
Statewide USGS 3DEP Lidar Topographic Differencing Applied to Indiana, USA

 , , and
, , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Background
2.1. Topographic Differencing
2.2. Digital Elevation Model Generation
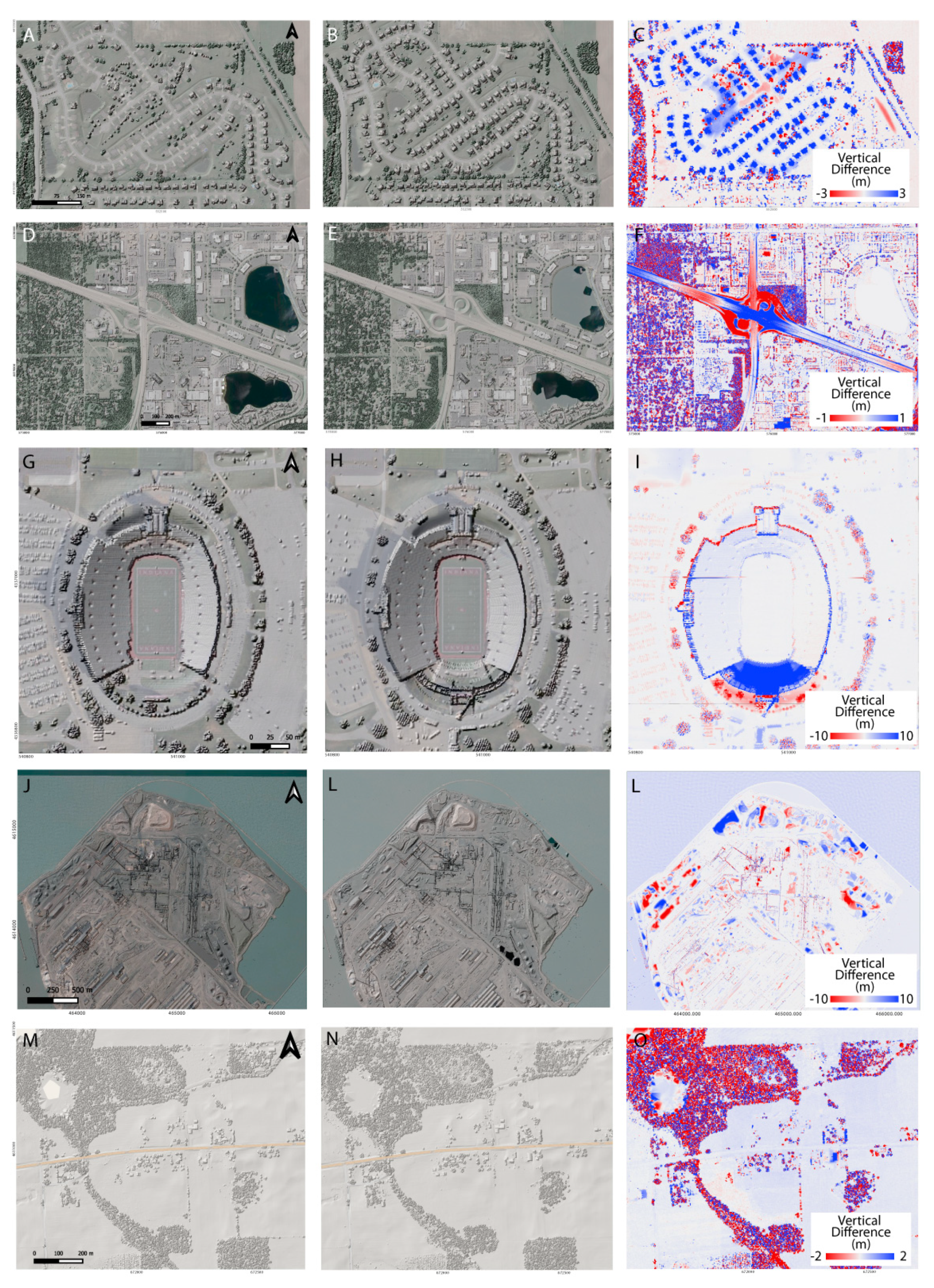
2.3. Vertical Raster-Based Differencing
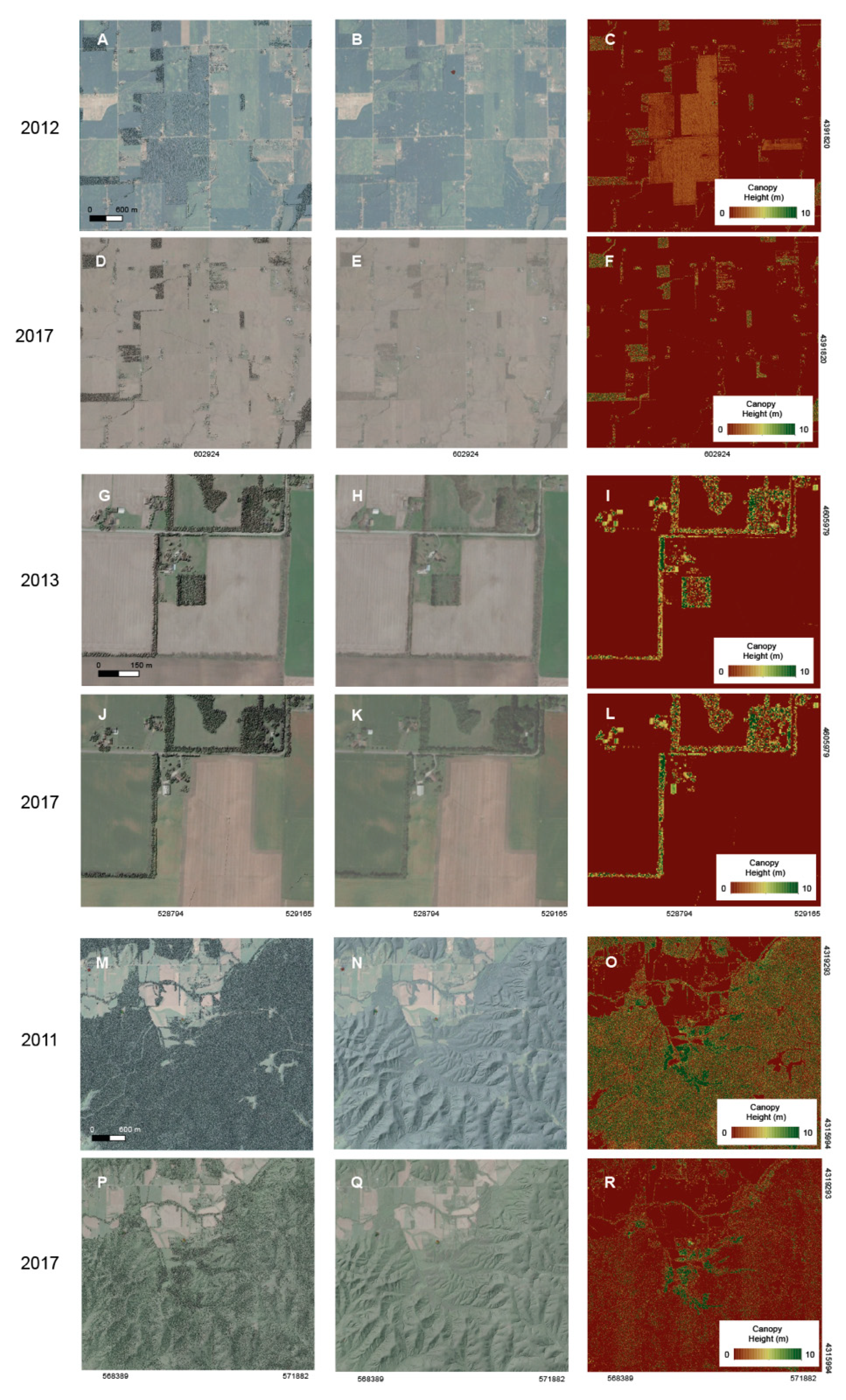
2.4. Canopy Height Model
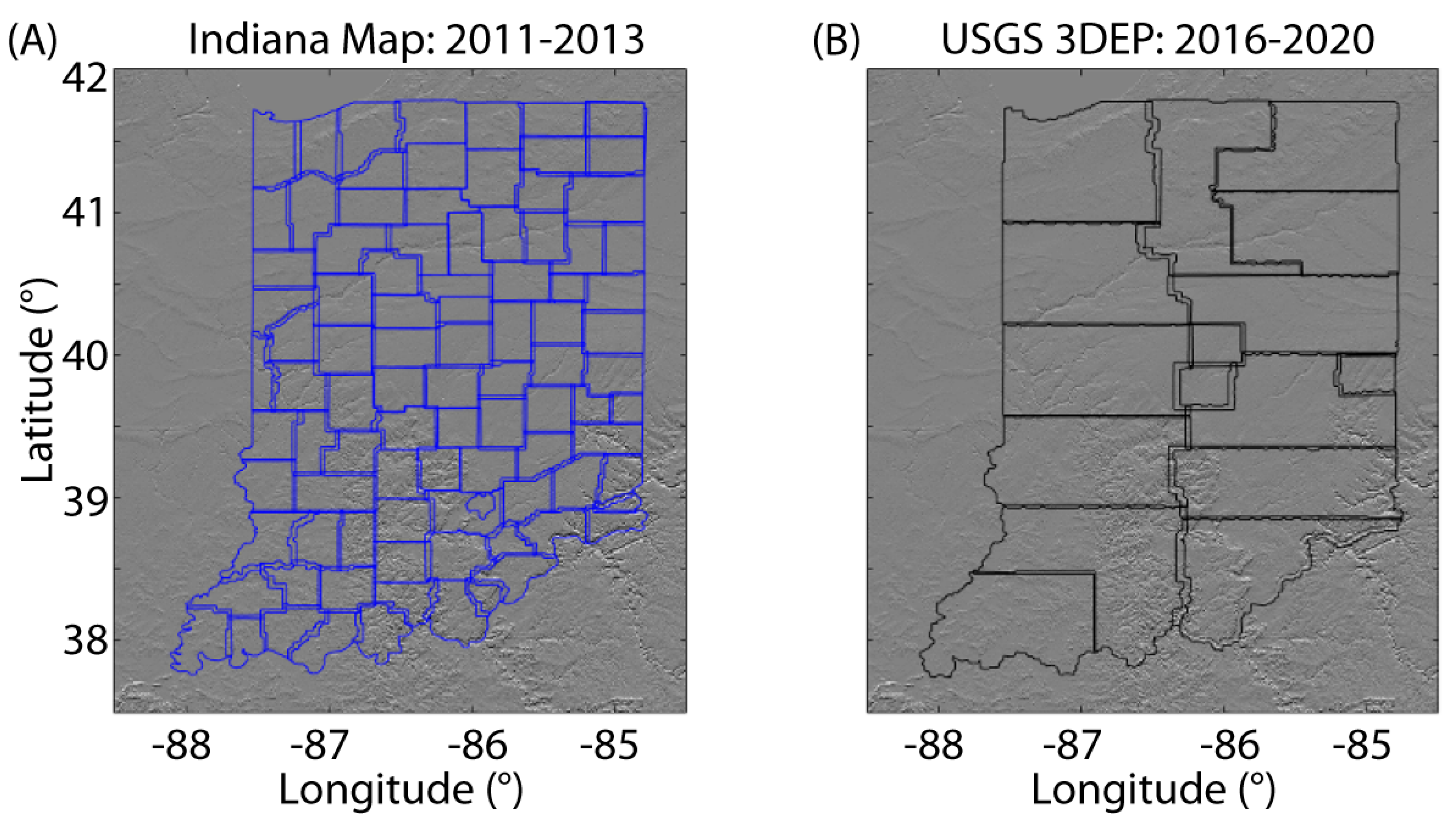
3. Datasets
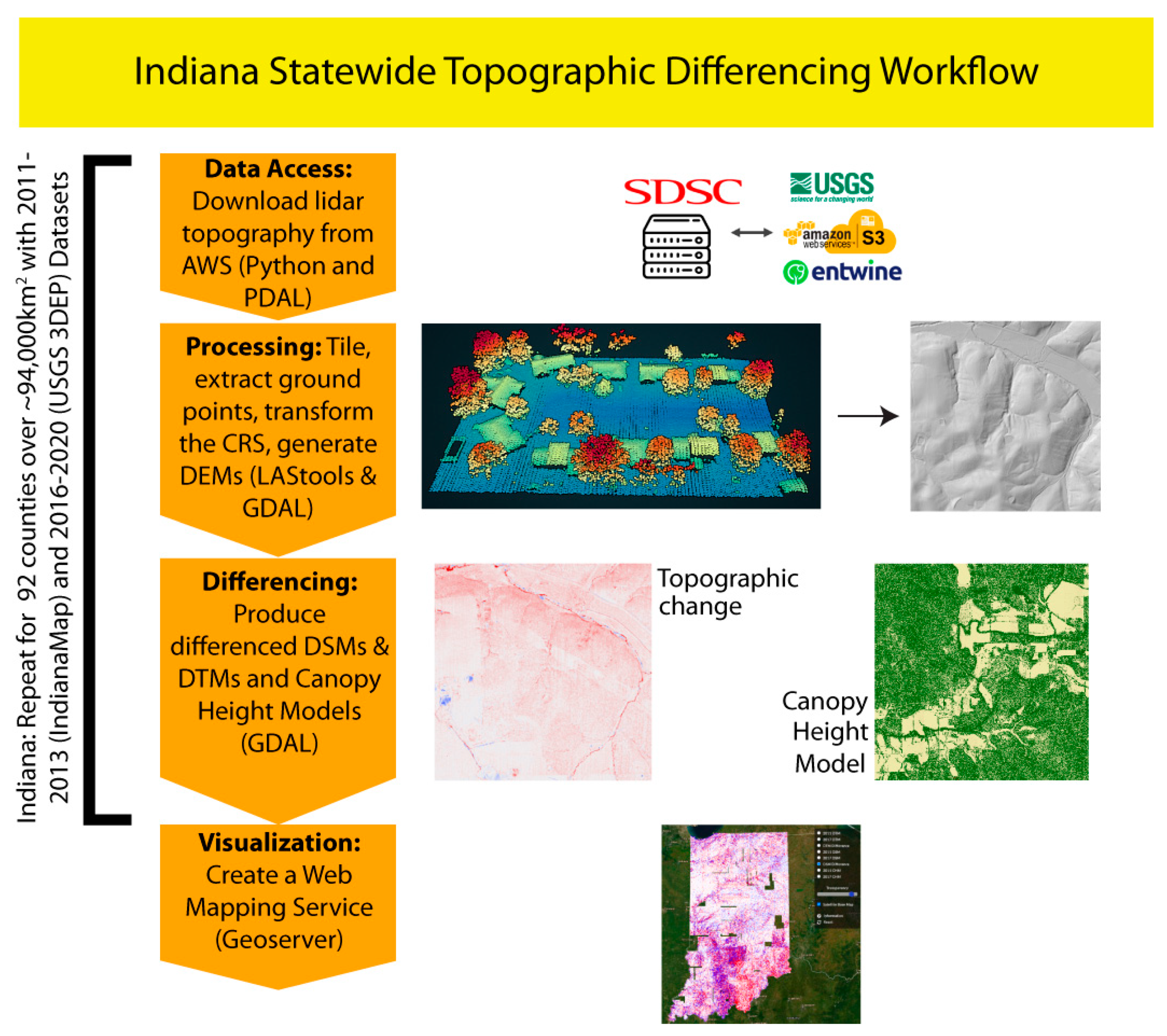
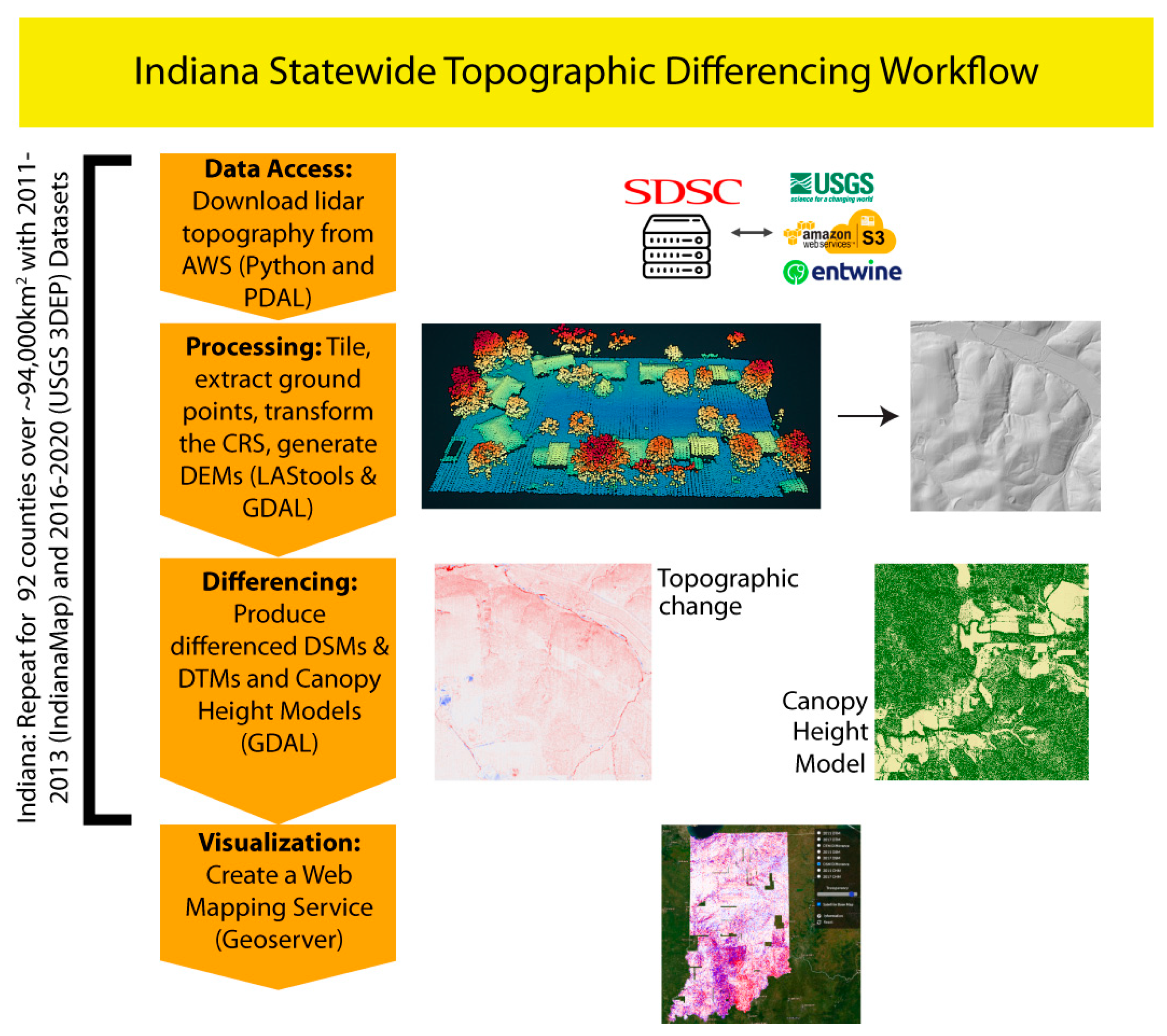
4. Methods
5. Results
6. Discussion
6.1. Large-Scale Topographic Differencing Challenges
6.2. Future Topographic Differencing
6.3. Other Large-Scale Processing
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Casu, F.; Manunta, M.; Agram, P.S.; Crippen, R.E. Big Remotely Sensed Data: Tools, Applications and Experiences. Remote Sens. Environ. 2017, 202, 1–2. [Google Scholar] [CrossRef]
- Runting, R.K.; Phinn, S.; Xie, Z.; Venter, O.; Watson, J.E.M. Opportunities for Big Data in Conservation and Sustainability. Nat. Commun 2020, 11, 2003. [Google Scholar] [CrossRef]
- Loveland, T.R.; Dwyer, J.L. Landsat: Building a Strong Future. Remote Sens. Environ. 2012, 122, 22–29. [Google Scholar] [CrossRef]
- Showstack, R. Sentinel Satellites Initiate New Era in Earth Observation. Eos Trans. AGU 2014, 95, 239–240. [Google Scholar] [CrossRef]
- U.S. Geological Survey Lidar Point Cloud—USGS National Map 3DEP Downloadable Data Collection. U.S. Geol. Surv. 2018. Available online: https://www.usgs.gov/programs/national-geospatial-program/national-map (accessed on 1 July 2021).
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanase, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical Background and Current Developments for Mapping Burned Area from Satellite Earth Observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Guerriero, L.; Ruzza, G.; Guadagno, F.M.; Revellino, P. Flood Hazard Mapping Incorporating Multiple Probability Models. J. Hydrol. 2020, 587, 125020. [Google Scholar] [CrossRef]
- Kruitwagen, L.; Story, K.T.; Friedrich, J.; Byers, L.; Skillman, S.; Hepburn, C. A Global Inventory of Photovoltaic Solar Energy Generating Units. Nature 2021, 598, 604–610. [Google Scholar] [CrossRef]
- Murray, N.J.; Phinn, S.R.; DeWitt, M.; Ferrari, R.; Johnston, R.; Lyons, M.B.; Clinton, N.; Thau, D.; Fuller, R.A. The Global Distribution and Trajectory of Tidal Flats. Nature 2019, 565, 222–225. [Google Scholar] [CrossRef]
- Bhangale, U.; Durbha, S.S.; King, R.L.; Younan, N.H.; Vatsavai, R. High Performance GPU Computing Based Approaches for Oil Spill Detection from Multi-Temporal Remote Sensing Data. Remote Sens. Environ. 2017, 202, 28–44. [Google Scholar] [CrossRef]
- Costantini, M.; Ferretti, A.; Minati, F.; Falco, S.; Trillo, F.; Colombo, D.; Novali, F.; Malvarosa, F.; Mammone, C.; Vecchioli, F.; et al. Analysis of Surface Deformations over the Whole Italian Territory by Interferometric Processing of ERS, Envisat and COSMO-SkyMed Radar Data. Remote Sens. Environ. 2017, 202, 250–275. [Google Scholar] [CrossRef]
- Albino, F.; Smets, B.; d’Oreye, N.; Kervyn, F. High-Resolution TanDEM-X DEM: An Accurate Method to Estimate Lava Flow Volumes at Nyamulagira Volcano (D. R. Congo): TANDEM-X DEM TO DERIVE LAVA FLOW VOLUMES. J. Geophys. Res. Solid Earth 2015, 120, 4189–4207. [Google Scholar] [CrossRef] [Green Version]
- Bull, J.M.; Miller, H.; Gravley, D.M.; Costello, D.; Hikuroa, D.C.H.; Dix, J.K. Assessing Debris Flows Using LIDAR Differencing: 18 May 2005 Matata Event, New Zealand. Geomorphology 2010, 124, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Dietterich, H.R.; Diefenbach, A.K.; Soule, S.A.; Zoeller, M.H.; Patrick, M.P.; Major, J.J.; Lundgren, P.R. Lava Effusion Rate Evolution and Erupted Volume during the 2018 Kīlauea Lower East Rift Zone Eruption. Bull. Volcanol. 2021, 83, 25. [Google Scholar] [CrossRef]
- Izumida, A.; Uchiyama, S.; Sugai, T. Application of UAV-SfM Photogrammetry and Aerial Lidar to a Disastrous Flood: Repeated Topographic Measurement of a Newly Formed Crevasse Splay of the Kinu River, Central Japan. Nat. Hazards Earth Syst. Sci. 2017, 17, 1505–1519. [Google Scholar] [CrossRef] [Green Version]
- Scott, C.P.; Arrowsmith, J.R.; Nissen, E.; Lajoie, L.; Maruyama, T.; Chiba, T. The M 7 2016 Kumamoto, Japan, Earthquake: 3-D Deformation along the Fault and Within the Damage Zone Constrained From Differential Lidar Topography. J. Geophys. Res. Solid Earth 2018, 123, 6138–6155. [Google Scholar] [CrossRef]
- Scott, C.P.; DeLong, S.B.; Arrowsmith, J.R. Distribution of Aseismic Deformation Along the Central San Andreas and Calaveras Faults from Differencing Repeat Airborne Lidar. Geophys. Res. Lett. 2020, 47, 1–10. [Google Scholar] [CrossRef]
- Wedmore, L.N.J.; Gregory, L.C.; McCaffrey, K.J.W.; Goodall, H.; Walters, R.J. Partitioned Off-Fault Deformation in the 2016 Norcia Earthquake Captured by Differential Terrestrial Laser Scanning. Geophys. Res. Lett. 2019, 46, 3199–3205. [Google Scholar] [CrossRef] [Green Version]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for Uncertainty in DEMs from Repeat Topographic Surveys: Improved Sediment Budgets. Earth Surf. Processes Landf. 2009, 35, 136–156. [Google Scholar] [CrossRef]
- Indiana Map 2011–2013 Indiana Statewide LiDAR. Open Topography 2012. [CrossRef]
- Barnhart, W.D.; Gold, R.D.; Shea, H.N.; Peterson, K.E.; Briggs, R.W.; Harbor, D.J. Vertical Coseismic Offsets Derived from High-Resolution Stereogrammetric DSM Differencing: The 2013 Baluchistan, Pakistan Earthquake. J. Geophys. Res. Solid Earth 2019, 124, 6039–6055. [Google Scholar] [CrossRef]
- DeLong, S.; Engle, Z.; Hammer, M.; Scott, C.P.; Arrowsmith, J.R. Regional-Scale Landscape Change: Data Preparation and Two Examples Using Object-Based Image Analysis and Windowed Iterative Closest Point Algorithm to Interrogate Results. In Proceedings of the AGU Fall Meeting Abstracts, Washington, DC, USA, 7 December 2020. [Google Scholar]
- Hilgendorf, Z.; Marvin, M.C.; Turner, C.M.; Walker, I.J. Assessing Geomorphic Change in Restored Coastal Dune Ecosystems Using a Multi-Platform Aerial Approach. Remote Sens. 2021, 13, 354. [Google Scholar] [CrossRef]
- Scott, C.; Bunds, M.; Shirzaei, M.; Toke, N. Creep along the Central San Andreas Fault from Surface Fractures, Topographic Differencing, and InSAR. J. Geophys. Res. Solid Earth 2020, 125, 1–16. [Google Scholar] [CrossRef]
- Crosby, C.J.; Arrowsmith, J.R.; Nandigam, V. Chapter 11—Zero to a Trillion: Advancing Earth Surface Process Studies with Open Access to High-Resolution Topography. In Remote Sensing of Geomorphology; Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2020; Volume 33, pp. 317–338. [Google Scholar]
- Crosby, C.J.; Arrowsmith, J.R.; Nandigam, V.; Baru, C. Online Access and Processing of LiDAR Topography Data. In Geoinformatics; Keller, G.R., Baru, C., Eds.; Cambridge University Press: Cambridge, UK, 2011; pp. 251–265. ISBN 978-0-511-97630-8. [Google Scholar]
- Krishnan, S.; Crosby, C.; Nandigam, V.; Phan, M.; Cowart, C.; Baru, C.; Arrowsmith, R. OpenTopography: A Services Oriented Architecture for Community Access to LIDAR Topography. In Proceedings of the 2nd International Conference on Computing for Geospatial Research & Applications—COM.Geo ’11, Washington, DC, USA, 23–25 May 2011; ACM Press: Washington, DC, USA, 2011; pp. 1–8. [Google Scholar]
- Scott, C.; Phan, M.; Nandigam, V.; Crosby, C.; Arrowsmith, J.R. Measuring Change at Earth’s Surface: On-Demand Vertical and Three-Dimensional Topographic Differencing Implemented in Open Topography. Geosphere 2021, 17, 1318–1332. [Google Scholar] [CrossRef]
- Oskin, M.E.; Arrowsmith, J.R.; Corona, A.H.; Elliott, A.J.; Fletcher, J.M.; Fielding, E.J.; Gold, P.O.; Garcia, J.J.G.; Hudnut, K.W.; Liu-Zeng, J.; et al. Near-Field Deformation from the El Mayor-Cucapah Earthquake Revealed by Differential LIDAR. Science 2012, 335, 702–705. [Google Scholar] [CrossRef] [Green Version]
- Bellekens, B.; Spruyt, V.; Berkvens, R.; Maarten, W. A Survey of Rigid 3D Pointcloud Registration Algorithms. In Proceedings of the AMBIENT 2014: The Fourth International Conference on Ambient Computing, Applications, Services and Technologies, Rome, Italy, 24–28 August 2014. [Google Scholar]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Nissen, E.; Maruyama, T.; Ramon Arrowsmith, J.; Elliott, J.R.; Krishnan, A.K.; Oskin, M.E.; Saripalli, S. Coseismic Fault Zone Deformation Revealed with Differential Lidar: Examples from Japanese ∼7 Intraplate Earthquakes. Earth Planet. Sci. Lett. 2014, 405, 244–256. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D Comparison of Complex Topography with Terrestrial Laser Scanner: Application to the Rangitikei Canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef] [Green Version]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Ekhtari, N.; Glennie, C. High-Resolution Mapping of Near-Field Deformation with Airborne Earth Observation Data, a Comparison Study. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1–17. [Google Scholar] [CrossRef]
- Glennie, C. Rigorous 3D Error Analysis of Kinematic Scanning LIDAR Systems. J. Appl. Geod. 2007, 1, 147–157. [Google Scholar] [CrossRef]
- Goulden, T.; Hopkinson, C. The Forward Propagation of Integrated System Component Errors within Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2010, 76, 589–601. [Google Scholar] [CrossRef]
- Toth, C.; Brzezinska, D.; Csanyi, N.; Paska, E.; Yastikli, N. LiDAR Mapping Sup-Porting Earthquake Research of the San Andreas Fault. In Proceedings of the ASPRS 2007 Annual Conference. American Society for Photogrammetry and Remote Sensing, Tampa, FL, USA, 7–11 May 2007; pp. 1–11. [Google Scholar]
- Liu, X. Airborne LiDAR for DEM Generation: Some Critical Issues. Prog. Phys. Geogr. Earth Environ. 2008, 32, 31–49. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Bresnahan, P. Accuracy of Airborne Lidar-Derived Elevation. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Shan, S.; Bevis, M.; Kendrick, E.; Mader, G.L.; Raleigh, D.; Hudnut, K.; Sartori, M.; Phillips, D. Kinematic GPS Solutions for Aircraft Trajectories: Identifying and Minimizing Systematic Height Errors Associated with Atmospheric Propagation Delays. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef] [Green Version]
- Glennie, C.L.; Hinojosa-Corona, A.; Nissen, E.; Kusari, A.; Oskin, M.E.; Arrowsmith, J.R.; Borsa, A. Optimization of Legacy Lidar Data Sets for Measuring Near-Field Earthquake Displacements. Geophys. Res. Lett. 2014, 41, 3494–3501. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Valeo, C.; Habib, A. Digital Terrain Modeling: Acquisition, Manipulation, and Applications; Artech House: Boston, MA, USA, 2005; p. 270. [Google Scholar]
- Passalacqua, P.; Belmont, P.; Staley, D.M.; Simley, J.D.; Arrowsmith, J.R.; Bode, C.A.; Crosby, C.; DeLong, S.B.; Glenn, N.F.; Kelly, S.A.; et al. Analyzing High Resolution Topography for Advancing the Understanding of Mass and Energy Transfer through Landscapes: A Review. Earth-Sci. Rev. 2015, 148, 174–193. [Google Scholar] [CrossRef] [Green Version]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological Sensitivity of Morphometric Estimates of Coarse Fluvial Sediment Transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Smith, T.; Rheinwalt, A.; Bookhagen, B. Determining the Optimal Grid Resolution for Topographic Analysis on an Airborne Lidar Dataset. Earth Surf. Dyn. 2019, 7, 475–489. [Google Scholar] [CrossRef] [Green Version]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. LidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- García, V.H.; Hongn, F.; Cristallini, E.O. Late Miocene to Recent Morphotectonic Evolution and Potential Seismic Hazard of the Northern Lerma Valley: Clues from Lomas de Medeiros, Cordillera Oriental, NW Argentina. Tectonophys 2013, 608, 1238–1253. [Google Scholar] [CrossRef]
- PDAL Contributors PDAL Point Data Abstraction Library; Zenodo. 2018. Available online: https://zenodo.org/record/2556738#.YgXM6v5ByUk (accessed on 1 July 2021).
- Isenburg, M. LAStools—Efficient Tools for Lidar Processing. 2019. Available online: https://rapidlasso.com/lastool (accessed on 1 July 2021).
- Isenburg, M.; Liu, Y.; Snoeyink, J.; Thirion, T. Generating Raster DEM from Mass Points via TIN Streaming. In Proceedings of the GIScience’06 Conference Proceedings, Münster, Germany, 20–23 September 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 186–198. [Google Scholar]
- GDAL/OGR Contributors GDAL/OGR Geospatial Data Abstraction Software Library; Open Source Geospatial Foundation: Chicago, IL, USA, 2019.
- Troy, C.D.; Cheng, Y.-T.; Lin, Y.-C.; Habib, A. Rapid Lake Michigan Shoreline Changes Revealed by UAV LiDAR Surveys. Coast. Eng. 2021, 170, 104008. [Google Scholar] [CrossRef]
- Lee, E.S.; Krothe, N.C. A Four-Component Mixing Model for Water in a Karst Terrain in South-Central Indiana, USA. Using Solute Concentration and Stable Isotopes as Tracers. Chem. Geol. 2001, 179, 129–143. [Google Scholar] [CrossRef]
- Robinson, S.E.; Bohon, W.; Kleber, E.J.; Arrowsmith, J.R.; Crosby, C.J. Applications of High-Resolution Topography in Earth Science Education. Geosphere 2017, 13, 1887–1900. [Google Scholar] [CrossRef] [Green Version]
- Prakash, N.; Manconi, A.; Loew, S. Mapping Landslides on EO Data: Performance of Deep Learning Models vs. Traditional Machine Learning Models. Remote Sens. 2020, 12, 346. [Google Scholar] [CrossRef] [Green Version]
- Subedi, P.; Subedi, K.; Thapa, B.; Subedi, P. Sinkhole Susceptibility Mapping in Marion County, Florida: Evaluation and Comparison between Analytical Hierarchy Process and Logistic Regression Based Approaches. Sci Rep. 2019, 9, 7140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sare, R.; Hilley, G.E.; DeLong, S.B. Regional-Scale Detection of Fault Scarps and Other Tectonic Landforms: Examples from Northern California. J. Geophys. Res. Solid Earth 2019, 124, 1016–1035. [Google Scholar] [CrossRef]
- Scott, C.P.; Giampetro, T.; Brigham, C.; Leclerc, F.; Manighetti, I.; Arrowsmith, J.R.; Lao-Davila, D.; Mattéo, L. Mapping Normal Faults and Measuring Scarp Height from Topography: Application to the Volcanic Tablelands and the Hurricane Fault, Western US. Lithosphere. in press. [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [Green Version]
- Malambo, L.; Popescu, S.C. Assessing the Agreement of ICESat-2 Terrain and Canopy Height with Airborne Lidar over US Ecozones. Remote Sens. Environ. 2021, 266, 112711. [Google Scholar] [CrossRef]
- Huang, M.-H.; Fielding, E.J.; Dickinson, H.; Sun, J.; Gonzalez-Ortega, J.A.; Freed, A.M.; Bürgmann, R. Fault Geometry Inversion and Slip Distribution of the 2010 M w 7.2 El Mayor-Cucapah Earthquake from Geodetic Data: El Mayor-Cucapah Coseismic Displacement. J. Geophys. Res. Solid Earth 2017, 122, 607–621. [Google Scholar] [CrossRef] [Green Version]
- Bergen, K.J.; Johnson, P.A.; de Hoop, M.V.; Beroza, G.C. Machine Learning for Data-Driven Discovery in Solid Earth Geoscience. Science 2019, 363, eaau0323. [Google Scholar] [CrossRef] [PubMed]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scott, C.P.; Beckley, M.; Phan, M.; Zawacki, E.; Crosby, C.; Nandigam, V.; Arrowsmith, R. Statewide USGS 3DEP Lidar Topographic Differencing Applied to Indiana, USA. Remote Sens. 2022, 14, 847. https://doi.org/10.3390/rs14040847
Scott CP, Beckley M, Phan M, Zawacki E, Crosby C, Nandigam V, Arrowsmith R. Statewide USGS 3DEP Lidar Topographic Differencing Applied to Indiana, USA. Remote Sensing. 2022; 14(4):847. https://doi.org/10.3390/rs14040847
Chicago/Turabian StyleScott, Chelsea Phipps, Matthew Beckley, Minh Phan, Emily Zawacki, Christopher Crosby, Viswanath Nandigam, and Ramon Arrowsmith. 2022. "Statewide USGS 3DEP Lidar Topographic Differencing Applied to Indiana, USA" Remote Sensing 14, no. 4: 847. https://doi.org/10.3390/rs14040847
APA StyleScott, C. P., Beckley, M., Phan, M., Zawacki, E., Crosby, C., Nandigam, V., & Arrowsmith, R. (2022). Statewide USGS 3DEP Lidar Topographic Differencing Applied to Indiana, USA. Remote Sensing, 14(4), 847. https://doi.org/10.3390/rs14040847