


Improved Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Two-Step Sorting Criterion


Abstract
1. Introduction
2. Multi-GNSS PPP AR Model
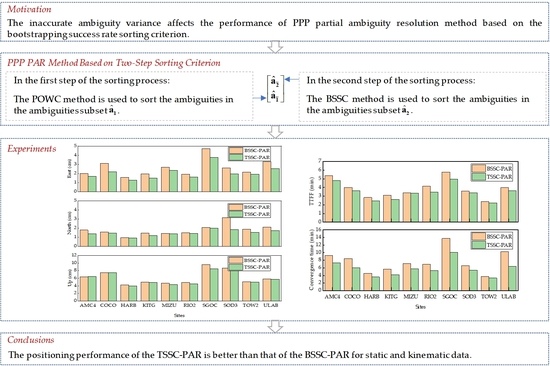
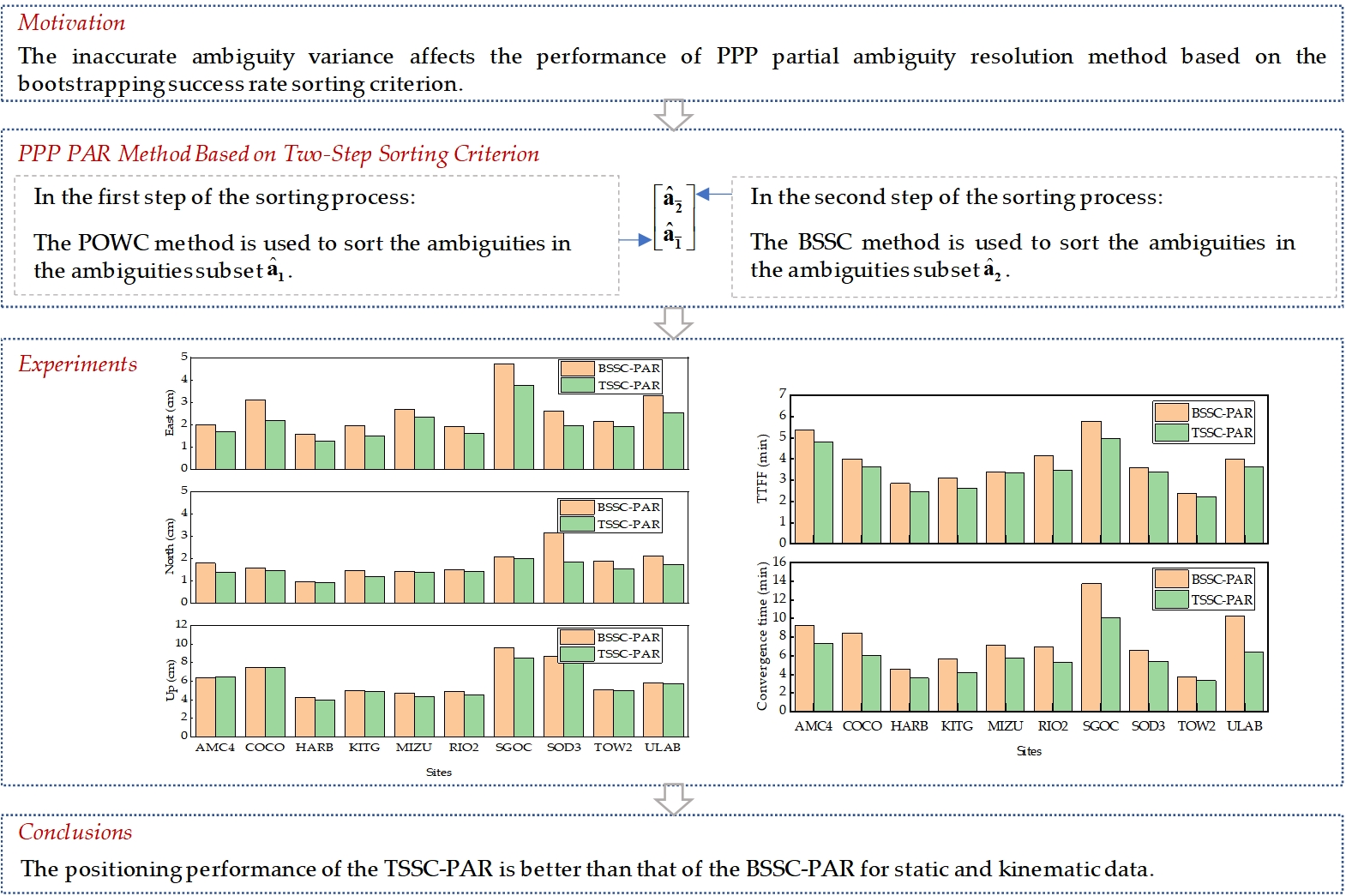
3. PPP PAR Method Based on Two-Step Sorting Criterion
3.1. Posterior Observation Weight Criterion
3.2. Bootstrapping Success Rate Sorting Criterion
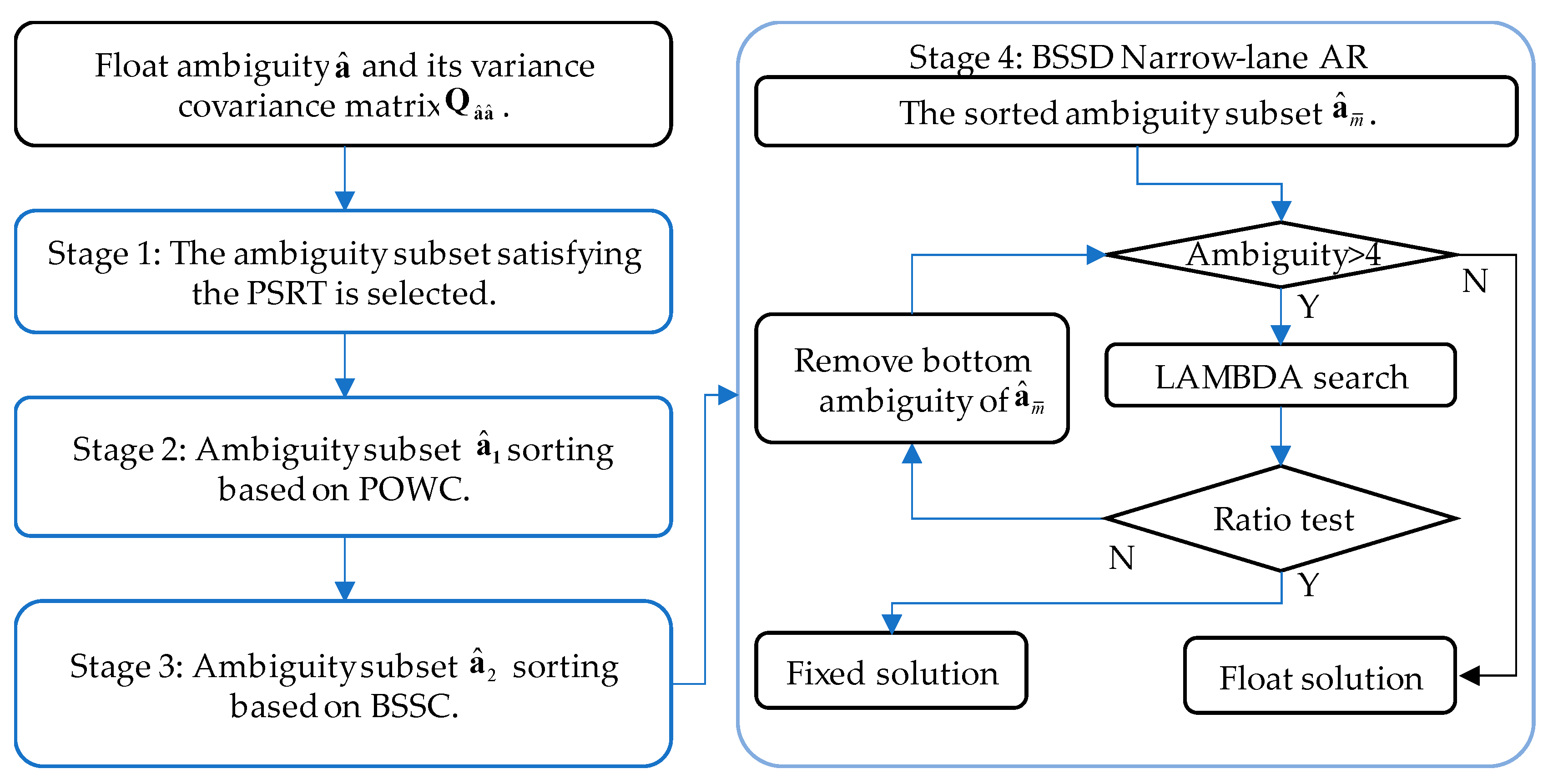
- Stage 1. The ambiguity subset satisfying the PSRT is selected to reduce the influence of unconverged ambiguity on the TSSC.
- Stage 2. In the first step of sorting based on TSSC, the POWC method is used to sort the ambiguities in the ambiguities subset , and the sorted ambiguities subset is denoted as . This process helps avoid selecting inaccurate variance of the ambiguity based on the BSSC method.
- Stage 3. In the second step of sorting based on TSSC, the BSSC method is used to sort the ambiguities in the ambiguities subset , and the sorted ambiguities subset is denoted as . and are combined to form .
- Stage 4. Finally, the bottom ambiguity from is one by one excluded until either the ratio test is met or the number of participating fixed ambiguities falls below 5. Otherwise, the float solution is output.

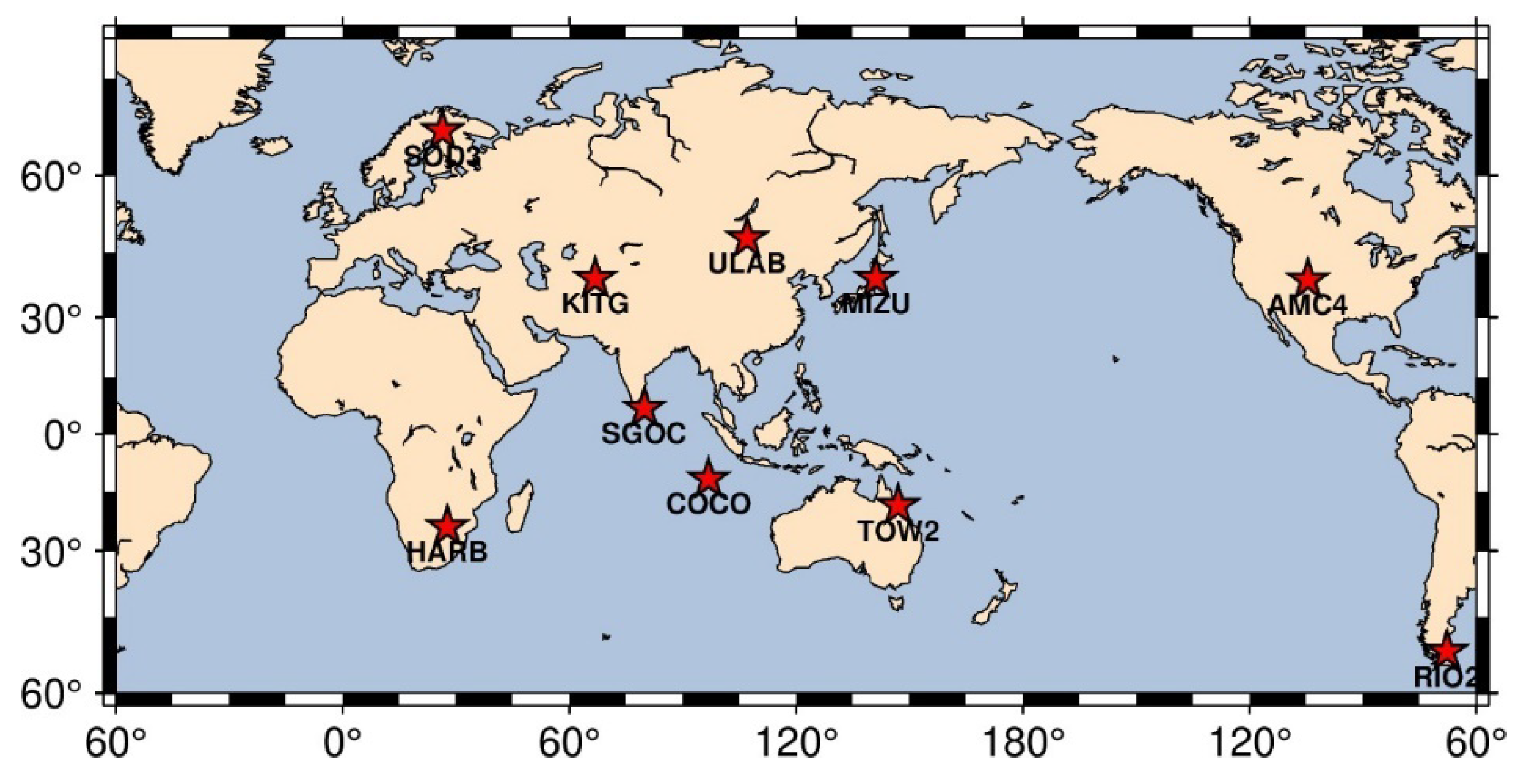
4. Experiments and Analysis
4.1. The Static Experiment
The AMC4 Station Experiment
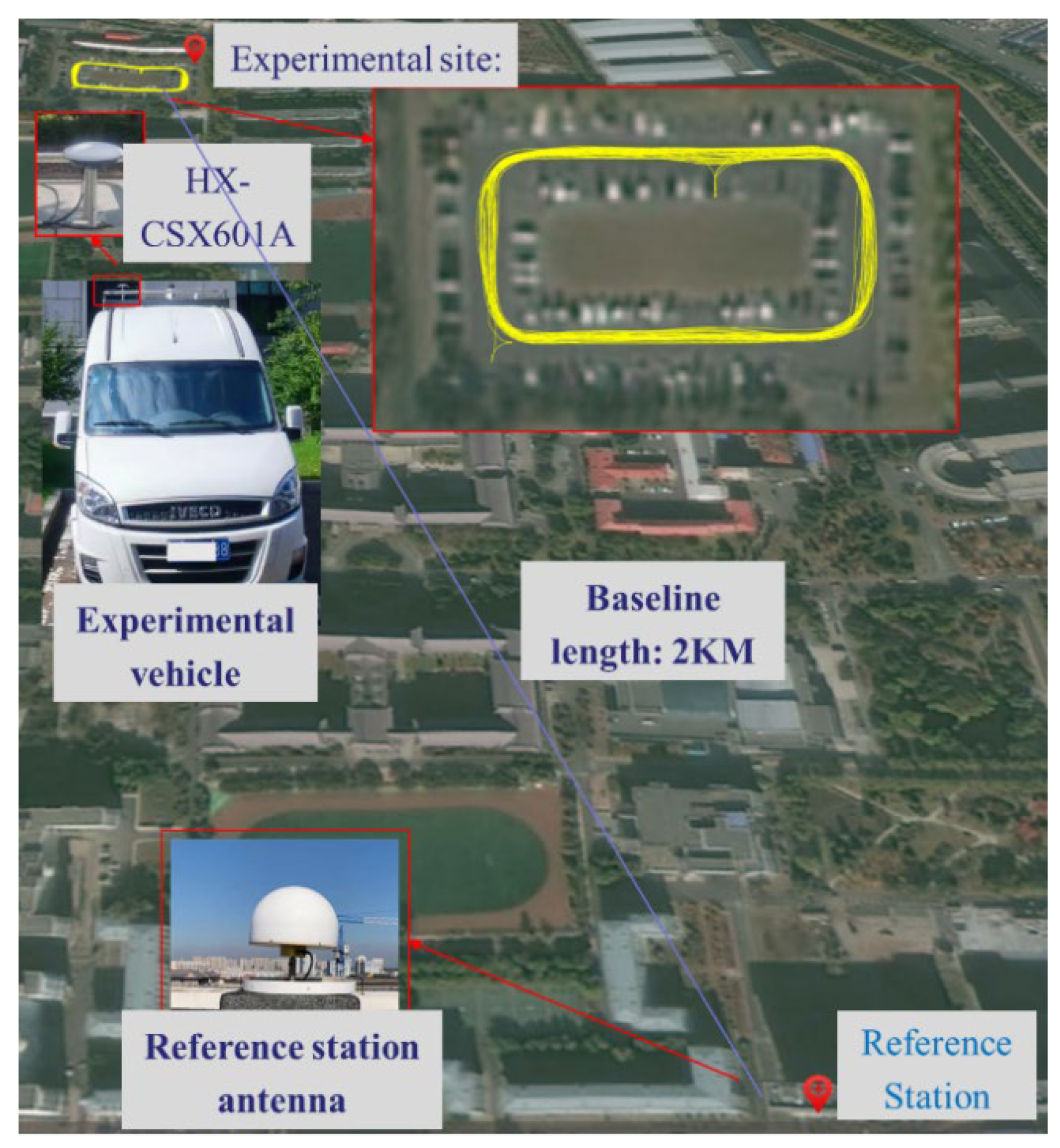
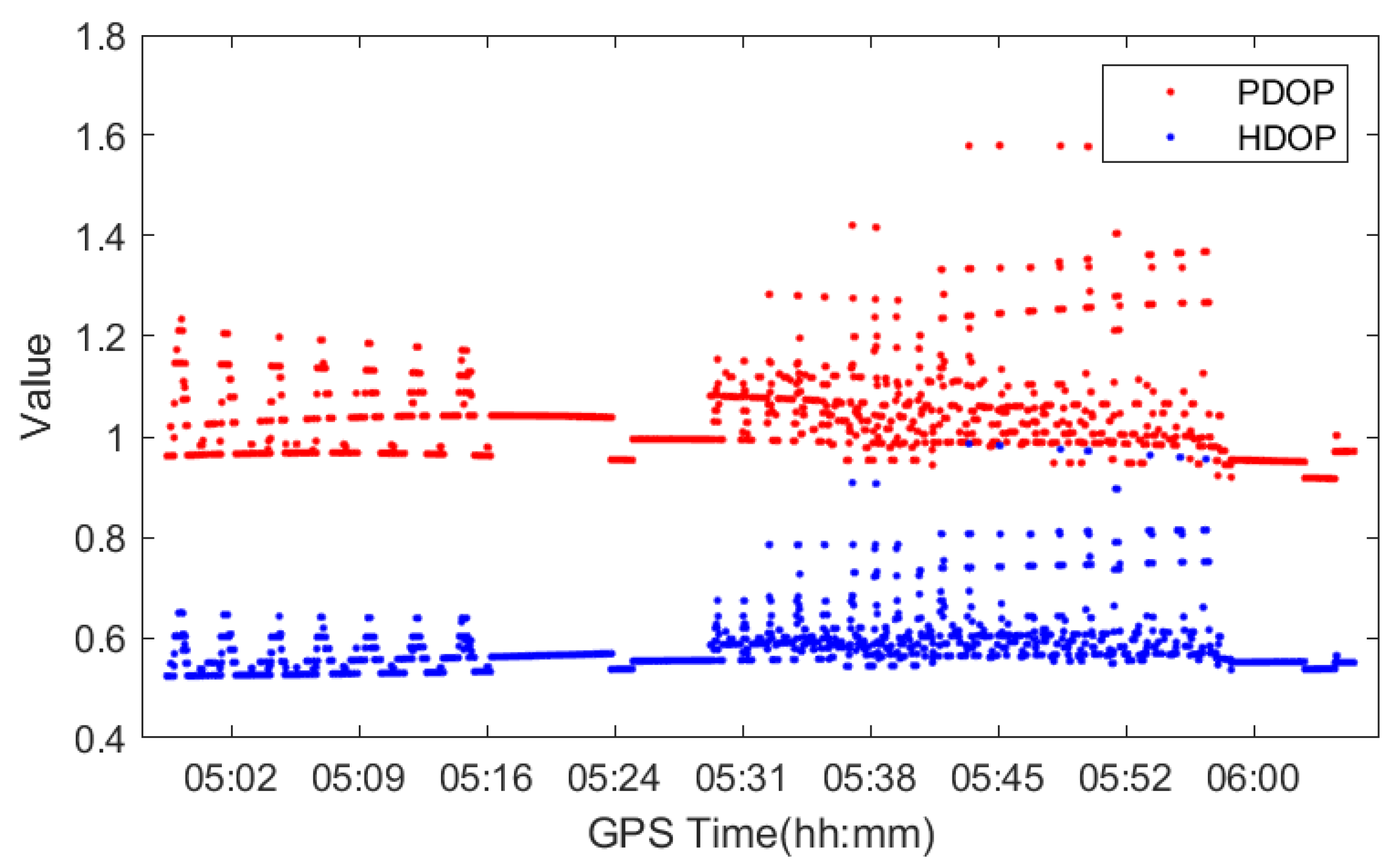
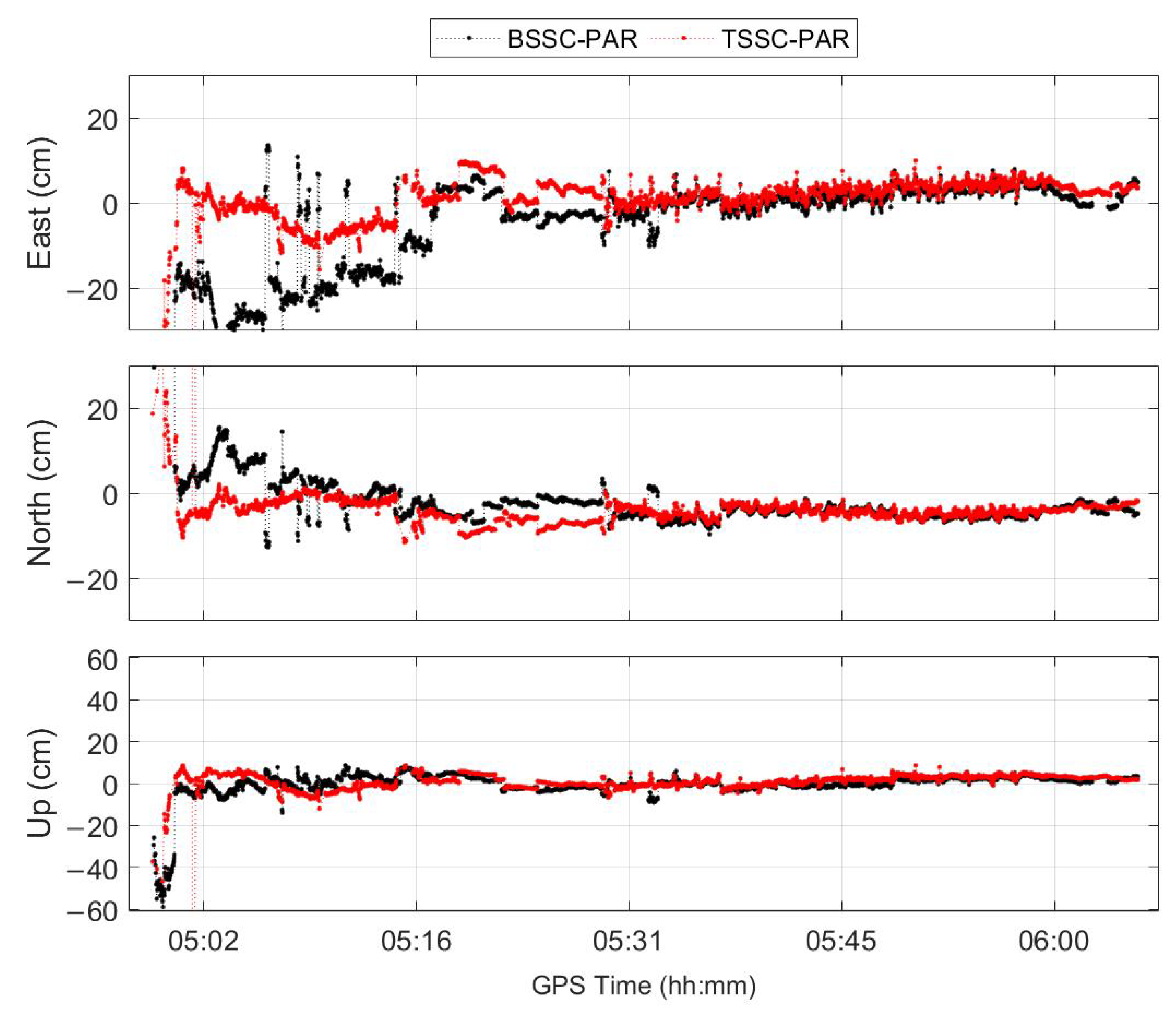
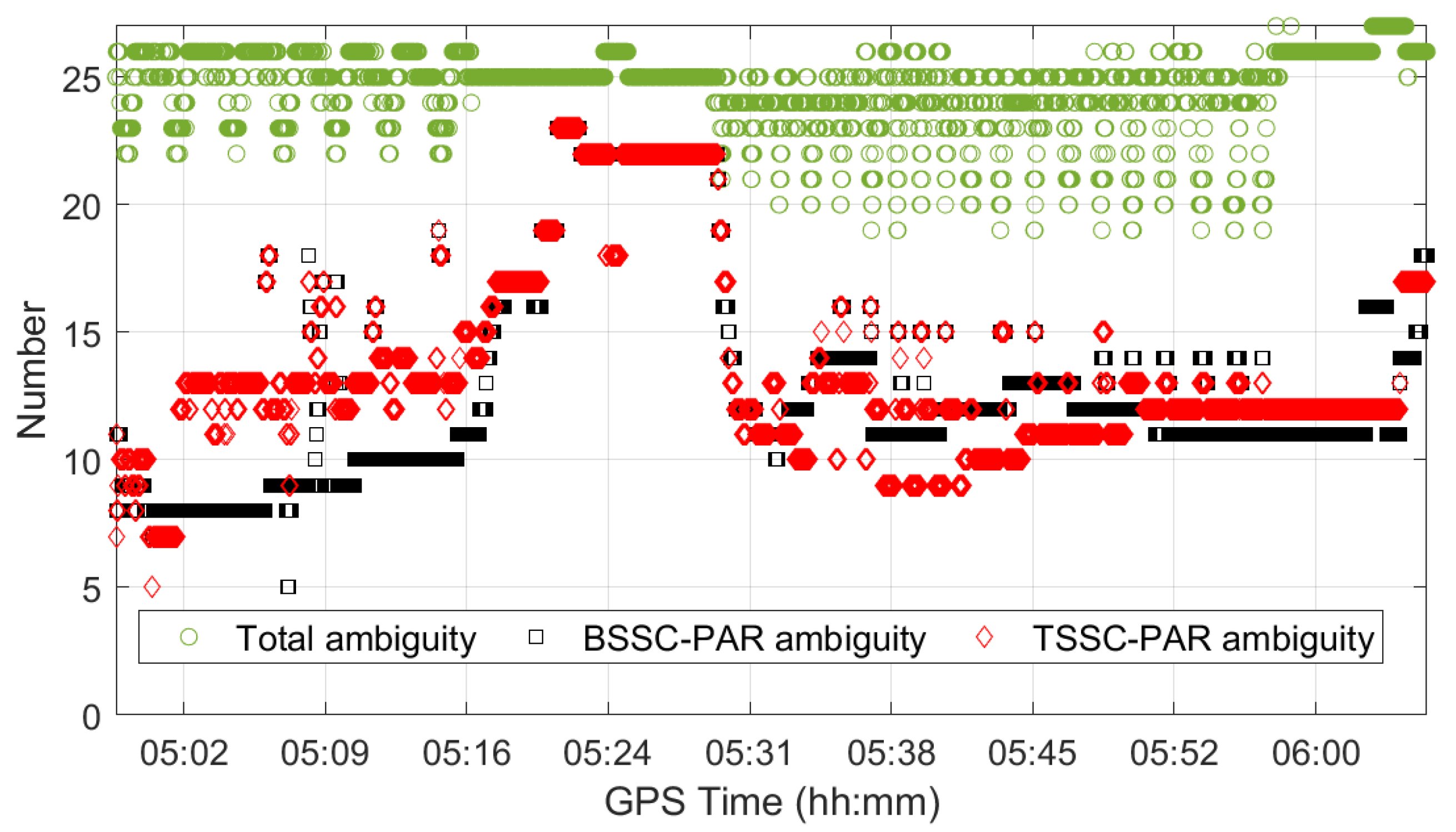
4.2. The Kinematic Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid. Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.P.; Broca, P.; Cerri, L. Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Annu. Navig. 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; Héroux, P. Undifferenced GPS Ambiguity Resolution Using the Decoupled Clock Model and Ambiguity Datum Fixing. Annu. Navig. 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S.; Teunissen, P.J.G. Precision analysis of partial ambiguity resolution-enabled PPP using multi-GNSS and multi-frequency signals. Adv. Space Res. 2020, 66, 2075–2093. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, H.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.; Teferle, N. Integer ambiguity resolution in precise point positioning: Method comparison. J. Geod. 2010, 84, 569–581. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Liu, S.; Tao, J.; Hu, Z.; Chen, G. A variant of raw observation approach for BDS/GNSS precise point positioning with fast integer ambiguity resolution. Satell. Navig. 2021, 2, 29. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Yang, F.; Zheng, C.; Zhang, J.; Sun, Z.; Li, L.; Zhao, L. The Initial Performance Evaluation of Mixed Multi-Frequency Undifferenced and Uncombined BDS-2/3 Precise Point Positioning under Urban Environmental Conditions. Remote. Sens. 2022, 14, 5525. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, L.; Yang, F.; Li, L.; Liu, X.; Zhang, R. Integrity monitoring for undifferenced and uncombined PPP under the local environment. Meas. Sci. Technol. 2022, 33, 065010. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X. Precise Point Positioning with Partial Ambiguity Fixing. Sensors 2015, 15, 13627–13643. [Google Scholar] [CrossRef] [PubMed]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef]
- Mowlam, A. Baseline Precision Results Using Triple Frequency Partial Ambiguity Sets. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS 2004, Long Beach, CA, USA, 21–24 September 2004; Institute of Navigation: Long Beach, CA, USA, 2004; pp. 2509–2518. [Google Scholar]
- Teunissen, P. Integer Aperture GNSS Ambiguity Resolution. Artif. Satell. 2003, 38, 79–88. [Google Scholar]
- Teunissen, P.; Verhagen, S. The GNSS Ambiguity Ratio-test Revisited: A Better Way of Using it. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]
- Teunissen, P.; Verhagen, S. Integer Aperture Estimation—A Framework for GNSS Ambiguity Acceptance Testing. Inside GNSS 2011, 2011, 66–73. [Google Scholar]
- Li, L.; Shi, H.; Jia, C.; Cheng, J.; Li, H.; Zhao, L. Position-domain integrity risk-based ambiguity validation for the integer bootstrap estimator. GPS Solut. 2018, 22, 39. [Google Scholar] [CrossRef]
- Wang, J.; Feng, Y. Reliability of partial ambiguity fixing with multiple GNSS constellations. J. Geod. 2013, 87, 3. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Feng, Y.; Gao, W.; Yang, L. GNSS ambiguity resolution with controllable failure rate for long baseline network RTK. J. Geod. 2014, 88, 99–112. [Google Scholar] [CrossRef]
- Li, Z.; Xu, G.L.; Guo, J.; Zhao, Q.L. A sequential ambiguity selection strategy for partial ambiguity resolution during RTK positioning in urban areas. GPS Solut. 2022, 26, 92. [Google Scholar] [CrossRef]
- Gendt, G.; Dick, G.; Reigber, C.; Tomassini, M.; Liu, Y. Demonstration of NRT GPS water vapor monitoring for numerical weather prediction in Germany. J. Meteorol. Soc. Jpn. 2004, 82, 361–370. [Google Scholar] [CrossRef]
- Geng, J.; Chen, X.; Pan, Y.; Mao, S.; Zhang, K. PRIDE PPP-AR: An open-source software for GPS PPP ambiguity resolution. GPS Solut. 2019, 23, 91. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, L.; Yang, F.; Zhang, J.; Zhang, R. A Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Observations Weight Ranking. In Proceedings of the the 2023 International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 22–25 January 2023; pp. 624–636. [Google Scholar]
- Henkel, P.; Günther, C. Partial integer decorrelation: Optimum trade-off between variance reduction and bias amplification. J. Geod. 2010, 84, 51–63. [Google Scholar] [CrossRef]
- Gao, W.; Gao, C.; Pan, S. A method of GPS/BDS/GLONASS combined RTK positioning for middle-long baseline with partial ambiguity resolution. Surv. Rev. 2015, 49, 1752270615Y.000. [Google Scholar] [CrossRef]
- Tabaček, J.; Havlena, V. Schmidt-Kalman Filters for Systems with Uncertain. Parameters and Asynchronous Sampling. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Republic of Korea, 17–20 October 2018; pp. 357–362. [Google Scholar]
- Zanetti, R.; D’Souza, C. Recursive Implementations of the Schmidt-Kalman ‘Consider’ Filter. J. Astronaut. Sci. 2013, 60, 672–685. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Villiger, A.; Schaer, S.; Dach, R.; Prange, L.; Sušnik, A.; Jäggi, A. Determination of GNSS pseudo-absolute code biases and their long-term combination. J. Geod. 2019, 93, 1487–1500. [Google Scholar] [CrossRef]
- Schaer, S. Bias-SINEX Format and Implications for IGS Bias Products. IGS Workshop 2018. Available online: https://files.igs.org/pub/data/format/sinex_bias_100.pdf (accessed on 24 February 2023).
- Hatch, R.R. The Synergism of GPS Code and Carrier Measurements. Int. Geod. Symp. Satell. Doppler Position 1982, 2, 1213–1231. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; US Department of Commerce: Rockville, MD, USA, 1985; pp. 373–386. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with GPS using TI 4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; US Department of Commerce: Rockville, MD, USA, 1985; pp. 403–412. [Google Scholar]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, L.; Li, L.; Feng, S.; Cheng, J. Performance Evaluation of Kinematic BDS/GNSS Real-Time Precise Point Positioning for Maritime Positioning. J. Navig. 2019, 72, 34–52. [Google Scholar] [CrossRef]
- Shu, B.; Liu, H.; Wang, L.; Huang, G.; Zhang, Q.; Yang, Z. Performance improvement of real-time PPP ambiguity resolution using a regional integer clock. Adv. Space Res. 2021, 67, 1623–1637. [Google Scholar] [CrossRef]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Liu, T.; Chen, H.; Chen, Q.; Jiang, W.; Laurichesse, D.; An, X.; Geng, T. Characteristics of phase bias from CNES and its application in multi-frequency and multi-GNSS precise point positioning with ambiguity resolution. GPS Solut. 2021, 25, 58. [Google Scholar] [CrossRef]
- Loyer, S.; Banville, S.; Geng, J.; Strasser, S. Exchanging satellite attitude quaternions for improved GNSS data processing consistency. Adv. Space Res. 2021, 68, 2441–2452. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Strategy |
|---|---|
| Observations | IF combination of code and carrier phase |
| Cutoff | 10° |
| Satellite orbit/clock errors | WHU precise orbit and carrier phase clock products (ftp://igs.gnsswhu.cn/pub/whu/phasebias, accessed on 24 February 2023) |
| Satellite code and carrier phase bias | WHU OSBs products |
| System and signal frequency | GPS: L1/L2; BDS: B1I/B3I; Galileo: E1/E5a |
| A priori noise | Code: 0.3 m; Carrier phase: 0.003 m MEO: IGSO = 1:1 [37] |
| Weighting | where |
| Inter-system biases | Constant |
| Tropospheric zenith hydrostatic delay | Saastamoinen (GPT2) [38] |
| Zenith wet tropospheric delay | Mapping function: GMF; modeled by a random walk estimation with system noise [39] |
| Antenna phase centers | igs14_2188.atx [40] |
| IF ambiguity | Constant and random walk |
| Reference satellite | Maximum elevation angle satellite |
| Parameter estimation method | Forward Kalman filter based on IGG-3 |
| Ambiguity resolution | LAMBDA search |
| Ratio value | 2.0 [41] |
| Minimum success rate threshold | 99.9% [13] |
| Solution | East (mm) | North (mm) | Up (mm) | TTFF (min) | Convergence Time (min) |
|---|---|---|---|---|---|
| BSSC-PAR | 17.1 | 12.2 | 46.3 | 6.0 | 9.5 |
| TSSC-PAR | 13.1 | 11.5 | 42.5 | 4.3 | 7.7 |
| Solution | East (mm) | North (mm) | Up (mm) | TTFF (min) | Convergence Time (min) |
|---|---|---|---|---|---|
| BSSC-PAR | 20.2 | 17.9 | 53.3 | 5.4 | 9.3 |
| TSSC-PAR | 15.1 | 13.9 | 47.5 | 4.8 | 7.3 |
| Solution | East (mm) | North (mm) | Up (mm) | TTFF (min) | Convergence Time (min) |
|---|---|---|---|---|---|
| BSSC-PAR | 17.1 | 12.2 | 46.3 | 3.45 | 6.25 |
| TSSC-PAR | 13.1 | 11.5 | 42.5 | 3.15 | 5.2 |
| Experiment | Information |
|---|---|
| Starting time | 2021, 258, GPS time 04:58:45 |
| Ending time | 2021, 258, GPS time 06:05:39 |
| Sampling interval (s) | 1 |
| Base station receiver | OEM628E |
| Base station antenna | Novatel 750 |
| Rover station receiver | OEM729 |
| Rover station antenna | Harxon HX-CSX601A |
| Solution | East (mm) | North (mm) | Up (mm) | TTFF (min) | Convergence Time (min) |
|---|---|---|---|---|---|
| BSSC-PAR | 65.2 | 42.7 | 27.3 | 1.65 | 10.5 |
| TSSC-PAR | 40.3 | 42.1 | 26.7 | 1.3 | 1.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Sun, Z.; Yang, F.; Liu, X.; Zhang, J. Improved Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Two-Step Sorting Criterion. Remote Sens. 2023, 15, 3319. https://doi.org/10.3390/rs15133319
Zhao L, Sun Z, Yang F, Liu X, Zhang J. Improved Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Two-Step Sorting Criterion. Remote Sensing. 2023; 15(13):3319. https://doi.org/10.3390/rs15133319
Chicago/Turabian StyleZhao, Lin, Zhiguo Sun, Fuxin Yang, Xiaosong Liu, and Jie Zhang. 2023. "Improved Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Two-Step Sorting Criterion" Remote Sensing 15, no. 13: 3319. https://doi.org/10.3390/rs15133319
APA StyleZhao, L., Sun, Z., Yang, F., Liu, X., & Zhang, J. (2023). Improved Multi-GNSS PPP Partial Ambiguity Resolution Method Based on Two-Step Sorting Criterion. Remote Sensing, 15(13), 3319. https://doi.org/10.3390/rs15133319