1. Introduction
In recent years, with the acceleration of modern urban infrastructure construction and indoor space development, seamless indoor and outdoor positioning technology has attracted extensive attention, and pedestrian positioning in the transition area is the premise and foundation of realizing indoor and outdoor seamless positioning. The multi-sensor fusion positioning technology based on filtering has developed rapidly over recent years to improve the availability and continuity of positioning under complex scenes. However, due to the heterogeneity of data, there are still some problems in the accurate acquisition of the filter measurement model and state model.
GNSS (Global Navigation Satellite Positioning) positioning technology, which can provide positioning, navigation and timing, has been widely used in intelligent driving, disaster monitoring and other fields [
1,
2]. However, when the GNSS receiver is located in a complex positioning scene, the GNSS signal is easily interrupted, resulting in GNSS being unable to provide accurate location information [
3]. To improve the reliability and availability of satellite positioning results in complex scenes, with the continuous development of GNSS modernization and intellectualization, multi-system GNSS data processing has become a trend. Multi-system heterogeneous data-combined positioning can effectively improve the observable number of satellites so as to solve the problem of the poor availability of single-system satellite positioning [
4]. GNSS positioning technology can be divided into single-point positioning (SPP), precision-point positioning (PPP), RTK (Real-Time Kinematic) and PPP-RTK according to the positioning mode and positioning accuracy [
5,
6,
7,
8,
9]. Because RTK positioning technology obtains the high-precision baseline information of rover stations through differential processing of data between the base station and rover station [
10], it cannot meet the needs of single-station operation. PPP positioning technology must rely on high-precision satellite position information and clock error information; it uses high-precision distance observations, such as carrier phase observations, to obtain centimeter-level positioning results [
11], but there are still some problems in its convergence speed and real-time performance. In recent years, some scholars proposed to use information, such as atmospheric parameters, generated by local GNSS reference stations to help fix the ambiguity of PPP, so as to realize the fast fixing of PPP ambiguity. This technology is called PPP-RTK [
12,
13,
14]. Considering the actual needs of pedestrian positioning accuracy, BDS/GPS SPP (single-point positioning by combining BeiDou Navigation Satellite System (BDS) and Global Positioning System (GPS)) is used in the pedestrian GNSS/UWB-integrated positioning system in the transition area to ensure the timeliness and low cost of positioning.
With the development of UWB (Ultra-Wide-Band) technology, compared with GNSS positioning technology, UWB positioning technology has the advantage of high positioning accuracy and good availability in the sheltered area of urban high-rise buildings [
15]. However, the non-line-of-sight (NLOS) phenomenon that is easy to observe in the process of UWB measurement will make the ranging UWB value have a systematic deviation from the reference value. The NLOS distance means that the propagation path is blocked by dynamic and static obstacles, resulting in longer propagation time and a larger measured distance than the actual distance. NLOS effects will lead to frequent changes in UWB observation signal quality and affect the positioning accuracy [
16]. To correctly detect and eliminate UWB NLOS multipath error, machine learning, deep learning, numerical analysis and other methods are used in UWB positioning to give UWB positioning results more robustness [
17,
18,
19,
20,
21]. Guo et al. [
22] adaptively adjusted the variance factor by constructing the evaluation factor of NLOS to improve the robustness of the model. Rayavarapu and Mahapatro [
23] proposed the bagging-based ensembled classifier to identify and eliminate the impact of NLOS error on positioning results. Kim and Pyun [
24] proposed a UWB NLOS error recognition algorithm based on a UWB signal propagation mechanism. Cao et al. [
25] proposed a GMM-IMM-EKF model by combining a Gaussian mixed model (GMM), interacting multiple model (IMM) and EKF (Extended Kalman Filter) algorithm to eliminate the influence of NLOS error on positioning results.
Because there are many obstacles under the typical positioning field of urban positioning, the observation environment is complex and changeable, so it is difficult to provide accurate and reliable positioning services when a single sensor is used. A multi-sensor combined positioning model can improve the availability of GNSS in complex location scenarios by combining the advantages of different sensors. It provides opportunities for high-precision location services in complex location scenarios. MacGougan and O’Keefe [
26] use accurate UWB ranging information to build the GPS RTK/UWB tightly coupled positioning model to make the floating-point solution more reliable and more consistent with the real value. The research results show that, compared with GPS RTK, the GPS RTK/UWB tight combination positioning algorithm can improve the fixed rate of ambiguity and the reliability of the positioning results in complex scenes [
27]. Wang et al. [
28] found that when the observation information is fused with UWB data and GPS data, the robustness of the model is enhanced. At the same time, aiming at the richness of multi-sensor information, the accurate construction of a fusion model is one of the key problems to realize multi-sensor high-precision positioning. Liu et al. [
29] proposed to adaptively adjust the GPS and UWB variance matrix by using the Hermit variance component estimation algorithm according to different data sources. The adaptively robust EKF algorithm adjusts the random model to resist the interference of various gross errors on the positioning results, so it is used to calculate the parameters when multi-sensor positioning is carried out [
30,
31,
32]. Li et al. [
33] used an improved EKF algorithm to realize the INS/GPS/UWB tight combination, to eliminate the interference of gross error of observation values on positioning results and to identify the gross error contained in GPS/UWB, and a robust factor was constructed based on observation value residuals and the chi-square hypothesis test.
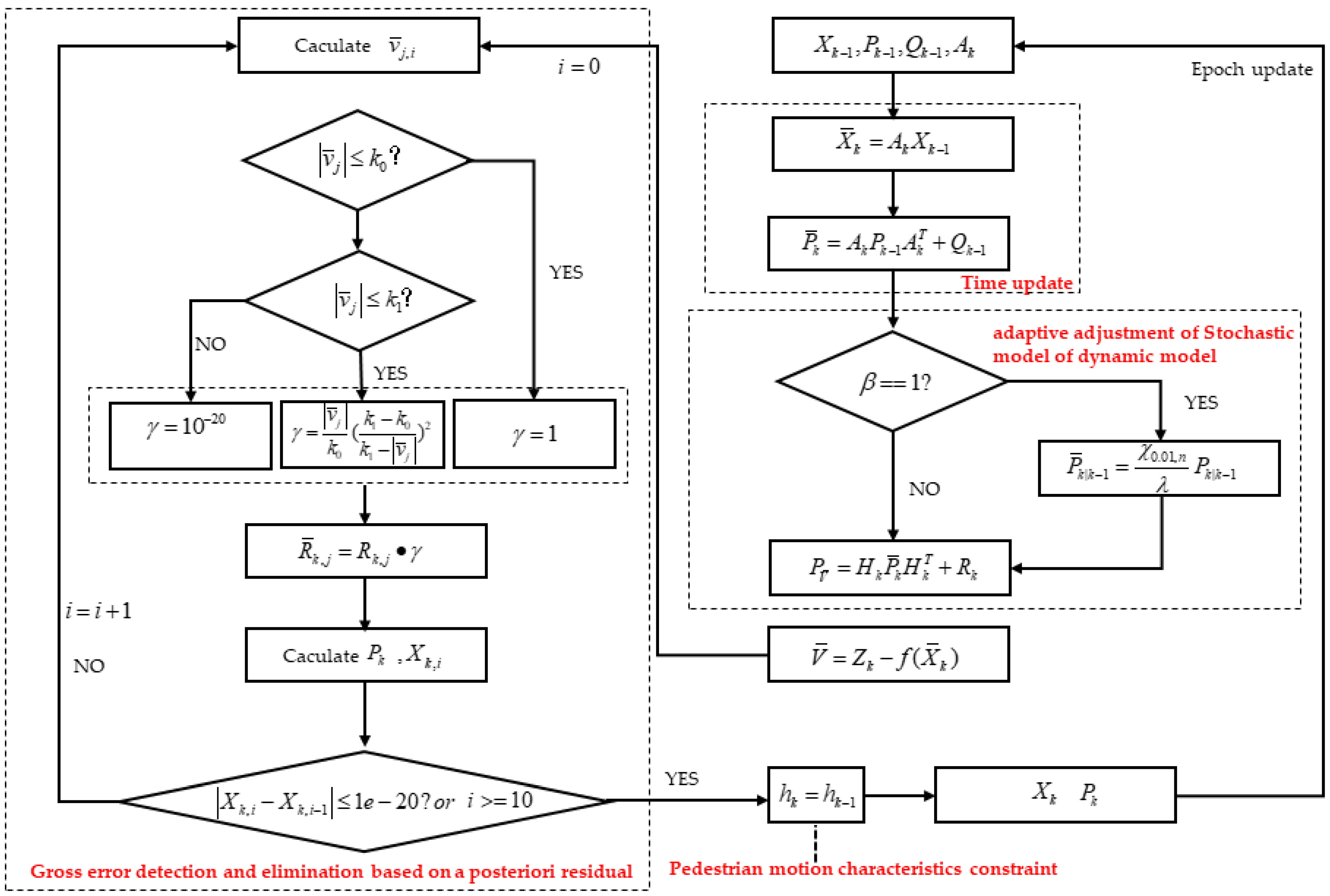
In order to make pedestrian positioning results more reliable and accurate in the transition area, a BDS/GPS/UWB adaptively robust EKF tightly coupled navigation model considering pedestrian motion characteristics is proposed in this paper to improve the positioning accuracy of the BDS/GPS SPP and correctly identify and eliminate NLOS error of UWB positioning. The core contributions of the article are as follows: (1) An environmental discrimination factor is constructed to evaluate the quality of observations, so as to realize the intelligent adjustment of the stochastic model of the Kalman filter dynamic model; (2) a gross error recognition factor based on the posterior residual is constructed to adaptively adjust variance factor of measurement information to eliminate the influence of the gross error on the positioning results; and (3) the pedestrian motion characteristics constraint factor is constructed by modeling the pedestrian motion characteristics to further improve the stability of the combined model.
This paper is divided into four sections:
Section 2 introduces the BDS/GNSS/UWB tightly coupled navigation model;
Section 3 demonstrates and analyzes the algorithm using the measured data; and
Section 4 gives the main conclusions.
3. Results
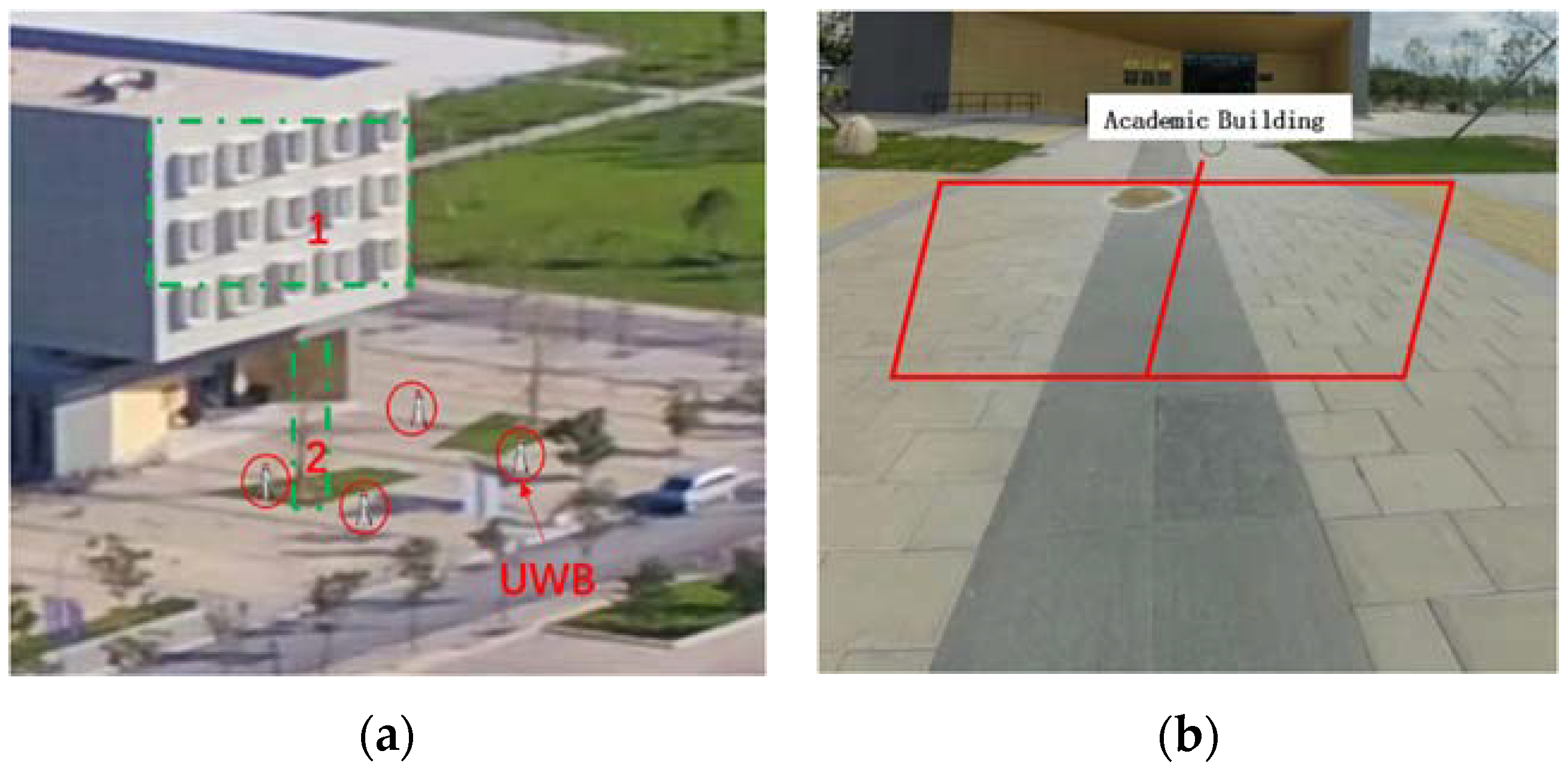
The experimental scene is located at the gate of the teaching building of Beijing University of Civil Engineering and Architecture. Firstly, four UWB positioning base stations are evenly arranged at the door of the teaching building, and then the experimenters hold the BDS/GPS/UWB hybrid positioning terminal to conduct a positioning test along the experimental design track. The specific experimental scenario is shown in
Figure 4.
As shown in
Figure 4, when pedestrians walk according to the design track, the BDS/GPS/UWB equipment will be unable to be located due to the blocking of the BDS/GPS signal in the areas of obstacle 1 and obstacle 2 (Arabic numerals in
Figure 4a). At the same time, due to the blocking of the UWB base station in the obstacle 2 area, there will be an NLOS problem in the pedestrian UWB positioning terminal.
The pedestrian walking track is shown in
Figure 4b, which is 8 m long and 6 m wide; Meanwhile, the distance between UWB base stations is 30 m. In order to evaluate the accuracy of pedestrian end positioning results, this paper uses the high-precision geodesic RTK combined positioning results as the track reference value (the positioning accuracy can be controlled within 5 cm)
3.1. BDS/GPS SPP
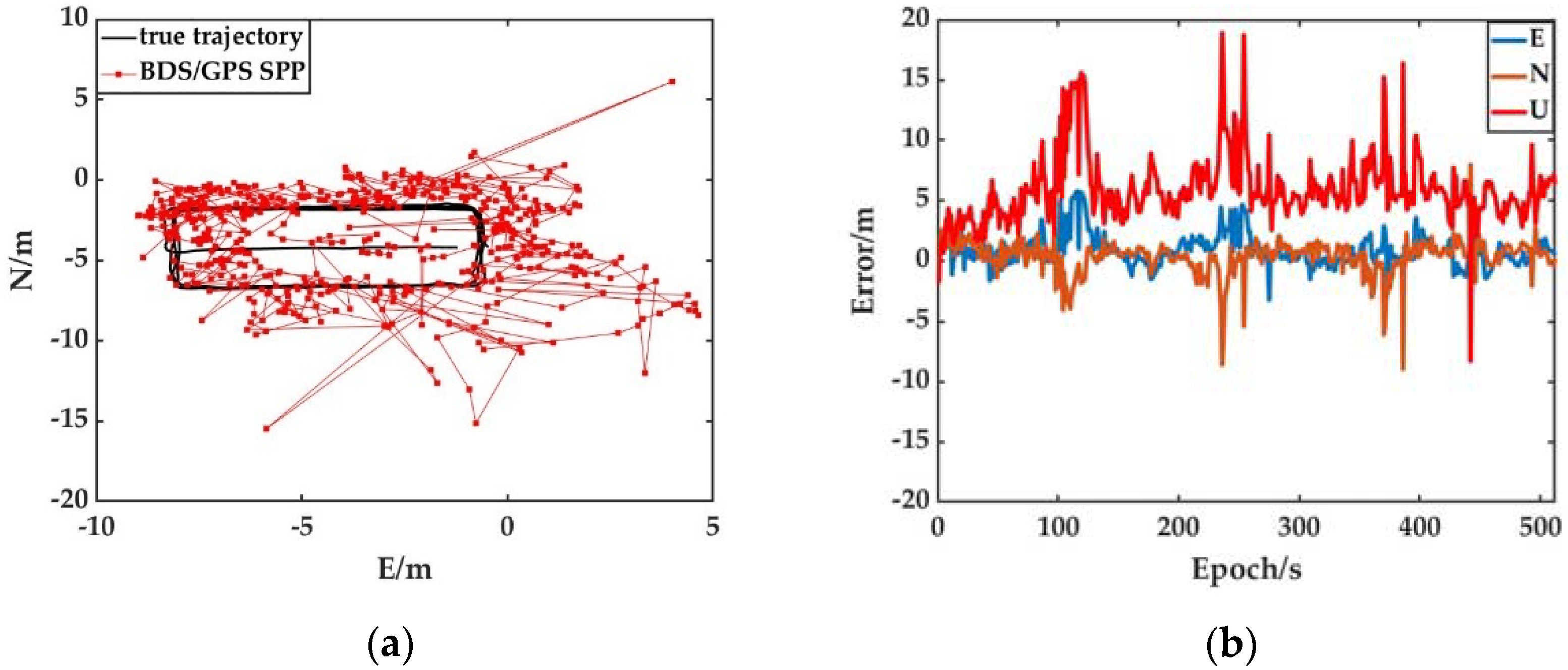
In order to demonstrate and analyze the positioning performance of BDS/GPS SPP in the transition area, this paper first uses pure BDS/GPS SPP to locate pedestrians in the transition area. The experimental results can be found in
Figure 5.
Figure 5 shows the trajectory of pedestrians and biases of the BDS/GPS SPP positioning model on the three axis systems of the local coordinate system in the transition area. Due to the shielding of buildings in the transition area, the BDS/GPS satellite signal quality is poor, the data availability is low and there is an obvious bias based on BDS/GPS SPP. At the same time, when a single BDS/GPS SPP is used for pedestrian positioning in the transition area, the plane positioning accuracy is better than 5 m and the elevation positioning accuracy is better than 10 m, which can be seen from
Figure 5b. Due to the problems of signal interruption and gross error observation interference of BDS/GPS in the transition area, some epoch positioning results have obvious outliers.
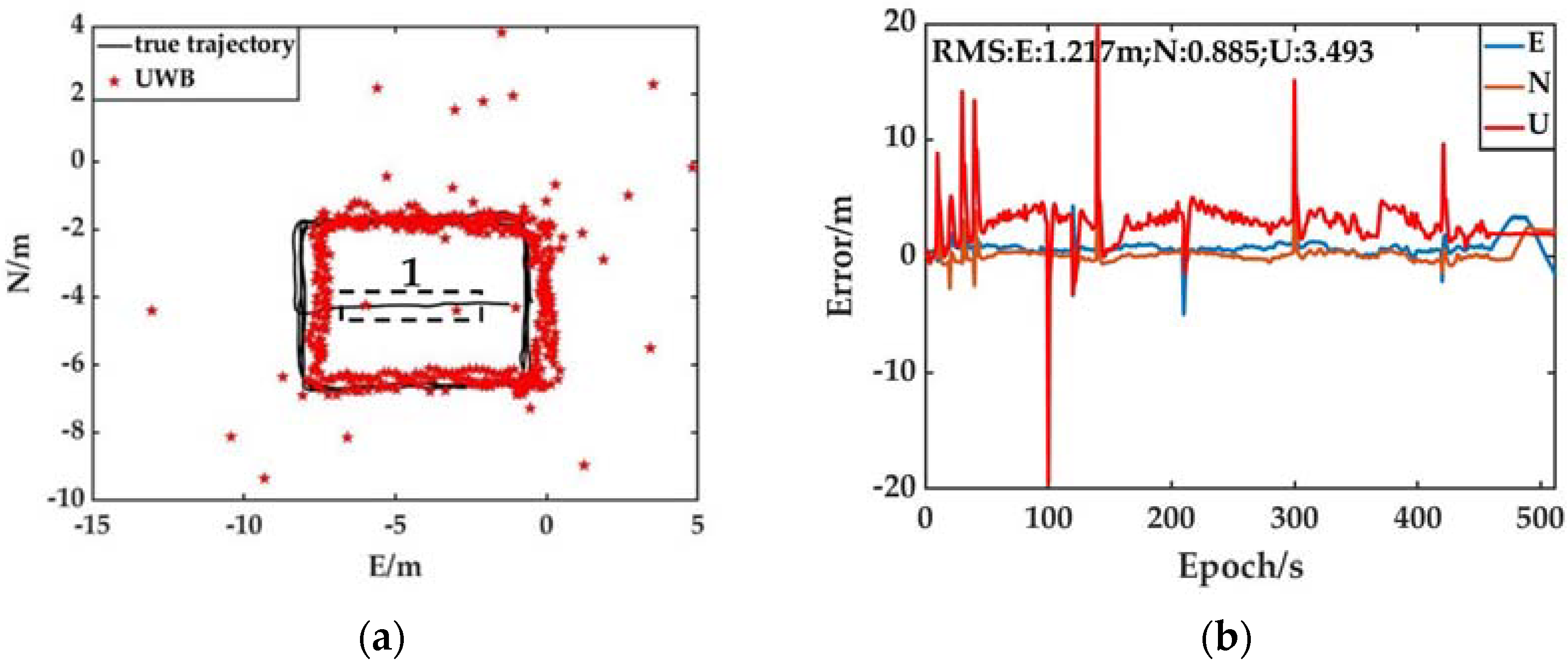
3.2. UWB Positioning
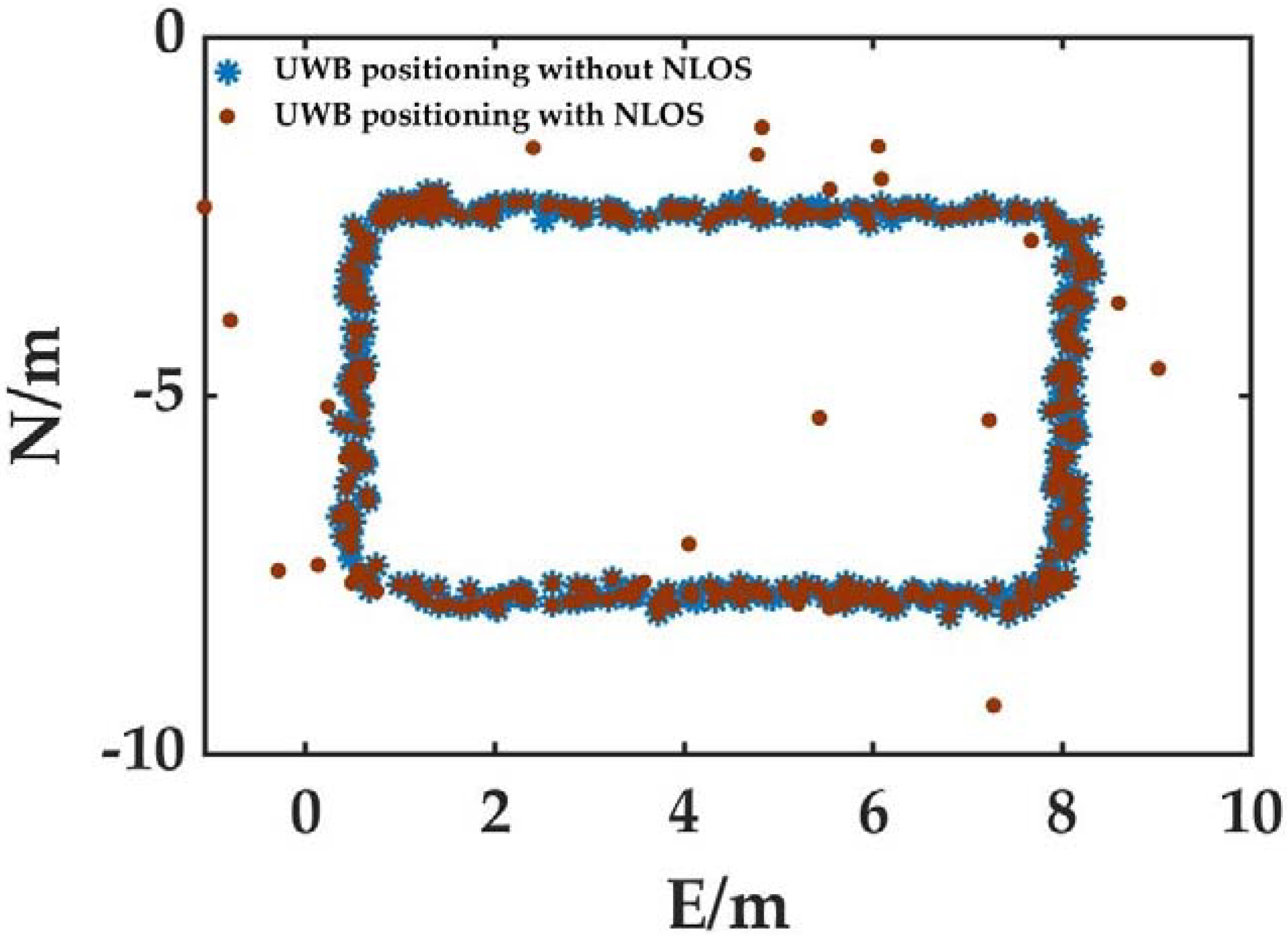
In order to evaluate the robustness and availability of UWB navigation in the transition area, this paper uses pure UWB equipment to conduct the pedestrian end positioning experiment in the transition area. To evaluate the interference degree of NLOS error on the positioning results, this paper simulates the interference of UWB ranging signal by randomly placing obstacles in the experimental process. Through the horizontal comparison of the positioning results in
Figure 5, it is obvious that when the pedestrian in the transition area uses the UWB positioning terminal for positioning, due to the high-precision characteristics of UWB ranging information, the positioning result is in high compliance with the reference value when there is no NLOS (as shown in the overall trajectory in
Figure 6a). At the same time, it can be seen that when there is an NLOS error in the observation value, the positioning result has serious bias compared with the true trajectory, and the degree of bias from the reference value is related to the size of the NLOS error. At the same time, due to the problems of easy interruption of the data link in the transmission process of UWB base station data, the continuity of the UWB positioning results is low (as shown in position 1 in
Figure 6a). In order to further quantitatively analyze the accuracy of UWB positioning results in the presence of NLOS error, taking the root-mean-square error (RMS) as the accuracy evaluation index, this paper provides the accuracy of UWB positioning on three axis systems of a local coordinate system. According to the analysis of the index value, the UWB plane positioning accuracy is better than 1.5 m in the presence of NLOS error. However, due to the problems of poor geometric and spatial structure of the base stations and the small number of base stations in UWB positioning, the positioning accuracy of elevation direction is poor (The error of individual epochs can reach 20 m). At the same time, by further analyzing the UWB positioning trajectory and the network shape of the base station, it can be seen that the difference in the geometric space structure of the UWB base station will lead to obvious differences in the positioning accuracy of UWB in different directions.
To sum up, when pedestrians in the transition area use UWB to obtain their location information, the plane positioning results are in high conformity with the actual trajectory if there are no obvious obstacles that will introduce NLOS errors into the observation scene. However, when there is an NLOS error, the plane positioning results will deviate from the actual position, and the instantaneous deviation can reach 10 m. On the other hand, when pedestrians use single BDS/GPS sensors for positioning, due to the serious occlusion of satellite signals, the positioning results seriously deviate from the true value, which cannot meet the high-precision positioning needs of pedestrians in the transition area.
3.3. BDS/GPS/UWB Tightly Coupled Navigation
In order to evaluate the effectiveness of the BDS/GPS/UWB tightly coupled navigation model, four experiments were designed:
- (1)
BDS/GPS SPP (Starting from this section, the abbreviation BDS/GPS SPP is used to represent the experiments);
- (2)
BDS/GPS/UWB tightly coupled positioning based on EKF (Starting from this section, the abbreviation EKF is used to represent the experiment);
- (3)
BDS/GPS/UWB tightly coupled navigation with an environmental discrimination factor (Starting from this section, the abbreviation AEKF is used to represent the experiment);
- (4)
BDS/GPS/UWB tightly coupled positioning based on adaptively robust EKF with additional pedestrian motion characteristics constraints (Starting from this section, the abbreviation AREKF is used to represent the experiment).
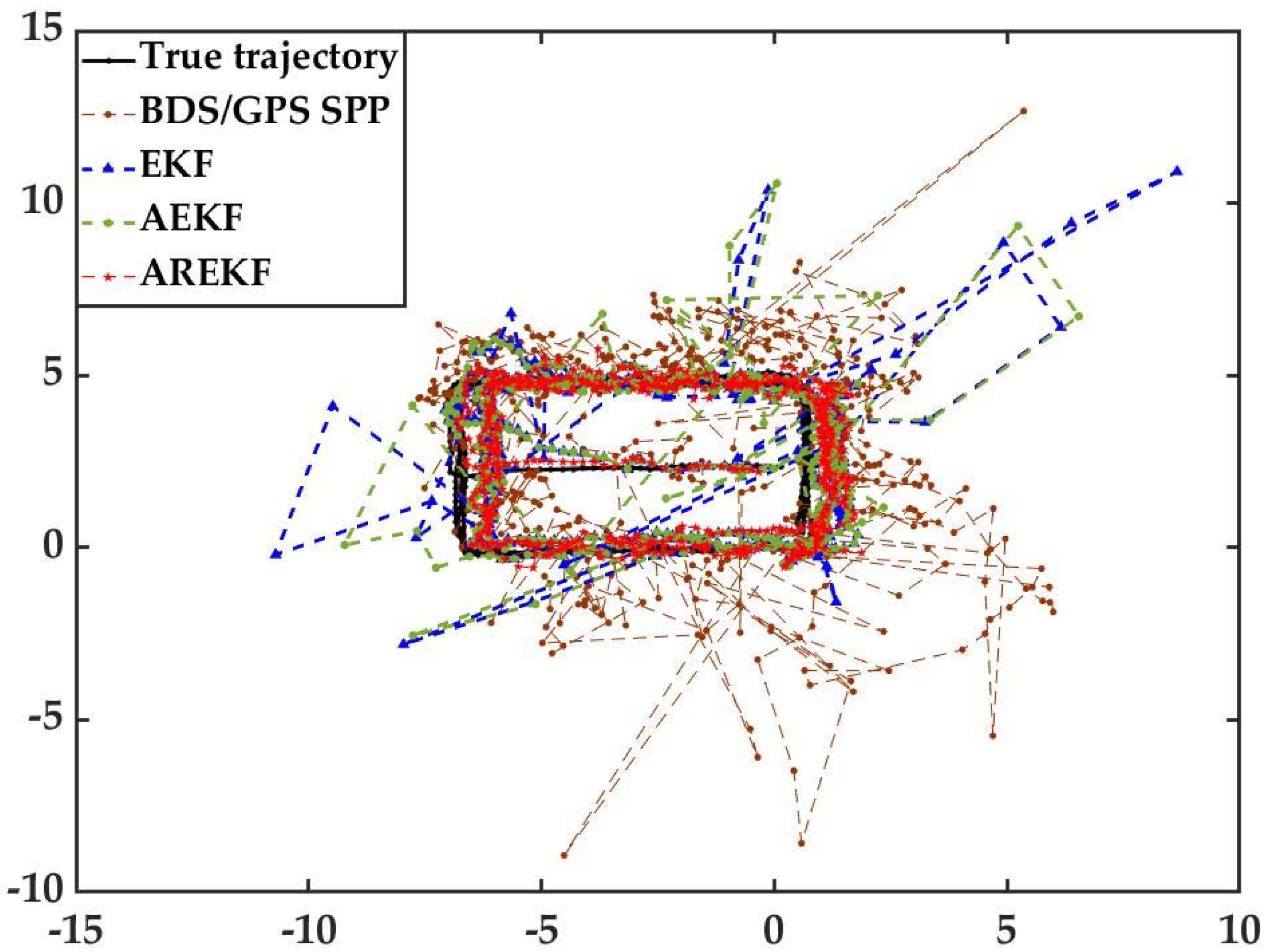
Figure 7 shows the pedestrian positioning trajectory and real trajectory in the transition area under the conditions of each experiment. As can be seen from
Figure 7, when conventional EKF is used for BDS/GPS/UWB tightly coupled navigation, the positioning accuracy is improved compared with BDS/GPS SPP, and its trajectory is consistent with the reference trajectory. However, because the conventional EKF cannot adaptively adjust the dynamic model and does not have robust ability in the process of parameter solutions, the positioning bias of the filter in some epochs is too large. The adaptive EKF filter based on the environmental discrimination factor realizes the adaptive adjustment of the dynamic model by evaluating the accuracy of the dynamic model in different environments. Therefore, its positioning accuracy is obviously better than that of the conventional EKF filter. However, as can be seen from
Figure 7, whether using conventional EKF or AEKF, when there are gross error factors such as UWB NLOS error in the observed values, there will be obvious bias in the positioning results; the model proposed by this paper realizes the detection and elimination of gross errors in observations by constructing a gross error detection factor on the basis of AEKF and further improves the stability of the algorithm by adding pedestrian motion features. As can be seen from
Figure 7, the model in this paper can not only effectively resist the influence of the gross error of the observation value on the positioning results, but it also has the characteristics of high stability, and its positioning trajectory is highly consistent with the reference trajectory.
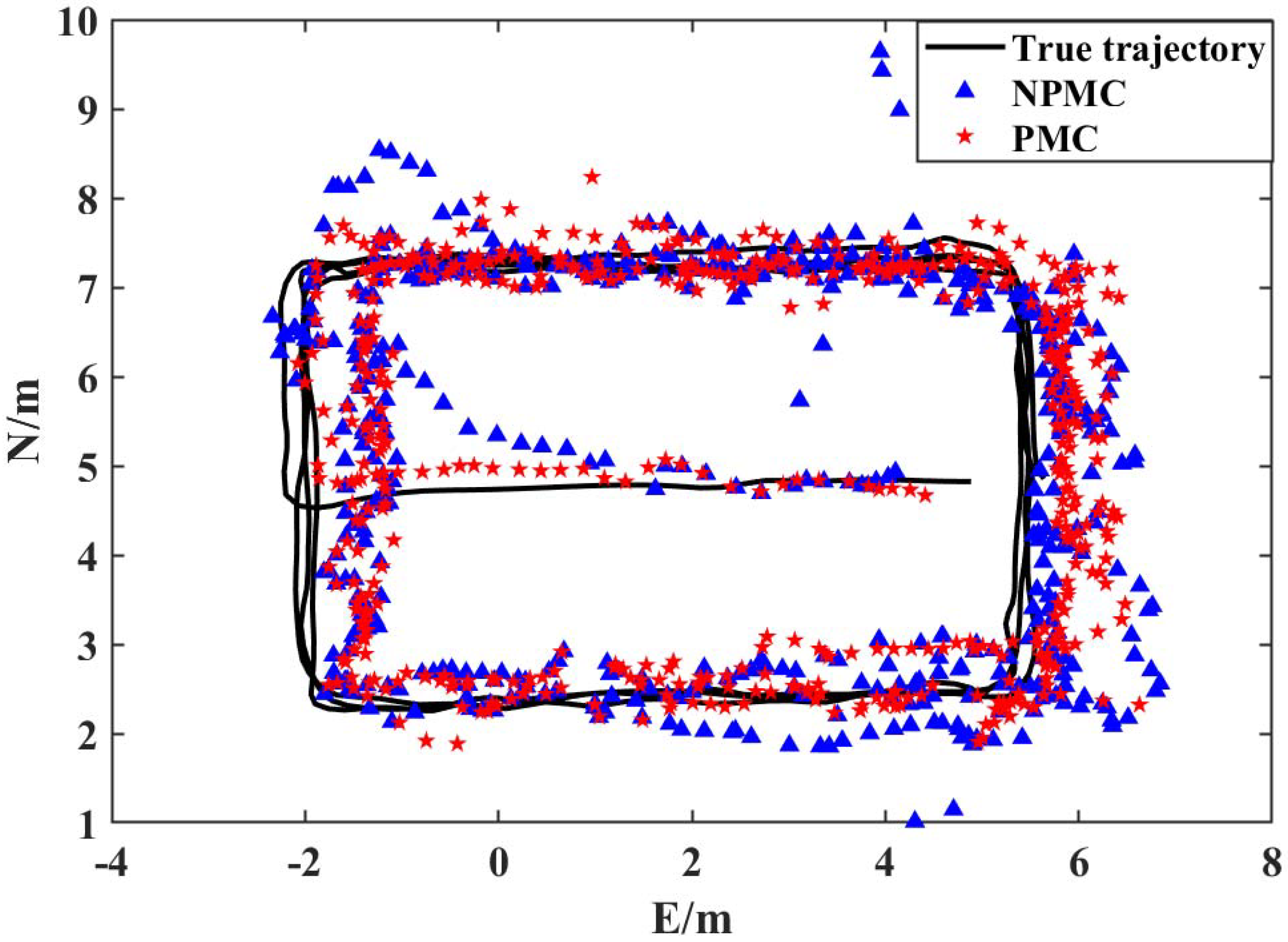
Through further analysis, it is obvious that the observability of UWB at position 1 in
Figure 6a is reduced due to the problems of easy interruption of data connection during the data transmission of the UWB equipment. For the fusion positioning algorithm under these circumstances, the quality of the observation value depends on the observation value of the BDS/GPS. However, due to the problems of easy loss of data and the poor accuracy of the observation values in the transition area of the BDS/GPS, the positioning results at this position will deviate. To solve this problem, this algorithm constructs high-precision virtual observations for the fusion positioning system by adding pedestrian motion characteristics constraints, so as to further improve the robustness and universality of the algorithm. (As shown in
Figure 8, NPMC (None Pedestrian Motion Characteristics) represents an adaptively robust EKF fusion algorithm without pedestrian motion characteristics constraints, and PMC (Pedestrian Motion Characteristics) represents the adaptively robust EKF fusion algorithm with additional pedestrian motion characteristics constraint information.)
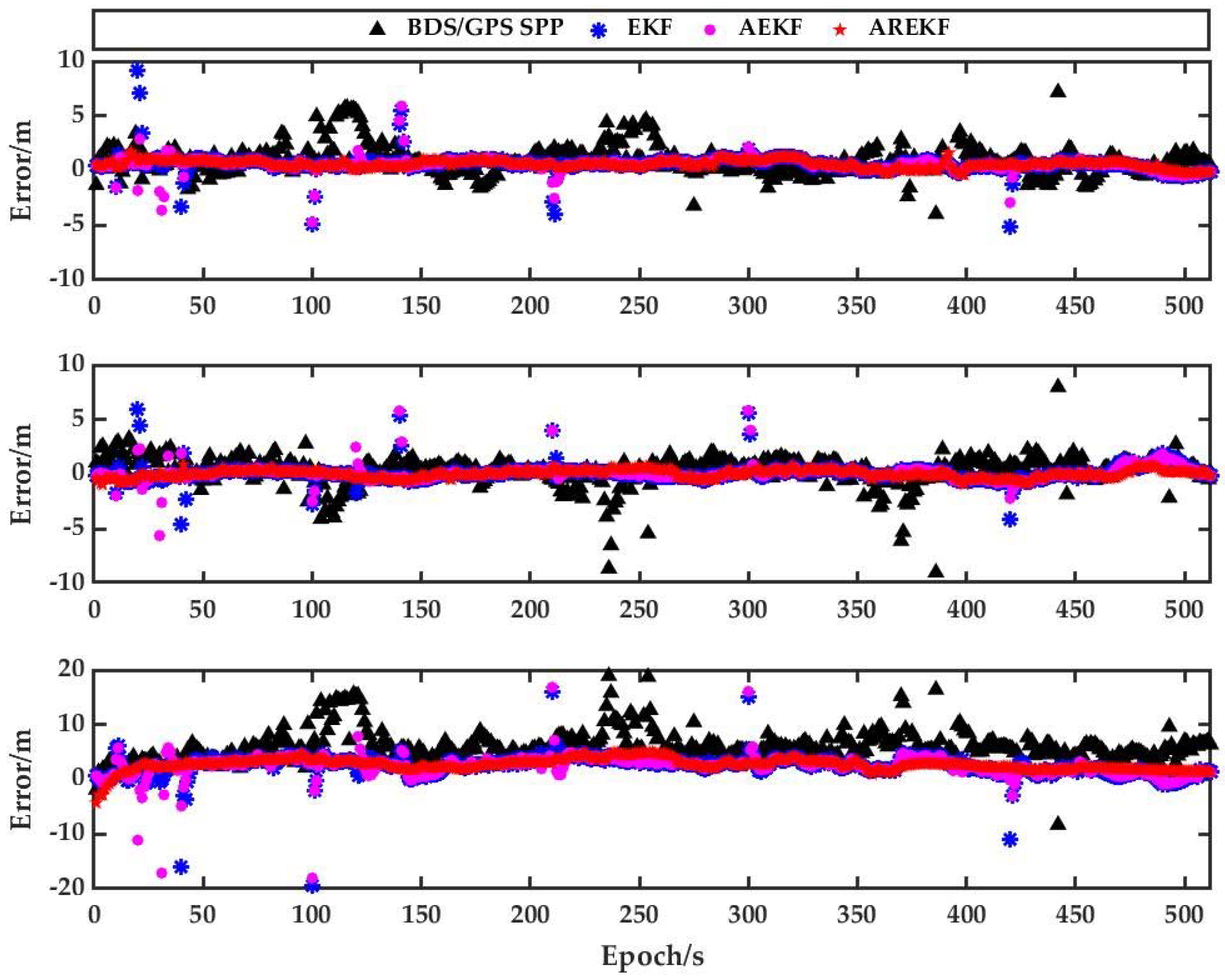
Figure 9 shows that the positioning errors of the trajectory of each scheme in the E, N and U directions are obtained by comparison with the real trajectory. Through the analysis of the positioning residuals, the conclusion is obtained that the BDS/GPS/UWB tightly coupled positioning proposed by this paper has the best positioning accuracy in any direction. The plane positioning accuracy can reach the decimeter level. At the same time, through the further analysis of
Figure 9, the following information is available: When the gross error detection and recognition algorithm proposed in this paper is not used, the BDS/GPS/UWB fusion positioning algorithm has obvious outliers (for example, the positioning results of some epochs of EKF and AEKF in
Figure 9 deviate significantly from the mean value); the robustness of the positioning system based on this algorithm proposed by this paper has been significantly improved compared with other positioning systems.
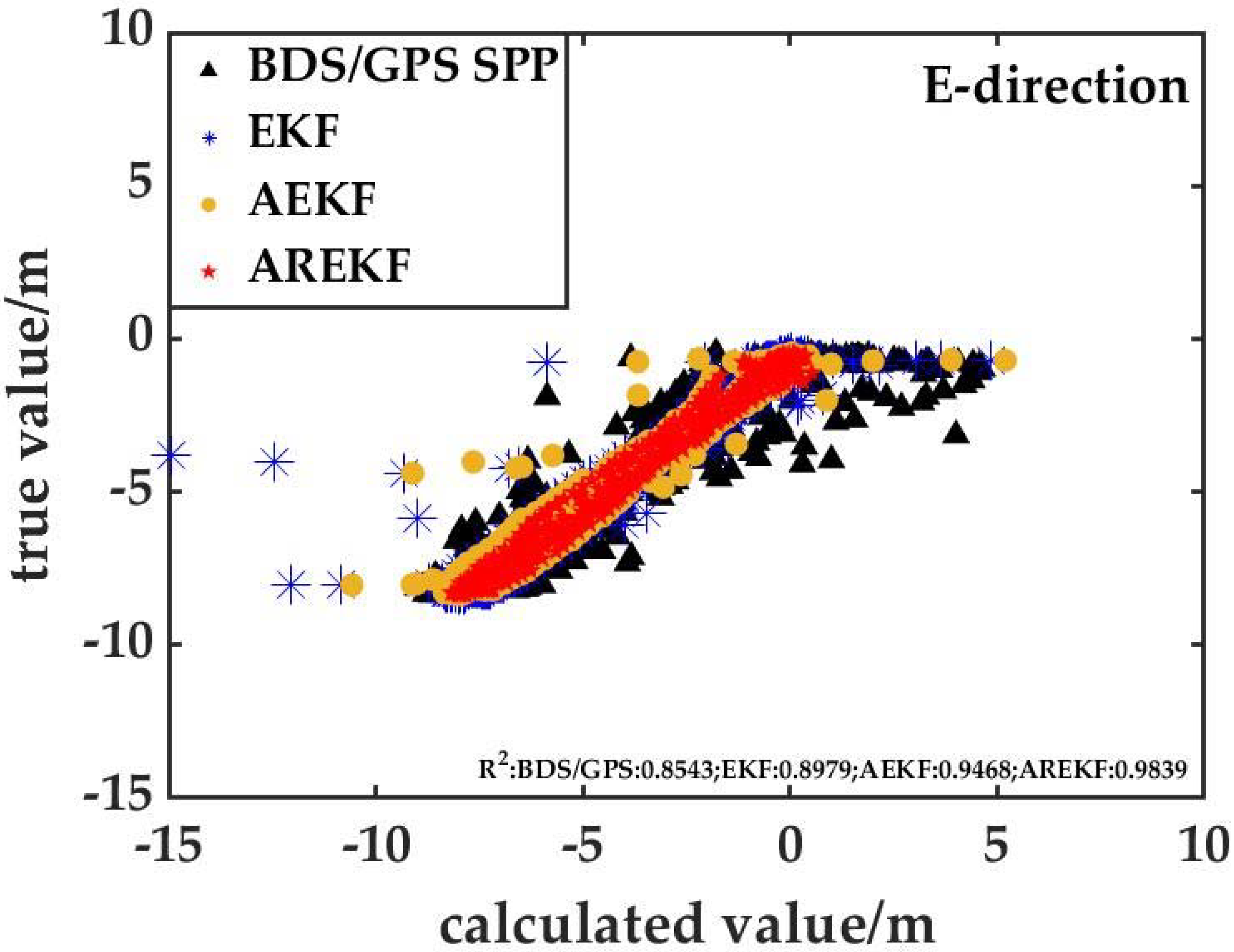
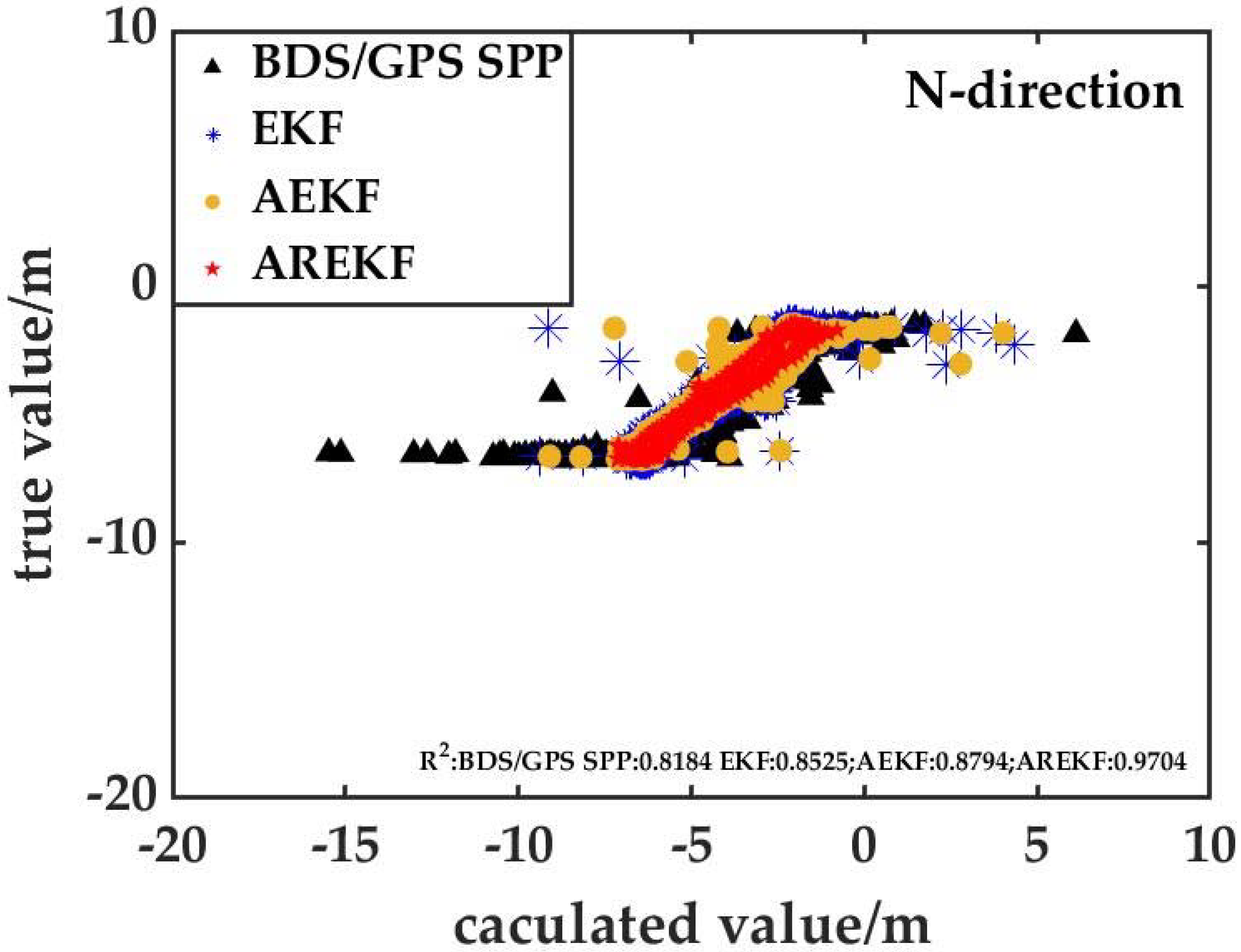
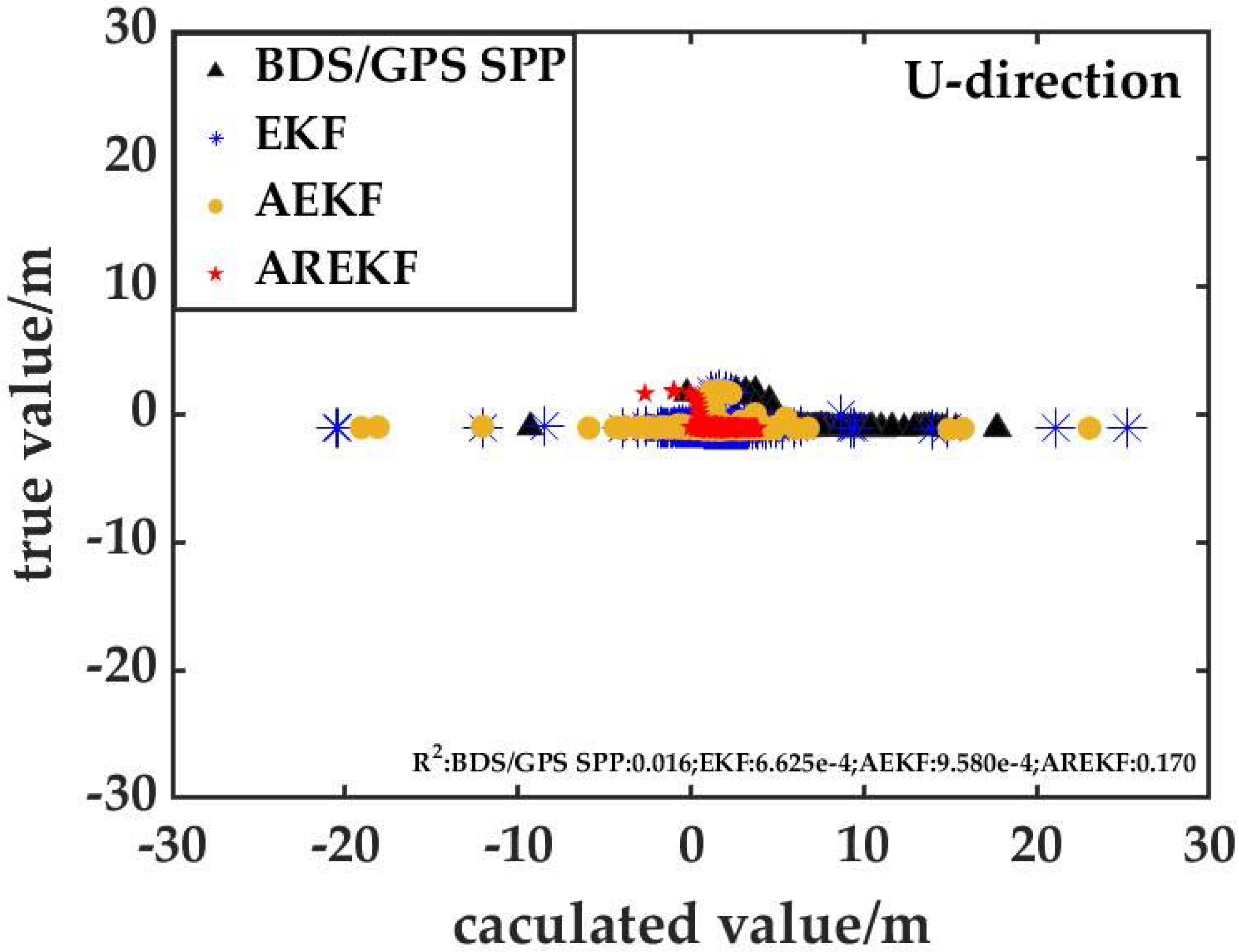
It can be seen from the analysis results (
Figure 10,
Figure 11 and
Figure 12) that the correlation between the BDS/GPS/UWB positioning results based on the proposed algorithm in this paper and the true value is obviously better than the other three positioning algorithms, which also proves the superiority of the algorithm in this paper. At the same time, through further analysis of
Figure 12, it can be seen that when pedestrian motion constraints are not attached. Due to the poor positioning accuracy of the BDS/GPS SPP and the UWB algorithms in the U direction, there are many outliers in the U direction of scheme 2 (BDS/GPS/UWB tightly coupled positioning based on EKF) and scheme 3 (BDS/GPS/UWB tightly coupled navigation with an environmental discrimination factor), which make the correlation between the positioning results of scheme 2 and scheme in the U direction and the true value poor. In addition, the true value is lower than that of the BDS/GPS SPP. Through the longitudinal comparative analysis of
Figure 10 and
Figure 12 or
Figure 11, it can be seen that the plane positioning accuracy of each scheme is significantly higher than that in U direction, which is consistent with the results of
Figure 9.
To quantify the positioning accuracy of each positioning scheme, this paper takes RMS as the accuracy evaluation index to count the accuracy values of each scheme (see
Table 1).
Table 1 shows that the accuracy of this algorithm proposed by this paper is significantly better than other algorithms. In the transition zone, the positioning bias in the E, N and U directions is better than 70 cm, 40 cm and 3 m, respectively. Compared with the BDS/GPS SPP algorithm, the accuracy of the E, N and U directions is improved by 57.8%, 76.0% and 56.5%, respectively. At the same time, the results show that the proposed algorithm can effectively eliminate the influence of the gross error (such as a UWB NLOS error) on the positioning results, and its positioning accuracy is improved by 44.6%, 60.5% and 17.6%, respectively, compared with the pure UWB positioning algorithm in the E, N and U directions. For the fusion navigation model, the positioning accuracy of the E direction is significantly lower than that of the N direction in the conventional EKF, AEKF and AREKF, which is highly consistent with the positioning results of pure UWB. From this analysis, it can be seen that there is an obvious correlation between the accuracy of the BDS/GPS/UWB fusion algorithm and the network shape of UWB base station.
4. Conclusions
Aiming to solve the problems of the low positioning accuracy of the BDS/GPS SPP and the influence of the gross error, such as a UWB NLOS error, on the positioning results, a BDS/GPS/UWB tightly coupled navigation model based on improved adaptively robust EKF with pedestrian motion characteristics constraints is proposed in this paper. Firstly, the environmental discrimination factor is constructed by using the mathematical characteristics of the observed values to realize the adaptive change of the dynamic model. Then, a robust factor is constructed based on the posteriori residual to resist the influence of gross error, such as NLOS error of the observation value, on the positioning results. At the same time, to improve the continuity and availability of the positioning results of the algorithm, the constraint information of pedestrian motion characteristics is constructed by exploring the physical characteristics of pedestrian motion.
In order to demonstrate the effectiveness and accuracy of the algorithm, this paper uses the measured data to carry out relevant experiments. The experimental results show that the positioning accuracy and continuity of the BDS/GPS/UWB tightly coupled navigation proposed by this paper is obviously better than that of other schemes, which effectively improved the availability and robustness of pedestrian positioning results in the transition area. At the same time, the experimental results show that the difference in the UWB base station spatial distribution will lead to the obvious difference in positioning accuracy in the E and N directions. Therefore, the authors will carry out optimization research on the spatial geometry of the UWB base station networks in order to further improve the availability of the fusion location algorithm.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}