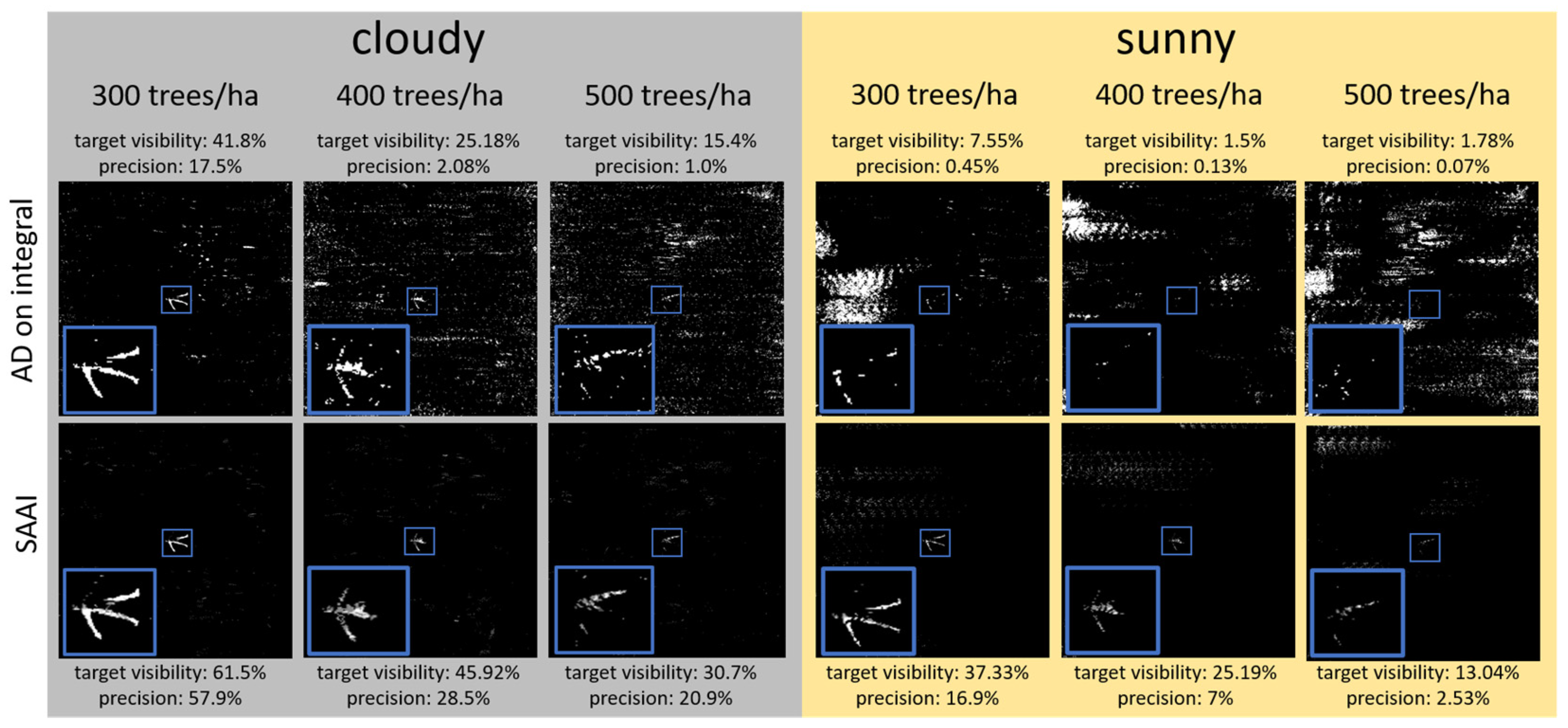
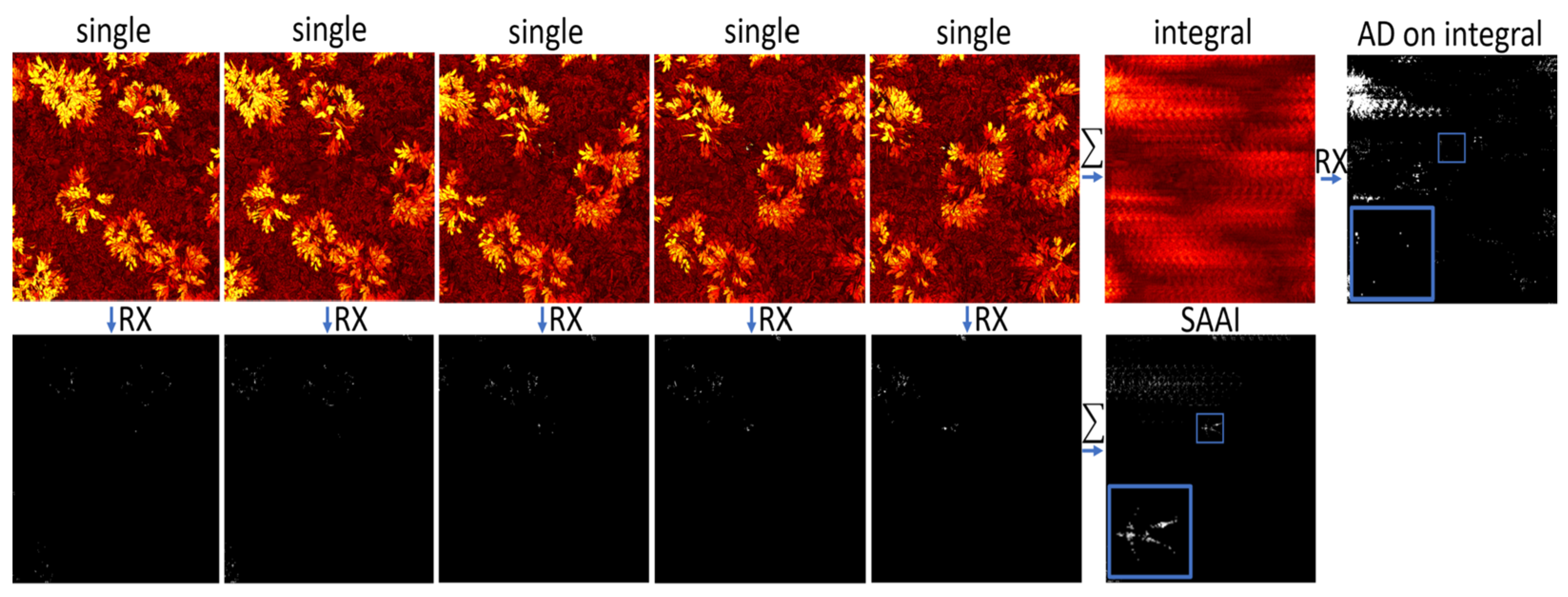
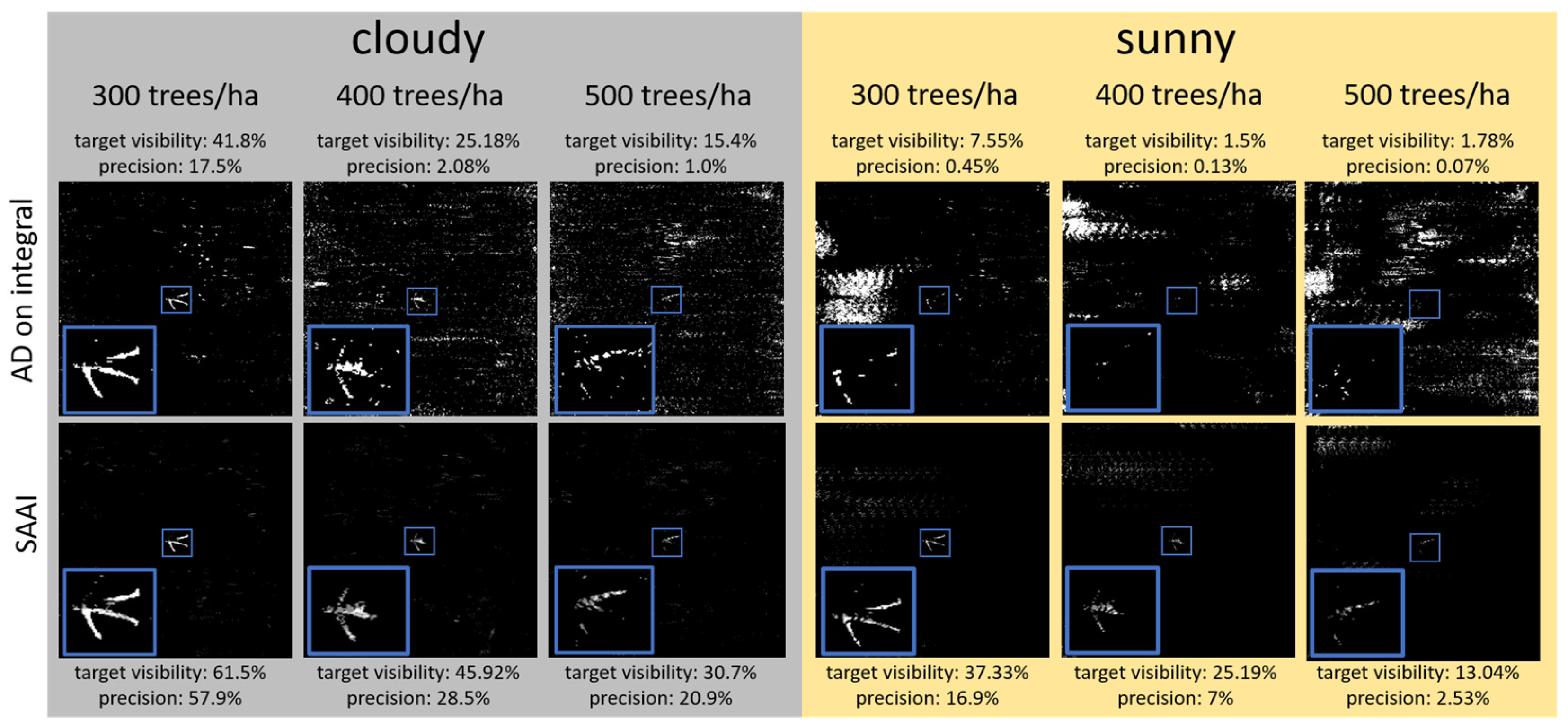
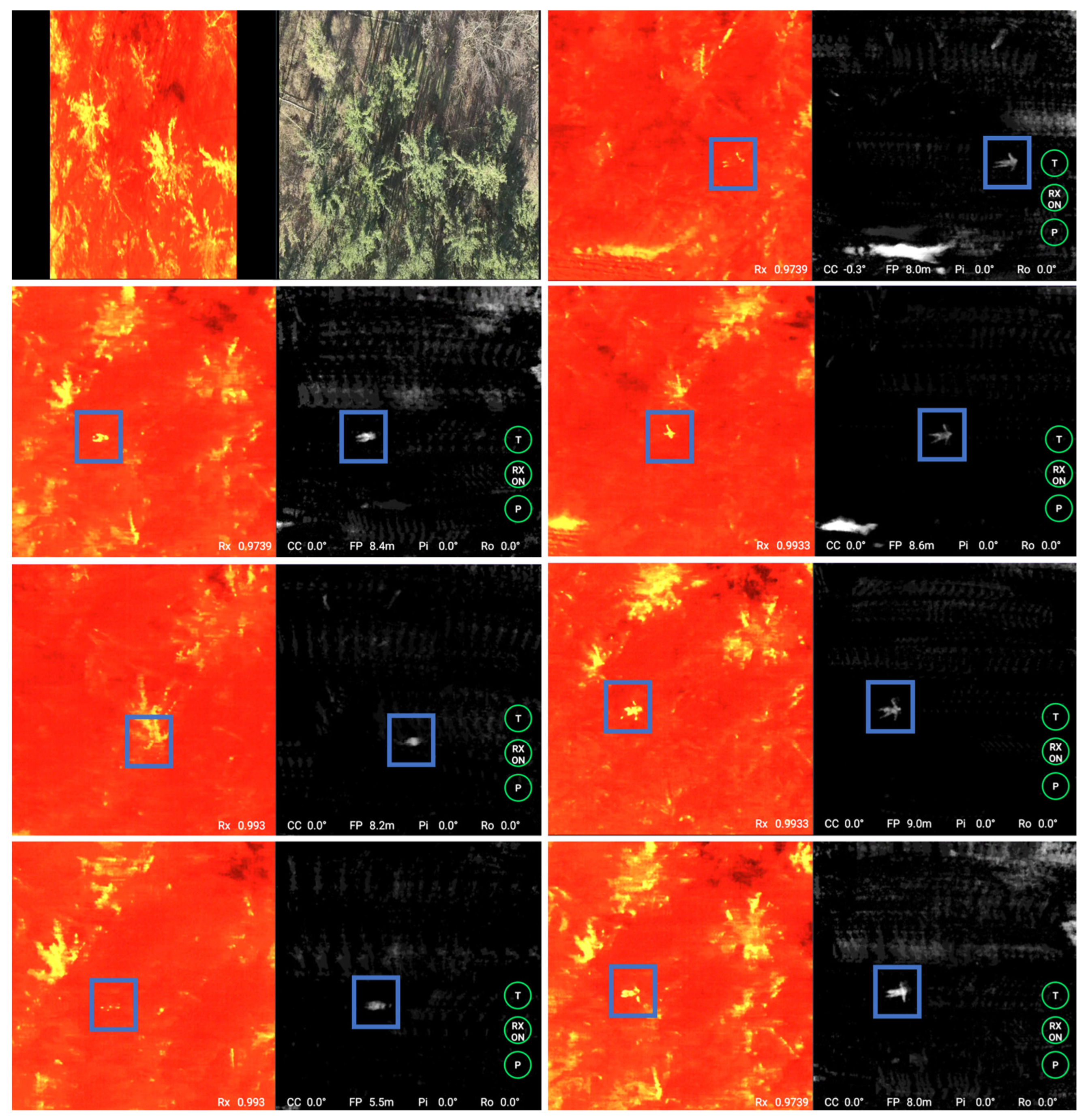
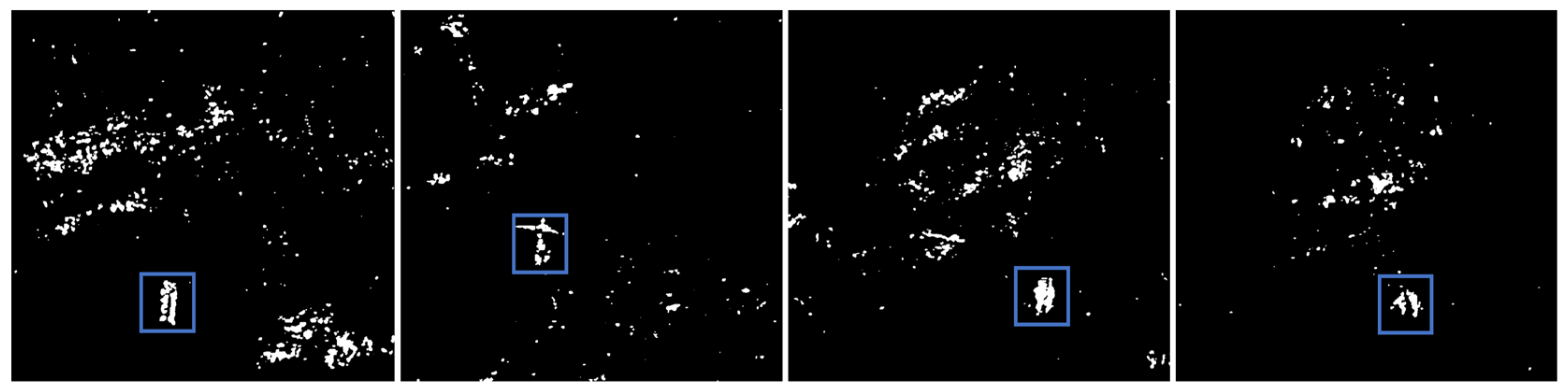
3. Results
4. Discussion
5. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Indrajit, K.; Schedl, D.C.; Bimber, O. Airborne Optical Sectioning. J. Imaging 2018, 4, 102. [Google Scholar] [CrossRef]
- Oliver, B.; Kurmi, I.; Schedl, D.C. Synthetic aperture imaging with drones. IEEE Comput. Graph. Appl. 2019, 39, 8–15. [Google Scholar] [CrossRef]
- Indrajit, K.; Schedl, D.C.; Bimber, O. A statistical view on synthetic aperture imaging for occlusion removal. IEEE Sens. J. 2019, 19, 9374–9383. [Google Scholar] [CrossRef]
- Indrajit, K.; Schedl, D.C.; Bimber, O. Thermal airborne optical sectioning. Remote Sens. 2019, 11, 1668. [Google Scholar] [CrossRef]
- Indrajit, K.; Schedl, D.C.; Bimber, O. Fast automatic visibility optimization for thermal synthetic aperture visualization. IEEE Geosci. Remote Sens. Lett. 2020, 18, 836–840. [Google Scholar] [CrossRef]
- Indrajit, K.; Schedl, D.C.; Bimber, O. Pose error reduction for focus enhancement in thermal synthetic aperture visualization. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Seits, F.; Kurmi, I.; Nathan, R.J.A.A.; Ortner, R.; Bimber, O. On the Role of Field of View for Occlusion Removal with Airborne Optical Sectioning. arXiv 2022, arXiv:2204.13371. [Google Scholar]
- David, C.S.; Kurmi, I.; Bimber, O. Airborne optical sectioning for nesting observation. Sci. Rep. 2020, 10, 7254. [Google Scholar] [CrossRef]
- David, C.S.; Kurmi, I.; Bimber, O. Search and rescue with airborne optical sectioning. Nat. Mach. Intell. 2020, 2, 783–790. [Google Scholar] [CrossRef]
- David, C.S.; Kurmi, I.; Bimber, O. An autonomous drone for search and rescue in forests using airborne optical sectioning. Sci. Robot. 2021, 6, eabg1188. [Google Scholar] [CrossRef]
- Indrajit, K.; Schedl, D.C.; Bimber, O. Combined person classification with airborne optical sectioning. Sci. Rep. 2022, 12, 3804. [Google Scholar] [CrossRef]
- Rudolf, O.; Kurmi, I.; Bimber, O. Acceleration-Aware Path Planning with Waypoints. Drones 2021, 5, 143. [Google Scholar] [CrossRef]
- Nathan, R.J.A.A.; Kurmi, I.; Schedl, D.C.; Bimber, O. Through-Foliage Tracking with Airborne Optical Sectioning. J. Remote Sens. 2022, 2022, 9812765. [Google Scholar] [CrossRef]
- Nathan, A.A.; John, R.; Kurmi, I.; Bimber, O. Inverse Airborne Optical Sectioning. Drones 2022, 6, 231. [Google Scholar] [CrossRef]
- Nathan, A.A.; John, R.; Kurmi, I.; Bimber, O. Drone swarm strategy for the detection and tracking of occluded targets in complex environments. Nat. Commun. Eng. 2023, 2, 55. [Google Scholar] [CrossRef]
- Francis, S.; Kurmi, I.; Bimber, O. Evaluation of Color Anomaly Detection in Multispectral Images for Synthetic Aperture Sensing. Eng 2022, 3, 541–553. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Wiley Carl, A. Pulsed Doppler Radar Methods and Apparatus. U.S. Patent No. 3,196,436, 20 July 1965. [Google Scholar]
- Cutrona, L.; Vivian, W.; Leith, E.; Hall, G. Synthetic aperture radars: A paradigm for technology evolution. IRE Trans. Mil. Electron 1961, 127–131. [Google Scholar] [CrossRef]
- Farquharson, G.; Woods, W.; Stringham, C.; Sankarambadi, N.; Riggi, L. The capella synthetic aperture radar constellation. In Proceedings of the EUSAR 2018 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; VDE: Bavaria, Germany, 2018. [Google Scholar]
- Fulong, C.; Lasaponara, R.; Masini, N. An overview of satellite synthetic aperture radar remote sensing in archaeology: From site detection to monitoring. J. Cult. Herit. 2017, 23, 5–11. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, H.; Wang, M.; Liu, X.; Chen, Q.; Wang, C.; Zhang, H. A Review of Satellite Synthetic Aperture Radar Interferometry Applications in Permafrost Regions: Current Status, Challenges, and Trends. IEEE Geosci. Remote Sens. Mag. 2022, 10, 93–114. [Google Scholar] [CrossRef]
- Kumar, R.A.; Parida, B.R. Predicting paddy yield at spatial scale using optical and Synthetic Aperture Radar (SAR) based satellite data in conjunction with field-based Crop Cutting Experiment (CCE) data. Int. J. Remote Sens. 2021, 42, 2046–2071. [Google Scholar] [CrossRef]
- Reigber, A.; Scheiber, R.; Jager, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-high-resolution airborne synthetic aperture radar imaging: Signal processing and applications. Proc. IEEE 2012, 101, 759–783. [Google Scholar] [CrossRef]
- Sumantyo, J.T.S.; Chua, M.Y.; Santosa, C.E.; Panggabean, G.F.; Watanabe, T.; Setiadi, B.; Sumantyo, F.D.S.; Tsushima, K.; Sasmita, K.; Mardiyanto, A.; et al. Airborne circularly polarized synthetic aperture radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1676–1692. [Google Scholar] [CrossRef]
- Tsunoda, S.I.; Pace, F.; Stence, J.; Woodring, M.; Hensley, W.H.; Doerry, A.W.; Walker, B.C. Lynx: A high-resolution synthetic aperture radar. In Proceedings of the 2000 IEEE Aerospace Conference, Orlando, FL, USA, 25 March 2000; Proceedings (Cat. No. 00TH8484). Volume 5. [Google Scholar]
- Fernandez, M.G.; Lopez, Y.A.; Arboleya, A.A.; Valdes, B.G.; Vaqueiro, Y.R.; Andres, F.L.-H.; Garcia, A.P. Synthetic aperture radar imaging system for landmine detection using a ground penetrating radar on board a unmanned aerial vehicle. IEEE Access 2018, 6, 45100–45112. [Google Scholar] [CrossRef]
- Tomonori, D.; Sugiyama, T.; Kishimoto, M. Development of SAR system installable on a drone. In Proceedings of the EUSAR 2021 13th European Conference on Synthetic Aperture Radar, Virtual, 29 March–1 April 2021; VDE: Bavaria, Germany, 2021. [Google Scholar]
- Mondini, A.C.; Guzzetti, F.; Chang, K.-T.; Monserrat, O.; Martha, T.R.; Manconi, A. Landslide failures detection and mapping using Synthetic Aperture Radar: Past, present and future. Earth-Sci. Rev. 2021, 216, 103574. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Prickett, M.J.; Chen, C.C. Principles of inverse synthetic aperture radar/ISAR/imaging. In Proceedings of the EASCON’80, Electronics and Aerospace Systems Conference, Arlington, VA, USA, September 29–1 October 1980. [Google Scholar]
- Risto, V.; Neuberger, N. Inverse Synthetic Aperture Radar Imaging: A Historical Perspective and State-of-the-Art Survey. IEEE Access 2021, 9, 113917–113943. [Google Scholar] [CrossRef]
- Caner, O. Inverse Synthetic Aperture Radar Imaging with MATLAB Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 210. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Yong, W.; Chen, X. 3-D interferometric inverse synthetic aperture radar imaging of ship target with complex motion. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3693–3708. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, B.; Chen, J.; Wu, F.; Sheng, J.; Hong, W. Sparse Inverse Synthetic Aperture Radar Imaging Using Structured Low-Rank Method. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Fabrizio, B.; Corsini, G. Autofocusing of inverse synthetic aperture radar images using contrast optimization. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1185–1191. [Google Scholar] [CrossRef]
- Bai, X.; Zhou, F.; Xing, M.; Bao, Z. Scaling the 3-D image of spinning space debris via bistatic inverse synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2010, 7, 430–434. [Google Scholar] [CrossRef]
- Anger, S.; Jirousek, M.; Dill, S.; Peichl, M. Research on advanced space surveillance using the IoSiS radar system. In Proceedings of the EUSAR 2021 13th European Conference on Synthetic Aperture Radar, Online, 29 March 2021; VDE: Bavaria, Germany, 2021. [Google Scholar]
- Vossiek, M.; Urban, A.; Max, S.; Gulden, P. Inverse synthetic aperture secondary radar concept for precise wireless positioning. IEEE Trans. Microw. Theory Tech. 2007, 55, 2447–2453. [Google Scholar] [CrossRef]
- Shyr-Long, J.; Chieng, W.-H.; Lu, H.-P. Estimating speed using a side-looking single-radar vehicle detector. IEEE Trans. Intell. Transp. Syst. 2013, 15, 607–614. [Google Scholar] [CrossRef]
- Ye, X.; Zhang, F.; Yang, Y.; Zhu, D.; Pan, S. Photonics-based high-resolution 3D inverse synthetic aperture radar imaging. IEEE Access 2019, 7, 79503–79509. [Google Scholar] [CrossRef]
- Neeraj, P.; Ram, S.S. Classification of automotive targets using inverse synthetic aperture radar images. IEEE Trans. Intell. Veh. 2022, 7, 675–689. [Google Scholar] [CrossRef]
- Ronny, L.; Leshem, A. Synthetic aperture radio telescopes. IEEE Signal Process. Mag. 2009, 27, 14–29. [Google Scholar] [CrossRef]
- Dainis, D.; Lagadec, T.; Nuñez, P.D. Optical aperture synthesis with electronically connected telescopes. Nat. Commun. 2015, 6, 6852. [Google Scholar] [CrossRef]
- Ralston, T.S.; Marks, D.L.; Carney, P.S.; Boppart, S.A. Interferometric synthetic aperture microscopy. Nat. Phys. 2007, 3, 129–134. [Google Scholar] [CrossRef]
- Roy, E. Introduction to Synthetic Aperture Sonar. Sonar Syst. 2011, 1–11. [Google Scholar] [CrossRef]
- Hayes Michael, P.; Peter, T. Gough. Synthetic aperture sonar: A review of current status. IEEE J. Ocean. Eng. 2009, 34, 207–224. [Google Scholar] [CrossRef]
- Hansen, R.E.; Callow, H.J.; Sabo, T.O.; Synnes, S.A.V. Challenges in seafloor imaging and mapping with synthetic aperture sonar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3677–3687. [Google Scholar] [CrossRef]
- Heiko, B.; Birk, A. Synthetic aperture sonar (SAS) without navigation: Scan registration as basis for near field synthetic imaging in 2D. Sensors 2020, 20, 4440. [Google Scholar] [CrossRef]
- Jensen, J.A.; Nikolov, S.I.; Gammelmark, K.L.; Pedersen, M.H. Synthetic aperture ultrasound imaging. Ultrasonics 2006, 44, e5–e15. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.K.; Cheng, A.; Bottenus, N.; Guo, X.; Trahey, G.E.; Boctor, E.M. Synthetic tracked aperture ultrasound imaging: Design, simulation, and experimental evaluation. J. Med. Imaging 2016, 3, 027001. [Google Scholar] [CrossRef]
- Zeb, W.B.; Dahl, J.R. Synthetic aperture ladar imaging demonstrations and information at very low return levels. Appl. Opt. 2014, 53, 5531–5537. [Google Scholar] [CrossRef]
- Terroux, M.; Bergeron, A.; Turbide, S.; Marchese, L. Synthetic aperture lidar as a future tool for earth observation. In Proceedings of the International Conference on Space Optics—ICSO 2014, Tenerife, Spain, 6–10 October 2014; SPIE: Bellingham, WA, USA, 2017; Volume 10563. [Google Scholar]
- Vaish, V.; Wilburn, B.; Joshi, N.; Levoy, M. Using plane + parallax for calibrating dense camera arrays. In Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2004. CVPR 2004, Washington, DC, USA, 27 June–2 July 2004; Volume 1. [Google Scholar]
- Vaish, V.; Levoy, M.; Szeliski, R.; Zitnick, C.L.; Kang, S.B. Reconstructing occluded surfaces using synthetic apertures: Stereo, focus and robust measures. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 2. [Google Scholar]
- Heng, Z.; Jin, X.; Dai, Q. Synthetic aperture based on plenoptic camera for seeing through occlusions. In Proceedings of the Pacific Rim Conference on Multimedia, Hefei, China, 21–22 September 2018; Springer: Cham, Germany, 2018. [Google Scholar]
- Yang, T.; Ma, W.; Wang, S.; Li, J.; Yu, J.; Zhang, Y. Kinect based real-time synthetic aperture imaging through occlusion. Multimed. Tools Appl. 2016, 75, 6925–6943. [Google Scholar] [CrossRef]
- Joshi, N.; Avidan, S.; Matusik, W.; Kriegman, D.J. Synthetic aperture tracking: Tracking through occlusions. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–20 October 2007. [Google Scholar]
- Pei, Z.; Li, Y.; Ma, M.; Li, J.; Leng, C.; Zhang, X.; Zhang, Y. Occluded-object 3D reconstruction using camera array synthetic aperture imaging. Sensors 2019, 19, 607. [Google Scholar] [CrossRef]
- Yang, T.; Zhang, Y.; Yu, J.; Li, J.; Ma, W.; Tong, X.; Yu, R.; Ran, L. All-in-focus synthetic aperture imaging. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Pei, Z.; Zhang, Y.; Chen, X.; Yang, Y.-H. Synthetic aperture imaging using pixel labeling via energy minimization. Pattern Recognit. 2013, 46, 174–187. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive Multiple-Band CFAR Detection of an Optical Pattern with Unknown Spectral Distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Chang, C.-I.; Chiang, S.-S. Anomaly Detection and Classification for Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 40, 1314–1325. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
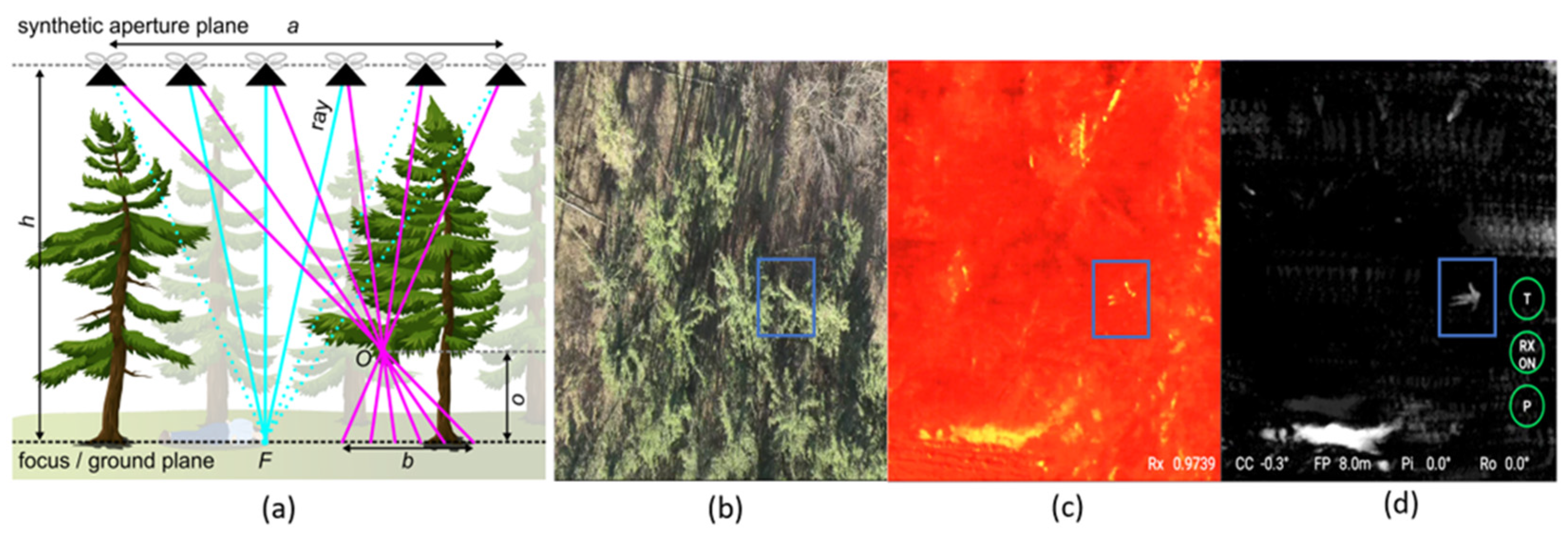
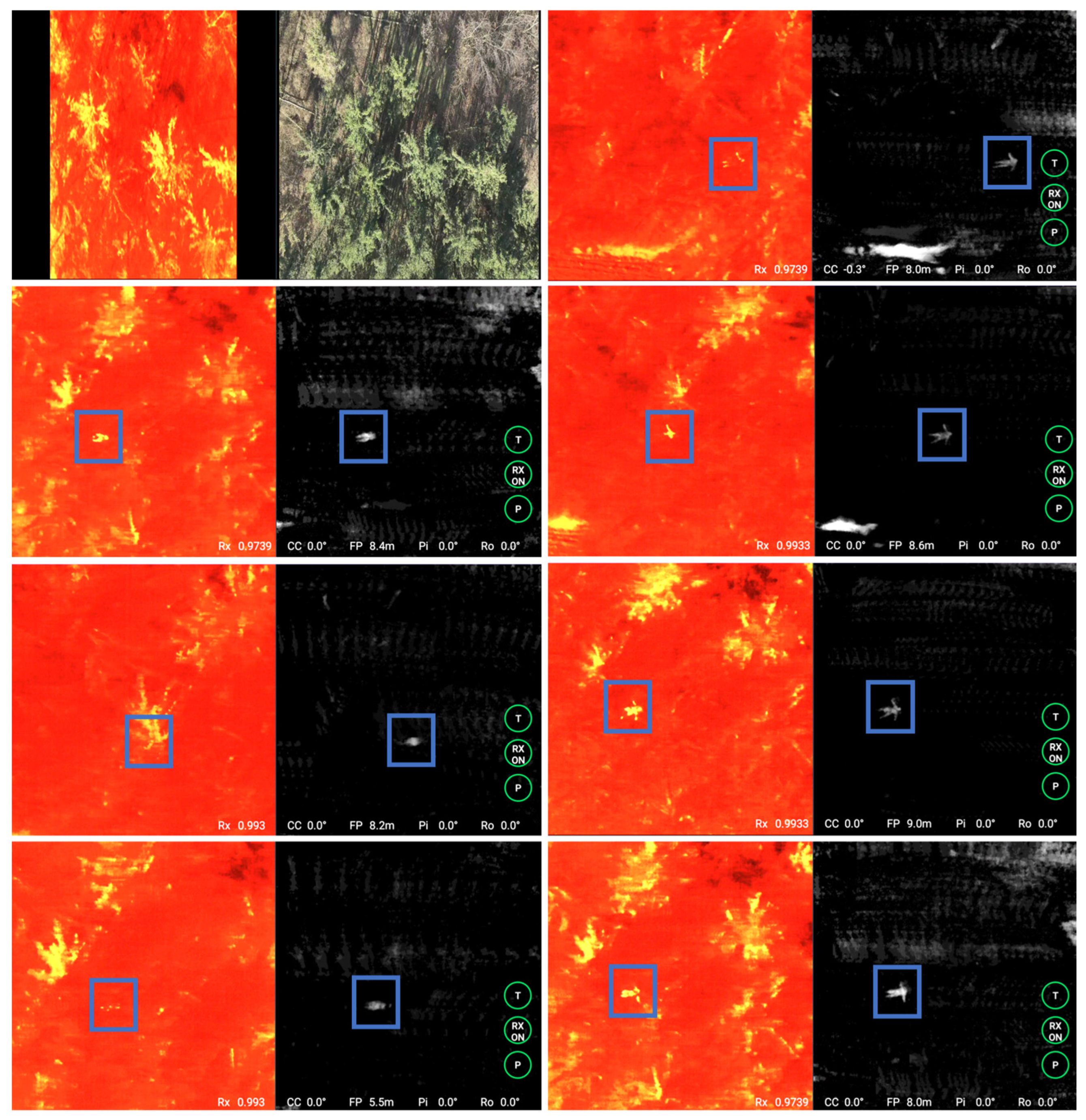
| Parameter | Description |
|---|---|
| (FP) | Focal plane distance h |
| (Pi) | Focal plane pitch correction value |
| (Ro) | Focal plane roll correction value |
| (CC) | Compass correction value |
| (Cn) | Contrast enhancement factor |
| (Rx) | Rx threshold |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amala Arokia Nathan, R.J.; Bimber, O. Synthetic Aperture Anomaly Imaging for Through-Foliage Target Detection. Remote Sens. 2023, 15, 4369. https://doi.org/10.3390/rs15184369
Amala Arokia Nathan RJ, Bimber O. Synthetic Aperture Anomaly Imaging for Through-Foliage Target Detection. Remote Sensing. 2023; 15(18):4369. https://doi.org/10.3390/rs15184369
Chicago/Turabian StyleAmala Arokia Nathan, Rakesh John, and Oliver Bimber. 2023. "Synthetic Aperture Anomaly Imaging for Through-Foliage Target Detection" Remote Sensing 15, no. 18: 4369. https://doi.org/10.3390/rs15184369
APA StyleAmala Arokia Nathan, R. J., & Bimber, O. (2023). Synthetic Aperture Anomaly Imaging for Through-Foliage Target Detection. Remote Sensing, 15(18), 4369. https://doi.org/10.3390/rs15184369