
Polarimetric Range Extended Target Detection via Adaptive Range Weighted Feature Extraction


Abstract
1. Introduction
- We propose a feature-domain polarimetric RET detection framework. There are two branches in this framework; one extracts polarimetric features on each range cell and the other calculates weight for each range cell. By using range cells weights to accumulate features of range cells as FDS, the influence of clutter can be reduced while the weak scattering centers can be preserved, thereby improving detection performance.
- An attention-based network is designed to adaptively calculate range cells weights in the weight calculation branch. This AMN is pretrained on known target data to obtain the adaptive weights calculation ability. At the same time, both amplitude and feature information are used in the training process, which helps to obtain better calculate performance.
- Numerous experiments are carried out to verify the effectiveness of the proposed method as compared with both popular energy-domain detection methods and existing feature-domain detection methods.
2. Background
2.1. Polarimetric Range Extended Target Detection
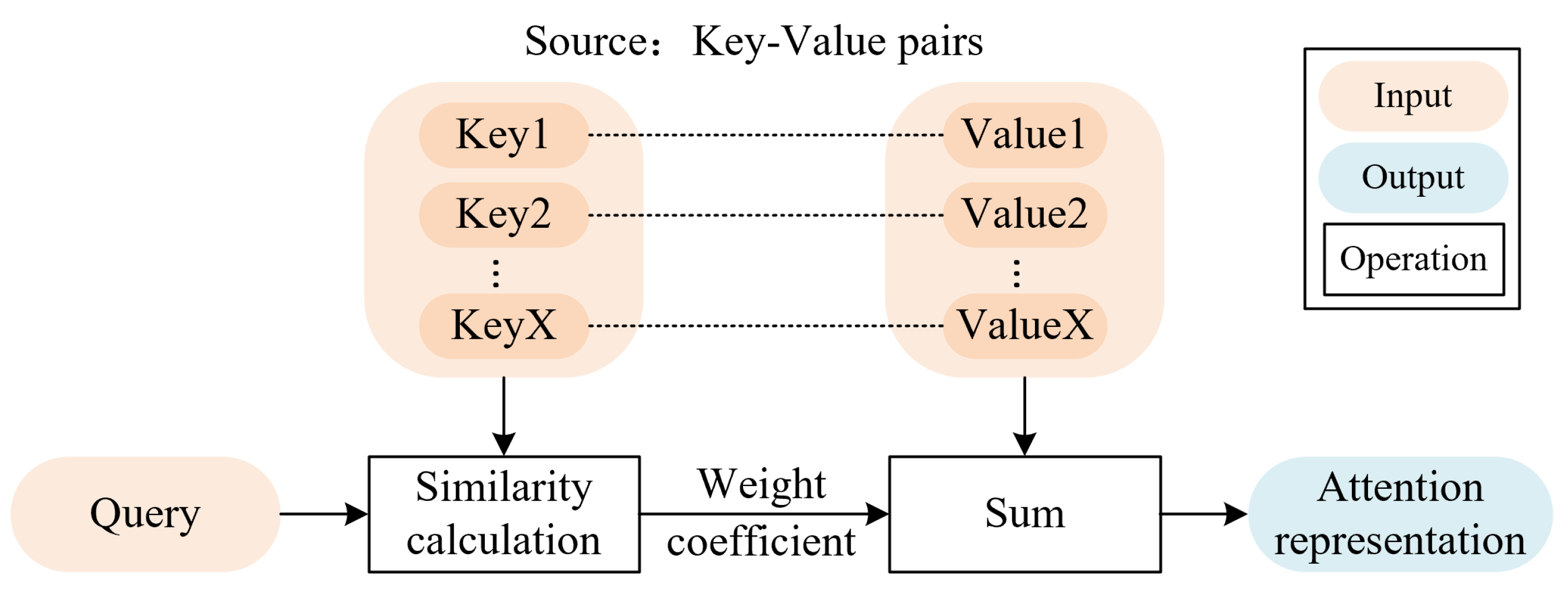
2.2. Attention Mechanism Network
- (1)
- Calculate the similarity between the and each , and find the weight. The commonly used calculation similarity functions include dot product similarity, stitching similarity, cosine similarity, etc. We use dot product similarity here:
- (2)
- Use softmax to normalize the weight to find the weight coefficient:where represents the softmax function which converts a vector of numbers into a vector of probabilities, where the probabilities of each value are proportional to the relative scale of each value in the vector. represents dot product similarity between and as shown in (5).
- (3)
- Use weight coefficient to sum to obtain the final attention representation:
3. Methods
3.1. Structure and Composition
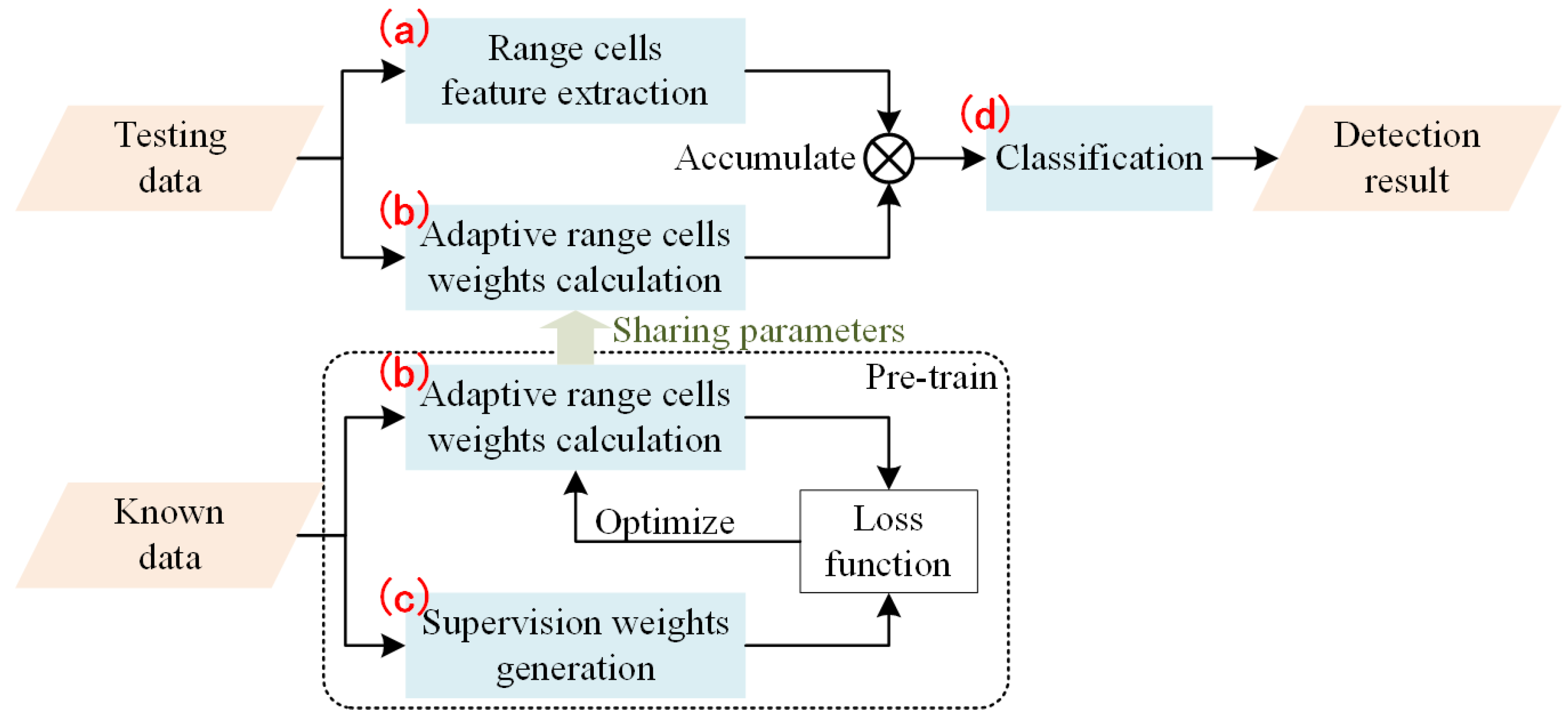
3.1.1. Overall Structure
3.1.2. Range Cells Feature Extraction Module
- (1)
- Freeman decomposition features
- (2)
- Pauli decomposition features
- (3)
- Krogager decomposition features
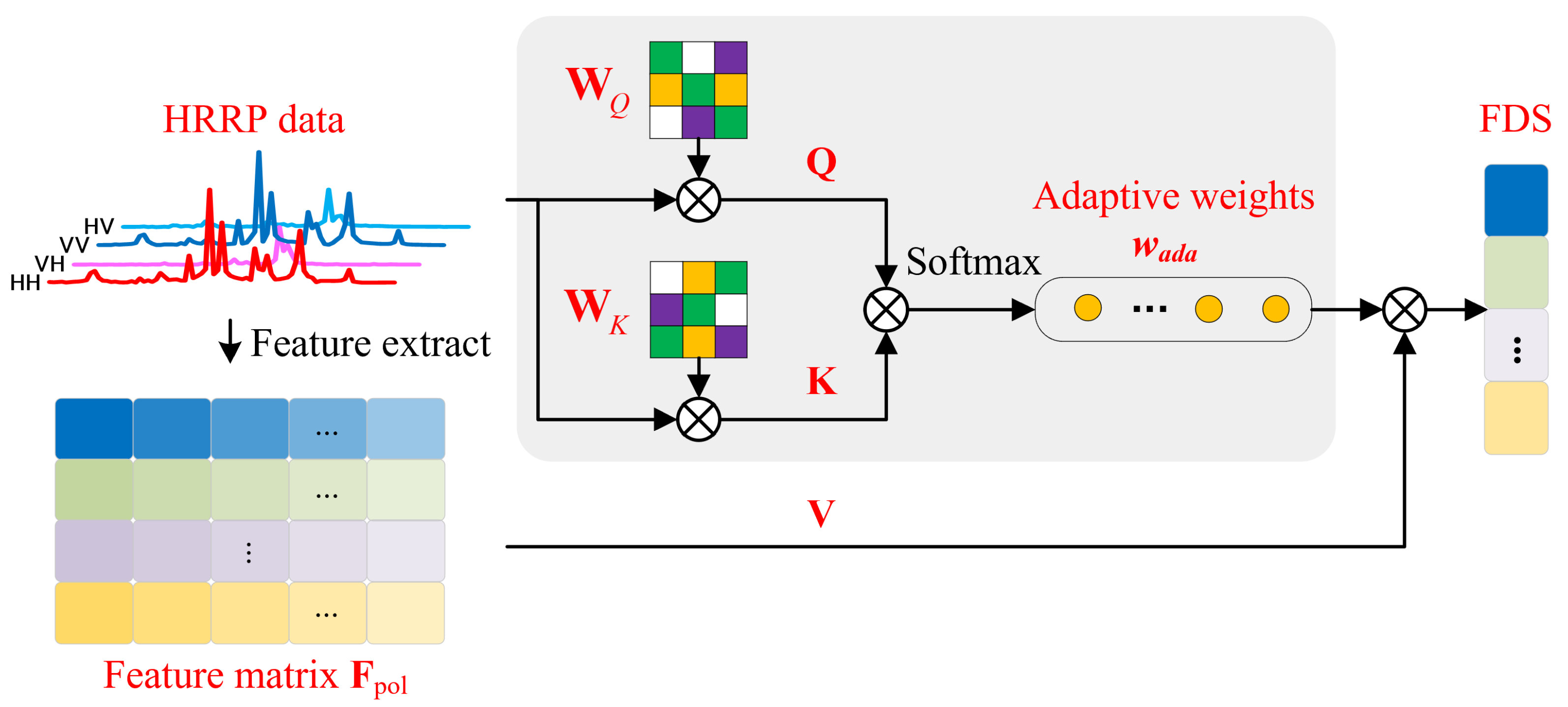
3.1.3. Adaptive Range Cells Weights Calculation Module
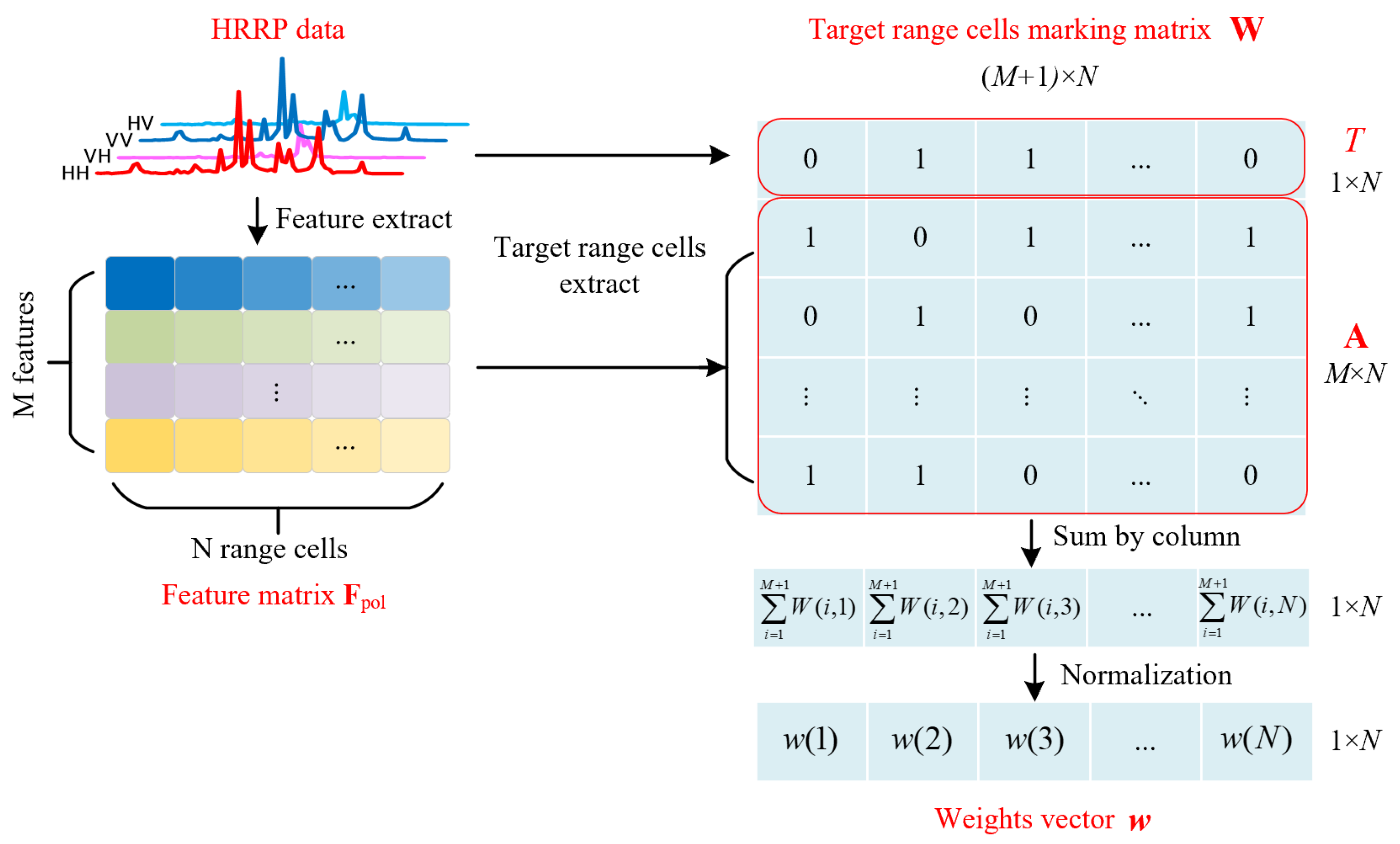
3.1.4. Supervision Weights Generation Module
- (1)
- According to the amplitude, we calculate the amplitude-based marking vector T. Specifically, we use the polarimetric whitening filter (PWF) to process the four polarization channels into one single channel. Then, we consider the range cells where the target locates as high contribution (marked with 1), and the other range cells as low contribution (marked with 0). These markers together constitute the amplitude-based marker vector .
- (2)
- According to the polarimetric features, we calculate the feature-based marking matrix . Specifically, each feature value in feature matrix is compared with this feature’s upper and lower quantiles which are calculated on clutter data in advance. If the feature value is between these two quantiles, the corresponding range cell is considered as low contribution and marked with 0, or the range cell is considered as high contribution and marked with 1. These markers together constitute the feature-based marking matrix . The formula iswhere represents the sequence number of the feature, n represents the index of the range cell, and represent the lower and upper quantiles of the th feature, and represents the value of the th feature of the th range cell in the feature matrix .
- (3)
- According to the frequency of each range cell marked as high contribution, we obtain supervision weights . Specifically, vector T and matrix are combined to obtain the target range cells marking matrix , and the is summed by column and normalized to obtain the supervision weights . The formula iswhere represents the supervision weight of the -th range cell.
3.1.5. Classification Module
3.2. Training and Testing Procedure
- (1)
- First, the parameters of AMN in the adaptive range cells weights calculation module need to be trained in advance to have the ability to adaptively calculate range cells’ weights. The known target data and clutter data are used in the training to let the network learn to find the difference on the range cells between targets and clutter. The dataset used in this step is denoted as .
- (2)
- Then, the classification module needs to be trained in advance to find the hypersphere that classifies clutter and targets. Since the targets are unknown in practice, here, we only use the set of clutter features for training. The dataset used in this step is denoted as .
- (3)
- Finally, when detecting, the polarimetric HRRPs are input, and the FDSs are obtained through range cells feature extraction, weights calculation, and feature accumulation. The FDSs are input into the classification module to obtain the detection results. The dataset used in this step is denoted as .
4. Results
4.1. Experimental Settings
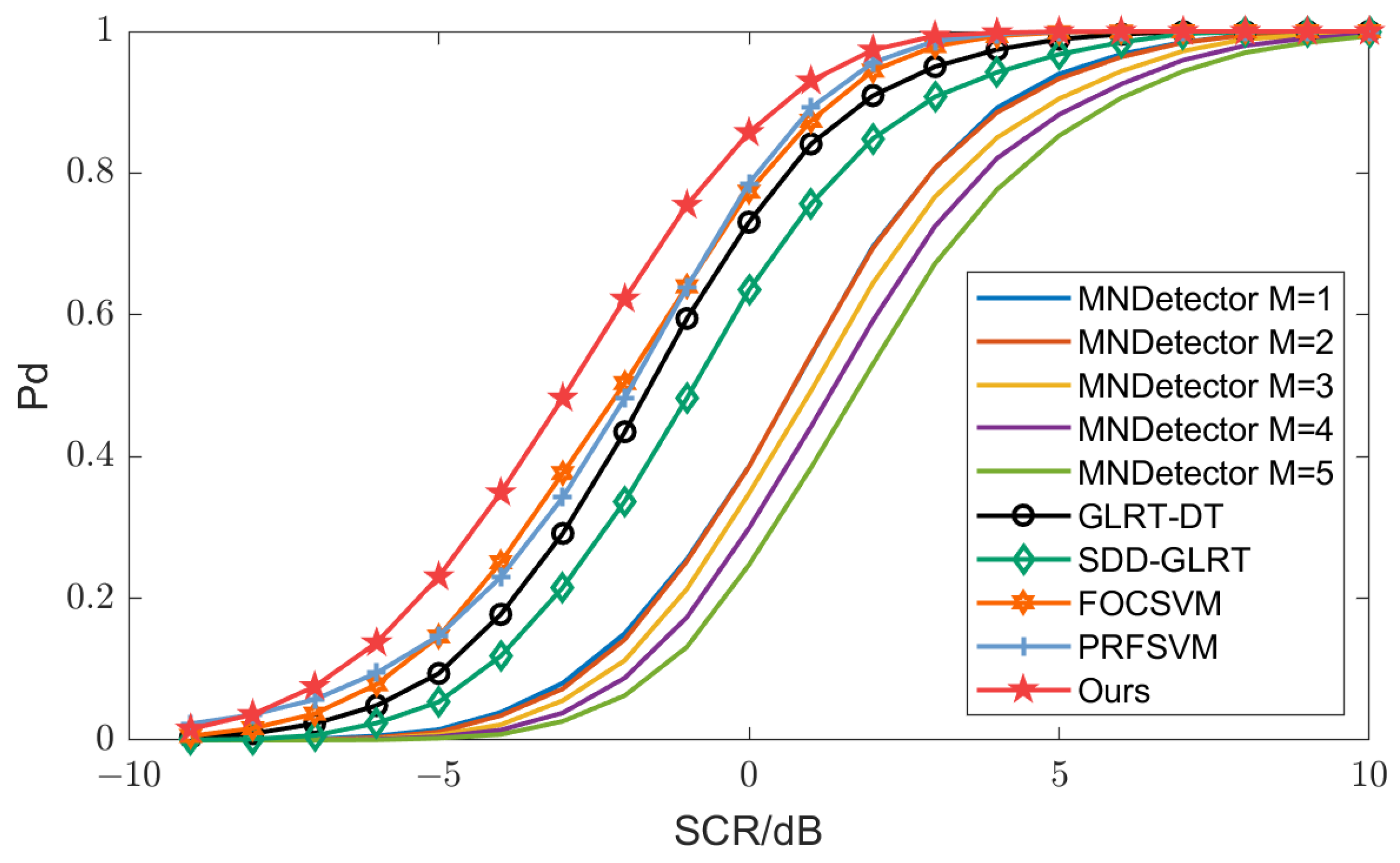
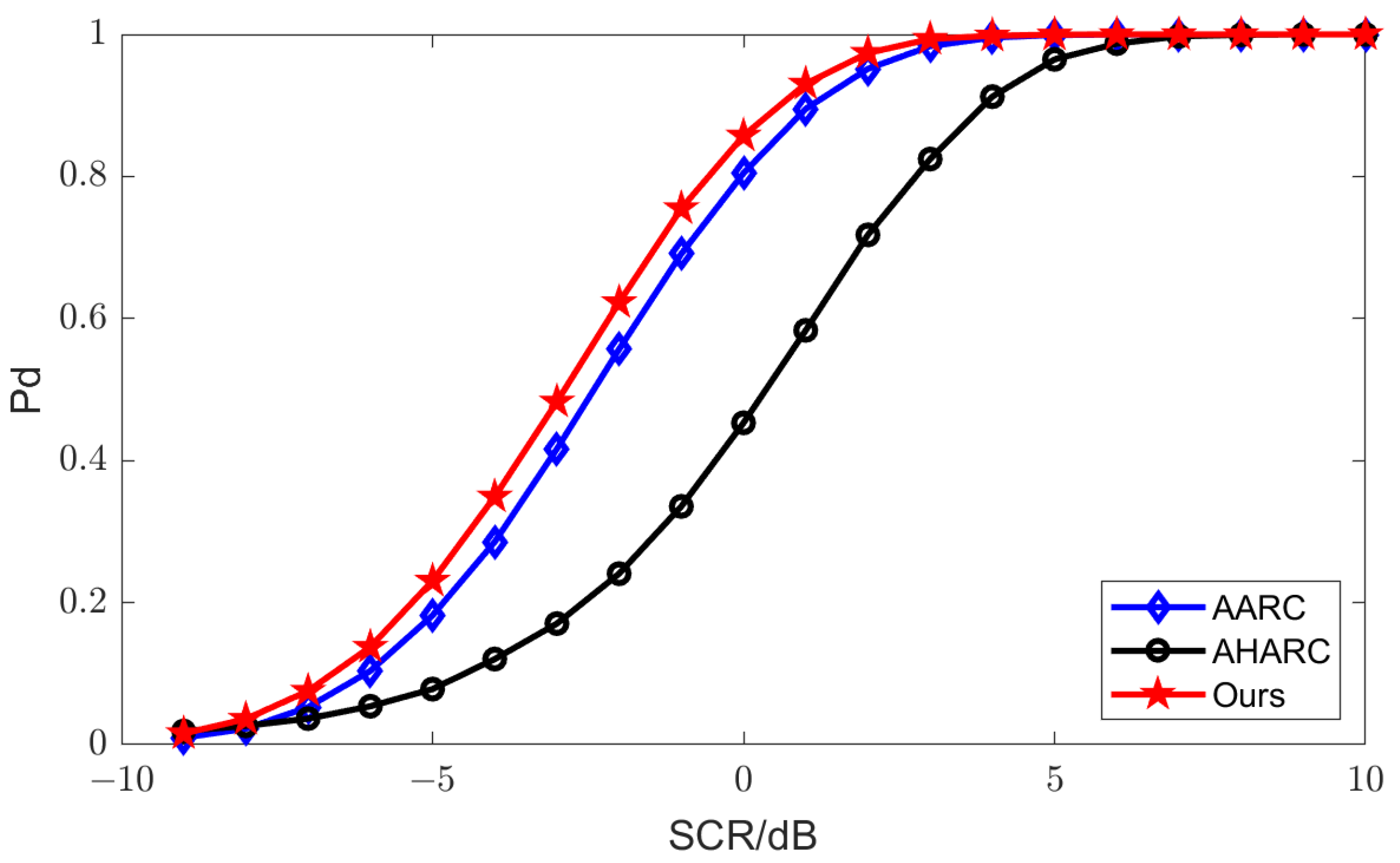
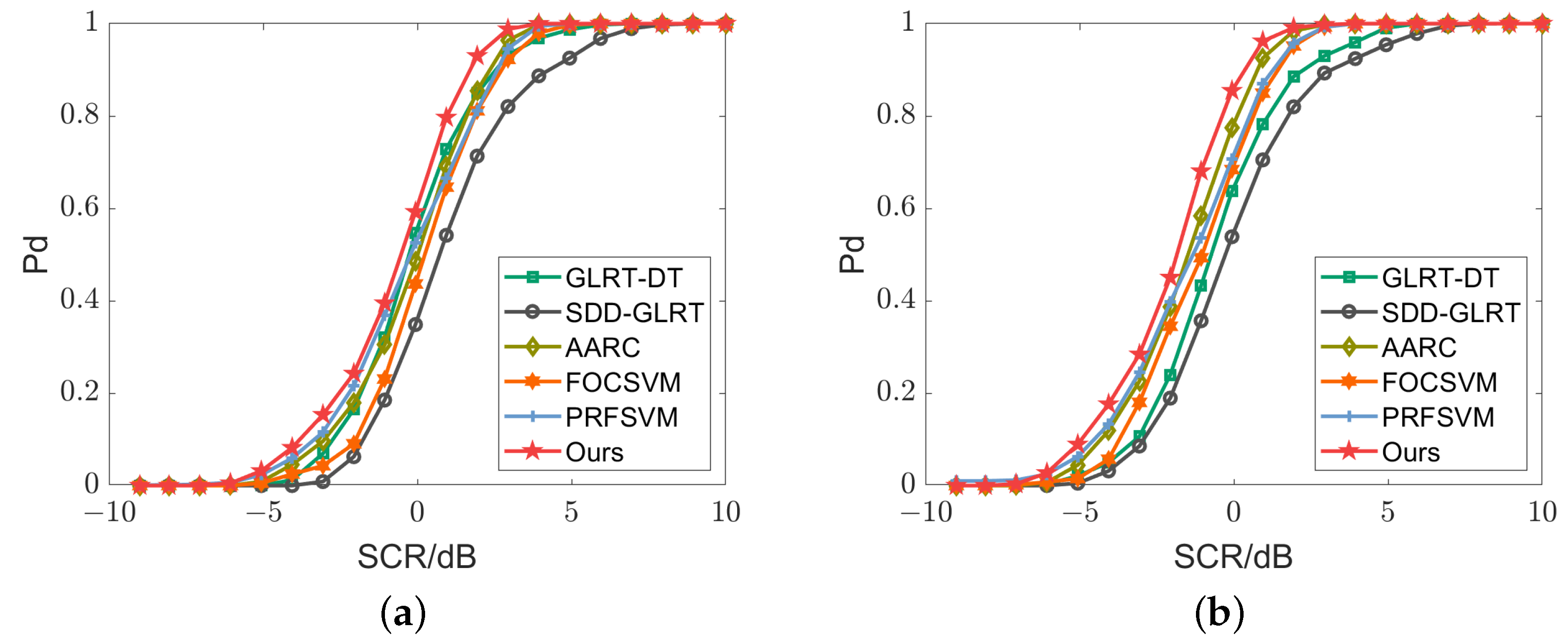
4.2. Comparison with Other Detection Methods
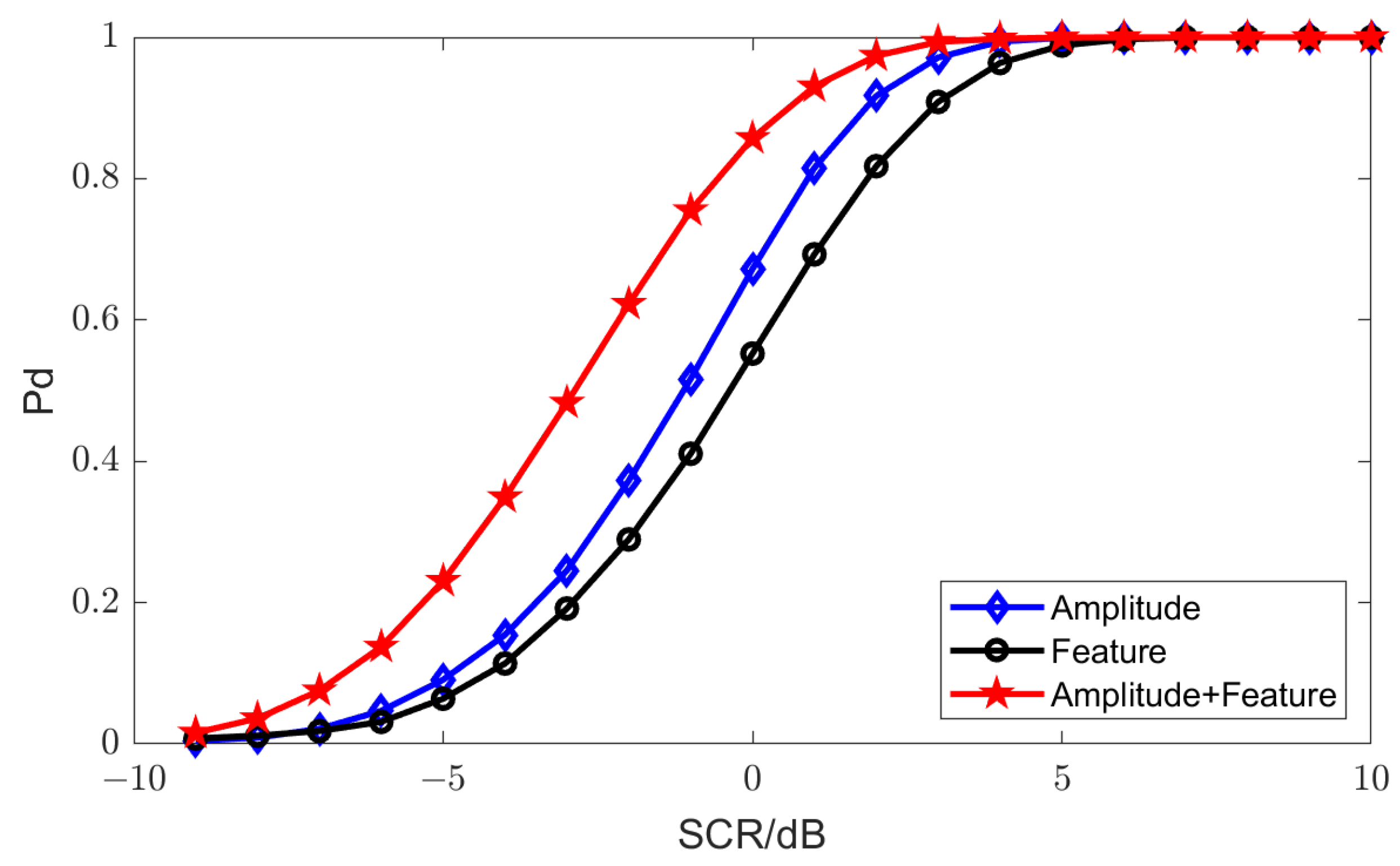
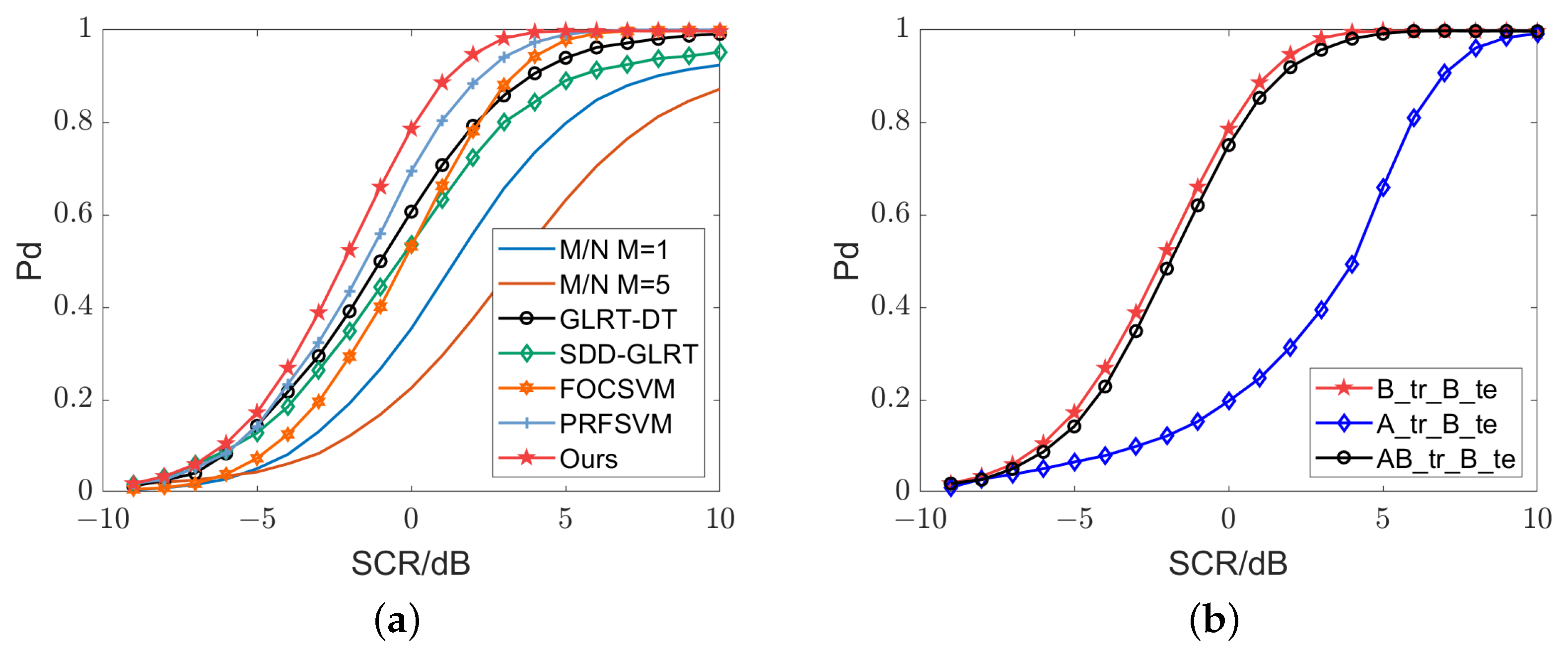
4.3. Analysis on Module Settings
4.3.1. Analysis on the Adaptive Range Cells Weights Calculation Module
- (1)
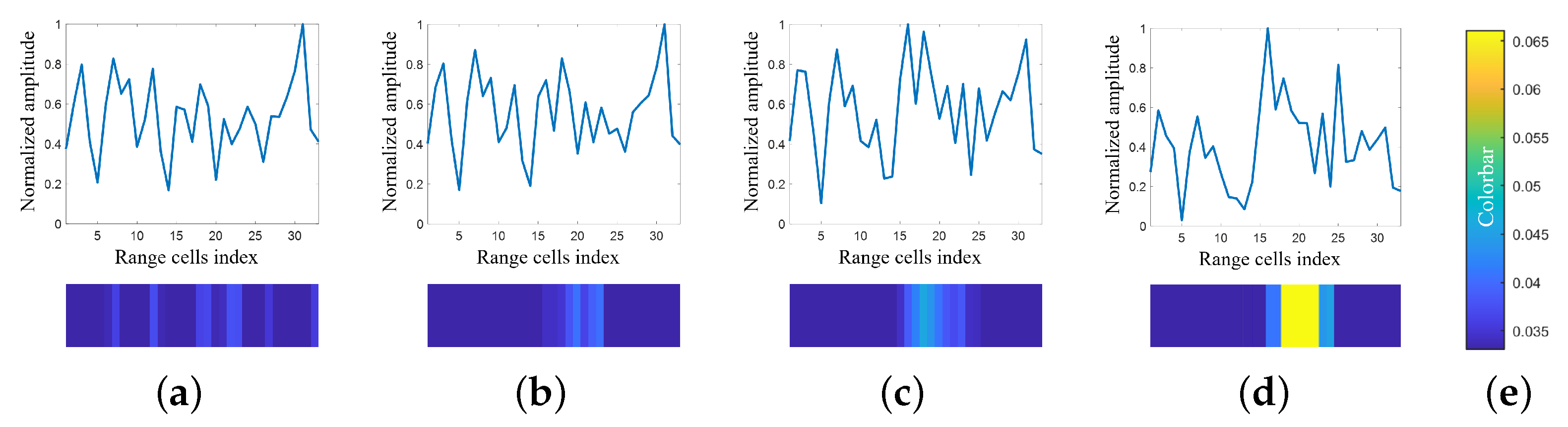
- Visual analysis on adaptive weights
- (2)
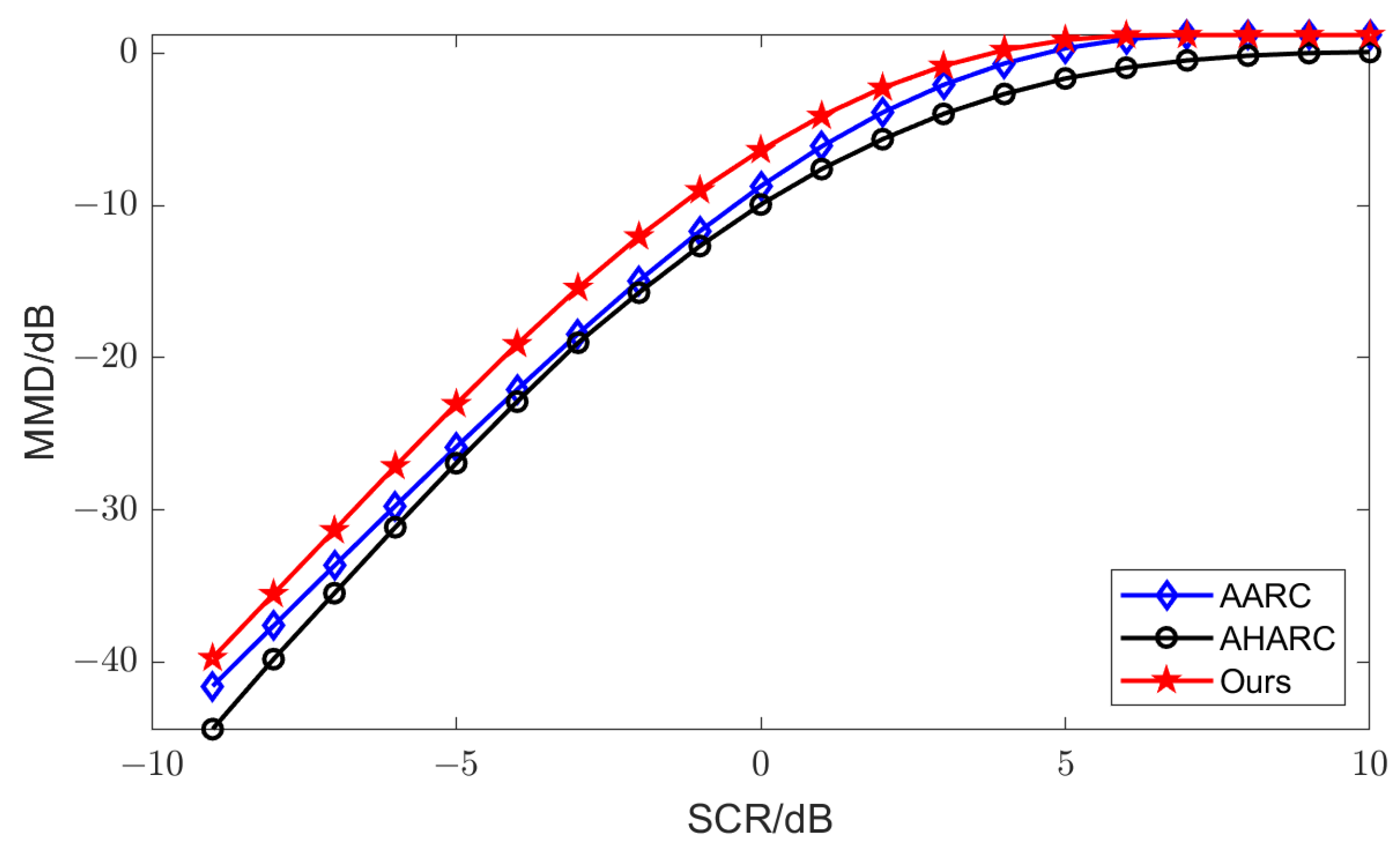
- Separability analysis between clutter and target
4.3.2. Analysis on Supervision Weights Calculation Module
4.4. Analysis on Different Target Models
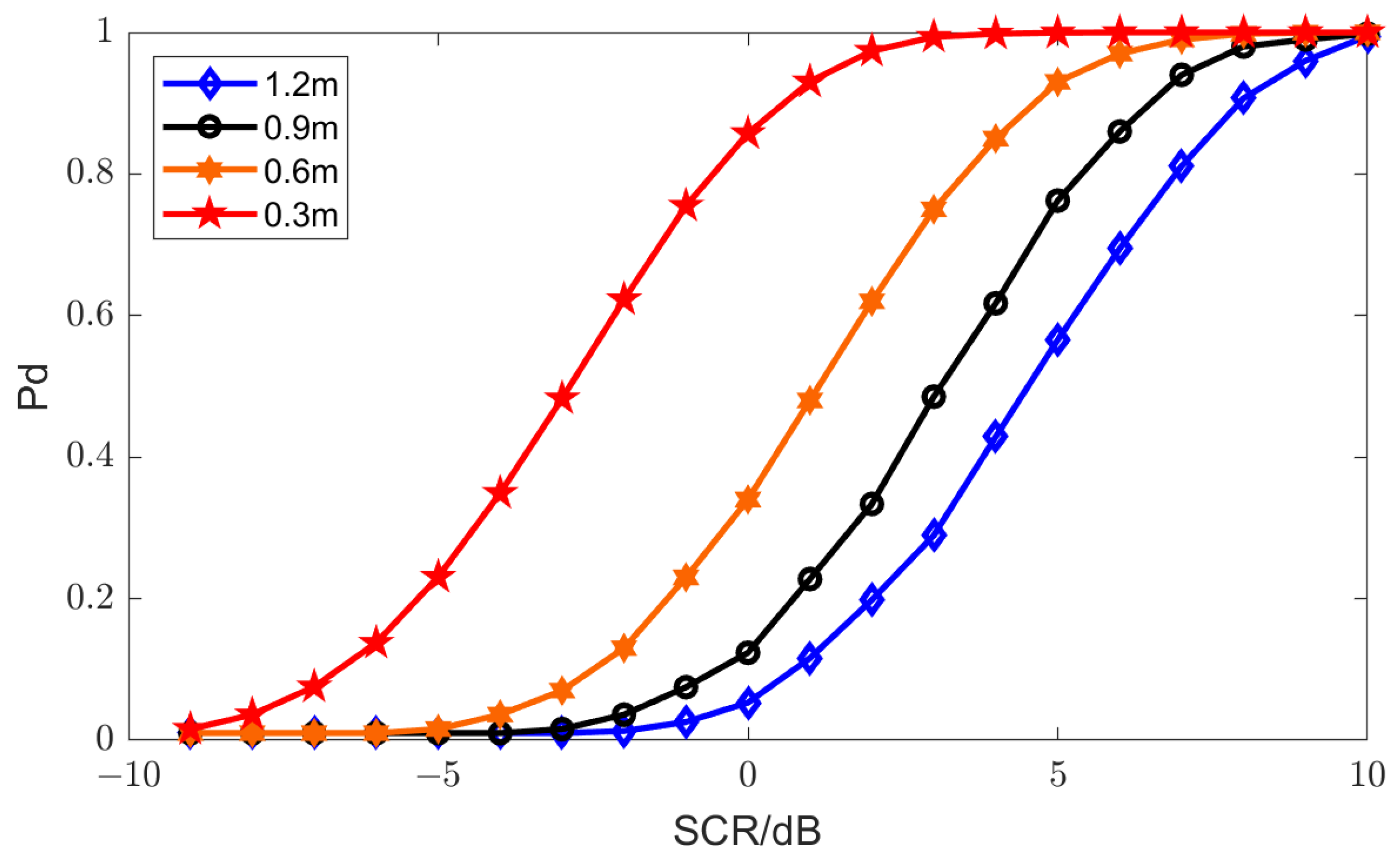
4.5. Analysis on Range Resolution
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMN | Attention mechanism network |
| FDS | Feature-domain detection statistics |
| GTRI | Georgia Technology Research Institute |
| HRRP | High-resolution range profile |
| MMD | Maximum mean discrepancy |
| OCSVM | One-class support vector machine |
| Pd | Detection probability |
| PWF | Polarimetric whitening filter |
| RET | Range extended target |
| SCR | Signal-to-clutter ratio |
| 1D | One-dimensional |
| 2D | Two-dimensional |
References
- Wang, J.; Liu, Z.; Xie, R.; Ran, L. Radar HRRP Target Recognition Based on Dynamic Learning with Limited Training Data. Remote Sens. 2021, 13, 750. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, Y.; Li, Y.; Chen, X. Eigenvalue-based ground target detection in high-resolution range profiles. IET Radar Sonar Navig. 2020, 14, 1747–1756. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, L.; Xi, Y.; Wang, Y.; Li, Y. Polarimetric HRRP Target Recognition Based on Convlstm. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 334–337. [Google Scholar] [CrossRef]
- Fei, C.; Liu, T.; Lampropoulos, G.A.; Anastassopoulos, V. Markov Chain CFAR Detection for Polarimetric Data Using Data Fusion. IEEE Trans. Geosci. Remote Sens. 2012, 50, 397–408. [Google Scholar] [CrossRef]
- Chen, X.; Hou, K.; Chang, S.; Liu, Q.; Ren, W. Detection of range-spread targets based on order statistics. Digit. Signal Process. 2023, 133, 103803. [Google Scholar] [CrossRef]
- Gao, C.; Yan, J.; Peng, X.; Liu, H. Signal structure information-based target detection with a fully convolutional network. Inf. Sci. 2021, 576, 345–354. [Google Scholar] [CrossRef]
- Xu, L.; Feng, D.; Zhang, R.; Wang, X. High-Resolution Range Profile Deception Method Based on Phase-Switched Screen. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1665–1668. [Google Scholar] [CrossRef]
- Novak, L.; Burl, M.; Irving, W. Optimal polarimetric processing for enhanced target detection. IEEE Trans. Aerosp. Electron. Syst. 1993, 29, 234–244. [Google Scholar] [CrossRef]
- Novak, L.; Burl, M. Optimal speckle reduction in polarimetric SAR imagery. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 293–305. [Google Scholar] [CrossRef]
- Boerner, W.M.; Kostinski, A.; James, B. On The Concept of The Polarimetric Matched Filter in High Resolution Radar Imaging: An Alternative for Speckle Reduction. In Proceedings of the International Geoscience and Remote Sensing Symposium, ‘Remote Sensing: Moving Toward the 21st Century’, Edinburgh, UK, 12–16 September 1988; Volume 1, pp. 69–72. [Google Scholar] [CrossRef]
- Velotto, D.; Nunziata, F.; Migliaccio, M.; Lehner, S. Dual-Polarimetric TerraSAR-X SAR Data for Target at Sea Observation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1114–1118. [Google Scholar] [CrossRef]
- Marino, A. A Notch Filter for Ship Detection With Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1219–1232. [Google Scholar] [CrossRef]
- Van Der Spek, G. Detection of a Distributed Target. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 922–931. [Google Scholar] [CrossRef]
- Kelly, E. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Gerlach, K.; Steiner, M.; Lin, F. Detection of a spatially distributed target in white noise. IEEE Signal Process. Lett. 1997, 4, 198–200. [Google Scholar] [CrossRef]
- Chen, X.; Gai, J.; Liang, Z.; Liu, Q.; Long, T. Adaptive Double Threshold Detection Method for Range-Spread Targets. IEEE Signal Process. Lett. 2022, 29, 254–258. [Google Scholar] [CrossRef]
- Ren, Z.; Yi, W.; Zhao, W.; Kong, L. Range-Spread Target Detection Based on Adaptive Scattering Centers Estimation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Long, T.; Zheng, L.; Li, Y.; Yang, X. Improved Double Threshold Detector for Spatially Distributed Target. IEICE Trans. Commun. 2012, E95.B, 1475–1478. [Google Scholar] [CrossRef]
- Gerlach, K.; Steiner, M. Adaptive detection of range distributed targets. IEEE Trans. Signal Process. 1999, 47, 1844–1851. [Google Scholar] [CrossRef]
- Du, L.; Liu, X.; Li, B.; Xu, S. HRRP Clutter Rejection Via One-Class Classifier With Hausdorff Distance. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2517–2526. [Google Scholar] [CrossRef]
- Diao, P.S.; Alves, T.; Poussot, B.; Azarian, S. A review of Radar Detection Fundamentals. IEEE Aerosp. Electron. Syst. Mag. 2022; Early access. [Google Scholar] [CrossRef]
- Li, X.; Sun, Z.; Yeo, T.S.; Zhang, T.; Yi, W.; Cui, G.; Kong, L. STGRFT for Detection of Maneuvering Weak Target With Multiple Motion Models. IEEE Trans. Signal Process. 2019, 67, 1902–1917. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhu, H.; Wang, Q.; Yuan, W.; Yuan, N. Correlation feature-based detector for range distributed target in sea clutter. EURASIP J. Adv. Signal Process. 2018, 2018, 25. [Google Scholar] [CrossRef]
- Li, X.; Cui, G.; Kong, L.; Yi, W. Fast Non-Searching Method for Maneuvering Target Detection and Motion Parameters Estimation. IEEE Trans. Signal Process. 2016, 64, 2232–2244. [Google Scholar] [CrossRef]
- Li, H.; Cui, X.; Chen, S. PolSAR Ship Detection with Optimal Polarimetric Rotation Domain Features and SVM. Remote Sens. 2021, 13, 3932. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Touzi, R.; Charbonneau, F.; Hawkins, R.; Murnaghan, K.; Kavoun, X. Ship-sea contrast optimization when using polarimetric SARs. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 1, pp. 426–428. [Google Scholar] [CrossRef]
- Shi, X.; Yang, C.; Wang, X.; Dong, S. Dual-Polarimetric Persymmetric Adaptive Subspace Detector for Range-Spread Targets in Heavy-Tailed Non-Gaussian Clutter. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Xu, S.; Ma, Y.; Bai, X. Small Target Detection Method in Sea Clutter Based on Interframe Multi-feature Iteration. In Proceedings of the 2021 IEEE 6th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 22–24 October 2021; pp. 82–87. [Google Scholar] [CrossRef]
- Sugimoto, M.; Ouchi, K.; Nakamura, Y. On the novel use of model-based decomposition in SAR polarimetry for target detection on the sea. Remote Sens. Lett. 2013, 4, 843–852. [Google Scholar] [CrossRef]
- Chen, S.W.; Wang, X.S.; Xiao, S.P.; Sato, M. Target Scattering Mechanism in Polarimetric Synthetic Aperture Radar; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Yang, X.; Wen, G.; Ma, C.; Hui, B.; Ding, B.; Zhang, Y. CFAR Detection of Moving Range-Spread Target in White Gaussian Noise Using Waveform Contrast. IEEE Geosci. Remote Sens. Lett. 2016, 13, 282–286. [Google Scholar] [CrossRef]
- Shui, P.-L.; Liu, H.-W.; Bao, Z. Range-Spread Target Detection Based on Cross Time-Frequency Distribution Features of Two Adjacent Received Signals. IEEE Trans. Signal Process. 2009, 57, 3733–3745. [Google Scholar] [CrossRef]
- Shi, Y.; Xie, X.; Li, D. Range Distributed Floating Target Detection in Sea Clutter via Feature-Based Detector. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1847–1850. [Google Scholar] [CrossRef]
- Xu, S.; Shi, X.; Xue, J.; Shui, P. Maneuvering range-spread target detection in white Gaussian noise using multiple-pulse combined waveform contrast. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, X.K. Low Observable Targets Detection by Joint Fractal Properties of Sea Clutter: An Experimental Study of IPIX OHGR Datasets. IEEE Trans. Antennas Propag. 2010, 58, 1425–1429. [Google Scholar] [CrossRef]
- Xu, S.; Zhu, J.; Shui, P.; Xia, X. Floating Small Target Detection in Sea Clutter by One-Class SVM based on Three Detection Features. In Proceedings of the 2019 International Applied Computational Electromagnetics Society Symposium—China (ACES), Nanjing, China, 8–11 August 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Gaglione, D.; Clemente, C.; Pallotta, L.; Proudler, I.; De Maio, A.; Soraghan, J.J. Krogager decomposition and Pseudo-Zernike moments for polarimetric distributed ATR. In Proceedings of the 2014 Sensor Signal Processing for Defence (SSPD), Edinburgh, UK, 8–9 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Rogers, G.W.; Rais, H.; Cameron, W.L. Polarimetric SAR Signature Detection Using the Cameron Decomposition. IEEE Trans. Geosci. Remote Sens. 2014, 52, 690–700. [Google Scholar] [CrossRef]
- Erith, M.; Alfonso, Z.; Erik, L. A Multi-Sensor Approach to Separate Palm Oil Plantations from Forest Cover Using NDFI and a Modified Pauli Decomposition Technique. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4481–4484. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Cloude, S.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Carretero-Moya, J.; De Maio, A.; Gismero-Menoyo, J.; Asensio-Lopez, A. Experimental Performance Analysis of Distributed Target Coherent Radar Detectors. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2216–2238. [Google Scholar] [CrossRef]
- Liang, Z.; Gai, J.; Chen, X.; Ma, T.; Liu, Q. A Method for Threshold Setting and False Alarm Probability Evaluation for Radar Detectors. Signal Process. 2023, 207, 108930. [Google Scholar] [CrossRef]
- Yan, J.; Liu, H.; Pu, W.; Bao, Z. Exact Fisher Information Matrix With State-Dependent Probability of Detection. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1555–1561. [Google Scholar] [CrossRef]
- Shi, C.; Wang, F.; Sellathurai, M.; Zhou, J.; Salous, S. Low Probability of Intercept-Based Optimal Power Allocation Scheme for an Integrated Multistatic Radar and Communication System. IEEE Syst. J. 2020, 14, 983–994. [Google Scholar] [CrossRef]
- Zhao, Y.; Qin, J.; Yin, B. Adaptive targets detection in polarimetric high resolution radar. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 1374–1377. [Google Scholar] [CrossRef]
- Xu, K.; Ba, J.; Kiros, R.; Cho, K.; Courville, A.C.; Salakhutdinov, R.; Zemel, R.S.; Bengio, Y. Show, Attend and Tell: Neural Image Caption Generation with Visual Attention. arXiv 2015. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2017. [Google Scholar] [CrossRef]
- Mnih, V.; Heess, N.M.O.; Graves, A.; Kavukcuoglu, K. Recurrent Models of Visual Attention. arXiv 2014. [Google Scholar] [CrossRef]
- Tang, L.; Tang, W.; Qu, X.; Han, Y.; Wang, W.; Zhao, B. A Scale-Aware Pyramid Network for Multi-Scale Object Detection in SAR Images. Remote Sens. 2022, 14, 973. [Google Scholar] [CrossRef]
- Piao, Z.; Wang, J.; Tang, L.; Zhao, B.; Wang, W. AccLoc: Anchor-Free and two-stage detector for accurate object localization. Pattern Recognit. 2022, 126, 108523. [Google Scholar] [CrossRef]
- Bu, Y.; Wang, X.; Zhang, B.; Guo, S.; Cui, G. Multidomain Fusion Method for Human Head Movement Recognition. IEEE Trans. Instrum. Meas. 2023, 72, 1–8. [Google Scholar] [CrossRef]
- Dubey, A.; Santra, A.; Fuchs, J.; Lübke, M.; Weigel, R.; Lurz, F. HARadNet: Anchor-free target detection for radar point clouds using hierarchical attention and multi-task learning. Mach. Learn. Appl. 2022, 8, 100275. [Google Scholar] [CrossRef]
- Li, H.; Cui, G.; Guo, S.; Kong, L.; Yang, X. Human Target Detection Based on FCN for Through-the-Wall Radar Imaging. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1565–1569. [Google Scholar] [CrossRef]
- Chaudhari, S.; Mithal, V.; Polatkan, G.; Ramanath, R. An Attentive Survey of Attention Models. ACM Trans. Intell. Syst. Technol. 2021, 12, 1–32. [Google Scholar] [CrossRef]
- Li, Y.; Xie, P.; Tang, Z.; Jiang, T.; Qi, P. SVM-Based Sea-Surface Small Target Detection: A False-Alarm-Rate-Controllable Approach. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1225–1229. [Google Scholar] [CrossRef]
- Wang, W.; Song, W.; Li, Z.; Zhao, B.; Zhao, B. A Novel Filter-Based Anomaly Detection Framework for Hyperspectral Imagery. IEEE Access 2021, 9, 124033–124043. [Google Scholar] [CrossRef]
- Wang, J.; Li, G.; Zhao, Z.; Jiao, J.; Ding, S.; Wang, K.; Duan, M. Space Target Anomaly Detection Based on Gaussian Mixture Model and Micro-Doppler Features. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Chen, S.; Luo, F.; Luo, X. Multiview Feature-Based Sea Surface Small Target Detection in Short Observation Time. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1189–1193. [Google Scholar] [CrossRef]
- Qin, J.; Qu, H.; Chen, H.; Chen, W. Joint Detection of Airplane Targets Based on Sar Images and Optical Images. In Proceedings of the IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1366–1369. [Google Scholar] [CrossRef]
- Will, C.; Vaishnav, P.; Chakraborty, A.; Santra, A. Human Target Detection, Tracking, and Classification Using 24-GHz FMCW Radar. IEEE Sensors J. 2019, 19, 7283–7299. [Google Scholar] [CrossRef]
- Mishra, A.K.; Mulgrew, B. Multipolar SAR ATR: Experiments with the GTRI dataset. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Wu, K.; Xu, X. A Fast ISAR Tomography Technique for Fully Polarimetric 3-D Imaging of Man-Made Targets. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Hughes, P. A High-Resolution Radar Detection Strategy. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 663–667. [Google Scholar] [CrossRef]
- Huang, Z.; Pan, Z.; Lei, B. What, Where, and How to Transfer in SAR Target Recognition Based on Deep CNNs. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2324–2336. [Google Scholar] [CrossRef]
- Gretton, A.; Borgwardt, K.M.; Rasch, M.J.; Schölkopf, B.; Smola, A. A kernel two-sample test. J. Mach. Learn. Res. 2012, 13, 723–773. [Google Scholar]
- Mao, D.; Zhang, Y.; Zhang, Y.; Pei, J.; Huang, Y.; Yang, J. An Efficient Anti-Interference Imaging Technology for Marine Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Carretero-Moya, J.; Gismero-Menoyo, J.; Blanco-del Campo, A.; Asensio-Lopez, A. Statistical Analysis of a High-Resolution Sea-Clutter Database. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2024–2037. [Google Scholar] [CrossRef]
- Zhang, Y.; Luo, J.; Li, J.; Mao, D.; Zhang, Y.; Huang, Y.; Yang, J. Fast Inverse-Scattering Reconstruction for Airborne High-Squint Radar Imagery Based on Doppler Centroid Compensation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Data | Testing Data | ||
|---|---|---|---|
| Data composition | Target samples with different SCRs | Clutter samples | Target samples with different SCRs |
| Role in the method | Training AMN | Training OCSVM | Testing the performance |
| Target elevation angles | 27.99° | - | 29.99° |
| Target azimuth angles | 0–360° (interval 4.25°) | - | 0–360° (interval 4.25°) |
| SCRs | −9–10 dB (interval 1 dB) | - | −9–10 dB (interval 1 dB) |
| Monte Carlo times for each SCR | 100 | - | 100 |
| Total | 170,000 a | 168,000 | 170,000 a |
| Case | Training Clutter Distribution | Testing Clutter Distribution |
|---|---|---|
| B_tr_B_te | B | B |
| A_tr_B_te | A | B |
| AB_tr_B_te | A and B | B |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, M.; Zhang, L.; Wang, Y.; Han, C. Polarimetric Range Extended Target Detection via Adaptive Range Weighted Feature Extraction. Remote Sens. 2023, 15, 2929. https://doi.org/10.3390/rs15112929
Yuan M, Zhang L, Wang Y, Han C. Polarimetric Range Extended Target Detection via Adaptive Range Weighted Feature Extraction. Remote Sensing. 2023; 15(11):2929. https://doi.org/10.3390/rs15112929
Chicago/Turabian StyleYuan, Mingchen, Liang Zhang, Yanhua Wang, and Chang Han. 2023. "Polarimetric Range Extended Target Detection via Adaptive Range Weighted Feature Extraction" Remote Sensing 15, no. 11: 2929. https://doi.org/10.3390/rs15112929
APA StyleYuan, M., Zhang, L., Wang, Y., & Han, C. (2023). Polarimetric Range Extended Target Detection via Adaptive Range Weighted Feature Extraction. Remote Sensing, 15(11), 2929. https://doi.org/10.3390/rs15112929