
An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
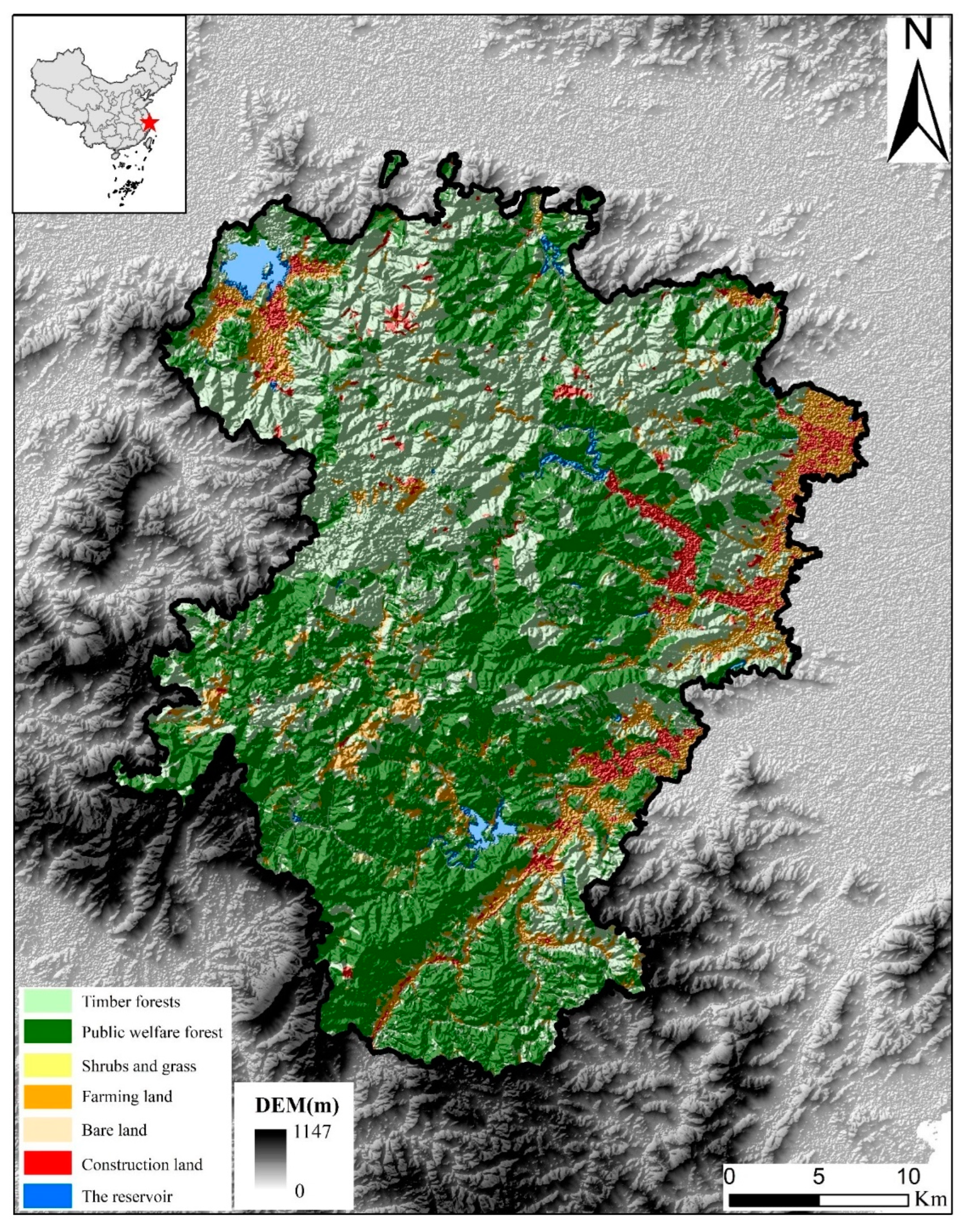
2.1. Study Area
2.2. Multi-Source Spatial Database Development
2.3. The Multi-Source Hybrid Approach
2.3.1. Multi-Estimation Indicator System
2.3.2. Weights Calculation
2.4. Performance Assessment
2.5. Forest Ecological Recovery Assessment Model Based on RF
2.6. The Forest Refines Management Application of the Hybrid Approach
3. Result
3.1. The Performance of the Hybrid Approach
3.1.1. Forest Recovery Mapping
3.1.2. Accuracy Assessment Based on Visual Interpretation
3.1.3. The Relationship between RV and Biodiversity Index
3.2. The RF Correction Model Performance
3.3. The Application of the Hybrid Approach
3.3.1. Spatio-Temporal Refinement Management Applications
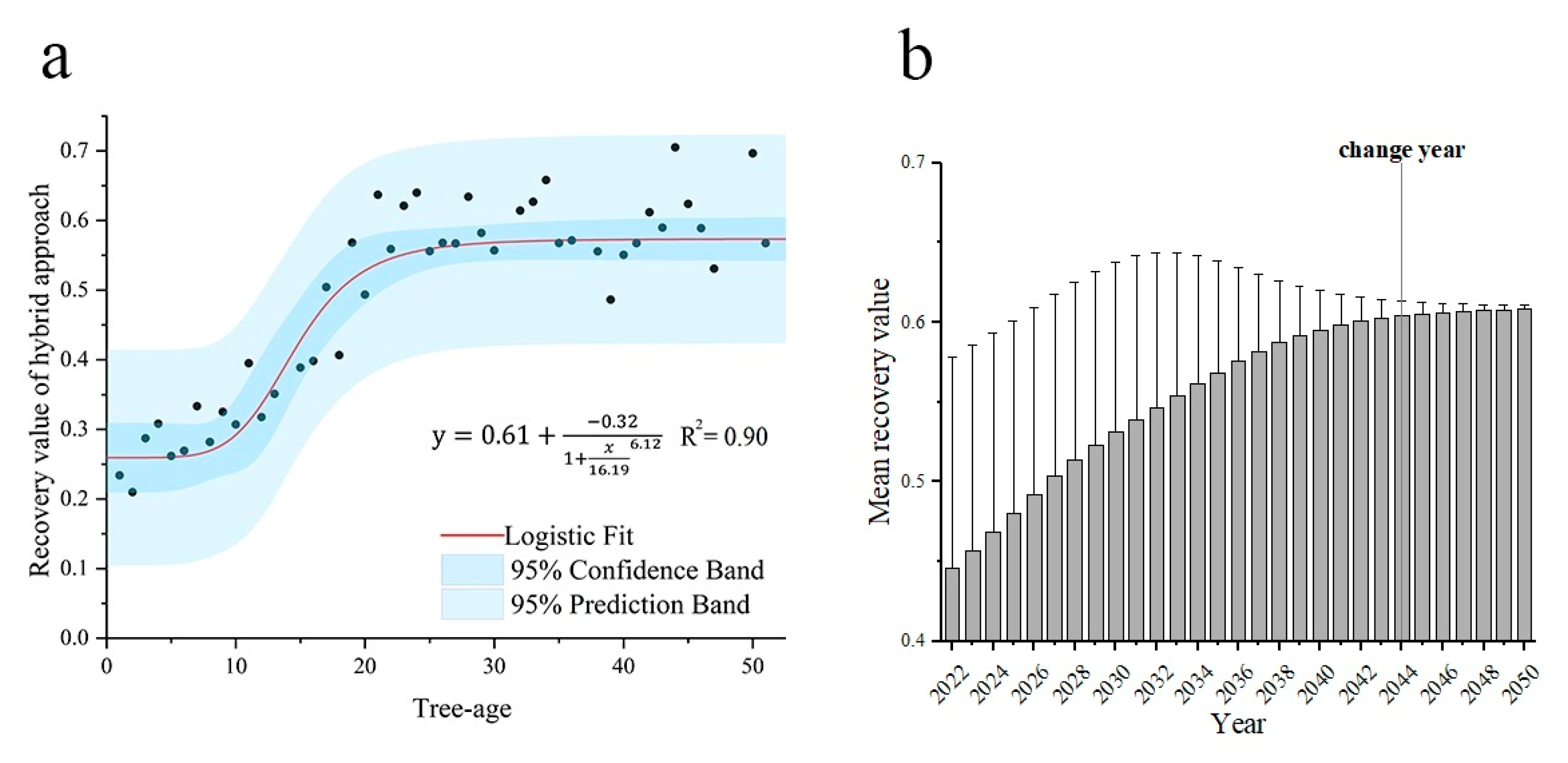
3.3.2. Temporal Refinement Applications
4. Discussion
4.1. The Hybrid Model Accuracy
4.2. Implications of Assessment Results
4.3. Strengths and Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seidl, R.; Thom, D.; Kautz, M.; Martin-Benito, D.; Peltoniemi, M.; Vacchiano, G.; Wild, J.; Ascoli, D.; Petr, M.; Honkaniemi, J.; et al. Forest disturbances under climate change. Nat. Clim. Chang. 2017, 7, 395–402. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- National Greening Committee of China. Outline of the National Land Greening Plan (2022–2030). Available online: http://www.forestry.gov.cn/main/586/20220910/120737578312352.html (accessed on 10 September 2022).
- Oliver, T.H.; Heard, M.S.; Isaac, N.J.B.; Roy, D.B.; Procter, D.; Eigenbrod, F.; Freckleton, R.; Hector, A.; Orme, C.D.L.; Petchey, O.L.; et al. Biodiversity and Resilience of Ecosystem Functions. Trends Ecol. Evol. 2015, 30, 673–684. [Google Scholar] [CrossRef] [PubMed]
- Lamb, D.; Stanturf, J.; Madsen, P. Palle Madsen What is forest landscape restoration? For. Landsc. Restor. 2012, 15, 3–23. [Google Scholar] [CrossRef]
- Stanturf, J.A.; Palik, B.J.; Dumroese, R.K. Contemporary forest restoration: A review emphasizing function. For. Ecol. Manag. 2014, 331, 292–323. [Google Scholar] [CrossRef]
- Castro, J.; Morales-Rueda, F.; Navarro, F.B.; Lof, M.; Vacchiano, G.; Alcaraz-Segura, D. Precision restoration: A necessary approach to foster forest recovery in the 21st century. Restor. Ecol. 2021, 29, e13421. [Google Scholar] [CrossRef]
- Smith, W.B. Forest inventory and analysis: A national inventory and monitoring program. Environ. Pollut. 2002, 116, S233–S242. [Google Scholar] [CrossRef]
- Lechner, A.M.; Foody, G.M.; Boyd, D.S. Applications in Remote Sensing to Forest Ecology and Management. One Earth 2020, 2, 405–412. [Google Scholar] [CrossRef]
- Frolking, S.; Palace, M.W.; Clark, D.B.; Chambers, J.Q.; Shugart, H.H.; Hurtt, G.C. Forest disturbance and recovery: A general review in the context of spaceborne remote sensing of impacts on aboveground biomass and canopy structure. J. Geophys. Res.-Biogeosci. 2009, 114, G00E02. [Google Scholar] [CrossRef]
- Camarretta, N.; Harrison, P.A.; Bailey, T.; Potts, B.; Lucieer, A.; Davidson, N.; Hunt, M. Monitoring forest structure to guide adaptive management of forest restoration: A review of remote sensing approaches. New For. 2020, 51, 573–596. [Google Scholar] [CrossRef]
- Vancutsem, C.; Achard, F.; Pekel, J.F.; Vieilledent, G.; Carboni, S.; Simonetti, D.; Gallego, J.; Aragao, L.E.O.C.; Nasi, R. Long-term (1990–2019) monitoring of forest cover changes in the humid tropics. Sci. Adv. 2021, 7, eabe1603. [Google Scholar] [CrossRef] [PubMed]
- Masek, J.G.; Huang, C.; Wolfe, R.; Cohen, W.; Hall, F.; Kutler, J.; Nelson, P. North American forest disturbance mapped from a decadal Landsat record. Remote Sens. Environ. 2008, 112, 2914–2926. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ. 2007, 110, 370–386. [Google Scholar] [CrossRef]
- Zhu, Z.; Fu, Y.; Woodcock, C.E.; Olofsson, P.; Vogelmann, J.E.; Holden, C.; Wang, M.; Dai, S.; Yu, Y. Including land cover change in analysis of greenness trends using all available Landsat 5, 7, and 8 images: A case study from Guangzhou, China (2000-2014). Remote Sens. Environ. 2016, 185, 243–257. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Gallant, A.L.; Shi, H.; Zhu, Z. Perspectives on monitoring gradual change across the continuity of Landsat sensors using time-series data. Remote Sens. Environ. 2016, 185, 258–270. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Franklin, S.E.; Wulder, M.A. Interpretation of forest disturbance using a time series of Landsat imagery and canopy structure from airborne lidar. Can. J. Remote Sens. 2014, 39, 521–542. [Google Scholar] [CrossRef]
- Knudby, A.; Newman, C.; Shaghude, Y.; Muhando, C. Simple and effective monitoring of historic changes in nearshore environments using the free archive of Landsat imagery. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, S116–S122. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Bullock, E.L.; Woodcock, C.E.; Souza, C., Jr.; Olofsson, P. Satellite-based estimates reveal widespread forest degradation in the Amazon. Glob. Chang. Biol. 2020, 26, 2956–2969. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Gorelick, N.; Braaten, J.; Cavalcante, L.; Cohen, W.B.; Healey, S. Implementation of the LandTrendr Algorithm on Google Earth Engine. Remote Sens. 2018, 10, 691. [Google Scholar] [CrossRef]
- Wang, Y.; Ziv, G.; Adami, M.; Mitchard, E.; Batterman, S.A.; Buermann, W.; Marimon, B.S.; Marimon Junior, B.H.; Reis, S.M.; Rodrigues, D.; et al. Mapping tropical disturbed forests using multi-decadal 30 m optical satellite imagery. Remote Sens. Environ. 2019, 221, 474–488. [Google Scholar] [CrossRef]
- Reygadas, Y.; Spera, S.; Galati, V.; Salisbury, D.S.; Silva, S.; Novoa, S. Mapping forest disturbances across the Southwestern Amazon: Tradeoffs between open-source, Landsat-based algorithms. Environ. Res. Commun. 2021, 3, 091001. [Google Scholar] [CrossRef]
- Meng, Y.; Liu, X.; Wang, Z.; Ding, C.; Zhu, L. How can spatial structural metrics improve the accuracy of forest disturbance and recovery detection using dense Landsat time series? Ecol. Indic. 2021, 132, 108336. [Google Scholar] [CrossRef]
- Bolton, D.K.; Coops, N.C.; Wulder, M.A. Characterizing residual structure and forest recovery following high-severity fire in the western boreal of Canada using Landsat time-series and airborne lidar data. Remote Sens. Environ. 2015, 163, 48–60. [Google Scholar] [CrossRef]
- Scheffer, M.; Carpenter, S.R.; Dakos, V.; van Nes, E.H. Generic Indicators of Ecological Resilience: Inferring the Chance of a Critical Transition. Annu. Rev. Ecol. Evol. Syst. 2015, 46, 145–167. [Google Scholar] [CrossRef]
- Oettel, J.; Lapin, K. Linking forest management and biodiversity indicators to strengthen sustainable forest management in Europe. Ecol. Indic. 2021, 122, 107275. [Google Scholar] [CrossRef]
- Dobor, L.; Hlasny, T.; Rammer, W.; Barka, I.; Trombik, J.; Pavlenda, P.; Seben, V.; Stepanek, P.; Seidl, R. Post-disturbance recovery of forest carbon in a temperate forest landscape under climate change. Agric. For. Meteorol. 2018, 263, 308–322. [Google Scholar] [CrossRef]
- McLachlan, S.M.; Bazely, D.R. Recovery patterns of understory herbs and their use as indicators of deciduous forest regeneration. Conserv. Biol. 2001, 15, 98–110. [Google Scholar] [CrossRef]
- Bartels, S.F.; Chen, H.Y.H.; Wulder, M.A.; White, J.C. Trends in post-disturbance recovery rates of Canada’s forests following wildfire and harvest. For. Ecol. Manag. 2016, 361, 194–207. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Johnson, K.D.; Birdsey, R.; Cole, J.; Swatantran, A.; O’Neil-Dunne, J.; Dubayah, R.; Lister, A. Integrating LIDAR and forest inventories to fill the trees outside forests data gap. Environ. Monit. Assess. 2015, 187, 623. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B.; Pfaff, E.; Braaten, J.; Nelson, P. Spatial and temporal patterns of forest disturbance and regrowth within the area of the Northwest Forest Plan. Remote Sens. Environ. 2012, 122, 117–133. [Google Scholar] [CrossRef]
- de Avila, A.L.; van der Sande, M.T.; Dormann, C.F.; Pena-Claros, M.; Poorter, L.; Mazzei, L.; Ruschel, A.R.; Silva, J.N.M.; de Carvalho, J.O.P.; Bauhus, J. Disturbance intensity is a stronger driver of biomass recovery than remaining tree-community attributes in a managed Amazonian forest. J. Appl. Ecol. 2018, 55, 1647–1657. [Google Scholar] [CrossRef]
- Do, H.T.T.; Grant, J.C.; Ngoc Bon, T.; Zimmer, H.C.; Lam Dong, T.; Nichols, J.D. Recovery of tropical moist deciduous dipterocarp forest in Southern Vietnam. For. Ecol. Manag. 2019, 433, 184–204. [Google Scholar] [CrossRef]
- Villa, P.M.; Martins, S.V.; de Oliveira Neto, S.N.; Rodrigues, A.C.; Hissa Safar, N.V.; Monsanto, L.D.; Cancio, N.M.; Ali, A. Woody species diversity as an indicator of the forest recovery after shifting cultivation disturbance in the northern Amazon. Ecol. Indic. 2018, 95, 687–694. [Google Scholar] [CrossRef]
- Spasojevic, M.J.; Bahlai, C.A.; Bradley, B.A.; Butterfield, B.J.; Tuanmu, M.-N.; Sistla, S.; Wiederholt, R.; Suding, K.N. Scaling up the diversity-resilience relationship with traitdatabases and remote sensing data: The recovery ofproductivity after wildfire. Glob. Chang. Biol. 2016, 22, 1421–1432. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Deng, L.-Y.; Zuo, S.-D.; Song, X.-D.; Liao, Y.-L.; Xu, C.-D.; Chen, Q.; Hua, L.-Z.; Li, Z.-W. Quantifying the influences of various ecological factors on land surface temperature of urban forests. Environ. Pollut. 2016, 216, 519–529. [Google Scholar] [CrossRef] [PubMed]
- Zuo, S.-D.; Ren, Y.; Weng, X.; Ding, H.; Luo, Y. Biomass allometric equations of nine common tree species in an evergreen broadleaved forestof subtropical China. Chin. J. Appl. Ecol. 2015, 26, 356–362. [Google Scholar] [CrossRef]
- Chen, C.-H. A Novel Multi-Criteria Decision-Making Model for Building Material Supplier Selection Based on Entropy-AHP Weighted TOPSIS. Entropy 2020, 22, 259. [Google Scholar] [CrossRef]
- Meng, Y.; Cao, B.; Dong, C.; Dong, X. Mount Taishan forest ecosystem health assessment based on forest inventory data. Forests 2019, 10, 657. [Google Scholar] [CrossRef]
- Saaty, T.L. Relative Measurement and Its Generalization in Decision Making Why Pairwise Comparisons are Central in Mathematics for the Measurement of Intangible Factors The Analytic Hierarchy/Network Process (To the Memory of my Beloved Friend Professor Sixto Rios Garcia). Rev. De La Real Acad. De Cienc. Exactas Fis. Y Nat. Ser. A-Mat. 2008, 102, 251–318. [Google Scholar] [CrossRef]
- Liu, L.; Zhou, J.; An, X.; Zhang, Y.; Yang, L. Using fuzzy theory and information entropy for water quality assessment in Three Gorges region, China. Expert Syst. Appl. 2010, 37, 2517–2521. [Google Scholar] [CrossRef]
- Wagle, N.; Acharya, T.D.; Kolluru, V.; Huang, H.; Lee, D.H. Multi-Temporal Land Cover Change Mapping Using Google Earth Engine and Ensemble Learning Methods. Appl. Sci. 2020, 10, 8083. [Google Scholar] [CrossRef]
- Torras, O.; Saura, S. Effects of silvicultural treatments on forest biodiversity indicators in the Mediterranean. For. Ecol. Manag. 2008, 255, 3322–3330. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. Isprs J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; Kennedy, R.E.; Braaten, J.D.; Henareh Khalyani, A. Examining post-fire vegetation recovery with Landsat time series analysis in three western North American forest types. Fire Ecol. 2019, 15, 8. [Google Scholar] [CrossRef]
- Ahmed, O.S.; Franklin, S.E.; Wulder, M.A.; White, J.C. Characterizing stand-level forest canopy cover and height using Landsat time series, samples of airborne LiDAR, and the Random Forest algorithm. Isprs J. Photogramm. Remote Sens. 2015, 101, 89–101. [Google Scholar] [CrossRef]
- Powell, S.L.; Cohen, W.B.; Yang, Z.; Pierce, J.D.; Alberti, M. Quantification of impervious surface in the Snohomish Water Resources Inventory Area of Western Washington from 1972-2006. Remote Sens. Environ. 2008, 112, 1895–1908. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Cohen, W.B.; Kennedy, R.E. Using Landsat-derived disturbance history (1972-2010) to predict current forest structure. Remote Sens. Environ. 2012, 122, 146–165. [Google Scholar] [CrossRef]
- Chen, C.; Bu, J.; Zhang, Y.; Zhuang, Y.; Chu, Y.; Hu, J.; Guo, B. The application of the tasseled cap transformation and feature knowledge for the extraction of coastline information from remote sensing images. Adv. Space Res. 2019, 64, 1780–1791. [Google Scholar] [CrossRef]
- Baig, M.H.A.; Zhang, L.; Shuai, T.; Tong, Q. Derivation of a tasselled cap transformation based on Landsat 8 at-satellite reflectance. Remote Sens. Lett. 2014, 5, 423–431. [Google Scholar] [CrossRef]
- Crist, E.P.; Cicone, R.C. A physically-based transformation of thematic mapper data—The TM tasseled cap. IEEE Trans. Geosci. Remote Sens. 1984, 22, 256–263. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Piao, S.; Mohammat, A.; Fang, J.; Cai, Q.; Feng, J. NDVI-based increase in growth of temperate grasslands and its responses to climate changes in China. Glob. Environ. Chang.-Hum. Policy Dimens. 2006, 16, 340–348. [Google Scholar] [CrossRef]
- Chen, W.H.; Liu, L.Y.; Zhang, C.; Wang, J.H.; Wang, J.D.; Pan, Y.C. Monitoring the seasonal bare soil areas in Beijing using multi-temporal TM images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, 20–24 September 2004; IEEE: New York, NY, USA; pp. 3379–3382.
- White, J.C.; Wulder, M.A.; Hermosilla, T.; Coops, N.C.; Hobart, G.W. A nationwide annual characterization of 25 years of forest disturbance and recovery for Canada using Landsat time series. Remote Sens. Environ. 2017, 194, 303–321. [Google Scholar] [CrossRef]
- Cohen, W.B.; Yang, Z.; Heale, S.P.; Kennedy, R.E.; Gorelic, N. A LandTrendr multispectral ensemble for forest disturbance detection. Remote Sens. Environ. 2018, 205, 131–140. [Google Scholar] [CrossRef]
- Zhao, F.R.; Meng, R.; Huang, C.; Zhao, M.; Zhao, F.A.; Gong, P.; Yu, L.; Zhu, Z. Long-Term Post-Disturbance Forest Recovery in the Greater Yellowstone Ecosystem Analyzed Using Landsat Time Series Stack. Remote Sens. 2016, 8, 898. [Google Scholar] [CrossRef]
- Gamfeldt, L.; Snall, T.; Bagchi, R.; Jonsson, M.; Gustafsson, L.; Kjellander, P.; Ruiz-Jaen, M.C.; Froberg, M.; Stendahl, J.; Philipson, C.D.; et al. Higher levels of multiple ecosystem services are found in forests with more tree species. Nat. Commun. 2013, 4, 1340. [Google Scholar] [CrossRef]
- Mori, A.S.; Lertzman, K.P.; Gustafsson, L. Biodiversity and ecosystem services in forest ecosystems: A research agenda for applied forest ecology. J. Appl. Ecol. 2017, 54, 12–27. [Google Scholar] [CrossRef]
- Khosravi Mashizi, A.; Sharafatmandrad, M. Assessing the effects of shrubs on ecosystem functions in arid sand dune ecosystems. Arid Land Res. Manag. 2020, 34, 171–187. [Google Scholar] [CrossRef]
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A new paradigm in a changing world and climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef] [PubMed]
- Cosenza, D.N.; Vogel, J.; Broadbent, E.N.; Silva, C.A. Silvicultural experiment assessment using lidar data collected from an unmanned aerial vehicle. For. Ecol. Manag. 2022, 522, 120489. [Google Scholar] [CrossRef]
- Luo, H.; Zhou, T.; Yu, P.; Yi, C.; Liu, X.; Zhang, Y.; Zhou, P.; Zhang, J.; Xu, Y. The forest recovery path after drought dependence on forest type and stock volume. Environ. Res. Lett. 2022, 17, 055006. [Google Scholar] [CrossRef]
- Senf, C.; Mueller, J.; Seidl, R. Post-disturbance recovery of forest cover and tree height differ with management in Central Europe. Landsc. Ecol. 2019, 34, 2837–2850. [Google Scholar] [CrossRef]
- Pickell, P.D.; Hermosilla, T.; Frazier, R.J.; Coops, N.C.; Wulder, M.A. Forest recovery trends derived from Landsat time series for North American boreal forests. Int. J. Remote Sens. 2016, 37, 138–149. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criterion Layer | Indicator Layer (±) | Data Source | Units | AHP Weight | Entropy Weight | Combination Weight |
|---|---|---|---|---|---|---|
| Spectrum | NBR (+) | Landsat | / | 0.030 | 0.016 | 0.023 |
| Structure | Tree height (+) | Airborne LiDAR | m | 0.141 | 0.143 | 0.142 |
| Canopy density (+) | Airborne LiDAR | / | 0.080 | 0.130 | 0.105 | |
| Habitat | Naturalness (+) | LFMI | / | 0.229 | 0.273 | 0.251 |
| Function | Community structure type (+) | LFMI | / | 0.432 | 0.164 | 0.298 |
| Above-ground biomass (+) | LFMI | t/ha | 0.088 | 0.274 | 0.181 |
| Dependent Variable | Independent Variable | Equation | References | Data Sources |
|---|---|---|---|---|
| RV | Disturbance Index (DI) | DI = Br − (Gr + Wr) Br is the normalised tassel cap brightness. Gr and Wr is greenness and humidity. | [13] | Landsat |
| Tasseled Cap Angle (TCA) | Landsat5: TCB = 0.3037(Blue) − 0.2793(Green) − 0.4743(Red) + 0.5585(NIR) − 0.5082(SWIR1) − 0.1863(SWIR2) Landsat8: TCB = 0.0528(Blue) − 0.1153(Green) − 0.2225(Red) + 0.3372(NIR) − 0.6440(SWIR1) − 0.6364(SWIR2) | [50] [51,52,53,54] | ||
| Simple ratio vegetation index (SR) | SR = NIR/R | [55] | ||
| swir2 | / | / | ||
| Normalized Difference Vegetation Index (NDVI) | NDVI = | [56] | ||
| Tasseled Cap Wetness (TCW) | Landsat5: TCW = 0.0.1509(Blue) + 0.1973(Green) + 0.3279(Red) + 0.3406(NIR) − 0.7112(SWIR1) − 0.4572(SWIR2) Landsat8: TCW = 0.2311(Blue) + 0.1700(Green) + 0.1048(Red) − 0.4790(NIR) − 0.5847(SWIR1) − 0.5142(SWIR2) | [51,52,53,54] | ||
| Tasseled Cap Greenness (TCG) | Landsat5: TCG =− 0.2848(Blue) − 0.2435(Green) − 0.54363(Red) + 0.7243(NIR) − 0.0840(SWIR1) − 0.1800(SWIR2) Landsat8: TCG = −0.2056(Blue) − 0.2319(Green) − 0.3802(Red) + 0.8246(NIR) − 0.0102(SWIR1) − 0.2264(SWIR2) | |||
| Bare soil index (BI) | [57] | |||
| Red | / | / | ||
| Elevation | / | / | LFMI | |
| Slope | / | / | ||
| Age of tree | / | / |
| Validation Samples | Pixel Number in RV Value Ranges | Total Pixel Number | Production Accuracy (PA) | Overall Accuracy (OA) | Kappa Coefficient | |||
|---|---|---|---|---|---|---|---|---|
| (0–0.33] | (0.33–0.66] | (0.66–1.67] | ||||||
| Hybrid approach | Initial restorative forest | 1779 | 83 | 24 | 1886 | 0.94 | 0.94 | 0.89 |
| Middle restorative forest | 10 | 341 | 1 | 352 | 0.97 | |||
| Restored forest | 32 | 72 | 1380 | 1484 | 0.93 | |||
| Total | 1821 | 496 | 1405 | 3722 | ||||
| User accuracy (UA) | 0.98 | 0.69 | 0.98 | |||||
| Random forest algorithm | Initial restorative forest | 1704 | 182 | 0 | 1886 | 0.90 | 0.77 | 0.64 |
| Middle restorative forest | 34 | 309 | 9 | 352 | 0.88 | |||
| Restored forest | 76 | 538 | 870 | 1484 | 0.59 | |||
| Total | 1814 | 1029 | 879 | 3722 | ||||
| User accuracy (UA) | 0.94 | 0.30 | 0.99 | |||||
| Year | Loss Area of Forest (ha) | Year | Loss Area of Forest (ha) |
|---|---|---|---|
| 2001 | 166.21 | 2012 | 441.00 |
| 2002 | 23.40 | 2013 | 225.45 |
| 2003 | 154.70 | 2014 | 131.76 |
| 2004 | 123.66 | 2015 | 114.03 |
| 2005 | 204.75 | 2016 | 83.79 |
| 2006 | 97.56 | 2017 | 83.70 |
| 2007 | 162.24 | 2018 | 48.24 |
| 2008 | 93.51 | 2019 | 109.08 |
| 2009 | 157.23 | 2020 | 183.60 |
| 2010 | 243.72 | 2021 | 164.34 |
| 2011 | 460.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Zuo, S.; Su, Y.; Zheng, X.; Wang, W.; Chen, K.; Ren, Y. An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection. Remote Sens. 2023, 15, 2667. https://doi.org/10.3390/rs15102667
Li M, Zuo S, Su Y, Zheng X, Wang W, Chen K, Ren Y. An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection. Remote Sensing. 2023; 15(10):2667. https://doi.org/10.3390/rs15102667
Chicago/Turabian StyleLi, Mei, Shudi Zuo, Ying Su, Xiaoman Zheng, Weibing Wang, Kaichao Chen, and Yin Ren. 2023. "An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection" Remote Sensing 15, no. 10: 2667. https://doi.org/10.3390/rs15102667
APA StyleLi, M., Zuo, S., Su, Y., Zheng, X., Wang, W., Chen, K., & Ren, Y. (2023). An Approach Integrating Multi-Source Data with LandTrendr Algorithm for Refining Forest Recovery Detection. Remote Sensing, 15(10), 2667. https://doi.org/10.3390/rs15102667