
Shoreline Analysis and Extraction Tool (SAET): A New Tool for the Automatic Extraction of Satellite-Derived Shorelines with Subpixel Accuracy


 ,
, 
Abstract
1. Introduction
2. Software Rationale, Capabilities and Usage
2.1. Rationale
- The shoreline position will be defined immediately before and after the storm event by analysing the pre-storm and post-storm satellite images available closest in time. The shoreline definition must be time efficient, making the resulting SDS available in a short period after the storm takes place.
- As large coastal storms can affect broad regions, shoreline definition may be carried out covering long beach segments (tens or hundreds of kilometres).
- The system must be able to operate fully automatically and its applicability to all European coasts must be ensured. It must therefore be able to operate based on data that are available for the entire European coastline and not just for certain specific areas.
- Since SAET has been designed to provide data to the ECFAS project, which is intended to constitute a Copernicus service, it must be ensured that the tool can operate almost automatically to efficiently obtain the results.
- Considering that it must work in a wide variety of environments, the process must be flexible, enabling the user to choose multiple settings (water indices, segmentation methods, cloud masking severity, etc.) to refine the shoreline definition if needed.
- Since it has been designed to be used within a Copernicus service, SAET must ensure direct interconnection with the data providers. Therefore, platforms for downloading and managing the images such as Google Earth Engine are avoided, and the system only relies on the official hubs of the satellite image providers (ESA and USGS).
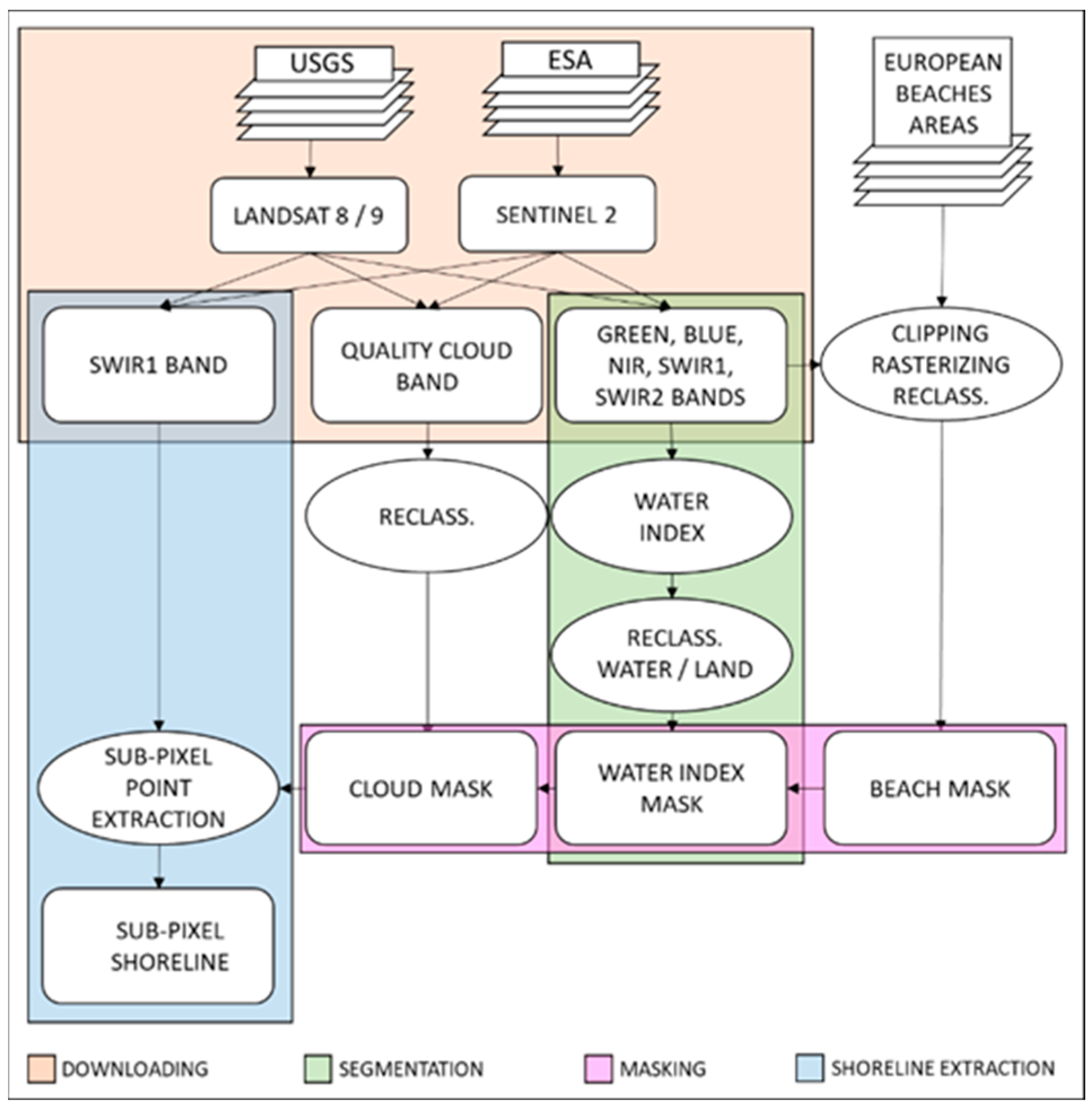
2.2. Workflow
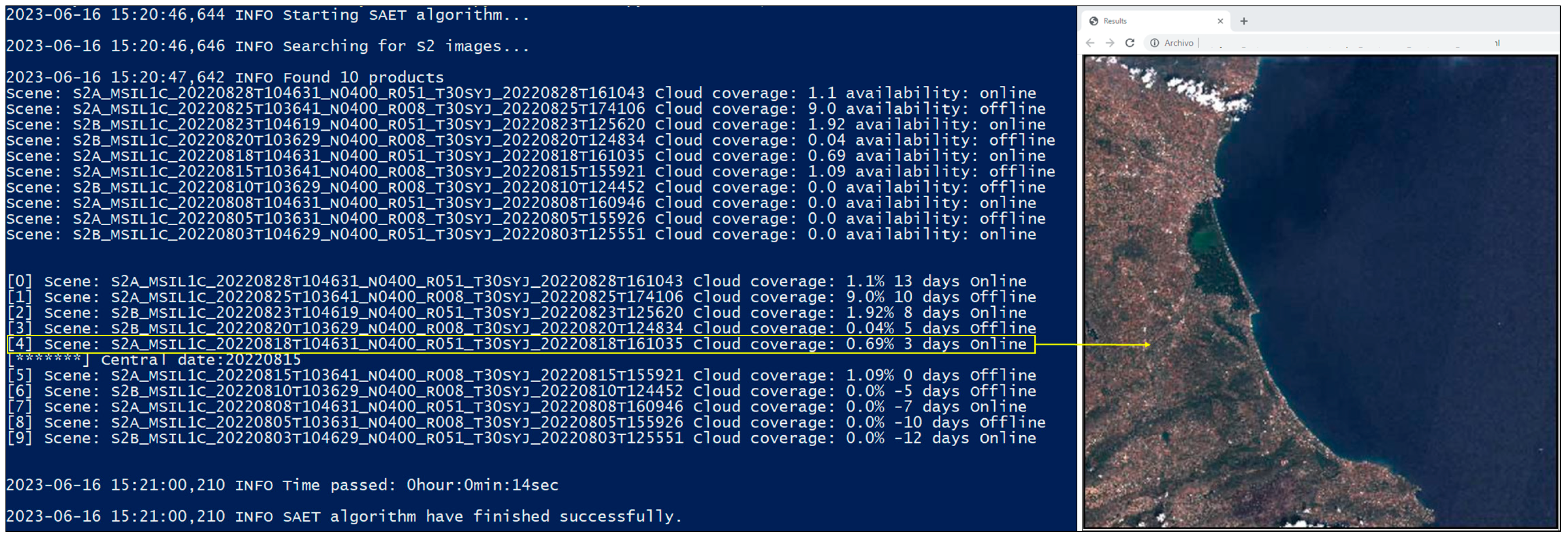
- Image downloading. SAET is able to analyse entire image scenes, allowing the downloading of S2 and L8–9 images from ESA and USGS servers, respectively. To improve the performance, SAET takes advantage of the capabilities of each server, downloading only the necessary bands when possible. Regarding the ESA server, only the most recently acquired images are immediately available (online mode). On the contrary, it is required to request a specific image to shift from offline to online modes (https://scihub.copernicus.eu/userguide/DataRestoration, accessed on 1 June 2023). This process is relatively fast and does not constitute an important drawback, but the user must be aware of this.
- Water–land interface segmentation. SAET allows employing different procedures for separating the land and the water coverages. Thus, the images can be segmented by using the clusterisation technique k-means or by combining different bands to create several water indices to obtain a binary water–land mask to determine the position of the shoreline at the pixel level.
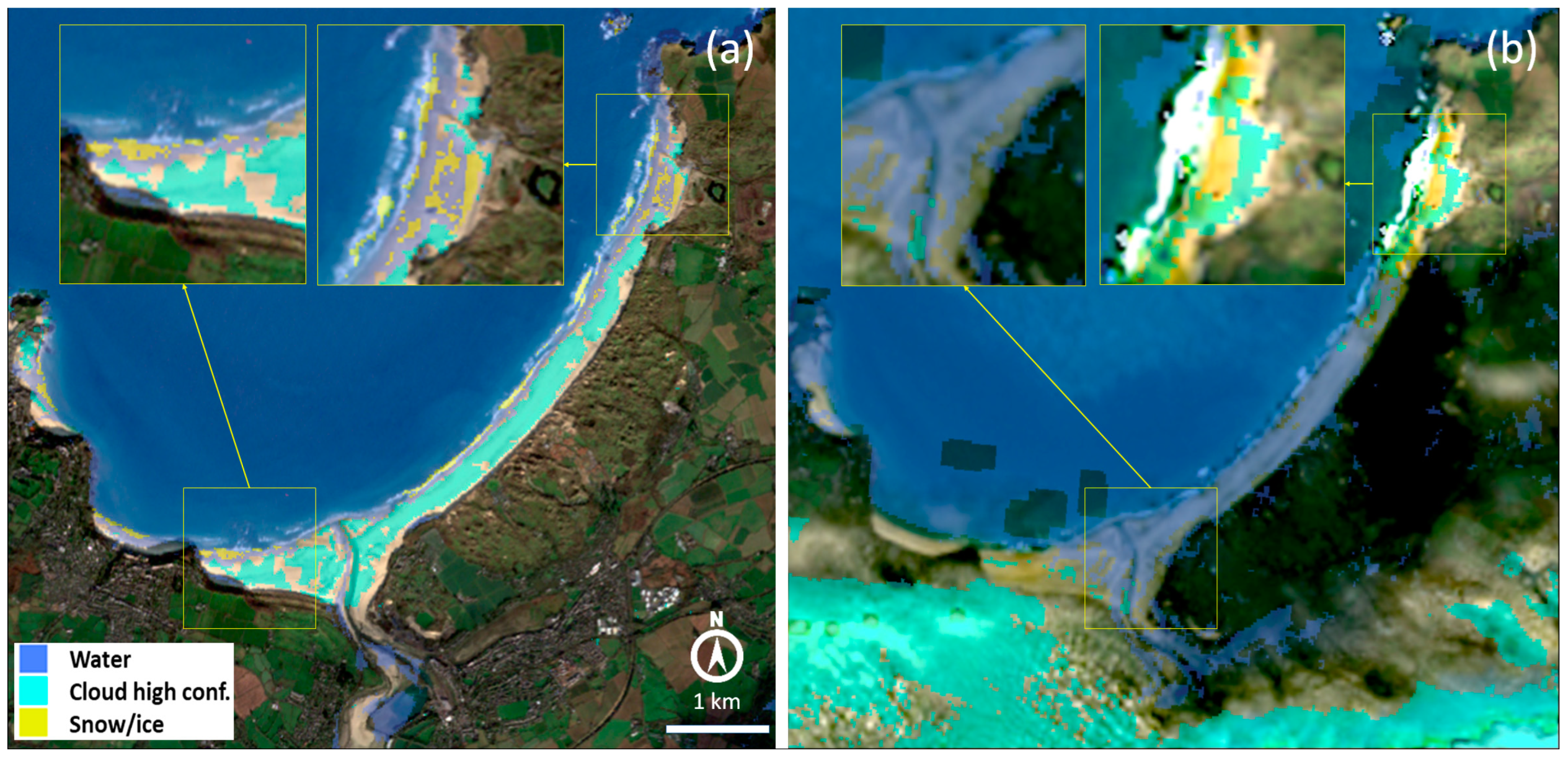
- Water–land mask refinement. Considering the water-land mask as input, SAET removes all shoreline pixels lying outside beach areas or those that are in pixels classified as clouds. Cloud coverage distribution is obtained from the classification bands associated with both S2 and L8–9 images. On the other hand, beach areas are obtained from the European Coastal Zone dataset, provided by the Copernicus Land Monitoring Service [39].
- Sub-pixel shoreline extraction. From the pixel-level shoreline obtained in the previous step, SAET computes a new shoreline with sub-pixel accuracy. The core algorithm for sub-pixel shoreline extraction used for SAET takes advantage of the SHOREX system [25,26]. The extraction is carried out by performing a kernel analysis for each pixel classified as shoreline, analysing the gradient variation of the pixel values of the SWIR1 band, as this band has a high contrast between water and land and, at the same time, is less sensitive to disturbing effects, such as those caused by the wave foam, for example. The resulting shorelines can be stored in different geometries and file formats (e.g., polylines or points, SHP or JSON).
2.3. Usage: Running Modes and Main Settings
2.4. SAET Customization
- (i)
- those (‘wi’ and ‘th’) that let the user choose the band to be segmented (water indices or bands) and the segmentation procedure,
- (ii)
- those controlling the intensity of the cloud mask, helping to remove shoreline pixels classified as clouds (‘cl’),
- (iii)
- and finally, those controlling the window size in the kernel analysis (‘ks’).
3. Assessment and Example of Application
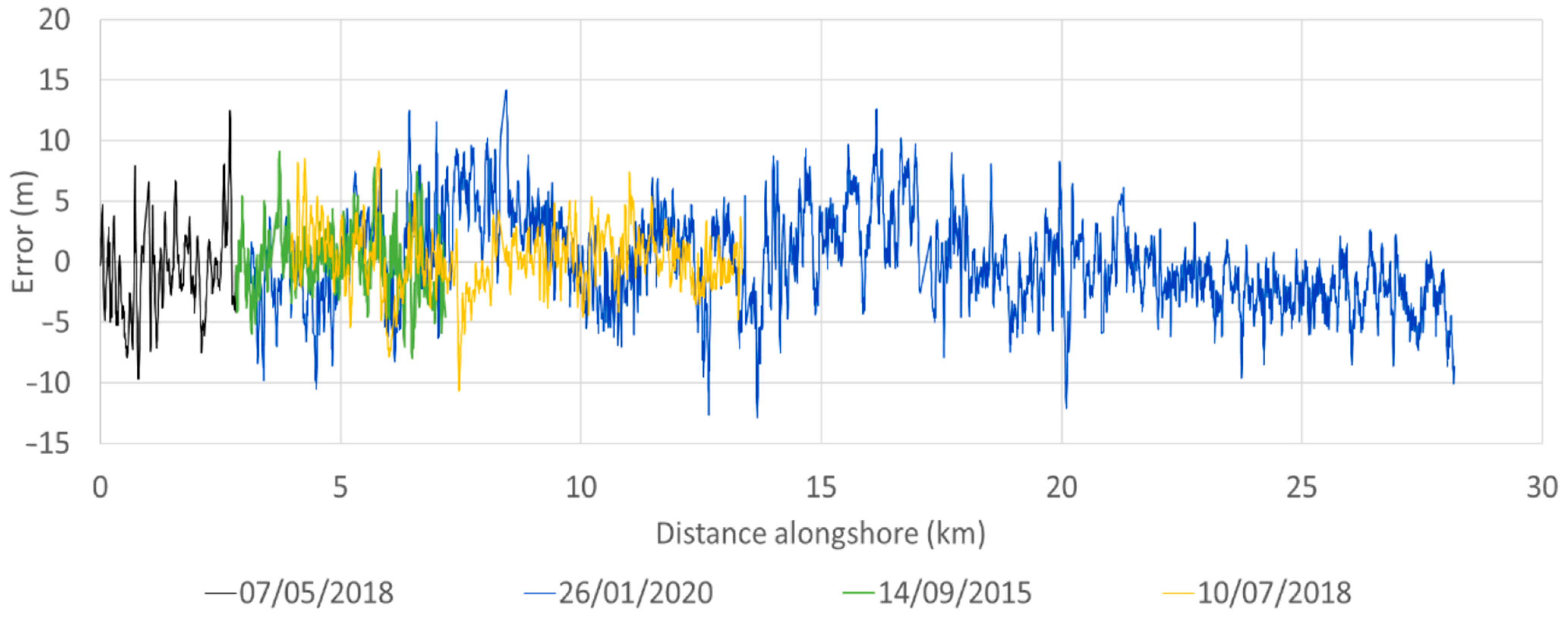
3.1. Accuracy Assessment of the SDSs against Coincident Reference Lines
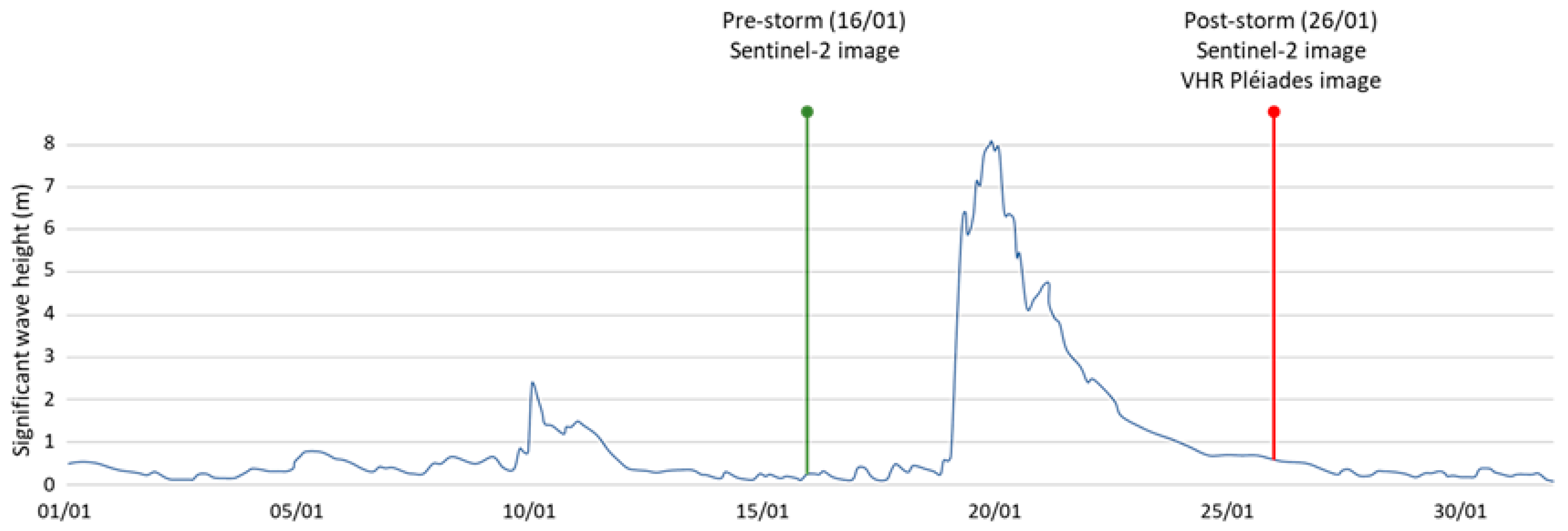
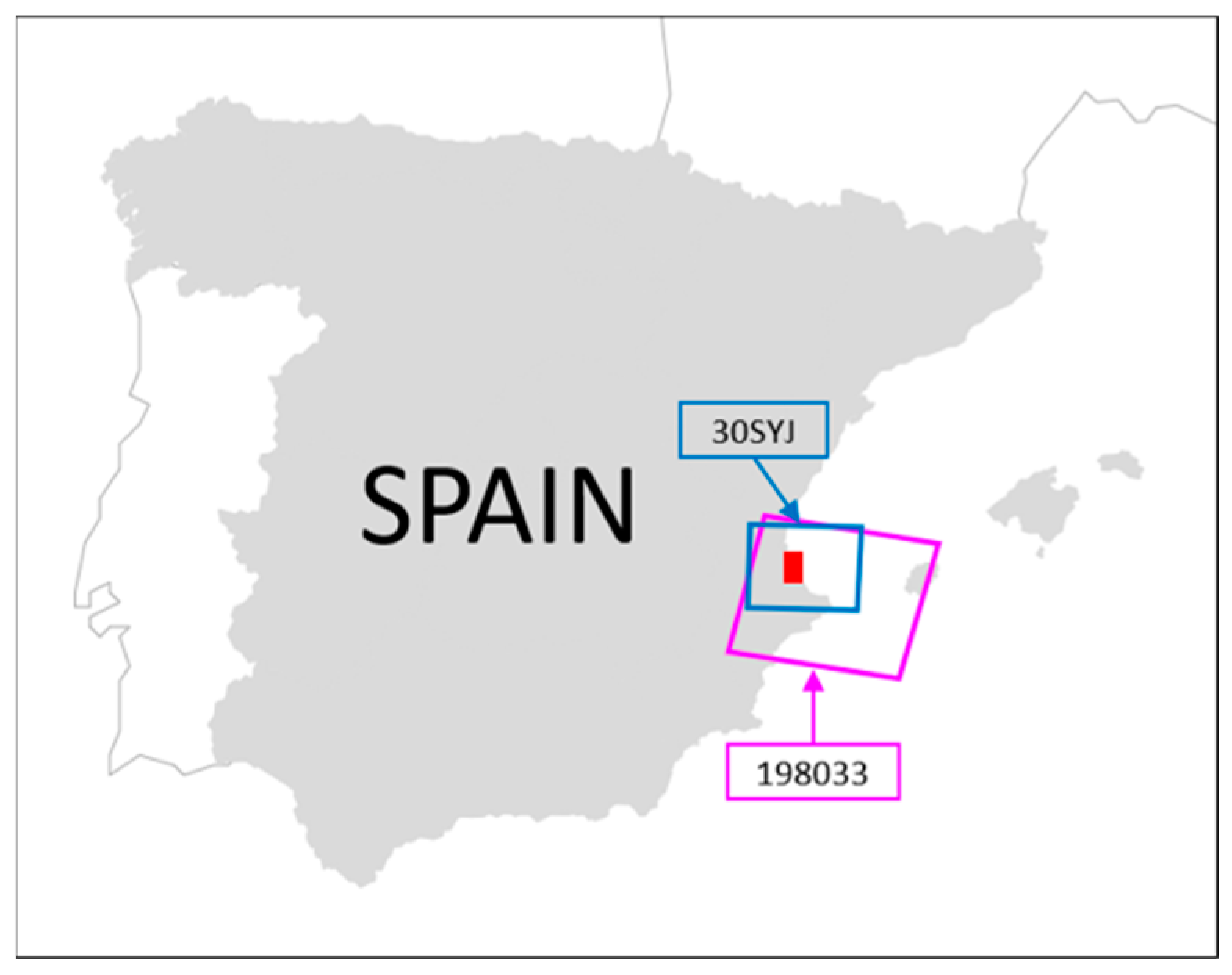
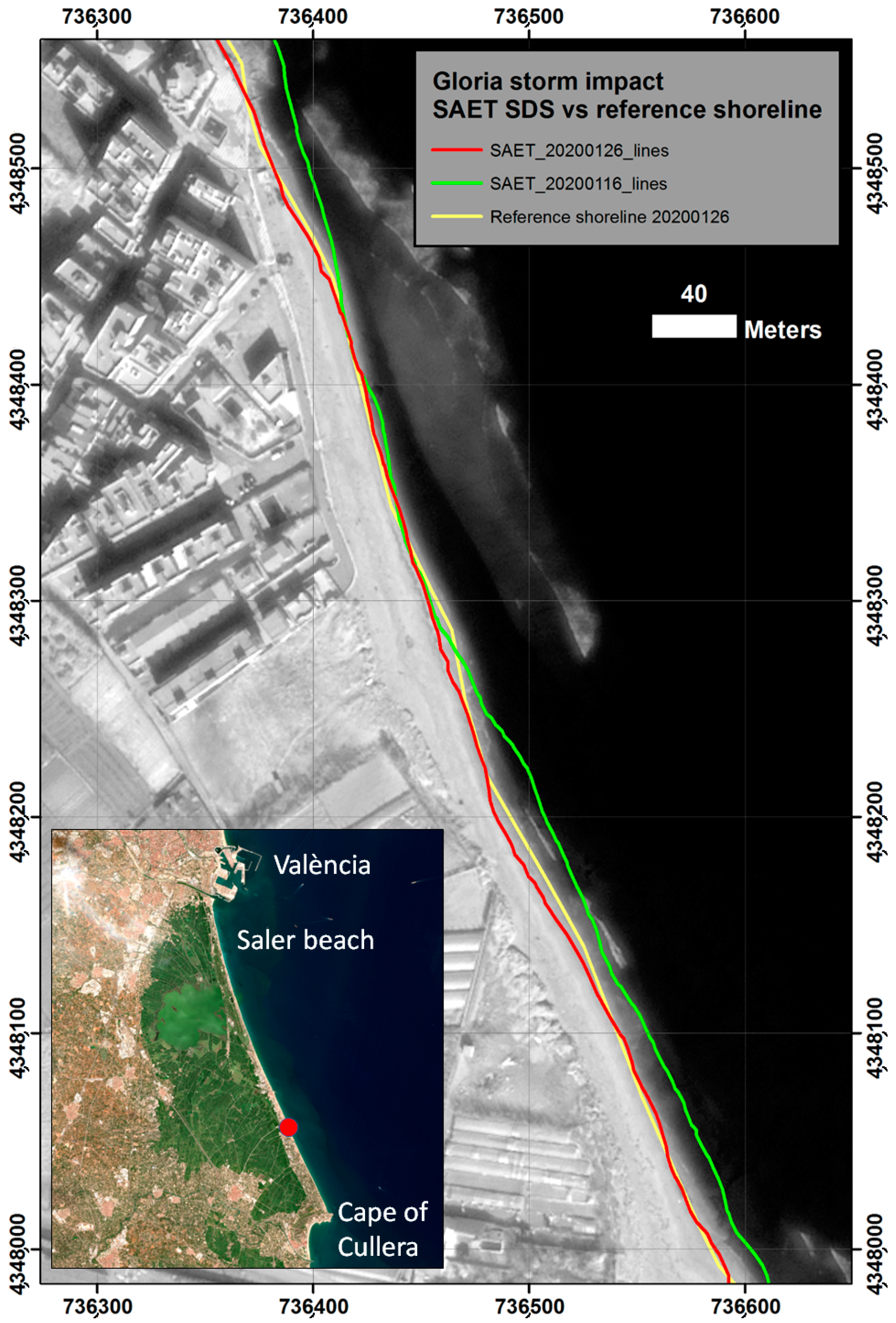
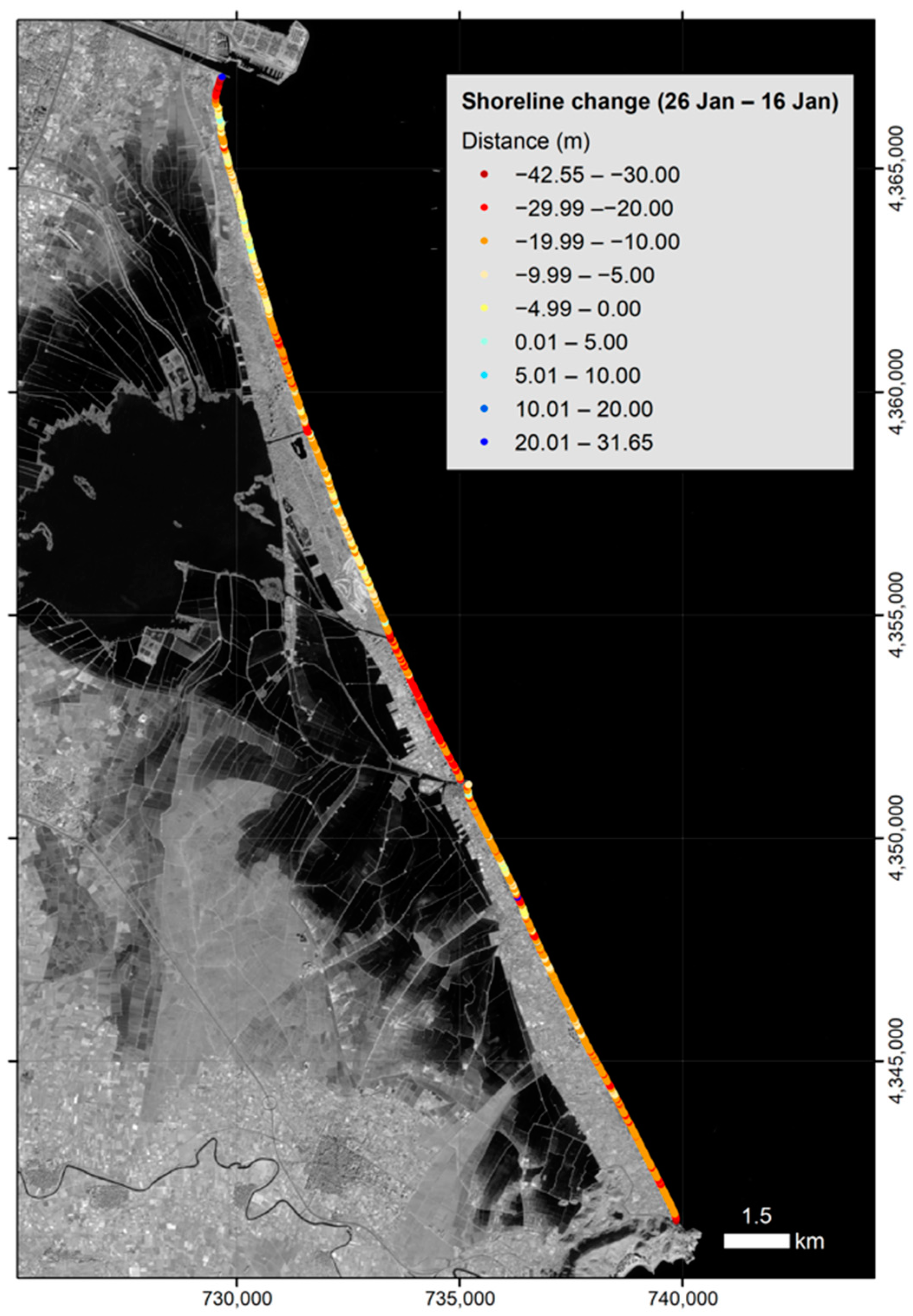
3.2. Application of SAET: Characterising the Shoreline Changes along the Valencian Coast during the Storm Gloria
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- de Schipper, M.A.; Ludka, B.C.; Raubenheimer, B.; Luijendijk, A.P.; Schlacher, T. Beach nourishment has complex implications for the future of sandy shores. Nat. Rev. Earth Environ. 2021, 2, 70–84. [Google Scholar] [CrossRef]
- Castelle, B.; Marieu, V.; Bujan, S. Alongshore-variable beach and dune changes on the timescales from days (storms) to decades along the rip-dominated beaches of the Gironde Coast, SW France. J. Coast. Res. 2019, 88, 157–171. [Google Scholar] [CrossRef]
- IPCC. Intergovernmental Panel on Climate Change Climate Change 2014: Synthesis Report. In Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Meyer, R.K., Pachauri, L.A., Eds.; IPCC: Geneva, Switzerland, 2014; pp. 1–5. [Google Scholar]
- Schlacher, T.A.; Schoeman, D.S.; Dugan, J.; Lastra, M.; Jones, A.; Scapini, F.; McLachlan, A. Sandy beach ecosystems: Key features, sampling issues, management challenges and climate change impacts. Mar. Ecol. 2008, 29, 70–90. [Google Scholar] [CrossRef]
- Calafat, F.M.; Wahl, T.; Tadesse, M.G.; Sparrow, S.N. Trends in Europe storm surge extremes match the rate of sea-level rise. Nature 2022, 603, 841–845. [Google Scholar] [CrossRef]
- Ballesteros, C.; Jiménez, J.A.; Valdemoro, H.I.; Bosom, E. Erosion consequences on beach functions along the Maresme coast (NW Mediterranean, Spain). Nat. Hazards 2018, 90, 173–195. [Google Scholar] [CrossRef]
- Cabezas-Rabadán, C.; Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Rodilla, M. Detecting problematic beach widths for the recreational function along the Gulf of Valencia (Spain) from Landsat 8 subpixel shorelines. Appl. Geogr. 2019, 110, 102047. [Google Scholar] [CrossRef]
- Jiménez, J.A.; Gracia, V.; Valdemoro, H.I.; Mendoza, E.T.; Sánchez-Arcilla, A. Managing erosion-induced problems in NW Mediterranean urban beaches. Ocean. Coast. Manag. 2011, 54, 907–918. [Google Scholar] [CrossRef]
- Cabezas-Rabadán, C.; Pardo-Pascual, J.E.; Palomar-Vázquez, J.; Fernández-Sarría, A. Characterizing beach changes using high-frequency Sentinel-2 derived shorelines on the Valencian coast (Spanish Mediterranean). Sci. Total Environ. 2019, 691, 216–231. [Google Scholar] [CrossRef]
- Melet, A.; Buontempo, C.; Mattiuzzi, M.; Salamon, P.; Bahurel, P.; Breyiannis, G.; Burgess, S.; Crosnier, L.; Le Traon, P.; Mentaschi, L.; et al. European Copernicus Services to Inform on Sea-Level Rise Adaptation: Current Status and Perspectives. Front. Mar. Sci. 2021, 8, 1142. [Google Scholar] [CrossRef]
- Darwish, K.; Smith, S. Landsat-Based Assessment of Morphological Changes along the Sinai Mediterranean Coast between 1990 and 2020. Remote Sens. 2023, 15, 1392. [Google Scholar] [CrossRef]
- Muzirafuti, A.; Crupi, A.; Lanza, S.; Barreca, G.; Randazzo, G. Shallow water bathymetry by satellite image: A case study on the coast of San Vito Lo Capo Peninsula, Northwestern Sicily, Italy. In Proceedings of the IMEKO TC-19 International Workshop on Metrology for the Sea, Genoa, Italy, 3–5 October 2019. [Google Scholar]
- Viaña-Borja, S.P.; Fernández-Mora, A.; Stumpf, R.P.; Navarro, G.; Caballero, I. Semi-automated bathymetry using Sentinel-2 for coastal monitoring in the Western Mediterranean. Int. J. Appl. Earth Obs. Geoinf. 2023, 120, 103328. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A global analysis of Sentinel-2A, Sentinel-2B and Landsat 8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef]
- Coco, G.; Senechal, N.; Rejas, A.; Bryan, K.R.; Capo, S.; Parisot, J.P.; Brown, J.A.; MacMahan, J.H. Beach response to a sequence of extreme storms. Geomorphology 2014, 204, 493–501. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Sagar, S.; Lymburner, L.; Alam, I.; Sixsmith, J. Sub-pixel waterline extraction: Characterising accuracy and sensitivity to indices and spectra. Remote Sens. 2019, 11, 2984. [Google Scholar] [CrossRef]
- Chen, W.W.; Chang, H.K. Estimation of shoreline position and change from satellite images considering tidal variation. Estuarine. Coast. Shelf Sci. 2009, 84, 54–60. [Google Scholar] [CrossRef]
- Foody, G.M.; Muslim, A.M.; Atkinson, P.M. Super-resolution mapping of the waterline from remotely sensed data. Int. J. Remote Sens. 2005, 26, 5381–5392. [Google Scholar] [CrossRef]
- Gens, R. Remote sensing of coastlines: Detection, extraction and monitoring. Int. J. Remote Sens. 2010, 31, 1819–1836. [Google Scholar] [CrossRef]
- Ghosh, M.K.; Kumar, L.; Roy, C. Monitoring the coastline change of Hatiya Island in Bangladesh using remote sensing techniques. ISPRS J. Photogramm. Remote Sens. 2015, 101, 137–144. [Google Scholar] [CrossRef]
- Luijendijk, A.; Hagenaars, G.; Ranasinghe, R.; Baart, F.; Donchyts, G.; Aarninkhof, S. The State of the World’s Beaches. Sci. Rep. 2018, 8, 6641. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, J.; Ma, Y. Coastline interpretation from multispectral remote sensing images using an association rule algorithm. Int. J. Remote Sens. 2010, 31, 6409–6423. [Google Scholar] [CrossRef]
- Castelle, B.; Masselink, G.; Scott, T.; Stokes, C.; Konstantinou, A.; Marieu, V.; Bujan, S. Satellite-derived shoreline detection at a high-energy meso-macrotidal beach. Geomorphology 2021, 383, 107707. [Google Scholar] [CrossRef]
- Almeida, L.P.; de Oliveira, I.E.; Lyra, R.; Dazzi RL, S.; Martins, V.G.; da Fontoura Klein, A.H. Coastal analyst system from space imagery engine (CASSIE): Shoreline management module. Environ. Model. Softw. 2021, 140, 105033. [Google Scholar] [CrossRef]
- Cabezas-Rabadán, C.; Pardo-Pascual, J.E.; Palomar-Vázquez, J. Characterizing the Relationship between the Sediment Grain Size and the Shoreline Variability Defined from Sentinel-2 Derived Shorelines. Remote Sens. 2021, 13, 2829. [Google Scholar] [CrossRef]
- Sánchez-García, E.; Palomar-Vázquez, J.M.; Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Cabezas-Rabadán, C.; Gómez-Pujol, L. An efficient protocol for accurate and massive shoreline definition from mid-resolution satellite imagery. Coast. Eng. 2020, 160, 103732. [Google Scholar] [CrossRef]
- Vos, K.; Splinter, K.D.; Harley, M.D.; Simmons, J.A.; Turner, I.L. CoastSat: A Google Earth Engine-enabled Python toolkit to extract shorelines from publicly available satellite imagery. Environ. Model. Softw. 2019, 122, 104528. [Google Scholar] [CrossRef]
- Hagenaars, G.; de Vries, S.; Luijendijk, A.P.; de Boer, W.P.; Reniers, A.J. On the accuracy of automated shoreline detection derived from satellite imagery: A case study of the sand motor mega-scale nourishment. Coast. Eng. 2018, 133, 113–125. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Sánchez-García, E.; Almonacid-Caballer, J.; Palomar-Vázquez, J.M.; Priego De Los Santos, E.; Fernández-Sarría, A.; Balaguer-Beser, Á. Assessing the accuracy of automatically extracted shorelines on microtidal beaches from Landsat 7, Landsat 8 and Sentinel-2 imagery. Remote Sens. 2018, 10, 326. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histogram. IEEE Trans. Syst. Man Cybemetic 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Cipolletti, M.P.; Delrieux, C.A.; Perillo, G.M.; Piccolo, M.C. Superresolution border segmentation and measurement in remote sensing images. Comput. Geosci. 2012, 40, 87–96. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. ACM Siggr. Comput. Graph. 1987, 21, 163–169. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Ruiz, L.A.; Palomar-Vázquez, J. Automatic extraction of shorelines from Landsat TM and ETM+ multi-temporal images with subpixel precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Irazoqui-Apecechea, M.; Melet, A.; Armaroli, C. Towards a pan-European coastal flood awareness system: Skill of extreme sea-level forecasts from the Copernicus Marine Service. Front. Mar. Sci. 2023, 9, 1091844. [Google Scholar] [CrossRef]
- Almonacid-Caballer, J.; Pardo-Pascual, J.E.; Ruiz, L.A. Evaluating fourier cross-correlation sub-pixel registration in landsat images. Remote Sens. 2017, 9, 1051. [Google Scholar] [CrossRef]
- CLMS. Copernicus Land Monitoring Service. European Coastal Zone. 2018. Available online: https://land.copernicus.eu/local/coastal-zones/coastal-zones-2018 (accessed on 1 September 2022).
- Liao, P.-S.; Chen, T.-S.; Chung, P.-C. A fast algorithm for multilevel thresholding. J. Inf. Sci. Eng. 2001, 17, 713–727. [Google Scholar] [CrossRef]
- REDMAR—Red de Mareógrafos de Puertos del Estado. Resumen de los Parámetros Relacionados Con el Nivel del Mar y la Marea que Afectan a las Condiciones de Diseño y Explotación Portuaria. Puerto de Valencia. Dirección Técnica Puertos del Estado. 2019. Available online: https://bancodatos.puertos.es/BD/informes/globales/GLOB_2_3_3651.pdf (accessed on 29 September 2022).
- Pardo-Pascual, J.E.; Palomar-Vázquez, J.; Cabezas-Rabadán, C. Estudio de los cambios de posición de la línea de costa en las playas del segmento València-Cullera (1984–2020) a partir de imágenes de satélite de resolución media de libre acceso. Cuad. De Geogr. 2022, 108, 79–104. [Google Scholar] [CrossRef]
- Amores, A.; Marcos, M.; Carrió, D.S.; Gómez-Pujol, L. Coastal impacts of Storm Gloria (January 2020) over the north-western Mediterranean. Nat. Hazards Earth Syst. Sci. 2020, 20, 1955–1968. [Google Scholar] [CrossRef]
- Berdalet, E.; Marrasé, C.; Pelegrí, J.L. Resumen sobre la Formación y Consecuencias de la Borrasca Gloria (19–24 Enero 2020); CSIC—Instituto de Ciencias del Mar (ICM): Barcelona, Spain, 2020. [Google Scholar] [CrossRef]
- de Alfonso, M.; Lin-Ye, J.; García-Valdecasas, J.M.; Pérez-Rubio, S.; Luna, M.Y.; Santos-Muñoz, D.; Ruiz, M.I.; Pérez-Gómez, B.; Álvarez-Fanjul, E. Storm Gloria: Sea state evolution based on in situ measurements and modeled data and its impact on extreme values. Front. Mar. Sci. 2021, 8, 270. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Nanson, R.; Sagar, S.; Lymburner, L. Mapping Australia’s dynamic coastline at mean sea level using three decades of Landsat imagery. Remote Sens. Environ. 2021, 267, 112734. [Google Scholar] [CrossRef]
- Vos, K.; Harley, M.D.; Splinter, K.D.; Simmons, J.A.; Turner, I.L. Sub-annual to multi-decadal shoreline variability from publicly available satellite imagery. Coast. Eng. 2019, 150, 160–174. [Google Scholar] [CrossRef]
- Cabezas-Rabadan, C.; Pardo-Pascual, J.E.; Palomar-Vazquez, J.; Ferreira, O.; Costas, S. Satellite derived shorelines at an exposed meso-tidal beach. J. Coast. Res. 2020, 95, 1027–1031. [Google Scholar] [CrossRef]
- Sánchez-García, E.; Briceño, I.; Palomar-Vázquez, J.; Pardo-Pascual, J.E.; Cabezas-Rabadán, C.; Balaguer-Beser, Á. Beach monitoring project on central Chile. In Proceedings of the 5ª Conferência sobre Morfodinâmica Estuarina e Costeira (MEC2019), Lisboa, Portugal, 24–26 May 2019; pp. 49–50. [Google Scholar]
- Splinter, K.D.; Coco, G. Challenges and Opportunities in Coastal Shoreline Prediction. Front. Mar. Sci. 2021, 8. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Type | Description |
|---|---|---|
| rm | Running mode | Run mode ‘os’ (only searching) is used to search images, ‘dp’ for downloading and processing images, ‘od’ for downloading images without processing, and ‘op’ for processing or re-processing previous downloaded images using different advanced parameters. |
| fp (footprint) | Filter | ROI for scene searching. This parameter has three ways to be used: -Path to the ROI file (in.json format). -Bounding box in latitude and longitude coordinates. -The value NONE for this parameter will deactivate the spatial filter and the user will be able to activate the filter by scenes (parameters--ll and-sl). |
| sd (start date) | Filter | Start date for searching scenes. |
| cd (central date) | Filter | Central date for searching the scenes. It is assumed to be the central date of the storm. |
| ed (end date) | Filter | End date for searching scenes. |
| mc (maxim cloud coverage) | Filter | Maximum percentage of cloud coverage in the scene. |
| lp (Landsat products) | Filter | Product type for L8-9 scenes. By default, SAET uses the Collection 1 to search L8 images, but it also can search L8-9 from Collection 2 at levels 1 and 2. |
| ll (list of Landsat scenes) | Filter | Scene list identifiers for Landsat images. This parameter is used only if the spatial filter by ROI is deactivated. |
| sp (Sentinel-2 product) | Filter | Product type for S2 tiles. By default, SAET uses Sentinel-2 at level 1C, but the user also can search images of level 2A. |
| sl (list of Sentinel-2 tiles) | Filter | Scene list identifiers for S2. This parameter is used only if the spatial filter by ROI is deactivated. |
| of (output folder) | Advanced | Output data folder. By default, this folder will be located in the SAET installation folder but can be defined by the user |
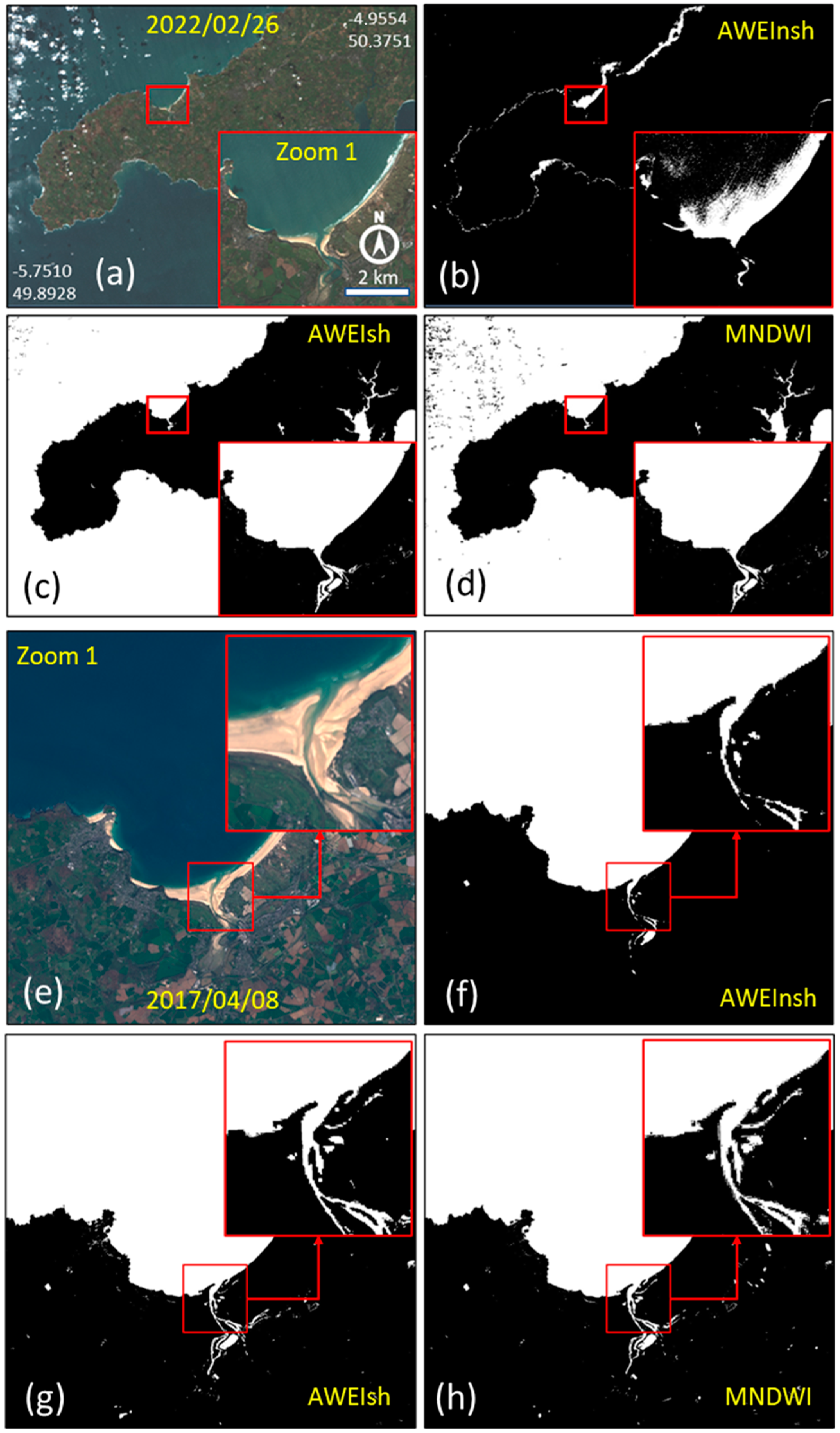
| wi (water index) | Advanced | Water index type. SAET supports the indices AWEINSH, AWEISH and MNDWI. |
| th (thresholding/segmentation method) | Advanced | Threshold method to obtain the water-land mask from the water index. SAET supports four methods: standard 0 value, Otsu bimodal, and Otsu multimodal with three classes and the clustering method k-means (only to SWIR band). |
| mm (morphological method) | Advanced | Morphological method. Used to obtain the shoreline at pixel level from the water-land mask. SAET can apply two methods: erosion and dilation. |
| cl (cloud masking severity) | Advanced | Cloud masking severity. This parameter controls the type of clouds considered to refine the initial water-land mask. Three levels may be defined: low (SAET does not use any cloud mask Value 0), medium (only opaque clouds are used. Value 1), and high (opaque clouds, cirrus, and cloud shadows are used. Value 2). |
| ks (kernel size) | Advanced | Kernel size. Advanced users can control the size of the kernel analysed when the subpixel extraction takes place, choosing between 3 and 5 pixels. |
| np (number of products) | Filter | The number of products (identifiers). List of products to be processed in both ‘dp’ and ‘op’ modes. This list makes reference to the products found by SAET in the searching mode. This parameter supports three different formats: list of identifiers, range of identifiers, or all identifiers. |
| Mode | Command-Line Sentence | Description |
|---|---|---|
| Only searching | saet_run.py --rm=os --fp=NONE --sd=20220801 --cd=20220815 --ed=20220830 --mc=10 --lp=NONE --ll=NONE --sp=S2MSI1C --sl=30SYJ | Searching for Sentinel-2 (level 1C) images from 1 August to 30 August 2020, belonging to the tile ‘30SYJ’ and with a cloud coverage of less than 10% |
| Downloading and processing | saet_run.py --rm=dp --fp=NONE --sd=20220801 --cd=20220815 --ed=20220830 --mc=10 --lp=NONE --ll=NONE --sp=S2MSI1C --sl=30SYJ --np=3,4,6,8 | Downloading and processing Sentinel-2 (level 1C) images from 1 August to 30 August 2020, belonging to the tile ‘30 SYJ’ and with a cloud coverage of less than 10%. The ‘np’ parameter indicates which images, from the list of found images, will be processed (in this case, images 3, 4, 6, and 8). |
| Only processing | saet_run.py --rm=op --wi=aweish --cl=2 | Processing of the images stored in the data folder, using different values to the default values for some advanced parameters: water index (--wi. Default value: ‘aweinsh’) and cloud masking severity (--cl. Default value: 0 (without mask)). |
| Water Index | Expression |
|---|---|
| AWEInsh | |
| AWEIsh | |
| MNDWI |
| Image Type | Image Level of Processing | Band | Resolution (m) | Description |
|---|---|---|---|---|
| S2 | 1C (TOA) | QA60 | 60 | Classification: opaque clouds, cirrus, and no clouds. Source: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-2-msi/level-1c/cloud-masks (accessed on 1 June 2023) |
| S2 | 2A (SR) | SCL | 20 | Classification: low, medium, or high cloud probability; presence of cirrus; cloud shadows. Source: https://sentinels.copernicus.eu/web/sentinel/technical-guides/sentinel-2-msi/level-2a/algorithm-overview (accessed on 18 June 2023) |
| L8–9 | 1 (TOA) and 2 (SR) | QA_PIXEL | 30 | Classification: based on levels of confidence (low, medium, high) for clouds, cirrus, and cloud shadows. Source: https://www.usgs.gov/landsat-missions/landsat-collection-2-quality-assessment-bands (accessed on accessed on 1 June 2023) |
| Date (dd/mm/yy) | Satellite Image | Reference Data | Sea Level (m) | Hs (m) | Tp (s) | No. Data | Bias (m) | Standard Deviation (m) | RMSE (m) |
|---|---|---|---|---|---|---|---|---|---|
| 26 January 2020 | S2 | Pléiades | 0.220 | 0.52 | 8.27 | 5038 | 0.03 | 3.79 | 3.79 |
| 10 July 2018 | L8 | DGNSS | 0.096 | 0.12 | 5.13 | 1367 | 0.12 | 2.62 | 2.62 |
| 7 May 2018 | L8 | DGNSS | 0.085 | 0.22 | 5.56 | 384 | −1.02 | 3.61 | 3.75 |
| 14 September 2015 | S2 | DGNSS | 0.175 | 0.32 | 2.43 | 885 | −0.11 | 2.75 | 2.75 |
| SAET Mode | Command Line | Description |
|---|---|---|
| Only searching | saet_run.py --rm=os --fp=NONE --sd=20200110 --cd=20200120 --ed=20200130 --mc=10 --lp=NONE --ll=NONE --sp=S2MSI1C --sl=30SYJ | Searching for level 1C Sentinel-2 images belonging to the tile ‘30SYJ’, with a cloud cover of less than 10%, and that was acquired between 10 January and 30 January 2020. |
| Downloading and processing | saet_run.py --rm=dp --fp=NONE --sd=20200110 --cd=20200120 --ed=20200130 --mc=10 --lp=NONE --ll=NONE --sp=S2MSI1C --sl=30SYJ --np=0,1 | Downloading and processing images [0] and [1]. These images correspond with the position of each selected image in the list obtained when running SAET in the ‘only searching’ mode. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palomar-Vázquez, J.; Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Cabezas-Rabadán, C. Shoreline Analysis and Extraction Tool (SAET): A New Tool for the Automatic Extraction of Satellite-Derived Shorelines with Subpixel Accuracy. Remote Sens. 2023, 15, 3198. https://doi.org/10.3390/rs15123198
Palomar-Vázquez J, Pardo-Pascual JE, Almonacid-Caballer J, Cabezas-Rabadán C. Shoreline Analysis and Extraction Tool (SAET): A New Tool for the Automatic Extraction of Satellite-Derived Shorelines with Subpixel Accuracy. Remote Sensing. 2023; 15(12):3198. https://doi.org/10.3390/rs15123198
Chicago/Turabian StylePalomar-Vázquez, Jesús, Josep E. Pardo-Pascual, Jaime Almonacid-Caballer, and Carlos Cabezas-Rabadán. 2023. "Shoreline Analysis and Extraction Tool (SAET): A New Tool for the Automatic Extraction of Satellite-Derived Shorelines with Subpixel Accuracy" Remote Sensing 15, no. 12: 3198. https://doi.org/10.3390/rs15123198
APA StylePalomar-Vázquez, J., Pardo-Pascual, J. E., Almonacid-Caballer, J., & Cabezas-Rabadán, C. (2023). Shoreline Analysis and Extraction Tool (SAET): A New Tool for the Automatic Extraction of Satellite-Derived Shorelines with Subpixel Accuracy. Remote Sensing, 15(12), 3198. https://doi.org/10.3390/rs15123198