1. Introduction
An optical remote sensor requires absolute radiometric calibration to quantify the sensor’s response to a known radiometric input [
1]. Although a remote sensor has been calibrated with high accuracy before launch, its performance inevitably changes during its transportation, launch, and on-orbit operation. Therefore, on-orbit calibration is necessary [
2,
3]. Among the various on-orbit calibration methods, an on-board calibration method based on a solar diffuser (SD) has the advantages of high frequency, full aperture, a full field of view, and end-to-end characteristics. This is currently the dominant on-board calibration method in the solar reflective band. In this calibration method, the solar radiance reflected from an SD is used as a high radiance source. The radiance at the sensor aperture when viewing the SD is directly influenced by the SD BRDF [
4,
5,
6,
7,
8,
9]. Therefore, the SD BRDF is a key parameter that determines the uncertainty of on-board calibration.
The BRDF can accurately describe the spatial and spectral characteristics of an object. It is defined as the ratio of irradiance falling on the object’s surface from a given direction, and its contribution, to the radiance that is reflected in another direction. The initial SD BRDF for an on-board calibration can only be measured in a laboratory before launch [
10]. After entering orbit, the stability of the BRDF can be monitored through an SD stability monitor or a backup SD [
11,
12].
In recent years, many institutions have conducted research on absolute BRDF measurement. The Robotic Optical Scattering Instrument (ROSI) developed by the National Institute of Standards and Technology (NIST) realized a high-accuracy BRDF measurement in the range of 250 nm to 2400 nm. In the range of 250 nm to 1050 nm, the uncertainty (coverage factor k = 2) of a BRDF measurement at standard in-plane geometry (0°/45°), i.e., with an incident zenith angle of 0° and a reflected zenith angle of 45°, was less than 0.82% and increased to 1.92% for 1050 nm to 2400 nm [
13,
14]. The Physikalisch-Technische Bundesanstalt (PTB) developed a gonioreflectomter based on a five-axis robot. The wavelength range covered 250 nm to 1700 nm. The uncertainty (k = 2) of the BRDF measurement in standard geometry was less than 0.5% at 400 nm to 1700 nm and 1.5% at 250 nm to 400 nm [
15,
16,
17]. The National Research Council (NRC, Canada) gonioreflectometer applied an array spectroradiometer as the radiation measurement device to achieve high-accuracy BRDF measurement at 250 nm to 1700 nm. The k = 2 uncertainty in the standard geometry was less than 0.5% in the range of 400 nm to 900 nm [
18]. The Consejo Superior de Investigaciones Científicas (CSIC) Research Institute developed a measurement facility named Gonio-EspectroFótometro Español (GEFE), which could measure the BRDF and bidirectional transmittance distribution function (BTDF) of samples. The wavelength range covered 380 nm to 780 nm. The overall BRDF measurement uncertainty was less than 1% [
17,
19]. All uncertainties above are the measurement uncertainties for a BRDF of a nearly perfect diffuser.
The measurement facilities of the above national metrology laboratories are mainly used for standard transfer, rather than SD BRDF measurement for on-board calibration. At present, most SD BRDF measurement facilities achieve measurements that are traceable to a reflectance standard, i.e., a reference sample. The reflectance of the reference is known for the specified geometry and wavelength range. The facility is first calibrated with reference to the standard, and then the sample is substituted for the standard. For example, two scatterometers at NASA GSFC’s Diffuser Calibration Lab (DCL) were used to effect NIST traceable BRDF scale transfers and enable the prelaunch testing of large-area solar diffuser flight unit panels in their on-orbit configurations [
20]. The relative measurement method is simple and convenient. However, the disadvantages are obvious. The standard transfer is needed in this method. The major uncertainty then lies in the BRDF of the standard. The reference sample can easily be contaminated, which affects the measurement results [
10].
To further reduce measurement uncertainty, some laboratories have developed absolute BRDF measurement facilities, such as the Polarization and Scatter Characterization Analysis of Lambertian materials (PASCAL) at Raytheon [
21]. An absolute measurement means that the BRDF is obtained by measuring the incident and reflected radiation according to the definition of the BRDF. Additionally, no reference standard is introduced into the absolute measurement. Compared to relative measurement, an absolute measurement system needs a linear receiver over a sufficiently wide dynamic range [
10].
In the on-board calibration process, the relative geometric relationship with respect to the SD between the incident direction of the sunlight and the observed direction of a remote sensor determines the incident and reflected angles of the SD BRDF measurement in the laboratory. Due to the limitations of satellite orbits, on-board calibration times, and other factors, it is necessary to measure SD BRDF with high accuracy at in- and out-of-plane and large angle geometries. In this case, the BRDF measurement’s uncertainty increases compared to measuring in the standard geometry. There are many reasons for this problem, such as angle uncertainty and polarization [
22].
An SD is often made of polytetrafluoroethylene (PTFE), sand-blasted aluminum, etc. [
23]. According to the spatial and spectral characteristics of the SD, an improved data processing method could be designed based on the reciprocity theorem. This method could reduce the dependence of the measurement uncertainty on the angular accuracy of the goniometer system. An integrating sphere radiator was used as a source to ensure high-irradiance uniform illumination while reducing the influence of polarization on the measurement results.
This article is organized as follows. In
Section 2, the principle of absolute BRDF measurement is introduced. In
Section 3, an absolute BRDF measurement facility is introduced, including the configuration, calibration methods, and results of each part. The workflow of the facility is also presented. In
Section 4, the determination of the SD BRDF measurement angle and the causes of large-angle incidence and detection in on-board calibration are discussed. An improved data processing method based on the reciprocity theorem is also introduced. The uncertainty of the SD BRDF measurement is analyzed based on the system calibration results from the overall facility in
Section 5. The measurement results of the SD BRDF for on-board calibration are provided in
Section 6. Finally, conclusions are given in
Section 7.
2. Absolute BRDF Measurement Principle
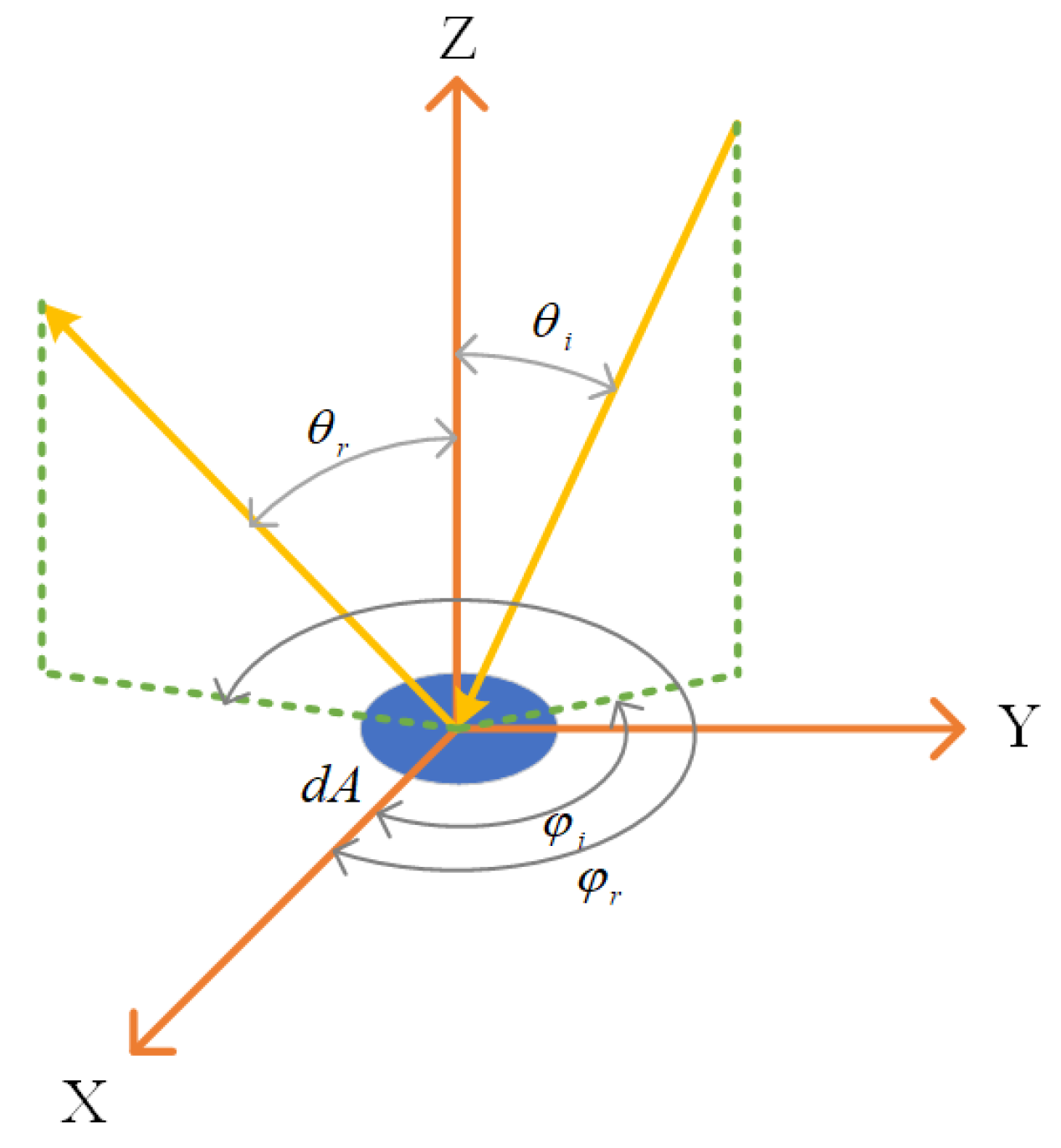
The BRDF can be defined as [
24]
where
represents the radiance reflected in a given direction by an infinitesimal element;
represents the irradiance from the incident direction that falls on this infinitesimal surface element;
represent the zenith angle and azimuth angle in the incident direction;
represent the zenith angle and azimuth angle in the reflected direction; and
stands for the wavelength. The geometric relationship of
is shown in
Figure 1.
According to the definition of radiance and irradiance,
where
and
represent the radiance and irradiance, respectively, when the direction of incidence is perpendicular to the sample, and
represents the illumination solid angle.
Equation (2) can be substituted into Equation (1), integrating both sides at the same time:
These measurements can be made at narrow solid angles and on small surfaces; the output of the radiation source is uniform (in spatial direction). The SD for on-board calibration is a nearly perfect diffuser. Therefore,
and
can be considered constants. Then
where R represents the distance from the radiation source opening to the center of the sample, and A represents the area of the radiation source opening. Equation (4) shows that the required SD BRDF could be obtained by measuring the incident radiance, the illumination solid angle, and the reflected radiance.
The incident and reflected radiance are measured using the same detection system, and the final BRDF calculation requires only the ratio of the incident radiance to reflected radiance; therefore, it is not necessary to know the absolute value of the measured radiance. Thus, Equation (4) can be expressed as
where
and
represent the digital number (DN) of the detector for the reflected and incident radiance, respectively. To simplify the expression, DN was subtracted from the dark currents in this paper.
3. Description and Calibration of the Facility
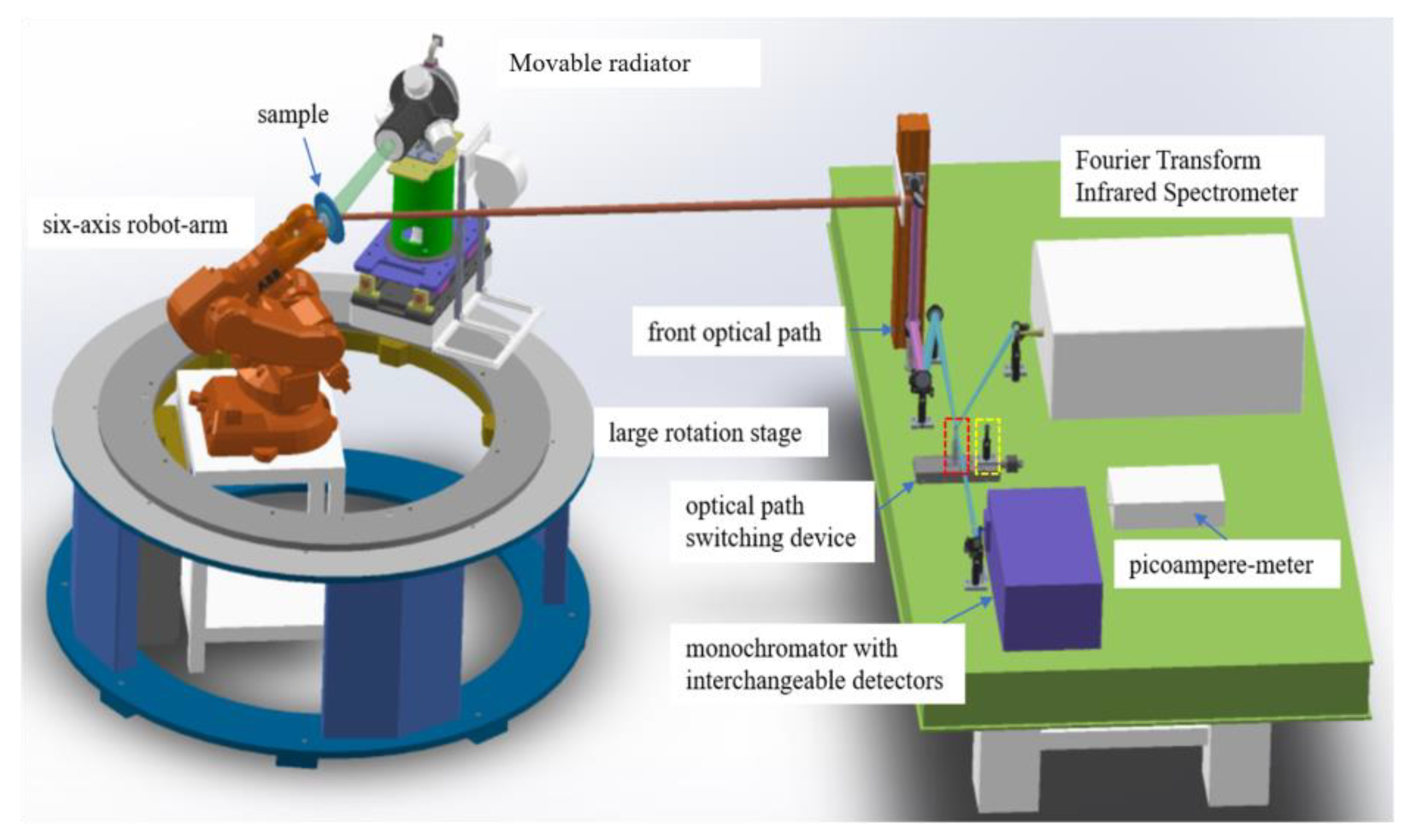
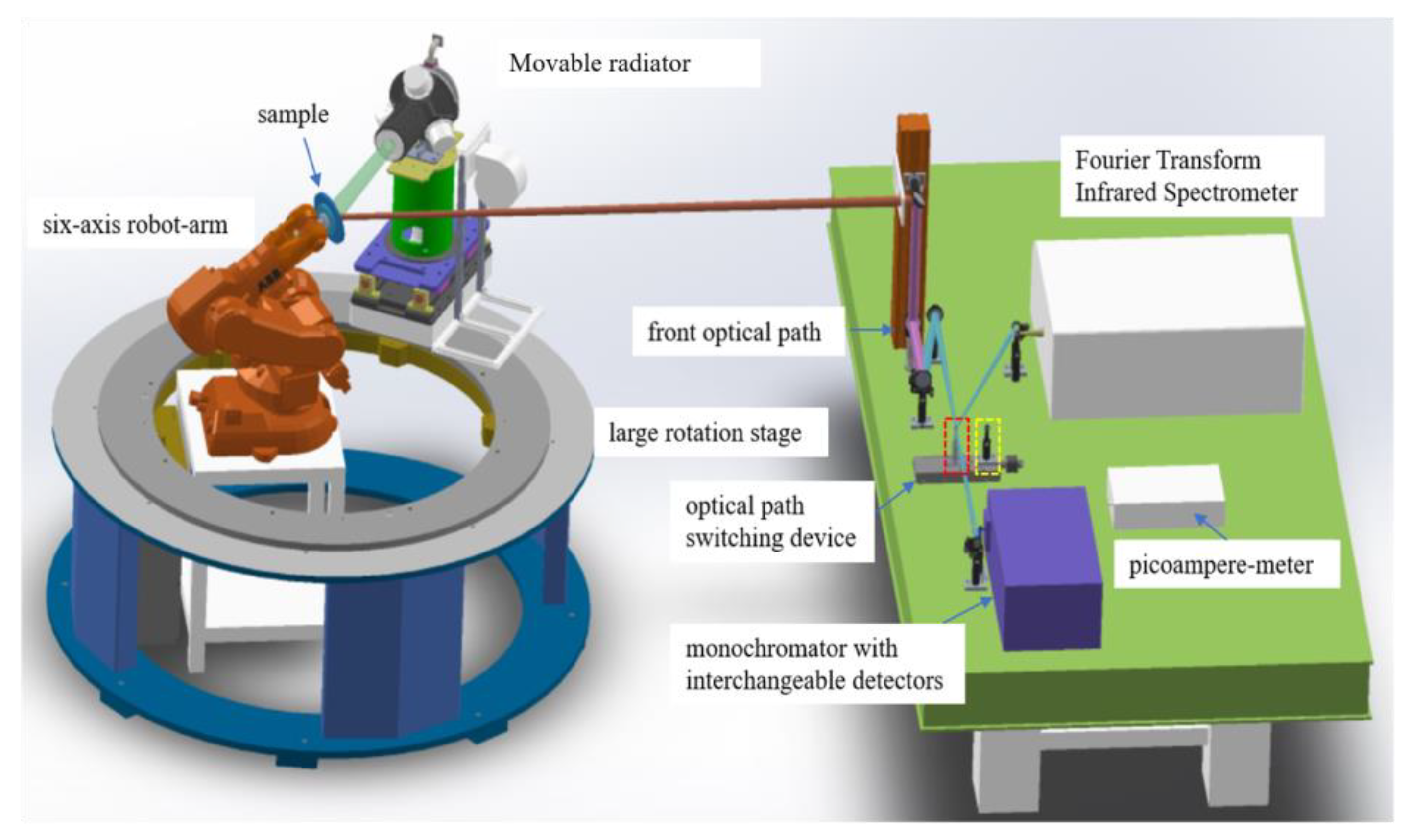
An absolute BRDF measurement facility is shown in
Figure 2. It consists of three parts: an irradiation system, a goniometer system, and a detection system. All devices are connected to the same industrial control computer. The required BRDF of a sample can be automatically measured by the control software.
3.1. Irradiation System
An integrating sphere was chosen as the radiation source to ensure that the brightness and uniformity requirements of the irradiation system were met. It also reduced the effect of polarization on the measurement results.
The inner coating of the sphere radiator is shown in
Figure 3. It was made of pressed PTFE with a reflectivity above 99%. The inner diameter of the sphere was 150 mm, and three 400 W halogen lamps were built in. The sphere was equipped with hydrocooling and air-cooling systems. The power supply was set to 1000 W (approximately 80% of the rated power) when the sphere radiator operated. A stray light hood was added in front of the sphere radiator opening to reduce the influence of stray light during measurement.
To verify the homogeneity of the sphere radiator, a special homogeneity measurement facility was built. Imaging optics for radiation at a 1:1 reproduction scale were chosen and mounted on a two-dimensional xy-translation stage. The step interval was set to 2 mm, and the scanning area covered the whole opening of the sphere radiator. The results show that the nonuniformity of the opening was less than 0.5%.
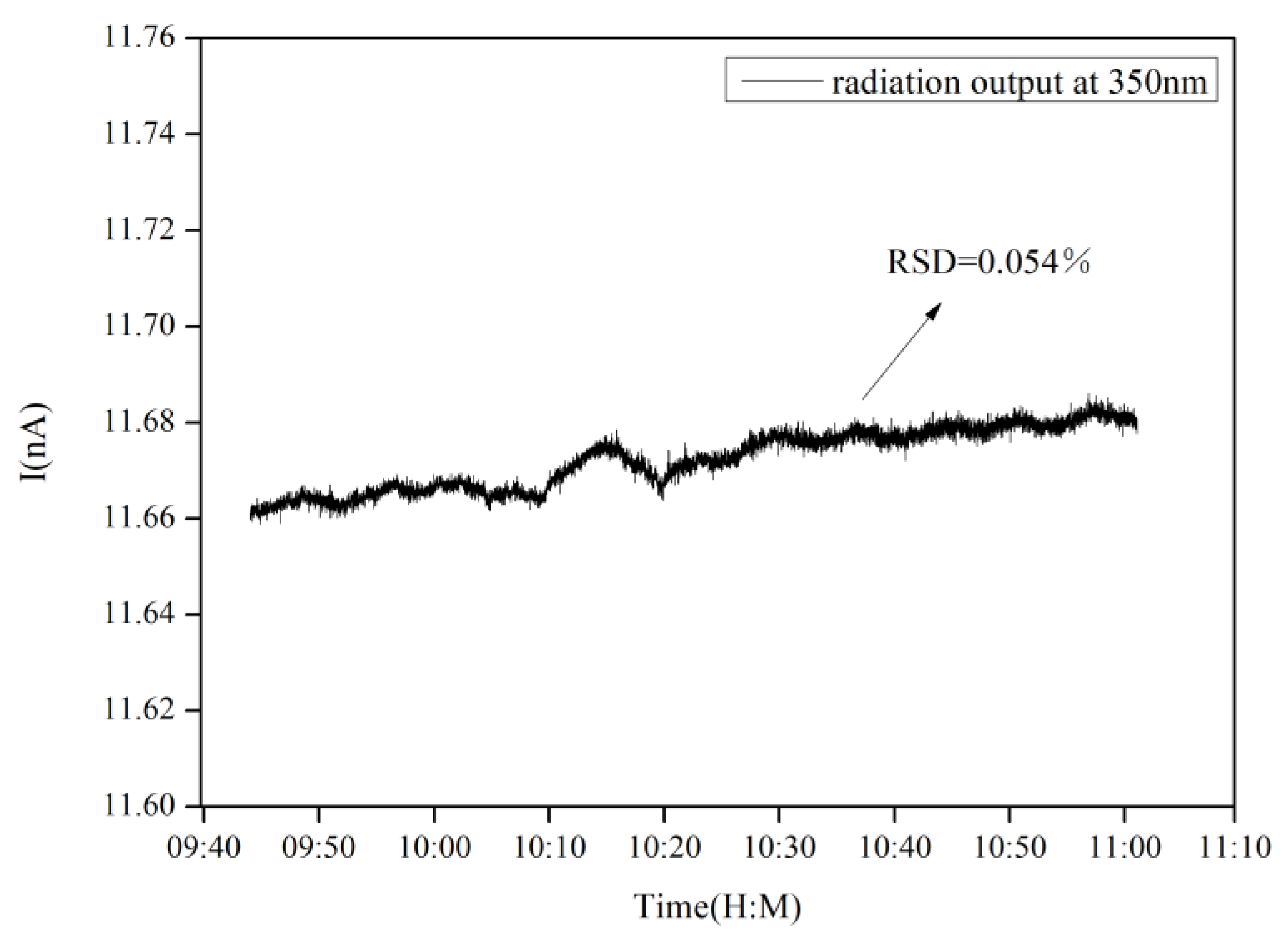
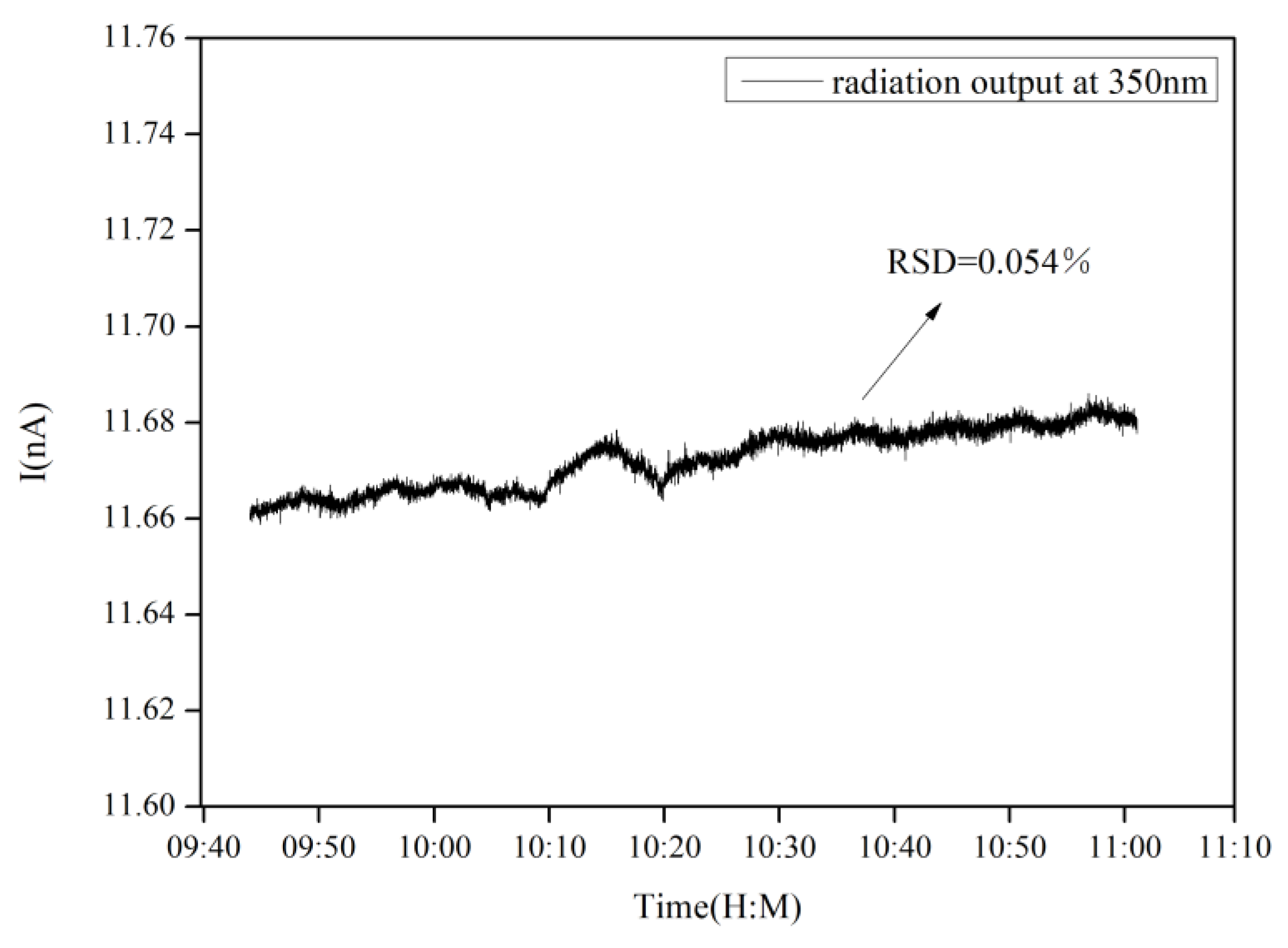
The stability of the sphere radiator could be detected by the facility’s detection system. The facility was adjusted to the position for measuring incident radiation. The output power of the high-precision current source was set to 1000 W, and the measurement wavelength was 350 nm. After 30 min of preheating, the measurement lasted 80 min with a sampling interval of 20 ms. The results are shown in
Figure 4. Stability was expressed as relative standard deviation, and the instability of the light source was less than 0.06% (80 min).
3.2. Goniometer System
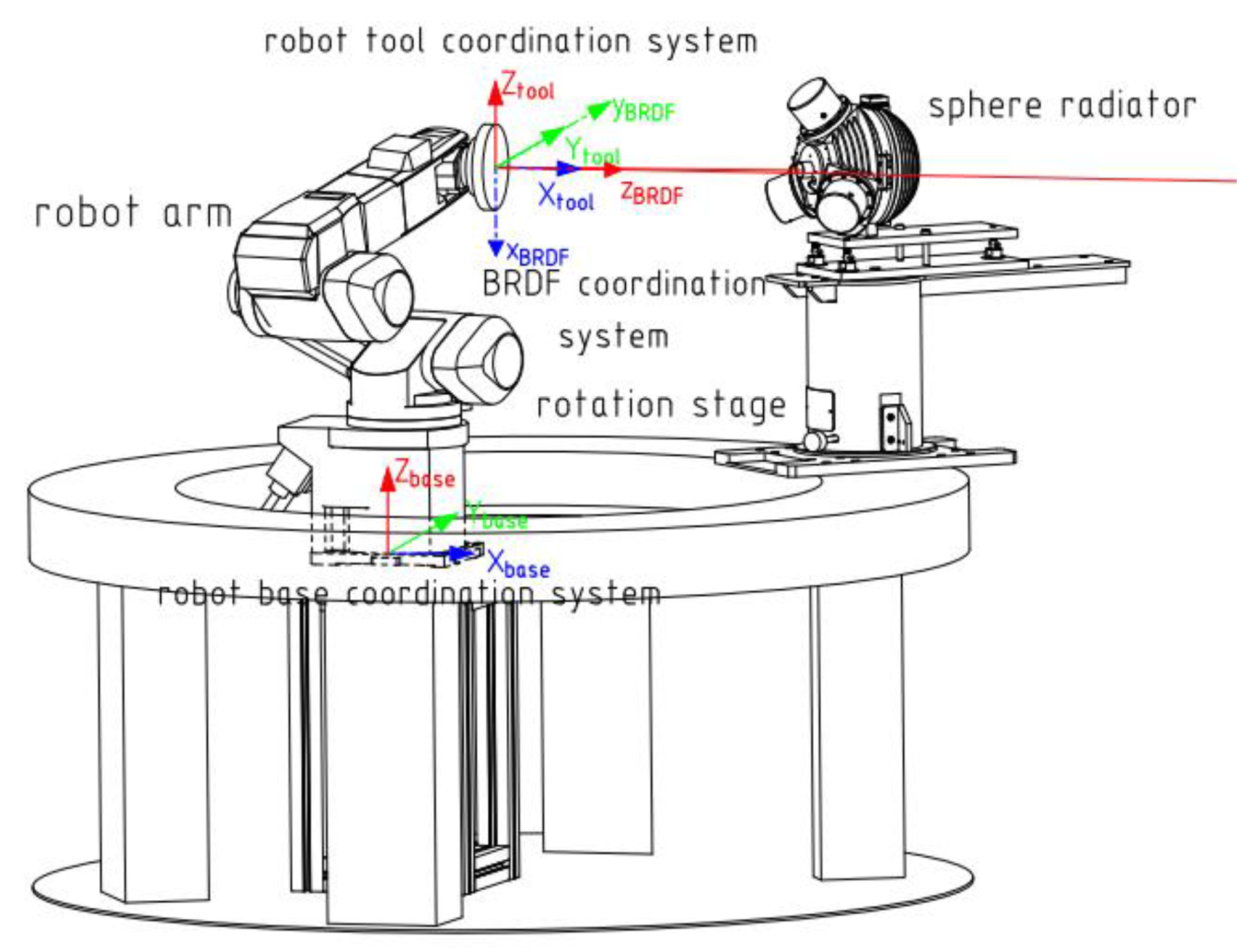
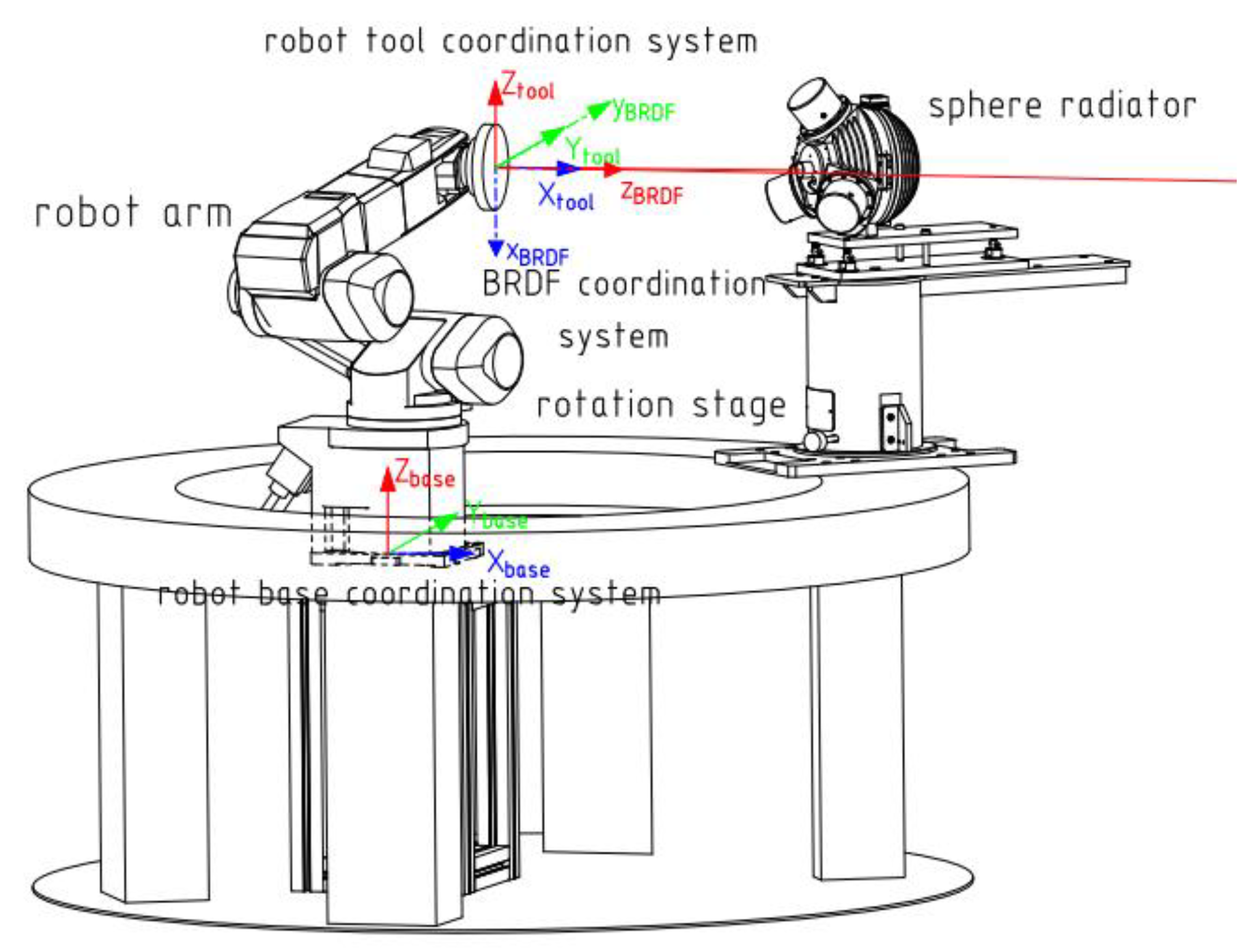
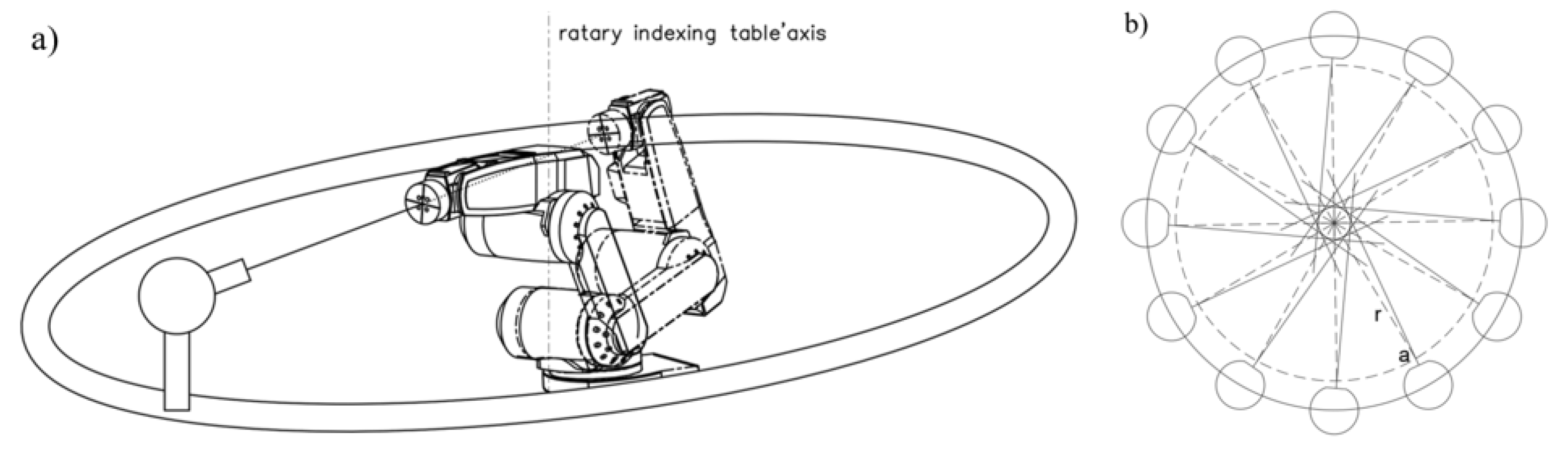
A six-axis robot arm and a large rotation stage from the goniometer system of the facility are shown in
Figure 5. The robot arm held the sample for three-dimensional rotation, and the rotation stage loaded the irradiation system for one-dimensional rotation. The detection system was fixed to ensure high-accuracy radiation measurement.
The angle ranges for BRDF measurement at the facility are shown in
Table 1.
Two coordinate systems were defined on the surface of the SD: the robot tool coordinate system XYZ and the BRDF coordinate system xyz. They both shared a common coordinate origin, which was located at the center of the sample. This point was also the intersection point of the rotation axis during the rotation stage and the centerline of the opening of the sphere radiator. The relative positions of the two coordinate systems are shown in
Figure 5.
The angle of rotation of the robot arm around the XYZ axis of the robot tool coordinate system could be defined as
, and the rotation angle of the rotation stage was
. According to the different expression relationships between the incident vector, the reflected vector and the sample normal in the two coordinate systems, the relationship between
and
could be established as follows:
For a given BRDF angle (), the rotational angle of the robot arm and rotation stage () could be calculated using Equations (6)–(9). The goniometer system was rotated based on the calculated to achieve the geometric relationships required for the measurement.
3.3. Detection System
An SD can reflect the incident radiation into the hemisphere so that only a small portion of the incident radiation is collected during measurement. The detection solid angle of the facility was very small, approximately 0.003 sr, and depending on the different incident angles of the radiation source, there were approximately four orders of magnitude of difference between the incident radiation and the reflected radiation. For different measurement wavelengths, the difference could even exceed four orders of magnitude. In this large dynamic range, non-linearity in the detection system needed to be determined and corrected.
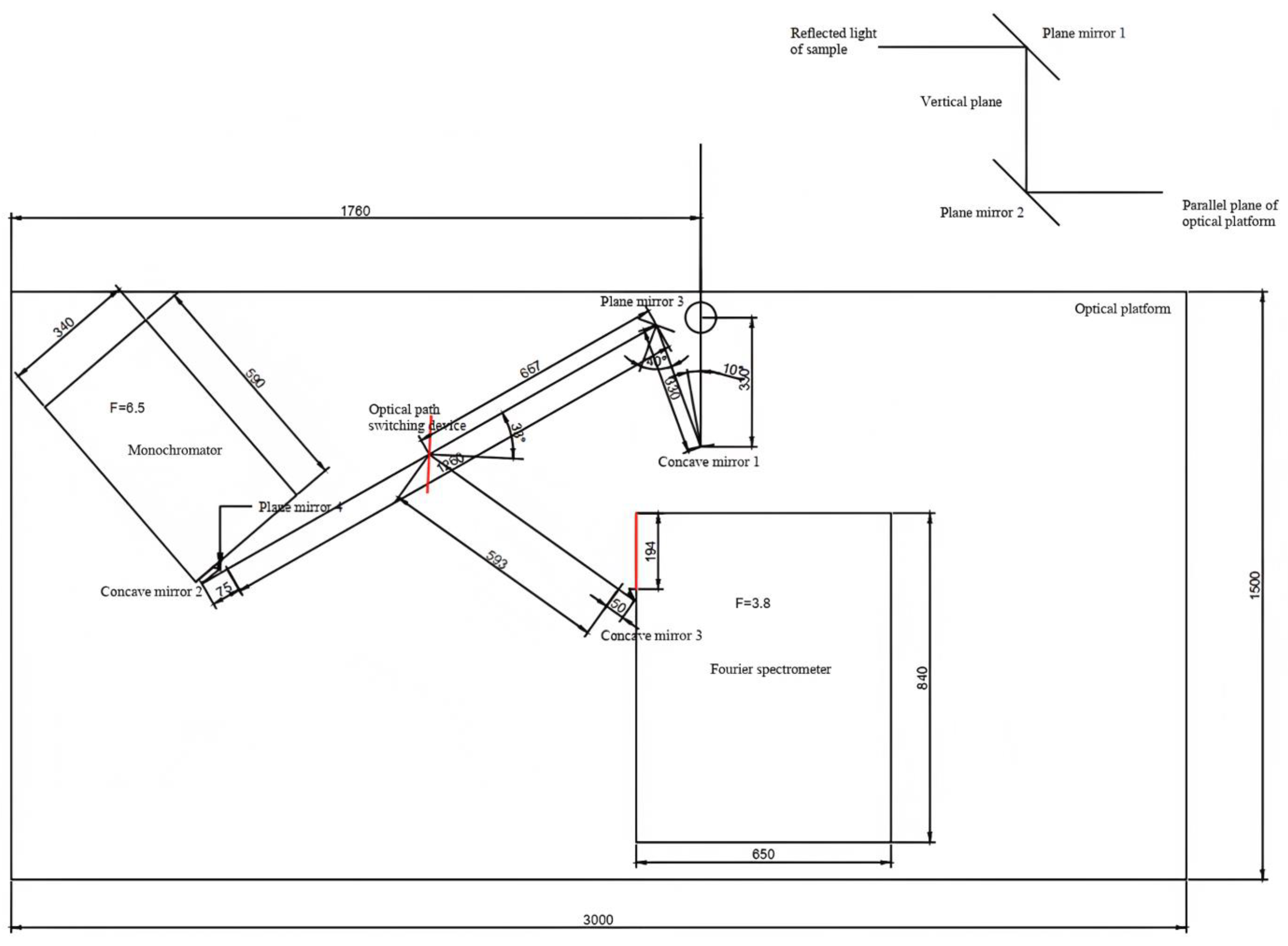
The detection system had two configurations. One was a combination of a monochromator, detectors, and a picoamperemeter. The other was a Fourier transform infrared (FTIR) spectrometer. These two detection devices shared the same front optical path systems. Depending on the wavelength required, a combination of a plane reflector and an electric translation platform was used to switch the optical path.
The front optical path is shown in
Figure 6. It was composed of five plane mirrors, three concave mirrors and one electric translation platform. The radiation reflected from the sample was parallel to the optical platform plane after being reflected by plane mirror 1 and plane mirror 2 and then converging on concave mirror 1. It was then reflected by plane mirror 3 to the optical path-switching device, which was composed of an electric translation platform and a plane mirror. After passing through the optical path-switching device, the concave mirror converged the light to the optical inlet of the monochromator or FTIR spectrometer.
The electric translation platform controlled the back-and-forth movement of the plane mirror. From
Figure 2, when the plane mirror was in the red dashed box position on the optical path-switching device, it reflected the radiation to the optical inlet of the FTIR spectrometer. Additionally, when it was completely removed (in the yellow dashed box position), the radiation entered the optical inlet of the monochromator.
The performance of the detection devices in these two configurations was as follows:
Monochromator, detector and picoamperemeter:
The monochromator had a spectral resolution of approximately 3 nm at 350 nm to 600 nm and 6 nm at 600 nm to 1700 nm. Depending on the different measurement wavelengths, two types of detectors were equipped: Si (350 nm to 1000 nm) and InGaAs (1000 nm to 1700 nm, two-stage TE cooled, −40 °C) detectors. All photoelectric signals were detected by the picoamperemeter, and the measurement results were transmitted to a computer for data storage and calculation.
FTIR spectrometer:
The FTIR spectrometer was a VERTEX80 [
25] from the BRUKER company. In the measurement facility, the InGaAs detector was selected as the detector for the VERTEX80. The measurement spectral range was set at 11,764 cm
−1 (850 nm) to 4148 cm
−1 (2410 nm), and the spectral resolution was set at 64 cm
−1 (4.6 nm to 36.6 nm). This resolution was selected because of the spectral characteristics of the SD’s reflectivity (spectral flatness) and the improvement in the signal-to-noise (SNR) ratio when measuring the reflected radiation. In the process of inverse Fourier transform, the Blackman Harris 4-Term was used as the apodization function; the zero filling factor was 2; the power spectrum mode was selected for phase correction; and the absolute largest value was selected for the peak position retrieval mode.
When measuring the reflected radiation, the circuit amplification coefficient used by the FTIR spectrometer was different from that used for the incident radiation to ensure a sufficiently high SNR. The calculation method for scaling factor
was as follows:
where
and
represent the DN of the FTIR spectrometer for the reflected radiation at 0°/45° and incident radiation, respectively, and
and
represent the DN of the InGaAs detector for reflected radiation at 0°/45° and incident radiation, respectively.
The DN ratio of the incident radiation and reflected radiation from the InGaAs detector at 0°/45° was compared with the DN ratio from the FTIR spectrometer under the same conditions. Data at the 1200 nm and 1300 nm bands were selected for calculation. The average scaling factor was 99.10.
3.4. System Calibration
3.4.1. Geometric Calibration
The geometric calibration of the facility was divided into two main aspects: determining the initial position (the rotation center of the robot arm and the origin of the rotation stage) of the BRDF measurement and verifying the uncertainty of the rotation angle.
The rotation center of the robot arm was located at the intersection point of the rotation axis of the rotation stage and the normal to the center of the sphere radiator opening. Before measuring, the initial position of the sample needed to be determined.
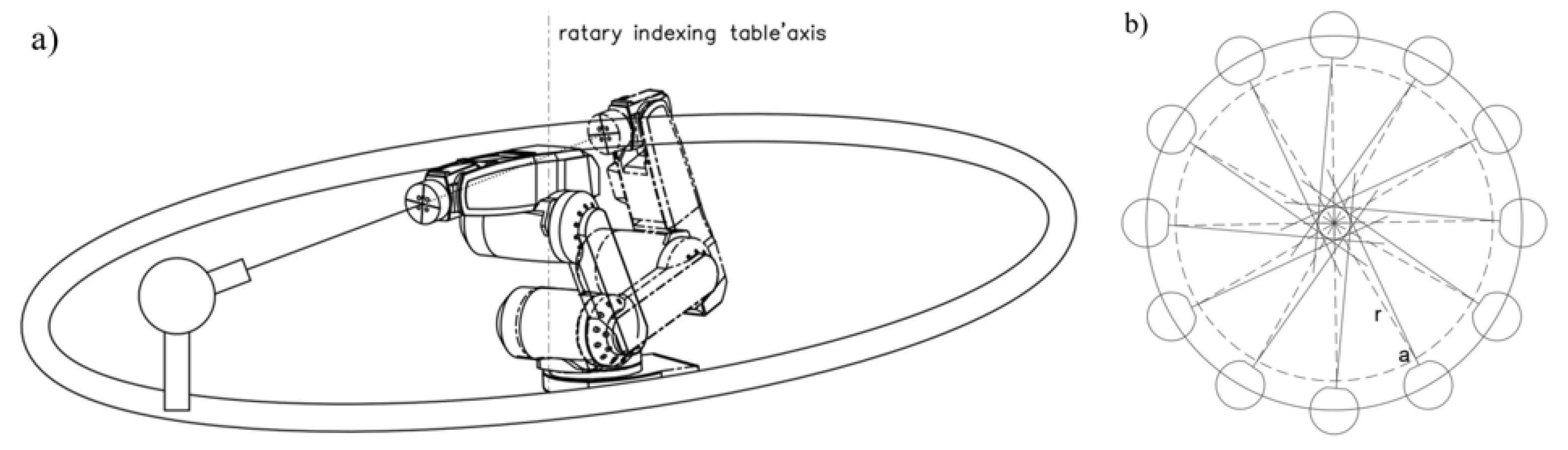
With the laser beam emitted from the sphere radiator opening as the indicator and the robot arm as the measuring tool (the measuring principle is shown in
Figure 7a), the space linear equation of the rotation stage was obtained by measuring the beam emitted from the sphere radiator opening at different angles (the measuring schematic is shown in
Figure 7b), and the transformation relationship between the robot’s base coordinate system and the laboratory coordinate system was preliminarily established. Then, the laser beam was adjusted perpendicular to the rotation axis of the rotation stage, and the position of the laboratory coordinate origin and the changing relationship between the two coordinate systems were determined according to the position of the incident laser beam on the
Y-axis of the tool coordinate system and the axis equation. A calibration model of the instrument was established. The position and attitude of the rotation center in space were calculated, and the initial position of the sample was determined. This calibration method is described in great detail in the literature [
26].
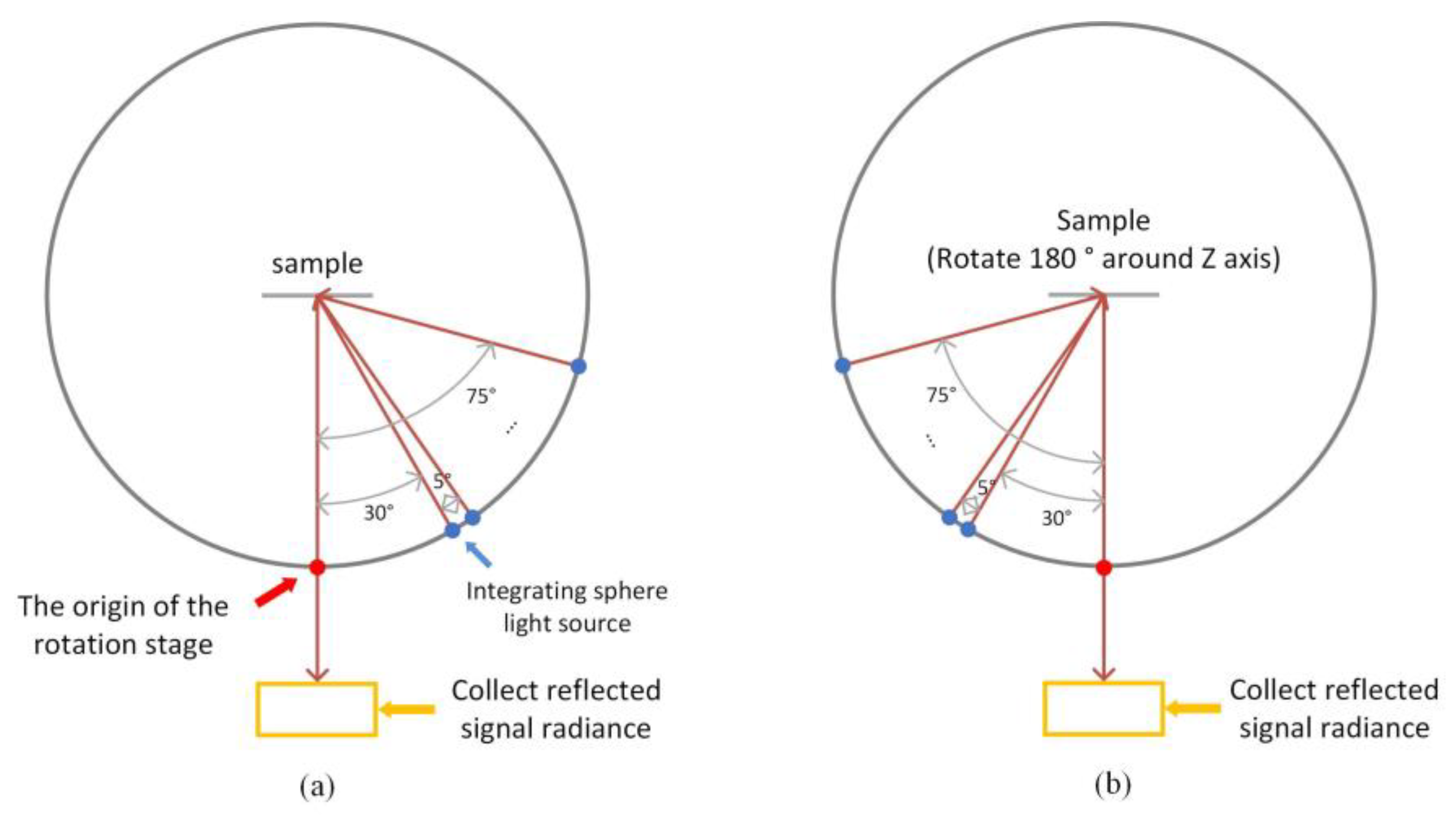
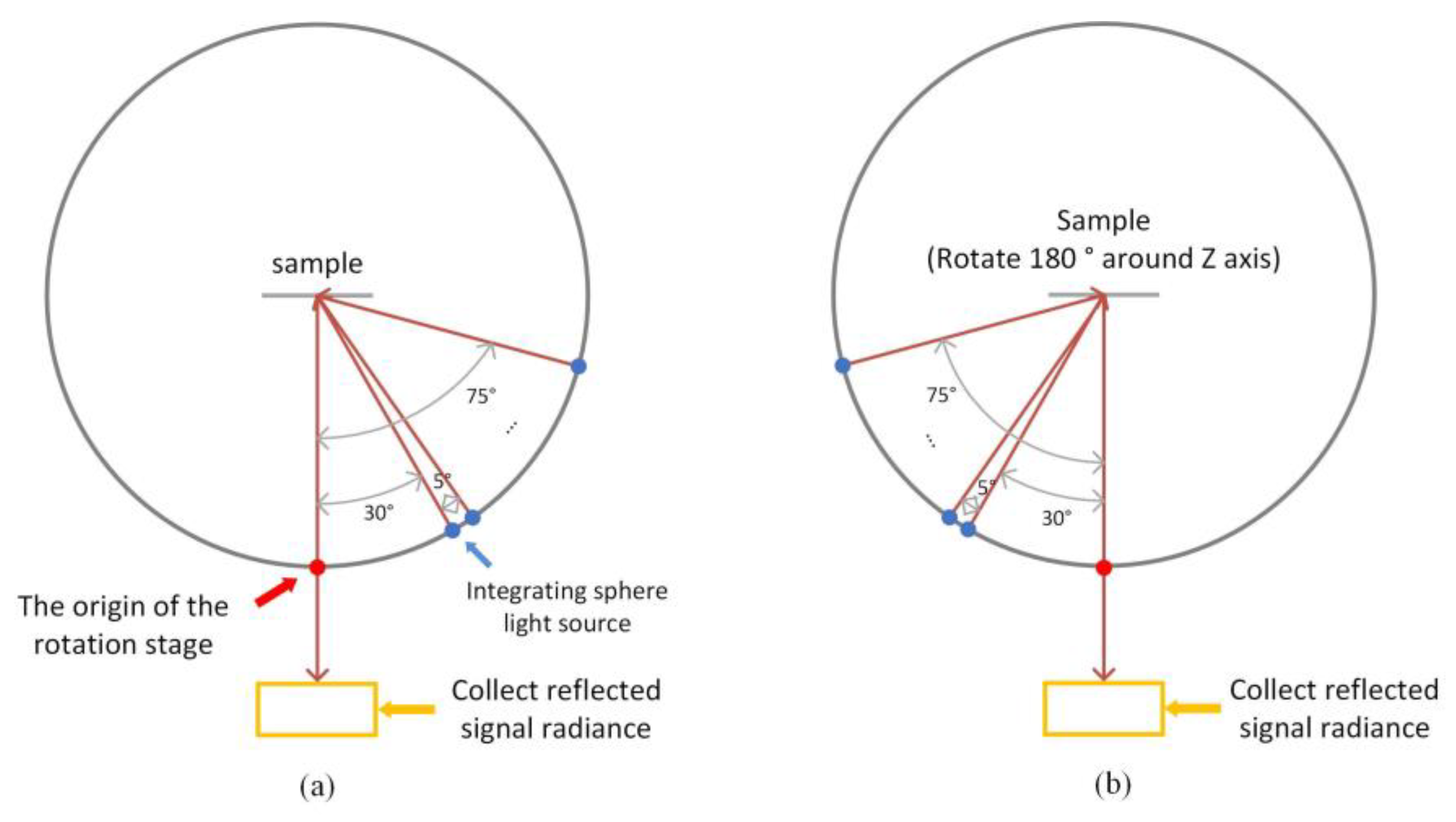
The origin of the rotation stage (red points marked in
Figure 8) was corrected using a coordination measurement with the overall system. The radiation source was placed at the origin before correction, and the sample held by the robot arm was placed at the initial position determined and described in the previous paragraph. The radiation source was rotated counterclockwise by 30° to a starting point. Then, the reflected radiation was collected at 5° intervals. The measuring schematic is shown in
Figure 8a. After acquisition was complete, the radiation source was returned to the origin, and the sample was rotated 180° around the
z-axis by the robot arm. The radiation source was rotated clockwise 30° to the starting point. Then, the reflected radiation was collected again at 5° intervals. The measuring schematic is shown in
Figure 8b. A schematic diagram of the whole correction operation follows:
If the angle of counterclockwise rotation was
, the angle of clockwise rotation was
, and the origin angle before correction was
, then,
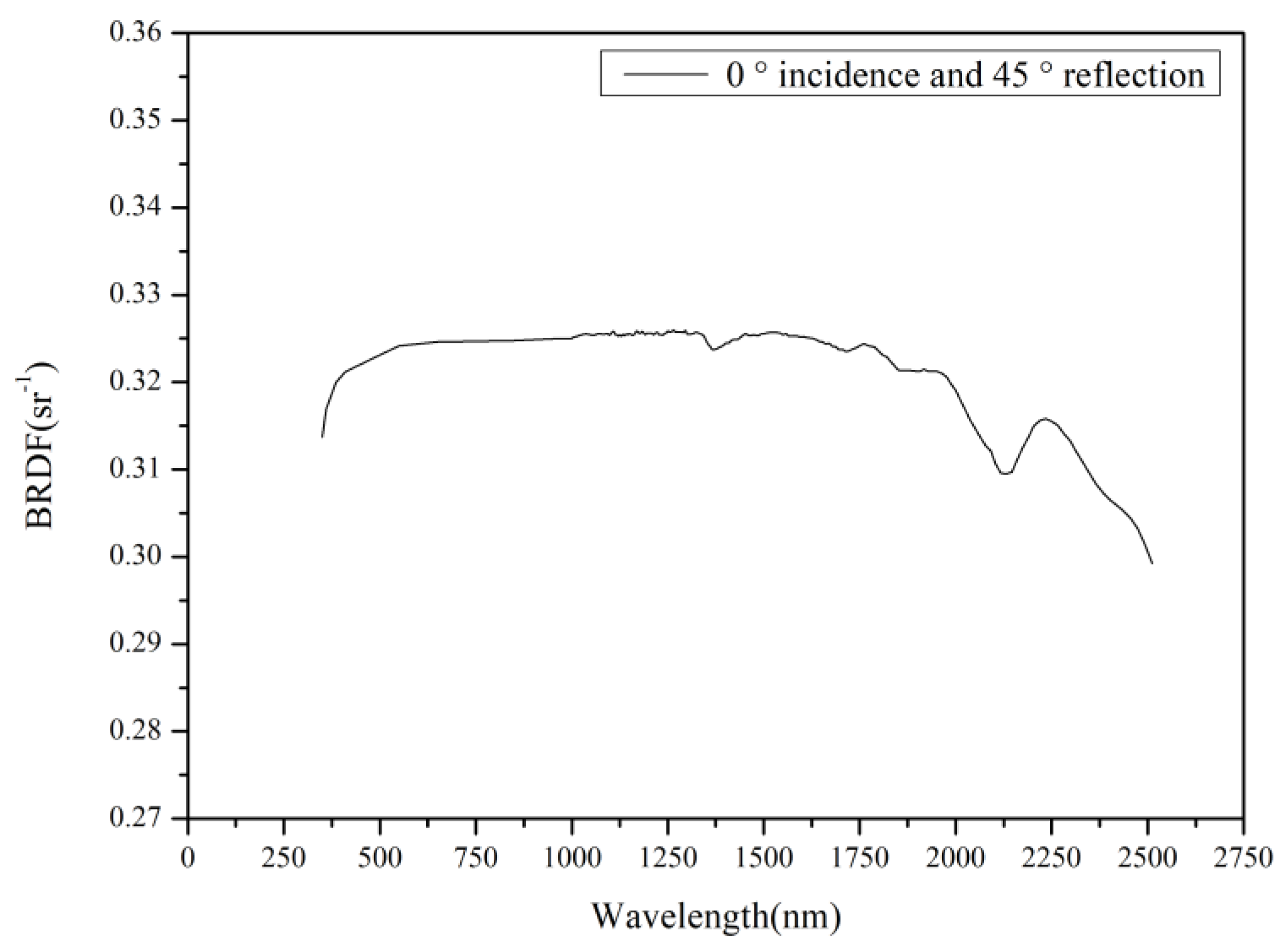
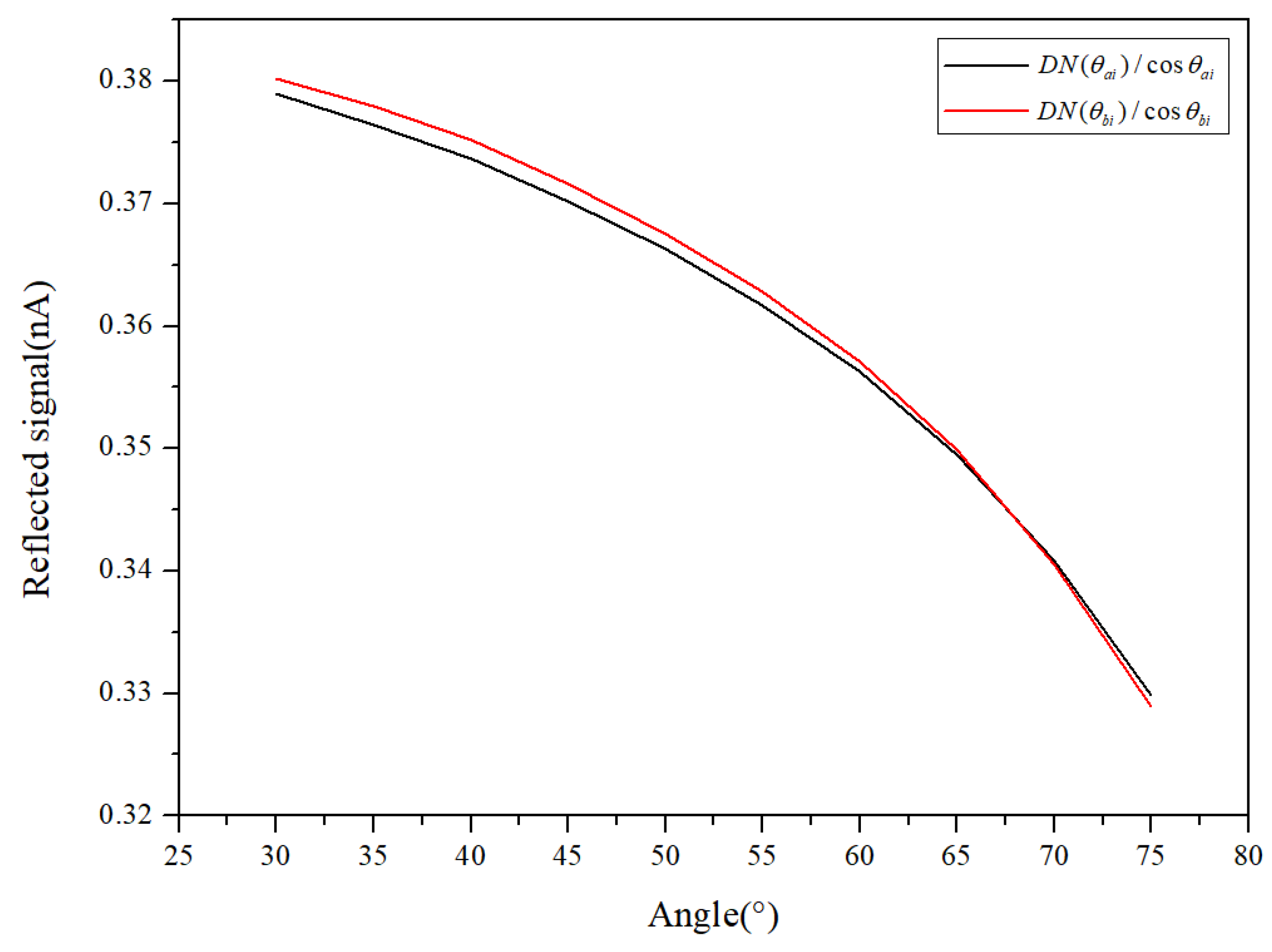
The correction value at the origin of the rotation stage could be calculated using Equation (11). After correction, the reflected radiation is shown in
Figure 9. The relative deviation of
and
was less than 0.2%.
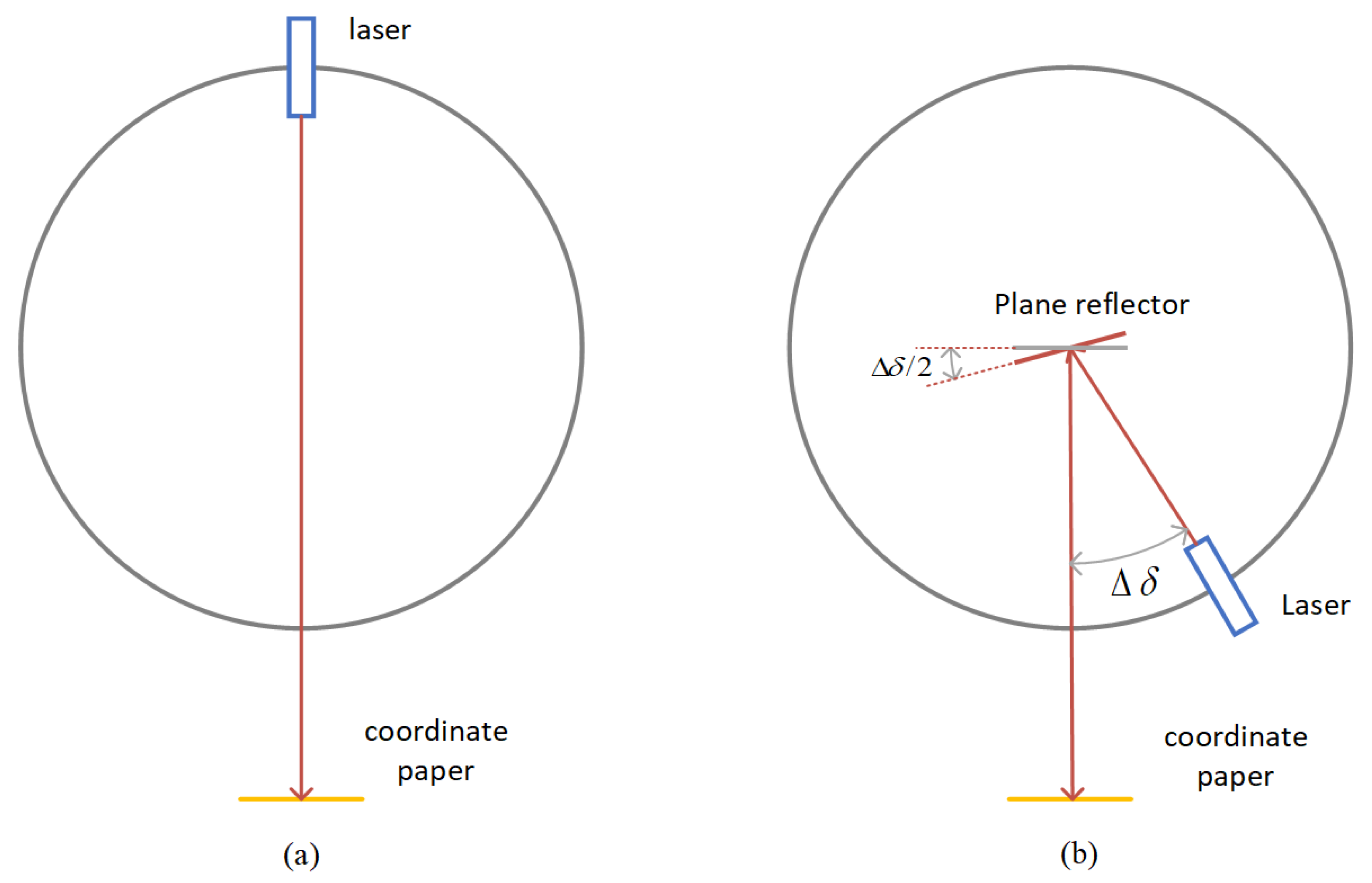
A detection method based on the principle of specular reflection was used to verify the angular uncertainty of the goniometer system. The origin of the coordinate paper was placed at the center spot of the incident light beam after rotating the radiation source 180° counterclockwise. Assuming that the counterclockwise rotation angle of the radiation source was
, the robot was adjusted so that the reflector rotated
about the
Y-axis, and the position of the center spot of the reflected light beam was recorded at this time. The experimental diagram is shown in
Figure 10.
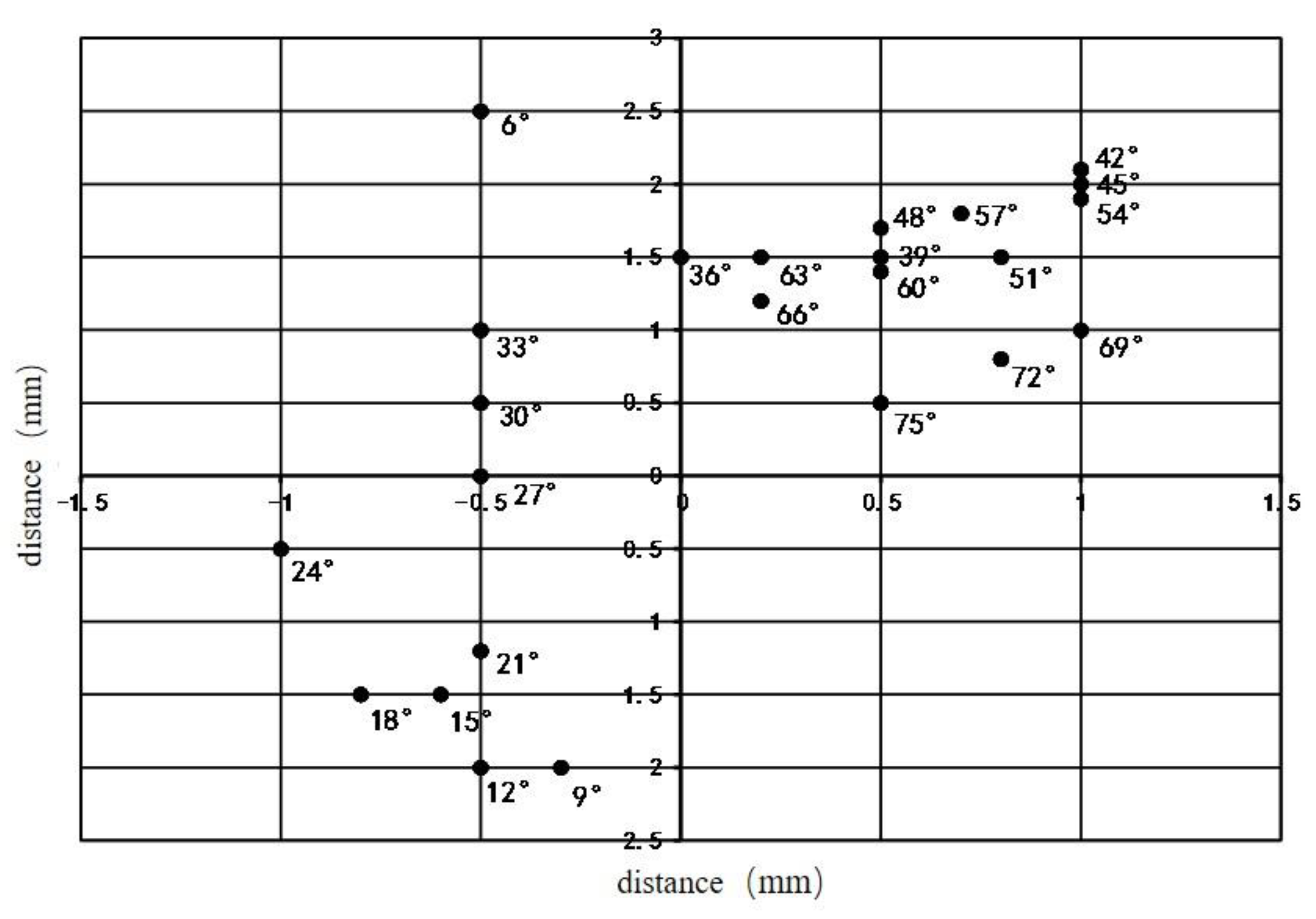
The range of
was set to 6°–75°, and measurements were taken every 3°. The distance between the coordinate paper and the rotation center was 1900 mm. The experimental results are shown in
Figure 11, and the incident angle when measuring the spot is marked beside each point.
The angle error
could be expressed as
where
represent the horizontal and vertical coordinates, respectively, of the reflected light spot on the coordinate paper at the current angle;
represents the distance between the coordinate paper and the rotation center. Calculating the results based on
Figure 11 and using Equation (12), the maximum deviation angle was 0.0769°; this means that the angular accuracy of the goniometer system was less than 0.1°.
3.4.2. Nonlinear Calibration of the Detection System
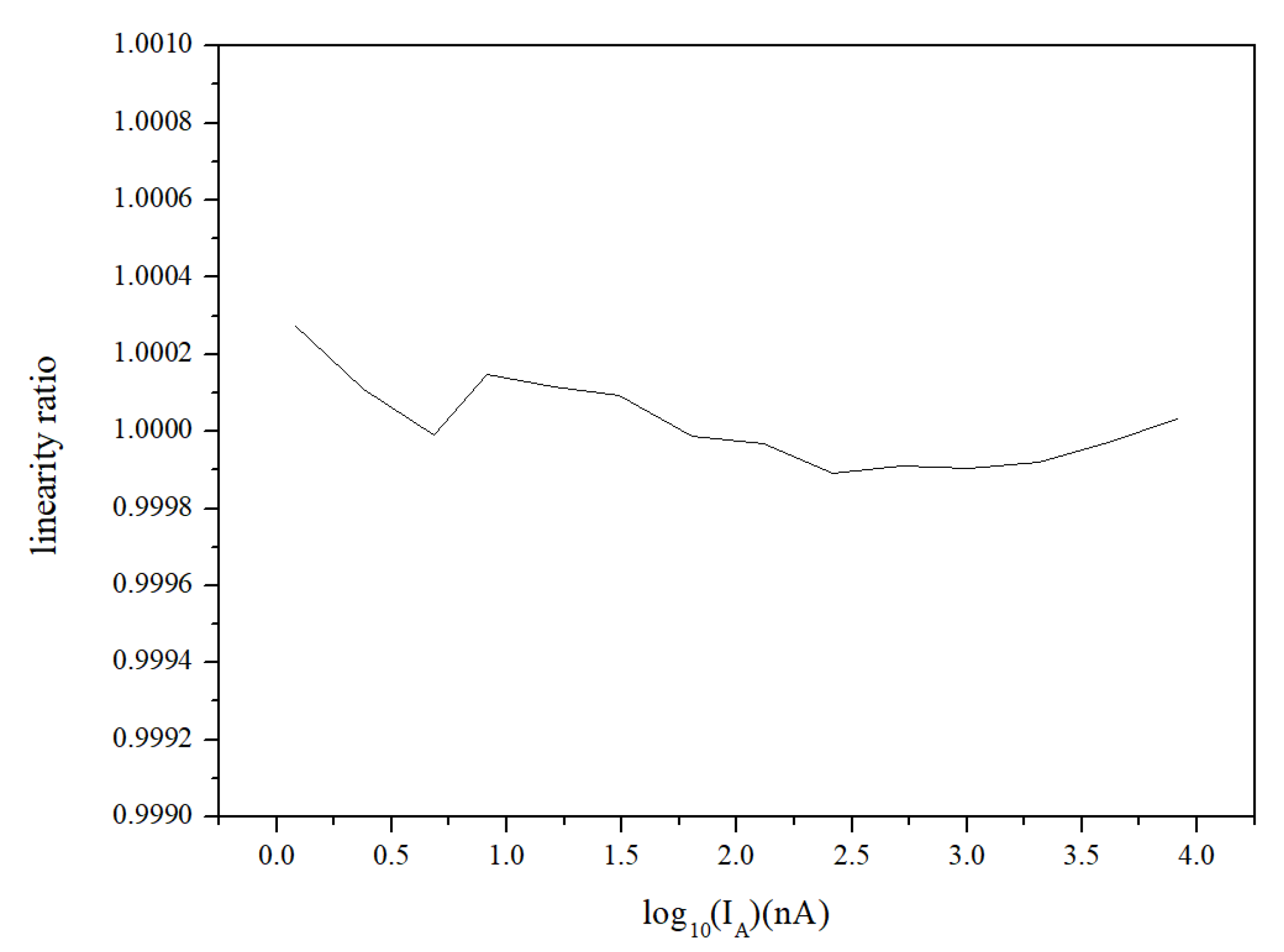
350 nm to 1000 nm:
A method based on the flux addition of two light-emitting diodes (LEDs) in an integrating sphere was used to detect nonlinearity in the detector system [
27]. The measurement range was from 12 pA to 364 nA, which matched the dynamic range of the facility. The measurement results are shown in
Figure 12.
1000 nm to 2400 nm:
The linear uncertainty of the FTIR spectrometer as measured by the manufacturer was 0.02%.
3.5. Absolute Measurement Workflow for the Facility
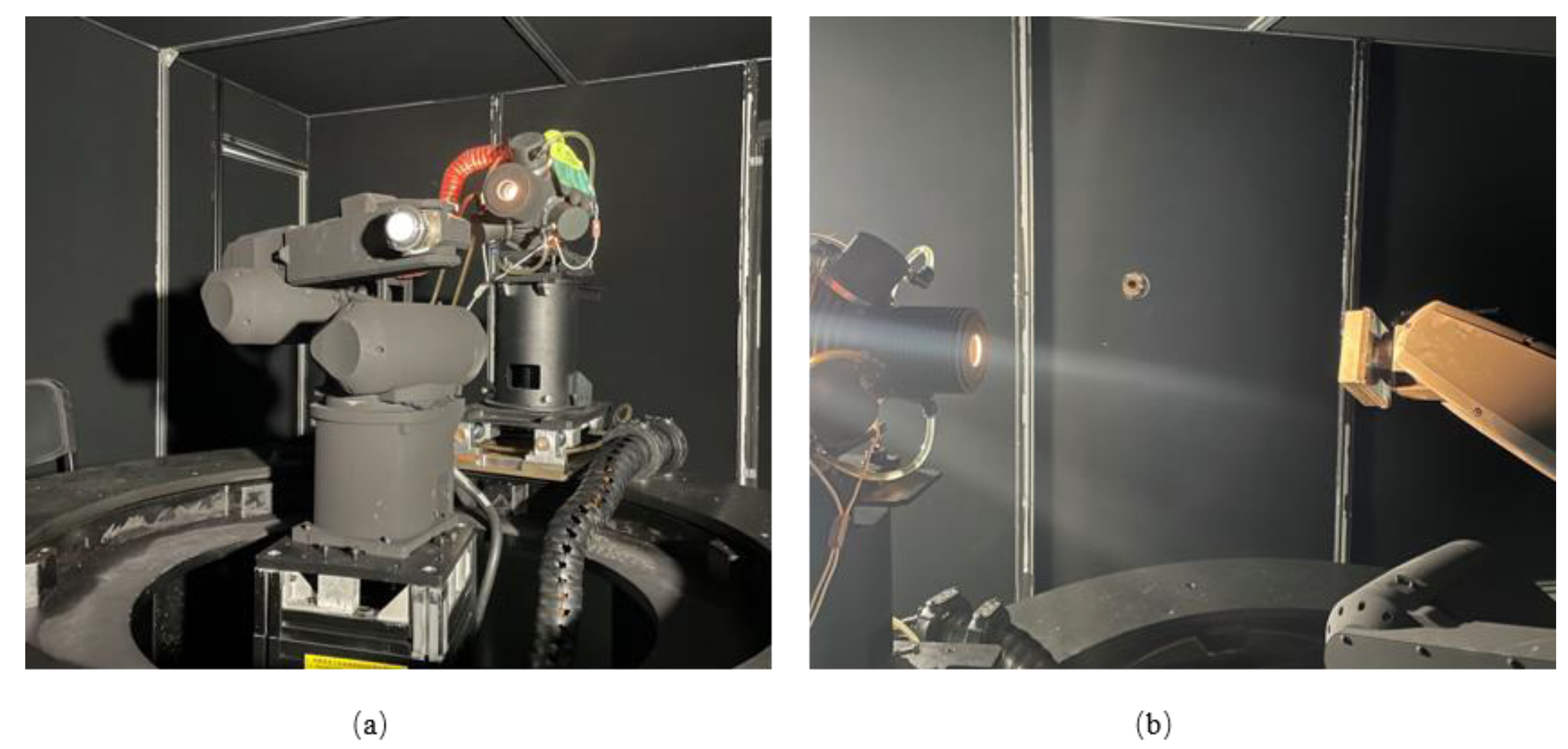
The measurement steps for the facility are outlined as follows.
First, the robot held the sample and moved it to the avoidance position, and the radiation source was rotated 180° counterclockwise from the origin of the rotation stage. The incident radiation at the required wavelength was measured. Then, the software controlled the radiation source and the sample to the position required for measurement and measured the reflected radiation from the sample. After the reflected radiation measurements were complete, the facility returned to measure the incident radiation again. The software could control the acquisition frequency of the incident radiation by setting the number of reflected radiation acquisitions. Generally, the number of reflected radiation acquisitions was set to 10 to ensure that the incident radiation measurement interval did not exceed 15 min. Photos of the measurement process are shown in
Figure 13a,b.
4. BRDF Measurement by the SD for On-Board Calibration
4.1. Determination of the SD BRDF Measurement Angle
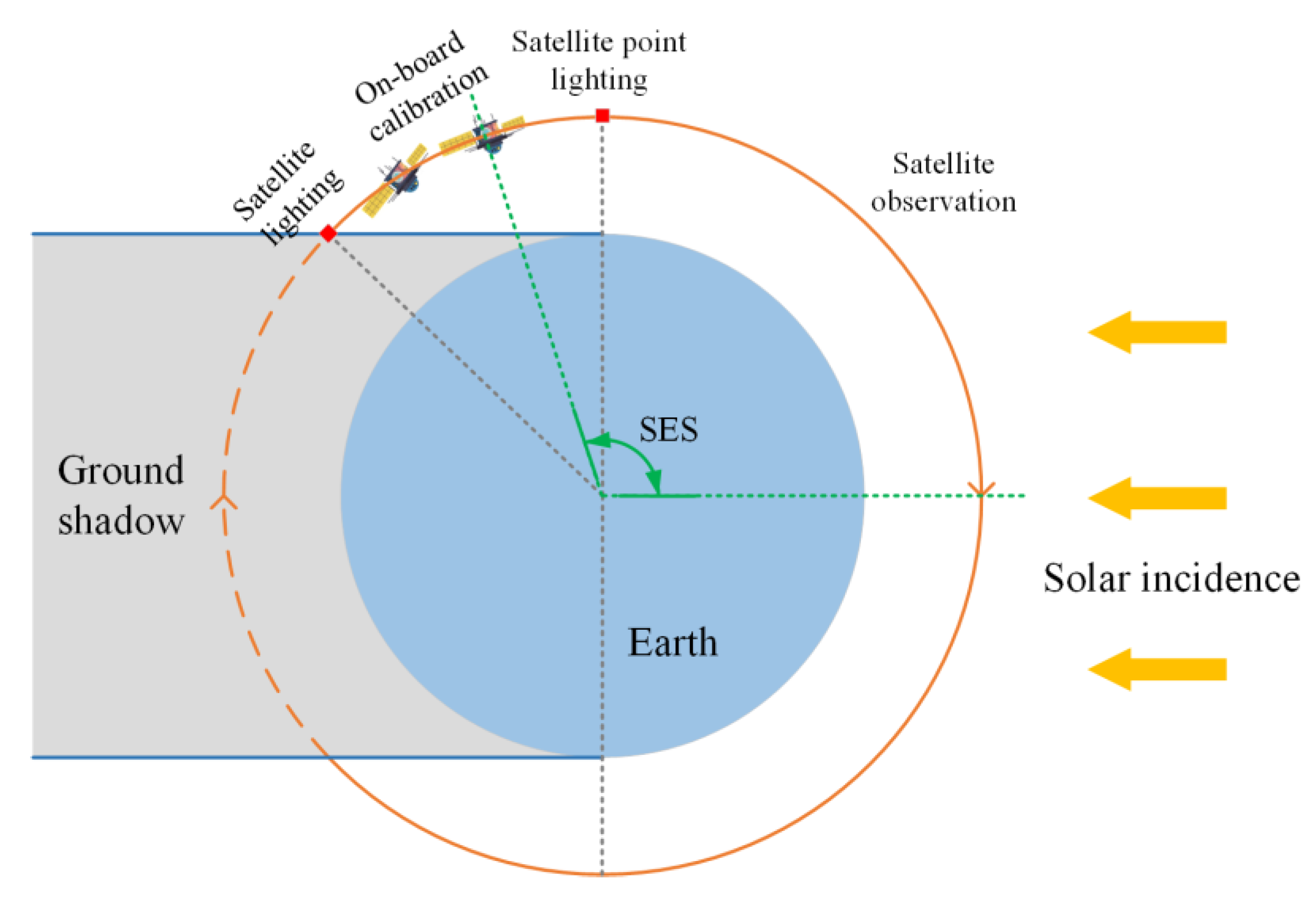
On-board calibration is generally conducted after satellite lighting and before subsatellite point lighting (
Figure 14). Based on the analysis of observations from hyperspectral instruments on international satellites, on-board calibration is susceptible to scattered and reflected stray light from the Earth and the atmosphere. The appropriate Sun–Earth–satellite (SES) angle at on-board calibration times is selected to reduce this influence. For example, the SES angle for on-board calibration was just above 105° on the Greenhouse Gases Observing Satellite (GOSAT) [
28].
After determining the calibration time on the satellite and the satellite orbital parameters, the elevation angle and azimuth angle of the incident beam were also determined. According to the design requirements of an on-board calibration facility based on an SD, the direction of the central axis of the payload (the observation direction) could also be determined at the calibration time.
The attitude of the SD was determined from the vectors of the incident and observation directions. It was required that the zenith angles of the incident and observation directions be as small as possible, and mirror positions of the incident and observation azimuth angles should be avoided.
However, if the angle between the incident and observation vectors was large, the zenith angles of the incidence and observation directions could not be reduced, no matter how the SD was placed. If the zenith angle in the observation direction was too large, the size of the optical surface of the SD would increase in order to ensure that the whole detector could be covered. An oversized SD takes up a large space, which affects the design of other systems in the satellite. Therefore, it is common to prepare a design for a large observation zenith angle and a small reflection zenith angle.
4.2. Improved Data Processing Method Based on Reciprocity Theorem for Measuring Large Angle BRDF
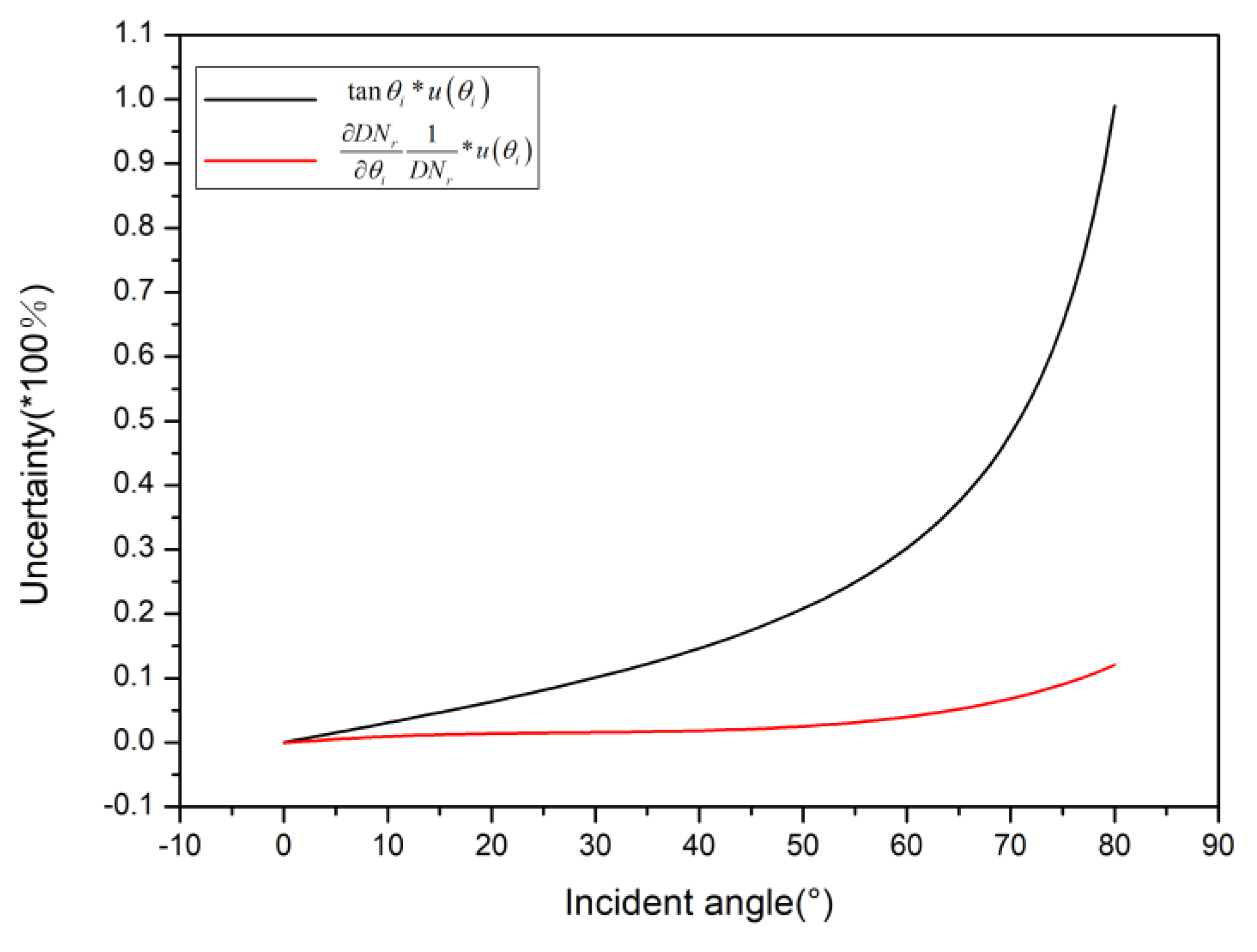
According to Equation (5), the uncertainty of an absolute BRDF measurement could be related to the uncertainty of the incident angle, and the relative uncertainty [
29] component associated with the incident angle (
) was
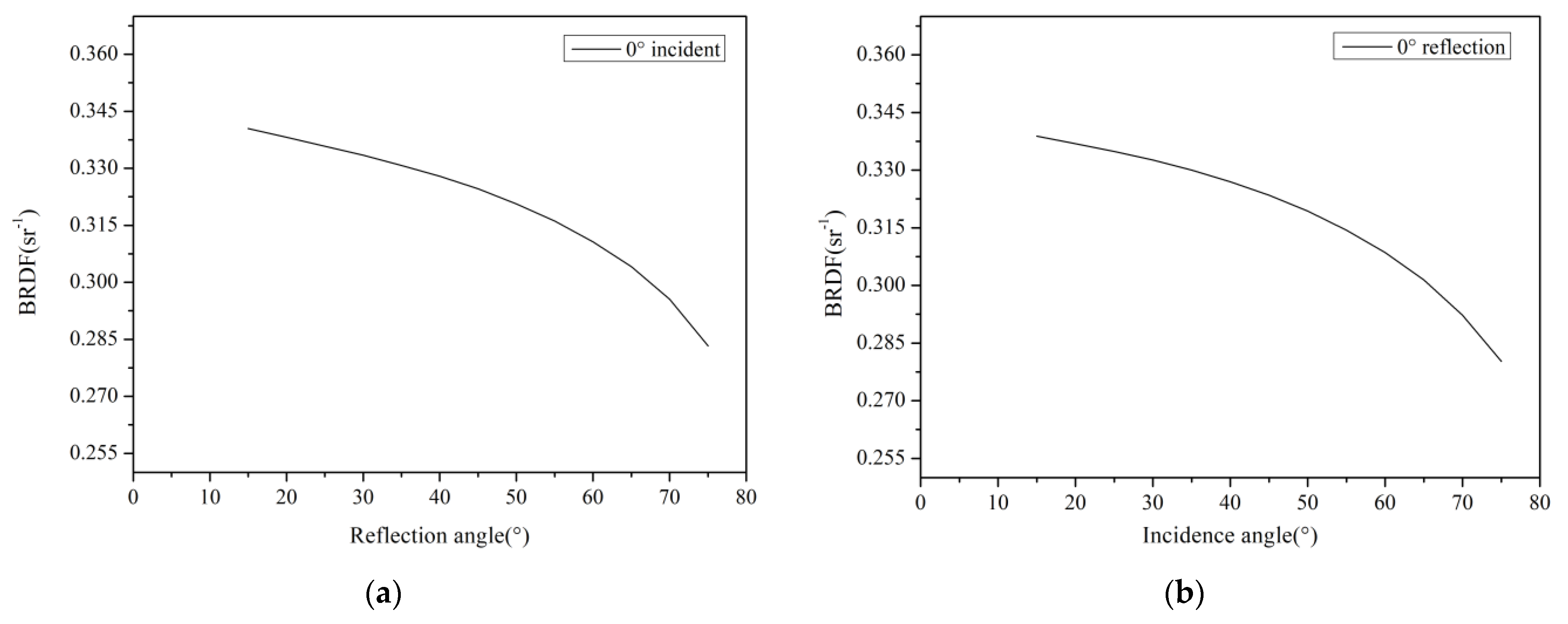
Assuming that
, the trend of
and
with
could be calculated as shown in
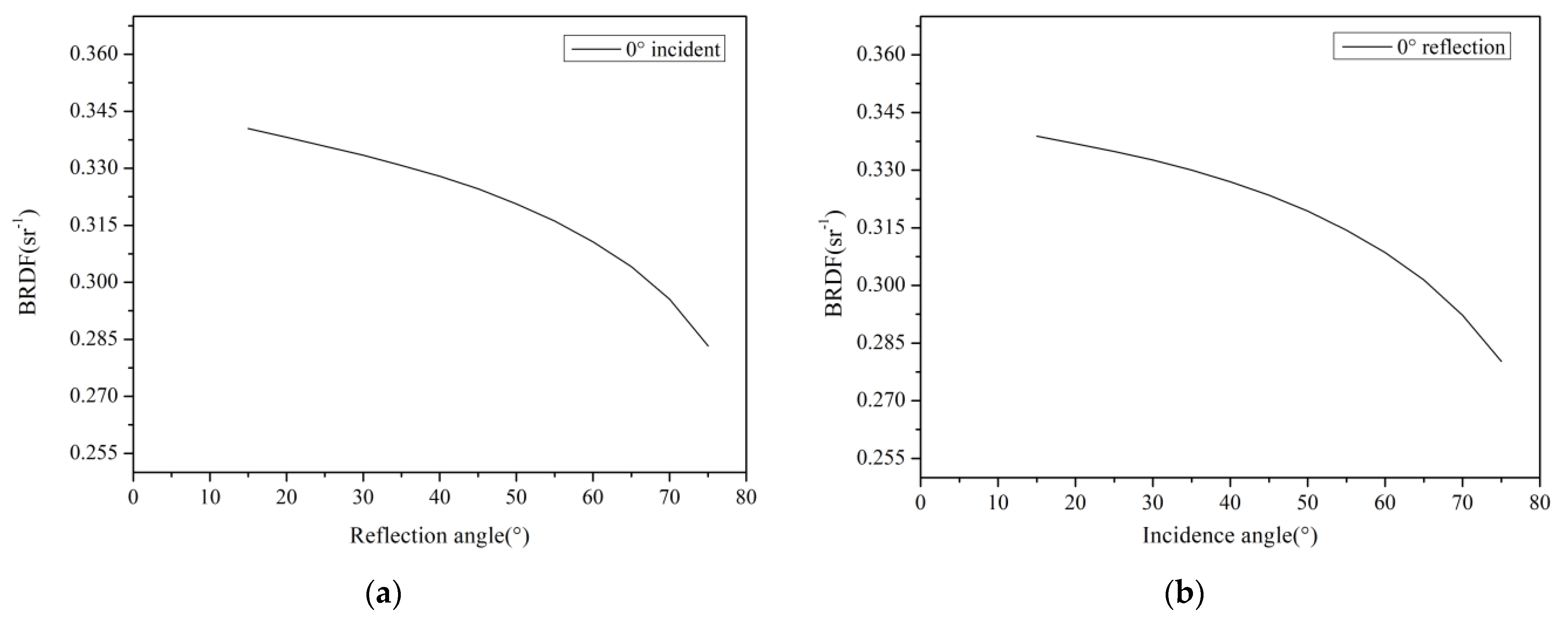
Figure 15. Note that the results here are for pressed or sintered PTFE.
was obtained by fitting data from a 10° to 75° (5° interval) incident zenith angle and 0° reflected zenith angle. It was obvious that the greater the incident angle, the greater
and
were. At an 80° incident angle,
when
, which caused a significant impact on BRDF measurement.
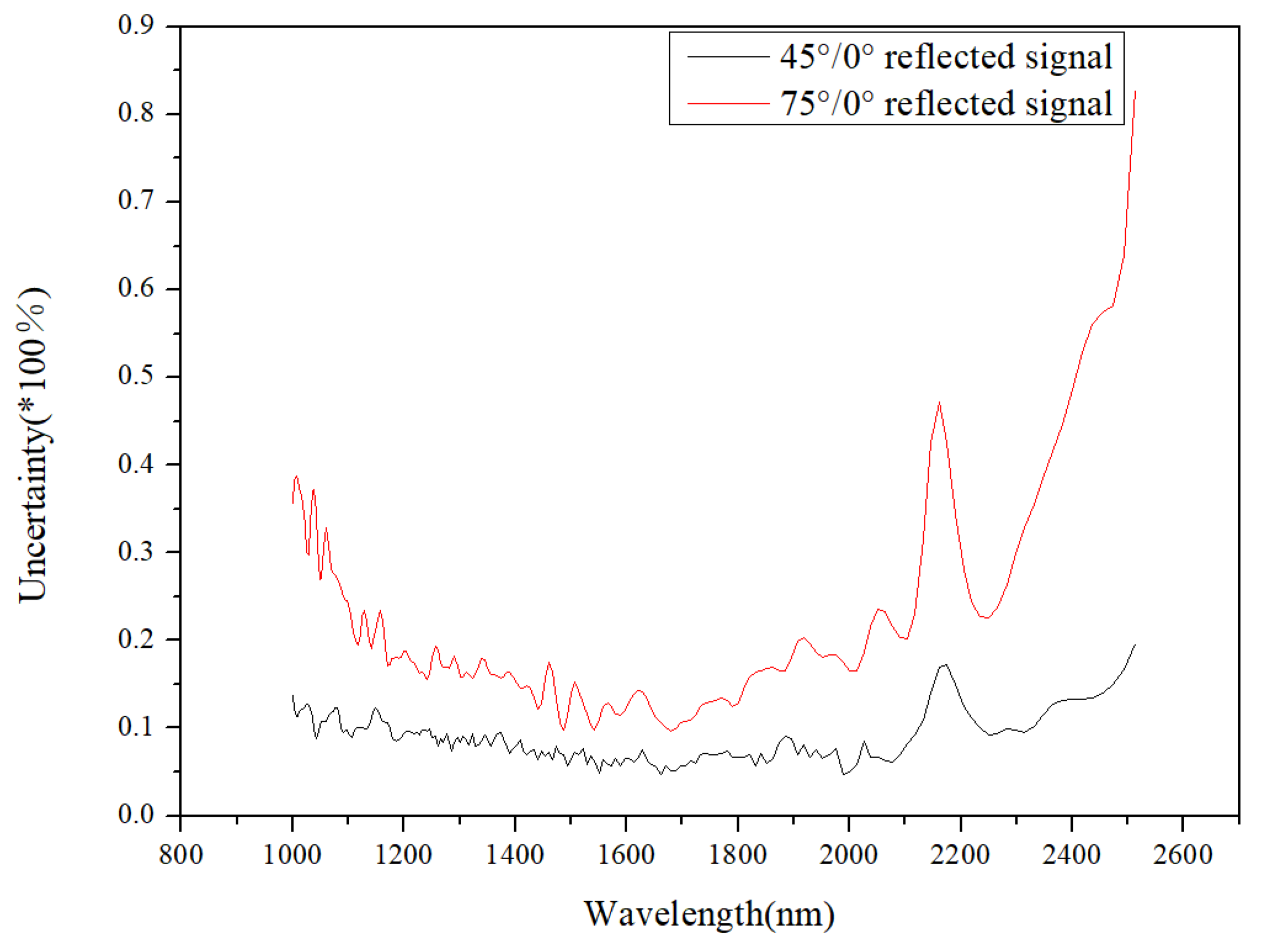
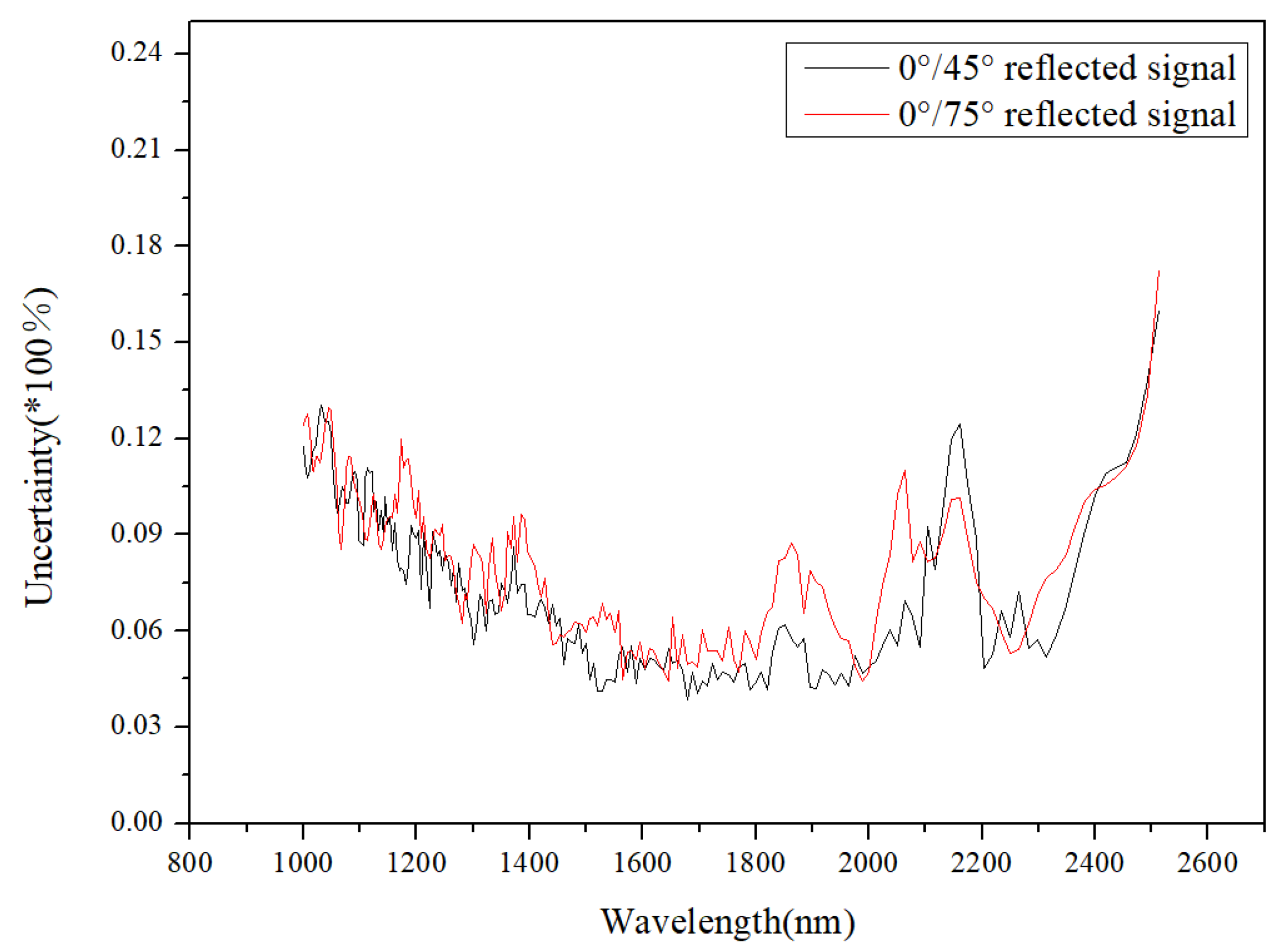
For pressed PTFE, the angle had a small effect on . In the extreme case of large incident and reflected angles, the relative uncertainty of the reflected radiation component associated with the angle was less than 0.15% when . At large incident angles, the effect of the angle’s uncertainty on was much smaller than that on . Therefore, an improved data processing method for measuring the BRDF at a large angle was designed. This method was based on the reciprocity theorem. The principle of this method was that, with vertical detection as a reference, the BRDF of a tilted observation could be obtained by comparing tilted observation and vertical observation at the same illumination. This improved method could reduce the dependence of the measurement uncertainty on the angular accuracy of the goniometer system.
The reciprocity theorem describes the reversibility of an optical path. It refers to the concept that the energy emitted by a light beam after arbitrary reflection or refraction on a surface or in a passive medium is equal to the energy emitted by the beam along the opposite path. When applied to the BRDF, BRDF remained unchanged when the incident angle and reflection angle were interchanged:
Compared with tilted illumination (
), the influence of
on Equation (12) was the least when vertically illuminated (
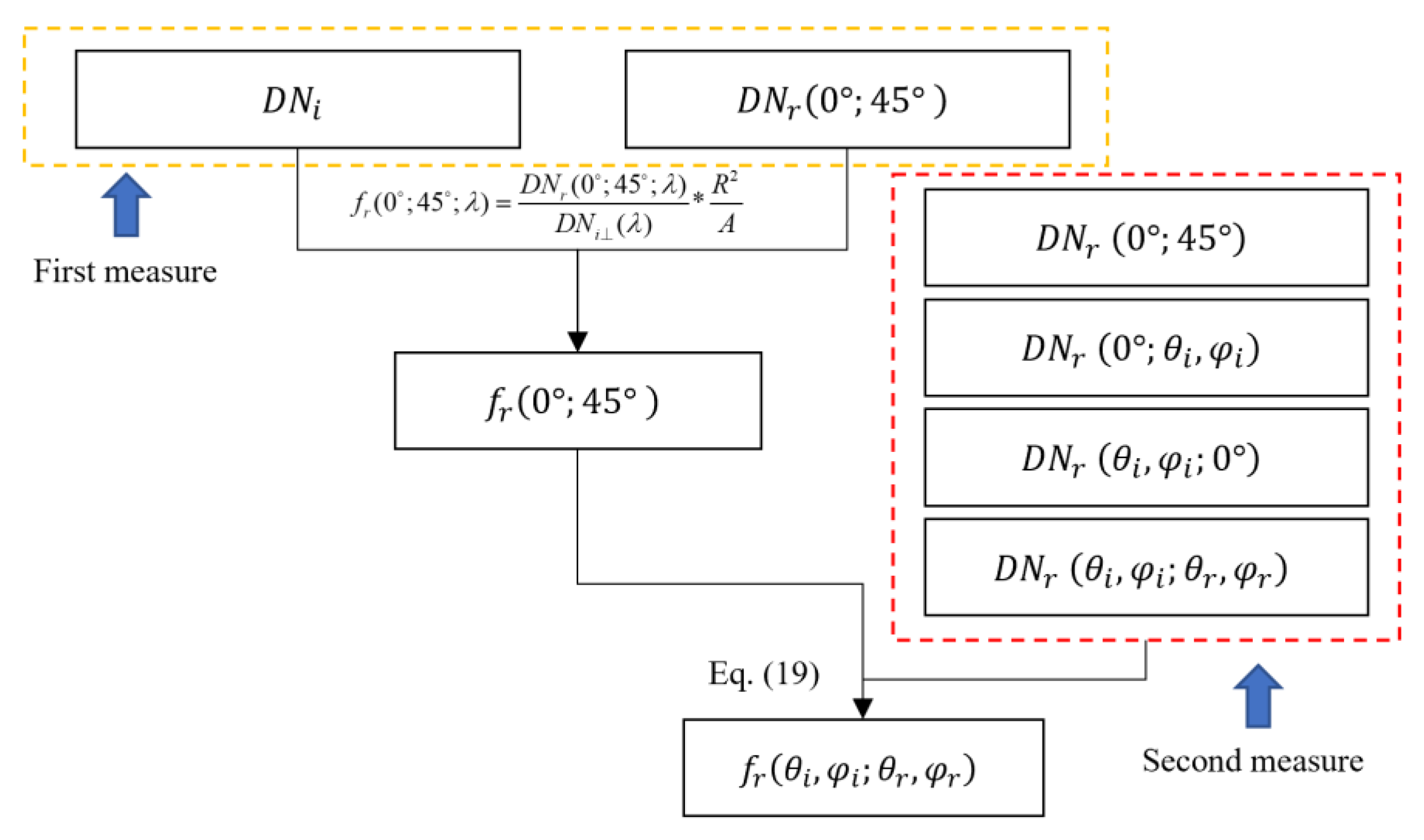
). Therefore, the BRDF measured at 0°/45° was used as a reference to obtain the BRDF for other angles at the same irradiance. Then
where
represents the DN of the incident radiance.
For other nonvertical irradiance conditions,
The measurement process for the improved data processing method is shown in
Figure 16.
7. Conclusions
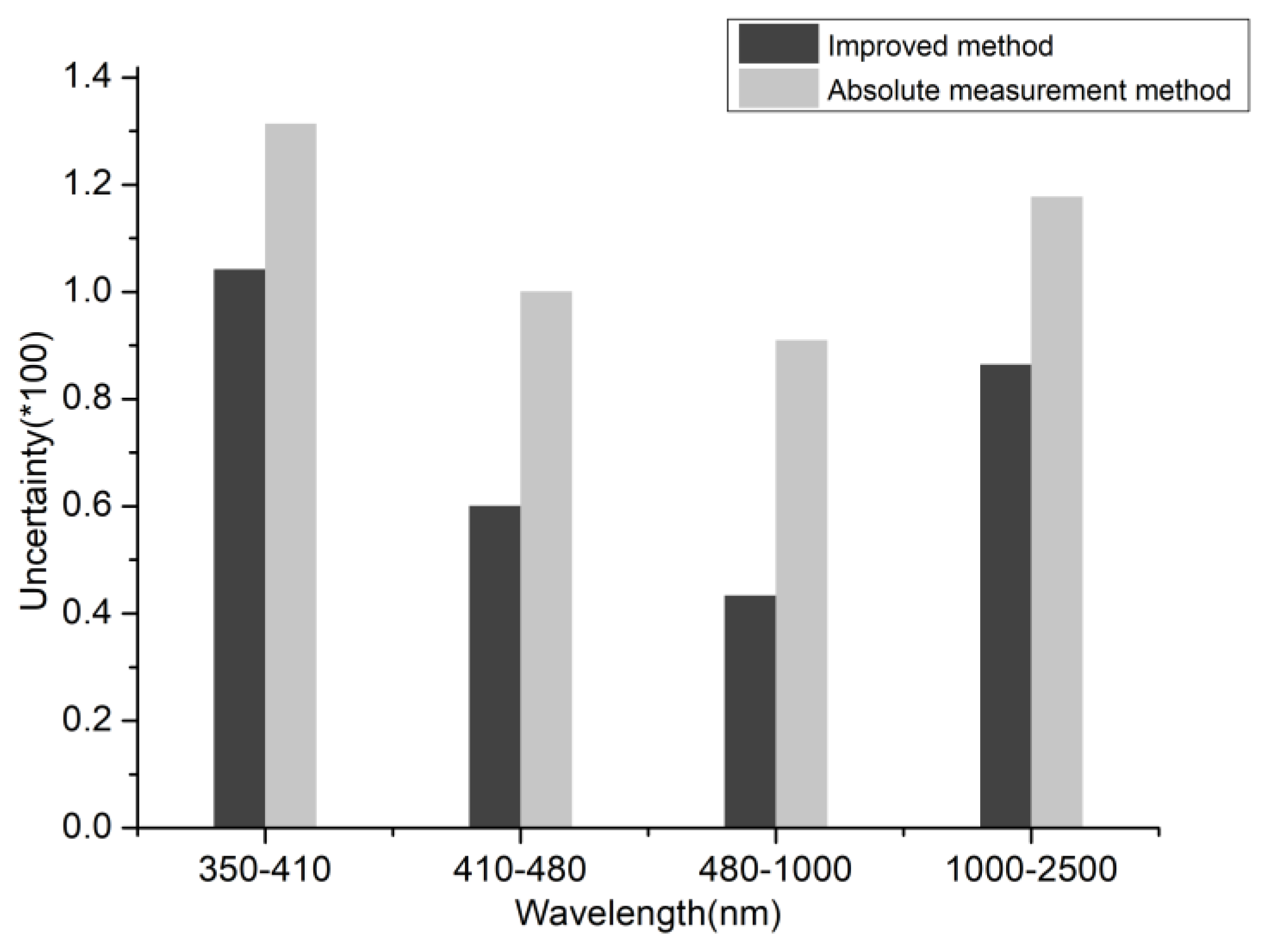
Measurement of the SD BRDF at in- and out-of-plane and large angle geometries for on-board calibration is inevitable under the restrictions of the satellite orbit, the on-board calibration time, and other factors. An improved data processing method based on the reciprocity theorem to realize the SD BRDF at in- and out-of-plane and large angle geometries for on-board calibration in the solar reflective band was suggested. The results show that the measurement uncertainty (k = 2) was better than 1.04% at 350 nm to 410 nm, 0.60% at 410 nm to 480 nm, 0.43% at 480 nm to 1000 nm, and 0.86% at 1000 nm to 2400 nm.
Compared with the absolute measurement method, at 410 nm to 1000 nm, the measurement accuracy of the improved method was significantly improved, and the measurement uncertainty was reduced by ½. In the ultraviolet and near-infrared bands, improvement was limited because the improved method transferred the dependence of the uncertainty of the absolute measurement method on the angle to a dependence on the radiation detection accuracy. Similarly, this was the reason for the high uncertainty of measurement in the ultraviolet and near-infrared bands. Different lamps could be used to improve the incident radiation. We aim to explore this to improve the measurement accuracy of the reflected radiation in future work.
The literature [
19] suggests that the effect of polarization on the measurement results may be negligible if the radiation source is an unpolarized source. However, some devices in the detection system, such as the grating monochromator, could be polarization-sensitive in the near infrared band, which may affect the measurement results. It is hoped that further research will be carried out in this area.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}