1. Introduction
China began to build BeiDou Navigation Satellite System (BDS) at the end of the 20th century according to the three-step development strategies [
1]. As planned, the first-generation BDS (BDS-1), the second-generation BDS (BDS-2), and the third-generation BDS (BDS-3) were completed successively in 2003, 2012, and 2020, with the corresponding satellite constellations of 3 Geostationary Orbit (GEO) satellites, 5 GEO satellites+5 IGSO (Inclined Geosynchronous Orbit) satellites+4 MEO (Medium Earth Orbit) satellites, and 3 GEO+3 IGSO+24 MEO satellites, respectively. Currently, the global Positioning, Navigation, and Timing (PNT) services of BDS are supported by signals on frequencies B1I (1561.098 MHz), B2I (1207.14 MHz), B3I (1268.52 MHz), B1C (1575.42 MHz), B2a (1176.45 MHz), and B2b (1207.14 MHz) [
2,
3,
4,
5,
6,
7]. Among these services, the Precise Point Positioning (PPP)-B2b enhancement service is of great significance, and also it is considered to be the core support for smart city development in China.
PPP, which was proposed by Zumberger et al. [
8] in 1997, is the favored technology for high-accuracy positioning applications. The corresponding model was furtherly developed in the works [
8,
9,
10]. PPP can provide an accurate positioning solution using only a single GNSS receiver by utilizing precise satellite products with about two weeks delay [
11,
12,
13]. Consequently, PPP is mainly for applications in post-processing currently [
14,
15]. To satisfy the demands of real-time PPP, BDS-3 transmits the orbit/clock corrections of broadcast ephemeris by B2b signal [
16,
17,
18,
19]. Multi-GNSS Experiment (MGEX)/iGMAS stations were adopted in [
17] to verify the real-time PPP positioning performance using PPP-B2b service in static and simulated-kinematic modes by comparing with the solutions based on Geodetic Benchmark (GBM) final products. It is shown that the positioning performance of real-time PPP is slightly worse than the post-processing PPP in general, according to the statistical results. However, the convergence time of real-time PPP is slightly shorter for the BDS-only in a static model. Tao et al. [
16] compared PPP-B2b service with Real-Time Service (RTS) provided by Centre National d’Etudes Spatiales (CNES). Based on the analysis from six stations distributed in China, the positioning accuracy of BDS-3-only PPP with PPP-B2b service in kinematic mode can achieve decimeter-level positioning results, which is consistent with the accuracy of GPS PPP using products of CNES.
However, such a PPP-B2b service-based PPP cannot maintain positioning accuracy and continuity in urban environments [
20,
21], such as under bridges or trees, etc. In order to overcome the shortcomings of PPP in those circumstances, an Inertial Navigation System (INS) is integrated. INS is capable of providing position, velocity, and attitude results by using measurements from Inertial Measurement Units (IMU) without external observations. However, the position errors of INS will accumulate rapidly over time [
22,
23]. Meanwhile, integrating PPP and INS can estimate and compensate IMU errors to restrain the divergence [
20,
22,
24]. According to previous works, more reliable position results can be obtained by PPP/INS [
20,
21,
25,
26,
27,
28,
29].
Le et al. [
25] investigated the Loosely Coupled Integration (LCI) of Single Frequency (SF) PPP/INS, which was validated by a flight experiment. Results showed that the SF-PPP-only positioning performance is visibly improved in the horizontal and vertical components. LCI mode cannot work when there are not enough GNSS observations. Martell in [
26] further applied the Tightly Coupled Integration (TCI) of PPP and INS using different grade IMUs and different cut-off satellite angles. The results showed that reliable results could be obtained even if the number of satellites is less than 4. In [
27], TCI was compared with LCI by using a tactical-grade IMU to illustrate the benefits of TCI. The position differences of TCI are within 1.0 m, and such errors of LCI are within 5.0 m. The studies above are mainly based on undifferenced GNSS observations. The Dual Frequency (DF) PPP/INS integration using Single-Difference Between-Satellites (BSSD) GPS observations was applied in [
28]. During the simulated outages of 10 s~30 s, the position accuracy of BSSD PPP/INS TCI can be decimeter-level. Such accuracy is higher than those using undifferenced observations. Owing to the evolution of multi-constellation GNSS (multi-GNSS), more available observations can be adopted to enhance the integration performance. Gao et al. [
21] developed the multi-constellation (GLONASS, BDS, and GPS) TCI of SF PPP/INS, and it was verified by a set of land-borne experiment data. Results showed that significant positum improvements in terms of accuracy, continuity, and reliability could be obtained by INS aiding. Anyway, the performance of conventional GPS SF-PPP can be improved by utilizing the multi-GNSS observation. The enhancement of multi-GNSS on PPP/INS is also illustrated in [
29]. According to the results, the positioning and convergence performance of PPP is enhanced significantly by multi-GNSS and INS. However, such impacts in terms of velocity and attitude are invisible.
Based on the works in [
20,
21,
22,
23,
24,
25,
26,
27,
28,
29], continuous solutions with high accuracy can be provided by the PPP/INS integration during GNSS outages. However, the positioning errors of PPP/INS still accumulate rapidly, especially for a low-cost IMU when the GNSS signal seriously deteriorates, even interrupts completely around high buildings or under tunnels [
30,
31]. Such a circumstance can be facilitated by using the velocity information from an odometer. In [
31], GPS + GLONASS DF-PPP was integrated with INS and odometer, and simulated GNSS outages were utilized to evaluate the performance in challenging circumstances. According to the results, the position accuracy was furtherly ameliorated by the odometer.
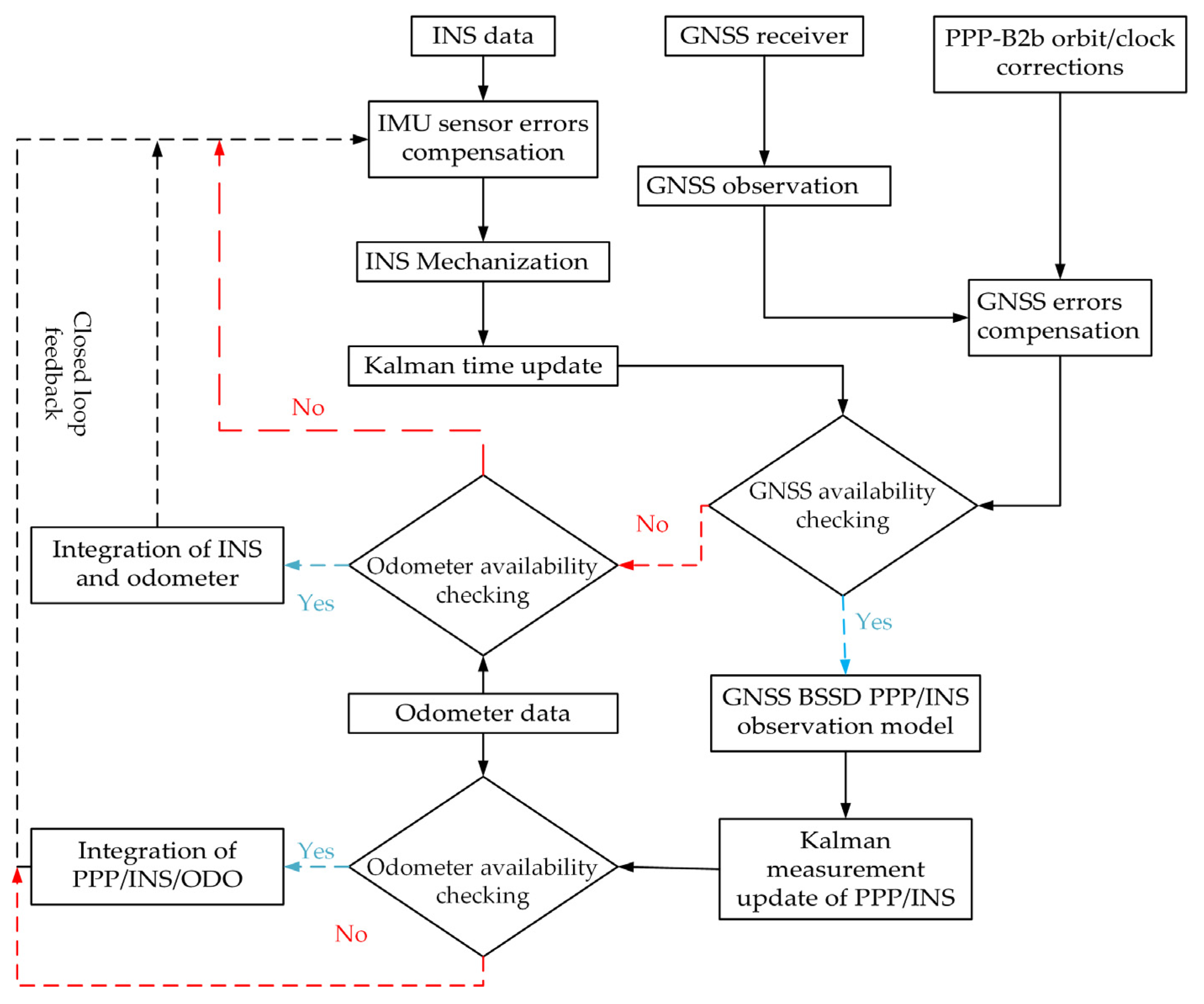
In this paper, we implied PPP/INS/odometer tightly coupled integration model. In comparison with previous works, the contribution of this paper is that such a tightly coupled integration is based on the BSSD model and the BDS-3 PPP-B2b orbit/clock corrections. In order to assess the performance of this algorithm, vehicle-borne data acquired in urban environments are processed and analyzed. The enhancements of a low-cost INS, BSSD BDS-3 PPP model, and an odometer on positioning and attitude determination are discussed in detail.
4. Discussion
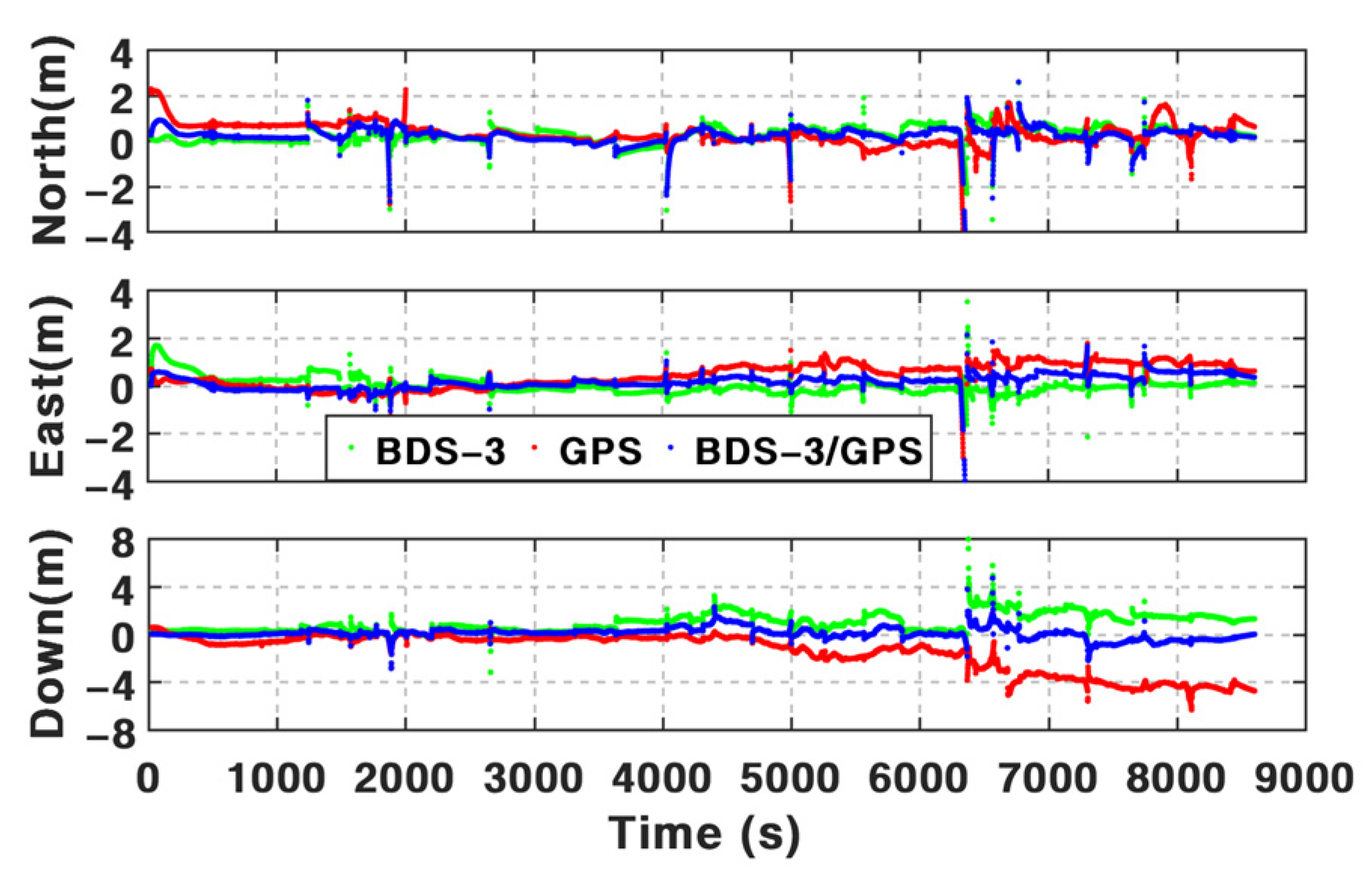
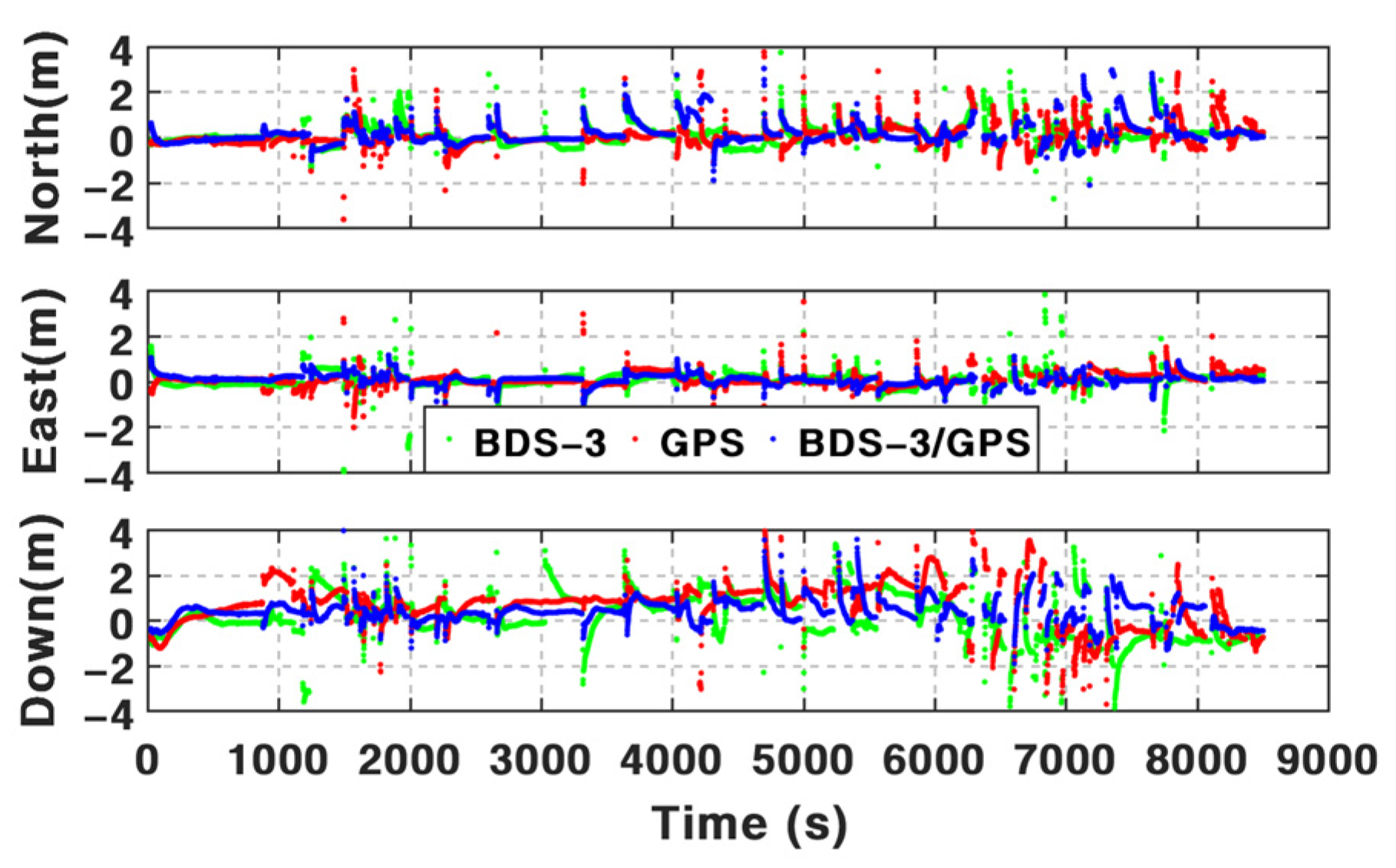
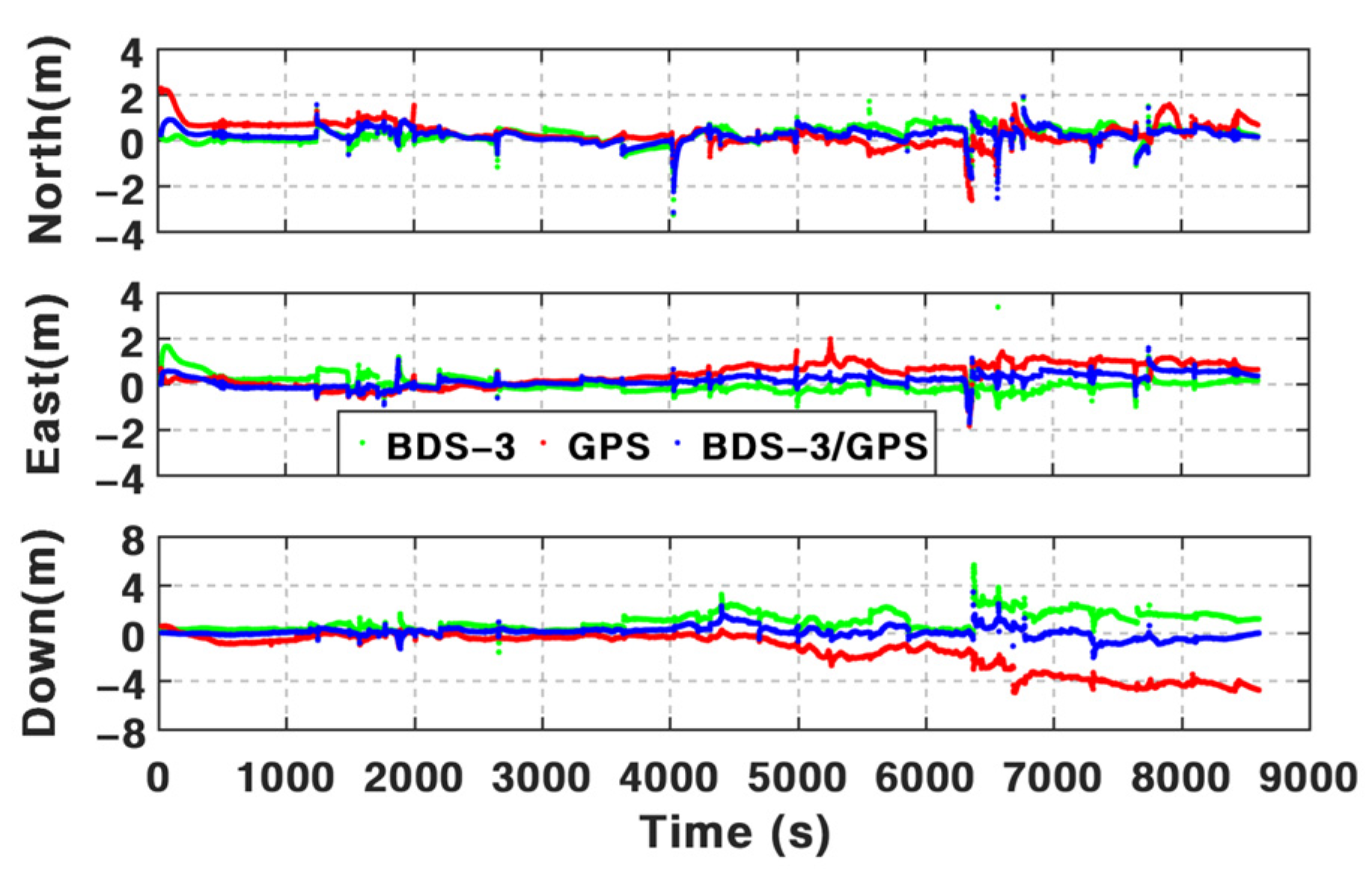
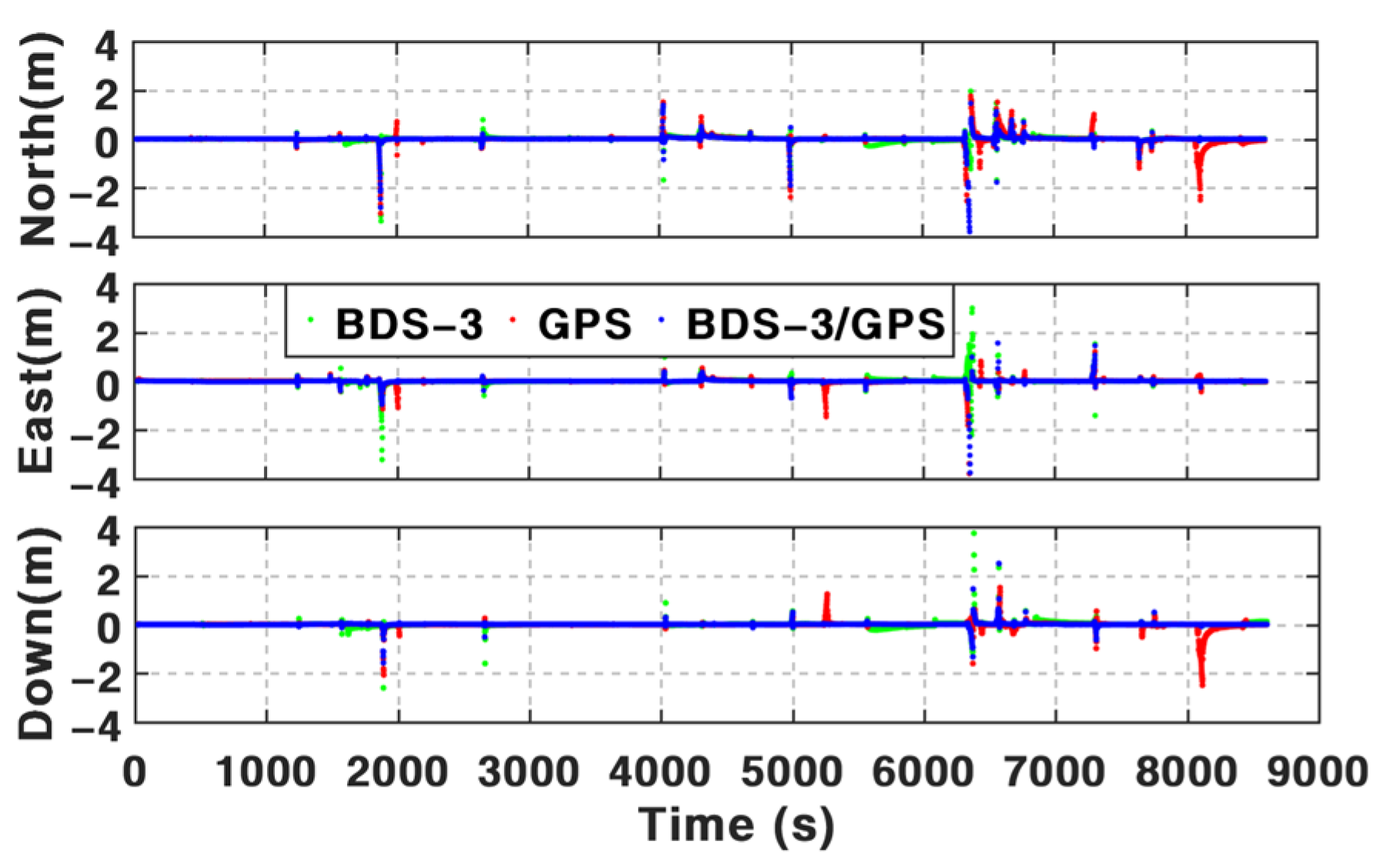
Based on the BDS-3 PPP-B2b service, real-time PPP can be used via B2b signals. However, it is still challenging in an urban environment. According to the assessments above and the results summarized in
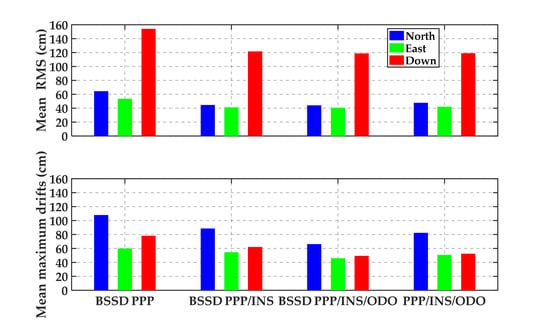
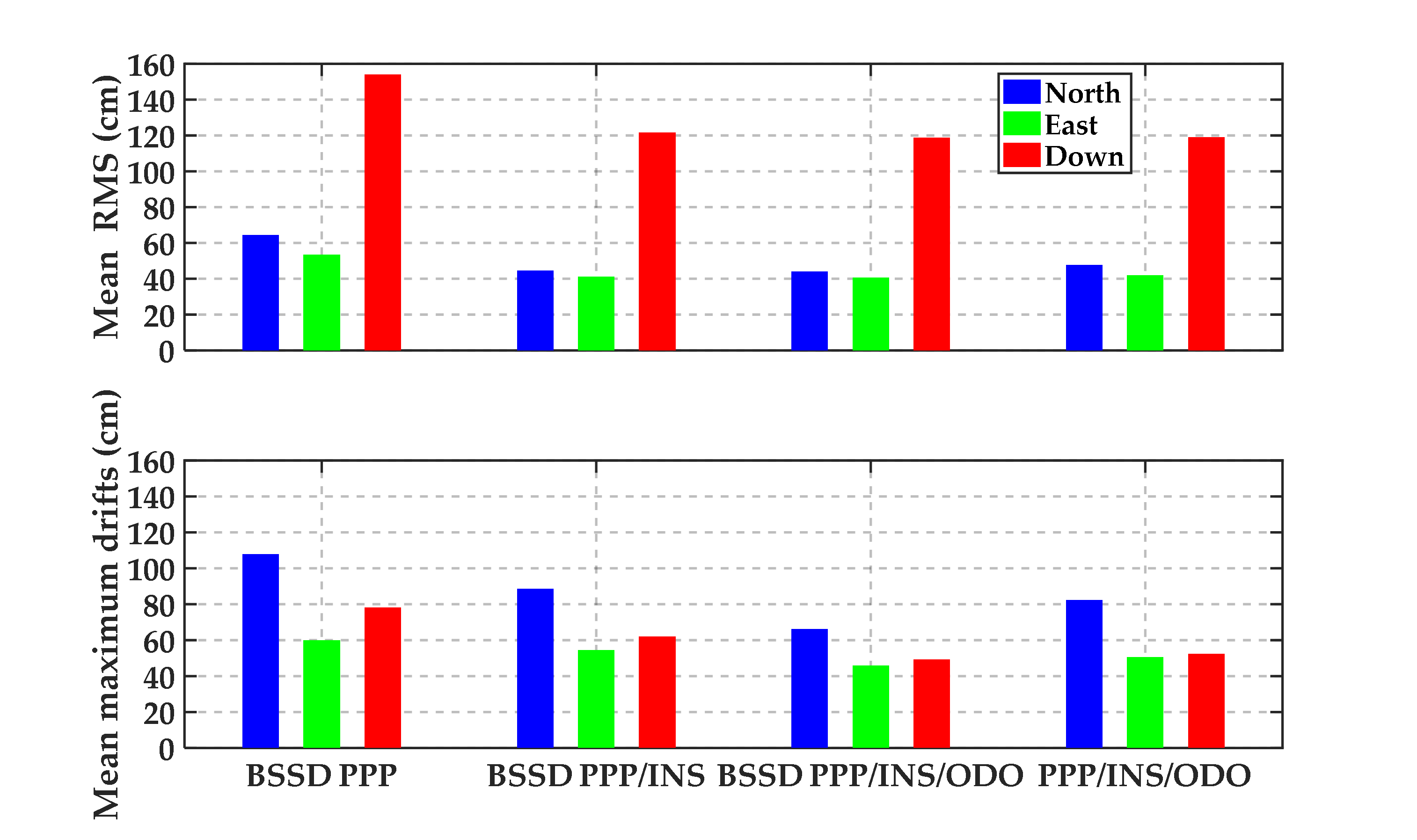
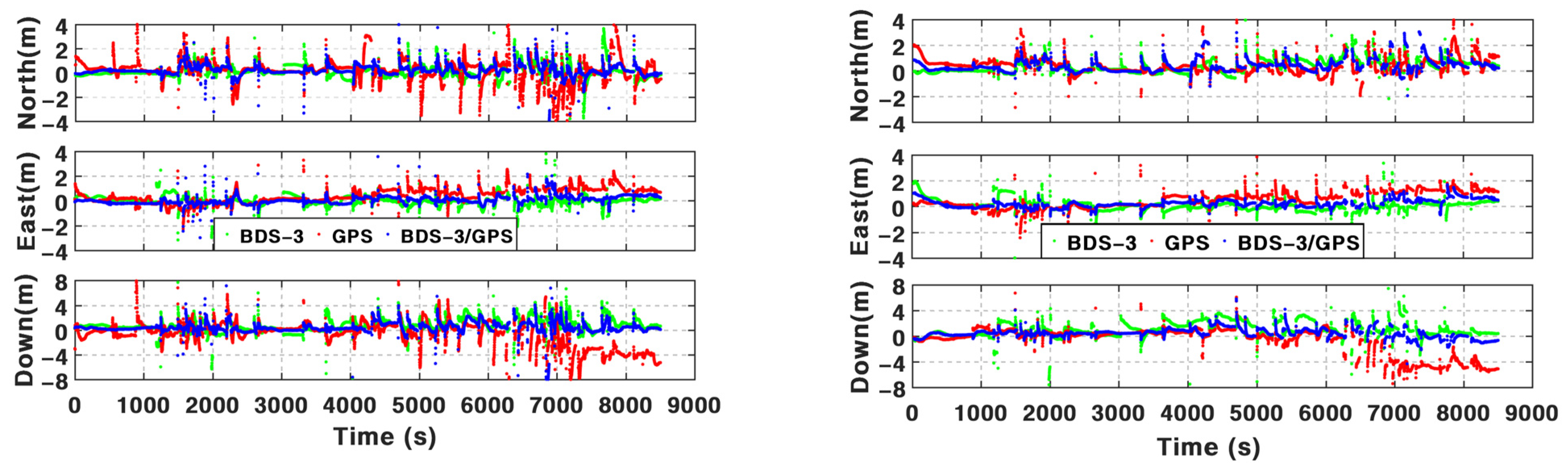
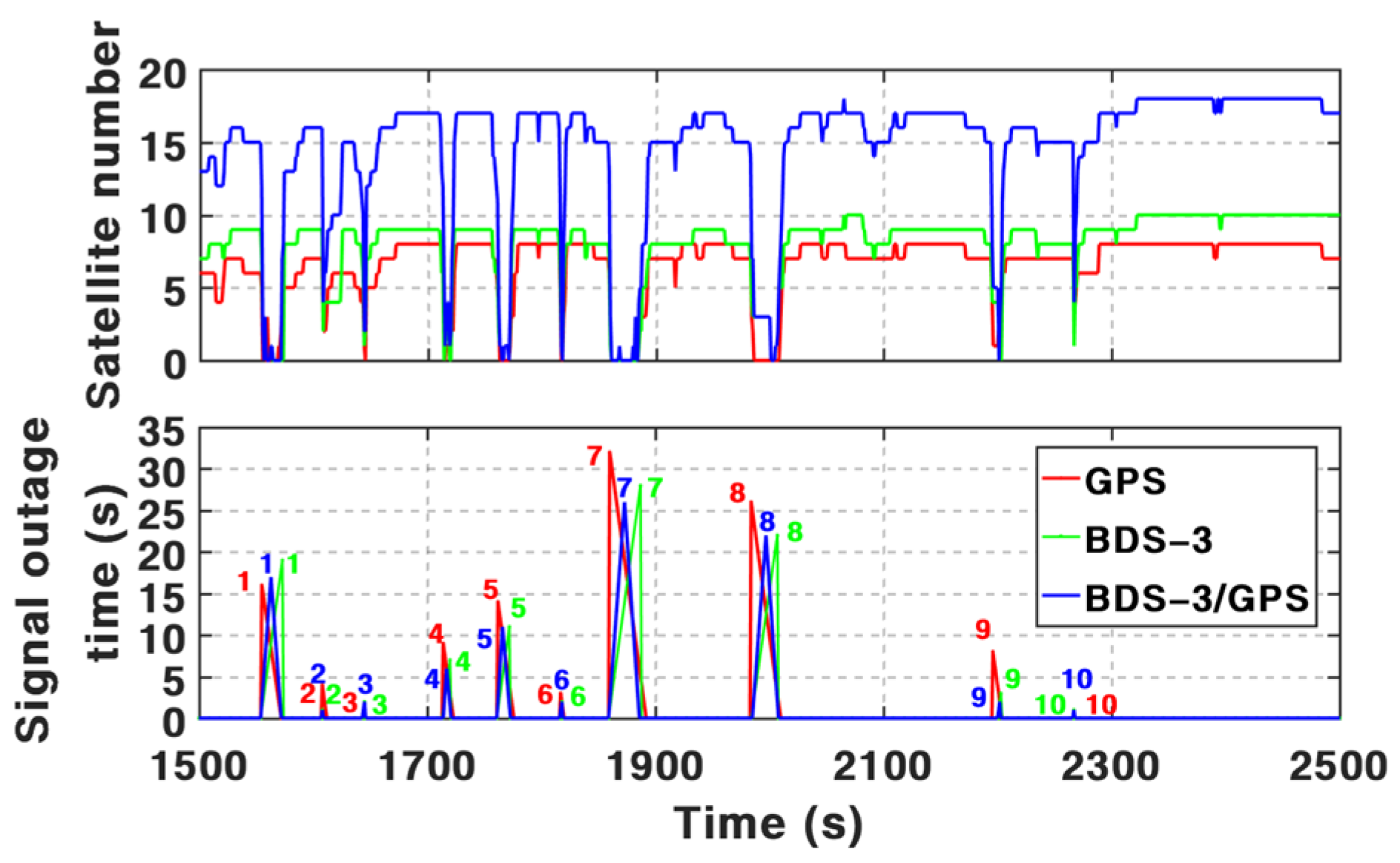
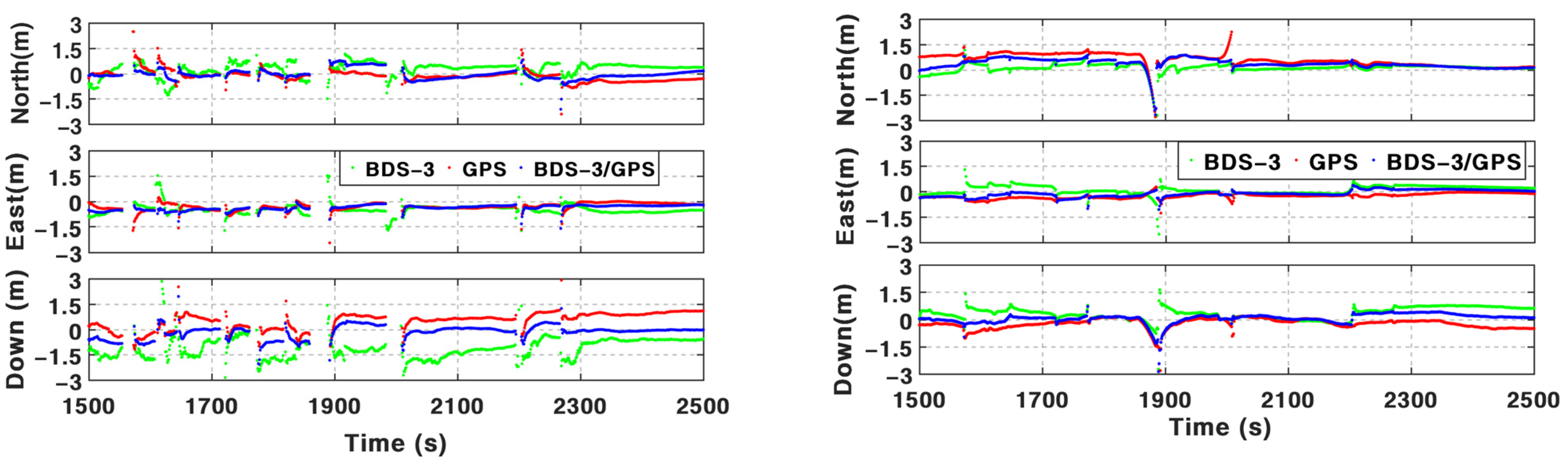
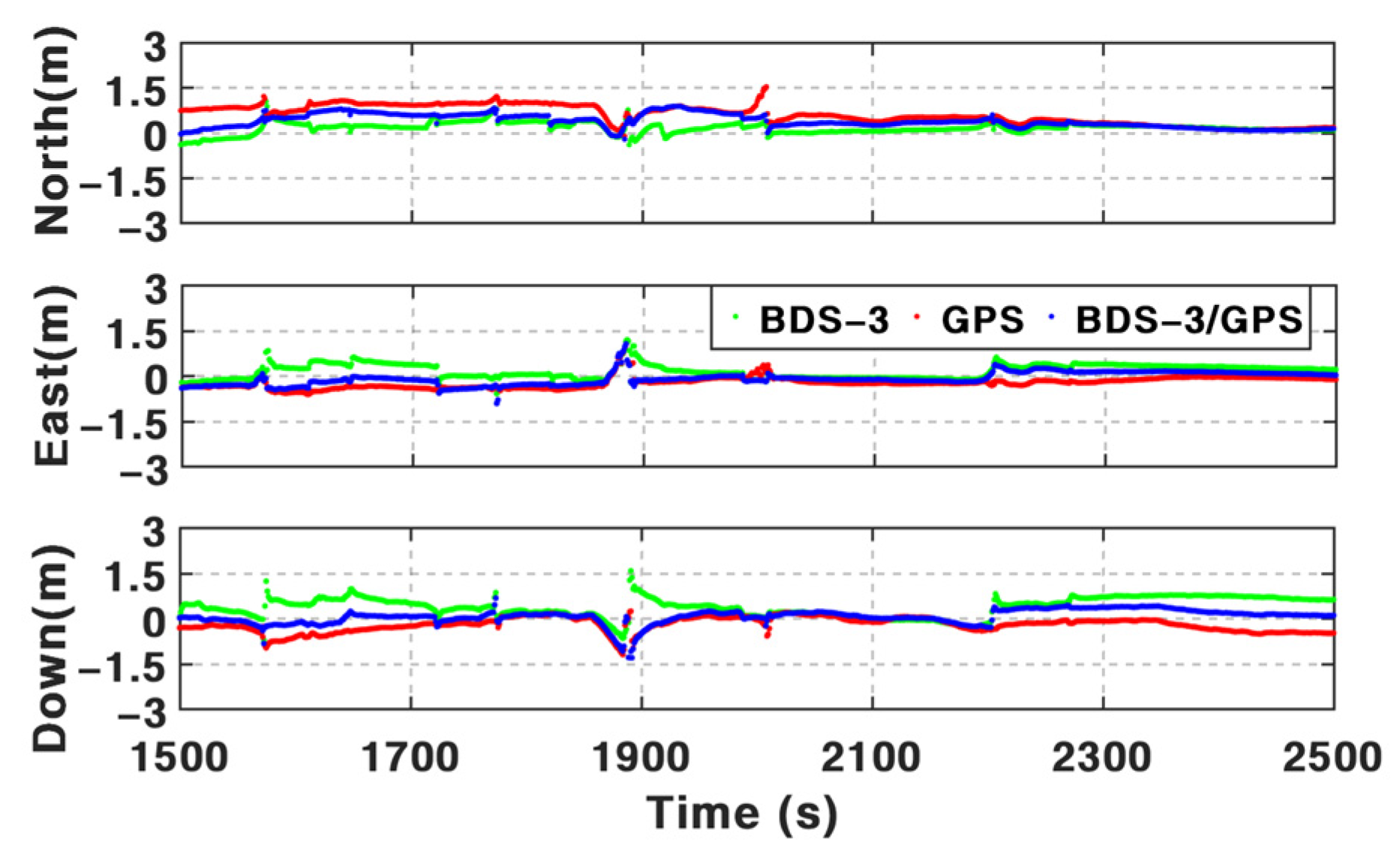
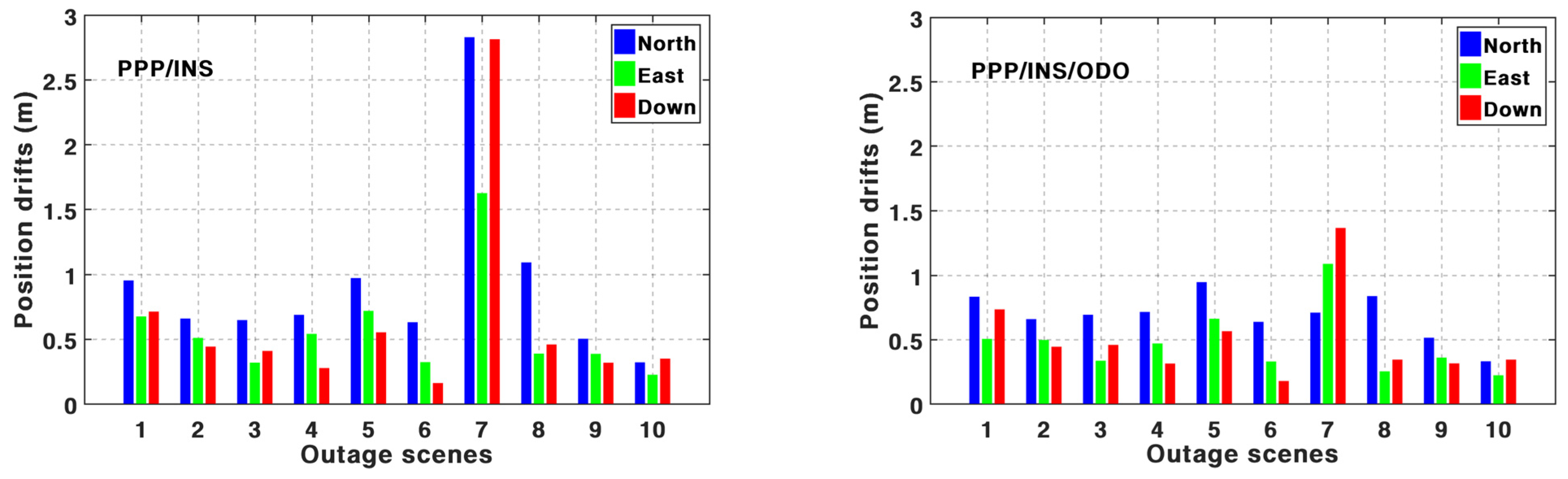
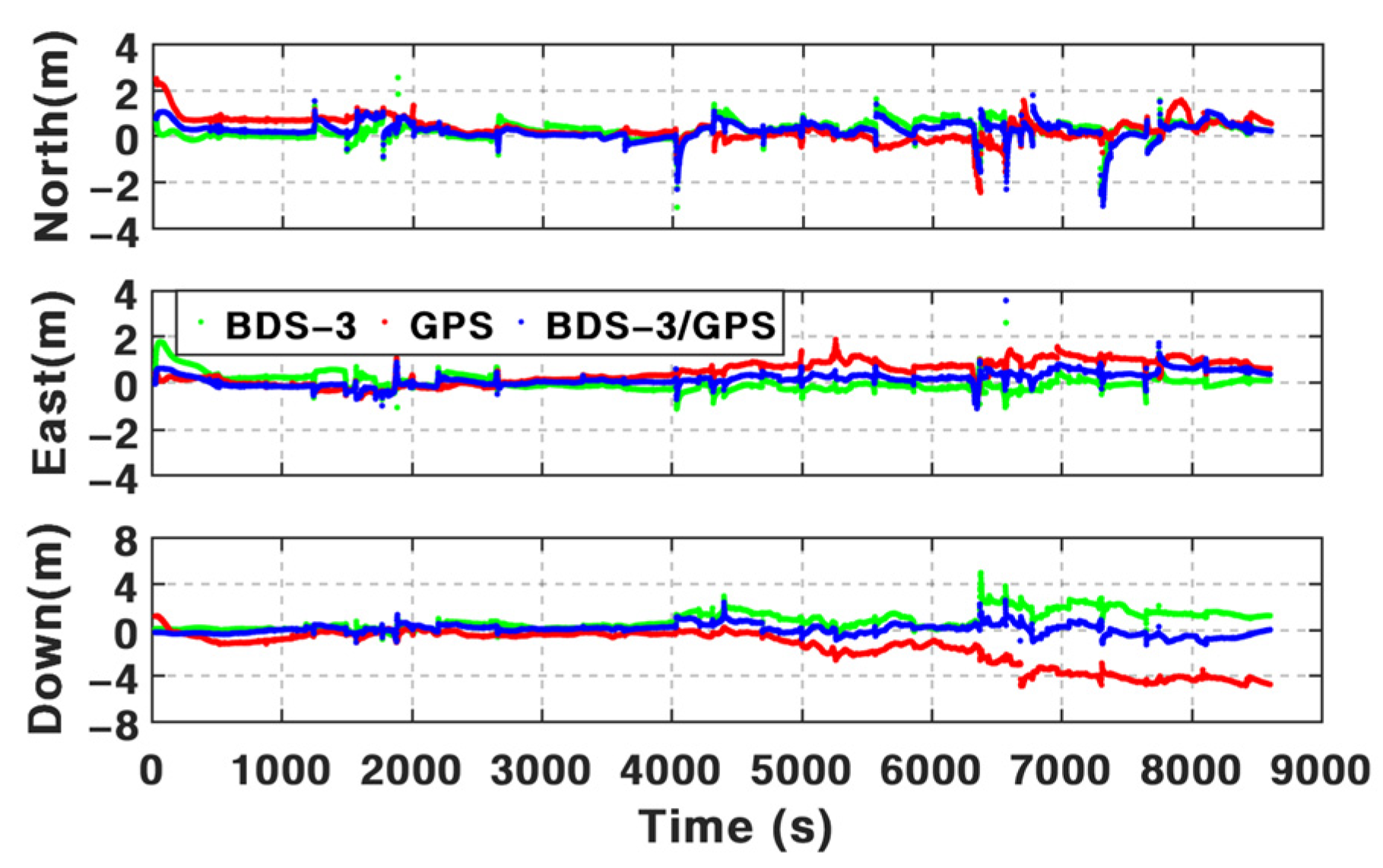
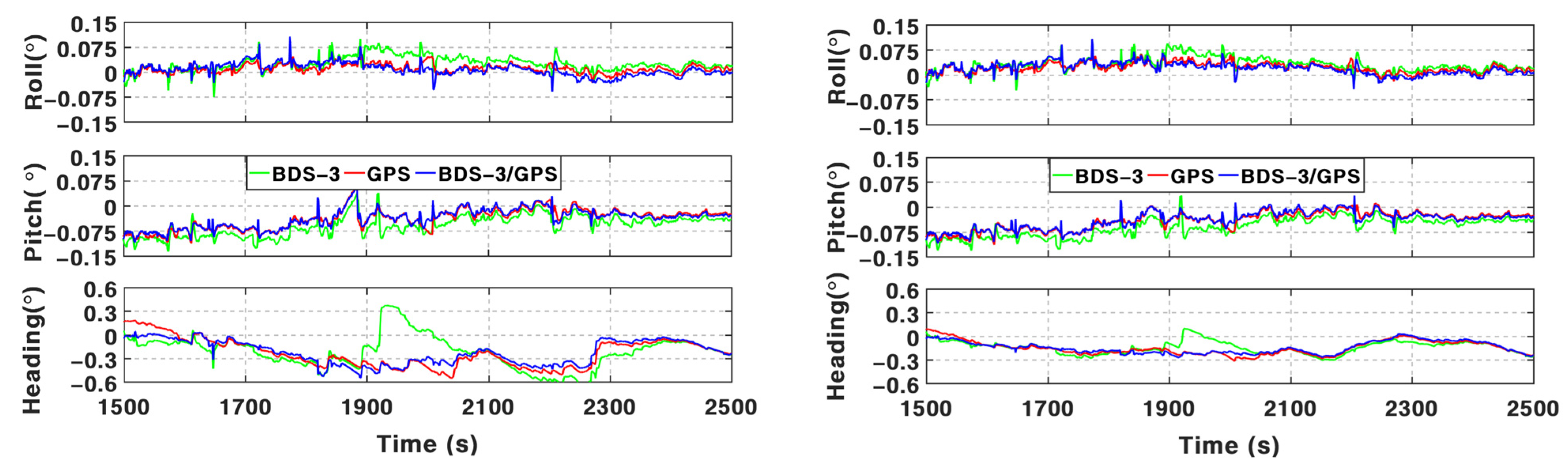
Table 7, the positioning performance of BSSD PPP can be enhanced visibly by the addition of INS and odometer, especially in periods with frequent GNSS outages. The mean position RMS of BSSD PPP is 64.33 cm, 53.47 cm, and 154.11 cm in three components based on PPP-B2b service. By integrating INS, the mean position RMS can be improved by 31.2%, 23.3%, and 27.3%. Such percentages can be furtherly increased by 1.34%, 1.41%, and 1.73% after using an odometer. The test data from 1500 s to 2500 s are adopted to validate the performance in the periods with frequent GNSS outages. The mean position maximum drifts during these periods decreased from 107.96 cm, 59.90 cm, and 78.22 cm of BSSD PPP to 88.52 cm, 54.54 cm, and 62.00 cm of BSSD PPP/INS TCI. After adding an odometer, such values are 66.29 cm, 45.84 cm, and 49.17 cm.
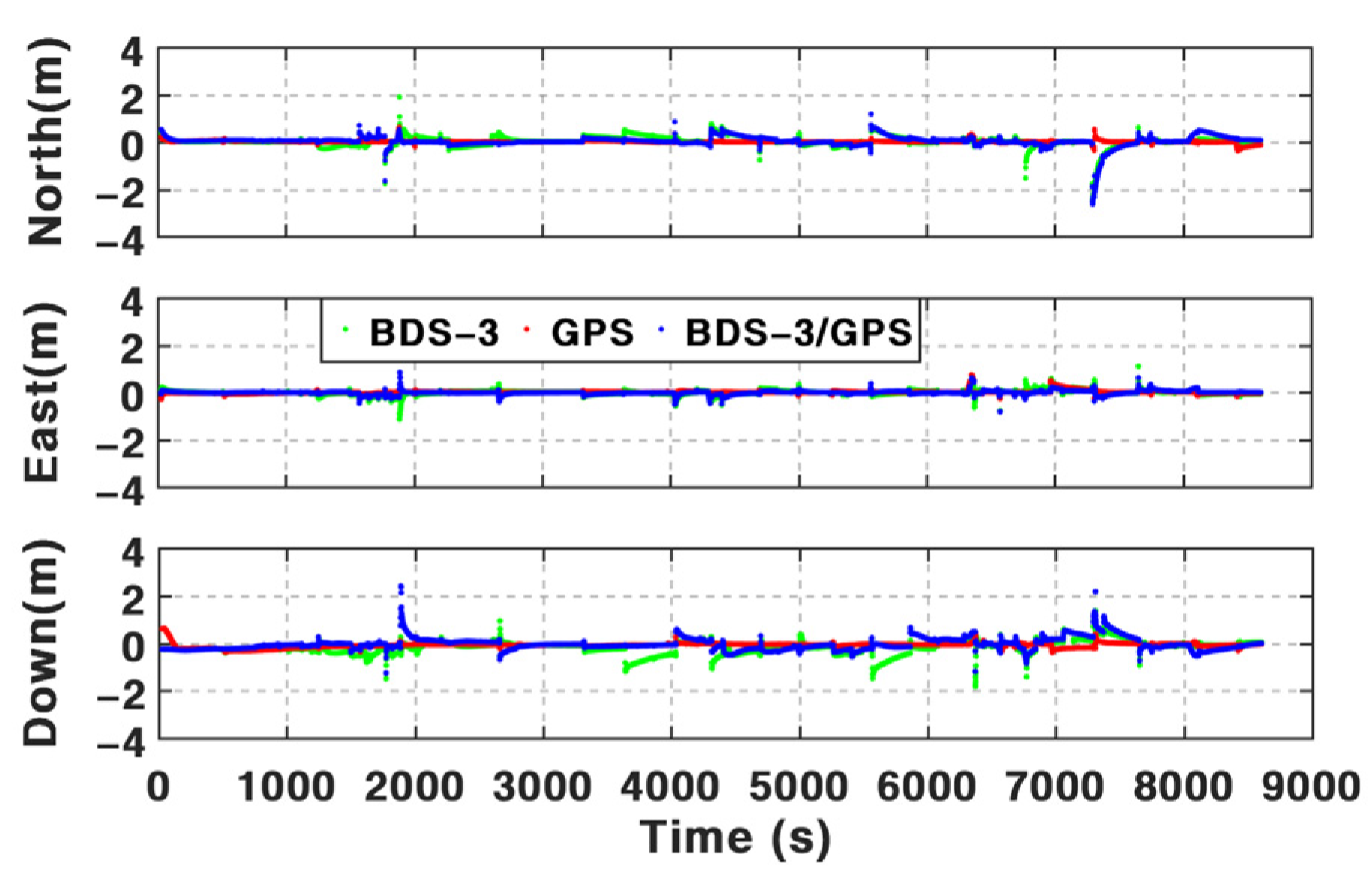
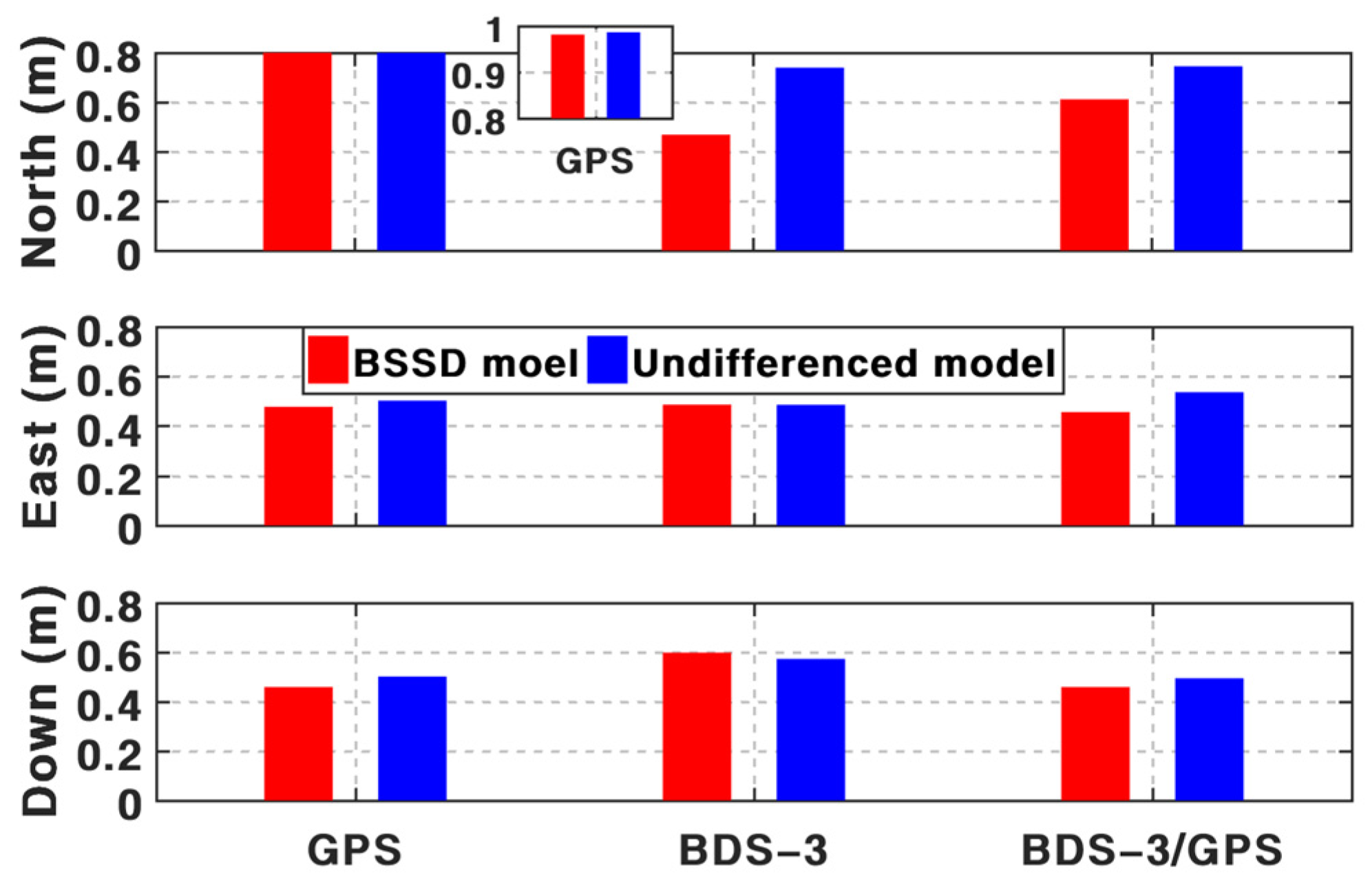
Anyway, the position accuracy of PPP/INS/ODO TCI based on the BSSD model is slightly higher than the solutions based on the undifferenced model. Compared with undifferenced PPP/INS/ODO TCI, the mean position RMS of BSSD PPP/INS/ODO TCI is improved by 7.71%, 3.09%, and 0.27%. The mean maximum drifts can be reduced from 82.38 cm, 50.66 cm, and 52.30 cm to 66.29 cm, 45.84 cm, and 49.17 cm by utilizing the BSSD model.
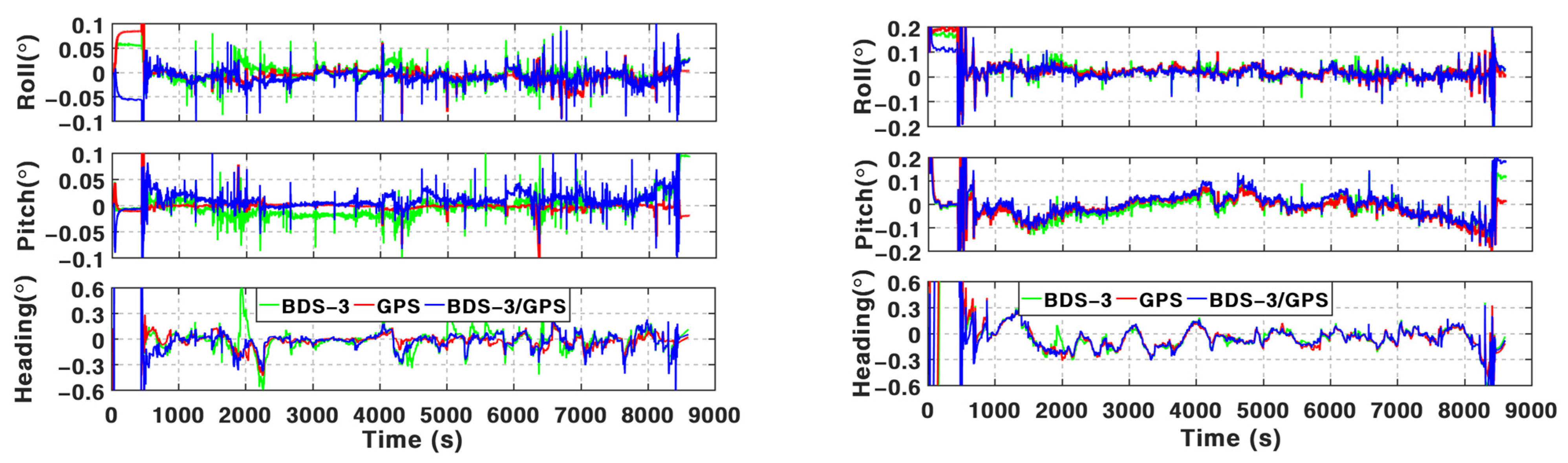
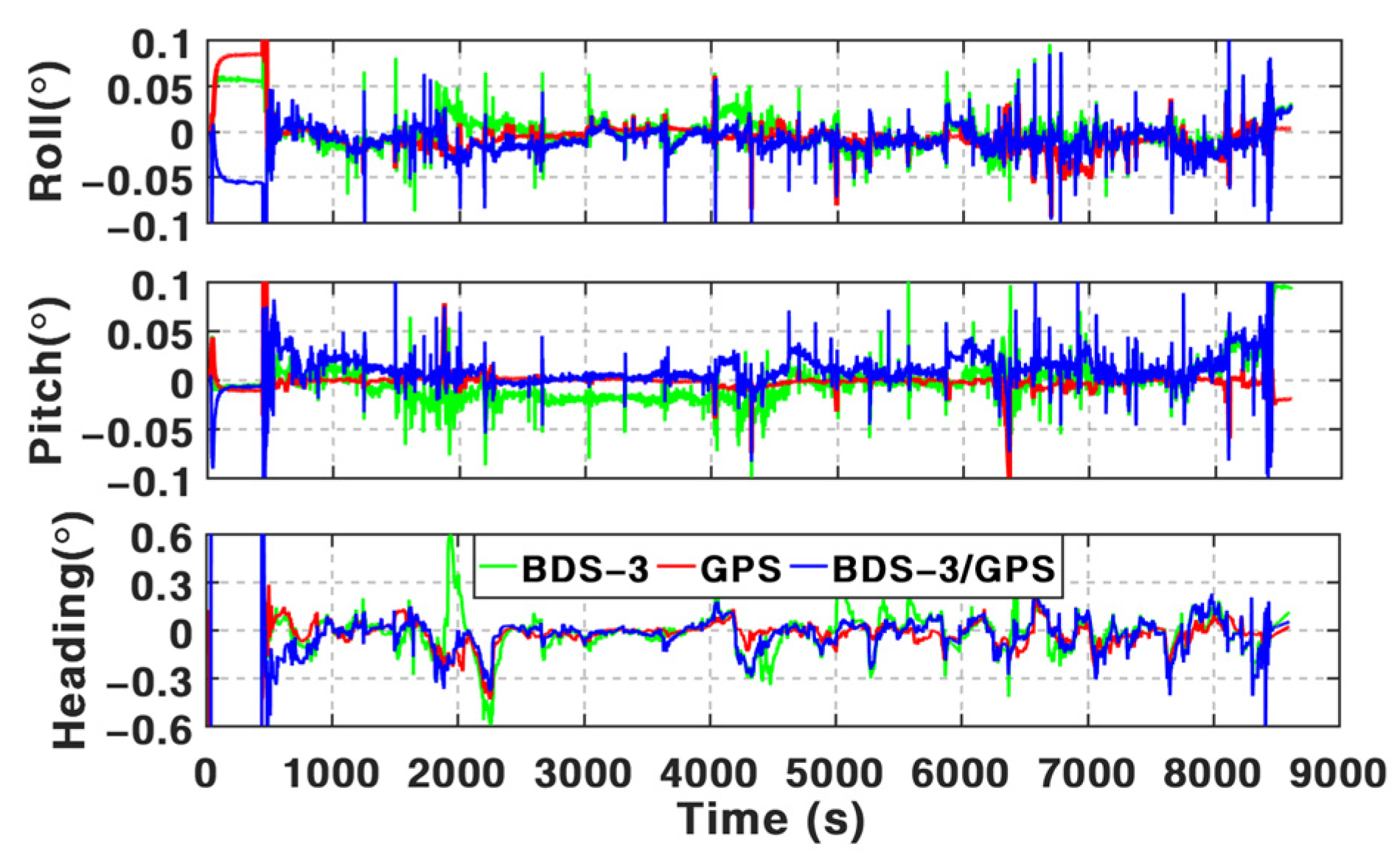
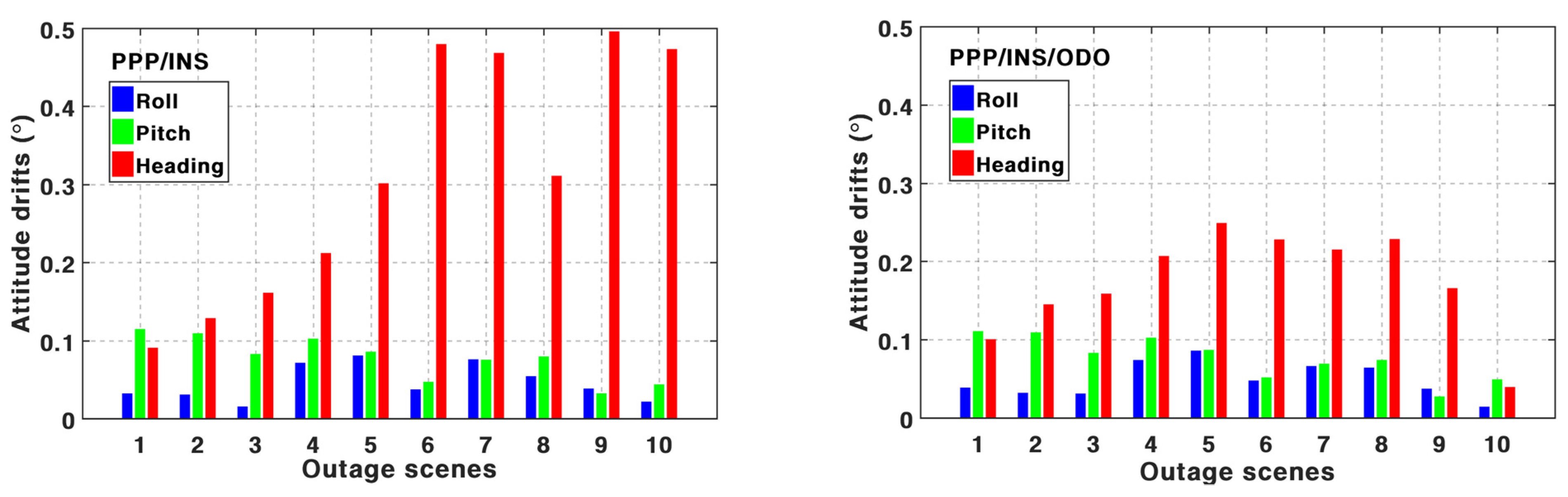
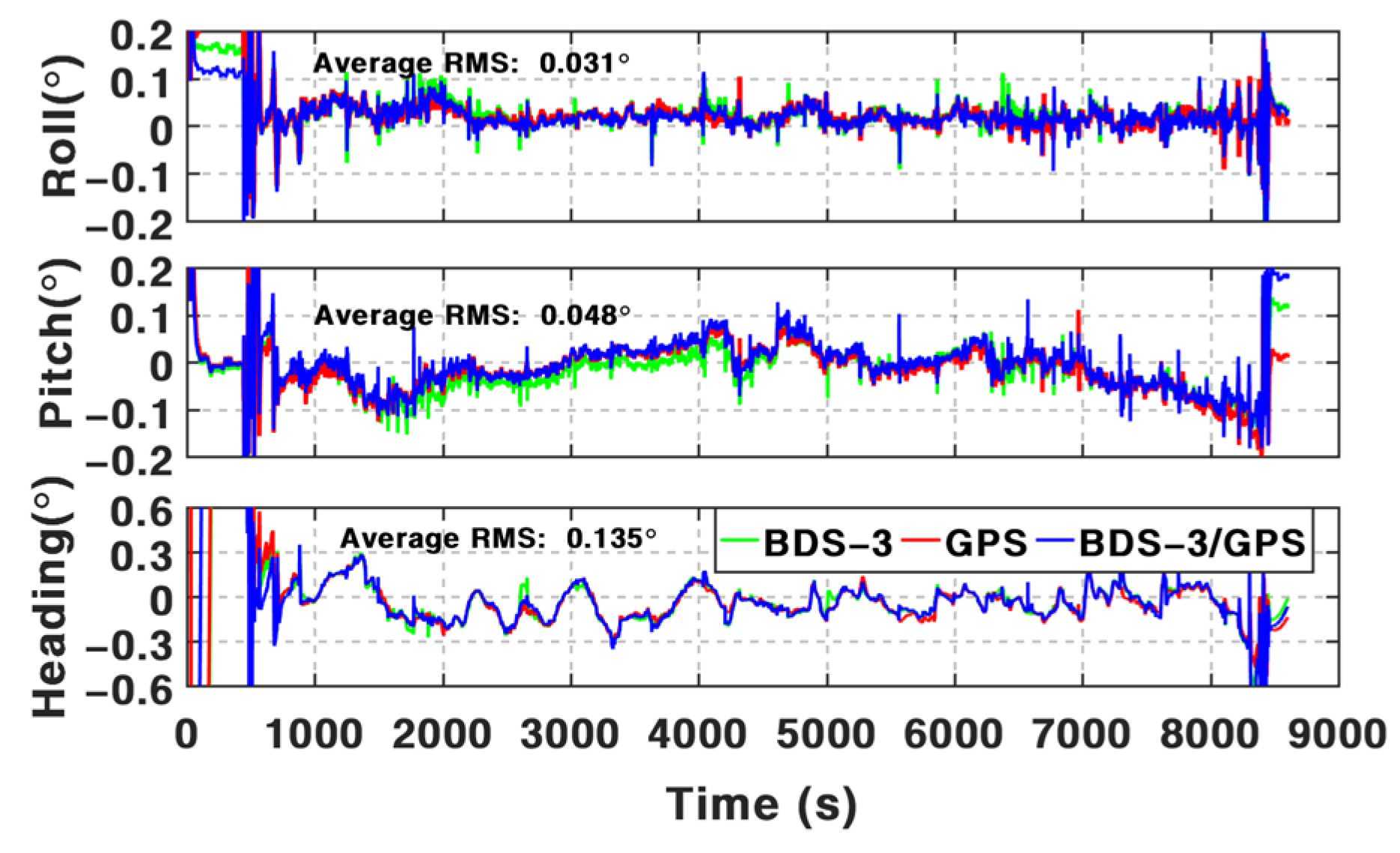
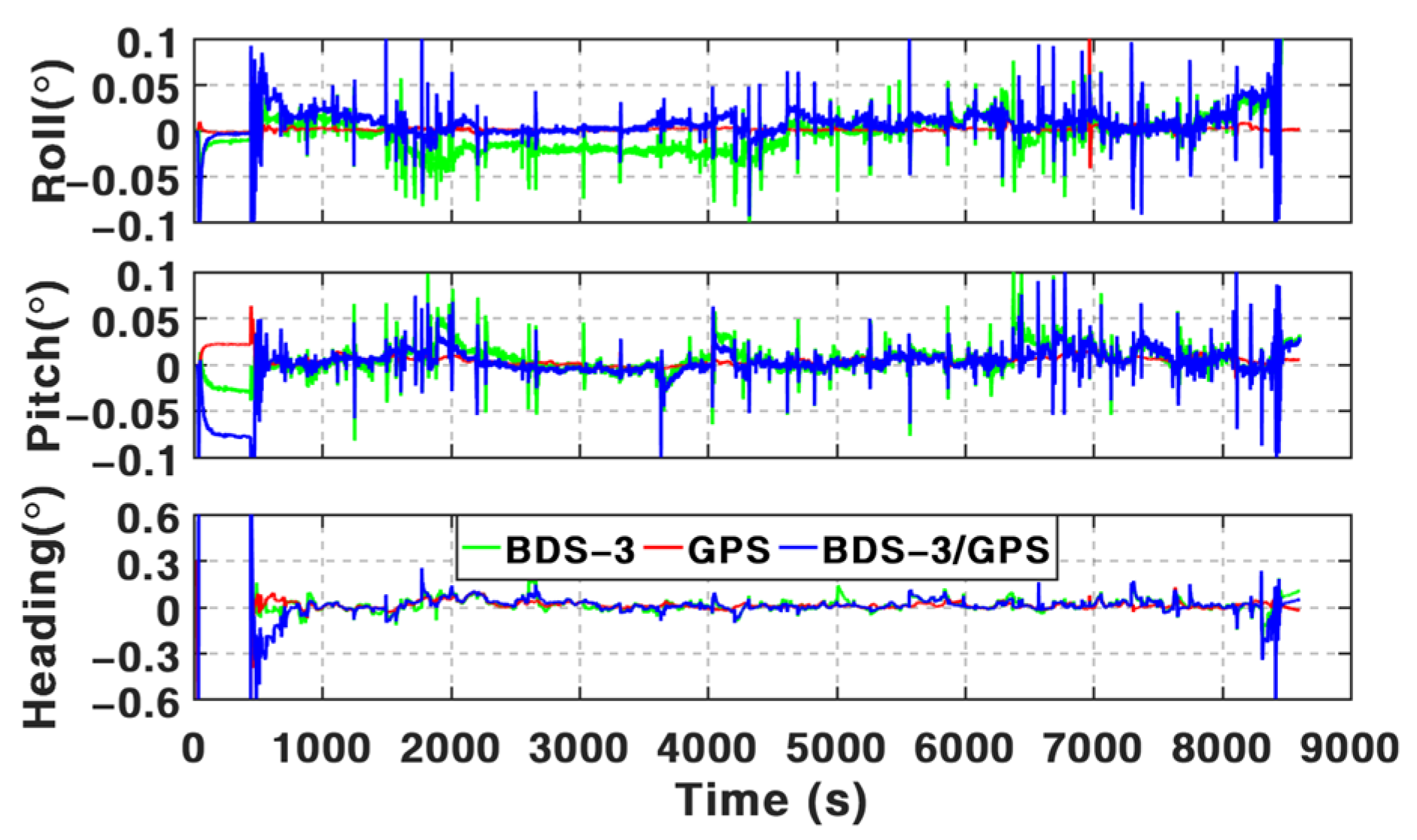
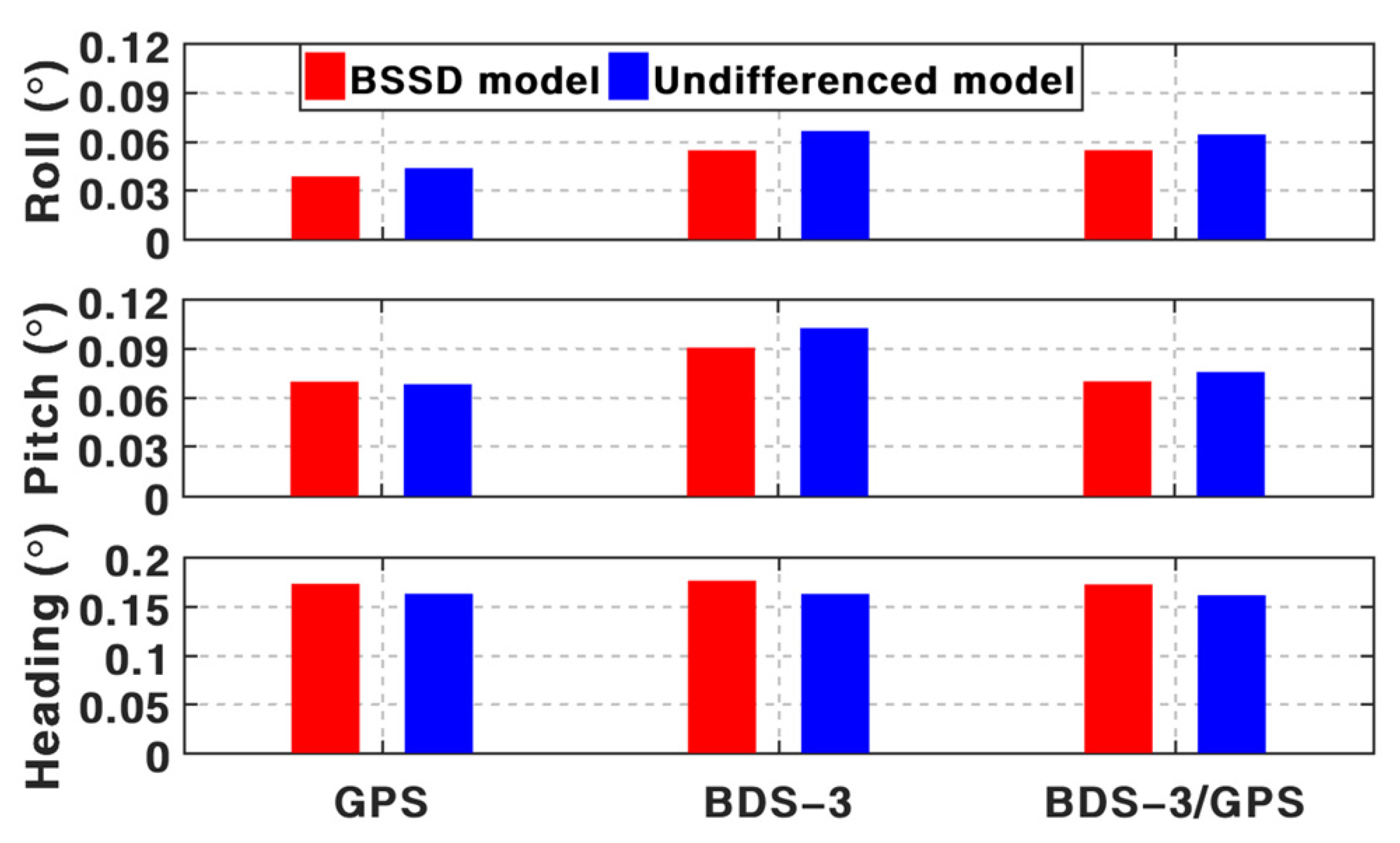
For attitude determination, the mean attitude RMS of PPP/INS TCI is 0.025°, 0.049°, and 0.184° in three components. The addition of an odometer brings a 25% improvement to the RMS of heading angles and reduces the mean maximum drifts from 0.313° to 0.174°. The results of the other two components are comparable. Moreover, the accuracy of PPP/INS/ODO TCI with and without the BSSD model is similar to each other.
5. Conclusions
In this contribution, we implied the tightly coupled integration of BDS-3/GPS, low-cost IMU, and odometer based on the inter-satellite differenced PPP model and the orbit/clock corrections of PPP-B2b. A vehicle experiment in urban circumstances was implemented to validate the performance of positioning and attitude determination of the developed model. The following conclusions can be obtained. (1) With the addition of INS, the improvements of BSSD PPP position accuracy on average are more than 31.2%, 23.3%, and 27.3% in the north, east, and down directions. Further enhancements in position accuracy are achievable with the aid of an odometer, especially while suffering GNSS outages. (2) By using the odometer, the accuracies of pitch and heading angles are improved by about 2.04% and 25%. (3) In comparison with the PPP/INS/ODO TCI based on the undifferenced PPP model, the developed BSSD model can provide results with higher accuracy, especially in the re-convergence periods. For attitude determination, comparable results can be obtained by both the BSSD model and the undifferenced model.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}