

Chaotic Coding for Interference Suppression of Digital Ionosonde

Abstract
:1. Introduction
2. Chaotic Coding
2.1. Bernoulli Map
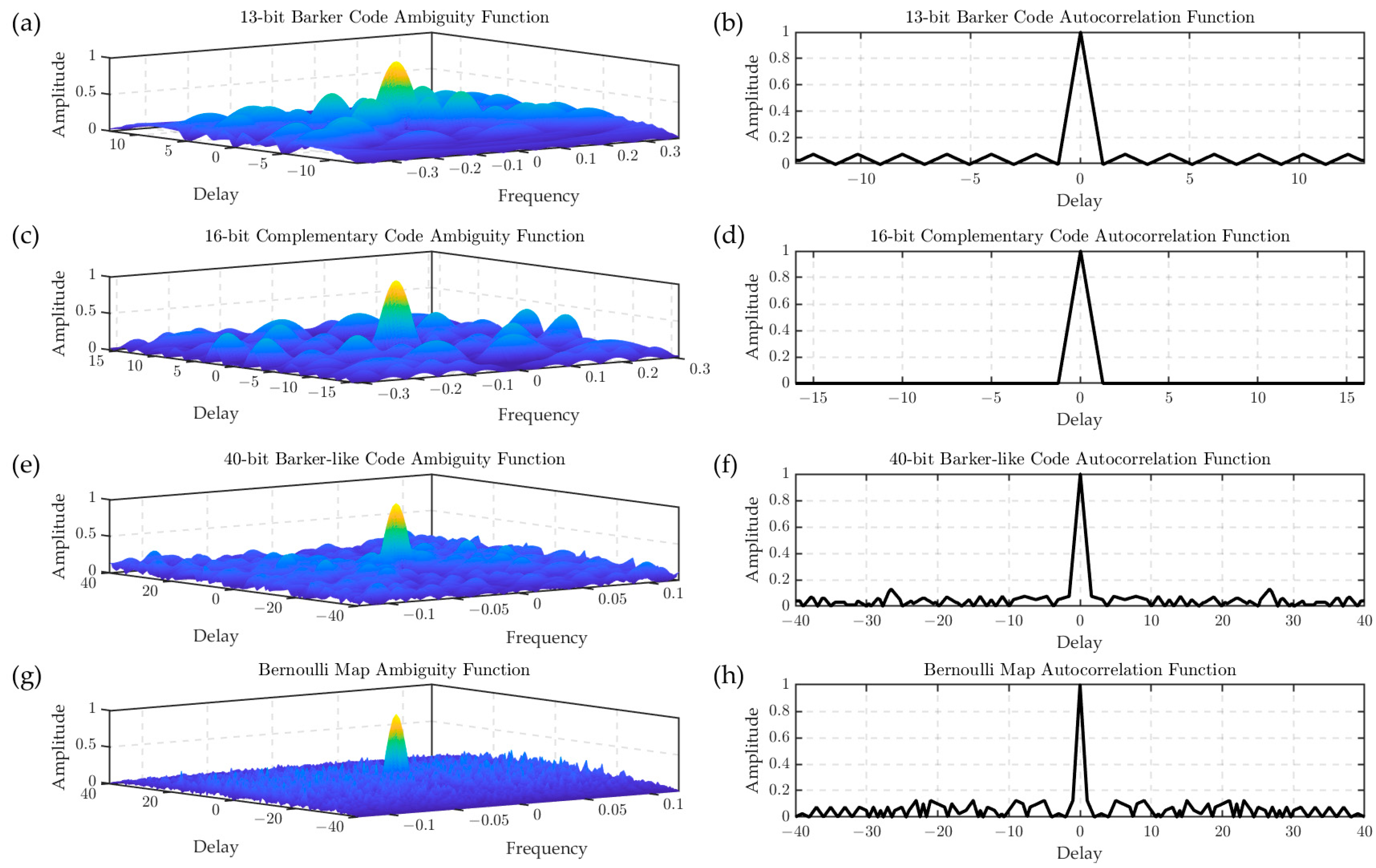
2.2. Ambiguity Function of Different Codes
- The main lobe width of ambiguity functions is related to the resolution of the encoding sequences. The narrower the main lobe, the higher the radar signal resolution.
- The pulse compression ratio is proportional to the sequence length, and a longer sequence provides a narrower main lobe, which results in a higher resolution in consistent pulse duration, along with a higher SNR [24].
- Theoretically, complementary code should present much better performance if the pair of codes are transmitted and processed simultaneously. In addition, its sidelobe is also affected by Doppler shift.
- Bernoulli map code is a set of stochastic independent sequences; hence, the sidelobes are reduced to a relatively ideal state, but it needs more storage units.
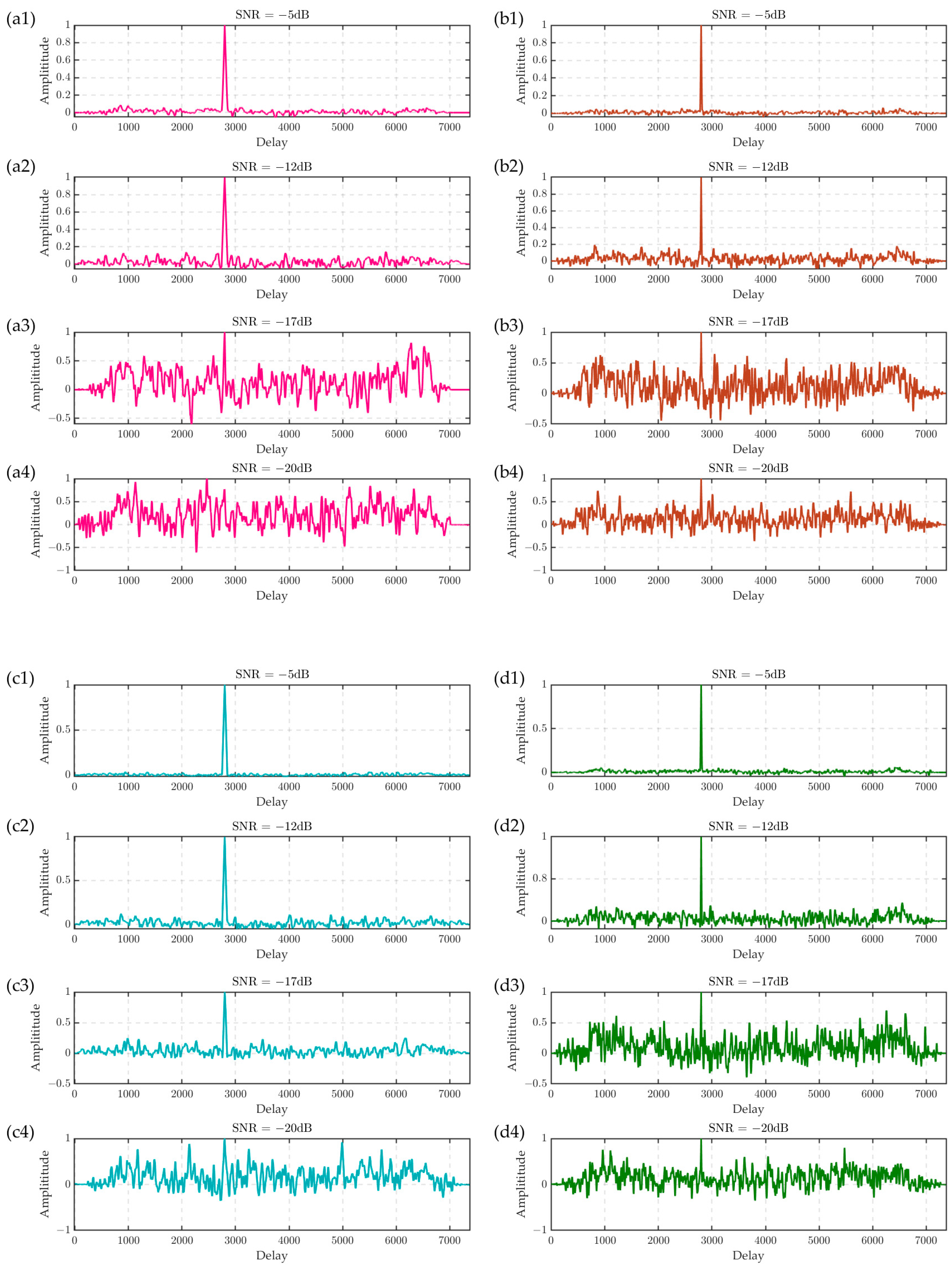
2.3. SNR Analysis by Simulation
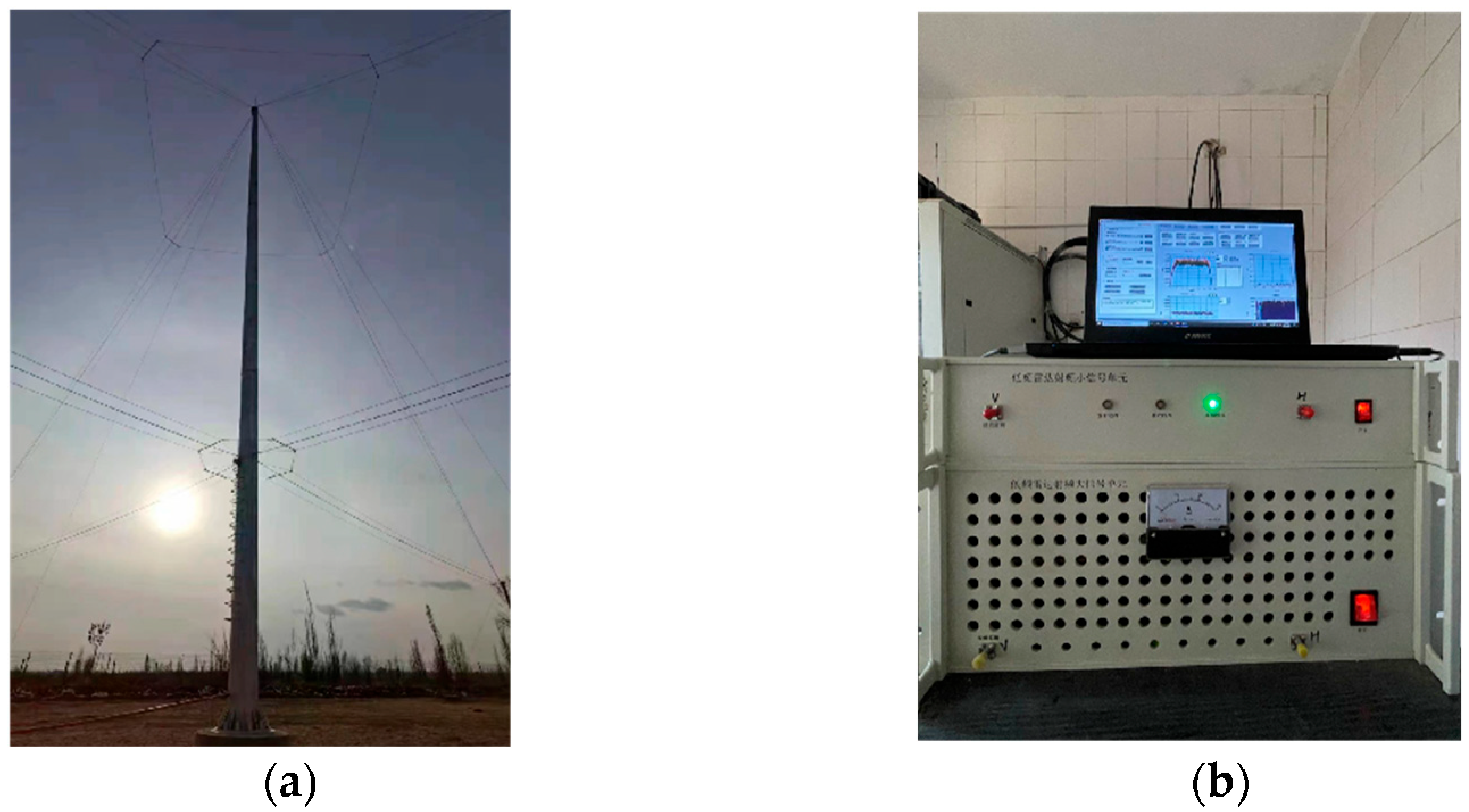
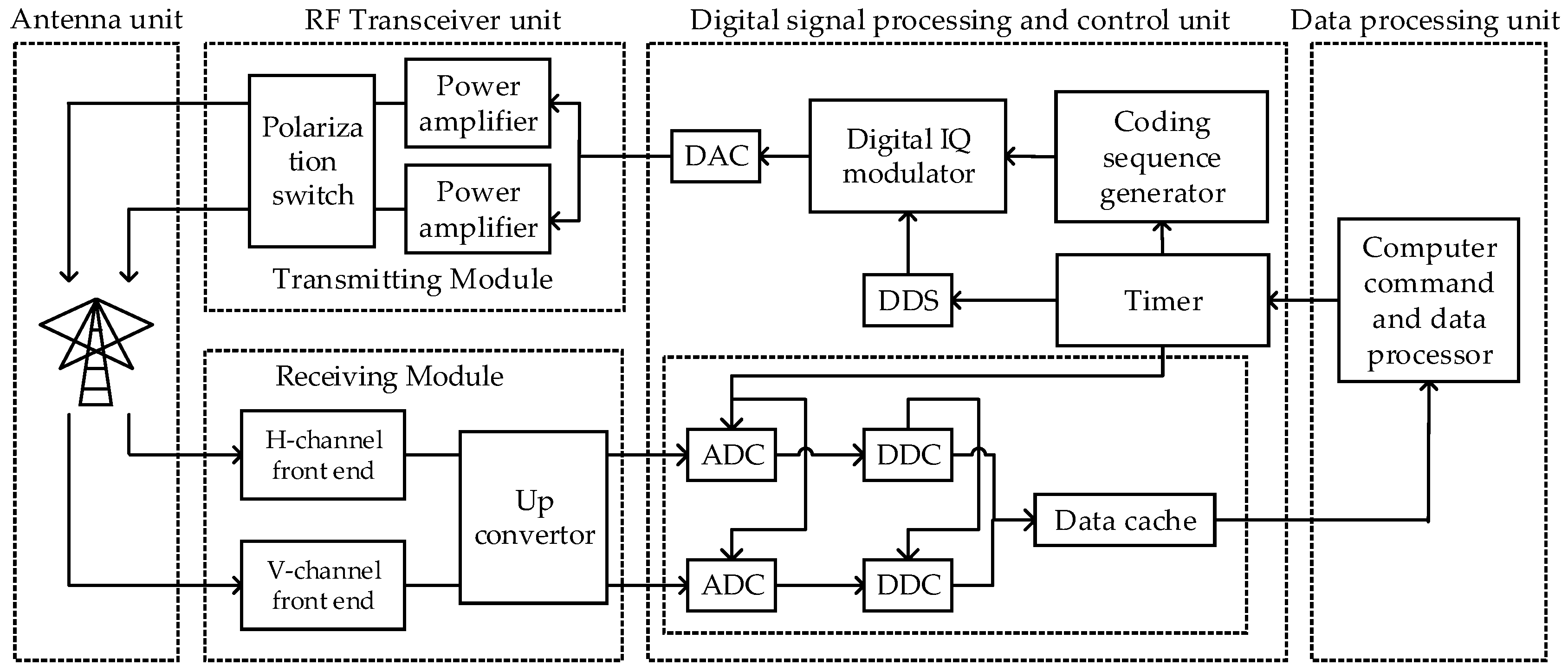
3. System Description
3.1. Configuration
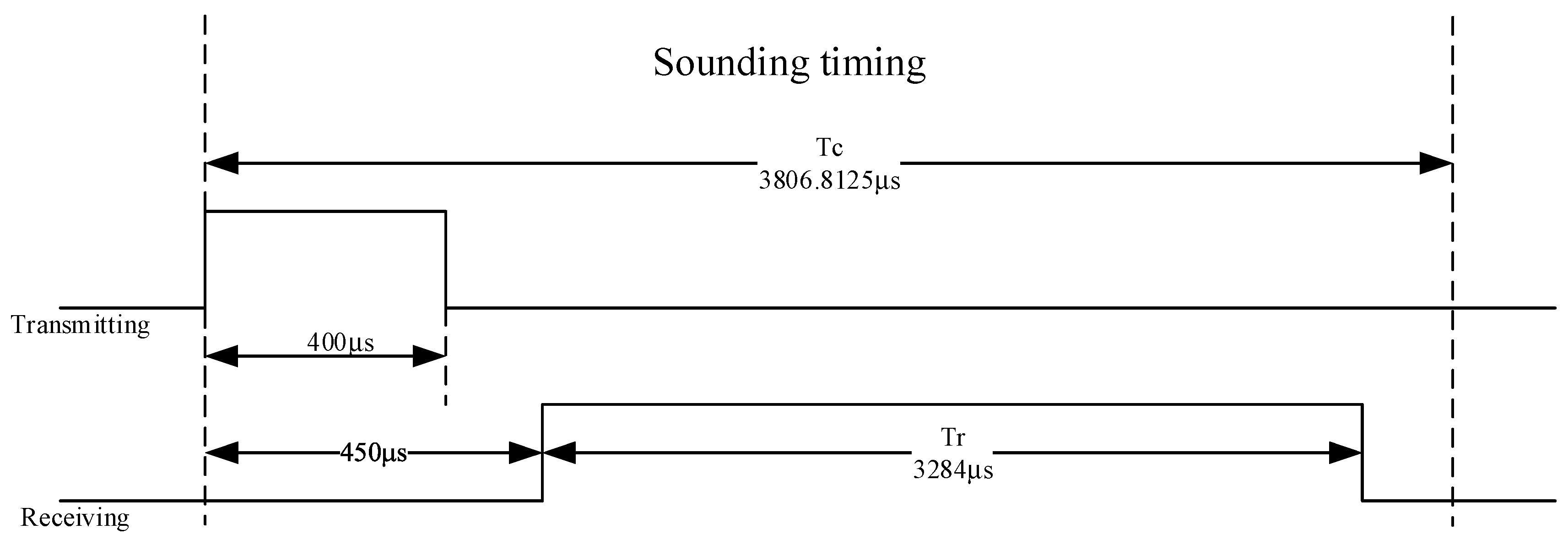
3.2. Sounding Timing
4. Experiment for interference suppression
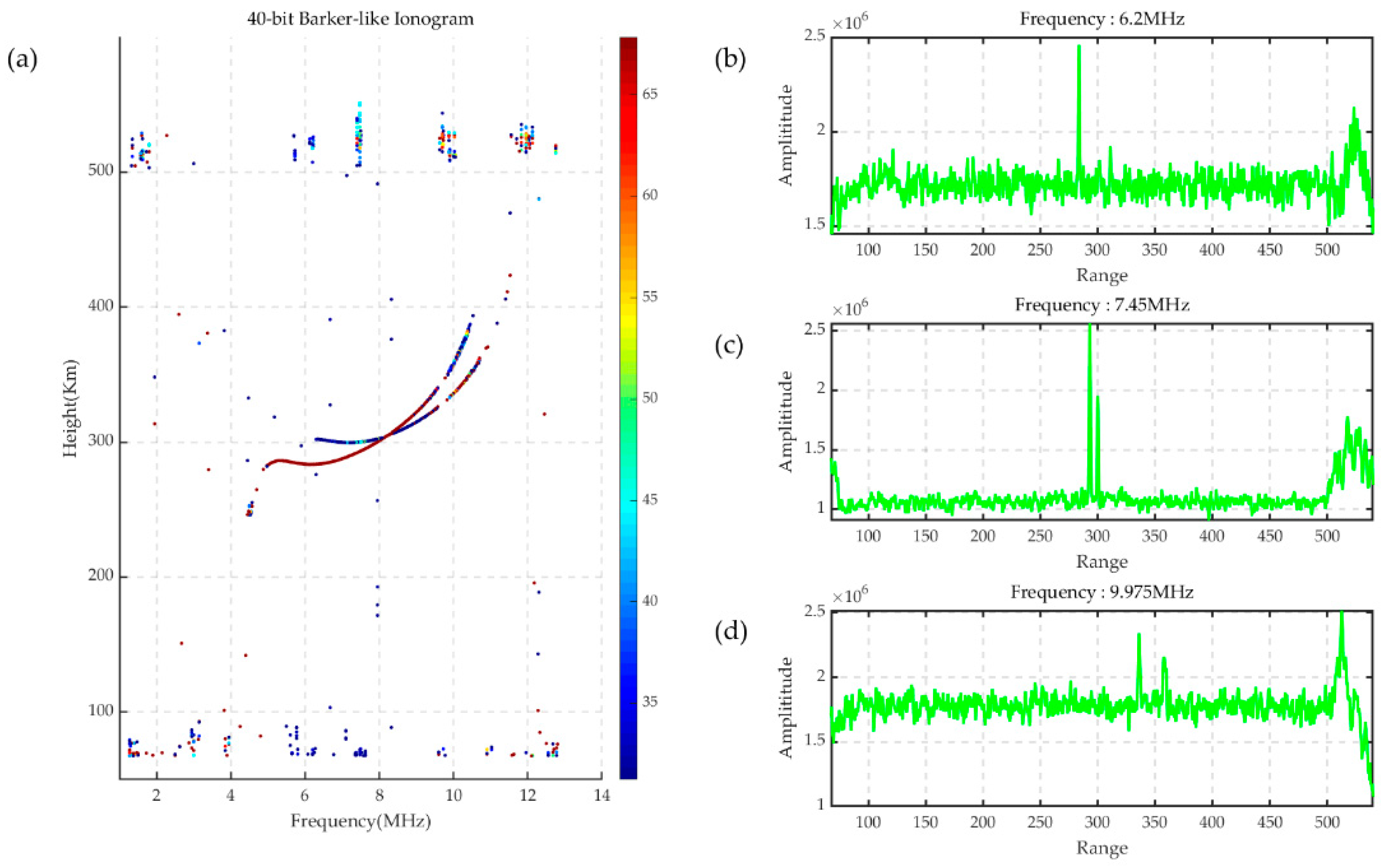
4.1. Influence of Interference on the ACF of Barker-Like Coding
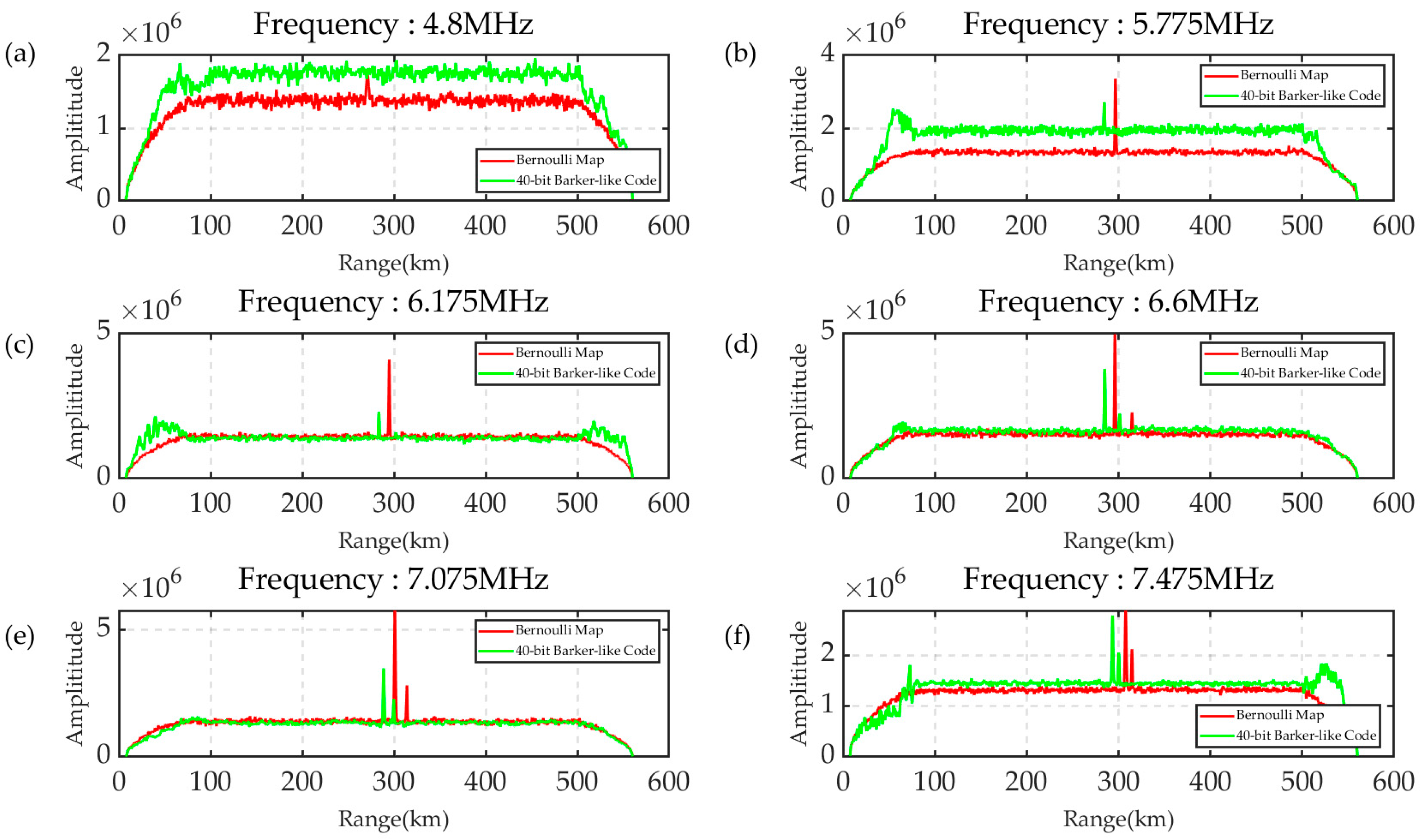
4.2. Interference Suppression by Bernoulli Coding
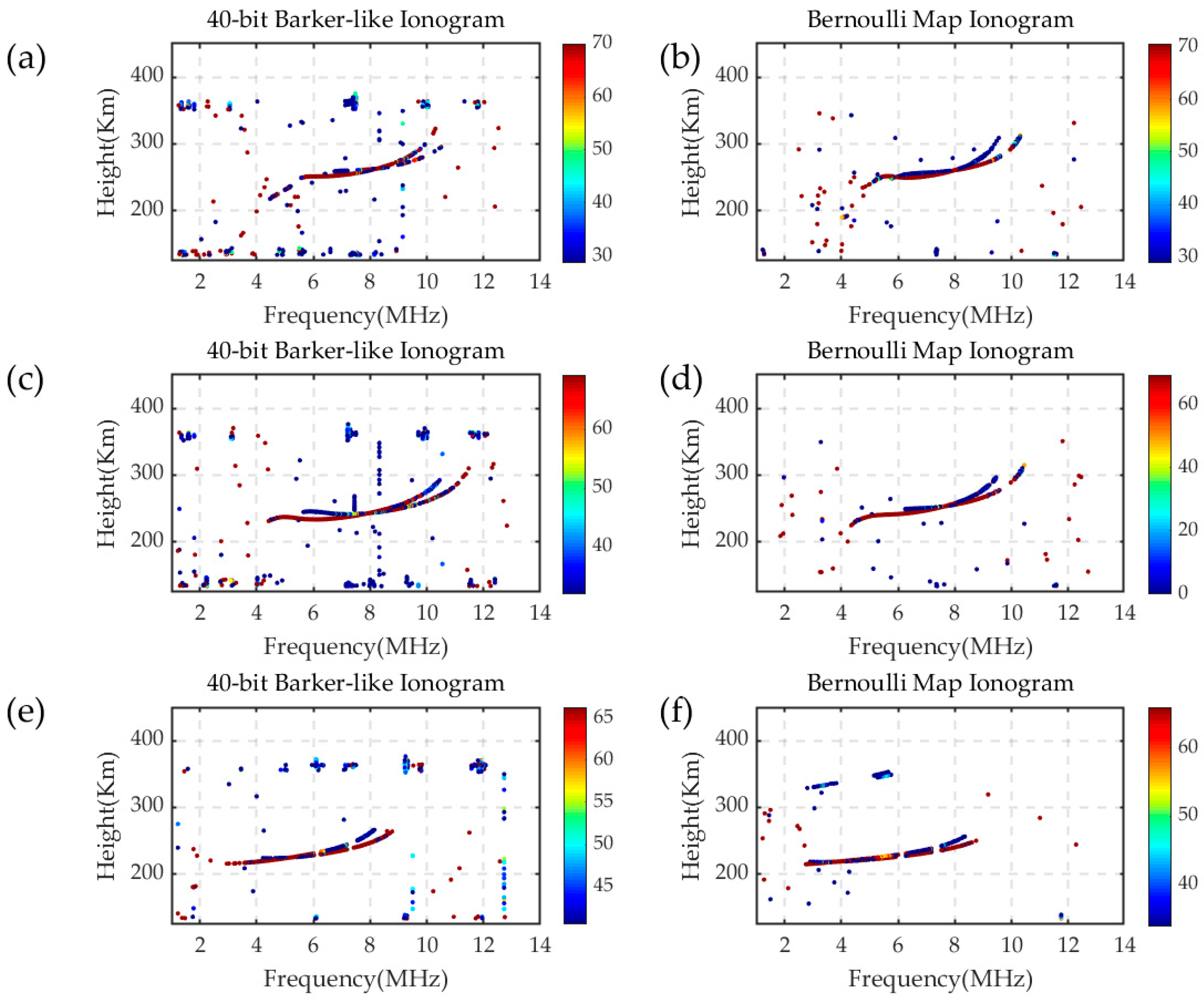
4.3. Effect on Ionograms
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mengya, J. Antenna Design and Digital Control System Development of a High Performance Ionosonde; University of Chinese Academy of Sciences: Beijing, China, 2020. [Google Scholar]
- Mengya, J.; Wei, G.; Peng, L.; Caiyun, W. Design of Digital Control System for High-Performance Ionosonde Based on FPGA. Chin. J. Space Sci. 2021, 41, 580–588. [Google Scholar] [CrossRef]
- Gangquan, Z. Ionospheric Radar Echo Data Processing in Yinchuan Area; University of Chinese Academy of Sciences: Beijing, China, 2022. [Google Scholar]
- Kun, C. Design of the Ionosonde; South-Central Minzu University: Wuhan, China, 2009. [Google Scholar]
- Ghebrebrhan, O.; Luce, H.; Yamamoto, M.; Fukao, S. Interference Suppression Factor Characteristics of Complementary Codes for ST/MST Radar Applications. Radio Sci. 2004, 39, RS3013. [Google Scholar] [CrossRef]
- Tsmots, I.; Riznyk, O.; Rabyk, V.; Kynash, Y.; Kustra, N.; Logoida, M. Implementation of FPGA-Based Barker’s-Like Codes. In Lecture Notes in Computational Intelligence and Decision Making; Springer: Cham, Switzerland, 2020; pp. 203–214. [Google Scholar]
- Zhishen, S.; Xiaojun, L.; Bo, Z. Application of Complementary Codes in Ionosphere Sounding. Sci. Technol. Eng. 2011, 11, 5047–5052. [Google Scholar]
- Liu, T.; Yang, G.; Hu, Y.; Jiang, C.; Lan, T.; Zhao, Z.; Ni, B. A Novel Ionospheric Sounding Network Based on Complete Complementary Code and Its Application. Sensors 2019, 19, 779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bostan, S.M.; Urbina, J.V.; Mathews, J.D.; Bilén, S.G.; Breakall, J.K. An HF Software-Defined Radar to Study the Ionosphere. Radio Sci. 2019, 54, 839–849. [Google Scholar] [CrossRef]
- Semeter, J.; Butler, T.; Heinselman, C.; Nicolls, M.; Kelly, J.; Hampton, D. Volumetric Imaging of the Auroral Ionosphere: Initial Results from PFISR. J. Atmos. Sol. Terr. Phys. 2009, 71, 738–743. [Google Scholar] [CrossRef]
- Chen, G.; Jin, H.; Yan, J.-Y.; Cui, X.; Zhang, S.-D.; Yan, C.-X.; Yang, G.-T.; Lan, A.-L.; Gong, W.-L.; Qiao, L.; et al. Hainan Coherent Scatter Phased Array Radar (HCOPAR): System Design and Ionospheric Irregularity Observations. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4757–4765. [Google Scholar] [CrossRef]
- Li, J.; Liu, M.; Ou, J.; Wang, W. A Novel Radar Waveform Design for Suppressing Autocorrelation Side-Lobe Based on Chaotic and Single Fusion Encoding Method. Prog. Electromagn. Res. M 2022, 111, 77–88. [Google Scholar] [CrossRef]
- Yao, M.; Zhao, Z.; Chen, G.; Yang, G.; Su, F.; Li, S.; Zhang, X. Comparison of Radar Waveforms for a Low-Power Vertical-Incidence Ionosonde. IEEE Geosci. Remote Sens. Lett. 2010, 7, 636–640. [Google Scholar] [CrossRef]
- Huang, J.; MacDougall, J.W. Legendre Coding for Digital Ionosondes. Radio Sci. 2005, 40, RS4013. [Google Scholar] [CrossRef]
- Gang, C.; Zhengyu, Z.; Guoqiang, Z.; Shuzhu, S. The Wuhan Ionospheric Sounding Systems. IEEE Geosci. Remote Sens. Lett. 2009, 6, 748–751. [Google Scholar] [CrossRef]
- Shi, S.; Yang, G.; Jiang, C.; Zhang, Y.; Zhao, Z. Wuhan Ionospheric Oblique Backscattering Sounding System and Its Applications—A Review. Sensors 2017, 17, 1430. [Google Scholar] [CrossRef] [Green Version]
- Evans, J.V. Ionospheric Movements Measured by Incoherent Scatter: A Review. J. Atmos. Terr. Phys. 1972, 34, 175–209. [Google Scholar] [CrossRef]
- Dong, S.; Wang, Y.; Xin, X.; Tong, X. A Chaos-Based True Random Number Generator Based on OTA Sharing and Non-Flipped Folded Bernoulli Mapping for High-Precision ADC Calibration. Microelectron. J. 2021, 116, 105259. [Google Scholar] [CrossRef]
- Yang, Q.; Zhang, Y.; Gu, X. A Signal Model Based on Combination Chaotic Map for Noise Radar. Prog. Electromagn. Res. M 2013, 28, 57–71. [Google Scholar] [CrossRef] [Green Version]
- Babu, S.B.S.; Kumar, R. 1D-Bernoulli Chaos Sequences Based Collaborative-CDMA: A Novel Secure High Capacity CDMA Scheme. Wirel. Pers. Commun. 2017, 96, 2077–2086. [Google Scholar] [CrossRef]
- Ameen, M.J.M.; Hreshee, S.S. Securing Physical Layer of 5G Wireless Network System over GFDM Using Linear Precoding Algorithm for Massive MIMO and Hyperchaotic QR-Decomposition. Int. J. Intell. Eng. Syst. 2022, 15, 579–591. [Google Scholar] [CrossRef]
- da Costa, R.A.; Loiola, M.B.; Eisencraft, M. Spectral Properties of Chaotic Signals Generated by the Bernoulli Map. J. Eng. Sci. Technol. Rev. 2015, 8, 12–16. [Google Scholar] [CrossRef]
- Tsuneda, A. Orthogonal Chaotic Binary Sequences Based on Bernoulli Map and Walsh Functions. Entropy 2019, 21, 930. [Google Scholar] [CrossRef] [Green Version]
- Nadav, L.; Eli, M. Radar Signals; Wiley: Hoboken, NJ, USA, 2004; ISBN 0-471-47378-2. [Google Scholar]
- Golay, M.J.E. Complementary Series. IRE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Yang, G.; Duan, P.; Jiang, C.; Liu, T.; Lan, T.; Zhao, Z.; Shi, S.; Xu, C. Application of Biphase Complete Complementary Code for Ionospheric Sounding. Sensors 2018, 18, 2811. [Google Scholar] [CrossRef] [PubMed]
- Davies, K. Ionospheric Radio; P. Peregrinus on behalf of the Institution of Electrical Engineers: London, UK, 1989; ISBN 086341186X. [Google Scholar]
- Chen, H.; Yuan, K.; Yao, M.; Xiong, J. A Novel Composite Coding Method for Incoherent Scatter Radar. Atmosphere 2021, 12, 1518. [Google Scholar] [CrossRef]
- Foreman, T.L.; Wilson, S.G. Multiple Pulse Detection in Distributed Rayleigh Clutter. In Proceedings of the Record of the IEEE 2000 International Radar Conference [Cat. No. 00CH37037], Alexandria, VA, USA, 12–12 May 2000; pp. 637–642. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Code |
|---|---|
| −1,−1,−1,1,1,−1,−1,−1,1,1,1,−1,1,−1,−1,1,−1,1,−1,−1,−1,1,−1,−1,1,1,1,1,1,1,−1,1,−1,−1,1,1,1,1,−1,1 | |
| −1,−1,−1,−1,−1,−1,1,−1,−1,1,−1,1,1,−1,−1,−1,−1,1,1,1,−1,−1,−1,1,−1,1,−1,1,−1,1,−1,−1,1,1,1,−1,1,1,−1,−1 | |
| … | … |
| −1,1,−1,−1,1,−1,1,1,−1,1,1,1,−1,−1,−1,1,−1,−1,1,1,1,−1,1,−1,−1,−1,1,1,1,1,1,−1,1,1,1,1,1,−1,−1,1 |
| 13-Bit Barker Code | 16-Bit Complementary Code | 40-Bit Barker-Like Code | 40-Bit Bernoulli Map Code | |
|---|---|---|---|---|
| PSL (dB) | −22.28 | / | −22.50 | −46.02 |
| ISL (dB) | −0.70 | / | −1.94 | −25.50 |
| NS (dB) | 11.14 | 12.04 | 16 | 16 |
| Item | Specification |
|---|---|
| Antenna | A pair of orthogonal Δ |
| Transmitted peak power | 500 W |
| Coding sequence | 40-bit Bernoulli or Barker-like |
| Coding chip width | 10 μs |
| Operating frequency Frequency step | 1–30 MHz 25 kHz, 50 kHz, 100 kHz |
| Receiver bandwidth IF | 100 kHz 70 MHz |
| ADC sampling Coherent accumulation times | 40 MHz 100 |
| Detecting rang Range resolution | 67.5–560.1 km 1.5 km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Guo, W.; Liu, P.; Wang, T.; Wang, C.; Fang, Q.; Yang, J.; Li, L.; Liu, D.; Huang, J. Chaotic Coding for Interference Suppression of Digital Ionosonde. Remote Sens. 2023, 15, 3747. https://doi.org/10.3390/rs15153747
Han S, Guo W, Liu P, Wang T, Wang C, Fang Q, Yang J, Li L, Liu D, Huang J. Chaotic Coding for Interference Suppression of Digital Ionosonde. Remote Sensing. 2023; 15(15):3747. https://doi.org/10.3390/rs15153747
Chicago/Turabian StyleHan, Sijia, Wei Guo, Peng Liu, Te Wang, Caiyun Wang, Qingyu Fang, Jian Yang, Lingling Li, Dapeng Liu, and Jianping Huang. 2023. "Chaotic Coding for Interference Suppression of Digital Ionosonde" Remote Sensing 15, no. 15: 3747. https://doi.org/10.3390/rs15153747
APA StyleHan, S., Guo, W., Liu, P., Wang, T., Wang, C., Fang, Q., Yang, J., Li, L., Liu, D., & Huang, J. (2023). Chaotic Coding for Interference Suppression of Digital Ionosonde. Remote Sensing, 15(15), 3747. https://doi.org/10.3390/rs15153747