


Slope-Scale Rockfall Susceptibility Modeling as a 3D Computer Vision Problem

 and
and
Abstract
1. Introduction
1.1. Data-Driven Susceptibility Models
1.2. Motivation and Objectives
2. Materials and Methods
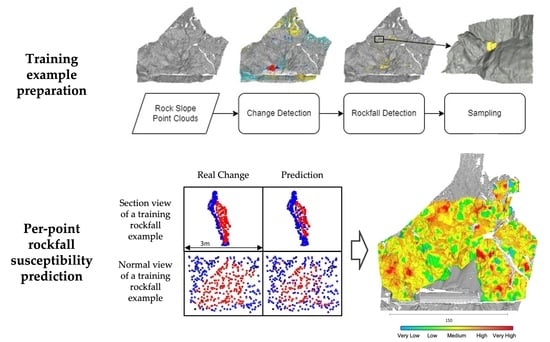
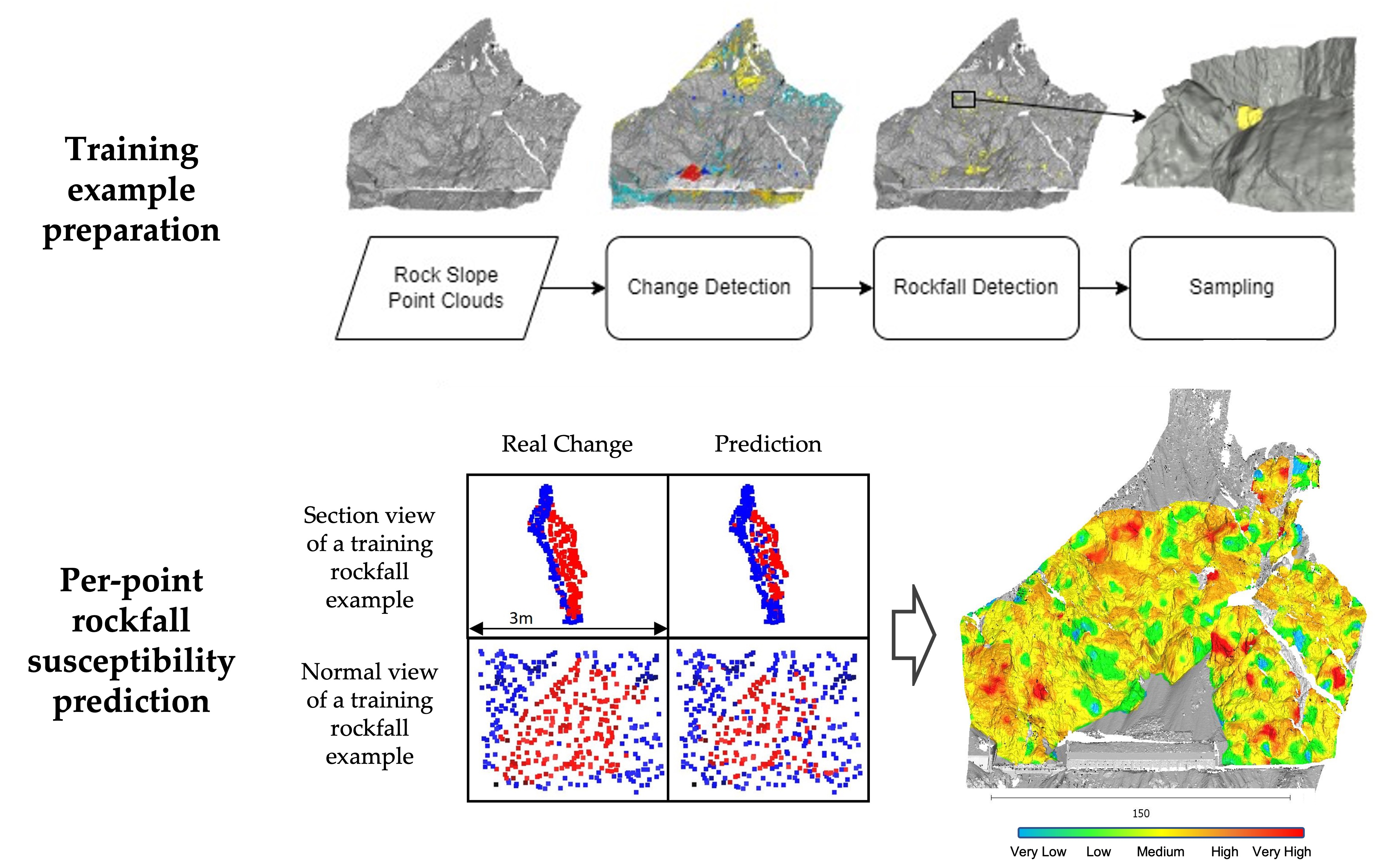
2.1. Conceptualization
2.2. Study Areas and Datasets
2.2.1. Mile 109
2.2.2. White Canyon West
2.2.3. Marsden Bay
2.3. Data Preparation
2.4. Deep Learning Models
2.4.1. Pointwise MLP-Based Learning
2.4.2. Point Convolution-Based Learning
2.4.3. Graph-Based Learning
2.5. Model Development and Evaluation
3. Results
3.1. Quantitative Assessment
3.2. Site-Specific RSM Application
3.2.1. Mile 109
3.2.2. White Canyon West
3.2.3. Marsden Bay
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes Classification of Landslide Types, an Update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Guzzetti, F.; Reichenbach, P.; Cardinali, M.; Galli, M.; Ardizzone, F. Probabilistic Landslide Hazard Assessment at the Basin Scale. Geomorphology 2005, 72, 272–299. [Google Scholar] [CrossRef]
- Reichenbach, P.; Rossi, M.; Malamud, B.D.; Mihir, M.; Guzzetti, F. A Review of Statistically-Based Landslide Susceptibility Models. Earth Sci. Rev. 2018, 180, 60–91. [Google Scholar] [CrossRef]
- Guzzetti, F.; Crosta, G.; Detti, R.; Agliardi, F. STONE: A Computer Program for the Three-Dimensional Simulation of Rock-Falls. Comput. Geosci. 2002, 28, 1079–1093. [Google Scholar] [CrossRef]
- Gallo, I.G.; Martínez-Corbella, M.; Sarro, R.; Iovine, G.; López-Vinielles, J.; Hérnandez, M.; Robustelli, G.; Mateos, R.M.; García-Davalillo, J.C. An Integration of Uav-Based Photogrammetry and 3D Modelling for Rockfall Hazard Assessment: The Cárcavos Case in 2018 (Spain). Remote Sens. 2021, 13, 3450. [Google Scholar] [CrossRef]
- Agliardi, F.; Crosta, G.B. High Resolution Three-Dimensional Numerical Modelling of Rockfalls. Int. J. Rock Mech. Min. Sci. 2003, 40, 455–471. [Google Scholar] [CrossRef]
- Alvioli, M.; Santangelo, M.; Fiorucci, F.; Cardinali, M.; Marchesini, I.; Reichenbach, P.; Rossi, M.; Guzzetti, F.; Peruccacci, S. Rockfall Susceptibility and Network-Ranked Susceptibility along the Italian Railway. Eng. Geol. 2021, 293, 106301. [Google Scholar] [CrossRef]
- Samodra, G.; Chen, G.; Sartohadi, J.; Hadmoko, D.S.; Kasama, K.; Setiawan, M.A. Rockfall Susceptibility Zoning Based on Back Analysis of Rockfall Deposit Inventory in Gunung Kelir, Java. Landslides 2016, 13, 805–819. [Google Scholar] [CrossRef]
- Fell, R.; Corominas, J.; Bonnard, C.; Cascini, L.; Leroi, E.; Savage, W.Z. Guidelines for Landslide Susceptibility, Hazard and Risk Zoning for Land-Use Planning. Eng. Geol. 2008, 102, 99–111. [Google Scholar] [CrossRef]
- Corominas, J.; Copons, R.; Moya, J.; Vilaplana, J.M.; Altimir, J.; Amigó, J. Quantitative Assessment of the Residual Risk in a Rockfall Protected Area. Landslides 2005, 2, 343–357. [Google Scholar] [CrossRef]
- Guzzetti, F.; Carrara, A.; Cardinali, M.; Reichenbach, P. Landslide hazard evaluation: A review of current techniques and their application in a multi-scale study, Central Italy. Geomorphology 1999, 31, 181–216. [Google Scholar] [CrossRef]
- Hungr, O.; Evans, S.G.; Hazzard, J. Magnitude and Frequency of Rock Falls and Rock Slides along the Main Transportation Corridors of Southwestern British Columbia. Can. Geotech. J. 1999, 36, 224–238. [Google Scholar] [CrossRef]
- Lombardo, L.; Tanyas, H.; Huser, R.; Guzzetti, F.; Castro-Camilo, D. Landslide Size Matters: A New Data-Driven, Spatial Prototype. Eng. Geol. 2021, 293, 106288. [Google Scholar] [CrossRef]
- Farmakis, I.; Marinos, V.; Papathanassiou, G.; Karantanellis, E. Automated 3D Jointed Rock Mass Structural Analysis and Characterization Using LiDAR Terrestrial Laser Scanner for Rockfall Susceptibility Assessment: Perissa Area Case (Santorini). Geotech. Geol. Eng. 2020, 38, 3007–3024. [Google Scholar] [CrossRef]
- Wichmann, V.; Strauhal, T.; Fey, C.; Perzlmaier, S. Derivation of Space-Resolved Normal Joint Spacing and in Situ Block Size Distribution Data from Terrestrial LIDAR Point Clouds in a Rugged Alpine Relief (Kühtai, Austria). Bull. Eng. Geol. Environ. 2019, 78, 4465–4478. [Google Scholar] [CrossRef]
- Lato, M.; Diederichs, M.S.; Hutchinson, D.J.; Harrap, R. Optimization of LiDAR Scanning and Processing for Automated Structural Evaluation of Discontinuities in Rockmasses. Int. J. Rock Mech. Min. Sci. 2009, 46, 194–199. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in Landslide Investigations: A Review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Cirillo, D.; Cerritelli, F.; Agostini, S.; Bello, S.; Lavecchia, G.; Brozzetti, F. Integrating Post-Processing Kinematic (PPK)–Structure-from-Motion (SfM) with Unmanned Aerial Vehicle (UAV) Photogrammetry and Digital Field Mapping for Structural Geological Analysis. ISPRS Int. J. Geo-Inf. 2022, 11, 437. [Google Scholar] [CrossRef]
- van Westen, C.J.; Castellanos, E.; Kuriakose, S.L. Spatial Data for Landslide Susceptibility, Hazard, and Vulnerability Assessment: An Overview. Eng. Geol. 2008, 102, 112–131. [Google Scholar] [CrossRef]
- Amato, G.; Eisank, C.; Castro-Camilo, D.; Lombardo, L. Accounting for Covariate Distributions in Slope-Unit-Based Landslide Susceptibility Models. A Case Study in the Alpine Environment. Eng. Geol. 2019, 260, 105237. [Google Scholar] [CrossRef]
- Gudiyangada Nachappa, T.; Kienberger, S.; Meena, S.R.; Hölbling, D.; Blaschke, T. Comparison and Validation of Per-Pixel and Object-Based Approaches for Landslide Susceptibility Mapping. Geomat. Nat. Hazards Risk 2020, 11, 572–600. [Google Scholar] [CrossRef]
- Shirzadi, A.; Saro, L.; Hyun Joo, O.; Chapi, K. A GIS-Based Logistic Regression Model in Rock-Fall Susceptibility Mapping along a Mountainous Road: Salavat Abad Case Study, Kurdistan, Iran. Nat. Hazards 2012, 64, 1639–1656. [Google Scholar] [CrossRef]
- Cignetti, M.; Godone, D.; Bertolo, D.; Paganone, M.; Thuegaz, P.; Giordan, D. Rockfall Susceptibility along the Regional Road Network of Aosta Valley Region (Northwestern Italy). J. Maps 2021, 17, 54–64. [Google Scholar] [CrossRef]
- Losasso, L.; Sdao, F. The Artificial Neural Network for the Rockfall Susceptibility Assessment: A Case Study in Basilicata (Southern Italy). Geomat. Nat. Hazards Risk 2018, 9, 737–759. [Google Scholar] [CrossRef]
- Du, B.; Zhao, Z.; Hu, X.; Wu, G.; Han, L.; Sun, L.; Gao, Q. Landslide Susceptibility Prediction Based on Image Semantic Segmentation. Comput. Geosci. 2021, 155, 104860. [Google Scholar] [CrossRef]
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide Detection from an Open Satellite Imagery and Digital Elevation Model Dataset Using Attention Boosted Convolutional Neural Networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Sala, Z.; Jean Hutchinson, D.; Harrap, R. Simulation of Fragmental Rockfalls Detected Using Terrestrial Laser Scans from Rock Slopes in South-Central British Columbia, Canada. Nat. Hazards Earth Syst. Sci. 2019, 19, 2385–2404. [Google Scholar] [CrossRef]
- Harrap, R.M.; Hutchinson, D.J.; Sala, Z.; Ondercin, M.; Difrancesco, P.M. Our GIS Is a Game Engine: Bringing Unity to Spatial Simulation of Rockfalls. In Proceedings of the GeoComputation 2019, Queenstown, New Zealand, 18–21 September 2019. [Google Scholar]
- DiFrancesco, P.M.; Bonneau, D.; Hutchinson, D.J. The Implications of M3C2 Projection Diameter on 3D Semi-Automated Rockfall Extraction from Sequential Terrestrial Laser Scanning Point Clouds. Remote Sens. 2020, 12, 1885. [Google Scholar] [CrossRef]
- Howard, I.P. Perceiving in DepthVolume 3 Other Mechanisms of Depth Perception; Oxford University Press: Oxford, UK, 2012; ISBN 9780199764167. [Google Scholar]
- Koffka, K. Principles of Gestalt Psychology; Routledge: London, UK, 2013; ISBN 9781136306815. [Google Scholar]
- Xie, Y.; Tian, J.; Zhu, X.X. Linking Points with Labels in 3D: A Review of Point Cloud Semantic Segmentation. IEEE Geosci. Remote Sens. Mag. 2020, 8, 38–59. [Google Scholar] [CrossRef]
- Bengio, J. Deep Learning of Representations for Unsupervised and Transfer Learning. ICML Unsupervised Transf. Learn. 2012, 27, 17–36. [Google Scholar]
- Farmakis, I.; DiFrancesco, P.M.; Hutchinson, D.J.; Vlachopoulos, N. Rockfall Detection Using LiDAR and Deep Learning. Eng. Geol. 2022, 309, 106836. [Google Scholar] [CrossRef]
- Kromer, R.A.; Hutchinson, D.J.; Lato, M.J.; Gauthier, D.; Edwards, T. Identifying Rock Slope Failure Precursors Using LiDAR for Transportation Corridor Hazard Management. Eng. Geol. 2015, 195, 93–103. [Google Scholar] [CrossRef]
- Bonneau, D.A.; Hutchinson, D.J.; McDougall, S. Characterizing Debris Transfer Patterns in the White Canyon, British Columbia with Terrestrial Laser Scanning. In Proceedings of the 7th International Conference on Debris-Flow Hazards Mitigation: Mechanics, Monitoring, Modeling, and Assessment, Golden, CO, USA, 10–13 June 2019; pp. 565–572. [Google Scholar]
- van Veen, M.; Hutchinson, D.J.; Kromer, R.; Lato, M.; Edwards, T. Effects of Sampling Interval on the Frequency-Magnitude Relationship of Rockfalls Detected from Terrestrial Laser Scanning Using Semi-Automated Methods. Landslides 2017, 14, 1579–1592. [Google Scholar] [CrossRef]
- Westoby, M.J.; Lim, M.; Hogg, M.; Pound, M.J.; Dunlop, L.; Woodward, J. Cost-Effective Erosion Monitoring of Coastal Cliffs. Coast. Eng. 2018, 138, 152–164. [Google Scholar] [CrossRef]
- Westoby, M.; Lim, M.; Hogg, M.; Dunlop, L.; Pound, M.; Strzelecki, M.; Woodward, J. Decoding Complex Erosion Responses for the Mitigation of Coastal Rockfall Hazards Using Repeat Terrestrial LiDAR. Remote Sens. 2020, 12, 2620. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4338–4364. [Google Scholar] [CrossRef]
- Qi, C.; Yi, L.; Su, H.; Guibas, L. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. In Proceedings of the NIPS’17—31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5105–5114. [Google Scholar]
- Li, Y.; Bu, R.; Sun, M.; Wu, W.; Di, X.; Chen, B. PointCNN: Convolution on X-Transformed Points. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS 2018), Montreal, QC, Canada, 3–8 December 2018; pp. 820–830. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic Graph CNN for Learning on Point Clouds. ACM Trans. Graph. 2019, 38, 146. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Dataset | AUC | Precision | Recall | IoU | |
|---|---|---|---|---|---|---|
| PointNet++ | Mile 109 | 0.75 | 0.74 | 0.74 | 0.74 | 0.51 |
| WCW | 0.63 | 0.69 | 0.89 | 0.78 | 0.39 | |
| Marsden | 0.62 | 0.57 | 0.25 | 0.35 | 0.40 | |
| PointCNN | Mile 109 | 0.68 | 0.69 | 0.80 | 0.74 | 0.46 |
| WCW | 0.66 | 0.71 | 0.88 | 0.79 | 0.43 | |
| Marsden | 0.70 | 0.60 | 0.50 | 0.54 | 0.48 | |
| DGCNN | Mile 109 | 0.64 | 0.67 | 0.80 | 0.73 | 0.44 |
| WCW | 0.62 | 0.69 | 0.93 | 0.79 | 0.37 | |
| Marsden | 0.58 | 0.45 | 0.10 | 0.17 | 0.33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farmakis, I.; Hutchinson, D.J.; Vlachopoulos, N.; Westoby, M.; Lim, M. Slope-Scale Rockfall Susceptibility Modeling as a 3D Computer Vision Problem. Remote Sens. 2023, 15, 2712. https://doi.org/10.3390/rs15112712
Farmakis I, Hutchinson DJ, Vlachopoulos N, Westoby M, Lim M. Slope-Scale Rockfall Susceptibility Modeling as a 3D Computer Vision Problem. Remote Sensing. 2023; 15(11):2712. https://doi.org/10.3390/rs15112712
Chicago/Turabian StyleFarmakis, Ioannis, D. Jean Hutchinson, Nicholas Vlachopoulos, Matthew Westoby, and Michael Lim. 2023. "Slope-Scale Rockfall Susceptibility Modeling as a 3D Computer Vision Problem" Remote Sensing 15, no. 11: 2712. https://doi.org/10.3390/rs15112712
APA StyleFarmakis, I., Hutchinson, D. J., Vlachopoulos, N., Westoby, M., & Lim, M. (2023). Slope-Scale Rockfall Susceptibility Modeling as a 3D Computer Vision Problem. Remote Sensing, 15(11), 2712. https://doi.org/10.3390/rs15112712