
Adaptive Square-Root Unscented Kalman Filter Phase Unwrapping with Modified Phase Gradient Estimation

 , , ,
, , ,
Abstract
:1. Introduction
2. Phase Unwrapping Theory
2.1. Basic Theory of Phase Unwrapping
2.2. Unscented Kalman Filter Phase Unwrapping
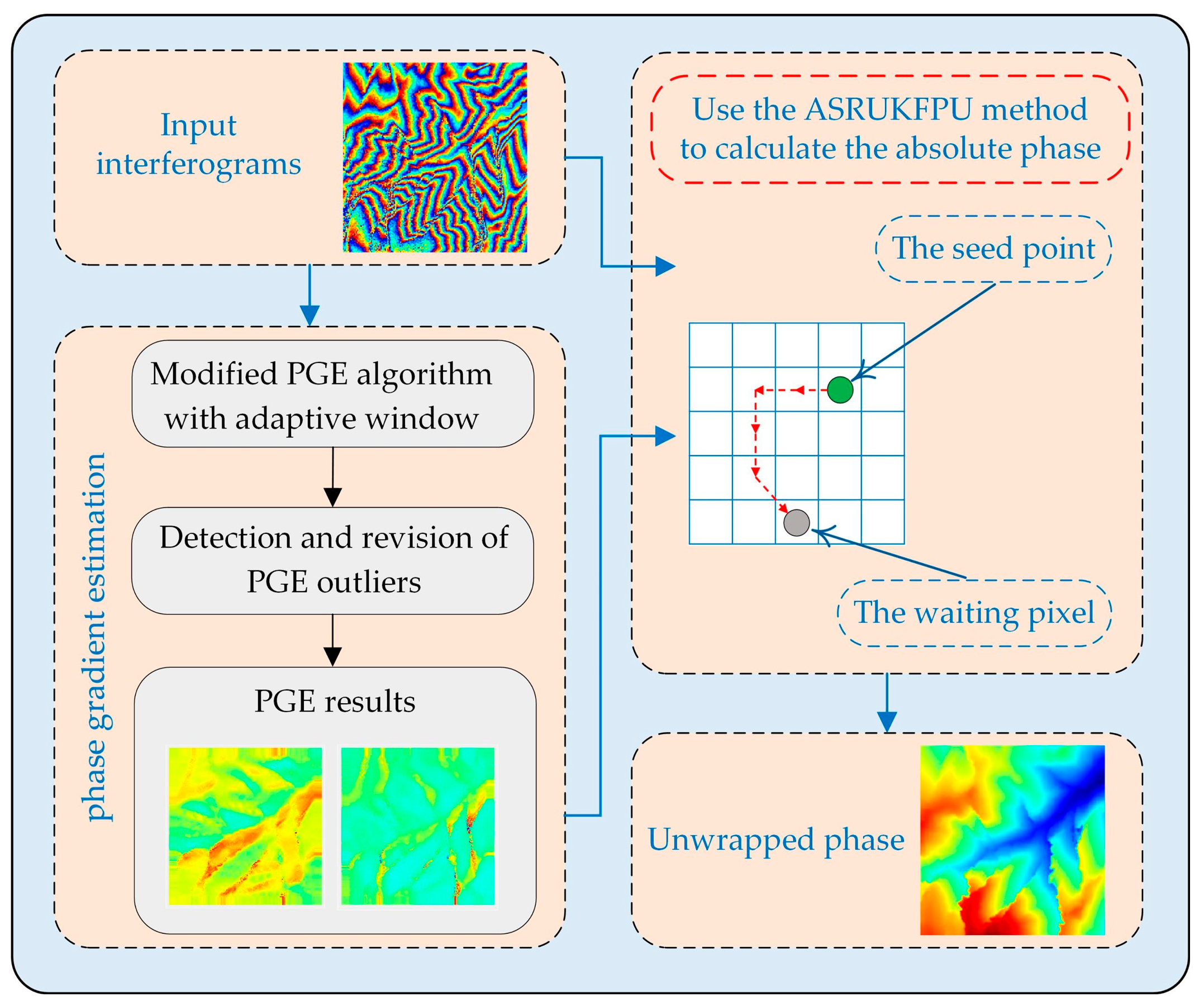
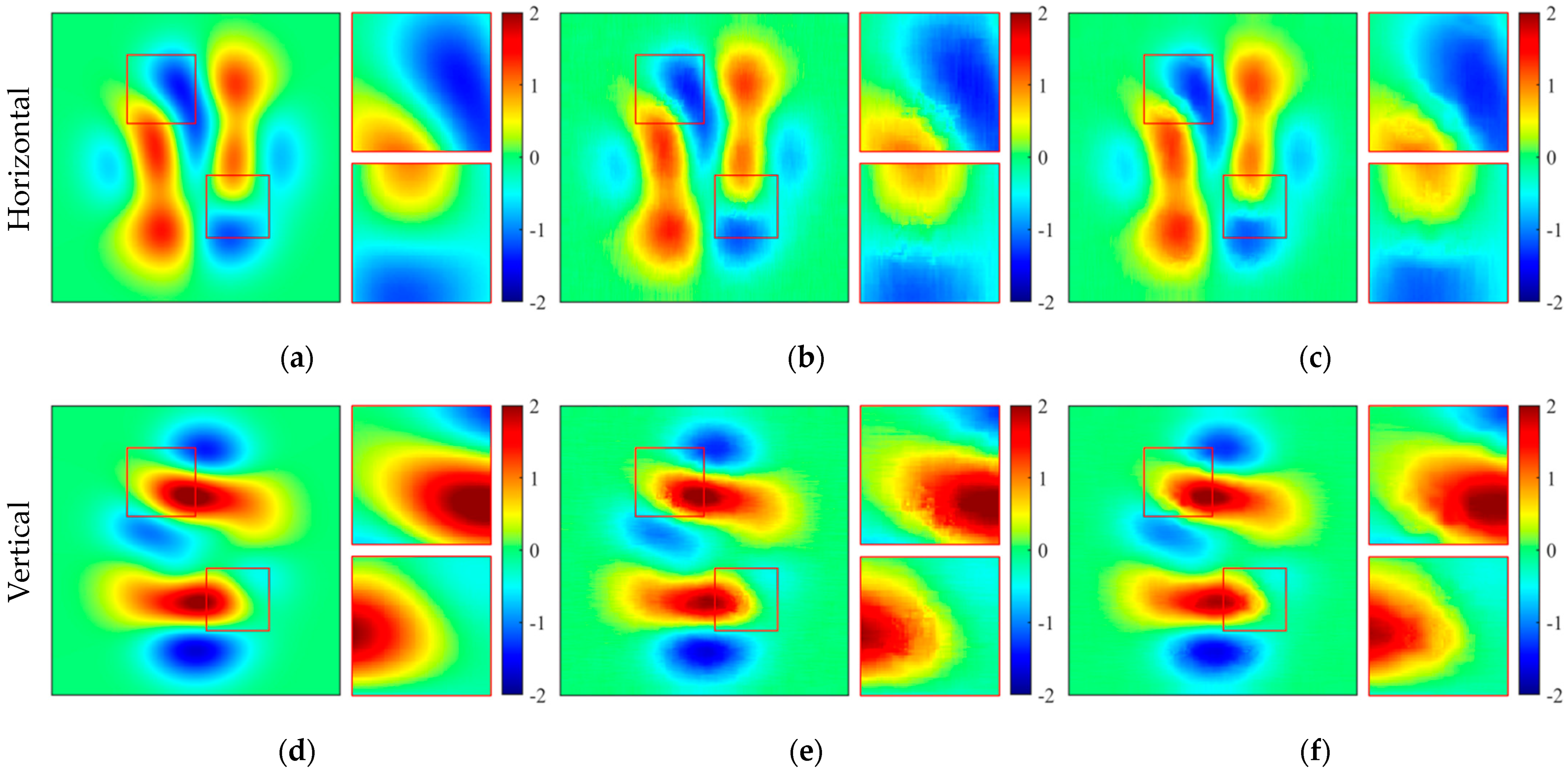
3. Modified Phase Gradient Estimation Algorithm
3.1. Modified PGE Based on Local Frequency Estimation
3.2. Adaptive Window of PGE
3.3. Detection and Revision of PGE Outliers
4. Adaptive Square-Root Unscented Kalman filter PU Method
4.1. Square-Root Unscented Kalman Filter PU Method
4.2. Adaptive Method
5. Experimental Results
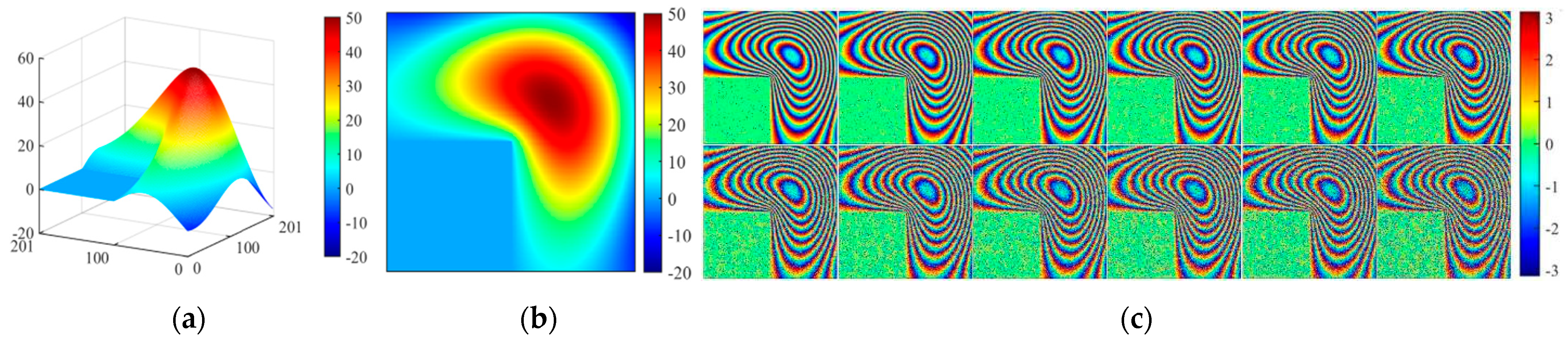
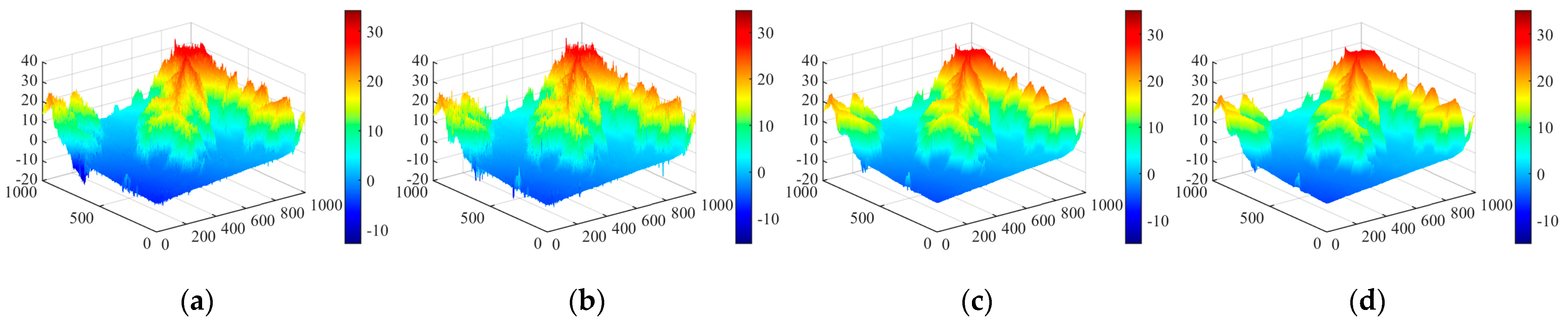
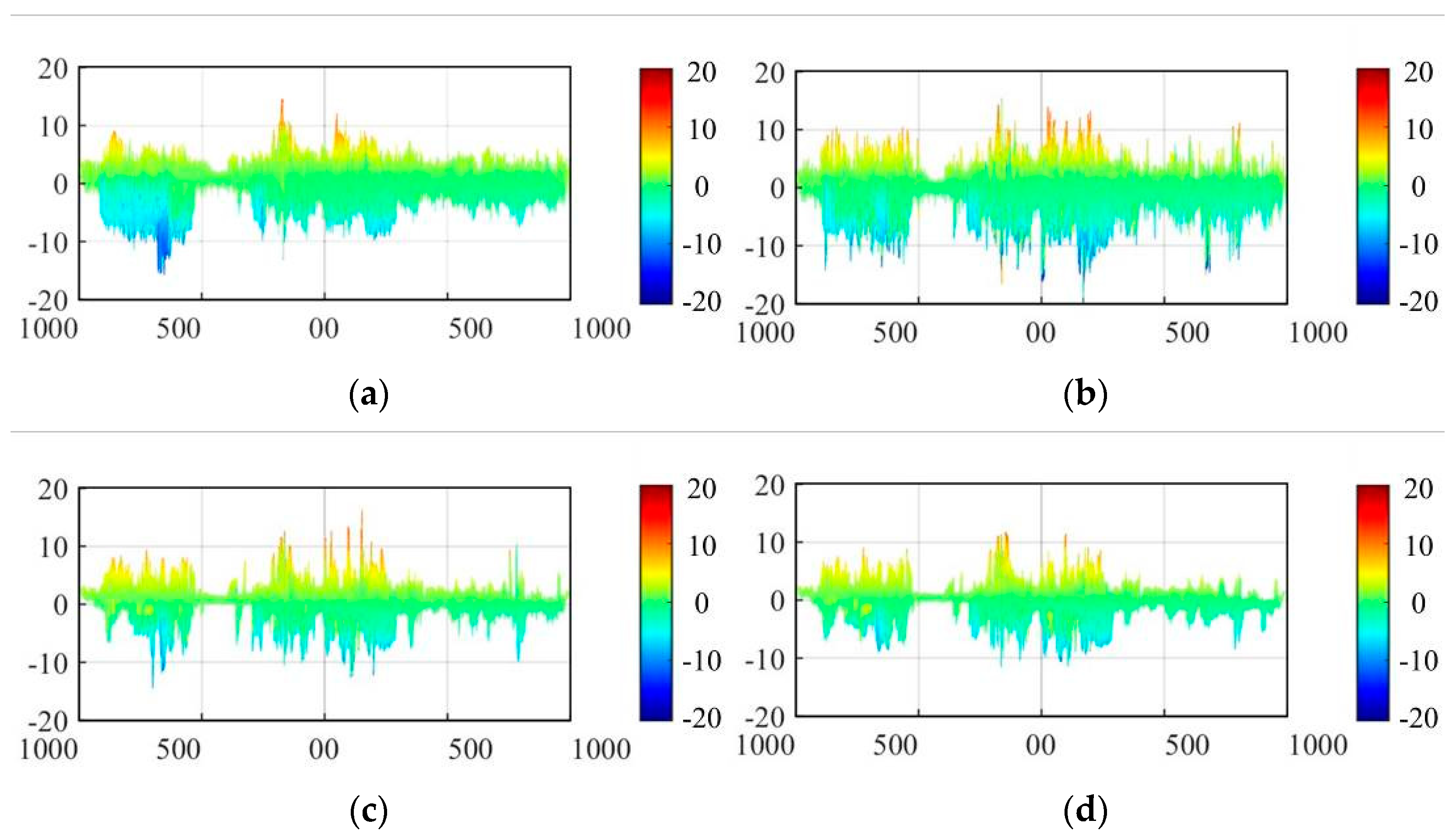
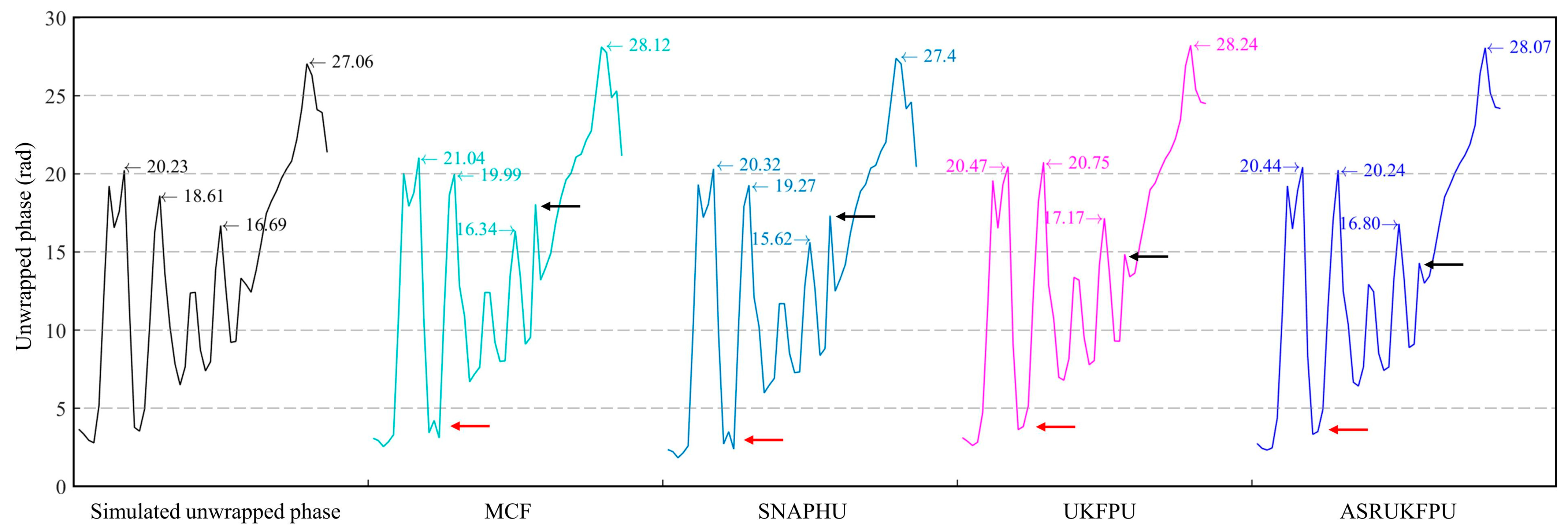
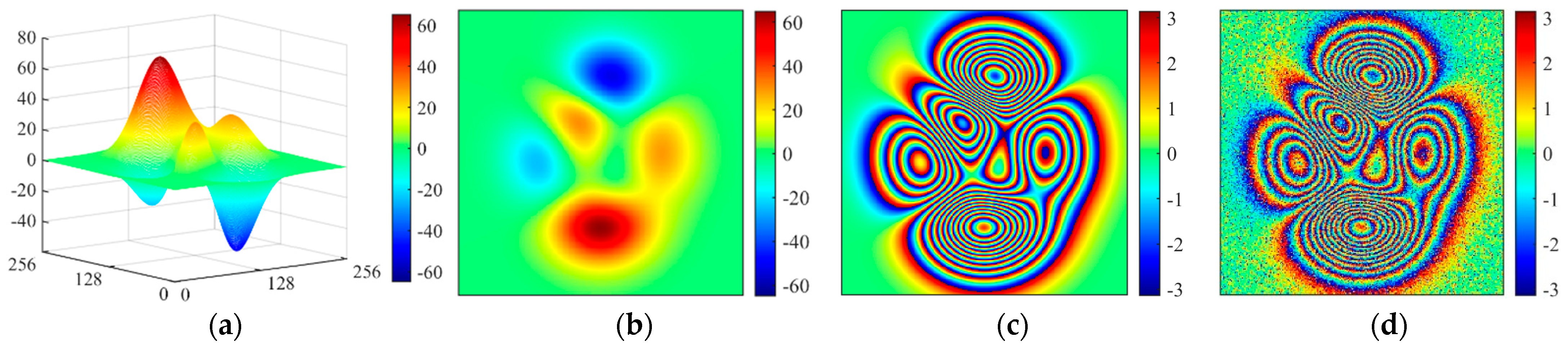
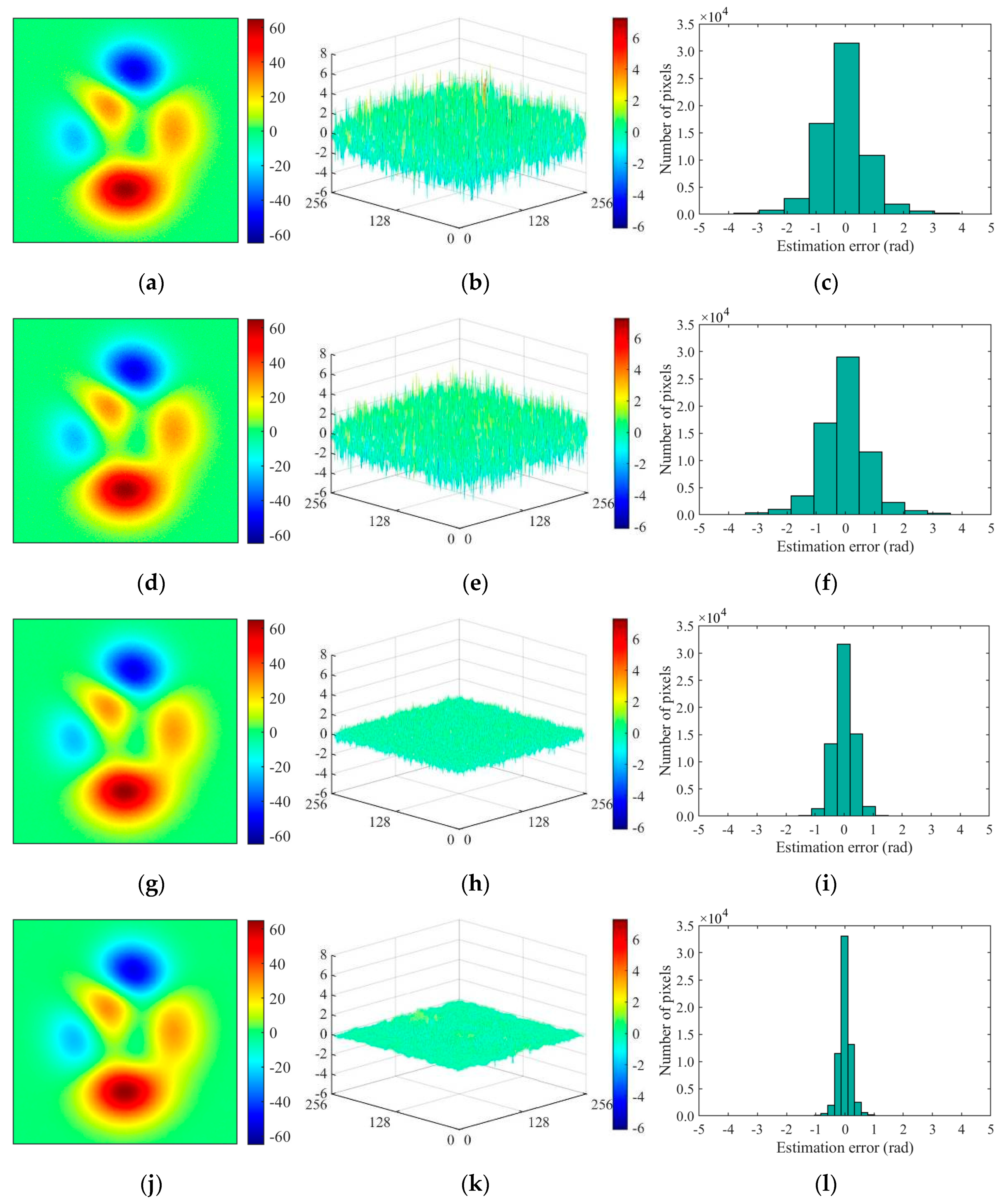
5.1. Simulated Data Results
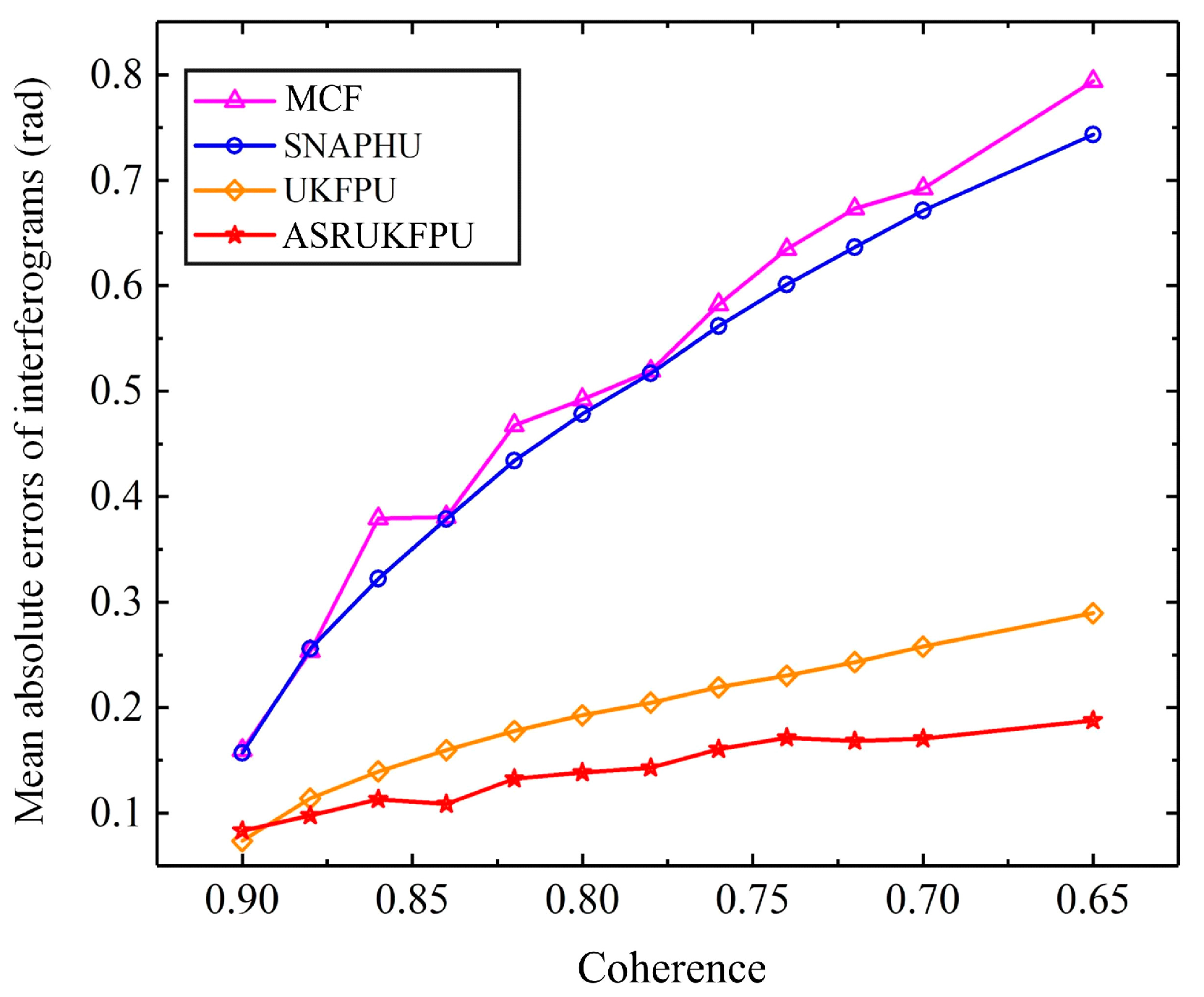
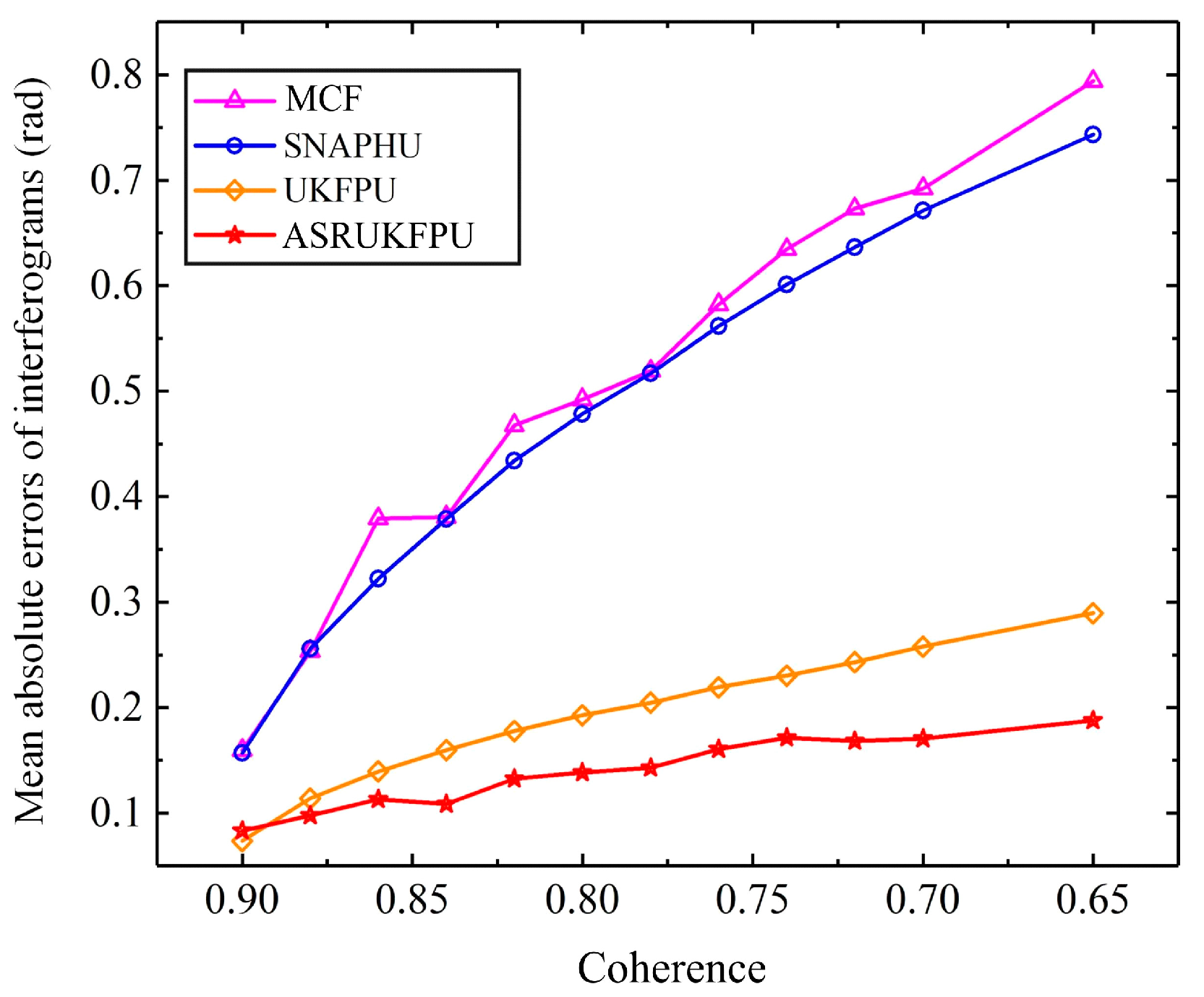
5.2. Robustness Analysis
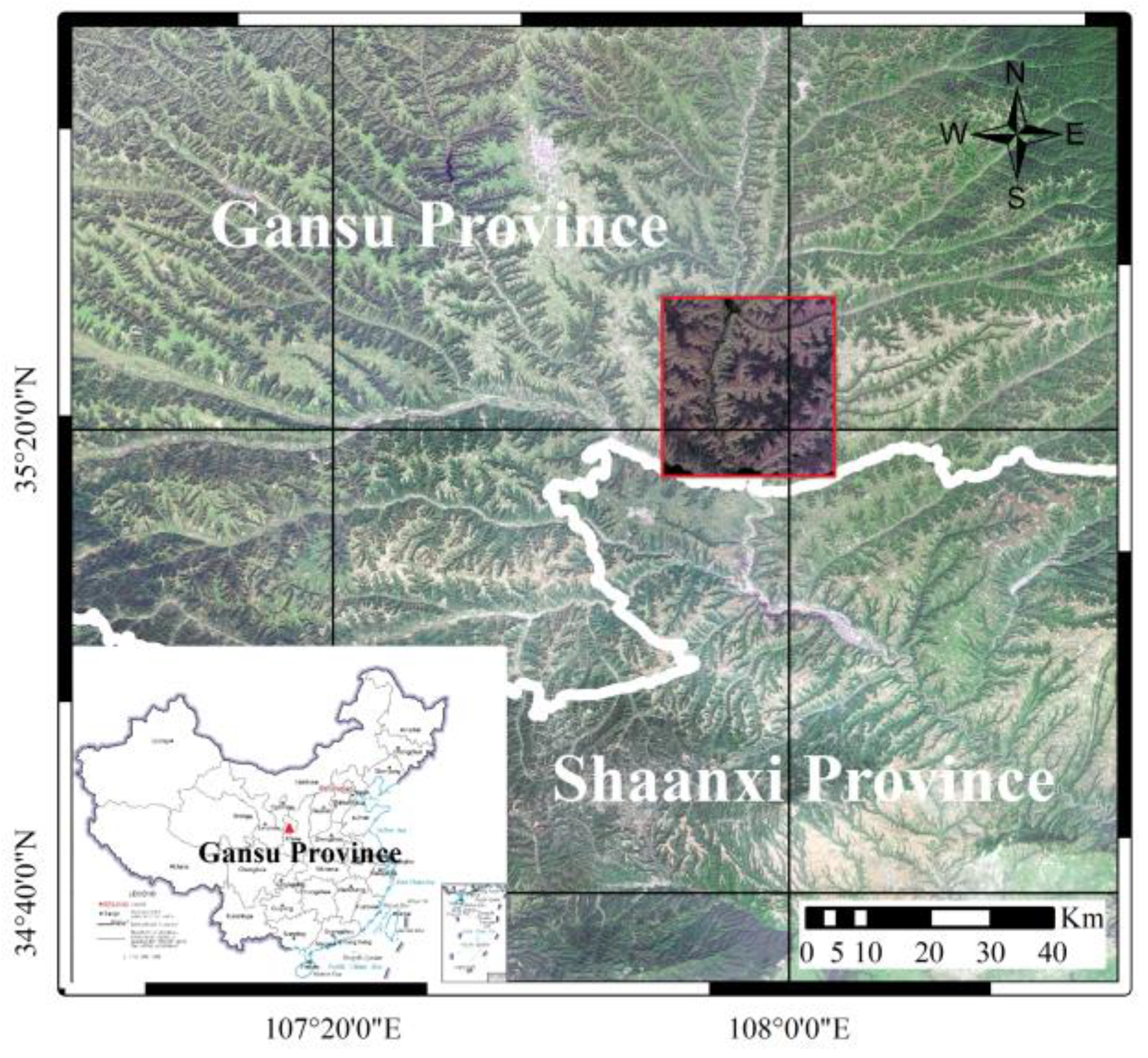
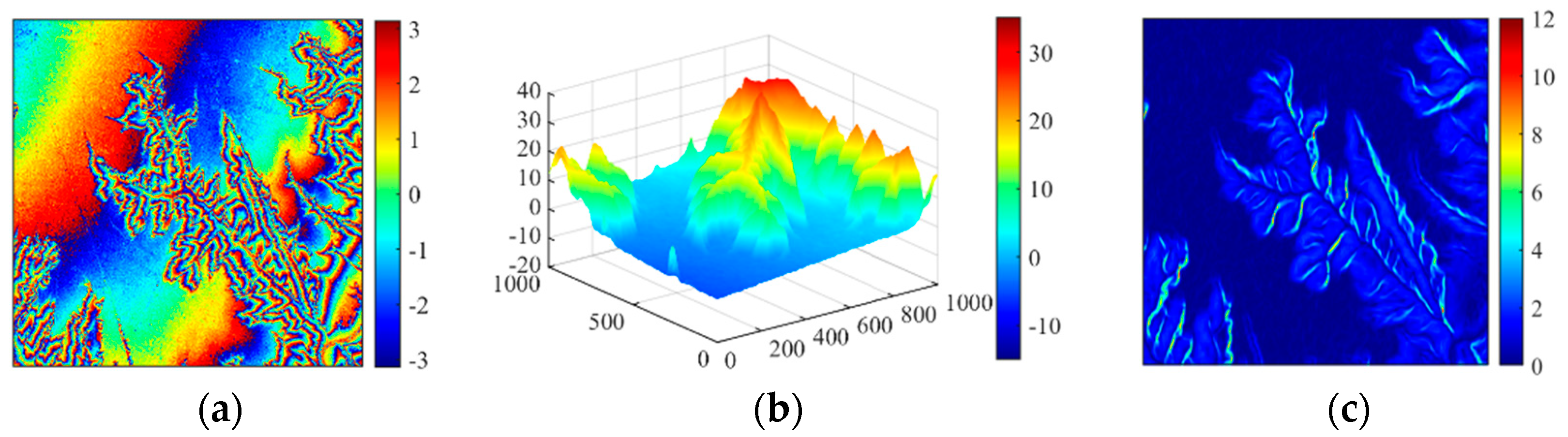
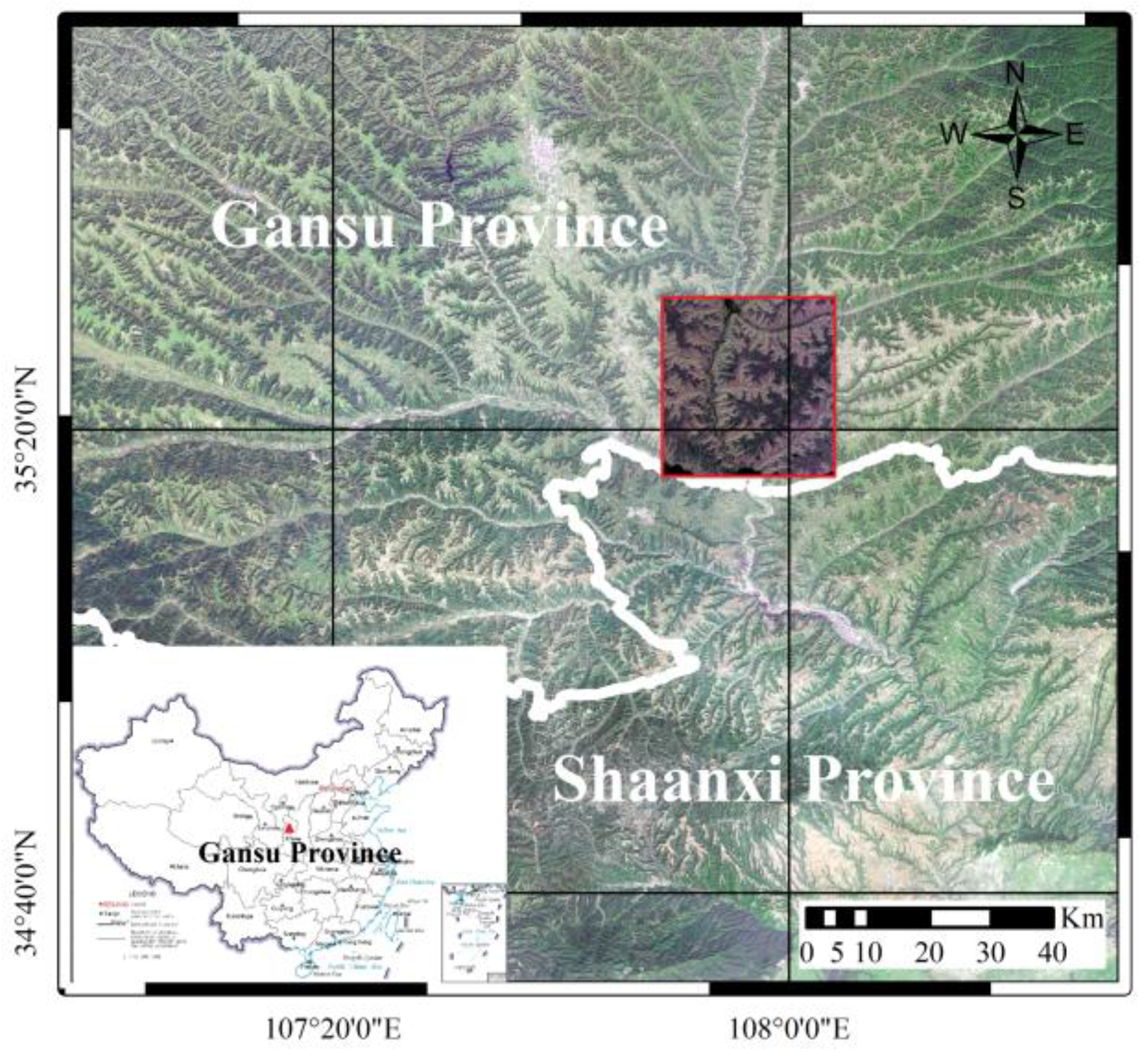
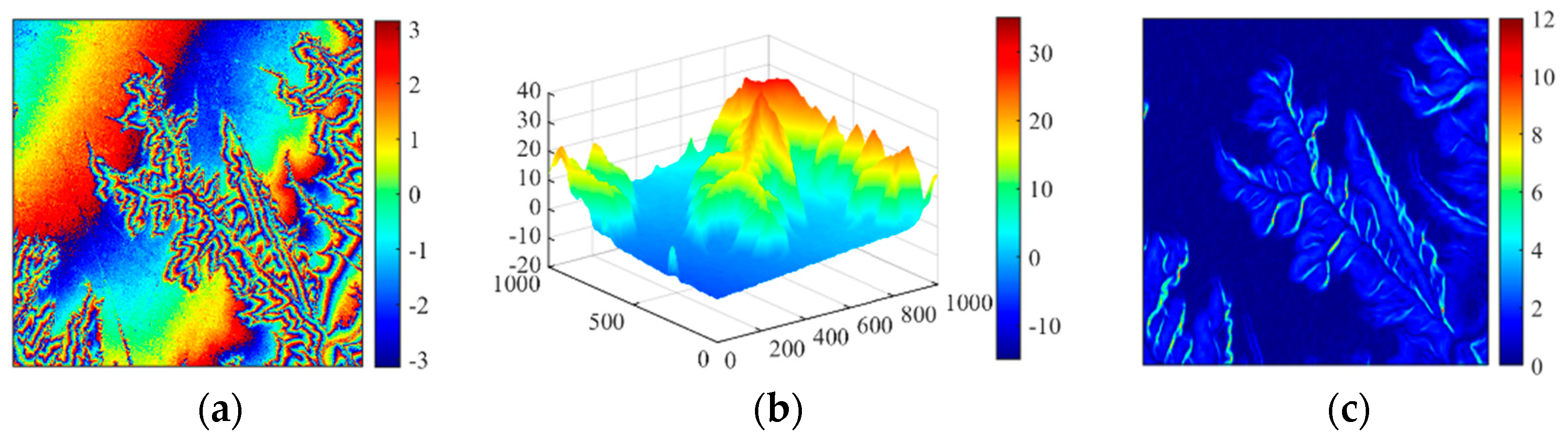
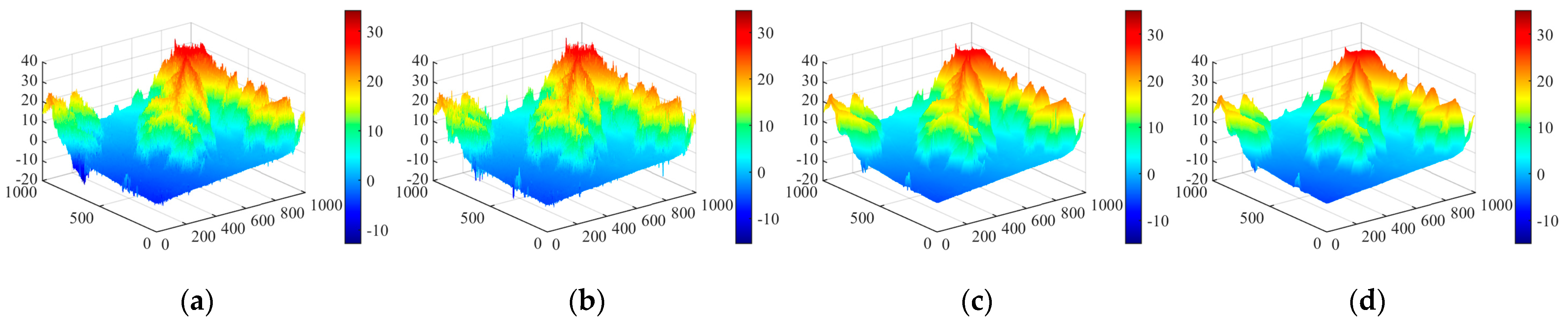
5.3. TerraSAR-X/TanDEM-X Data Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, G.; Zhang, Y.; Zeng, R.; Yang, Z.; Chen, X.; Zhao, F.; Meng, X. Detection of land subsidence associated with land creation and rapid urbanization in the Chinese Loess Plateau using time series InSAR: A case study of Lanzhou new district. Remote Sens. 2018, 10, 270. [Google Scholar] [CrossRef] [Green Version]
- Caló, F.; Notti, D.; Galve, J.P.; Abdikan, S.; Görüm, T.; Pepe, A.; Balik Şanli, F. DInSAR-based detection of land subsidence and correlation with groundwater depletion in Konya Plain, Turkey. Remote Sens. 2017, 9, 83. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Lohman, R.B. Coherence-guided InSAR deformation analysis in the presence of ongoing land surface changes in the Imperial Valley, California. Remote Sens. Environ. 2020, 253, 112–160. [Google Scholar] [CrossRef]
- Rossi, C.; Gernhardt, S. Urban DEM generation, analysis and enhancements using TanDEM-X. ISPRS J. Photogramm. Remote Sens. 2013, 85, 120–131. [Google Scholar] [CrossRef]
- Dong, Y.; Jiang, H.; Zhang, L.; Liao, M. An efficient maximum likelihood estimation approach of multi-baseline SAR interferometry for refined topographic mapping in mountainous areas. Remote Sens. 2018, 10, 454. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Yuan, Z.; Xu, J.; Lee, H. Phase unwrapping in InSAR: A review. IEEE Geosci. Remote Sens. Mag. 2019, 7, 40–58. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Bao, Z. A cluster-analysis-based efficient multibaseline phase-unwrapping algorithm. IEEE Trans. Geosci. Remote Sen. 2011, 49, 478–487. [Google Scholar] [CrossRef]
- Costantini, M. A novel phase unwrapping method based on network programming. IEEE Trans. Geosci. Remote Sens. 1998, 36, 813–821. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Two-dimensional phase unwrapping with use of statistical models for cost functions in nonlinear optimization. J. Opt. Soc. Am. A 2001, 18, 338–351. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghiglia, D.C.; Romero, L.A. Robust two-dimensional weighted and unweighted phase unwrapping that uses fast transforms and iterative methods. J. Opt. Soc. Am. A 1994, 11, 107–117. [Google Scholar] [CrossRef]
- Ghiglia, D.C.; Romero, L.A. Minimum Lp-norm two-dimensional phase unwrapping. J. Opt. Soc. Am. A 1996, 13, 1999–2013. [Google Scholar] [CrossRef]
- Zheng, D.; Da, F. A novel algorithm for branch cut phase unwrapping. Opt. Lasers Eng. 2011, 49, 609–617. [Google Scholar] [CrossRef]
- Xu, W.; Cumming, I. A region-growing algorithm for InSAR phase unwrapping. IEEE Trans. Geosci. Remote Sens. 1999, 37, 124–134. [Google Scholar] [CrossRef] [Green Version]
- Flynn, T.J. Two-dimensional phase unwrapping with minimum weighted discontinuity. J. Opt. Soc. Am. A 1997, 14, 2692–2701. [Google Scholar] [CrossRef]
- Zhong, H.; Tang, J.; Zhang, S.; Chen, M. An improved quality-guided phase-unwrapping algorithm based on priority queue. IEEE Geosci. Remote Sens. Lett. 2011, 8, 364–368. [Google Scholar] [CrossRef]
- Libert, L.; Derauw, D.; D’Oreye, N.; Barbier, C.; Orban, A. Split-Band Interferometry-Assisted Phase Unwrapping for the Phase Ambiguities Correction. Remote Sens. 2017, 9, 879. [Google Scholar] [CrossRef] [Green Version]
- Mao, W.; Wang, S.; Xu, B.; Li, Z.; Zhu, Y. An Improved Phase Unwrapping Method Based on Hierarchical Networking and Constrained Adjustment. Remote Sens. 2021, 13, 4193. [Google Scholar] [CrossRef]
- Karout, S.; Gdeisat, M.; Burton, D.; Lalor, M. Two-dimensional phase unwrapping using a hybrid genetic algorithm. Appl. Opt. 2007, 46, 730–743. [Google Scholar] [CrossRef]
- Wei, Z.Q.; Xu, F.; Jin, Y.Q. Phase unwrapping for SAR interferometry based on an ant colony optimization algorithm. Int. J. Remote Sens. 2007, 29, 711–725. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Lee, H.; Cao, N. 2-D Phase Unwrapping Using Minimum Infinity-Norm. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1887–1891. [Google Scholar] [CrossRef]
- Tlili, A.; Cavayas, F.; Foucher, S.; Siles, G.L. New interferometric phase unwrapping method based on energy minimization from contextual modeling. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 6524–6532. [Google Scholar] [CrossRef]
- Gao, Y.; Tang, X.; Li, T.; Lu, J.; Li, S.; Chen, Q.; Zhang, X. A phase slicing 2-D phase unwrapping method using the L1-Norm. IEEE Geosci. Remote Sens. Lett. 2020, in press. [Google Scholar] [CrossRef]
- Xie, X.; Pi, Y. Phase noise filtering and phase unwrapping method based on unscented Kalman filter. J. Syst. Eng. Electron. 2011, 22, 365–372. [Google Scholar] [CrossRef]
- Xie, X.; Li, Y. Enhanced phase unwrapping algorithm based on unscented kalman filter, enhanced phase gradient estimator, and path-following strategy. Appl. Opt. 2014, 53, 4049–4060. [Google Scholar] [CrossRef]
- Xie, X.; Dai, G. Unscented information filtering phase unwrapping algorithm for interferometric fringe patterns. Appl. Opt. 2017, 56, 9423–9434. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, S.; Li, T.; Chen, Q.; Li, S.; Meng, P. Adaptive Unscented Kalman Filter Phase Unwrapping Method and Its Application on Gaofen-3 Interferometric SAR Data. Sensors 2018, 18, 1793. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Bian, Z.; Liu, Z.; Zhang, Q. Evaluation of a Cubature Kalman Filtering-Based Phase Unwrapping Method for Differential Interferograms with High Noise in Coal Mining Areas. Sensors 2015, 15, 16336–16357. [Google Scholar] [CrossRef] [Green Version]
- Spagnolini, U. 2-D phase unwrapping and instantaneous frequency estimation. IEEE Trans. Geosci. Remote Sens. 1995, 33, 579–589. [Google Scholar] [CrossRef] [Green Version]
- Suo, Z.; Li, Z.; Bao, Z. A New Strategy to Estimate Local Fringe Frequencies for InSAR Phase Noise Reduction. IEEE Geosci. Remote Sens. Lett. 2010, 7, 771–775. [Google Scholar] [CrossRef]
- Wu, N.; Feng, D.; Li, J. A locally adaptive filter of interferometric phase images. IEEE Geosci. Remote Sens. Lett. 2006, 3, 73–77. [Google Scholar] [CrossRef]
- Trouve, E.; Caramma, M.; Maitre, H. Fringe detection in noisy complex interferograms. Appl. Opt. 1996, 35, 3799–3806. [Google Scholar] [CrossRef] [PubMed]
- Cai, B.; Liang, D.; Dong, Z. A new adaptive multiresolution noise-filtering approach for SAR interferometric phase images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 266–270. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, Z.; Lin, S.; Liu, T.; Zhang, Q.; Long, T. Local Fringe Frequency Estimation Based on Multifrequency InSAR for Phase-Noise Reduction in Highly Sloped Terrain. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1527–1531. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, S.; Zhang, K.; Li, S. Frequency domain filtering SAR interferometric phase noise using the amended matrix pencil model. Comp. Model. Eng. Sci. 2019, 119, 349–363. [Google Scholar] [CrossRef] [Green Version]
- Lee, D. Nonlinear Estimation and Multiple Sensor Fusion Using Unscented Information Filtering. IEEE Signal Process. Lett. 2008, 15, 861–864. [Google Scholar] [CrossRef]
- Wang, G.; Wang, K. Study and design of exponential and Butterworth low-pass filters used for digital speckle interference fringe filtering. Optik 2013, 124, 6713–6717. [Google Scholar] [CrossRef]
- Holmes, S.A.; Klein, G.; Murray, D.W. An O(N²) Square Root Unscented Kalman Filter for Visual Simultaneous Localization and Mapping. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 1251–1263. [Google Scholar] [CrossRef]
- Menegaz, H.; Ishihara, J.Y.; Borges, G.; Vargas, A. A systematization of the unscented kalman filter theory. IEEE Trans. Autom. Control 2015, 60, 2583–2598. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.X.; Ren, X.; Xu, Y. Main progress of adaptively robust filter with applications in navigation. J. Navig. Position. 2013, 1, 9–15. [Google Scholar]
- Yang, Y.; Xu, T. An adaptive kalman filter based on sage windowing weights and variance components. J. Nav. 2003, 56, 231–240. [Google Scholar] [CrossRef]
- Wei, W.; Gao, S.; Zhong, Y.; Gu, C.; Hu, G. Adaptive square-root unscented particle filtering algorithm for dynamic navigation. Sensors 2018, 18, 2337. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Y.; Tang, X.; Li, T.; Chen, Q.; Zhang, X.; Li, S. Bayesian filtering multi-baseline phase unwrapping method based on a two-stage programming approach. Appl. Sci. 2020, 10, 3139. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Time (s) | Error Range (rad) | MAE (rad) |
|---|---|---|---|
| MCF | 8.37 | [−6.1326, 7.2449] | 0.5995 |
| SNAPHU | - | [−4.0745, 4.3385] | 0.5941 |
| UKFPU | 1.07 | [−1.7752, 1.9319] | 0.2674 |
| ASRUKFPU | 3.03 | [−2.0349, 1.3972] | 0.1502 |
| Methods | Residuals | Error range (rad) | MAE (rad) |
|---|---|---|---|
| MCF | 20,255 | [−15.7956, 14.6263] | 0.8411 |
| SNAPHU | 20,255 | [−20.3866, 15.5055] | 0.7822 |
| UKFPU | 2624 | [−14.4530, 16.3758] | 0.6981 |
| ASRUKFPU | 2253 | [−11.5615, 11.7899] | 0.5948 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhang, S.; Gao, Y.; Li, S.; Jia, Y.; Li, M. Adaptive Square-Root Unscented Kalman Filter Phase Unwrapping with Modified Phase Gradient Estimation. Remote Sens. 2022, 14, 1229. https://doi.org/10.3390/rs14051229
Zhang Y, Zhang S, Gao Y, Li S, Jia Y, Li M. Adaptive Square-Root Unscented Kalman Filter Phase Unwrapping with Modified Phase Gradient Estimation. Remote Sensing. 2022; 14(5):1229. https://doi.org/10.3390/rs14051229
Chicago/Turabian StyleZhang, Yansuo, Shubi Zhang, Yandong Gao, Shijin Li, Yikun Jia, and Minggeng Li. 2022. "Adaptive Square-Root Unscented Kalman Filter Phase Unwrapping with Modified Phase Gradient Estimation" Remote Sensing 14, no. 5: 1229. https://doi.org/10.3390/rs14051229
APA StyleZhang, Y., Zhang, S., Gao, Y., Li, S., Jia, Y., & Li, M. (2022). Adaptive Square-Root Unscented Kalman Filter Phase Unwrapping with Modified Phase Gradient Estimation. Remote Sensing, 14(5), 1229. https://doi.org/10.3390/rs14051229