
BM3D Denoising for a Cluster-Analysis-Based Multibaseline InSAR Phase-Unwrapping Method


Abstract
:1. Introduction
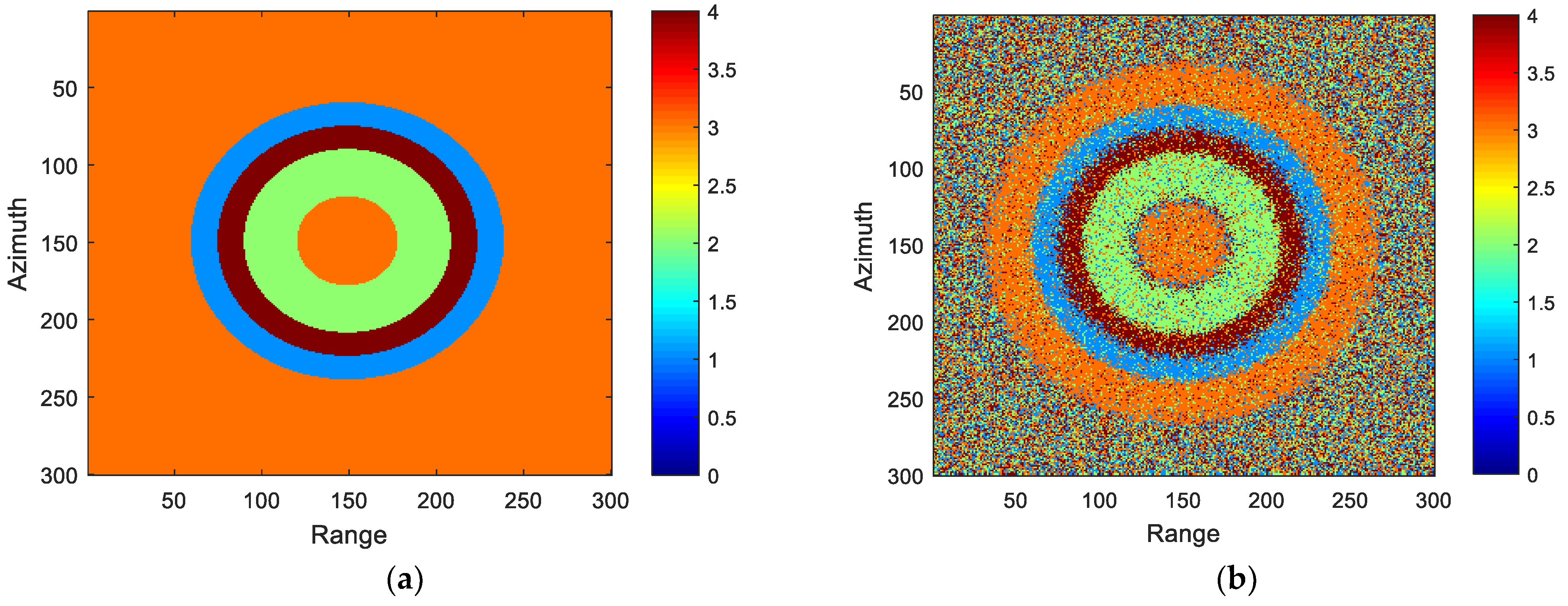
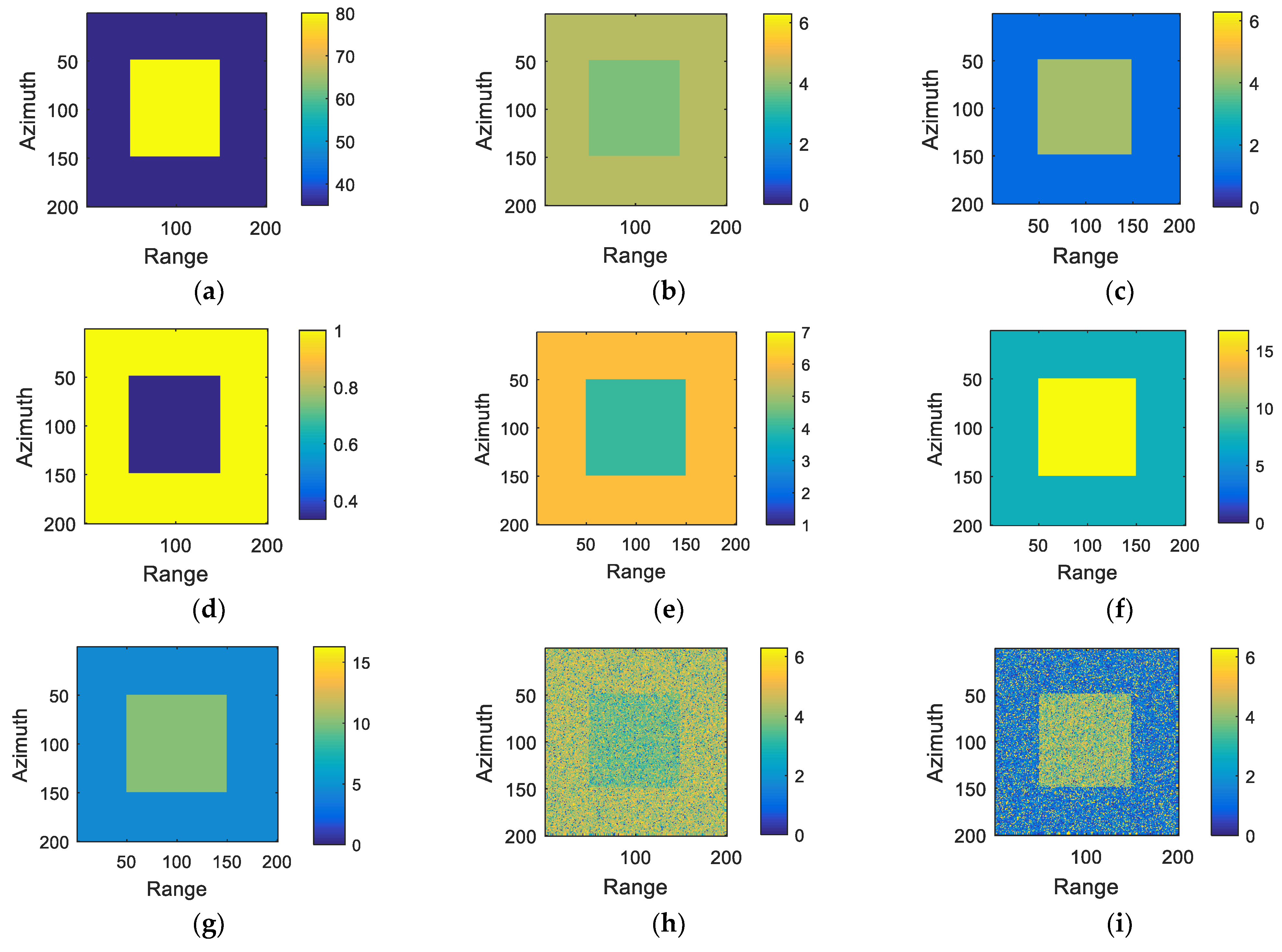
2. Basic Principle of the CA-Based MBPU Method
3. BM3D Algorithm and Similarity Measures Improvement
3.1. BM3D Algorithm
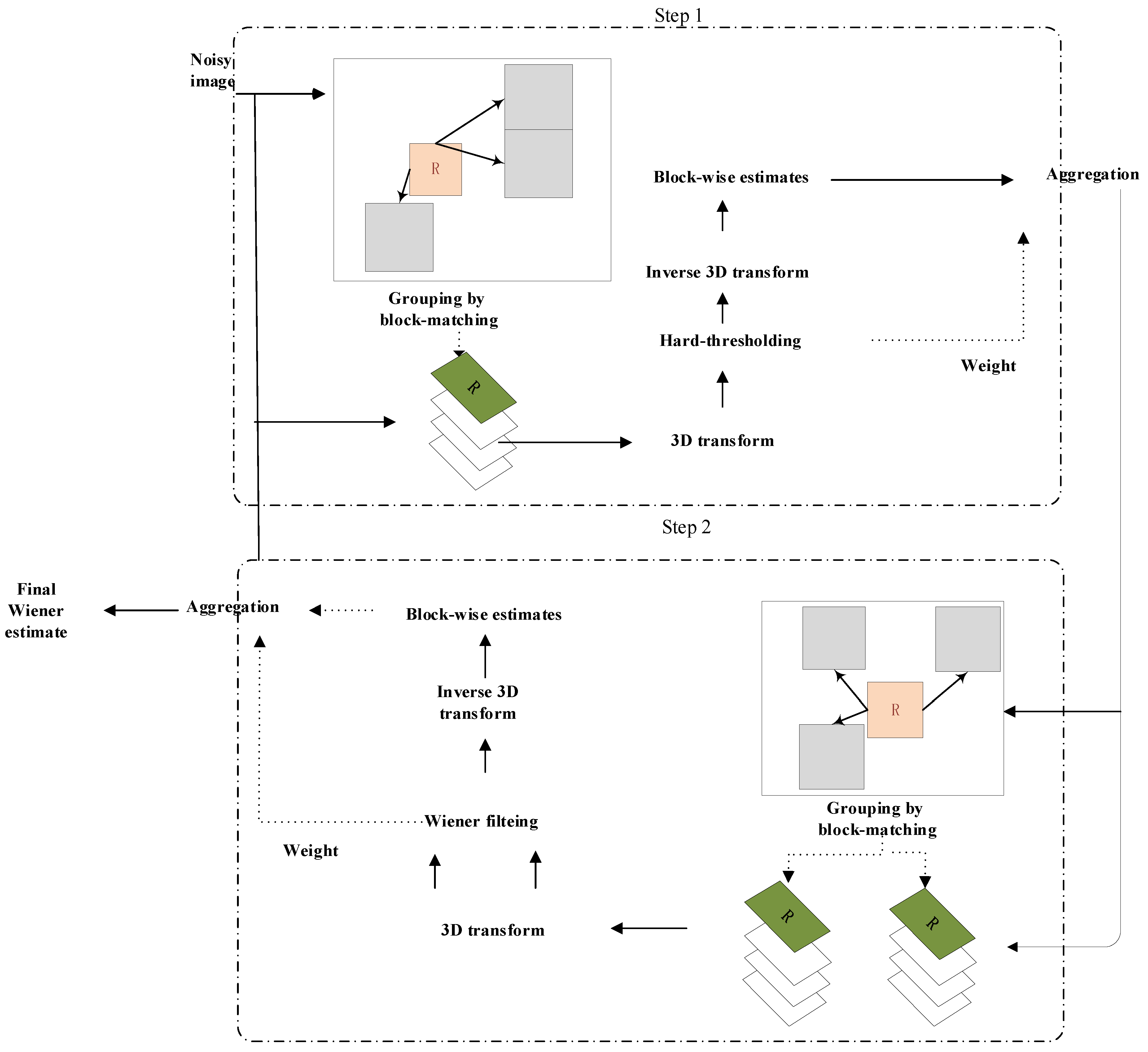
3.1.1. The First Stage, Basic Estimate
- (1)
- Block-matching grouping: Find blocks that are similar to the reference block and named as similar blocks, and the similarity is determined by calculating the predefined distance between the reference block and the block to be matched. Then, the similar blocks are stacked into a 3D array according to the similarity, which is called a 3D group.
- (2)
- Collaborative hard thresholding: Perform 3D transformation processing on the 3D groups, attenuate noise through hard thresholding, and then use 3D inverse transformation to obtain the estimated values of the 2D similar blocks.
- (3)
- Aggregation: Since there are often overlapping parts between the blocks, the result is the same pixel often being contained in several different blocks. Therefore, the pixel value of each pixel is repeatedly estimated, and a weighted average of these multiple estimates is needed to obtain the basic estimate for each block.
3.1.2. The Second Stage, Final Estimate (the Basic Estimate Is Used as the Input)
- (1)
- Block-matching grouping: Find the position of similar blocks by means of block-matching in basic estimation. Block-matching grouping consists of two parts, which can obtain two 3D groups, one from the noise image and the other from the basic estimated image.
- (2)
- Collaborative Wiener filtering: Apply 3D transformation to the above two 3D groups, use the 3D group in the basic estimation as the energy spectrum of the real signal, use the energy spectrum to perform collaborative Wiener filtering on the noise image, and finally, the processed data are inversely transformed and returned to the original position of the similar block to obtain the final estimated value.
- (3)
- Aggregation: Because the blocks obtained after grouping and filtering may overlap each other, weighted average processing on pixels with multiple estimated values is performed to obtain the final estimation.
3.2. Similarity Measures Improvement
4. BM3D Denoising for the CA-Based MBPU Method
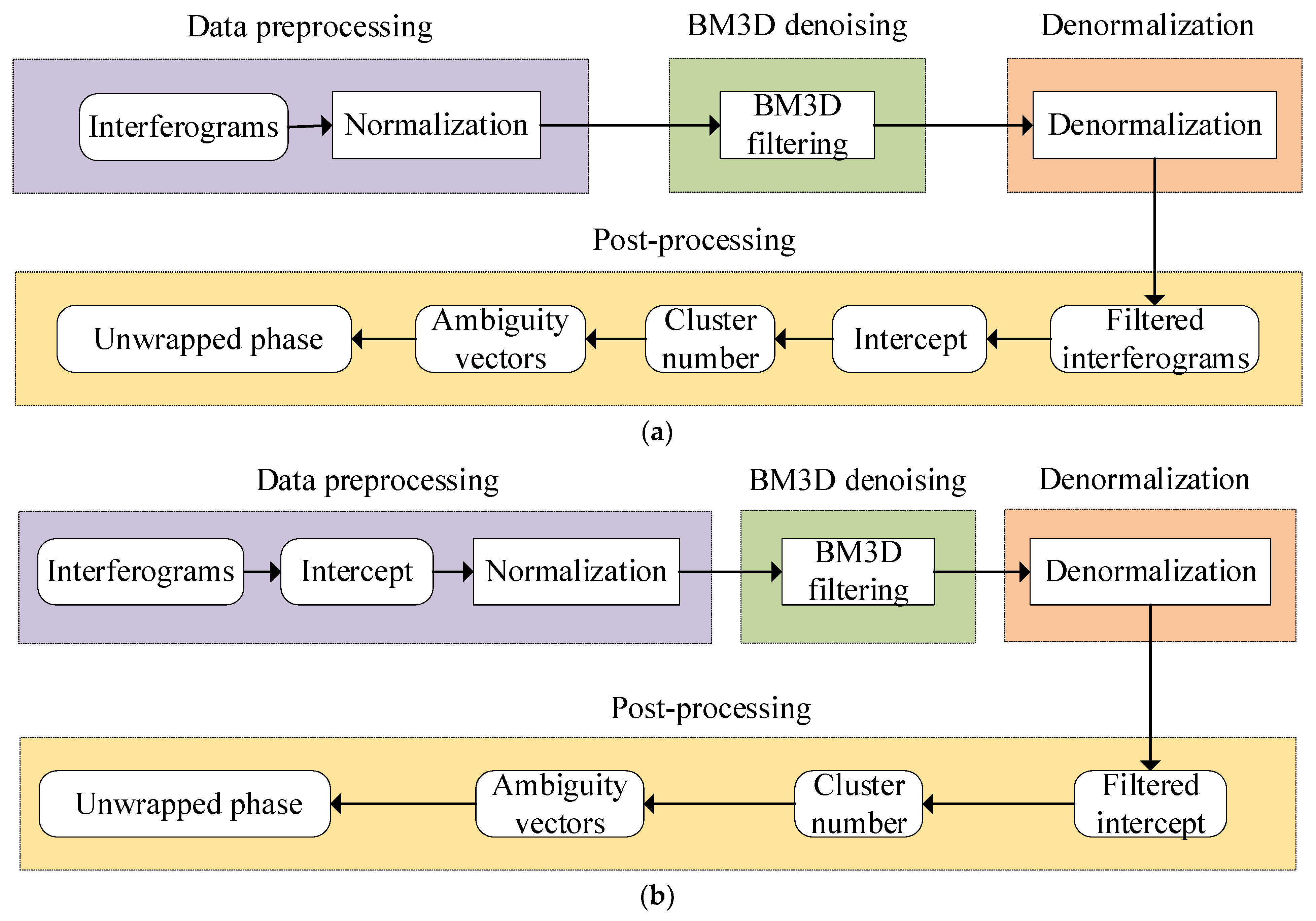
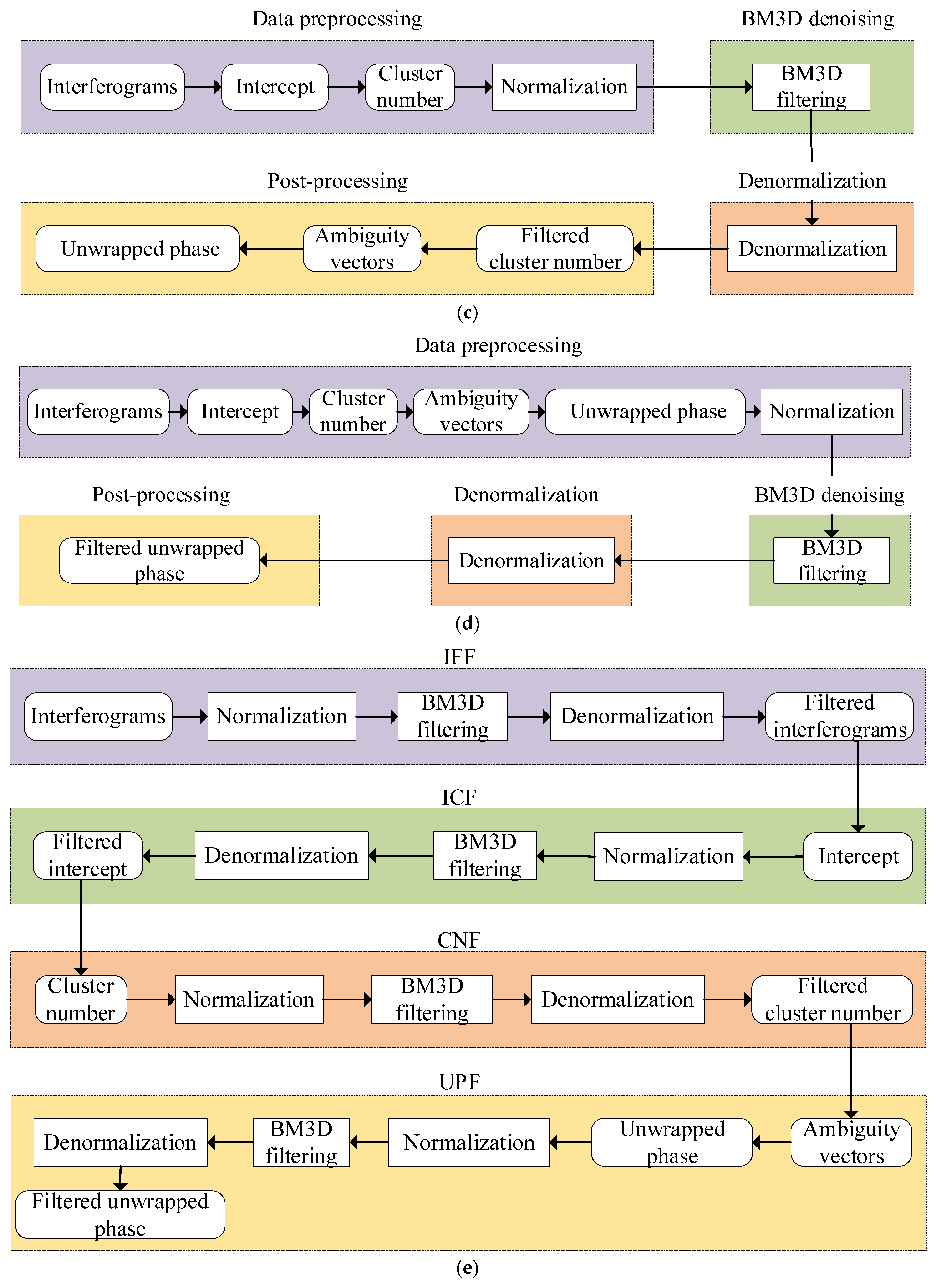
4.1. Data Preprocessing
4.2. BM3D Denoising
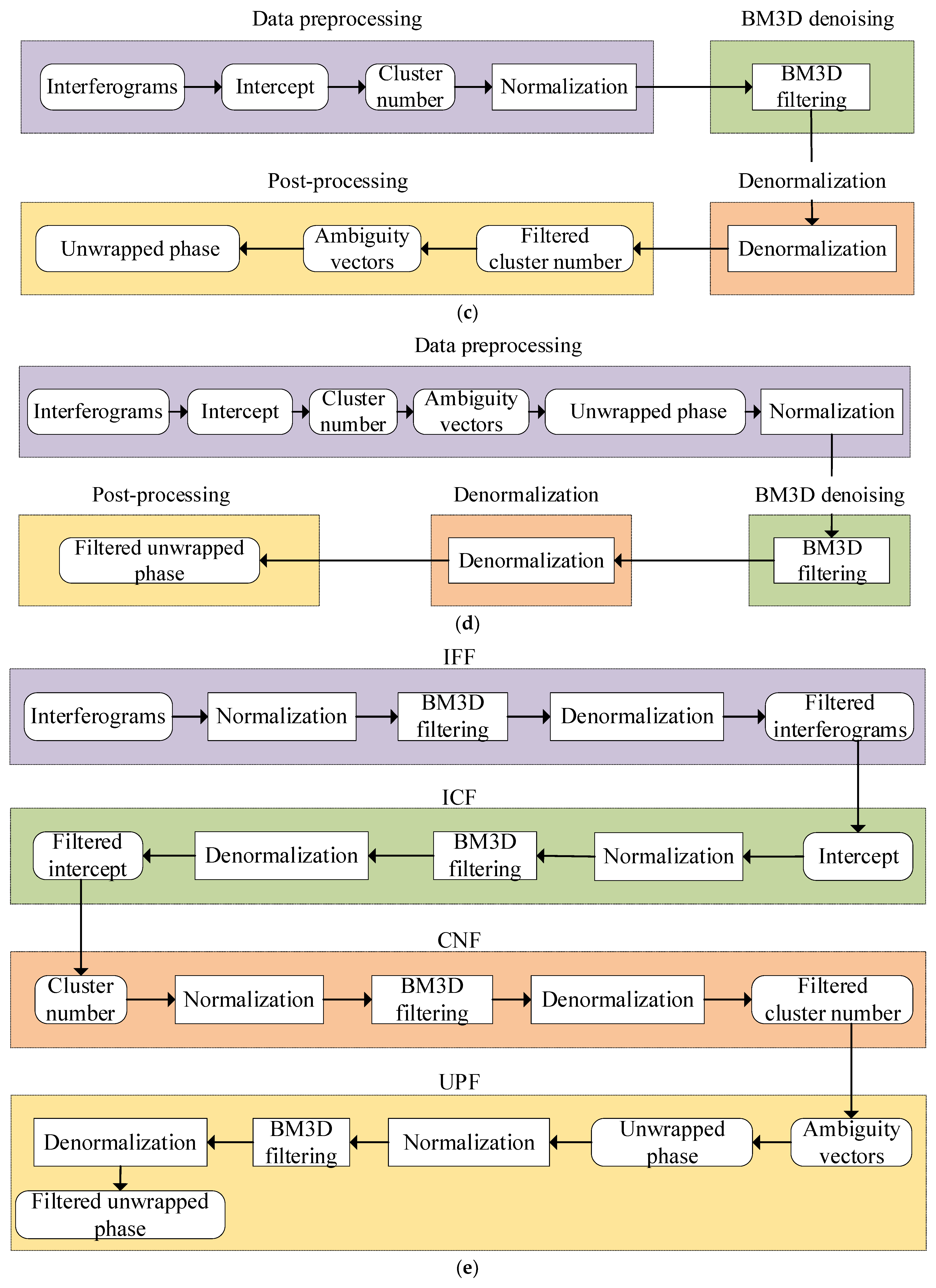
4.2.1. Interferogram Filtering (IFF)
4.2.2. Intercept Filtering (ICF)
4.2.3. Cluster Number Filtering (CNF)
4.2.4. Unwrapped Phase Filtering (UPF)
4.2.5. Simultaneous Filtering (STF)
4.3. Denormalization
4.4. Post-Processing
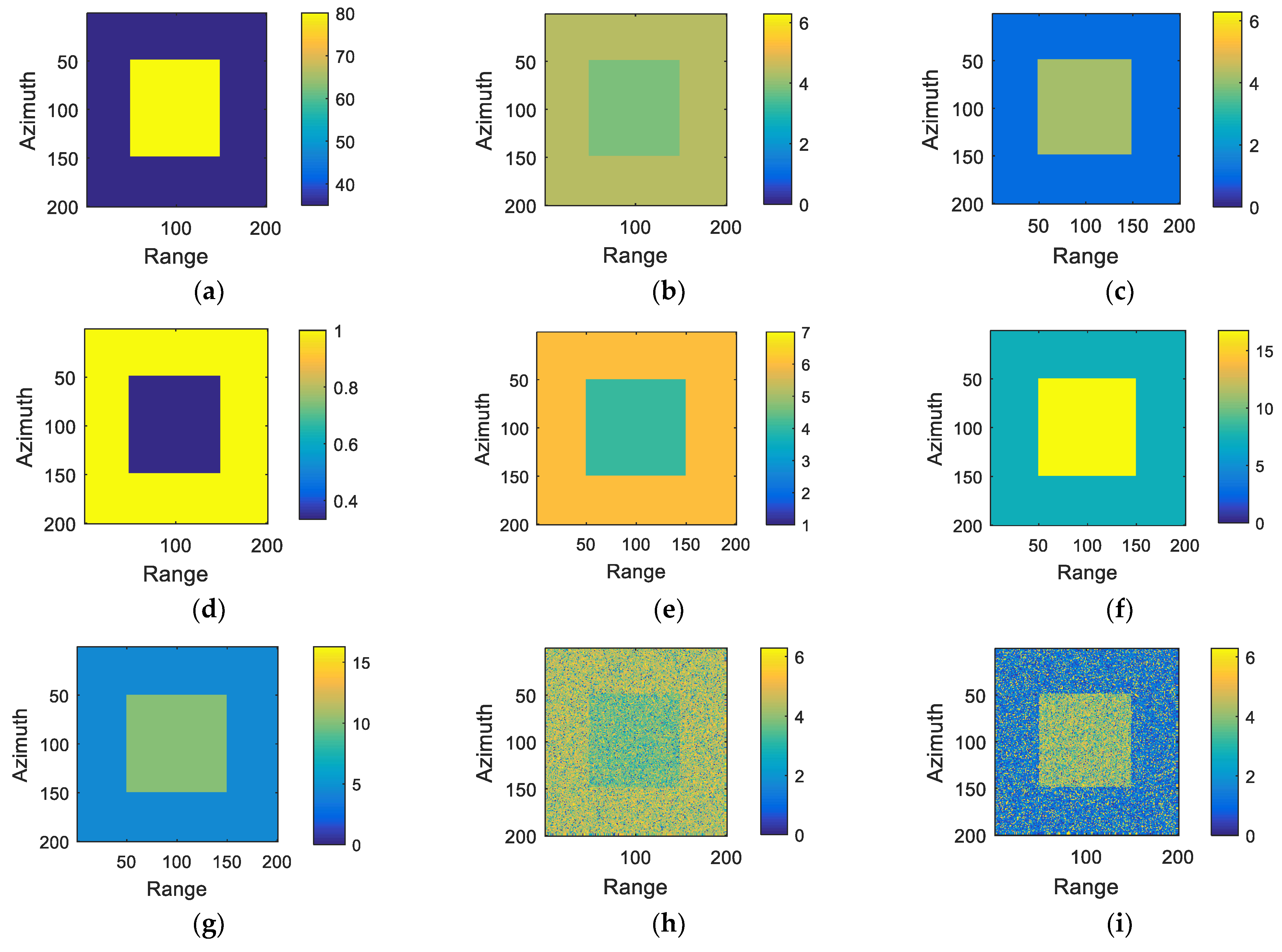
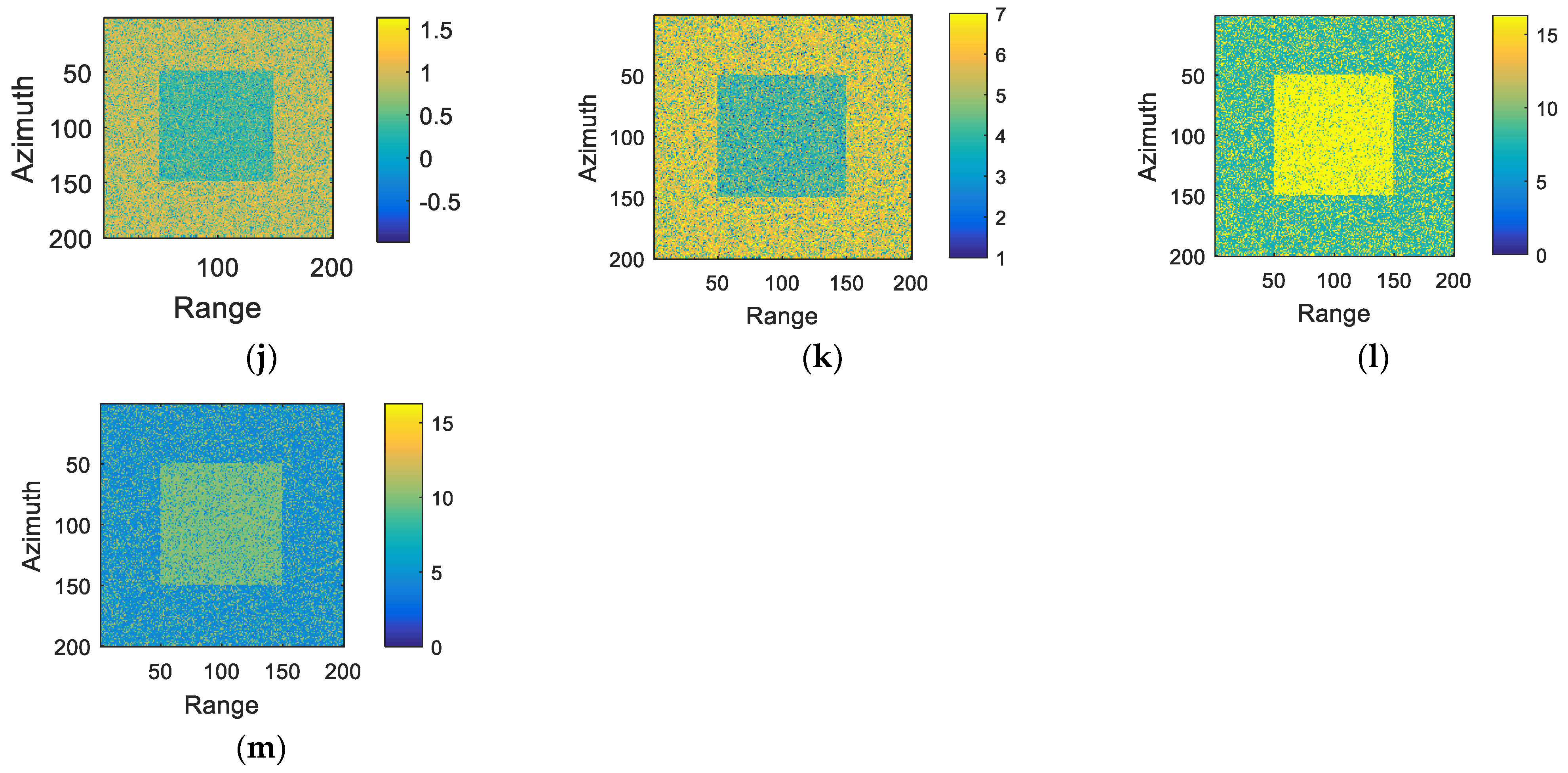
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1–R54. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR inter-ferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, V.; Kumar, A.; Gee, D.; Grebby, S.; Gomes, R.L.; Marsh, S. Comparative Study of Groundwater-Induced Subsidence for London and Delhi Using PSInSAR. Remote Sens. 2021, 13, 4741. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Yuan, Z.; Xu, J.; Lee, H. Phase Unwrapping in InSAR: A Review. IEEE Geosci. Remote Sens. Mag. 2019, 7, 40–58. [Google Scholar] [CrossRef]
- Ghiglia, D.C.; Pritt, M.D. Two-Dimensional Phase Unwrapping: Theory, Algorithms, and Software; Wiley Interscience: New York, NY, USA, 1998. [Google Scholar]
- Yu, H.; Xing, M.; Bao, Z. A Fast Phase Unwrapping Method for Large-Scale Interferograms. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4240–4248. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Xu, J.; An, D.; Lee, H. Large-scale L0-norm and L1-norm 2-D phase unwrapping. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4712–4728. [Google Scholar] [CrossRef]
- Pascazio, V.; Schirinzi, G. Estimation of terrain elevation by multifrequency interferometric wide band SAR data. IEEE Signal Process. Lett. 2001, 8, 7–9. [Google Scholar] [CrossRef]
- Pascazio, V.; Schirinzi, G. Multifrequency InSAR height reconstruction through maximum likelihood estimation of local planes parameters. IEEE Trans. Image Process. 2002, 11, 1478–1489. [Google Scholar] [CrossRef]
- Ferraiuolo, G.; Pascazio, V.; Schirinzi, G. Maximum A Posteriori Estimation of Height Profiles in InSAR Imaging. IEEE Geosci. Remote Sens. Lett. 2004, 1, 66–70. [Google Scholar] [CrossRef]
- Ferraioli, G.; Shabou, A.; Tupin, F.; Pascazio, V. Multichannel Phase Unwrapping with Graph Cuts. IEEE Geosci. Remote Sens. Lett. 2009, 6, 562–566. [Google Scholar] [CrossRef]
- Xie, X. Enhanced multi-baseline unscented Kalman filtering phase unwrapping algorithm. J. Syst. Eng. Electron. 2016, 27, 343–351. [Google Scholar] [CrossRef]
- Ambrosino, R.; Baselice, F.; Ferraioli, G.; Schirinzi, G. Extended kalman filter for multichannel InSAR height reconstruction. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5854–5863. [Google Scholar] [CrossRef]
- Ferraioli, G.; Deledalle, C.-A.; Denis, L.; Tupin, F. Parisar: Patch-Based Estimation and Regularized Inversion for Multibaseline SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1626–1636. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Lan, Y. Robust two-dimensional phase unwrapping for multibaseline SAR interferograms: A two-stage programming approach. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5217–5225. [Google Scholar] [CrossRef]
- Lan, Y.; Yu, H.; Xing, M. Refined Two-Stage Programming-Based Multi-Baseline Phase Unwrapping Approach Using Local Plane Model. Remote Sens. 2019, 11, 491. [Google Scholar] [CrossRef] [Green Version]
- Yan, G.; Shu, Z.; Tao, L.; Chen, Q.; Xiang, Z.; Li, S. Refined Two-Stage Programming Approach of Phase Unwrapping for Multi-Baseline SAR Interferograms Using the Unscented Kalman Filter. Remote Sens. 2019, 11, 199. [Google Scholar]
- Yuan, Z.; Deng, Y.; Li, F.; Wang, R.; Liu, G.; Han, X. Multichannel InSAR DEM Reconstruction through Improved Closed-Form Robust Chinese Remainder Theorem. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1314–1318. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Bao, Z. A Cluster-Analysis-Based Efficient Multibaseline Phase-Unwrapping Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 478–487. [Google Scholar] [CrossRef]
- Jiang, Z.; Wang, J.; Song, Q.; Zhou, Z. A Refined Cluster-Analysis-Based Multibaseline Phase-Unwrapping Algorithm. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1565–1569. [Google Scholar] [CrossRef]
- Liu, H.; Xing, M.; Bao, Z. A cluster-analysis-based noise-robust phase-unwrapping algorithm for multibaseline inter-ferograms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 494–504. [Google Scholar]
- Yuan, Z.; Lu, Z.; Chen, L.; Xing, X. A closed-form robust cluster-analysis-based multibaseline InSAR phase unwrapping and filtering algorithm with optimal baseline combination analysis. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4251–4262. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y.; Gong, S.; Xing, M. CANet: An Unsupervised Deep Convolutional Neural Network for Efficient Cluster-Analysis-Based Multibaseline InSAR Phase Unwrapping. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5212315. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y. Deep Convolutional Neural Network-Based Robust Phase Gradient Estimation for Two-Dimensional Phase Unwrapping Using SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4653–4665. [Google Scholar] [CrossRef]
- Spoorthi, G.E.; Gorthi, R.; Gorthi, S. PhaseNet: A deep convolutional neural network for two-dimensional phase unwrapping. IEEE Signal Process. Lett. 2019, 26, 54–58. [Google Scholar] [CrossRef]
- Spoorthi, G.E.; Gorthi, R.; Gorthi, S. PhaseNet 2.0: Phase Unwrapping of Noisy Data Based on Deep Learning Approach. IEEE Trans. Image Process. 2020, 29, 4862–4872. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y.; Xing, M. Artificial Intelligence in Interferometric Synthetic Aperture Radar Phase Unwrapping: A Review. IEEE Geosci. Remote Sens. Mag. 2021, 9, 10–28. [Google Scholar] [CrossRef]
- Ai, J.; Tian, R.; Luo, Q.; Jin, J.; Tang, B. Multi-Scale Rotation-Invariant Haar-Like Feature Integrated CNN-Based Ship Detection Algorithm of Multiple-Target Environment in SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10070–10087. [Google Scholar] [CrossRef]
- Ai, J.; Mao, Y.; Luo, Q.; Jia, L.; Xing, M. SAR Target Classification Using the Multikernel-Size Feature Fusion-Based Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5214313. [Google Scholar] [CrossRef]
- Zhu, X.X.; Montazeri, S.; Ali, M.; Hua, Y.; Wang, Y.; Mou, L.; Shi, Y.; Xu, F.; Bamler, R. Deep Learning Meets SAR: Concepts, models, pitfalls, and perspectives. IEEE Geosci. Remote Sens. Mag. 2021, 9, 143–172. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y.; Xing, M. Deep Learning-Based Branch-Cut Method for InSAR Two-Dimensional Phase Unwrapping. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5209615. [Google Scholar] [CrossRef]
- Sun, X.; Zimmer, A.; Mukherjee, S.; Kottayil, N.K.; Ghuman, P.; Cheng, I. DeepInSAR—A Deep Learning Framework for SAR Interferometric Phase Restora-tion and Coherence Estimation. Remote Sens. 2020, 12, 2340. [Google Scholar] [CrossRef]
- Xu, G.; Gao, Y.; Li, J.; Xing, M. InSAR Phase Denoising: A Review of Current Technologies and Future Directions. IEEE Geosci. Remote Sens. Mag. 2020, 8, 64–82. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-S.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef] [Green Version]
- Sica, F.; Cozzolino, D.; Zhu, X.X.; Verdoliva, L.; Poggi, G. InSAR-BM3D: A Nonlocal Filter for SAR Interferometric Phase Restoration. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3456–3467. [Google Scholar] [CrossRef] [Green Version]
- Ai, J.; Liu, R.; Tang, B.; Jia, L.; Zhao, J.; Zhou, F. A Refined Bilateral Filtering Algorithm Based on Adaptive-ly-Trimmed-Statistics for Speckle Reduction in SAR Imagery. IEEE Access 2019, 7, 103443–103455. [Google Scholar] [CrossRef]
- Ai, J.; Mao, Y.; Luo, Q.; Xing, M.; Jiang, K.; Jia, L.; Yang, X. Robust CFAR Ship Detector Based on Bilateral-Trimmed-Statistics of Complex Ocean Scenes in SAR Imagery: A Closed-Form Solution. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1872–1890. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Process. 2007, 16, 2080–2098. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments | Filtering Strategies | Interferogram One | Interferogram Two |
|---|---|---|---|
| Experiment 1 | No filtering | 79.84% | 79.26% |
| IFF | 97.78% | 97.77% | |
| ICF | 99.08% | 99.06% | |
| CNF | 99.85% | 99.87% | |
| UPF | 99.87% | 99.89% | |
| STF | 99.94% | 99.94% | |
| Experiment 2 | No filtering | 85.33% | 84.21% |
| IFF | 88.02% | 88.76% | |
| ICF | 95.23% | 95.37% | |
| CNF | 98.99% | 98.21% | |
| UPF | 99.22% | 98.87% | |
| STF | 99.47% | 99.33% | |
| Experiment 3 | No filtering | 82.46% | 81.22% |
| IFF | 89.21% | 87.69% | |
| ICF | 91.22% | 91.21% | |
| CNF | 95.41% | 95.57% | |
| UPF | 95.86% | 95.87% | |
| STF | 97.24% | 98.41% |
| Experiments | Filtering Strategies | NRSE |
|---|---|---|
| Experiment 1 | No filtering | 0.1812 |
| IFF | 0.0342 | |
| ICF | 0.0221 | |
| CNF | 0.0089 | |
| UPF | 0.008 | |
| STF | 0.0045 | |
| Experiment 2 | No filtering | 0.2954 |
| IFF | 0.2349 | |
| ICF | 0.1981 | |
| CNF | 0.1211 | |
| UPF | 0.1114 | |
| STF | 0.0974 | |
| Experiment 3 | No filtering | 0.3478 |
| IFF | 0.3117 | |
| ICF | 0.2498 | |
| CNF | 0.1469 | |
| UPF | 0.1413 | |
| STF | 0.1347 |
| Experiments | Filtering Strategies | Time (s) |
|---|---|---|
| Experiment 1 | IFF | 0.6275 |
| ICF | 0.6199 | |
| CNF | 0.6229 | |
| UPF | 0.6265 | |
| STF | 0.9598 | |
| Experiment 2 | IFF | 1.7787 |
| ICF | 1.7474 | |
| CNF | 1.7977 | |
| UPF | 1.7545 | |
| STF | 2.0869 | |
| Experiment 3 | IFF | 2.7977 |
| ICF | 2.8112 | |
| CNF | 2.7776 | |
| UPF | 2.7884 | |
| STF | 4.4857 |
| Interferogram One | Interferogram Two | |||
|---|---|---|---|---|
| TDX-1 | TSX-1 | TDX-2 | TSX-2 | |
| Incidence angle | 36.16° | 36.07° | 37.29° | 37.05° |
| Acquisition date | 2 April 2014 | 21 October 2012 | ||
| Normal baseline | 129.25 m | 361.90 m | ||
| Range pixel spacing | 5.45 m | |||
| Azimuth pixel spacing | 8.15 m | |||
| Center latitude | 35.28°N | |||
| Center longitude | 109.27°E | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Z.; Chen, T.; Xing, X.; Peng, W.; Chen, L. BM3D Denoising for a Cluster-Analysis-Based Multibaseline InSAR Phase-Unwrapping Method. Remote Sens. 2022, 14, 1836. https://doi.org/10.3390/rs14081836
Yuan Z, Chen T, Xing X, Peng W, Chen L. BM3D Denoising for a Cluster-Analysis-Based Multibaseline InSAR Phase-Unwrapping Method. Remote Sensing. 2022; 14(8):1836. https://doi.org/10.3390/rs14081836
Chicago/Turabian StyleYuan, Zhihui, Tianjiao Chen, Xuemin Xing, Wei Peng, and Lifu Chen. 2022. "BM3D Denoising for a Cluster-Analysis-Based Multibaseline InSAR Phase-Unwrapping Method" Remote Sensing 14, no. 8: 1836. https://doi.org/10.3390/rs14081836
APA StyleYuan, Z., Chen, T., Xing, X., Peng, W., & Chen, L. (2022). BM3D Denoising for a Cluster-Analysis-Based Multibaseline InSAR Phase-Unwrapping Method. Remote Sensing, 14(8), 1836. https://doi.org/10.3390/rs14081836