
Comparing Fire Extent and Severity Mapping between Sentinel 2 and Landsat 8 Satellite Sensors


Abstract
:1. Introduction
2. Materials and Methods
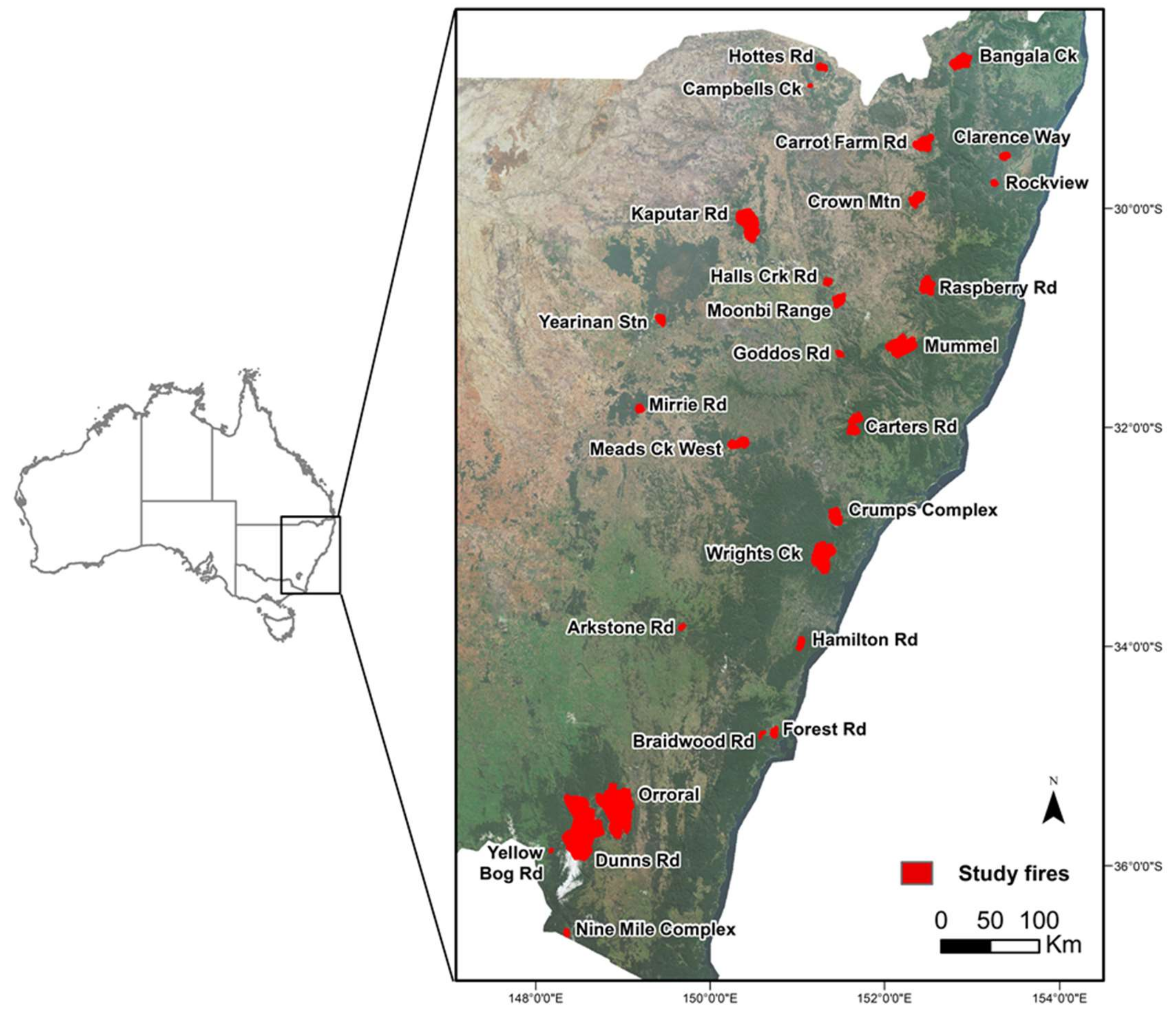
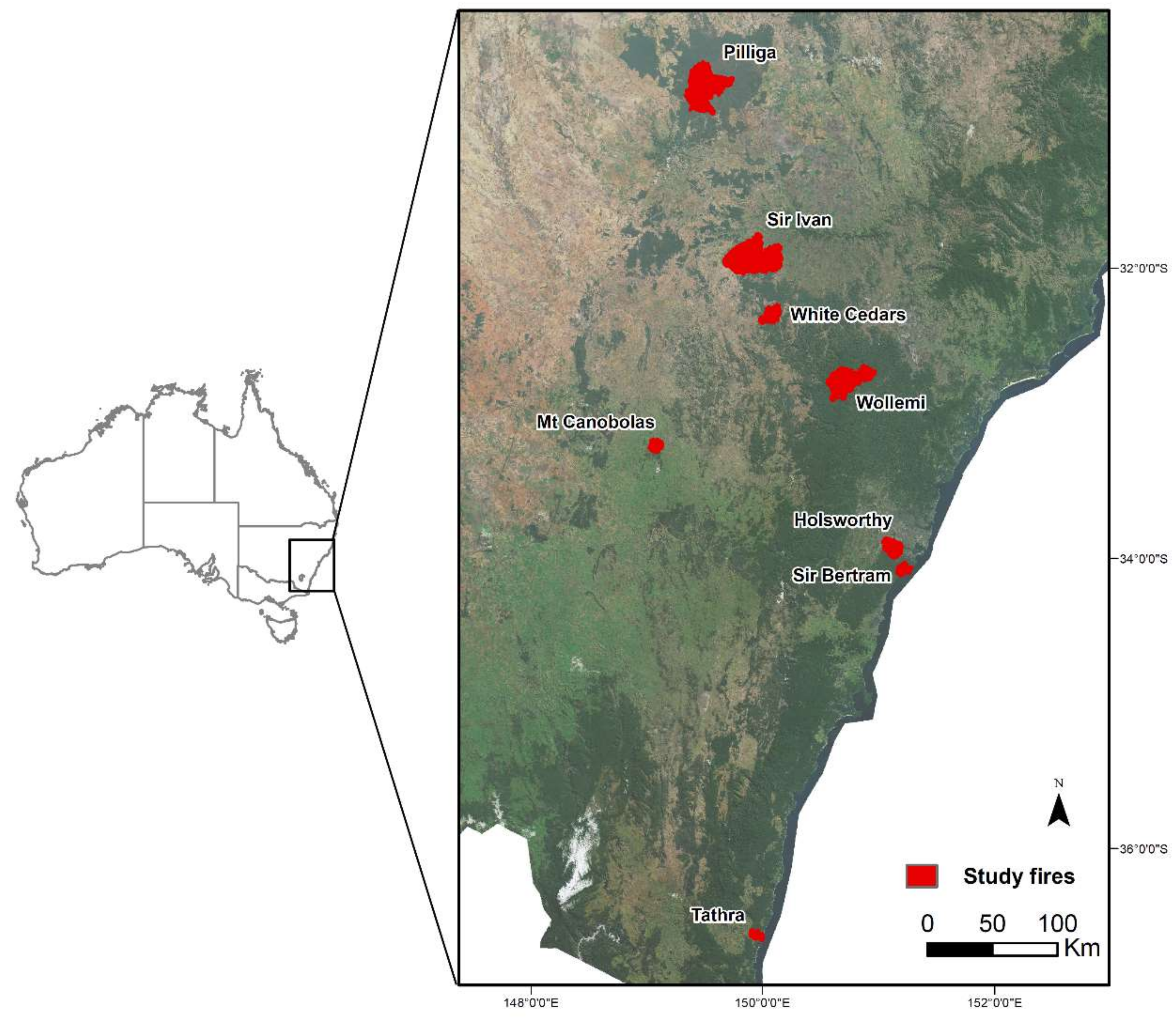
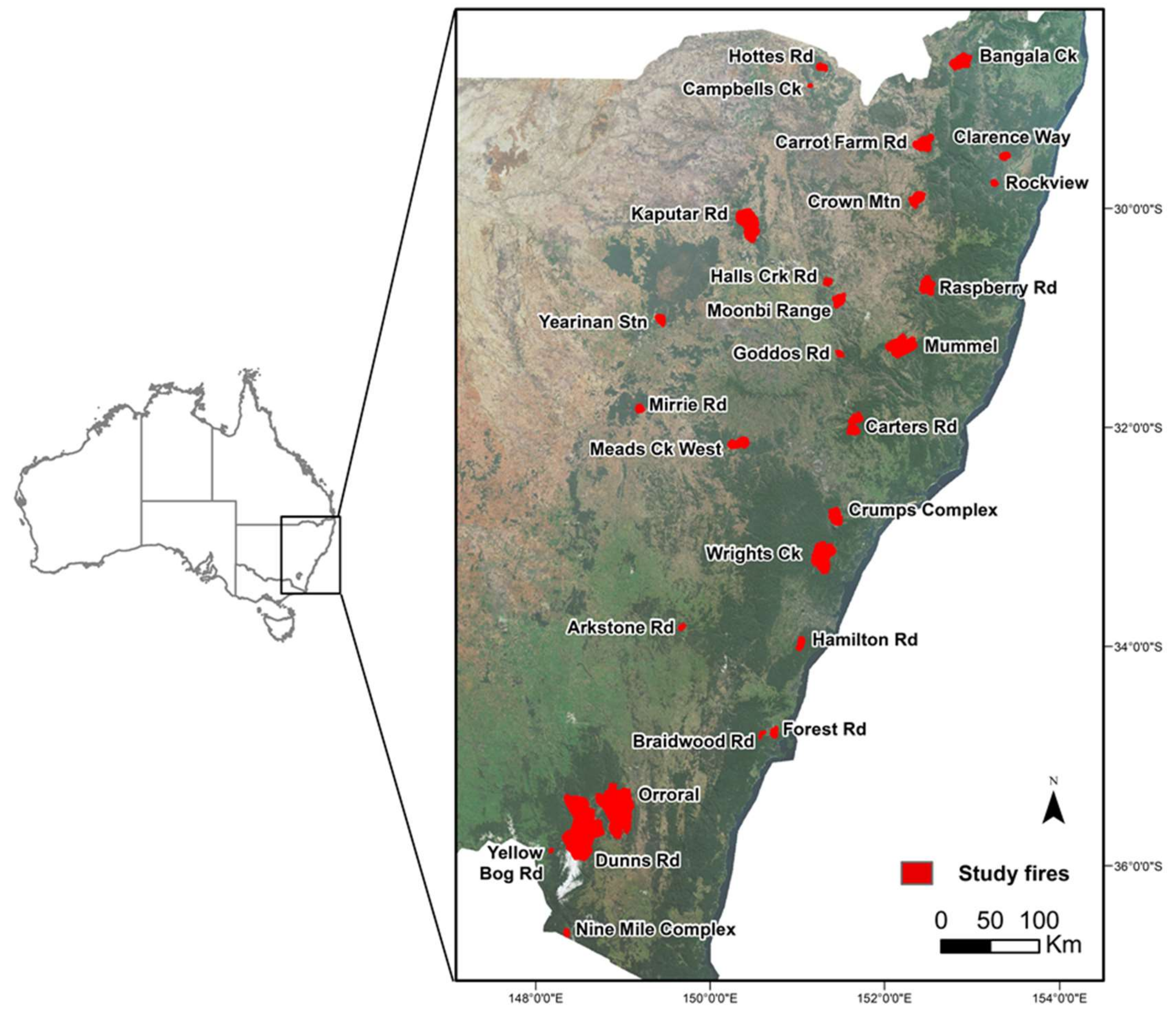
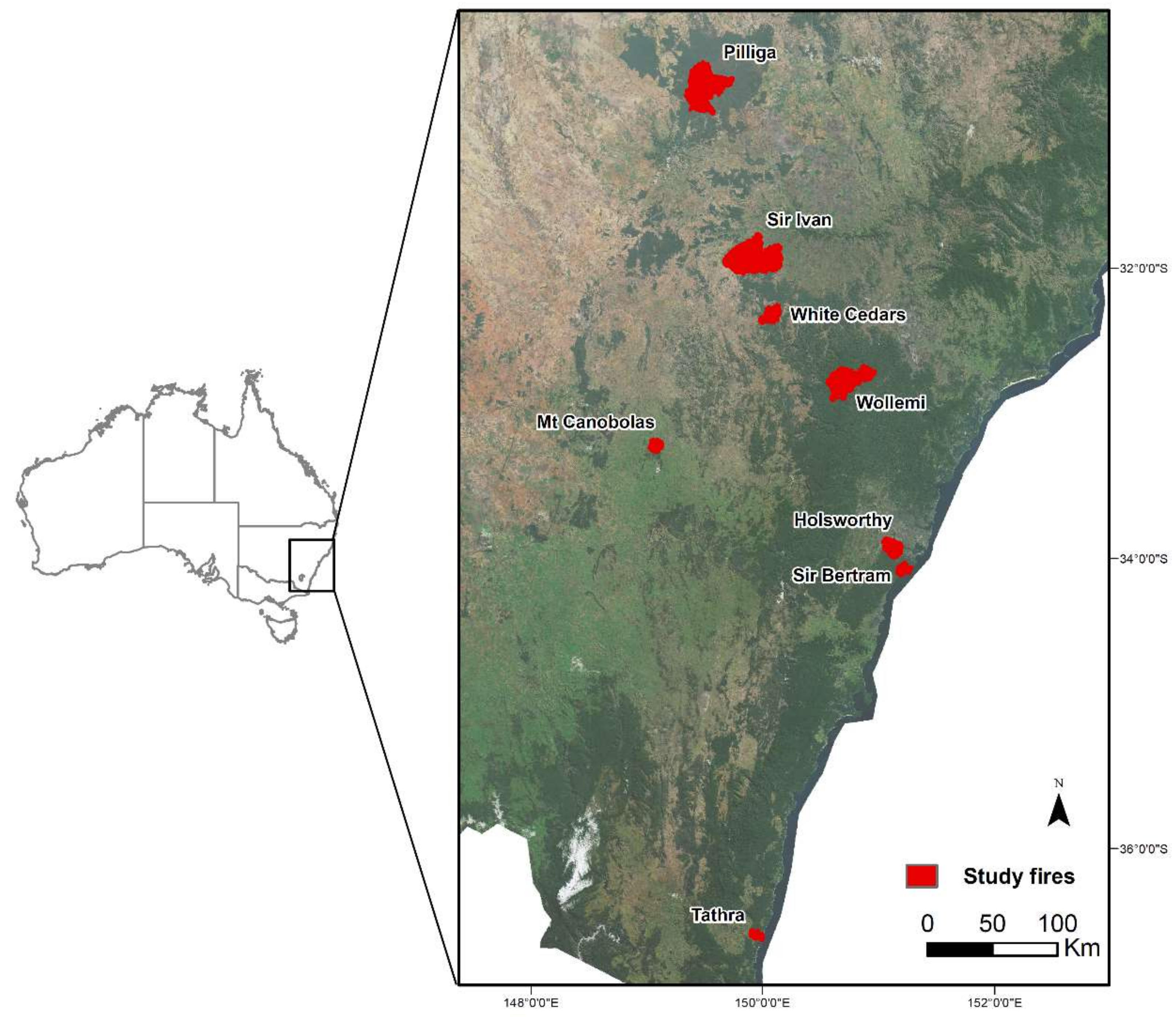
2.1. Study Area and Fire Selection
2.2. Imagery Pre-Processing
2.3. Fire Severity Mapping
2.4. Independent Accuracy Assessment
2.5. Area Comparisons
2.6. Statistical Agreement
2.7. Factors Influencing Similarity between Sensors
3. Results
3.1. Independent Accuracy Assessment
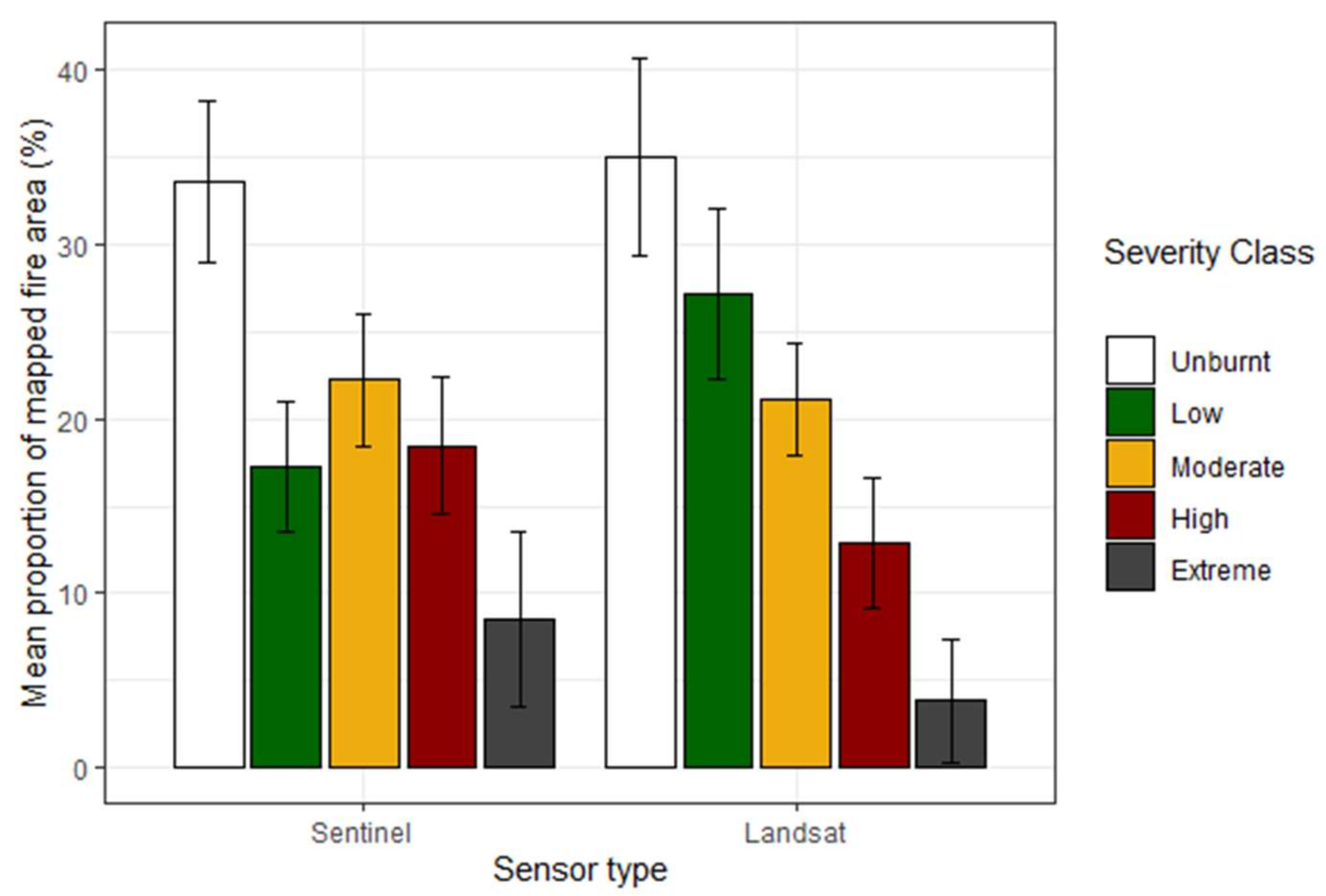
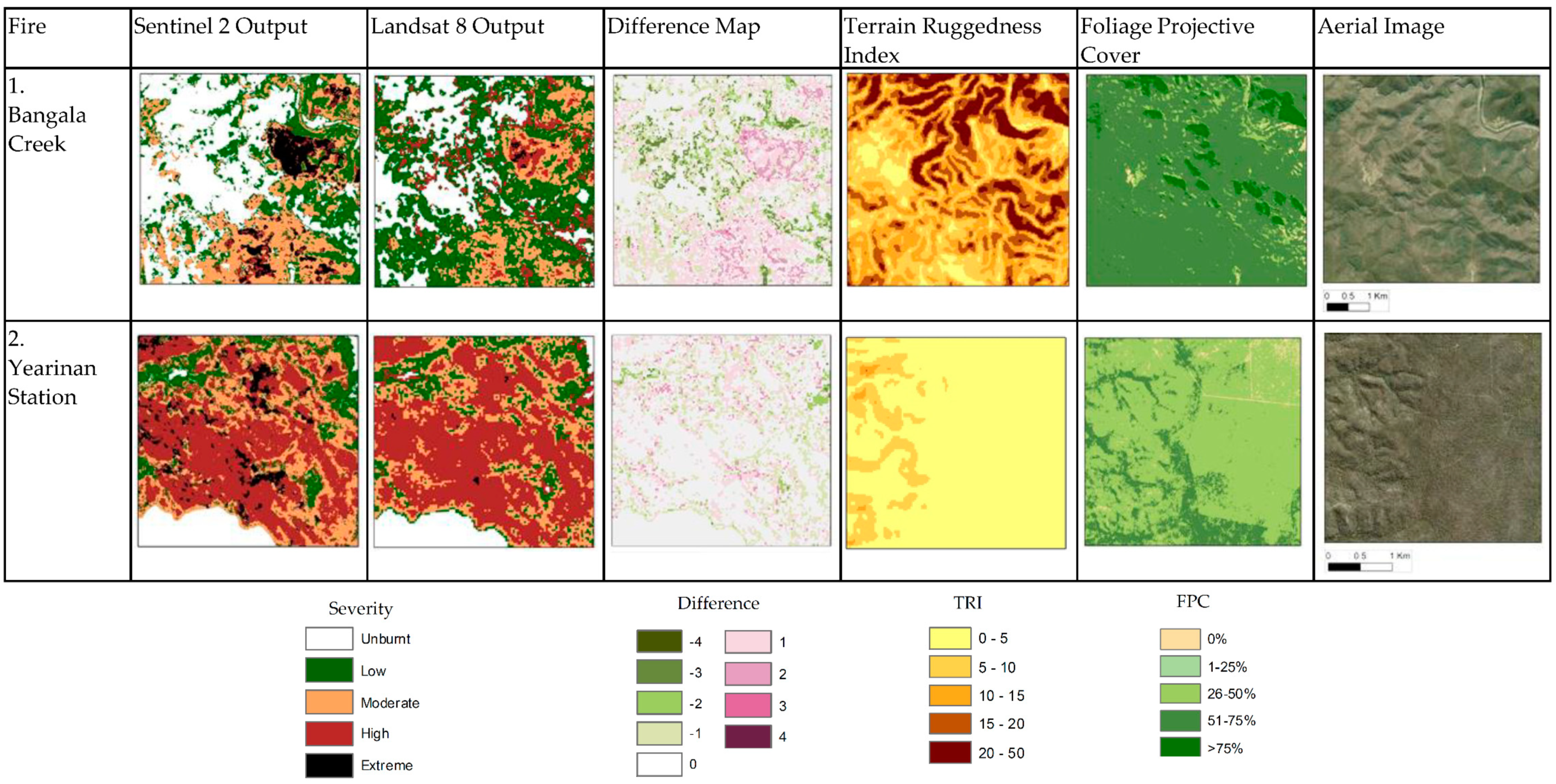
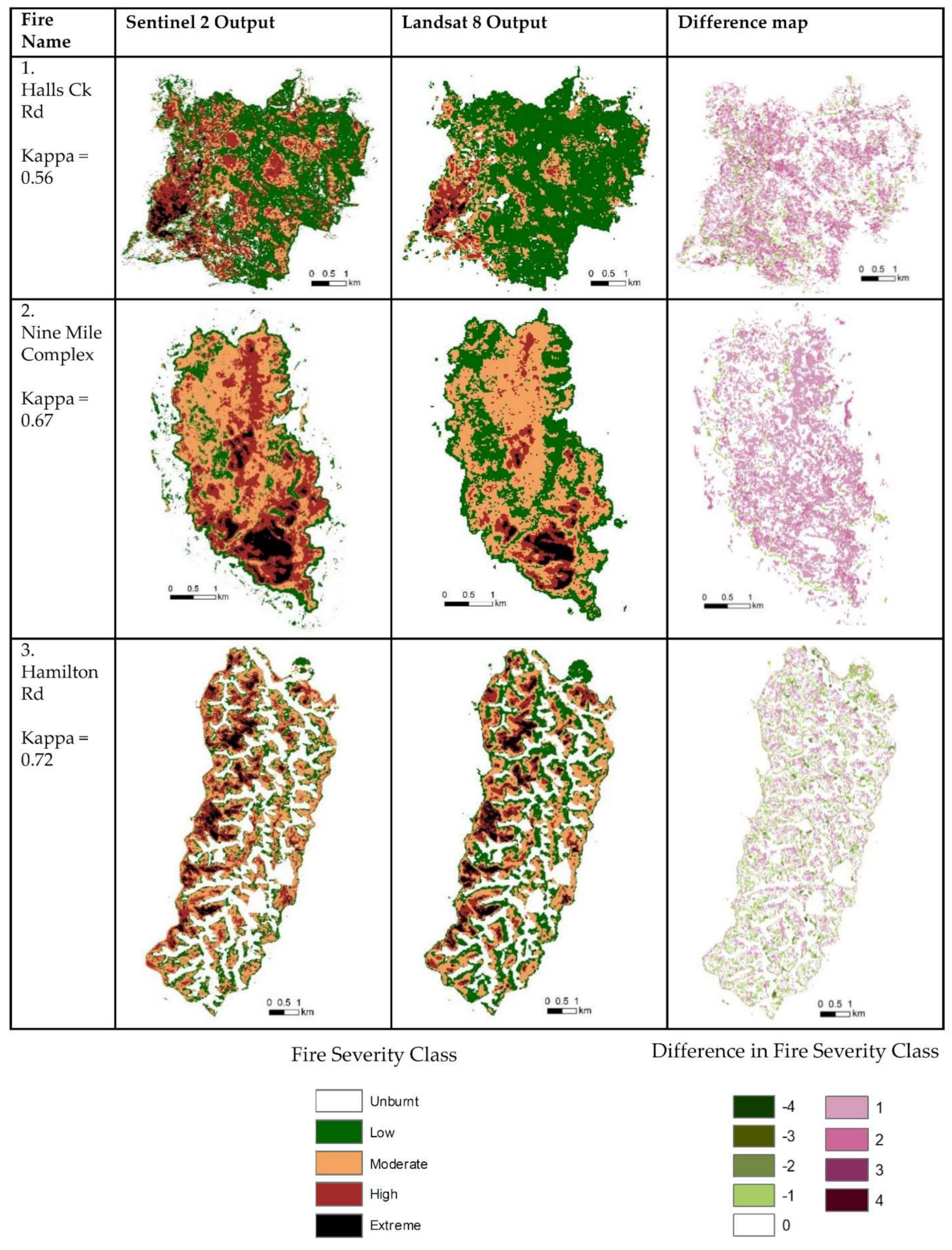
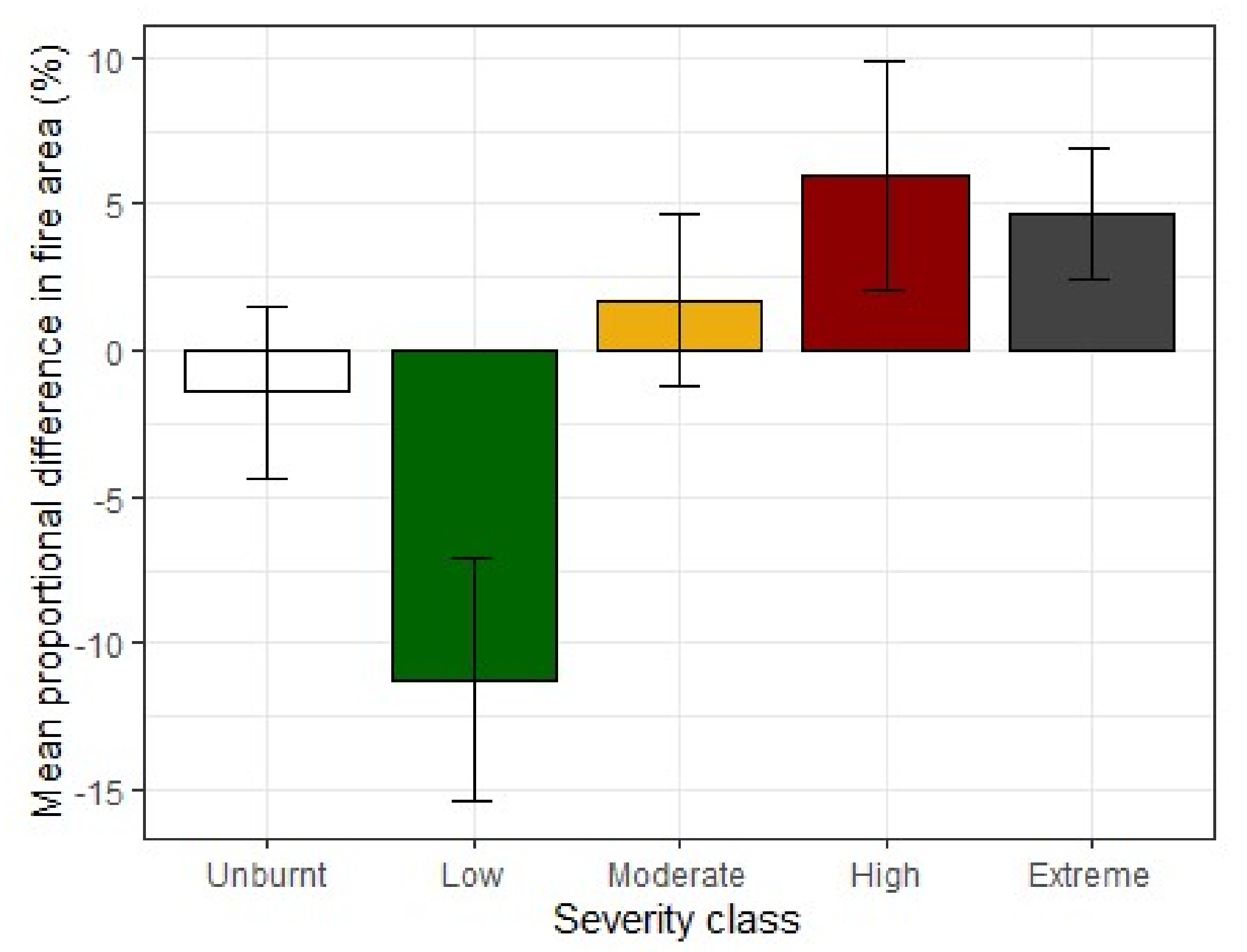
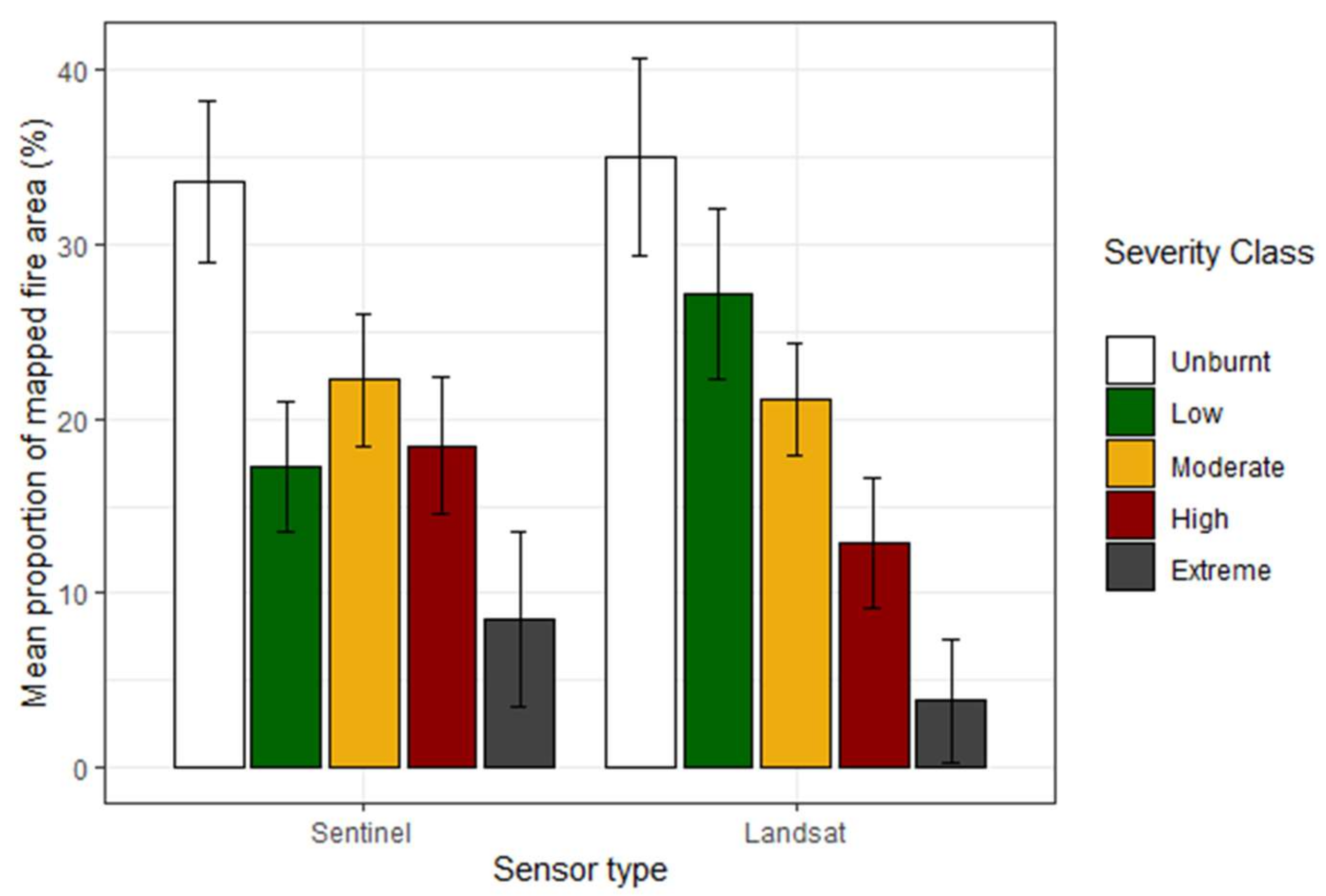
3.2. Area Comparisons
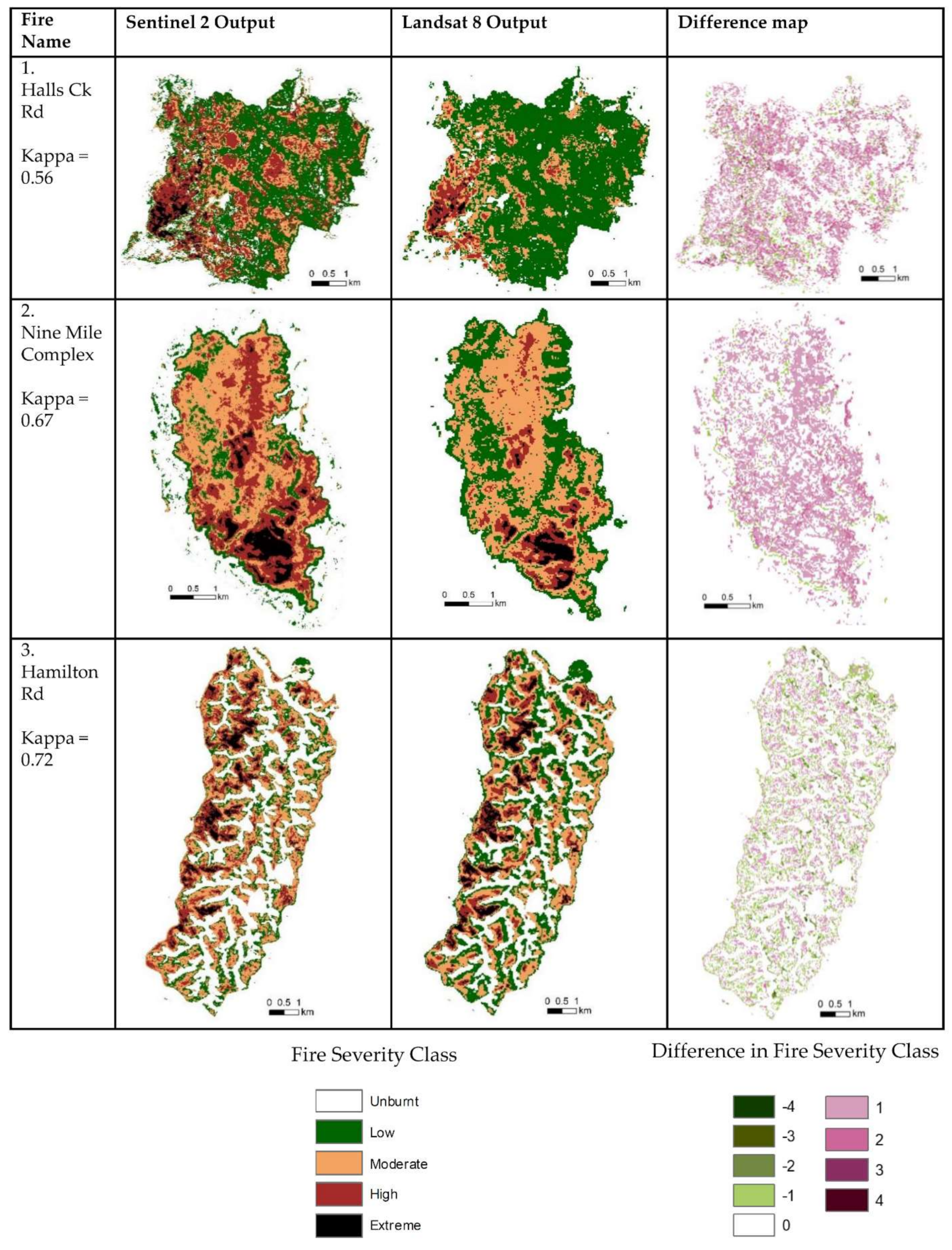
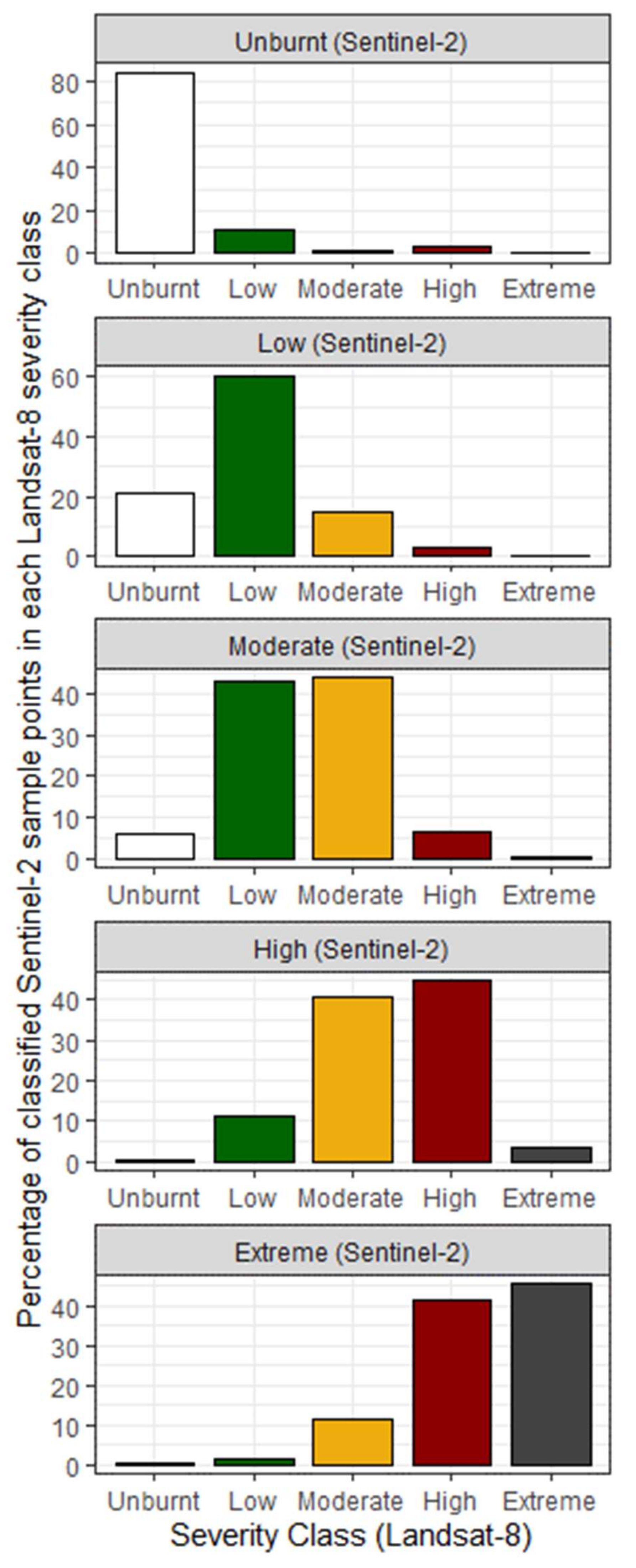
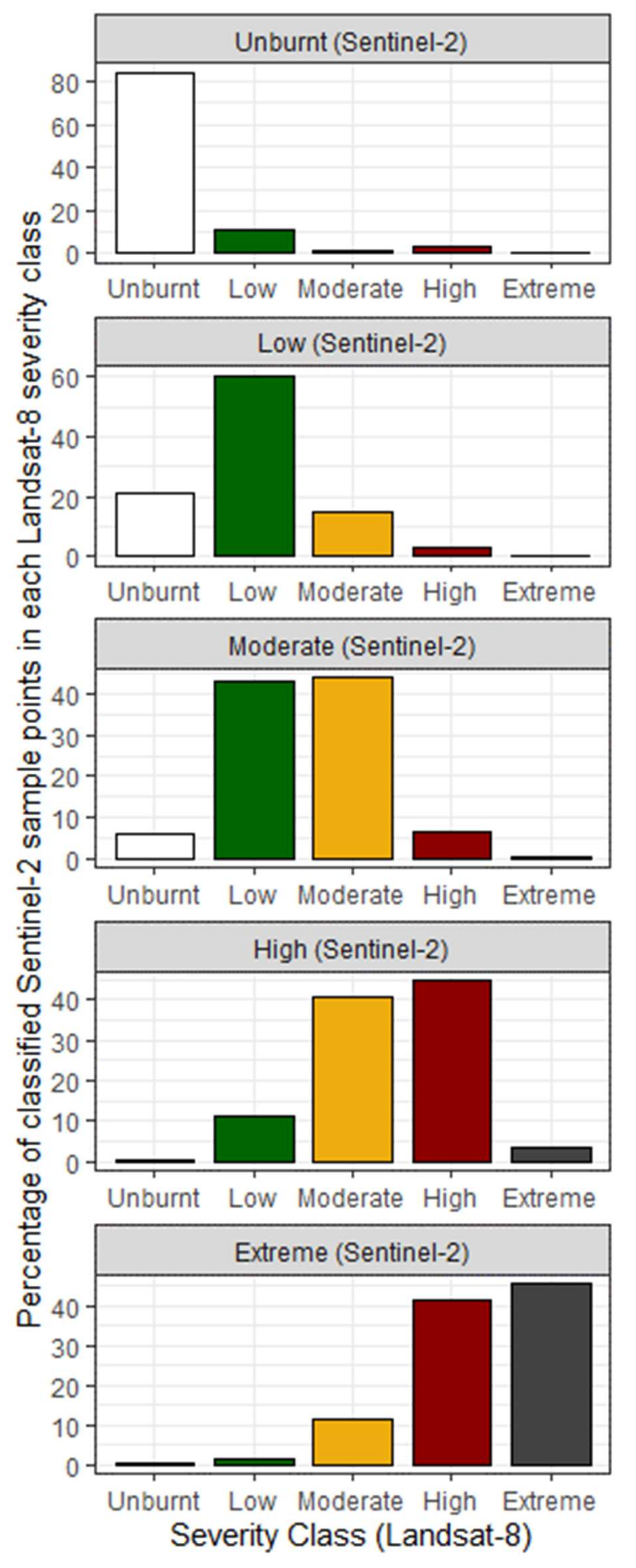
3.3. Statistical Agreement
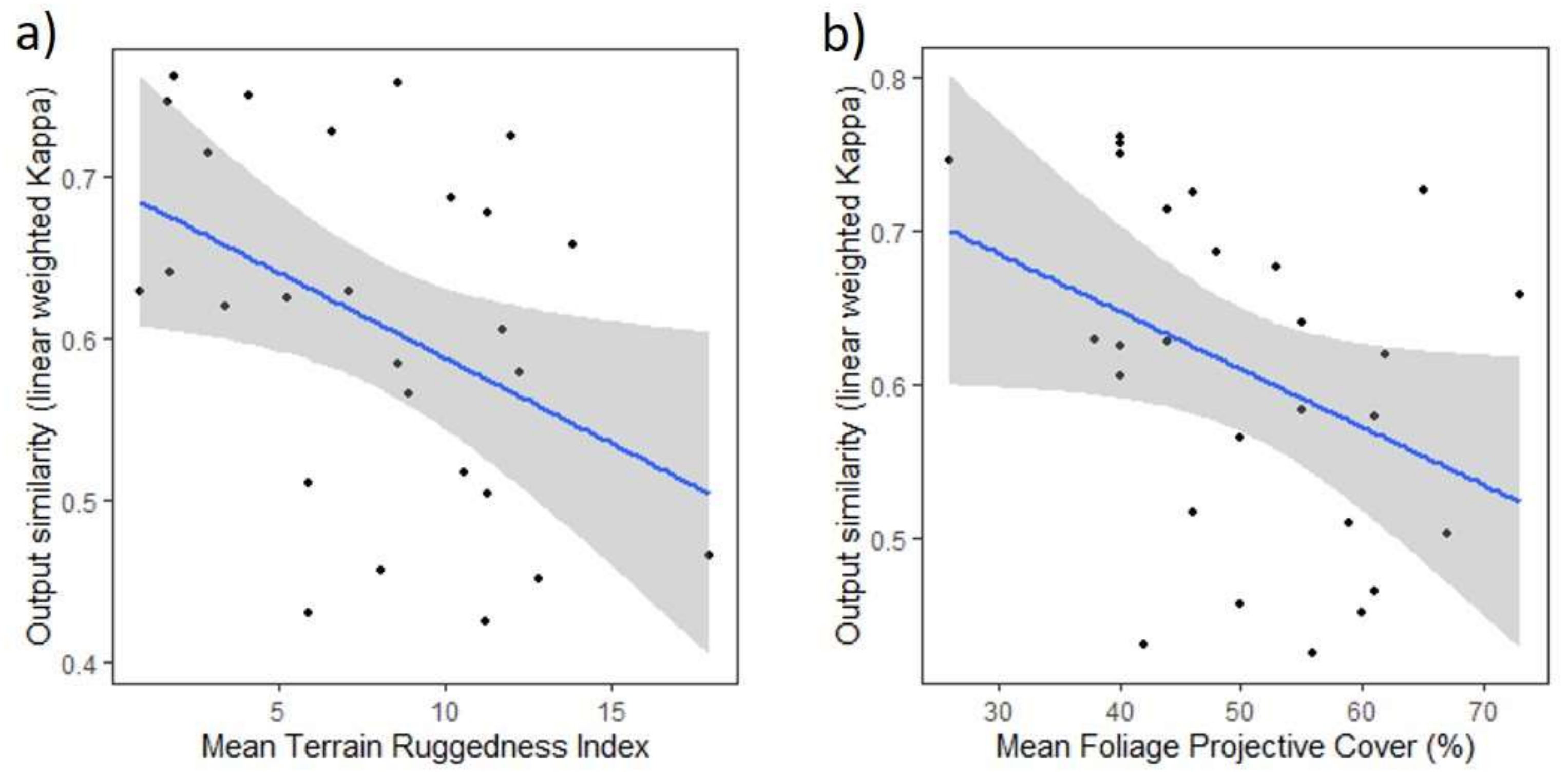
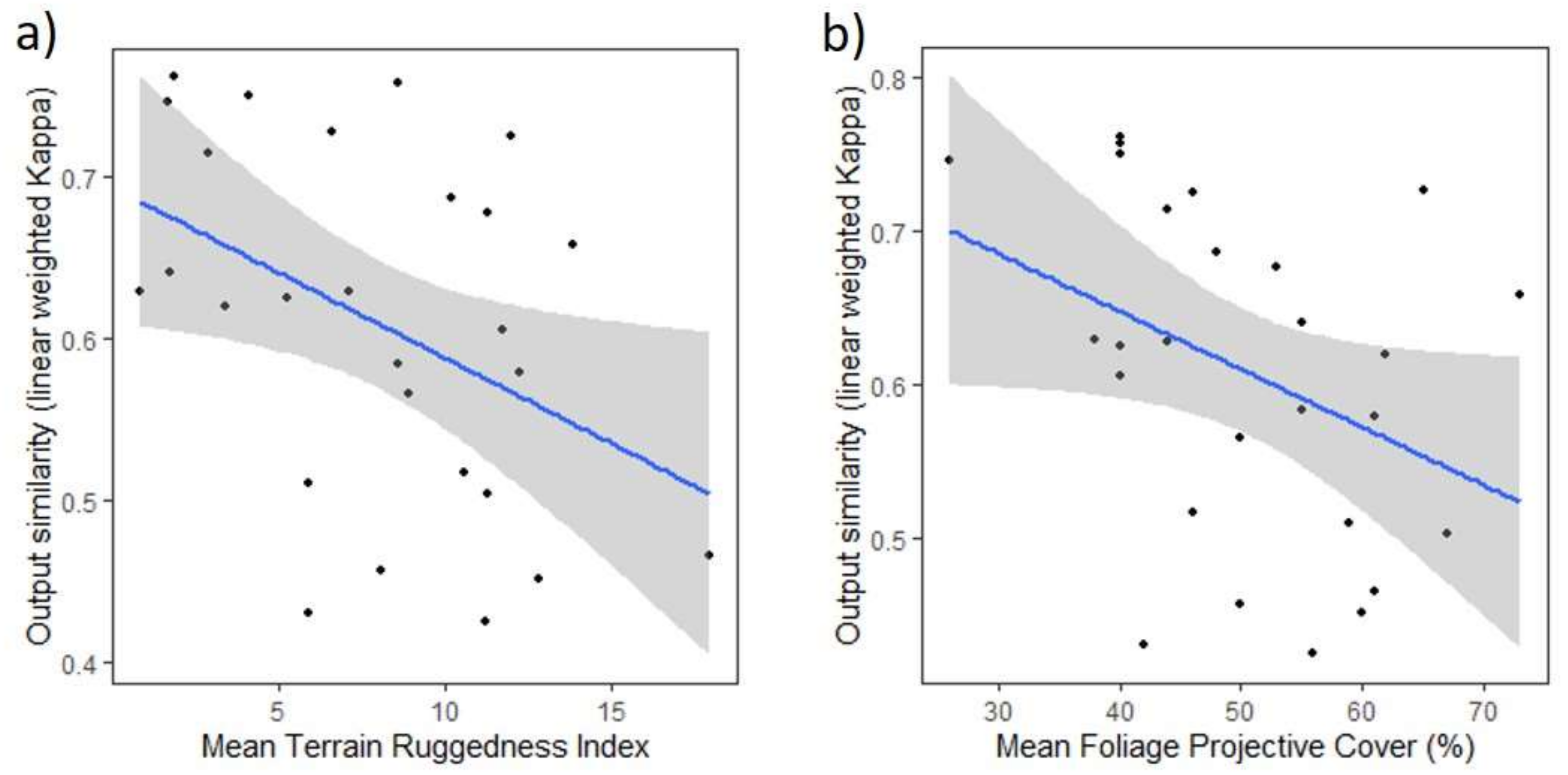
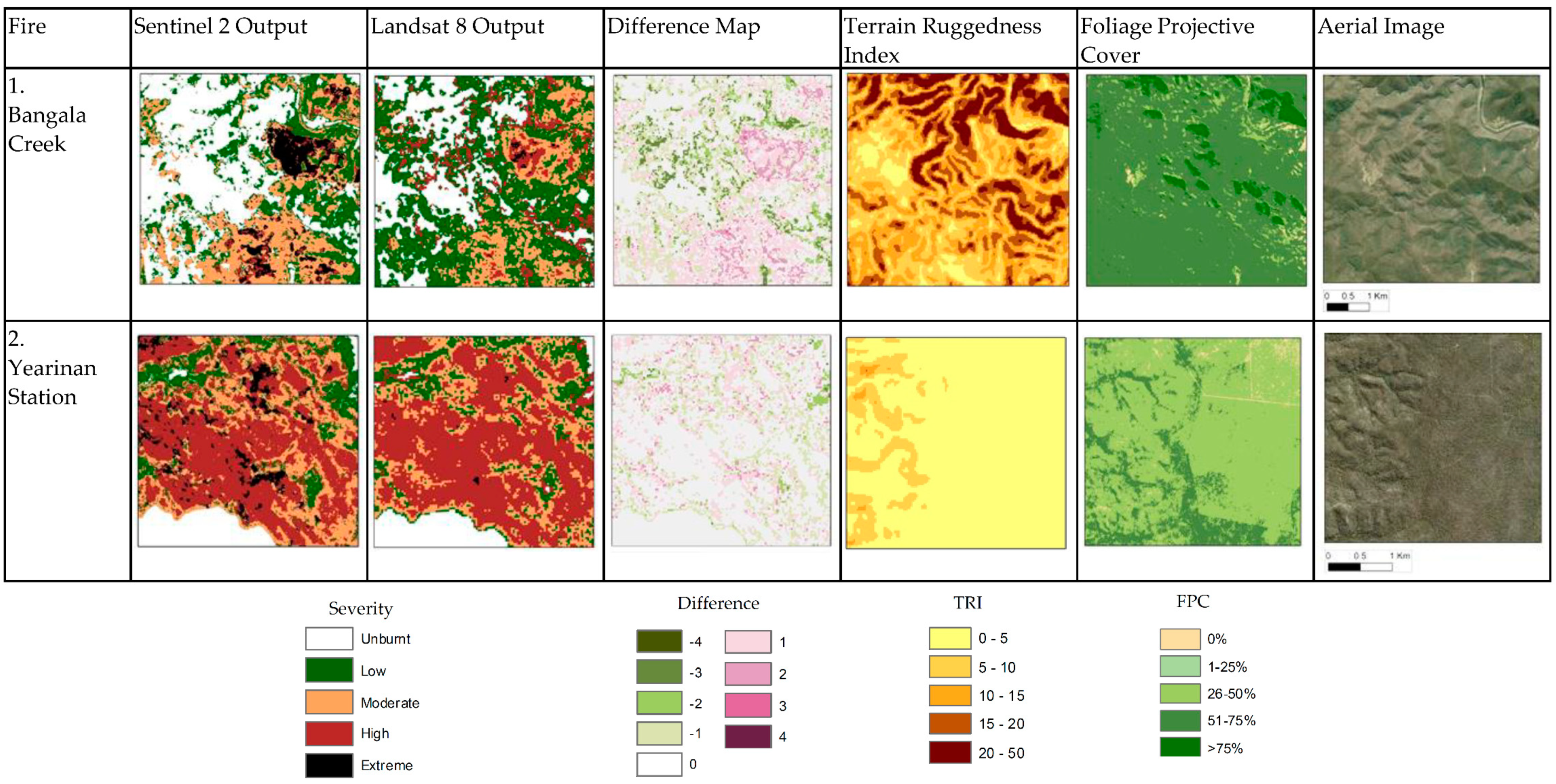
3.4. Factors Influencing Similarity between Sensors
4. Discussion
4.1. Fire Extent Mapping Similarity between Sensors
4.2. Fire Severity Mapping Similarity between Sensors
4.3. Landscape Factors Influencing Similarity between Sensors
4.4. Comparisons with Previous Studies
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teske, C.; Vanderhoof, M.K.; Hawbaker, T.J.; Noble, J.; Hiers, J.K. Using the Landsat Burned Area Products to Derive Fire History Relevant for Fire Management and Conservation in the State of Florida, Southeastern USA. Fire 2021, 4, 26. [Google Scholar] [CrossRef]
- Eidenshink, J.; Schwind, B.; Brewer, K.; Zhu, Z.; Quayle, B.; Howard, S. A Project for Monitoring Trends in Burn Severity. Fire Ecol. 2007, 3, 3–21. [Google Scholar] [CrossRef]
- McCarthy, G.; Moon, K.; Smith, L. Mapping fire severity and fire extent in forest in Victoria for ecological and fuel outcomes. Ecol. Manag. Restor. 2017, 18, 54–64. [Google Scholar] [CrossRef]
- Parks, S.A.; Holsinger, L.M.; Panunto, M.H.; Jolly, W.M.; Dobrowski, S.Z.; Dillon, G.K. High-severity fire: Evaluating its key drivers and mapping its probability across western US forests. Environ. Res. Lett. 2017, 13, 44037. [Google Scholar] [CrossRef]
- Fernandes, P.M.; Guiomar, N.; Rossa, C.G. Analysing eucalypt expansion in Portugal as a fire-regime modifier. Sci. Total Environ. 2019, 666, 79–88. [Google Scholar] [CrossRef] [PubMed]
- Loschiavo, J.; Cirulis, B.; Zuo, Y.; Hradsky, B.A.; Di Stefano, J. Mapping prescribed fire severity in south-east Australian eucalypt forests using modelling and satellite imagery: A case study. Int. J. Wildland Fire 2017, 26, 491–497. [Google Scholar] [CrossRef]
- Brewer, C.K.; Winne, J.C.; Redmond, R.L.; Opitz, D.W.; Mangrich, M.V. Classifying and Mapping Wildfire Severity. Photogramm. Eng. Remote Sens. 2005, 71, 1311–1320. [Google Scholar] [CrossRef] [Green Version]
- Geary, W.L.; Buchan, A.; Allen, T.; Attard, D.; Bruce, M.J.; Collins, L.; Ecker, T.E.; Fairman, T.A.; Hollings, T.; Loeffler, E.; et al. Responding to the biodiversity impacts of a megafire: A case study from south-eastern Australia’s Black Summer. Divers. Distrib. 2022, 28, 463–478. [Google Scholar] [CrossRef]
- Gordon, C.E.; Price, O.F.; Tasker, E.M. Mapping and exploring variation in post-fire vegetation recovery following mixed severity wildfire using airborne LiDAR. Ecol. Appl. 2017, 27, 1618–1632. [Google Scholar] [CrossRef] [PubMed]
- Walker, R.B.; Coop, J.D.; Downing, W.M.; Krawchuk, M.A.; Malone, S.L.; Meigs, G.W. How Much Forest Persists Through Fire? High-Resolution Mapping of Tree Cover to Characterize the Abundance and Spatial Pattern of Fire Refugia Across Mosaics of Burn Severity. Forests 2019, 10, 782. [Google Scholar] [CrossRef] [Green Version]
- French, N.H.F.; Kasischke, E.S.; Hall, R.J.; Murphy, K.A.; Verbyla, D.L.; Hoy, E.E.; Allen, J.L. Using Landsat data to assess fire and burn severity in the North American boreal forest region: An overview and summary of results. Int. J. Wildland Fire 2008, 17, 443–462. [Google Scholar] [CrossRef]
- Efthimiou, N.; Psomiadis, E.; Panagos, P. Fire severity and soil erosion susceptibility mapping using multi-temporal Earth Observation data: The case of Mati fatal wildfire in Eastern Attica, Greece. Catena 2020, 187, 104320. [Google Scholar] [CrossRef]
- Fox, D.M.; Maselli, F.; Carrega, P. Using SPOT images and field sampling to map burn severity and vegetation factors affecting post forest fire erosion risk. Catena 2008, 75, 326–335. [Google Scholar] [CrossRef]
- Coppoletta, M.; Merriam, K.E.; Collins, B.M. Post-fire vegetation and fuel development influences fire severity patterns in reburns. Ecol. Appl. 2016, 26, 686–699. [Google Scholar] [CrossRef] [PubMed]
- Hessl, A.E. Pathways for climate change effects on fire: Models, data, and uncertainties. Prog. Phys. Geogr. Earth Environ. 2011, 35, 393–407. [Google Scholar] [CrossRef]
- Sommers, W. Fire history, fire regimes, and climate change–integrating information for management and planning. Nat. Preced. 2010. [Google Scholar] [CrossRef] [Green Version]
- Flannigan, M.D.; Krawchuk, M.A.; de Groot, W.J.; Wotton, B.M.; Gowman, L.M. Implications of changing climate for global wildland fire. Int. J. Wildland Fire 2009, 18, 483–507. [Google Scholar] [CrossRef]
- Gibson, R.; Danaher, T.; Hehir, W.; Collins, L. A remote sensing approach to mapping fire severity in south-eastern Australia using sentinel 2 and random forest. Remote Sens. Environ. 2020, 240, 111702. [Google Scholar] [CrossRef]
- Collins, L.; Griffioen, P.; Newell, G.; Mellor, A. The utility of Random Forests for wildfire severity mapping. Remote Sens. Environ. 2018, 216, 374–384. [Google Scholar] [CrossRef]
- Dixon, D.J.; Callow, J.N.; Duncan, J.M.A.; Setterfield, S.A.; Pauli, N. Regional-scale fire severity mapping of Eucalyptus forests with the Landsat archive. Remote Sens. Environ. 2022, 270, 112863. [Google Scholar] [CrossRef]
- Belenguer-Plomer, M.A.; Tanase, M.A.; Fernandez-Carrillo, A.; Chuvieco, E. Burned area detection and mapping using Sentinel-1 backscatter coefficient and thermal anomalies. Remote Sens. Environ. 2019, 233, 111345. [Google Scholar] [CrossRef]
- Montorio, R.; Pérez-Cabello, F.; Borini Alves, D.; García-Martín, A. Unitemporal approach to fire severity mapping using multispectral synthetic databases and Random Forests. Remote Sens. Environ. 2020, 249, 112025. [Google Scholar] [CrossRef]
- Department of Planning, Industry and Environment (DPIE). Fire Extent and Severity Mapping-Annual Report for the 2019–2020, 2018–2019 and 2017–2018 Fire Years; Department of Planning Industry and Environment: Parramatta, NSW, Australia, 2020. Available online: https://www.environment.nsw.gov.au/-/media/OEH/Corporate-Site/Documents/Animals-and-plants/Native-vegetation/fire-extent-and-severity-mapping-annual-report-2017-18-2019-20-210180.pdf (accessed on 30 January 2022).
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 Using Surface Reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef] [Green Version]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef] [Green Version]
- Vuolo, F.; Zoltak, M.; Pipitone, C.; Zappa, L.; Wenng, H.; Immitzer, M.; Weiss, M.; Baret, F.; Atzberger, C. Data Service Platform for Sentinel-2 Surface Reflectance and Value-Added Products: System Use and Examples. Remote Sens. 2016, 8, 938. [Google Scholar] [CrossRef] [Green Version]
- Archour, H.; Toujani, A.; Trabelsi, H.; Jaouadi, W. Evaluation and comparison of Sentinel-2 MSI, Landsat 8 OLI, and EFFIS data for forest fires mapping. Illustrations from the summer 2017 fires in Tunisia. Geocarto Int. 2021, 1–20. [Google Scholar] [CrossRef]
- Mallinis, G.; Mitsopoulos, I.; Chrysafi, I. Evaluating and comparing Sentinel 2A and Landsat-8 Operational Land Imager (OLI) spectral indices for estimating fire severity in a Mediterranean pine ecosystem of Greece. GIScience Remote Sens. 2018, 55, 1–18. [Google Scholar] [CrossRef]
- Flood, N.; Danaher, T.; Gill, T.; Gillingham, S. An operational scheme for deriving standardised surface reflectance from Landsat TM/ETM+ and SPOT HRG imagery for eastern Australia. Remote Sens. 2013, 5, 83–109. [Google Scholar] [CrossRef] [Green Version]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef] [Green Version]
- Gallant, J.; Read, A. Enhancing the SRTM Data for Australia. In Proceedings of the Geomorphometry, Zurich, Switzerland, 31 August–2 September 2009; Available online: https://geomorphometry.org/gallantread2009 (accessed on 30 January 2022).
- Guerschman, J.P.; Scarth, P.F.; McVicar, T.R.; Renzullo, L.J.; Malthus, T.J.; Stewart, J.B.; Rickards, J.E.; Trevithick, R. Assessing the effects of site heterogeneity and soil properties when unmixing photosynthetic vegetation, non-photosynthetic vegetation and bare soil fractions from Landsat and MODIS data. Remote Sens. Environ. 2015, 161, 12–26. [Google Scholar] [CrossRef]
- Hammill, K.A.; Bradstock, R.A. Remote sensing of fire severity in the Blue Mountains: Influence of vegetation type and inferring fire intesity. Int. J. Wildland Fire 2006, 15, 213–226. [Google Scholar] [CrossRef]
- Hudak, A.T.; Robichaud, P.R.; Evans, J.S.; Clark, J.; Lannom, K.; Morgan, P.; Stone, C. Field validation of burned area reflectance classification (BARC) products for post fire assessment. In Proceedings of the Remote Sensing for Field Users: Proceedings of the Tenth Forest Service Remote Sensing Applications Conference, Salt Lake City, UT, USA, 5–9 April 2004; Available online: https://www.fs.usda.gov/treesearch/pubs/23530 (accessed on 30 January 2022).
- Kuhn, M. Classification and Regression Training (Package ‘Caret’). 2019. Available online: https://CRAN.R-project.org/package=caret (accessed on 30 January 2022).
- Breiman, L.; Cutler, A. Breiman and Cutler’s Random Forest for Classification and Regression (Package ‘RandomForest’). 2018. Available online: https://CRAN.R-project.org/package=randomForest (accessed on 30 January 2022).
- Vanbelle, S. A New Interpretation of the Weighted Kappa Coefficients. Psychometrika 2016, 81, 399–410. [Google Scholar] [CrossRef] [PubMed]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021; Available online: https://www.R-project.org/ (accessed on 30 January 2022).
- Wilson, M.F.J.; O’Connell, B.; Brown, C.; Guinan, J.C.; Grehan, A.J. Multiscale Terrain Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope. Mar. Geod. 2007, 30, 3–35. [Google Scholar] [CrossRef] [Green Version]
- Amatulli, G.; Domisch, S.; Tuanmu, M.-N.; Parmentier, B.; Ranipeta, A.; Malczyk, J.; Jetz, W. A suite of global, cross-scale topographic variables for environmental and biodiversity modeling. Sci. Data 2018, 5, 180040. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Armston, J.D.; Denham, R.; Danaher, T.; Scarth, P.; Moffiet, T.N. Prediction and validation of foliage projective cover from Landsat-5 TM and Landsat-7 ETM+ imagery. J. Appl. Remote Sens. 2009, 3, 033540. [Google Scholar] [CrossRef]
- Fisher, A.; Day, M.; Gill, T.; Roff, A.; Danaher, T.; Flood, N. Large-area, highresolution tree cover mapping with multi-temporal SPOT5 imagery, New South Wales, Australia. Remote Sens. 2016, 8, 515. [Google Scholar] [CrossRef] [Green Version]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [Green Version]
- Munyati, C. The potential for integrating Sentinel 2 MSI with SPOT 5 HRG and Landsat 8 OLI imagery for monitoring semi-arid savannah woody cover. Int. J. Remote Sens. 2017, 38, 4888–4913. [Google Scholar] [CrossRef]
- Naegeli, K.; Damm, A.; Huss, M.; Wulf, H.; Schaepman, M.; Hoelzle, M. Cross-Comparison of Albedo Products for Glacier Surfaces Derived from Airborne and Satellite (Sentinel-2 and Landsat 8) Optical Data. Remote Sens. 2017, 9, 110. [Google Scholar] [CrossRef] [Green Version]
- Van der Werff, H.; Van der Meer, F. Sentinel-2A MSI and Landsat 8 OLI Provide Data Continuity for Geological Remote Sensing. Remote Sens. 2016, 8, 883. [Google Scholar] [CrossRef] [Green Version]
- Korhonen, L.; Hadi Packalen, P.; Rautiainen, M. Comparison of Sentinel-2 and Landsat 8 in the estimation of boreal forest canopy cover and leaf area index. Remote Sens. Environ. 2017, 195, 259–274. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel 2 | Landsat 8 | |||||
|---|---|---|---|---|---|---|
| Imagery availability | Late 2015–present | 2013–present | ||||
| Imagery resolution (pixel size) | 10 m (20 m for SWIR bands) | 30 m | ||||
| Sensor revisit time | Every 5 days | Every 16 days | ||||
| Timeframe used for FESM | 2017–2018 fire year to present | 2016–2017 fire year and prior | ||||
| Spectral wavelengths (nanometers) | Blue: | 458–522 | (band 2) | Blue: | 450–510 | (band 2) |
| Green: | 543–578 | (band 3) | Green: | 530–590 | (band 3) | |
| Red: | 650–680 | (band 4) | Red: | 640–670 | (band 4) | |
| NIR: | 785–900 | (band 8) | NIR: | 850–880 | (band 5) | |
| SWIR1: | 1565–1655 | (band 11) | SWIR1: | 1570–1650 | (band 6) | |
| SWIR2: | 2100–2280 | (band 12) | SWIR2: | 2110–2290 | (band 7) | |
| Pixel Colour | Severity Class | Definition | % Foliage Fire Affected |
|---|---|---|---|
 | Unburnt | Unburnt | 0% canopy and understory burnt |
 | Low | Burnt surface with unburnt canopy | >10% burnt understory >90% green canopy |
 | Moderate | Partial canopy scorch | 20–90% canopy scorch |
 | High | Full canopy scorch (+/− partial canopy consumption) | >90% canopy scorched <50% canopy biomass consumed |
 | Extreme | Full canopy consumption | >50% canopy biomass consumed |
| Candidate Factor | Data Source | Calculation Method |
|---|---|---|
| Terrain Ruggedness Index (TRI) | DEM-derived terrain ruggedness index [39] | Mean value calculated for each study fire FESM output area in ArcGIS (zonal statistics) |
| Woody Foliage Projective Cover (FPC) | NSW Woody Vegetation Extent & Foliage Projective Cover 2011 [42] | Mean value calculated for each study fire FESM output area in ArcGIS (zonal statistics) |
| Time between matched image dates | Selected images from each sensor type | Mean and maximum difference in days between matched pre- and post-fire images for each study fire |
| Time between pre- and post-fire image dates | Selected images from each sensor type | No of days between pre- and post-fire imagery, averaged between sensor types |
| Distance from training locations | Training data shapefiles | Distances from both sets of training fires (Landsat 8 and Sentinel 2) were calculated for each study fire in ArcGIS (near function) |
| Fire size (Ha) | FESM outputs | Total fire extent (Ha) for each fire, calculated from pixel number and size |
| Sentinel 2 | Landsat 8 | Difference | |
|---|---|---|---|
| Unburnt | 0.98 | 0.96 | 0.02 |
| Low severity | 0.83 | 0.86 | −0.03 |
| Moderate severity | 0.66 | 0.67 | −0.01 |
| High severity | 0.84 | 0.79 | 0.05 |
| Extreme severity | 0.91 | 0.89 | 0.01 |
| Kappa Score | 0.72 | 0.71 | 0.01 |
| Overall Accuracy | 0.80 | 0.82 | −0.02 |
| Kappa Score | Level of Agreement |
|---|---|
| >0.81 | almost perfect |
| 0.61–0.8 | substantial |
| 0.4–0.6 | moderate |
| 0.21–0.4 | fair |
| 0–0.2 | slight |
| <0 | poor |
| Sentinel 2 | ||||||
|---|---|---|---|---|---|---|
| Landsat 8 | Unburnt | Low | Moderate | High | Extreme | |
| Unburnt | 24,196 | 3082 | 1425 | 76 | 23 | |
| Low | 3166 | 8776 | 9674 | 2574 | 284 | |
| Moderate | 481 | 2131 | 9870 | 9385 | 2658 | |
| High | 871 | 454 | 1491 | 10,346 | 9571 | |
| Extreme | 3 | 44 | 90 | 766 | 10,557 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
White, L.A.; Gibson, R.K. Comparing Fire Extent and Severity Mapping between Sentinel 2 and Landsat 8 Satellite Sensors. Remote Sens. 2022, 14, 1661. https://doi.org/10.3390/rs14071661
White LA, Gibson RK. Comparing Fire Extent and Severity Mapping between Sentinel 2 and Landsat 8 Satellite Sensors. Remote Sensing. 2022; 14(7):1661. https://doi.org/10.3390/rs14071661
Chicago/Turabian StyleWhite, Laura A., and Rebecca K. Gibson. 2022. "Comparing Fire Extent and Severity Mapping between Sentinel 2 and Landsat 8 Satellite Sensors" Remote Sensing 14, no. 7: 1661. https://doi.org/10.3390/rs14071661
APA StyleWhite, L. A., & Gibson, R. K. (2022). Comparing Fire Extent and Severity Mapping between Sentinel 2 and Landsat 8 Satellite Sensors. Remote Sensing, 14(7), 1661. https://doi.org/10.3390/rs14071661