
A Two-Stage Track-before-Detect Method for Non-Cooperative Bistatic Radar Based on Deep Learning


Abstract

1. Introduction
2. Methods
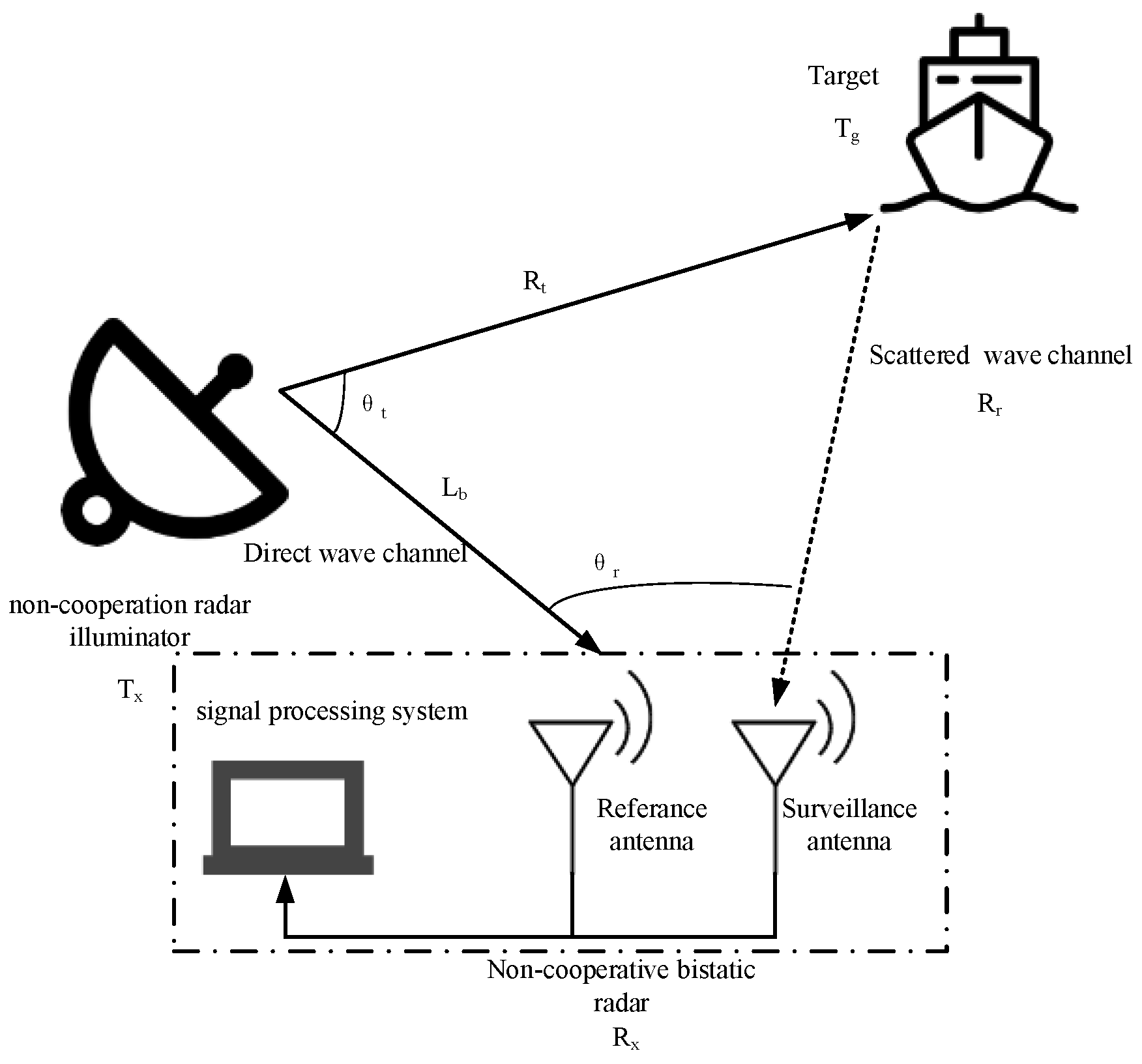
2.1. System Working Principle
2.2. Detection Performance Analysis
2.3. Model Method to Determine the Potential Track
- Speed-based constraints. Let be the position observation values obtained from consecutive scans, where corresponds to the center position of the detection box obtained by the target detection network. Now, consider two observations and from different frames, with the corresponding times and , where . Since the speeds of the ships in the experimental sea area are mostly 6~18 knots, the minimum speed is set as , and the maximum speed is set as , with the following specific constraints (4):
- Acceleration-based constraints. If the maximum acceleration is set to , then the distance between two adjacent observations at three different time points can be expressed as , with specific constraints as Equation (5):
- Angle-based constraints. The yaw angle refers to the alteration in the heading angle of a moving target from its pre-frame to post-frame position [26]. The heading transformation of the motion track lies within a certain range during the actual process of target motion. The specific limitations are as Equation (6):
- The first frame of the plot is used to establish a temporary track, and then the initial correlation gate is established according to Equation (4). That is, if the observation value of the first frame has points and the observation value of the second frame has points, then the observation value of this scan will form a correlation matrix , where the dimensions of the initial correlation matrix are . The observations in the correlation matrix that meet the speed constraints will be recorded.
- Tracks that satisfy velocity constraints undergo further checks for acceleration and angle constraints. If both conditions are met, the track is deemed transient. The relevant acceleration and angle information is then updated in preparation for the next match.
- If the subsequent gate has no observed value, the possible track is revoked. The above steps are repeated until a stable track is formed.
- All the potential tracks are traversed after initiation. If there are two points at the same position in the potential track, they can only be assigned to the same track for tracking. If they are mistakenly assigned to different tracks, it is necessary to compare the length of the two tracks, retain a longer track, or stitch the two tracks together.
- Filter initialization. The state transition matrix and the process noise covariance matrix are calculated by the given parameters: the target acceleration variance , the maximum acceleration probability , the minimum acceleration probability , the maximum acceleration , and the maneuvering frequency [29]. When the maneuvering acceleration is approximately uniformly distributed in , the variance can be obtained by Equation (7):
- Data association. The Singer model is used to predict, and then the threshold is used to compare the predicted value with the actual observed value. The points within the threshold are selected, and the association probability is calculated.
- State update. Update the status of the chosen points whilst simultaneously updating the covariance matrix. The innovation score for the data association stage is calculated by Equation (8):where is the -th observed value in the -th frame, represents the corresponding predicted value, is also called innovation in the Kalman filter and represents the error vector of the -th observed value and its corresponding predicted value in the -th frame, and is the inverse operation of the innovation covariance matrix. The innovation score represents the difference between the current observation and the predicted value, as well as the influence of the observation noise. It is a quantitative index to evaluate the matching degree between the observation data and the predicted state. Some parameter settings used in the model method are shown in Table 2.
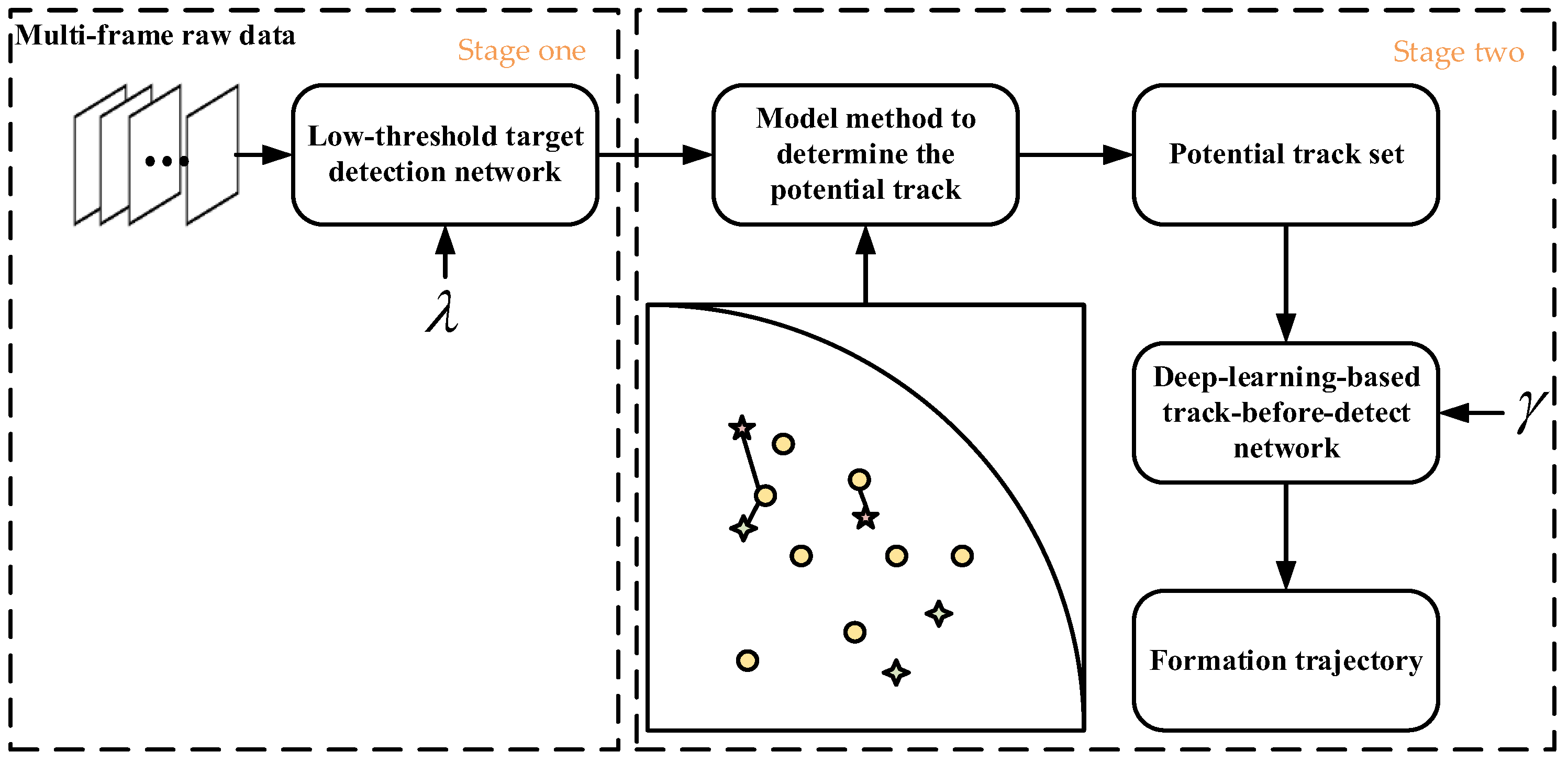
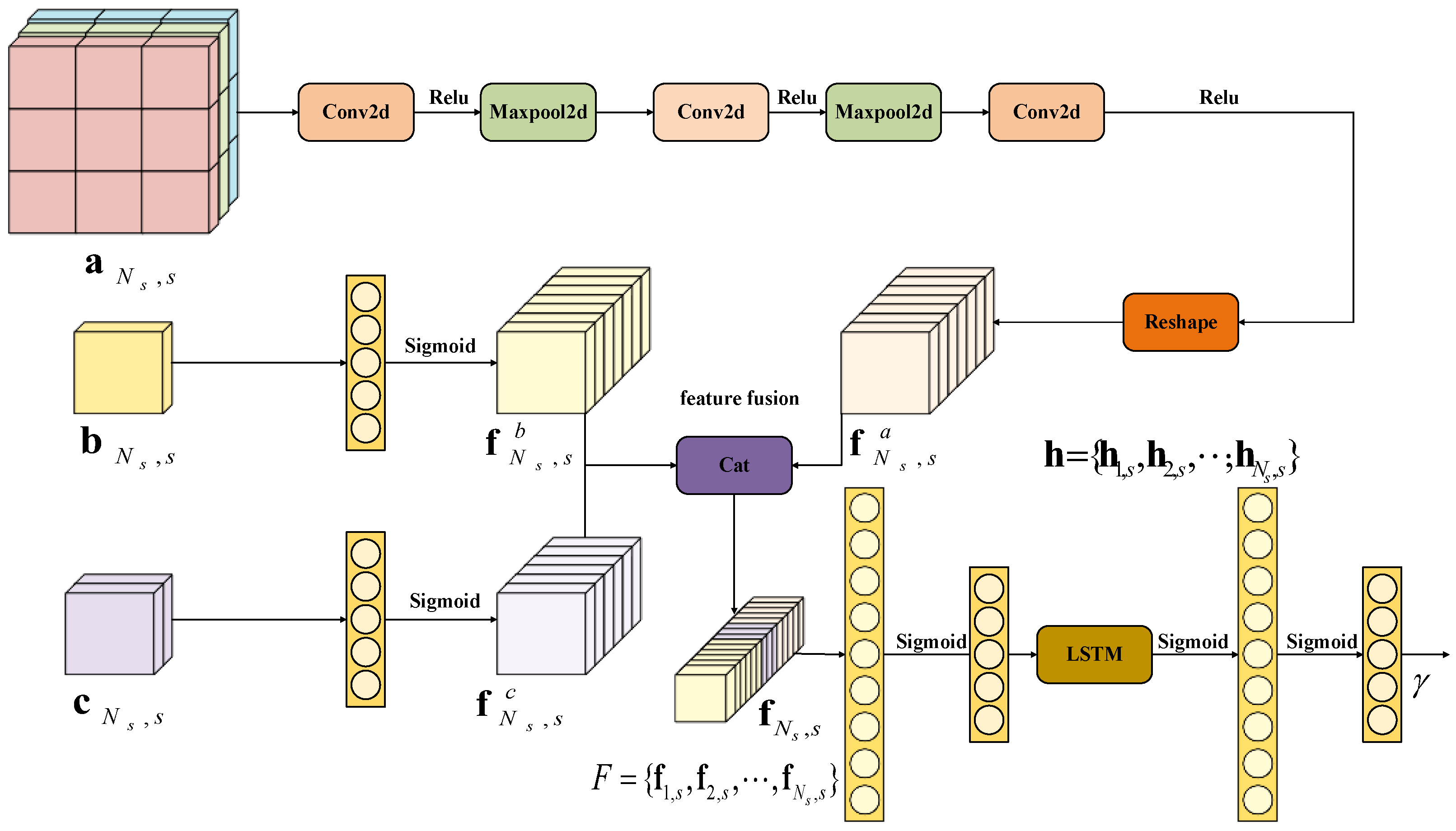
2.4. Two-Stage Track-before-Detect Method Based on Deep Learning
Deep-Learning-Based Track-before-Detect Network
3. Experiments and Analysis
3.1. The Effect of Processing Frame Number on Accuracy
3.2. Selection of Target Track Confidence Threshold
3.3. Real-Time Performance Analysis
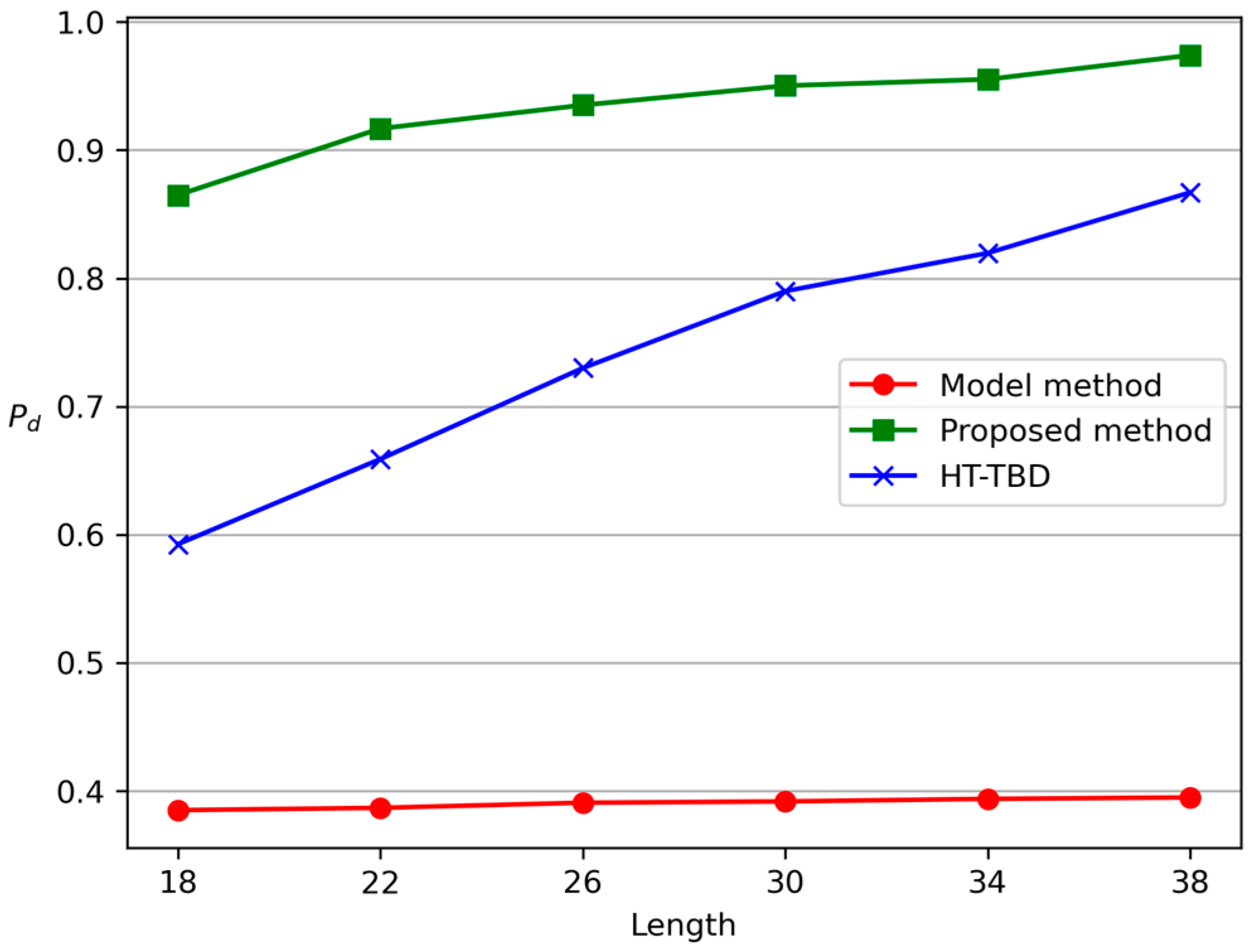
3.4. Detection Performance Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bao, Q.L.; Sen, W.; Pan, J.M.; Zhu, X. Analysis of key technologies of non-cooperative radar emitter target detection system. J. Radio Wave Sci. 2020, 35, 496–503. [Google Scholar] [CrossRef]
- Mao, E.K.; Zeng, T.; Hu, C.; Long, T. Bistatic detection system based on geosynchronous synthetic aperture radar: Concept and potential. Signal Process. 2013, 29, 285–292. [Google Scholar]
- Ge, X.J.; He, Y.; Song, J. Complex envelope estimation technology of direct wave pulse based on improved CMA + MMA. Mod. Radar 2010, 32, 54–59. [Google Scholar] [CrossRef]
- Xi, Z. Research on Key Technologies of Clutter Interference Suppression and Target Tracking for Non-Cooperative Bistatic Radar. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2020. [Google Scholar]
- Yi, W. Research on multi-target tracking algorithm based on track-before-detect technology. Ph.D. Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2012. [Google Scholar]
- Fu, L.Z.; Wang, B.; Cao, Y.; Yi, W. Multi-station anti-radiation radar target tracking algorithm based on PF-TBD. In Proceedings of the Tenth China Aviation Association Youth Science and Technology Forum Papers, Nanchang, China, 19–20 November 2022; pp. 406–411. [Google Scholar]
- Lehmann, F. Recursive Bayesian filtering for multitarget track-before-detect in passive radars. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2458–2480. [Google Scholar] [CrossRef]
- Santi, F.; Pastina, D.; Bucciarelli, M. Experimental demonstration of ship target detection in GNSS-based passive radar combining target motion compensation and track-before-detect strategies. Sensors 2020, 20, 599. [Google Scholar] [CrossRef]
- Knoedler, B.; Steffes, C.; Koch, W. Detecting and tracking a small UAV in GSM passive radar using track-before-detect. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Li, Y.; Ma, H.; Wu, Y.; Cheng, L. Track-Before-Detect Procedures in AM Radio-Based Passive Radar. Int. J. Antennas Propag. 2021, 2021, 3911956. [Google Scholar] [CrossRef]
- Testolin, A.; Diamant, R. Combining denoising autoencoders and dynamic programming for acoustic detection and tracking of underwater moving targets. Sensors 2020, 20, 2945. [Google Scholar] [CrossRef]
- Carr, C.; Dang, B.; Metcalf, J. RADGAN: Applying adversarial machine learning to track-before-detect radar. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–6. [Google Scholar]
- Wen, L.; Zhong, C.; Huang, X.; Ding, J. Sea clutter suppression based on selective reconstruction of features. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019; pp. 1–6. [Google Scholar]
- Wen, L.; Ding, J.; Xu, Z. Multiframe detection of sea-surface small target using deep convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5107116. [Google Scholar] [CrossRef]
- Zhu, C.; Deng, J.; Long, X.; Zhang, W.; Yi, W. DBU-Net Based Robust Target Detection for Multi-Frame Track-Before-Detect Method. In Proceedings of the 2022 11th International Conference on Control, Automation and Information Sciences (ICCAIS), Hanoi, Vietnam, 21–24 November 2022; pp. 412–418. [Google Scholar]
- Grossi, E.; Lops, M.; Venturino, L. A novel dynamic programming algorithm for track-before-detect in radar systems. IEEE Trans. Signal Process. 2013, 61, 2608–2619. [Google Scholar] [CrossRef]
- Song, J.; Xiong, W.; Chen, X.; Lu, Y. Experimental study of maritime moving target detection using hitchhiking bistatic radar. Remote Sens. 2022, 14, 3611. [Google Scholar] [CrossRef]
- Pan, M.; Chen, J.; Wang, S.; Dong, Z. A novel approach for marine small target detection based on deep learning. In Proceedings of the 2019 IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 19–21 July 2019; pp. 395–399. [Google Scholar]
- Shao, Y.E. Multi-Static Passive Radar Target Location and Tracking Based on Navigation Satellite. Master’s Thesis, Xi’an University of Electronic Science and Technology, Xi’an, China, 2022. [Google Scholar]
- Chen, X. Research on Improved Radar Multi-Target Track Initiation Algorithm. Master’s Thesis, Dalian Maritime University, Dalian, China, 2021. [Google Scholar]
- Mayor, M.A.; Carroll, R.L. A multi-target track initiation algorithm. In Proceedings of the 1987 American Control Conference, Minneapolis, MN, USA, 10–12 June 1987; pp. 1128–1130. [Google Scholar]
- Trunk, G.; Wilson, J. Track initiation of occasionally unresolved radar targets. IEEE Trans. Aerosp. Electron. Syst. 1981, AES-17, 122–130. [Google Scholar] [CrossRef]
- Zhao, C.C.; Wang, J.; Shao, L. Basic algorithm for trajectory initiation of ballistic target based on grid clustering. Fire Control. Command. Control. 2018, 43, 37–41+46. [Google Scholar]
- Smith, M. Feature space transform for multitarget detection. In Proceedings of the 1980 19th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, Albuquerque, NM, USA, 10–12 December 1980; pp. 835–836. [Google Scholar]
- Li, J.Q.; Zhao, R.H.; Xu, J.L.; Zhao, C.Y.; Ge, J.X. Trajectory initiation based on ant colony similarity weighted Hough transform. J. Sens. Technol. 2016, 29, 552–558. [Google Scholar]
- Shen, G.M.; Xiong, X.; Fan, Y.Q. Trajectory Initiation Method Based on Spatio-Temporal Characteristics of Radar Measurements. J. Terahertz Sci. Electron. Inf. 2022, 20, 1269–1276. [Google Scholar]
- He, Y.; Xiu, J.J.; Zhang, J.W. Radar Data Processing and Application, 2nd ed.; Electronic Industry Press: Beijing, China, 2009; pp. 91–93. [Google Scholar]
- Tan, S.C.; Wang, G.H.; Wang, N. IMM-Singer Model Based Tracking Algorithm for Maneuvering Targets. Fire Control. Command. Control. 2012, 37, 32–34. [Google Scholar]
- Singer, R.A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1970, AES-6, 473–483. [Google Scholar] [CrossRef]
- Wang, J.; Yi, W.; Kong, L. Improved DP-TBD methods based on multiple hypothesis testing for target early detection. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 1406–1413. [Google Scholar]
- Raghu, M.; Poole, B.; Kleinberg, J.; Ganguli, S.; Sohl-Dickstein, J. On the expressive power of deep neural networks. In Proceedings of the International Conference on Machine Learning, Sydney, NSW, Australia, 6–11 August 2017; pp. 2847–2854. [Google Scholar]
- Fan, W.T.; Li, Z.Y.; Zhang, T.; Luo, X.Y. Analysis of JPEG steganography based on deep extraction of steganographic noise. J. Xidian Univ. 2022, 50, 1–13. [Google Scholar]
- Hornik, K. Approximation capabilities of multilayer feedforward networks. Neural Netw. 1991, 4, 251–257. [Google Scholar] [CrossRef]
- Riedmiller, M. Advanced supervised learning in multi-layer perceptrons—From backpropagation to adaptive learning algorithms. Comput. Stand. Interfaces 1994, 16, 265–278. [Google Scholar] [CrossRef]
- Zhang, W.; Tanida, J.; Itoh, K.; Ichioka, Y. Shift-invariant pattern recognition neural network and its optical architecture. In Proceedings of the Annual Conference of the Japan Society of Applied Physics, Canada, 1988; pp. 2147–2151. [Google Scholar]
- Mikolov, T.; Kombrink, S.; Burget, L.; Černocký, J.; Khudanpur, S. Extensions of recurrent neural network language model. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 5528–5531. [Google Scholar]
- Luo, Z. Research on track-before-detect and fusion technology of weak target. Ph.D. Thesis, Xi’an University of Electronic Science and Technology, Xi’an, China, 2019. [Google Scholar]
- Wang, J.H.; Yi, W.; Kong, L.J. Research on multi-frame track- before-detect algorithm for netted radar. J. Radars 2019, 8, 490–500. [Google Scholar]
- Terrell, G.R.; Scott, D.W. Variable kernel density estimation. Ann. Stat. 1992, 20, 1236–1265. [Google Scholar] [CrossRef]
- Carlson, B.; Evans, E.; Wilson, S. Search radar detection and track with the Hough transform. I. system concept. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 102–108. [Google Scholar] [CrossRef]
- Ding, L.F. Radar Principles, 3rd ed.; National Defense Industry Press: Beijing, China, 2009. [Google Scholar]
- Bo, J.T.; Wang, G.H.; Yu, H.B.; Peng, Z.G. Track-before-detect algorithm based on parallel-line-coordinate transformation. Acta Aeronaut. Astronaut. Sin. 2022, 43, 570–583. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sign | Unit | Value |
|---|---|---|---|
| Radiation source transmission power | kw | 25 | |
| Target RCS | m2 | 10 | |
| Receiver gain | dB | 33 | |
| Frequency | MHz | 1260 | |
| Bandwidth | MHz | 3 | |
| System loss | dB | 5 |
| Parameter | Sign | Unit | Value |
|---|---|---|---|
| Minimum initial velocity | m/s | 3 | |
| Maximum initial velocity | m/s | 10 | |
| Maximum initial acceleration | m/s2 | 1 | |
| Maximum initial heading angle | ° | 80 | |
| Singer model maximum acceleration probability | % | 5 | |
| Singer model minimum acceleration probability | % | 5 | |
| Singer model minimum acceleration | m/s2 | 0.5 | |
| Singer model maneuver frequency | s | 8 | |
| Tracking gate probability | % | 99.97 |
| Number of Echo Groups | Number of Echo Frames per Group | Number of True Trajectories | Number of False Trajectories | Train/Test |
|---|---|---|---|---|
| 200 | 40 | 1384 | 2645 | 8:2 |
| Epoch | Batch Size | Learning Rate | Loss Function | Optimizer |
|---|---|---|---|---|
| 500 | 8 | 3 × 10−4 | BCELoss | Adam |
| Number of False Alarms per Frame | Proposed Method | HT-TBD | |
|---|---|---|---|
| Model Method | Detection Network | ||
| 25 | 0.322429 s | 0.031219 s | 1.944900 s |
| 40 | 0.394649 s | 0.037998 s | 3.043783 s |
| 55 | 0.557488 s | 0.041999 s | 4.188548 s |
| 70 | 1.018157 s | 0.043999 s | 6.083090 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, W.; Lu, Y.; Song, J.; Chen, X. A Two-Stage Track-before-Detect Method for Non-Cooperative Bistatic Radar Based on Deep Learning. Remote Sens. 2023, 15, 3757. https://doi.org/10.3390/rs15153757
Xiong W, Lu Y, Song J, Chen X. A Two-Stage Track-before-Detect Method for Non-Cooperative Bistatic Radar Based on Deep Learning. Remote Sensing. 2023; 15(15):3757. https://doi.org/10.3390/rs15153757
Chicago/Turabian StyleXiong, Wei, Yuan Lu, Jie Song, and Xiaolong Chen. 2023. "A Two-Stage Track-before-Detect Method for Non-Cooperative Bistatic Radar Based on Deep Learning" Remote Sensing 15, no. 15: 3757. https://doi.org/10.3390/rs15153757
APA StyleXiong, W., Lu, Y., Song, J., & Chen, X. (2023). A Two-Stage Track-before-Detect Method for Non-Cooperative Bistatic Radar Based on Deep Learning. Remote Sensing, 15(15), 3757. https://doi.org/10.3390/rs15153757