

Method of Development of a New Regional Ionosphere Model (RIM) to Improve Static Single-Frequency Precise Point Positioning (SF-PPP) for Egypt Using Bernese GNSS Software



Abstract
1. Introduction
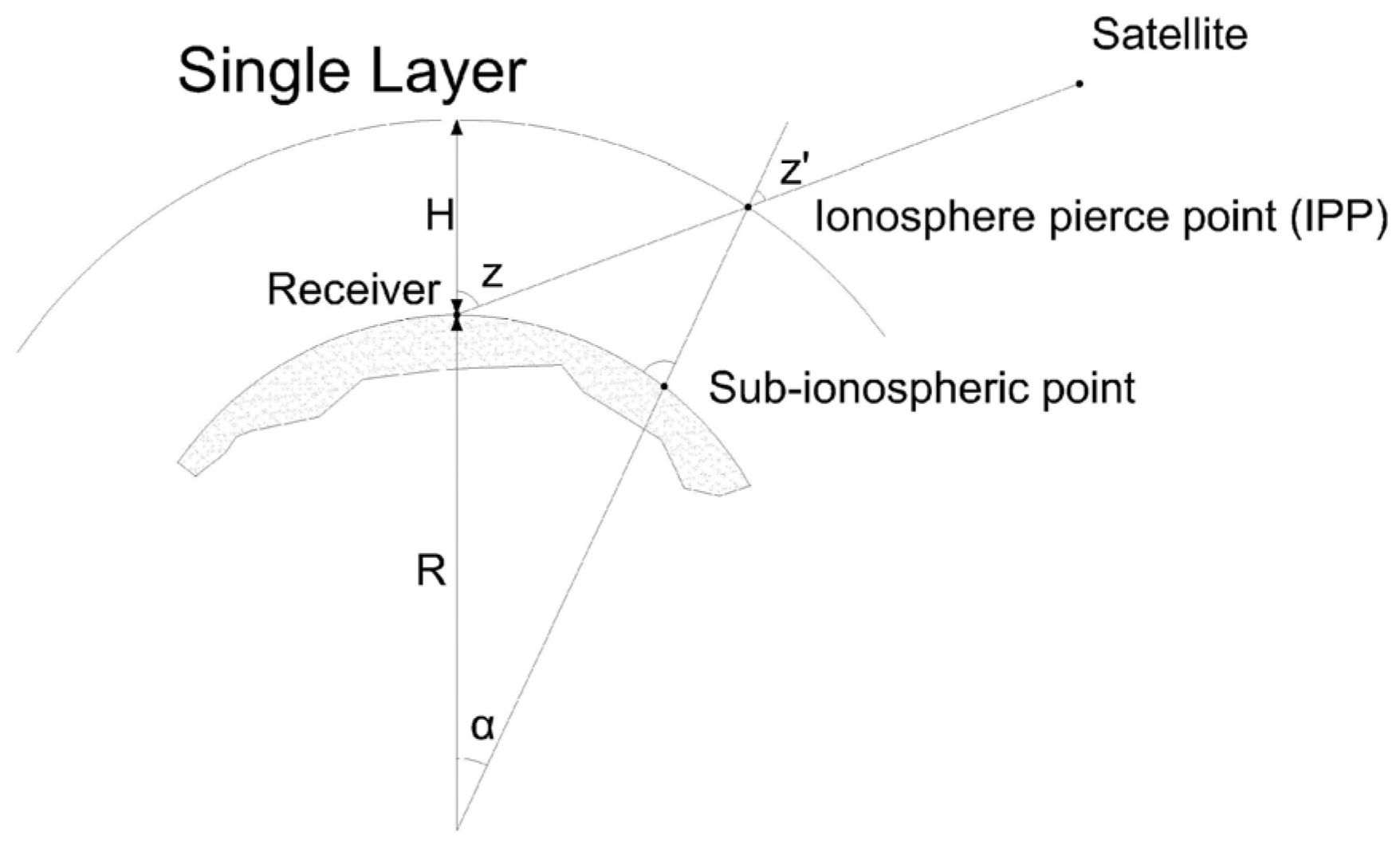
2. Ionosphere Modeling
3. Regional Ionosphere Modelling Using Bernese GNSS Software V. 5.2
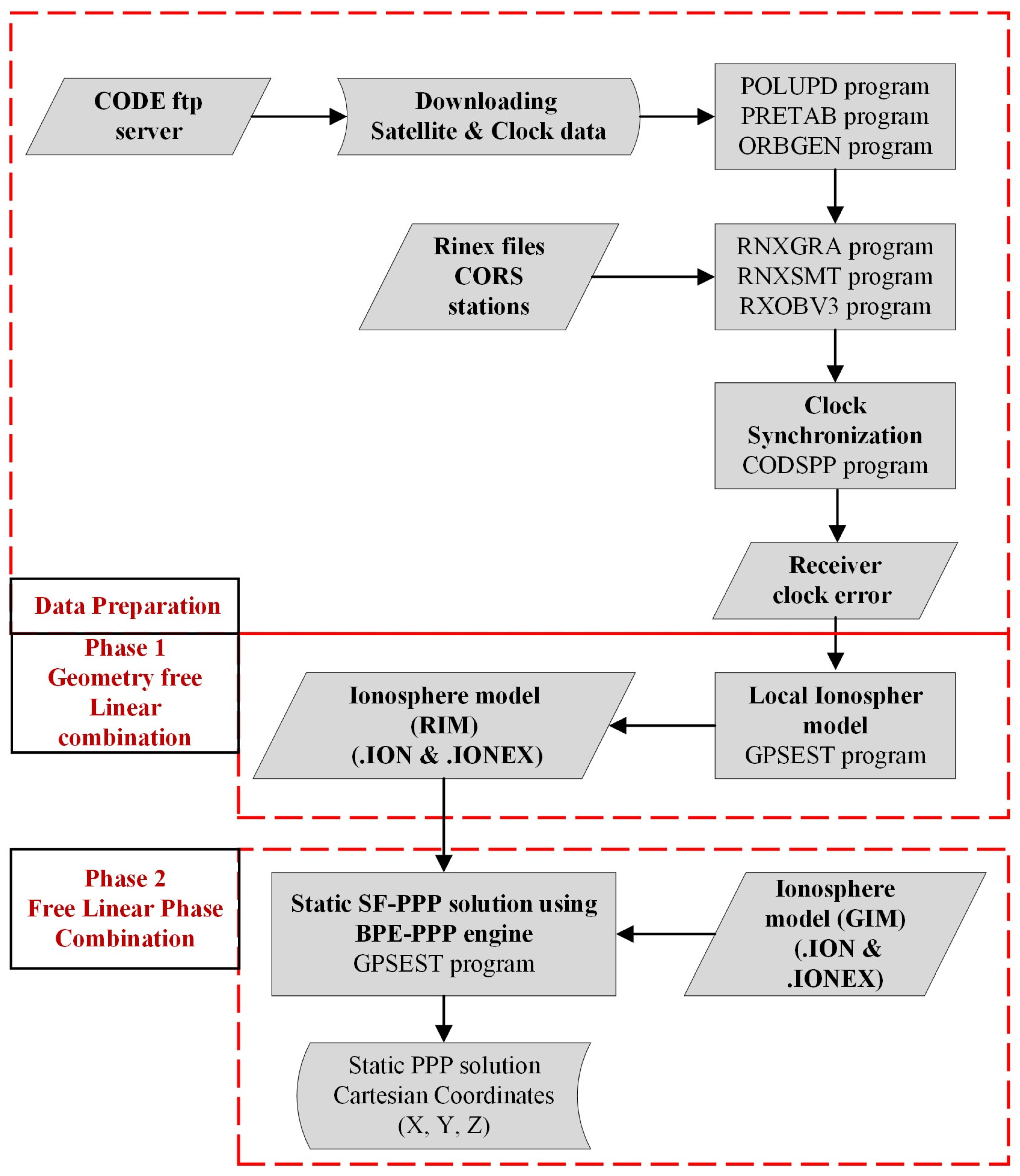
3.1. Data Preparations
- POLUPD program: to convert the earth pole information file to internal Bernese software format.
- PRETAB program: to tabulate information about satellite orbit and atomic clocks.
- ORBGEN program: to obtain standard orbit format.
- RNXGRA program: to check the quality of Rinex data.
- RNXSMT program: to remove cycle slips and outliers from phase and code files.
- RXOBV3 program: converts the Rinex data that has been smoothed into Bernese binary format.
- CODSPP program: to calculate the receiver clock error based on the code combination using least-squares adjustment theory. The estimated is afterwards added as a known value into the final coordinate’s estimation for static or kinematic; the mathematical model is explained in detail in [34].
3.2. Phase 1 [Geometry-Free Linear Combination (RIM Modelling)]
3.3. Phase 2 [SF-PPP Solution]
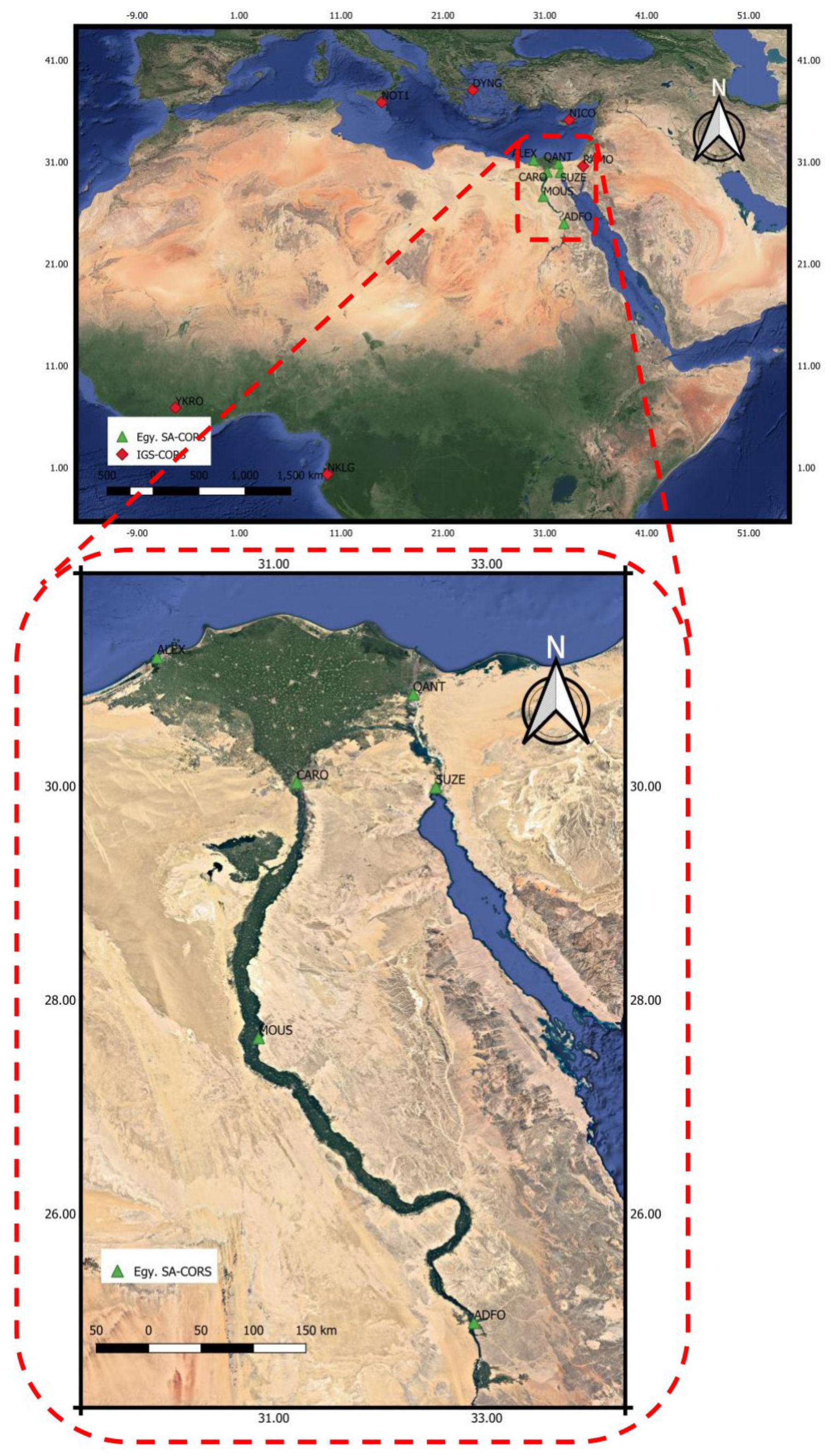
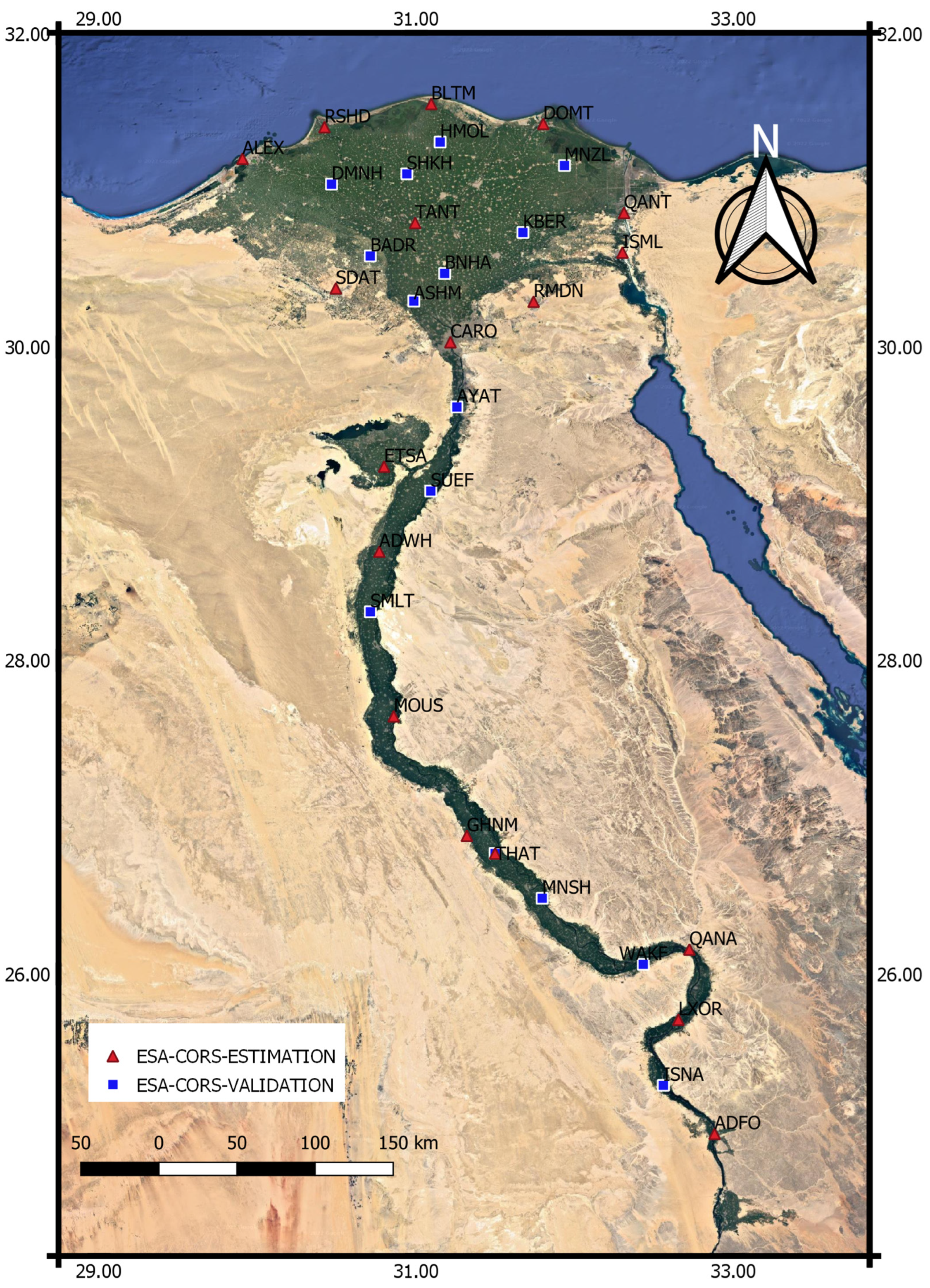
4. Evaluation Process
5. Results
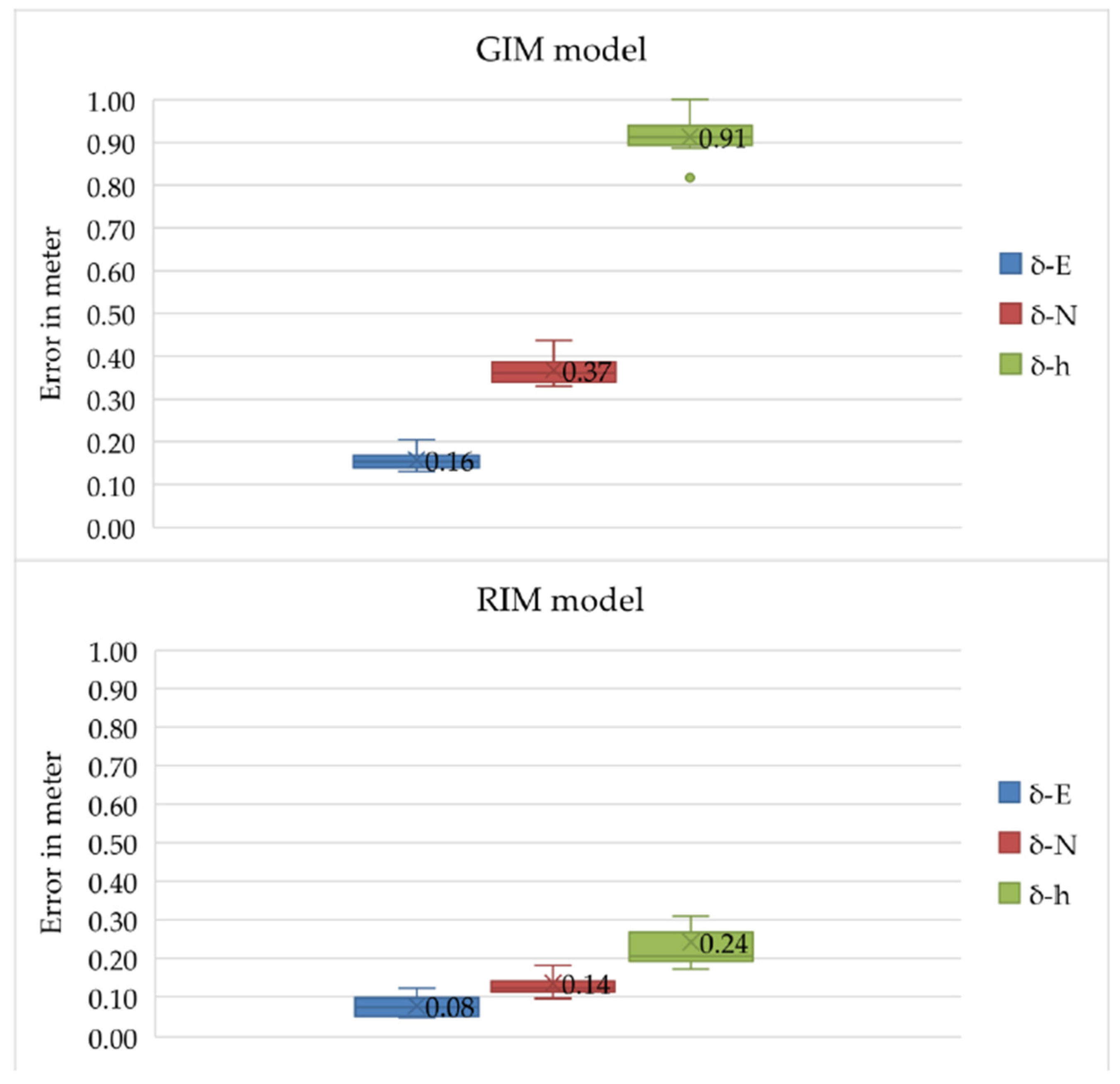
5.1. Statistical Analysis
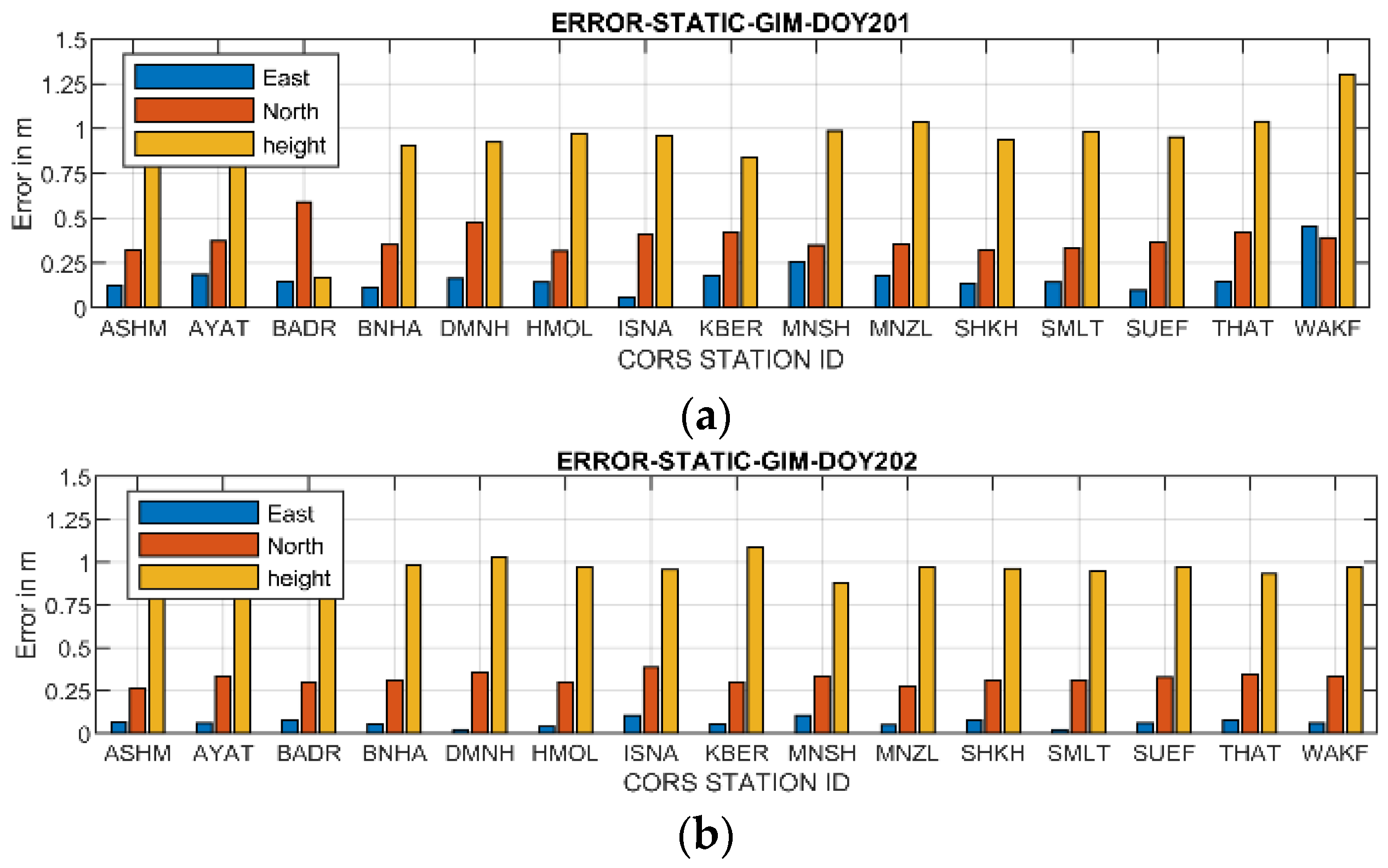
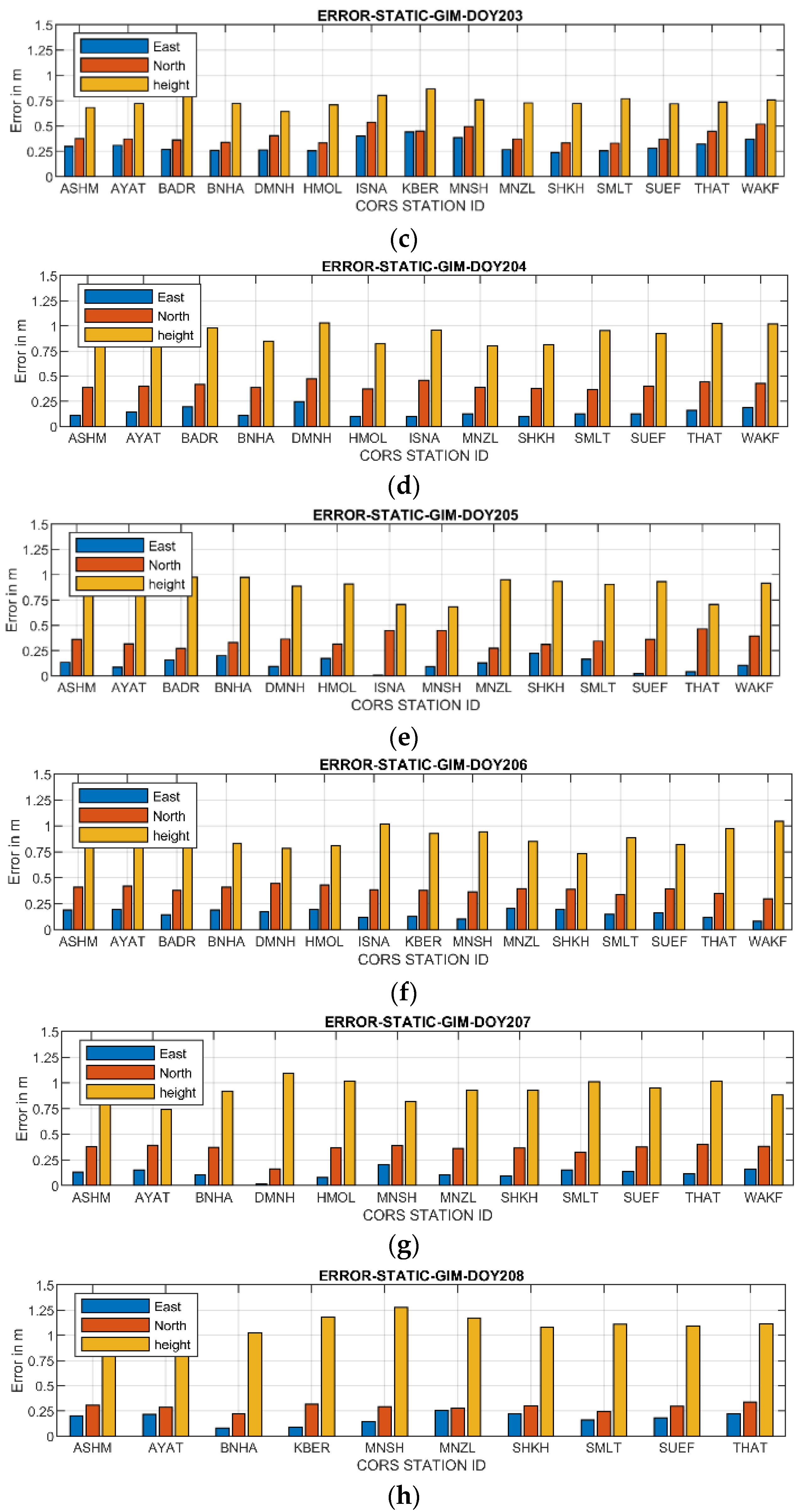
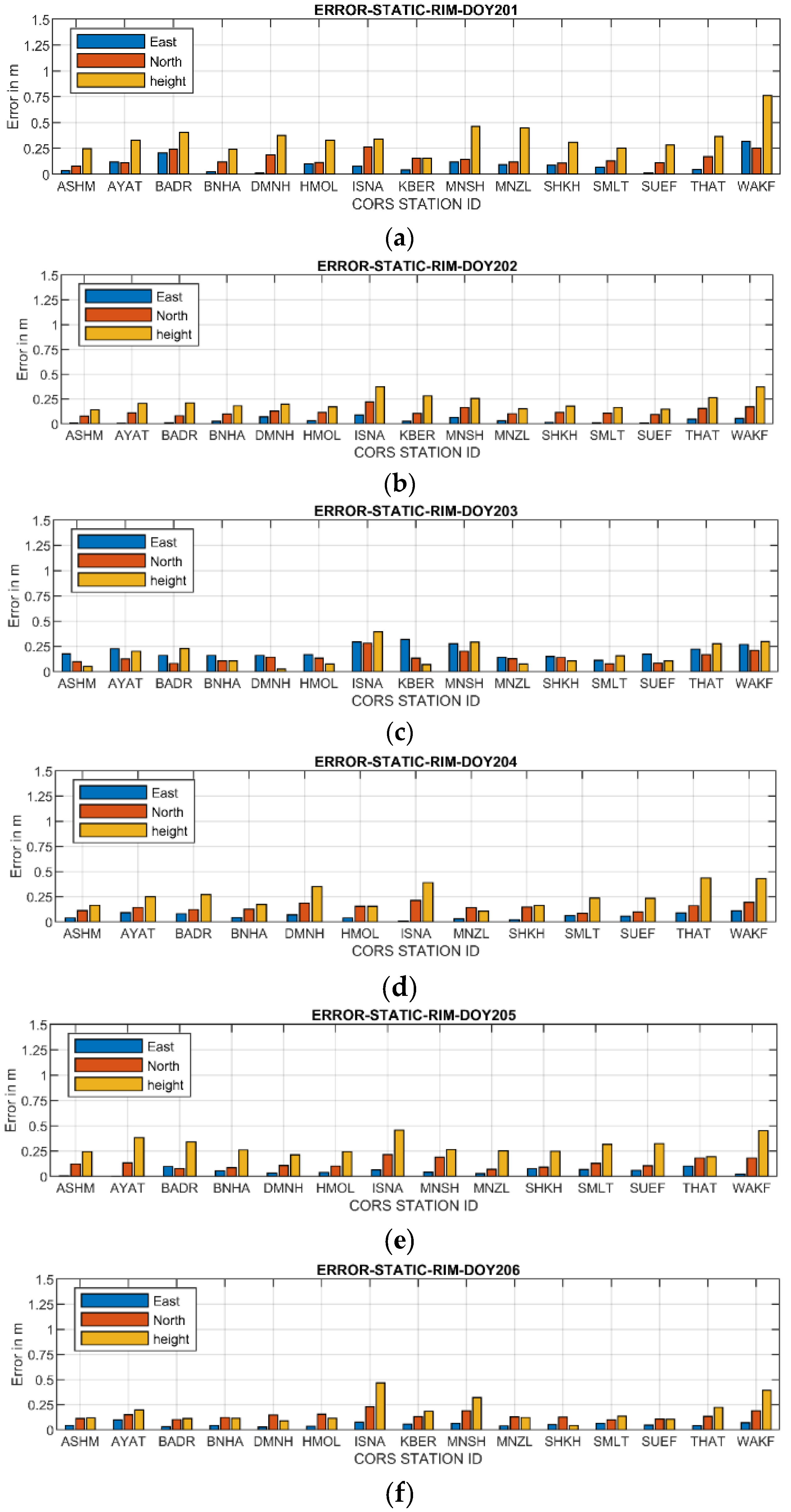
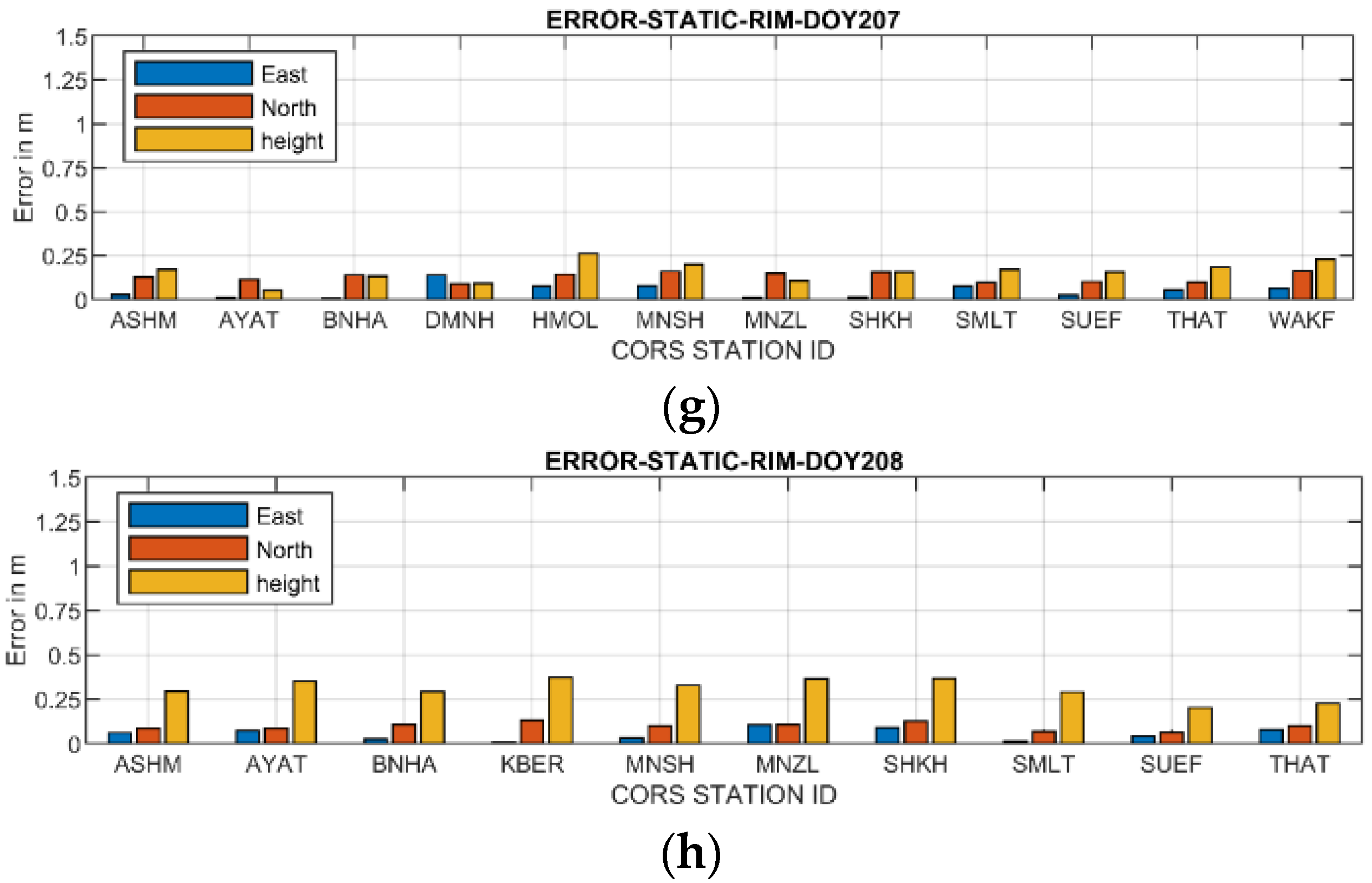
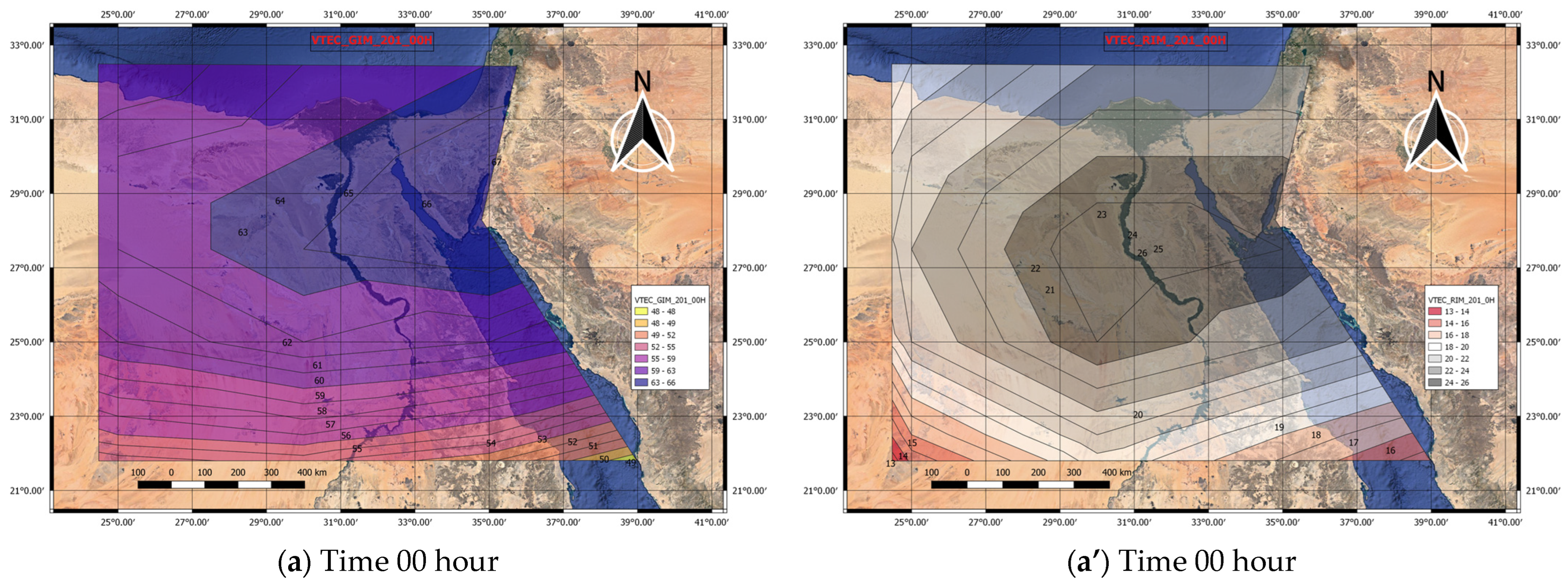
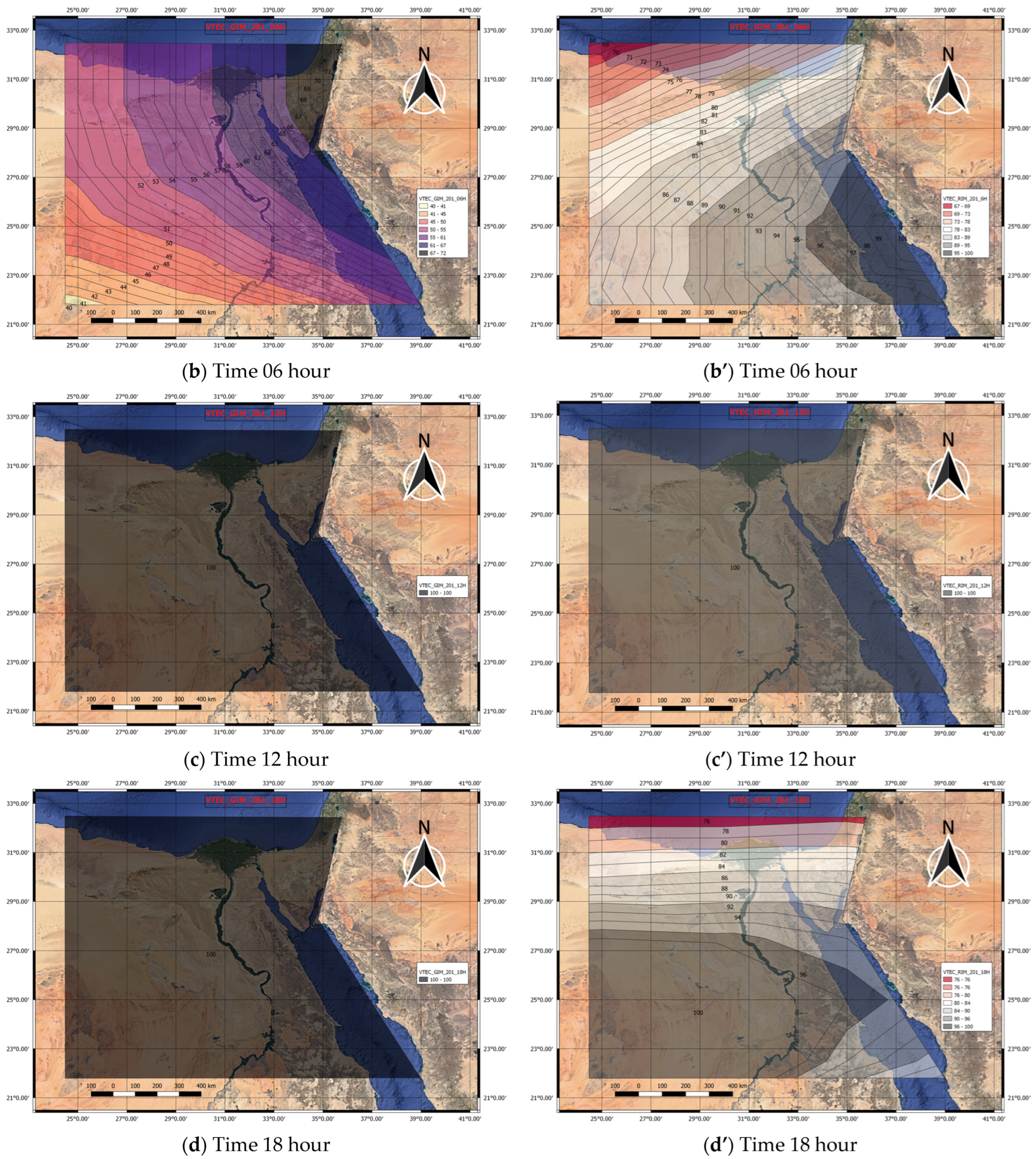
5.2. Graphical Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seeber, G. Satellite Geodesy, 2nd ed.; Walter de Gruyter: Berlin, Germany, 2003. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jumana Press: Lincoln, MA, USA, 2012. [Google Scholar]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 3, 325–331. [Google Scholar] [CrossRef]
- Schaer, S.; Gurtner, W.; Feltens, J. IONEX: The ionosphere map exchange format version 1. In Proceedings of the IGS AC Workshop, Darmstadt, Germany, 9–11 February 1998. [Google Scholar]
- IONEX. Ionosphere Products. Available online: https://cddis.nasa.gov/archive/gnss/products/ionex/yyyy/ddd (accessed on 20 April 2023).
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.C.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Bilitza, D.; Rawer, K.; Bossy, L.; Gulyaeva, T. International reference ionosphere—Past, present, and future: I. Electron density. Adv. Space Res. 1993, 13, 3–13. [Google Scholar] [CrossRef]
- Radicella, S.M.; Zhang, M.-L. The improved DGR analytical model of electron density height profile and total electron content in the ionosphere. Ann. Geophys. 1995, 1, 35–41. [Google Scholar] [CrossRef]
- Hochegger, G.; Nava, B.; Radicella, S.; Leitinger, R. A family of ionospheric models for different uses. Phys. Chem. Earth Part C Sol. Terr. Planet. Sci. 2000, 25, 307–310. [Google Scholar] [CrossRef]
- Radicella, S.M. The NeQuick model genesis, uses and evolution. Ann. Geophys. 2009, 52, 417–422. [Google Scholar]
- Bhuyan, P.; Borah, R.R. TEC derived from GPS network in India and comparison with the IRI. Adv. Space Res. 2007, 39, 830–840. [Google Scholar] [CrossRef]
- Opperman, B.D.; Cilliers, P.J.; McKinnell, L.A.; Haggard, R. Development of a regional GPS-based ionospheric TEC model for South Africa. Adv. Space Res. 2007, 39, 808–815. [Google Scholar] [CrossRef]
- Başçiftçi, F.; Cevat, I.N.A.L.; Yildirim, O.; Bulbul, S. Comparison of regional and global TEC values: Turkey model. Int. J. Eng. Geosci. 2018, 3, 61–72. [Google Scholar] [CrossRef]
- Tu, R.; Zhang, H.; Ge, M.; Huang, G. A real-time ionospheric model based on GNSS Precise Point Positioning. Adv. Space Res. 2013, 52, 1125–1134. [Google Scholar] [CrossRef]
- Durmaz, M.; Karslioglu, M.O. Regional vertical total electron content (VTEC) modeling together with satellite and receiver differential code biases (DCBs) using semi-parametric multivariate adaptive regression B-splines (SP-BMARS). J. Geod. 2015, 89, 347–360. [Google Scholar] [CrossRef]
- Hoque, M.; Jakowski, N. An alternative ionospheric correction model for global navigation satellite systems. J. Geod. 2015, 89, 391–406. [Google Scholar]
- Kao, S.P.; Chen, Y.C.; Ning, F.S.; Tu, Y.M. An LS-MARS method for modeling regional 3D ionospheric electron density based on GPS data and IRI. Adv. Space Res. 2015, 55, 2256–2267. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; Gonzalez-Casado, G. A worldwide ionospheric model for fast precise point positioning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4596–4604. [Google Scholar] [CrossRef]
- Xi, G.; Zhu, F.; Gan, Y.; Jin, B. Research on the regional short-term ionospheric delay modeling and forecasting methodology for mid-latitude area. GPS Solut. 2015, 19, 457–465. [Google Scholar] [CrossRef]
- Abdelazeem, M.; Çelik, R.N.; El-Rabbany, A. An improved regional ionospheric model for single-frequency GNSS users. Surv. Rev. 2017, 49, 153–159. [Google Scholar]
- Abdelazeem, M.; Çelik, R.N.; El-Rabbany, A. An enhanced real-time regional ionospheric model using IGS real-time service (IGS-RTS) products. J. Navig. 2016, 69, 521–530. [Google Scholar] [CrossRef]
- Dach, R.; Schaer, S.; Arnold, D.; Orliac, E.; Prange, L.; Susnik, A.; Villiger, A.; Jäggi, A. CODE Final Product Series for the IGS. 2016. Available online: https://boris.unibe.ch/75876/1/AIUB_AFTP.TXT (accessed on 27 April 2023).
- Li, M.; Lei, Z.; Li, W.; Jiang, K.; Huang, T.; Zheng, J.; Zhao, Q. Performance Evaluation of Single-Frequency Precise Point Positioning and Its Use in the Android Smartphone. Remote Sens. 2021, 13, 4894. [Google Scholar] [CrossRef]
- Li, W.; Yuan, K.; Odolinski, R.; Zhang, S. Regional Ionospheric Maps with Quad-Constellation Raw Observations as Applied to Single-Frequency PPP. Remote Sens. 2022, 14, 6149. [Google Scholar] [CrossRef]
- Tawfeek, H.; Sedeek, A.; Rabah, M.; El-Fiky, G. Regional Ionosphere Mapping Using Zero Difference GPS Carrier Phase. Ann. Geophys. Discuss. 2018, 1–16. [Google Scholar] [CrossRef]
- Sedeek, A. Ionosphere delay remote sensing during geomagnetic storms over Egypt using GPS phase observations. Arab. J. Geosci. 2020, 13, 811. [Google Scholar] [CrossRef]
- Elghazouly, A.A.; Doma, M.I.; Sedeek, A.A. Validating the impact of various ionosphere correction on mid to long baselines and point positioning using GPS dual-frequency receivers. J. Appl. Geod. 2022, 16, 81–90. [Google Scholar] [CrossRef]
- Abdallah, A.; Agag, T.; Schwieger, V. Validation of CODE-GIM and Regional Ionosphere Model (RIM) for Single Frequency GNSS PPP Solution using Bernese GNSS software-Case Study: Egyptian Nile Delta. FIG Peer Rev. J. 2022. Available online: https://www.researchgate.net/publication/362208479_Validation_of_CODE-GIM_and_Regional_Ionosphere_Model_RIM_for_Single_Frequency_GNSS_PPP_Solution_using_Bernese_GNSS_software_-Case_Study_Egyptian_Nile_Delta (accessed on 27 April 2023).
- IGS. International GNSS Service (IGS). Available online: https://igs.org/station-resources/ (accessed on 6 November 2022).
- Teunissen, P.J.G.; Kleusberg, A. GPS Observation Equations and Positioning Concepts. In GPS for Geodesy; Teunissen, P.J.G., Kleusberg, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 175–217. [Google Scholar]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software, Version 5.2; AIUB-Astronomical Institute, University of Bern: Bern, Switzerland, 2015.
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph. D. Thesis, Bern University, Bern, Switzerland, 1999. [Google Scholar]
- Schaer, S.; Beutler, G.; Mervart, L.; Rothacher, M.; Wild, U. Global and regional ionosphere models using the GPS double difference phase observable. In Proceedings of the IGS Workshop” Special Topics and New Directions”, Potsdam, Germany, 15–17 May 1995. [Google Scholar]
- Abdallah, A. Precise Point Positioning for Kinematic Applications to Improve Hydrographic Survey. Ph.D. Dissertation, University of Stuttgart, Stuttgart, Germany, 2016. [Google Scholar]
- TBC. Trimble Business Center (TBC) Software. Available online: https://geospatial.trimble.com/products-and-solutions/trimble-business-center (accessed on 14 December 2022).
- Abdallah, A.; Agag, T. Reliability of CSRS-PPP for Validating the Egyptian Geodetic Cors Networks. Artif. Satell. 2022, 57, 58–76. [Google Scholar] [CrossRef]
- Abdallah, A.; Agag, T.; Dawod, G. ITRF-Based Tectonic Coordinates Changes using GNSS-CORS Networks: A Case Study of Egypt. Surv. Land Inf. Sci. 2021, 80, 69–78. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| File ID | Description |
|---|---|
| CODwwwwd.CLK | It refers to the satellite’s precise clocks with an interval of 30 s |
| CODwwwwd.EPH | It mentions the satellite’s precise orbits (.SP3) |
| CODwwwwd.ERP & CODwwww7.ERP | It refers to the daily and weekly earth rotation parameters |
| CODwwwwd.ION | It denotes the CODE’s global ionosphere maps |
| CODyymm.DCB | It indicates the CODE’s monthly solution for GPS P1-C1 and P1-P2 code biases for satellites and receivers in the format [yy: year, mm: month] |
| PCV_COD.I14 | It presents the list of antenna phase center variations derived from the ANTEX file in the format [I14.ATX] |
| CONST | It lists the general constants used during processing |
| DATUM | It contains a list of datum definitions for the software |
| RECEIVER | It identifies a list of receiver information files for the software |
| SAT_yyyy.CRX | It defines a list of satellite problems |
| SATELLITE.I14 | It summarizes a list of satellite-specific information |
| TIDE2000.TPO, IAU2000R06.NUT, IERS2010XY.SUB, and OT_FES2004.TID | These files refer to the coefficients for the solid earth tide, nutation, sub-daily pole, and ocean tide models, respectively. |
| Parameter | Value |
|---|---|
| Satellite constellation | GPS/GLONASS |
| Observation | Zero-Difference |
| Frequency combination | P4 |
| Cutoff elevation angle | 10° |
| Sampling interval | 30 s |
| Temporal resolution | 2 h |
| Nmax: max. degree of spherical harmonics | 6 |
| Mmax: max. order of spherical harmonics | 6 |
| H: height of single layer | 450 km |
| Reference frame definition | Geomagnetic |
| Geomagnetic pole (Latitude) | 79° |
| Geomagnetic pole (Longitude) | −71° |
| Grid (Lat. × Long.) | 2.5° × 5° |
| NO. | STATION ID | DOY 201 | DOY 202 | DOY 203 | DOY 204 | DOY 205 | DOY 206 | DOY 207 | DOY 208 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | ASHM | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 2 | AYAT | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 3 | BADR | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | x | x |
| 4 | BNHA | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 5 | DMNH | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | x |
| 6 | HMOL | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | x |
| 7 | ISNA | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | x | x |
| 8 | KBER | ✔ | ✔ | ✔ | x | ✔ | ✔ | x | x |
| 9 | MNSH | ✔ | ✔ | ✔ | x | x | ✔ | ✔ | ✔ |
| 10 | MNZL | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 11 | SHKH | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 12 | SMLT | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 13 | SUEF | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 14 | THAT | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| 15 | WAKF | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | x |
| EAST | NORTH | HEIGHT | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min. | Max. | Avg. | SD | Min. | Max. | Avg. | SD | Min. | Max. | Avg. | SD | |
| ASHM | 0.06 | 0.30 | 0.16 | 0.07 | 0.26 | 0.41 | 0.35 | 0.05 | 0.68 | 1.14 | 0.92 | 0.13 |
| AYAT | 0.06 | 0.31 | 0.17 | 0.08 | 0.29 | 0.42 | 0.36 | 0.05 | 0.72 | 1.08 | 0.89 | 0.13 |
| BADR | 0.08 | 0.27 | 0.16 | 0.09 | 0.27 | 0.59 | 0.39 | 0.20 | 0.17 | 1.01 | 0.82 | 0.47 |
| BNHA | 0.05 | 0.26 | 0.14 | 0.07 | 0.22 | 0.41 | 0.34 | 0.06 | 0.72 | 1.02 | 0.90 | 0.10 |
| DMNH | 0.02 | 0.26 | 0.14 | 0.10 | 0.16 | 0.47 | 0.38 | 0.17 | 0.64 | 1.09 | 0.91 | 0.35 |
| HMOL | 0.04 | 0.26 | 0.14 | 0.08 | 0.30 | 0.43 | 0.35 | 0.13 | 0.71 | 1.02 | 0.89 | 0.33 |
| ISNA | 0.01 | 0.40 | 0.13 | 0.13 | 0.38 | 0.54 | 0.44 | 0.21 | 0.71 | 1.02 | 0.90 | 0.43 |
| KBER | 0.05 | 0.44 | 0.20 | 0.15 | 0.30 | 0.45 | 0.39 | 0.21 | 0.84 | 1.09 | 0.93 | 0.50 |
| MNSH | 0.09 | 0.38 | 0.18 | 0.12 | 0.32 | 0.49 | 0.39 | 0.15 | 0.68 | 1.18 | 0.89 | 0.35 |
| MNZL | 0.05 | 0.27 | 0.15 | 0.07 | 0.27 | 0.40 | 0.34 | 0.05 | 0.73 | 1.28 | 0.94 | 0.17 |
| SHKH | 0.07 | 0.25 | 0.16 | 0.07 | 0.28 | 0.39 | 0.34 | 0.04 | 0.72 | 1.17 | 0.90 | 0.15 |
| SMLT | 0.02 | 0.25 | 0.15 | 0.07 | 0.30 | 0.36 | 0.33 | 0.02 | 0.77 | 1.08 | 0.94 | 0.09 |
| SUEF | 0.02 | 0.28 | 0.13 | 0.08 | 0.24 | 0.40 | 0.35 | 0.05 | 0.72 | 1.11 | 0.92 | 0.11 |
| THAT | 0.04 | 0.32 | 0.15 | 0.08 | 0.30 | 0.46 | 0.40 | 0.06 | 0.71 | 1.09 | 0.94 | 0.14 |
| WAKF | 0.06 | 0.45 | 0.20 | 0.14 | 0.30 | 0.52 | 0.39 | 0.07 | 0.76 | 1.30 | 1.00 | 0.16 |
| EAST | NORTH | HEIGHT | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min. | Max. | Avg. | SD | Min. | Max. | Avg. | SD | Min. | Max. | Avg. | SD | |
| ASHM | 0.00 | 0.18 | 0.05 | 0.05 | 0.08 | 0.13 | 0.10 | 0.02 | 0.05 | 0.30 | 0.18 | 0.08 |
| AYAT | 0.00 | 0.23 | 0.08 | 0.08 | 0.09 | 0.15 | 0.12 | 0.02 | 0.05 | 0.38 | 0.25 | 0.11 |
| BADR | 0.01 | 0.21 | 0.10 | 0.08 | 0.08 | 0.24 | 0.12 | 0.08 | 0.11 | 0.41 | 0.26 | 0.15 |
| BNHA | 0.00 | 0.16 | 0.05 | 0.05 | 0.09 | 0.14 | 0.11 | 0.02 | 0.11 | 0.29 | 0.19 | 0.07 |
| DMNH | 0.02 | 0.16 | 0.07 | 0.06 | 0.09 | 0.19 | 0.14 | 0.06 | 0.03 | 0.38 | 0.19 | 0.14 |
| HMOL | 0.03 | 0.17 | 0.07 | 0.05 | 0.10 | 0.15 | 0.13 | 0.05 | 0.08 | 0.33 | 0.19 | 0.11 |
| ISNA | 0.01 | 0.29 | 0.10 | 0.10 | 0.21 | 0.28 | 0.24 | 0.11 | 0.34 | 0.47 | 0.40 | 0.19 |
| KBER | 0.03 | 0.32 | 0.11 | 0.11 | 0.10 | 0.15 | 0.13 | 0.07 | 0.07 | 0.28 | 0.17 | 0.11 |
| MNSH | 0.01 | 0.28 | 0.09 | 0.09 | 0.13 | 0.20 | 0.17 | 0.06 | 0.20 | 0.46 | 0.31 | 0.14 |
| MNZL | 0.01 | 0.14 | 0.05 | 0.04 | 0.07 | 0.15 | 0.12 | 0.03 | 0.08 | 0.44 | 0.20 | 0.13 |
| SHKH | 0.01 | 0.15 | 0.06 | 0.05 | 0.09 | 0.16 | 0.12 | 0.02 | 0.04 | 0.36 | 0.20 | 0.11 |
| SMLT | 0.01 | 0.11 | 0.07 | 0.03 | 0.08 | 0.13 | 0.11 | 0.02 | 0.14 | 0.37 | 0.23 | 0.08 |
| SUEF | 0.01 | 0.17 | 0.05 | 0.05 | 0.07 | 0.11 | 0.10 | 0.01 | 0.11 | 0.32 | 0.21 | 0.09 |
| THAT | 0.04 | 0.22 | 0.08 | 0.06 | 0.06 | 0.18 | 0.14 | 0.04 | 0.18 | 0.44 | 0.27 | 0.09 |
| WAKF | 0.02 | 0.32 | 0.12 | 0.11 | 0.08 | 0.13 | 0.10 | 0.02 | 0.23 | 0.76 | 0.39 | 0.17 |
| DOY | Station ID | Observation Time (Hours) | DOY | Station ID | Observation Time (Hours) |
|---|---|---|---|---|---|
| 201 | MNSH | 13.25 | 204 | ISNA | 17.48 |
| MNZL | 15.70 | THAT | 22.23 | ||
| WAKF | 1.30 | WAKF | 16.52 | ||
| 202 | ISNA | 20.87 | 205 | ISNA | 20.00 |
| WAKF | 17.78 | WAKF | 16.80 | ||
| 203 | ISNA | 20.93 | 206 | ISNA | 16.77 |
| KBER | 7.5 | WAKF | 17.05 | ||
| MNSH | 21.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdallah, A.; Agag, T.; Schwieger, V. Method of Development of a New Regional Ionosphere Model (RIM) to Improve Static Single-Frequency Precise Point Positioning (SF-PPP) for Egypt Using Bernese GNSS Software. Remote Sens. 2023, 15, 3147. https://doi.org/10.3390/rs15123147
Abdallah A, Agag T, Schwieger V. Method of Development of a New Regional Ionosphere Model (RIM) to Improve Static Single-Frequency Precise Point Positioning (SF-PPP) for Egypt Using Bernese GNSS Software. Remote Sensing. 2023; 15(12):3147. https://doi.org/10.3390/rs15123147
Chicago/Turabian StyleAbdallah, Ashraf, Tarek Agag, and Volker Schwieger. 2023. "Method of Development of a New Regional Ionosphere Model (RIM) to Improve Static Single-Frequency Precise Point Positioning (SF-PPP) for Egypt Using Bernese GNSS Software" Remote Sensing 15, no. 12: 3147. https://doi.org/10.3390/rs15123147
APA StyleAbdallah, A., Agag, T., & Schwieger, V. (2023). Method of Development of a New Regional Ionosphere Model (RIM) to Improve Static Single-Frequency Precise Point Positioning (SF-PPP) for Egypt Using Bernese GNSS Software. Remote Sensing, 15(12), 3147. https://doi.org/10.3390/rs15123147