
A Novel Optimal Robust Adaptive Scheme for Accurate GNSS RTK/INS Tightly Coupled Integration in Urban Environments

Abstract

1. Introduction
2. Tightly Coupled RTK/INS Integration System
2.1. System Model
2.2. Measurement and Updating Model
3. Multi-Condition Decision Robust Adaptive Algorithm for Tightly Coupled RTK/INS
3.1. Dual-Factor Correlation Observation Robust Algorithm Considering Ambiguity Variance
3.2. Innovation-Based Adaptive Estimation
3.3. Multi-Condition Decision Model
3.3.1. NHC Decision Model
3.3.2. Abnormal Innovation Proportion Decision Model
3.3.3. Multi Condition Decision Strategy
| Algorithm 1: New robust adaptive scheme considering multi-condition strategies | |
| 1 | |
| 2 | Process {Initialization, System buffer} |
| 3 | while no abort command received do |
| 4 | |
| 5 | Process {State update} |
| 6 | if , end |
| 7 | if (), continue |
| 8 | else |
| 9 | |
| 10 | if () |
| 11 | |
| 12 | else |
| 13 | if () |
| 14 | |
| 15 | else |
| 16 | if |
| 17 | |
| 18 | else |
| 19 | |
| 20 | end if |
| 21 | end if |
| 22 | end if |
| 23 | end if |
| 24 | end while |
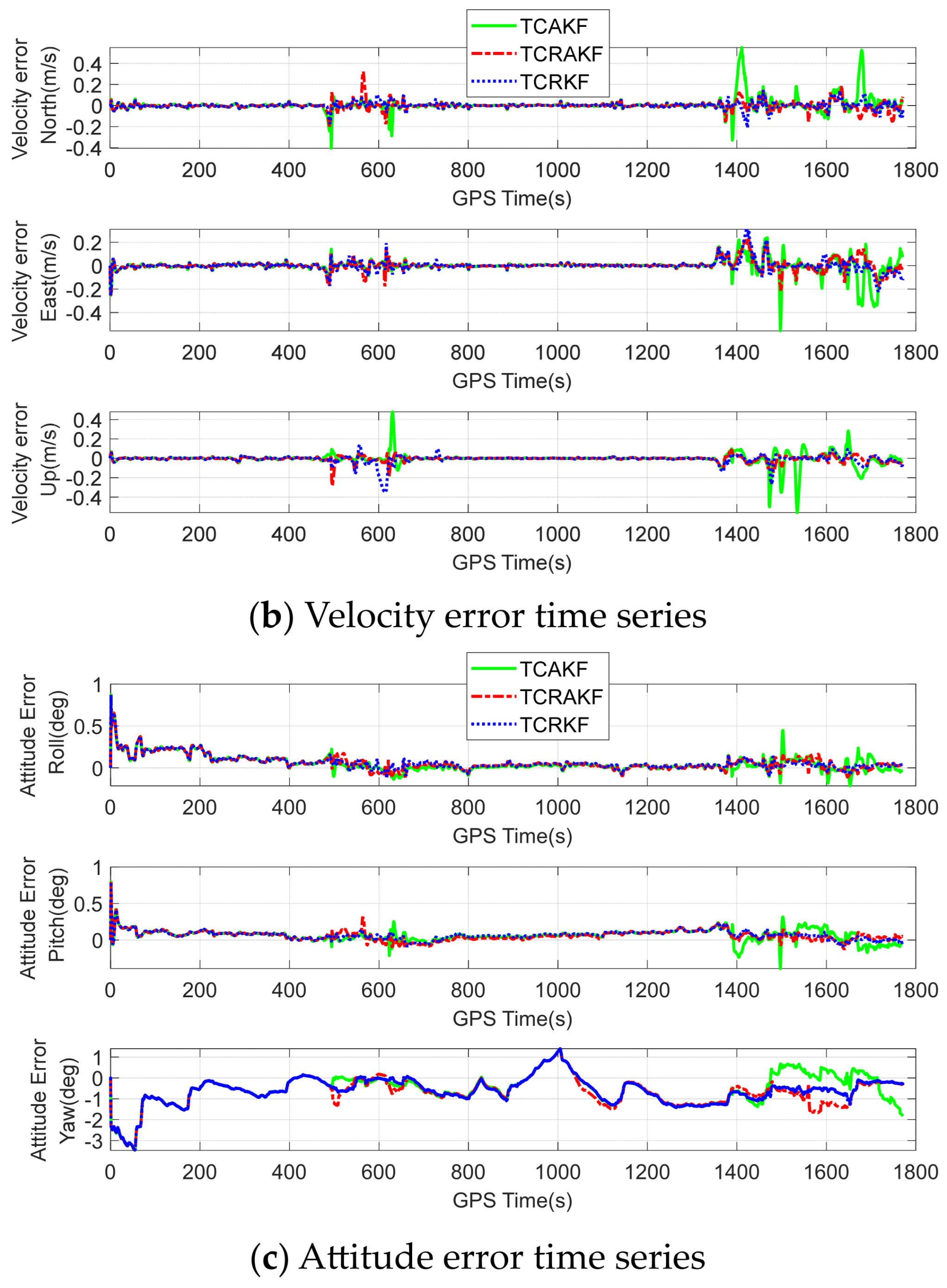
4. Test Cases and Results Analysis
- Test 1: Experiments in challenging and complex urban scenes of Tokyo
- Test 2: Performance verification of complex urban scenes in Wuhan
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, F.; Zhao, L.; Li, L.; Feng, S.; Cheng, J. Performance Evaluation of Kinematic BDS/GNSS Real-Time Precise Point Positioning for Maritime Positioning. J. Navig. 2019, 72, 34–52. [Google Scholar] [CrossRef]
- Yi, Q.W.; Yu, B.G.; Wang, B.B.; Sheng, C.Z. A Precise Point Timing Method Based on BDS-3 B2b Signal. Acta Electron. Sin. 2022, 50, 832–840. [Google Scholar]
- Ge, Y.; Ding, S.; Qin, W.; Zhou, F.; Yang, X.; Wang, S. Performance of ionospheric-free PPP time transfer models with BDS-3 quad-frequency observations. Measurement 2020, 160, 107836. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, F.; Tao, X.; Duan, R. New optimal smoothing scheme for improving relative and absolute accuracy of tightly coupled GNSS/SINS integration. GPS Solut. 2017, 21, 861–872. [Google Scholar] [CrossRef]
- Godha, S.; Cannon, M.E. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Yan, P.; Jiang, J.; Zhang, F.; Xie, D.; Wu, J.; Zhang, C.; Tang, Y.; Liu, J. An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sens. 2021, 13, 4317. [Google Scholar] [CrossRef]
- Wang, M.; Yu, P.; Li, Y. Performance analysis of GNSS/INS loosely coupled integration systems under GNSS signal blocking environment. E3S Web Conf. 2020, 206, 02013. [Google Scholar] [CrossRef]
- Li, W.; Li, W.; Cui, X.; Zhao, S.; Lu, M. A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments. Sensors 2018, 18, 2160. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman filter with both adaptability and robustness for tightly-coupled GNSS/INS integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Zhang, L.; Viktorovich, P.A.; Selezneva, M.S.; Neusypin, K.A. Adaptive Estimation Algorithm for Correcting Low-Cost MEMS-SINS Errors of Unmanned Vehicles under the Conditions of Abnormal Measurements. Sensors 2021, 21, 623. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, S.; Yin, T. GNSS/INS Tightly Coupled Navigation with Robust Adaptive Extended Kalman Filter. Int. J. Automot. Technol. 2022, 23, 1639–1649. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Q.; Niu, X. Kinematic Measurement of the Railway Track Centerline Position by GNSS/INS/Odometer Integration. IEEE Access 2019, 7, 157241–157253. [Google Scholar] [CrossRef]
- Yan, P.; Jiang, J.; Tang, Y.; Zhang, F.; Xie, D.; Wu, J.; Liu, J.; Liu, J. Dynamic Adaptive Low Power Adjustment Scheme for Single-Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation in the Complex Urban Environment. Remote Sens. 2021, 13, 3236. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An automated driving systems data acquisition and analytics platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Zonglin, M.; Xin, X.; Runsheng, X.; Wei, L.; Jiaqi, M. HYDRO-3D: Hybrid Object Detection and Tracking for Cooperative Perception Using 3D LiDAR. IEEE Trans. Intell. Veh. 2023, 99, 1–13. [Google Scholar]
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting Tassels in RGB UAV Imagery with Improved YOLOv5 Based on Transfer Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Huang, Y.; Lu, Y.; Gao, L.; Xu, N.; Yu, Z. Estimation on IMU yaw misalignment by fusing information of automotive onboard sensors. Mech. Syst. Signal Process. 2022, 162, 107993. [Google Scholar] [CrossRef]
- Elzoghby, M.; Arif, U.; Li, F.; Yu, X.Z. Investigation of adaptive robust Kalman filtering algorithms for GPS/DR navigation system filters. IOP Conf. Ser. Mater. Sci. Eng. 2017, 187, 012019. [Google Scholar] [CrossRef]
- Liu, W.; Shi, Y.; Hu, Y.; Hsieh, T.H.; Wang, S. An improved GNSS/INS navigation method based on cubature Kalman filter for occluded environment. Meas. Sci. Technol. 2022, 34, 035107. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, K.; Jiang, C.; Li, Z.; Yang, C.; Liu, D.; Zhang, H. Motion-Constrained GNSS/INS Integrated Navigation Method Based on BP Neural Network. Remote Sens. 2023, 15, 154. [Google Scholar] [CrossRef]
- Yu, H.; Han, H.; Wang, J.; Xiao, H.; Wang, C. Single-Frequency GPS/BDS RTK and INS Ambiguity Resolution and Positioning Performance Enhanced with Positional Polynomial Fitting Constraint. Remote Sens. 2020, 12, 2374. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W.; Zhang, X. Robust Kalman filtering with constraints: A case study for integrated navigation. J. Geod. 2010, 84, 373–381. [Google Scholar] [CrossRef]
- Lin, X.; Yang, X.; Hu, C.; Li, W. Improved forward and backward adaptive smoothing algorithm. GPS Solut. 2022, 26, 2. [Google Scholar] [CrossRef]
- Chiang, K.W.; Lin, C.A.; Peng, K.Y. The Performance Analysis of an AKF Based Tightly-Coupled INS/GNSS Sensor Fusion Scheme with Non-Holonomic Constraints for Land Vehicular Applications. Appl. Mech. Mater. 2013, 284–287, 1956–1960. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control. Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Wei, L.; Lu, X.; Yishi, L.; Letian, G.; Zhuoping, Y. Automated Vehicle Sideslip Angle Estimation Considering Signal Measurement Characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Yu, Z. IMU-Based Automated Vehicle Body Sideslip Angle and Attitude Estimation Aided by GNSS Using Parallel Adaptive Kalman Filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided Intelligent Vehicle Sideslip Angle Estimation Based on Dynamic Model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Wen, W.; Kan, Y.C.; Hsu, L.T. Performance comparison of GNSS/INS integrations based on EKF and factor graph optimization. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, FL, USA, 16–20 September 2019; pp. 3019–3032. [Google Scholar]
- Falco, G.; Pini, M.; Marucco, G. Loose and tight GNSS/INS integrations: Comparison of performance assessed in real urban scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef]
- Li, Y.; Mi, J.; Xu, Y.; Li, B.; Jiang, D.; Liu, W. A Robust Adaptive Filtering Algorithm for GNSS Single-Frequency RTK of Smartphone. Remote Sens. 2022, 14, 6388. [Google Scholar] [CrossRef]
- Li, B.; Chen, G. Improving the combined GNSS/INS positioning by using tightly integrated RTK. GPS Solut. 2022, 26, 144. [Google Scholar] [CrossRef]
- Yang, Y. Adaptively Robust Kalman Filters with Applications in Navigation. In Adaptive Navigation and Kinematic Positioning, 2nd ed.; SinoMaps: Beijing, China, 2017; pp. 50–75. [Google Scholar]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, D.; Zhang, L.; Li, Q.; Wu, J. Tightly Coupled GNSS/INS Integration with Robust Sequential Kalman Filter for Accurate Vehicular Navigation. Sensors 2020, 20, 561. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Niu, X.; Zhang, Q. Performance Analysis of Tightly Coupled RTK/INS Algorithm in Case of Insufficient Number of Satellites. Geomat. Inf. Wuhan Univ. 2018, 43, 478–484. [Google Scholar]
- Shi, B.; Wang, M.; Wang, Y.; Bai, Y.; Lin, K.; Yang, F. Effect analysis of GNSS/INS processing strategy for sufficient utilization of urban environment observations. Sensors 2021, 21, 620. [Google Scholar] [CrossRef]
- Qiao, S.; Fan, Y.; Wang, G.; Mu, D.; He, Z. Radar Target Tracking for Unmanned Surface Vehicle Based on Square Root Sage–Husa Adaptive Robust Kalman Filter. Sensors 2022, 22, 2924. [Google Scholar] [CrossRef]
- Peng, Z.; Gao, C.; Shang, R. Application of Sage-Husa filter considering innovation vectors in mobile phone GNSS location. J. Navig. Position. 2020, 8, 76–81, 89. [Google Scholar]
- Zhao, X.; Qian, Y.; Zhang, M.; Niu, J.; Kou, Y. An improved adaptive Kalman filtering algorithm for advanced robot navigation system based on GPS/INS. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 1039–1044. [Google Scholar]
- Yang, Z.; Li, Z.; Liu, Z.; Wang, C.; Sun, Y.; Shao, K. Improved robust and adaptive filter based on non-holonomic constraints for RTK/INS integrated navigation. Meas. Sci. Technol. 2021, 32, 105110. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Niu, X.; Gao, Z. Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance. Sensors 2017, 17, 2462. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Gao, Z.; Chen, Q.; Niu, X. High-Accuracy Positioning in Urban Environments Using Single-Frequency Multi-GNSS RTK/MEMS-IMU Integration. Remote Sens. 2018, 10, 205. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2008, 57, 140–149. [Google Scholar] [CrossRef]
- Elsobeiey, M.; El-Rabbany, A. Efficient between-satellite single-difference precise point positioning model. J. Surv. Eng. 2014, 140, 1009–1016. [Google Scholar] [CrossRef]
- Jiahao, W. Research on GNSS RTK/INS/Vehicle Auxiliary Information Tightly-Coupled Multi-Source Navigation and Positioning Algorithm. Master’s Thesis, Wuhan University, Wuhan, China, 2019. [Google Scholar]
- Hsu, L.T.; Kubo, N.; Wen, W.; Chen, W.; Liu, Z.; Suzuki, T.; Meguro, J. UrbanNav: An open-sourced multisensory dataset for benchmarking positioning algorithms designed for urban areas. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Parameters | M39 | SPAN-CPT |
|---|---|---|
| Gyro Range | ±100 deg/s | ±375 deg/s |
| Gyro Bias Instability | 8 deg/hr | 1 deg/hr |
| Angular Random Walk | 0.12 deg/hr0.5 | 0.0667 deg/hr0.5 |
| Accel. Range | ±5 g | ±10 g |
| Accel. Bias Instability | 0.2 mg | 0.75 mg |
| Position RMS (m) | Velocity RMS (m/s) | Attitude RMS (deg) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| North | East | Up | North | East | Up | Roll | Pitch | Yaw | |
| TCKF | 3.5867 | 3.2904 | 1.7082 | 1.8548 | 0.6202 | 0.6889 | 0.4040 | 0.3446 | 5.3014 |
| TCAKF | 0.5362 | 0.7287 | 0.5015 | 0.0691 | 0.0620 | 0.0635 | 0.1097 | 0.0997 | 0.9190 |
| TCRKF | 0.4496 | 0.6393 | 0.4039 | 0.0396 | 0.0456 | 0.0432 | 0.1061 | 0.0896 | 0.9119 |
| New scheme | 0.4339 | 0.4951 | 0.2757 | 0.0280 | 0.0451 | 0.0282 | 0.1090 | 0.0885 | 0.9634 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Jiang, J.; Zhang, C.; Li, Y.; Yan, P.; Meng, X. A Novel Optimal Robust Adaptive Scheme for Accurate GNSS RTK/INS Tightly Coupled Integration in Urban Environments. Remote Sens. 2023, 15, 3725. https://doi.org/10.3390/rs15153725
Wu J, Jiang J, Zhang C, Li Y, Yan P, Meng X. A Novel Optimal Robust Adaptive Scheme for Accurate GNSS RTK/INS Tightly Coupled Integration in Urban Environments. Remote Sensing. 2023; 15(15):3725. https://doi.org/10.3390/rs15153725
Chicago/Turabian StyleWu, Jiaji, Jinguang Jiang, Chao Zhang, Yuying Li, Peihui Yan, and Xiaoliang Meng. 2023. "A Novel Optimal Robust Adaptive Scheme for Accurate GNSS RTK/INS Tightly Coupled Integration in Urban Environments" Remote Sensing 15, no. 15: 3725. https://doi.org/10.3390/rs15153725
APA StyleWu, J., Jiang, J., Zhang, C., Li, Y., Yan, P., & Meng, X. (2023). A Novel Optimal Robust Adaptive Scheme for Accurate GNSS RTK/INS Tightly Coupled Integration in Urban Environments. Remote Sensing, 15(15), 3725. https://doi.org/10.3390/rs15153725