
A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model





Abstract
:
1. Introduction
2. Materials and Methods
2.1. Theoretical Backgrounds
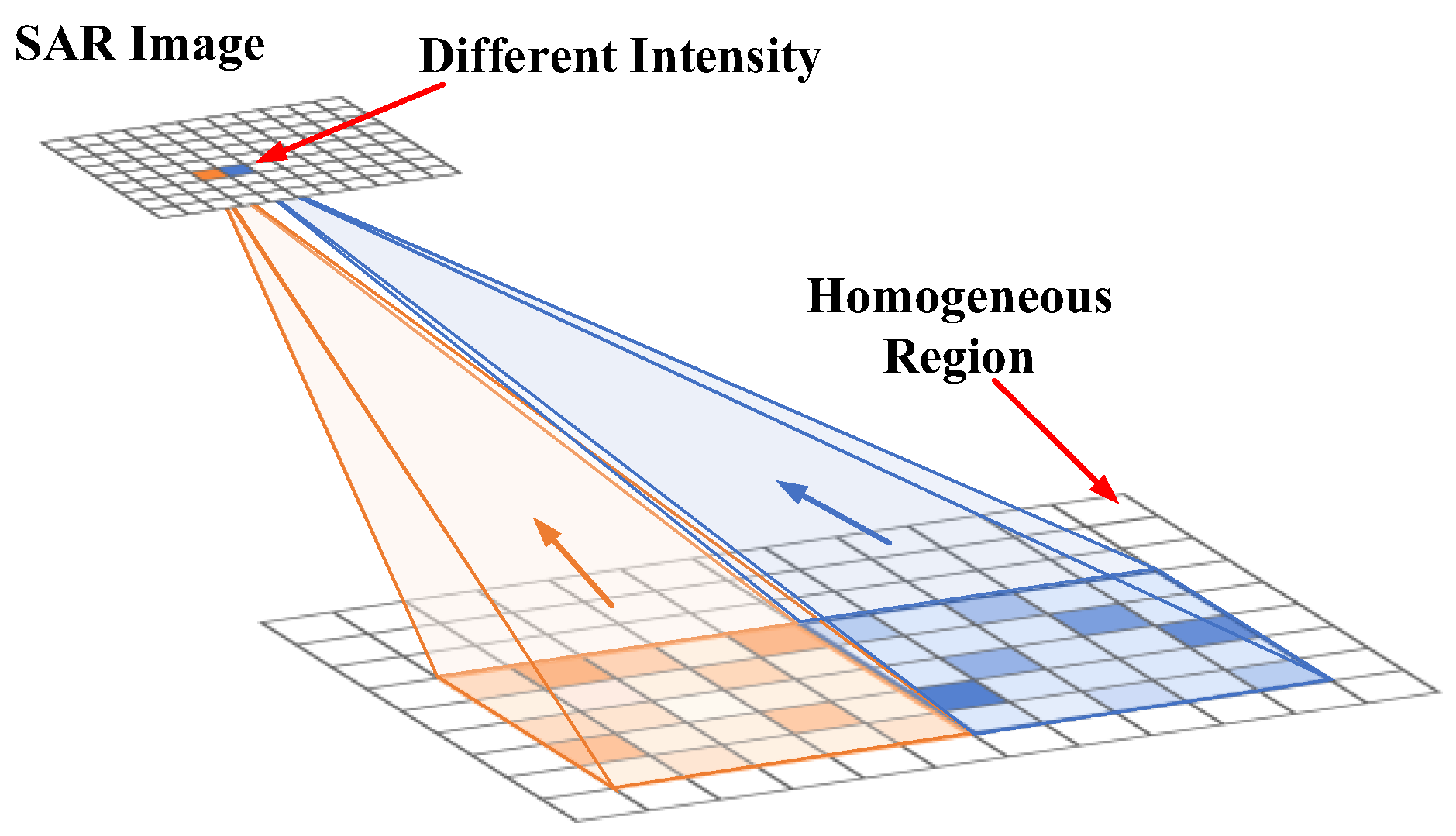
2.1.1. Principle of Speckle Noise
2.1.2. Total Variation Model
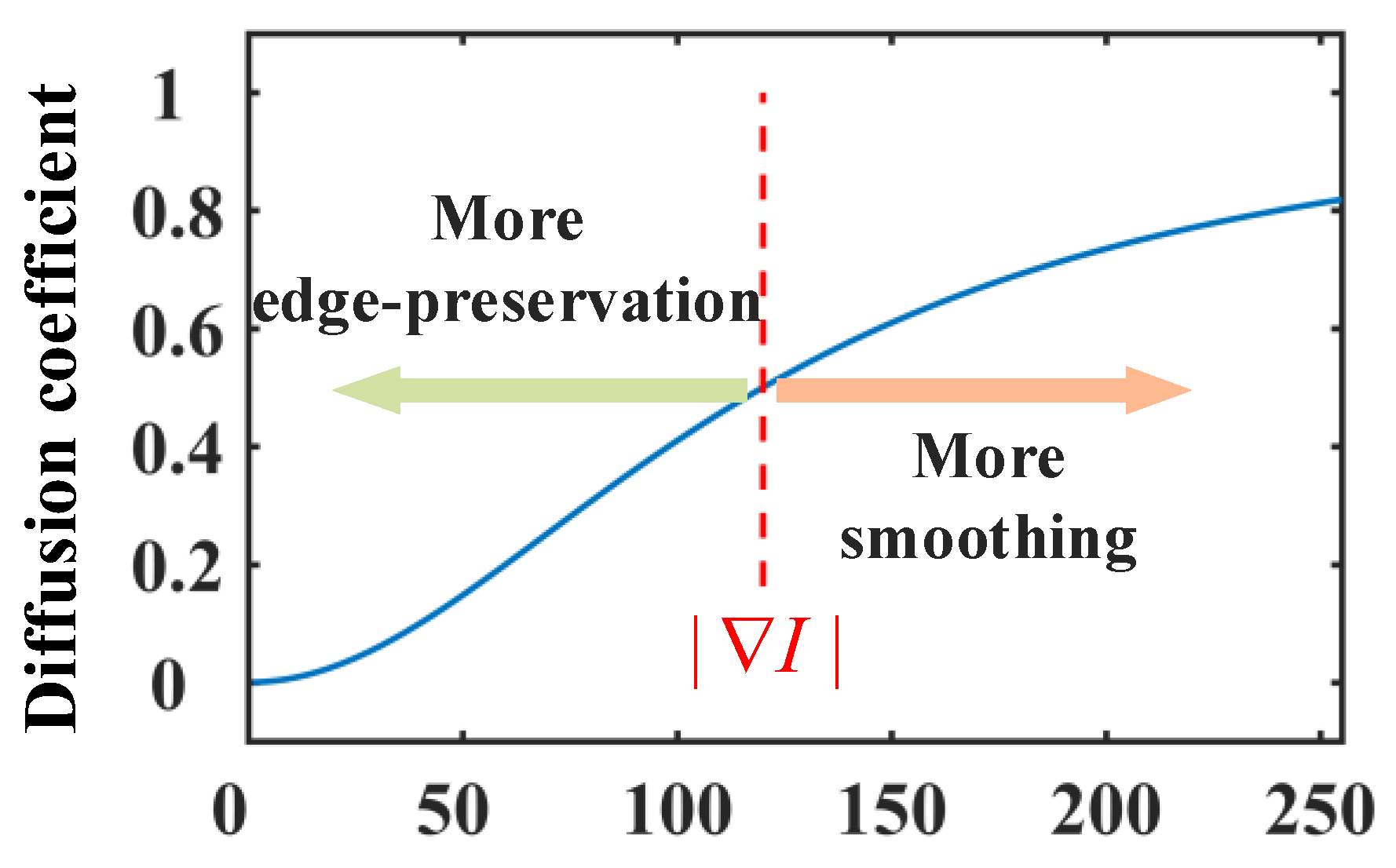
2.1.3. Anisotropic Diffusion Filter PDE Model
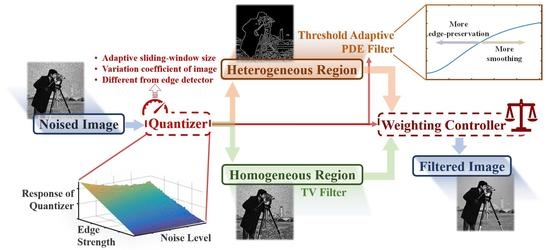
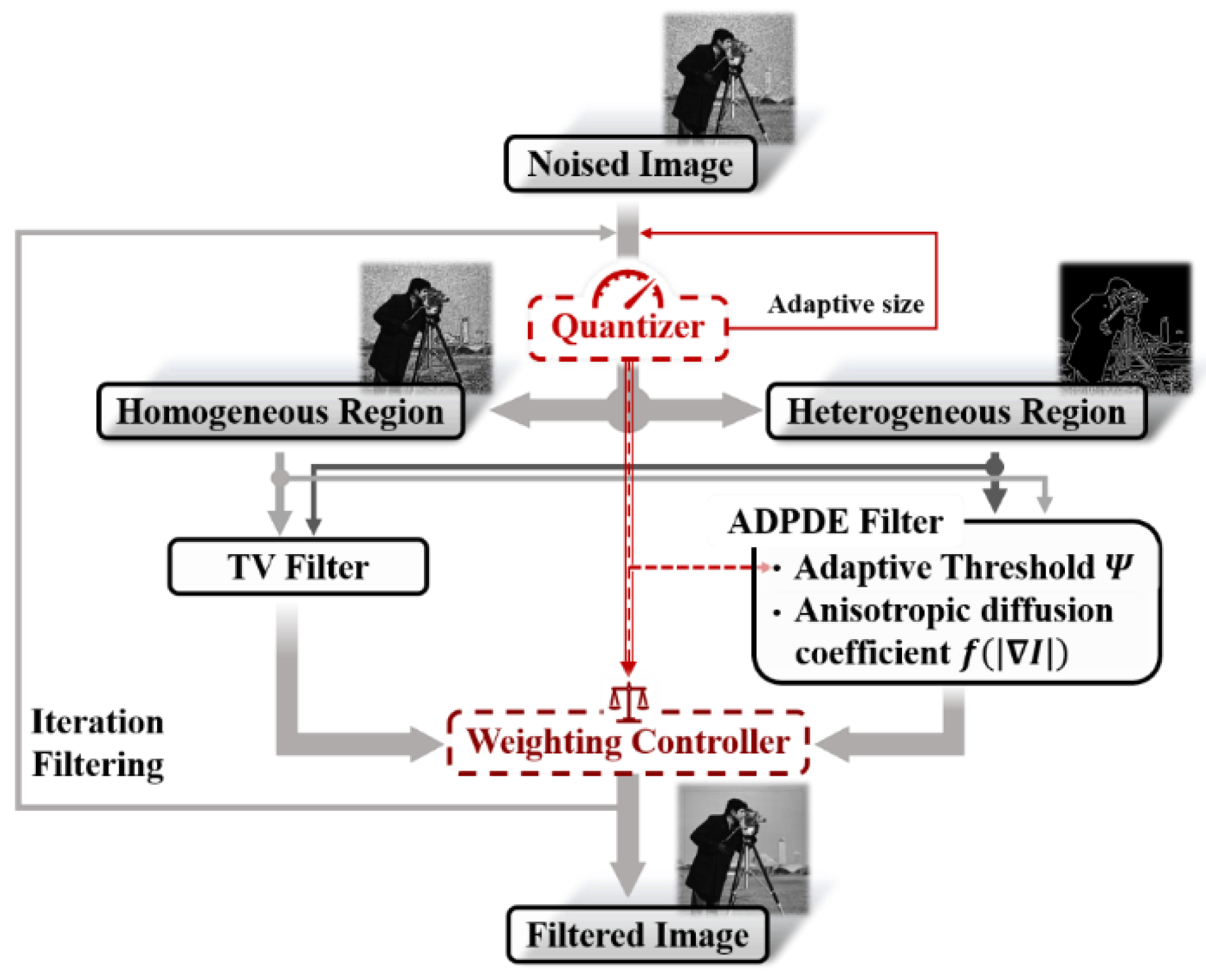
2.2. Proposed Method
2.2.1. Pixel Position Quantizer
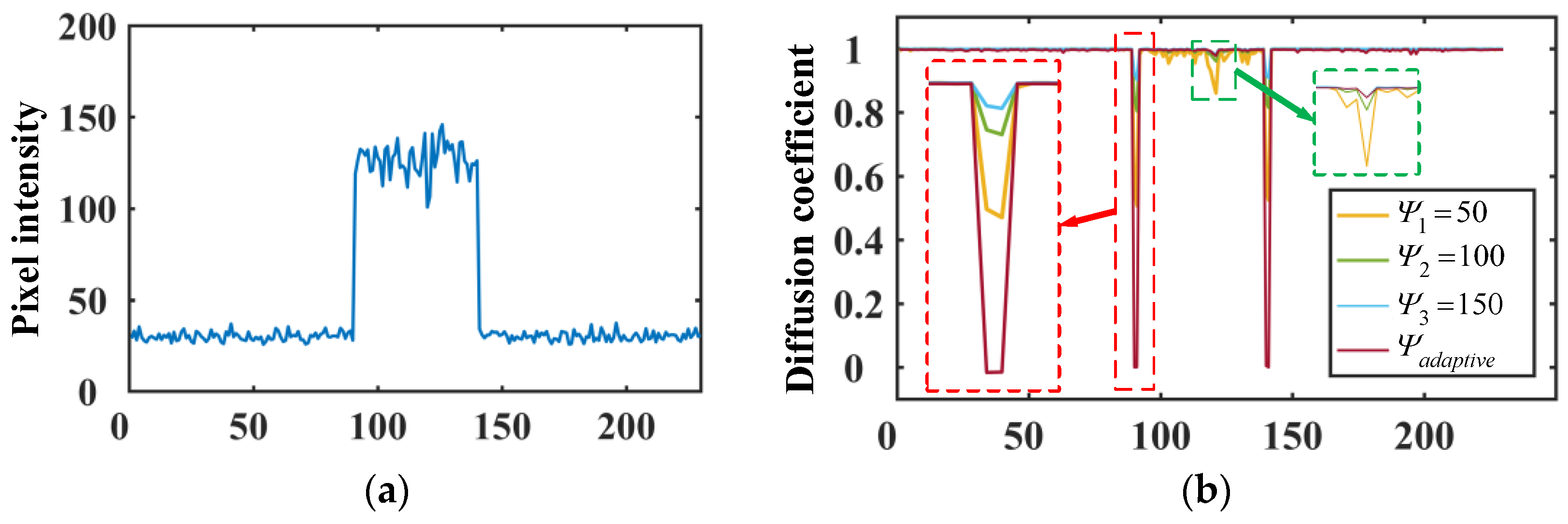
2.2.2. Threshold Adaptive ADPDE Model
| Algorithm 1 Threshold adaptive ADPDE filter |
| Input: The noised image , iteration times , step size for iteration. |
| Output: The filtered image . |
| Initialize:,,. |
| Begin |
| 1: for do |
| 2: Obtain the magnitude of image ; |
| 3: Obtain the quantizer response on by (15); |
| 4: Calculate the adaptive threshold for every pixel by (18); |
| 5: Get the diffusion coefficient by (10); |
| 6: Generate the new image result by gradient descent method in (20). |
| 10: ; |
| 11: end |
| 12: The output image ; |
| End |
2.2.3. Combination Model of TV and ADPDE
3. Results
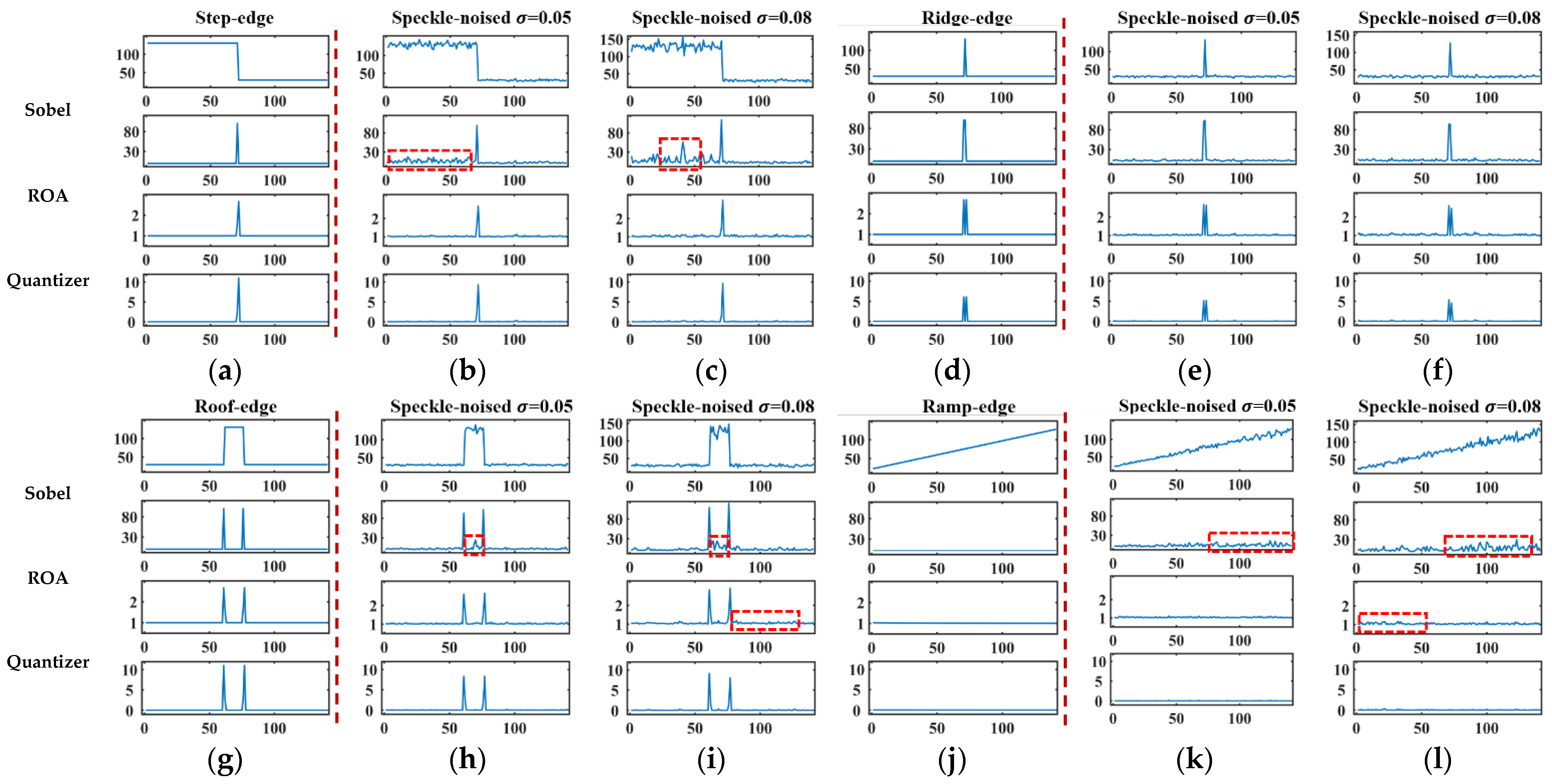
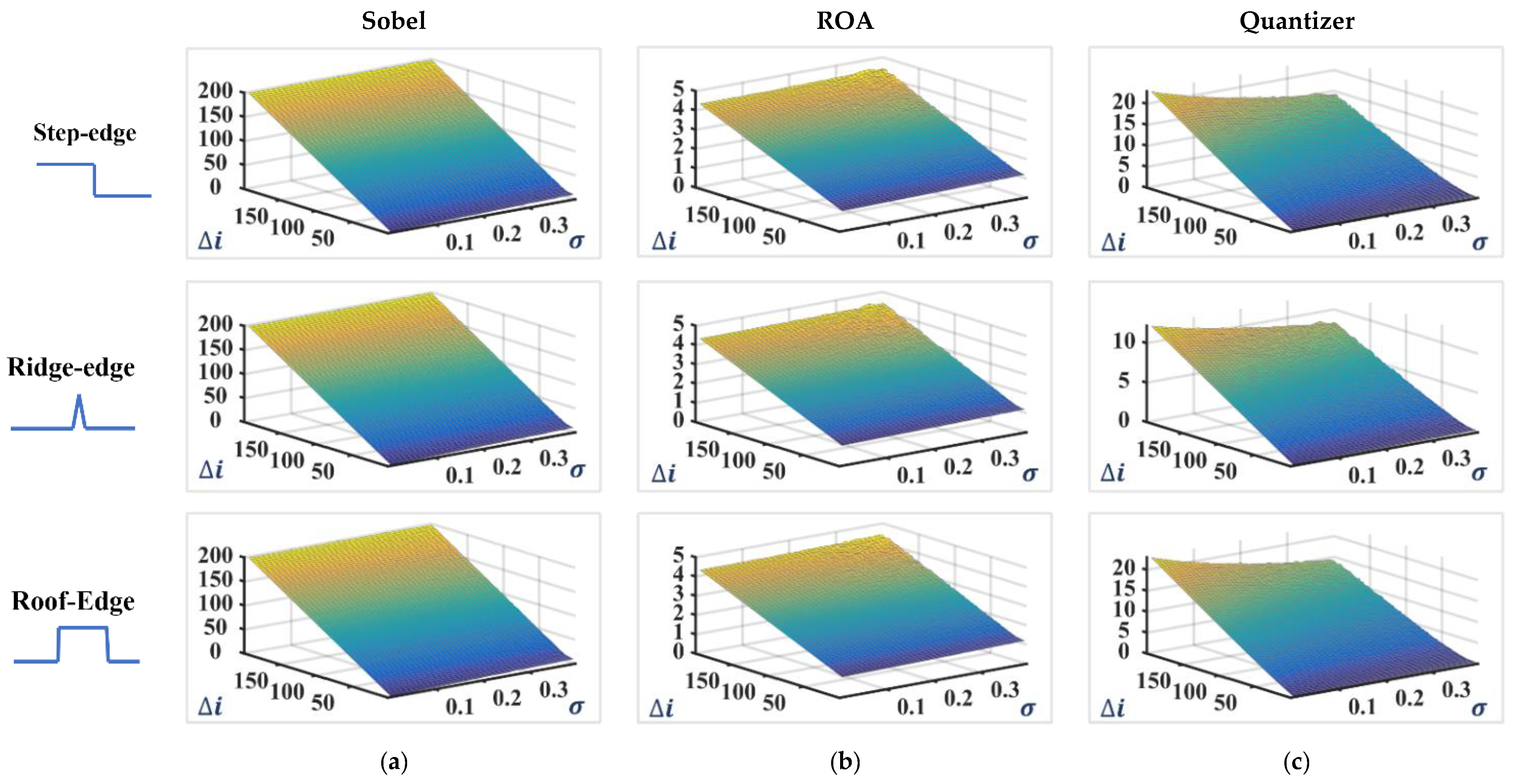
3.1. Monte Carlo Simulations for the Quantizer
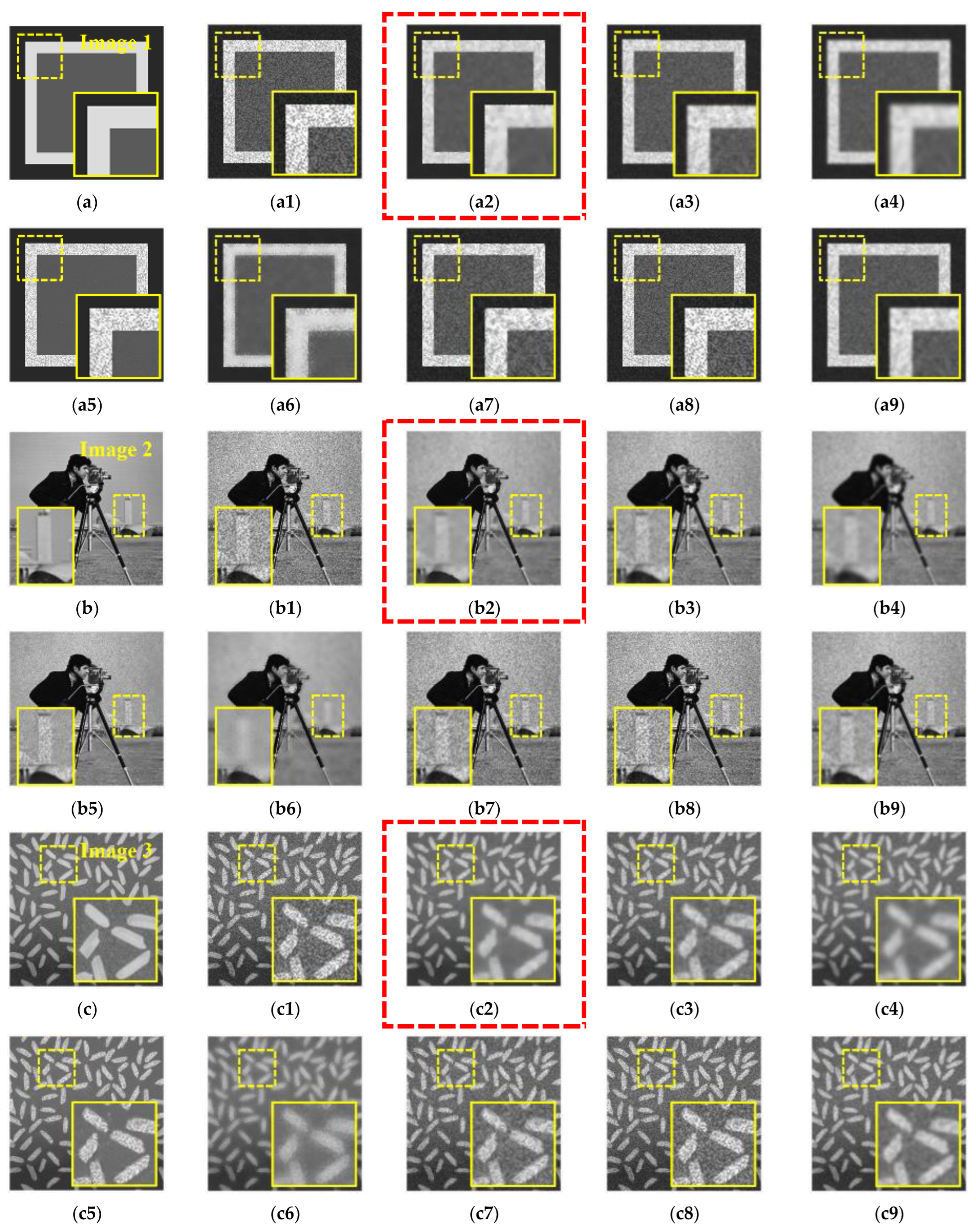
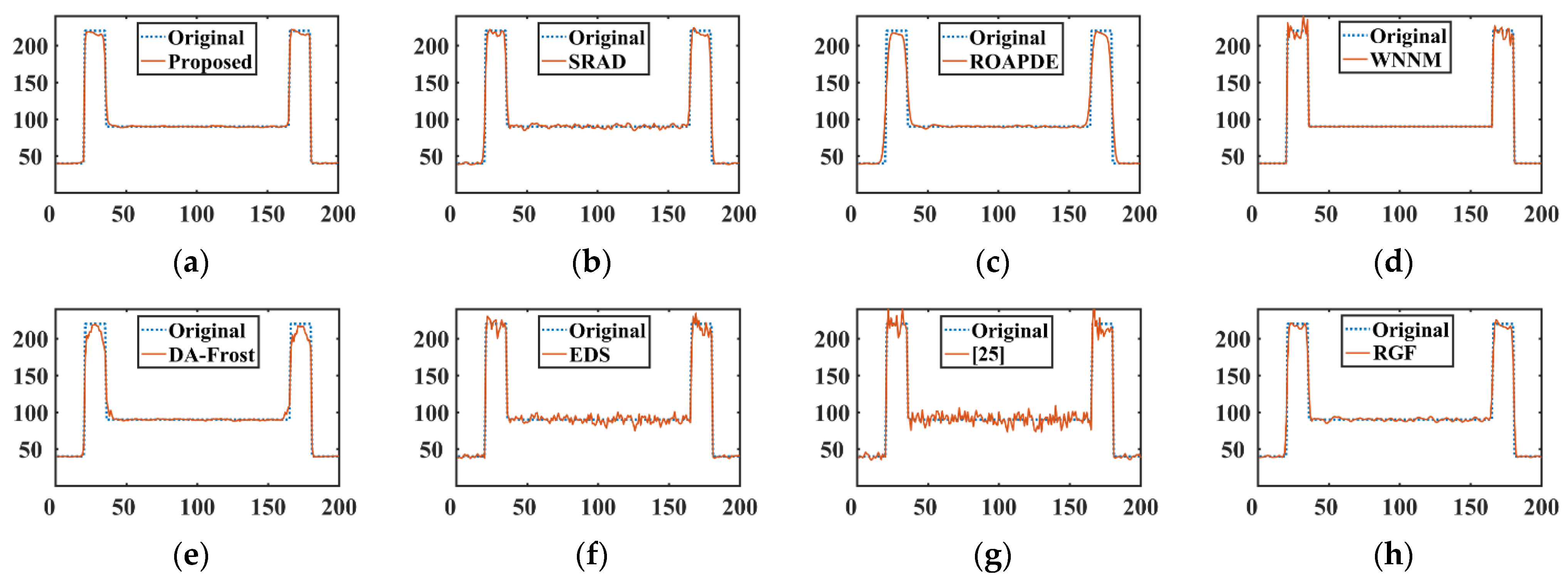
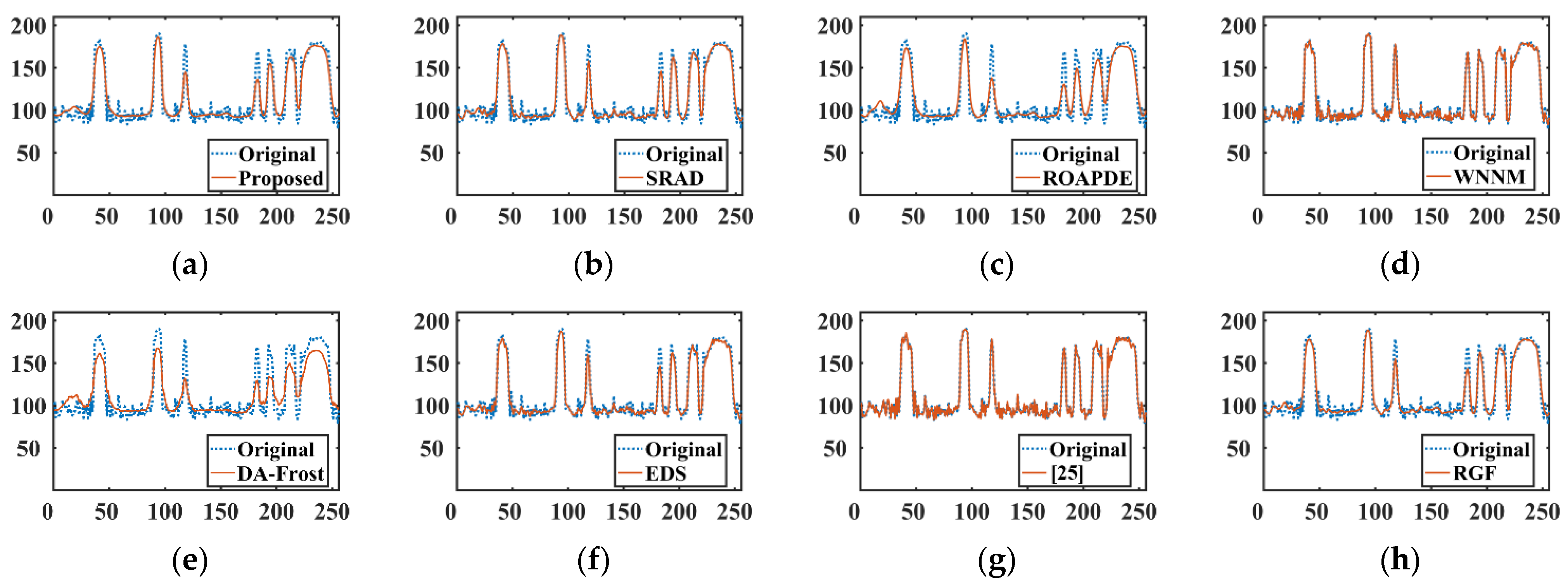
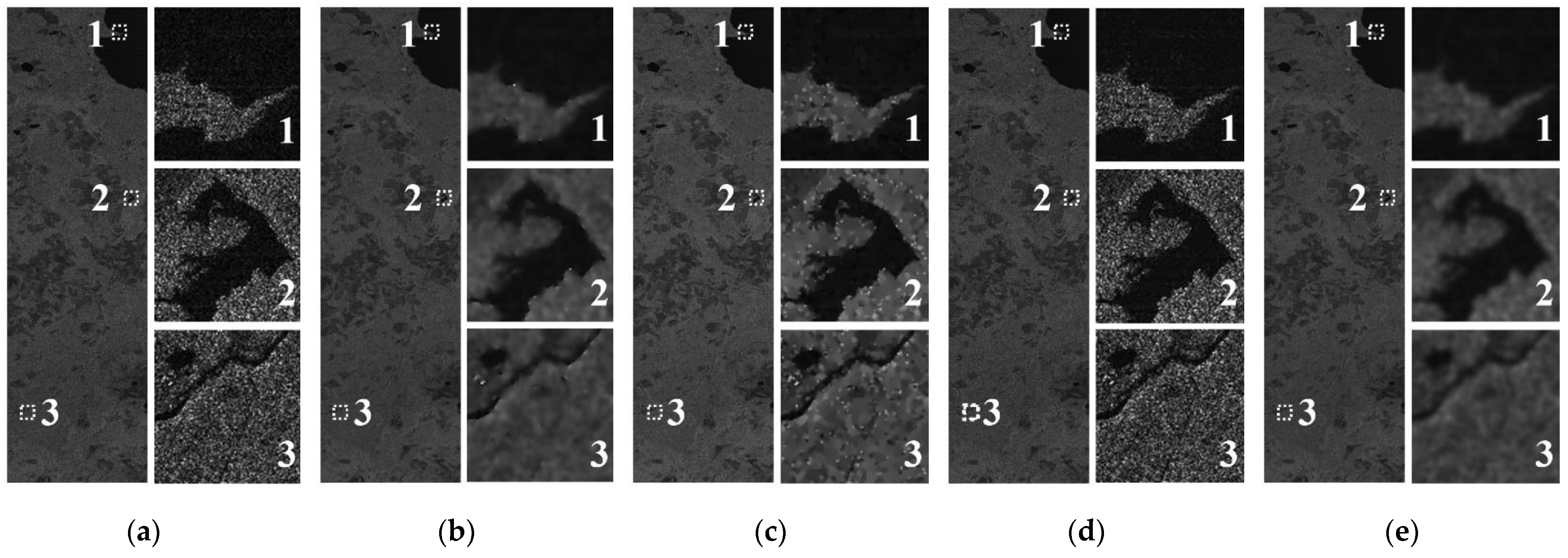
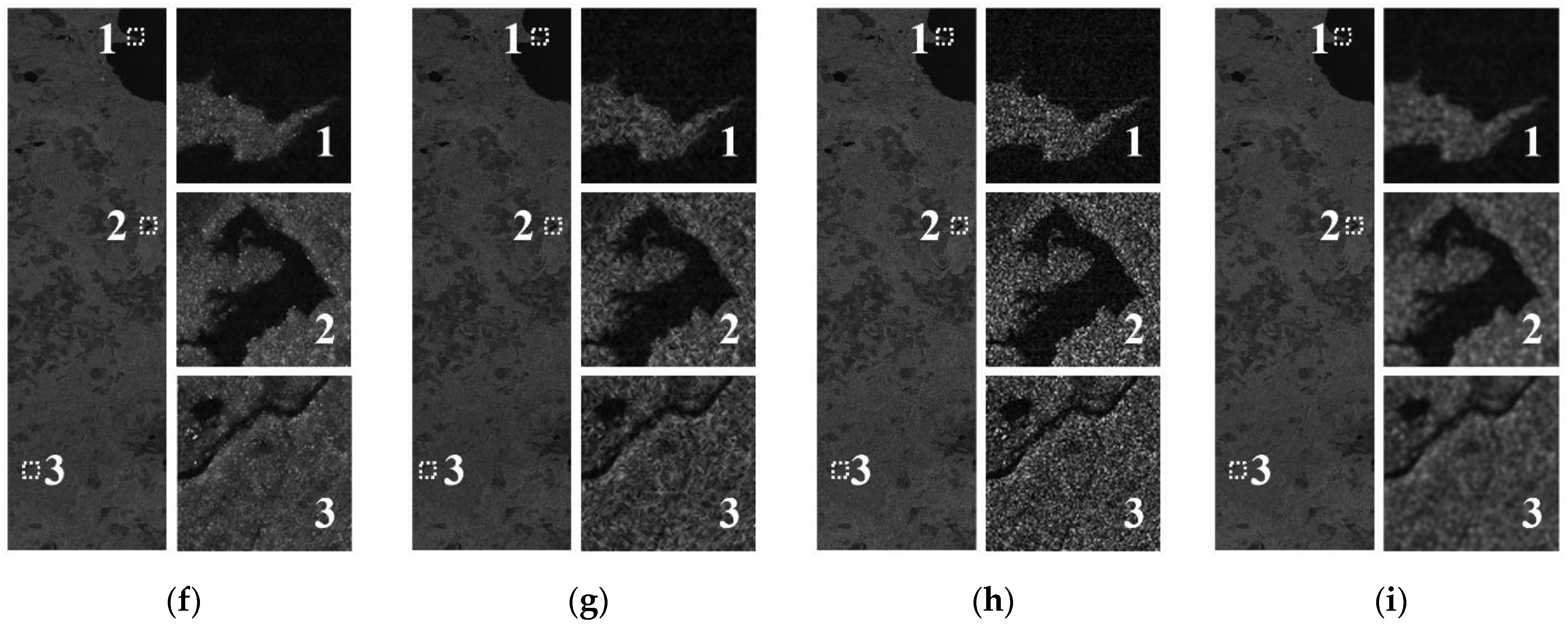
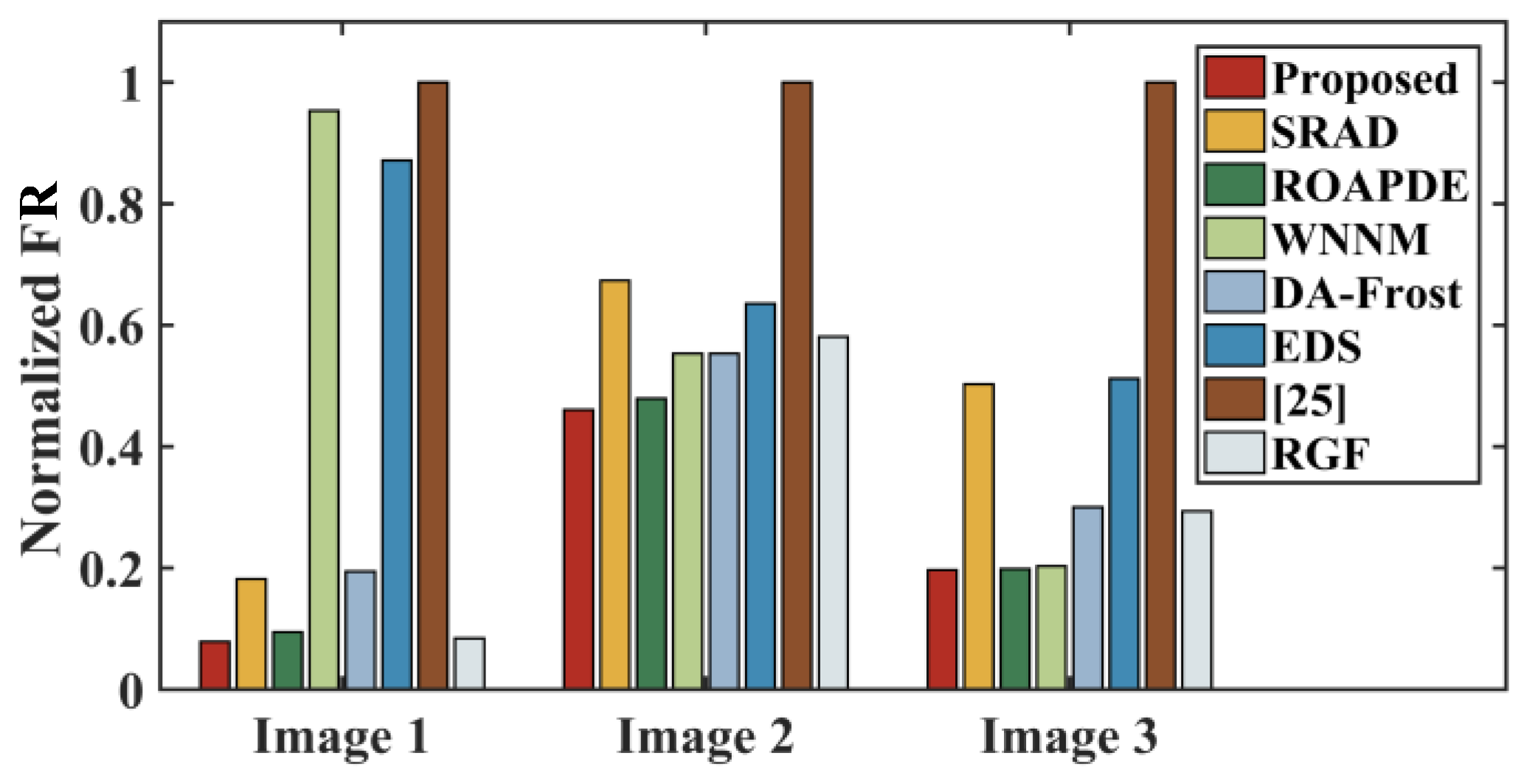
3.2. Speckle Suppression on Synthetic Images
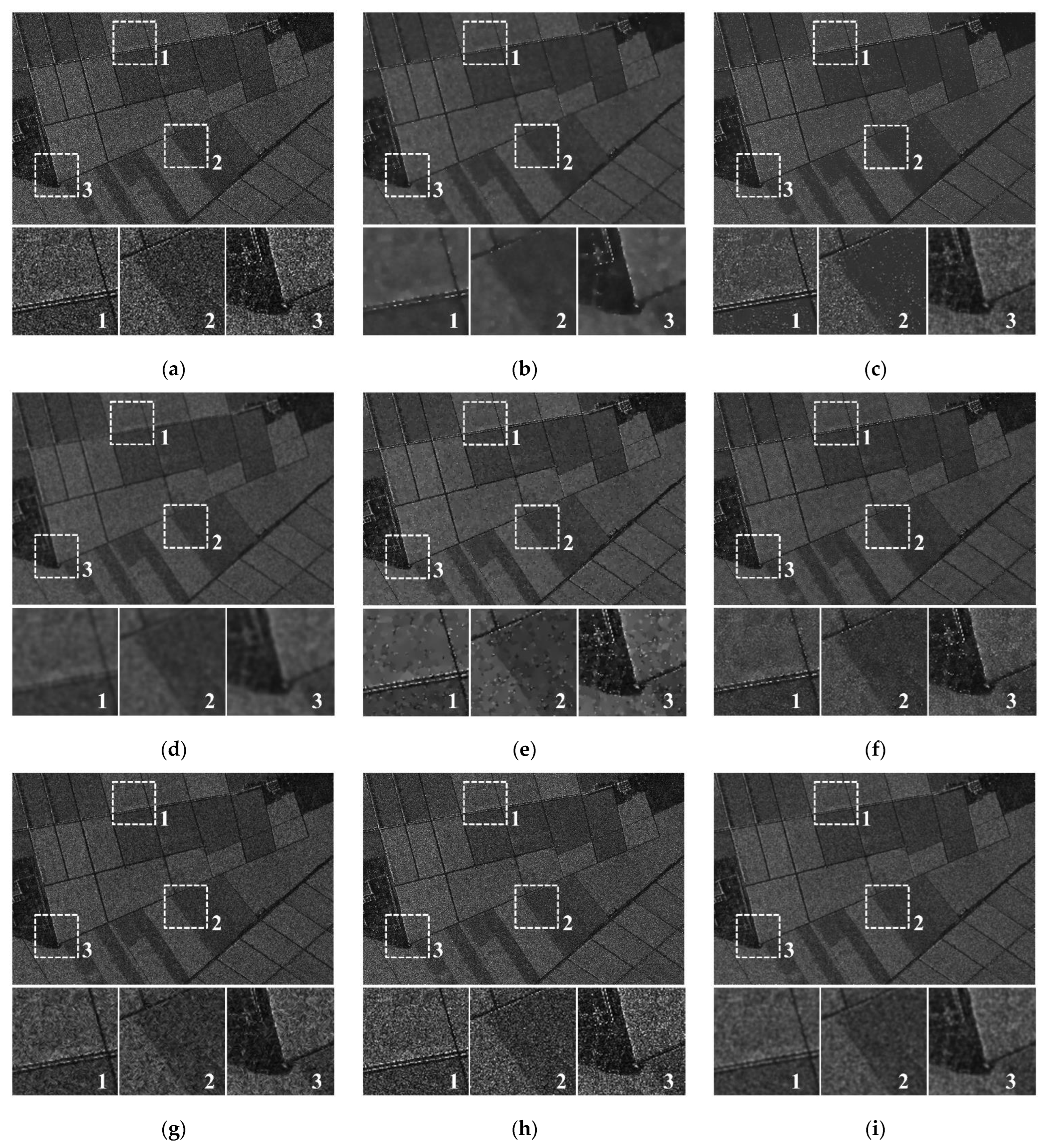
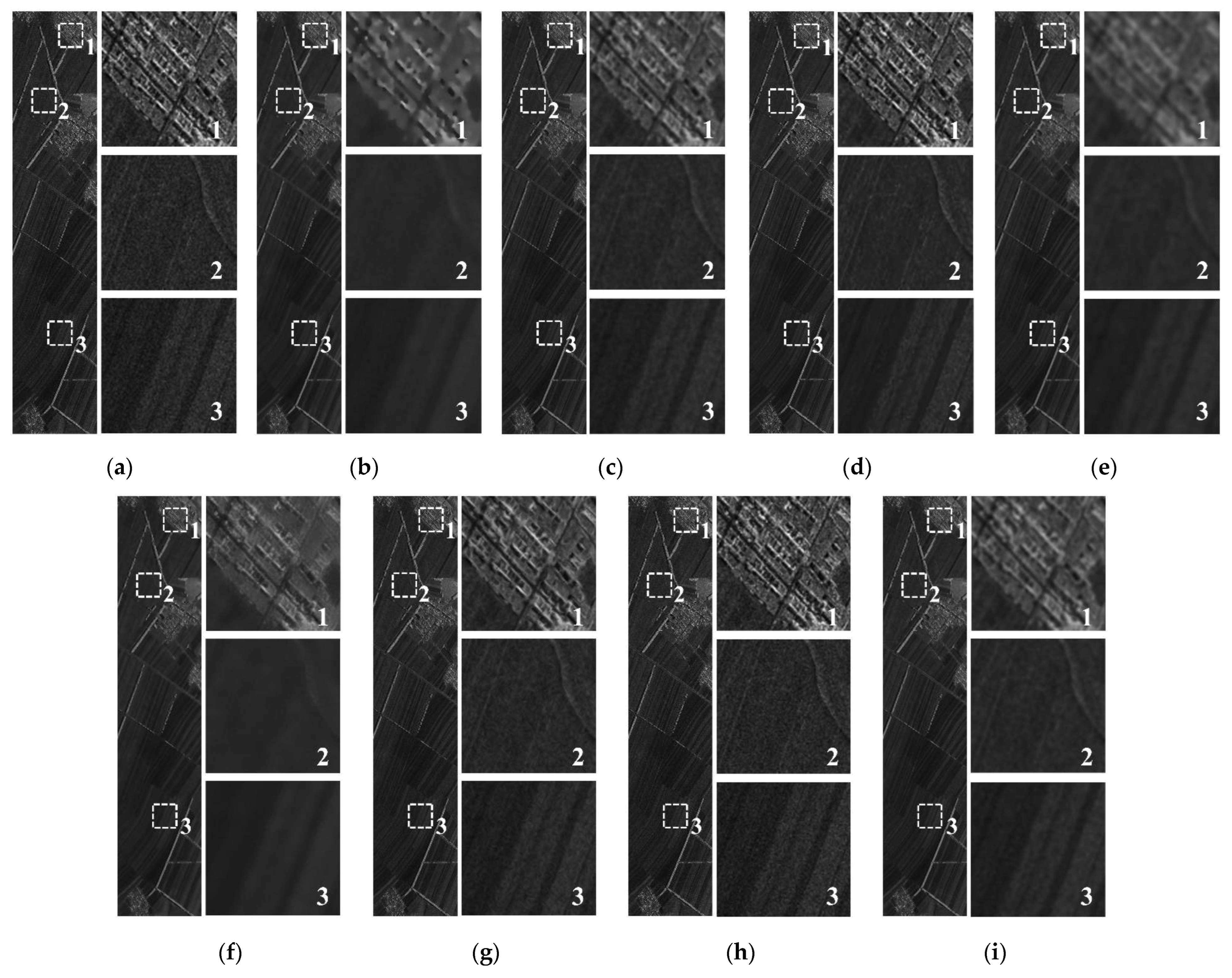
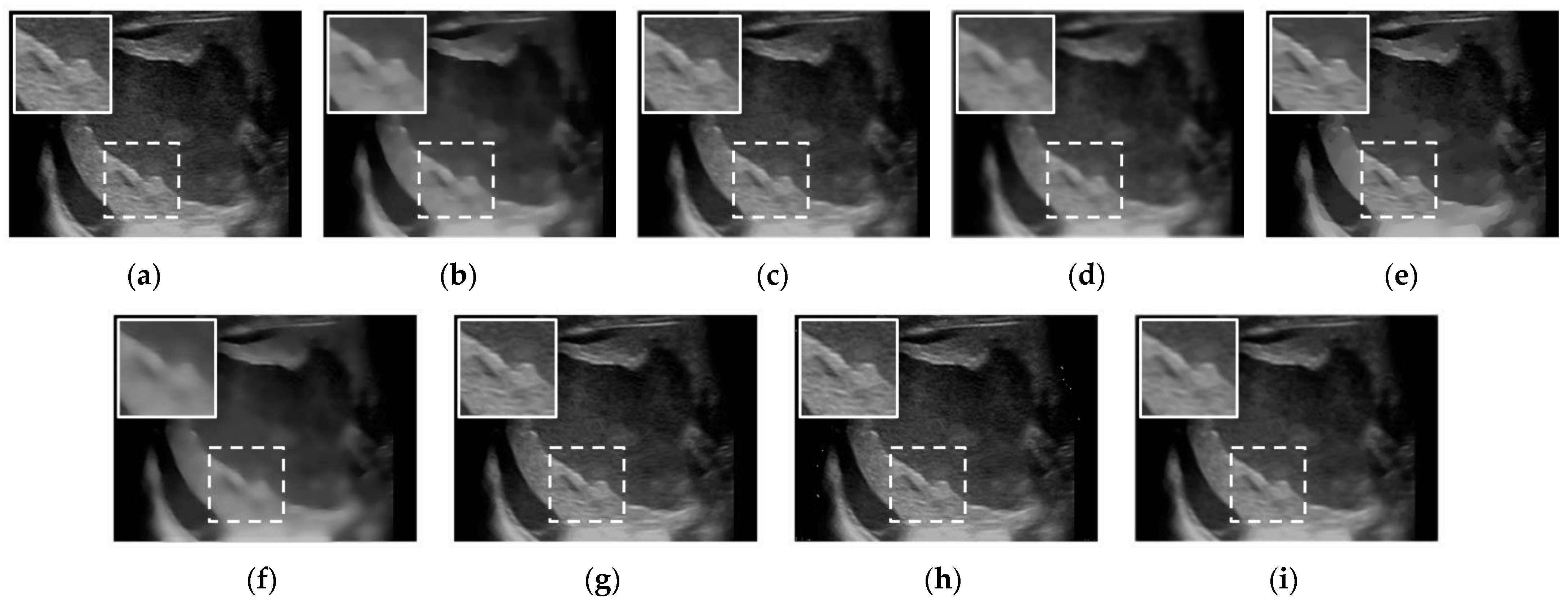
3.3. Speckle Suppression on Natural Images
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lang, F.; Yang, J.; Li, D. Adaptive-Window Polarimetric SAR Image Speckle Filtering Based on a Homogeneity Measurement. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5435–5446. [Google Scholar] [CrossRef]
- Chen, S.W.; Cui, X.C.; Wang, X.S.; Xiao, S.P. Speckle-free SAR image ship detection. IEEE Trans. Image Process. 2021, 30, 5969–5983. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Jiang, X.; Li, Z.; Liu, X.; Zhou, Z. Feature-Enhanced Speckle Reduction via Low-Rank and Space-Angle Continuity for Circular SAR Target Recognition. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7734–7752. [Google Scholar] [CrossRef]
- Jahan, F.; Zhou, J.; Member, S.; Awrangjeb, M.; Member, S. Inverse Coefficient of Variation Feature and Multilevel Fusion Technique for Hyperspectral and LiDAR Data Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 367–381. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.H.; Nguyen, T.H.; Daniel, S.; Guériot, D.; Sintès, C.; Le Caillec, J.M. Coarse-to-Fine Registration of Airborne LiDAR Data and Optical Imagery on Urban Scenes. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3125–3144. [Google Scholar] [CrossRef]
- Jin, S.; Kim, W.; Jeong, J. Fine directional de-interlacing algorithm using modified Sobel operation. IEEE Trans. Consum. Electron. 2008, 54, 587–862. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bousquet, P. A Statistical and Geometrical Edge Detector for SAR Images. IEEE Trans. Geosci. Remote Sens. 1988, 26, 764–773. [Google Scholar] [CrossRef]
- Fu, X.; You, H.; Fu, K. A statistical approach to detect edges in SAR images based on square successive difference of averages. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1094–1098. [Google Scholar] [CrossRef]
- Ma, X.; Shen, H.; Zhang, L.; Yang, J.; Zhang, H. Adaptive Anisotropic Diffusion Method for Polarimetric SAR Speckle Filtering. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1041–1050. [Google Scholar] [CrossRef]
- Randhawa, S.K.; Sunkaria, R.K.; Puthooran, E. Despeckling of ultrasound images using novel adaptive wavelet thresholding function. Multidimens. Syst. Signal Processing 2019, 30, 1545–1561. [Google Scholar] [CrossRef]
- Gupta, D.; Anand, R.S.; Tyagi, B. Speckle filtering of ultrasound images using a modified non-linear diffusion model in non-subsampled shearlet domain. IET Image Process. 2015, 9, 107–117. [Google Scholar] [CrossRef]
- Woods, J.W.; Biemond, J. Comments on “A Model for Radar Images and Its Application to Adaptive Digital Filtering of Multiplicative Noise”. IEEE Trans. Pattern Anal. Mach. Intell. 1984, PAMI-6, 658–659. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, L.; Lin, G.; Cheng, Y. An Integrated De-speckling Approach for Medical Ultrasound Images Based on Wavelet and Trilateral Filter. Circuits Syst. Signal Processing 2016, 36, 297–314. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Z.; Chen, Y.; Liu, S.; Song, Y. Frost Filtering Algorithm of SAR Images with Adaptive Windowing and Adaptive Tuning Factor. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1097–1101. [Google Scholar] [CrossRef]
- Lee, J.-S. Speckle Suppression And Analysis For Synthetic Aperture Radar Images. Opt. Eng. 1986, 25, 255636. [Google Scholar] [CrossRef]
- Chen, Q.; Montesinos, P.; Sen, Q.; Xia, D.S. Ramp preserving Perona—Malik model. Signal Processing 2010, 90, 1963–1975. [Google Scholar] [CrossRef]
- Yu, Y.; Acton, S.T. Speckle reducing anisotropic diffusion. IEEE Trans. Image Processing 2002, 11, 1260–1270. [Google Scholar] [CrossRef] [Green Version]
- Aja-Fernández, S.; Alberola-López, C. On the estimation of the coefficient of variation for anisotropic diffusion speckle filtering. IEEE Trans. Image Processing 2006, 15, 2694–2701. [Google Scholar] [CrossRef]
- May, V.; Keller, Y.; Sharon, N.; Shkolnisky, Y. An Algorithm for Improving Non-Local Means Operators via Low-Rank Approximation. IEEE Trans. Image Processing 2016, 25, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Deledalle, C.A.; Denis, L.; Tupin, F. Iterative weighted maximum likelihood denoising with probabilistic patch-based weights. IEEE Trans. Image Processing 2009, 18, 2661–2672. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Lv, Y.; Liu, Q.; Qin, B. Detail-Preserving Image Denoising via Adaptive Clustering and Progressive PCA Thresholding. IEEE Access 2018, 6, 6303–6315. [Google Scholar] [CrossRef]
- Karnaukhov, V.N.; Mozerov, M.G. Fast Non-Local Mean Filter Algorithm Based on Recursive Calculation of Similarity Weights. J. Commun. Technol. Electron. 2018, 63, 1475–1477. [Google Scholar] [CrossRef]
- Gómez Flores, W.; Pereira, W.C.d.A.; Infantosi, A.F.C. Breast Ultrasound Despeckling Using Anisotropic Diffusion Guided by Texture Descriptors. Ultrasound Med. Biol. 2014, 40, 2609–2621. [Google Scholar] [CrossRef] [PubMed]
- Mei, K.; Hu, B.; Fei, B.; Qin, B. Phase Asymmetry Ultrasound Despeckling With Fractional Anisotropic Diffusion and Total Variation. IEEE Trans. Image Processing 2020, 29, 2845–2859. [Google Scholar] [CrossRef] [PubMed]
- Abdullah Yahya, A.; Tan, J.; Su, B.; Liu, K.; Hadi, A.N. Image edge detection method based on anisotropic diffusion and total variation models. J. Eng. 2019, 2019, 455–460. [Google Scholar] [CrossRef]
- Mastriani, M.; Giraldez, A.E. Enhanced Directional Smoothing Algorithm for Edge-Preserving Smoothing of Synthetic-Aperture Radar Images. Meas. Sci. Rev. 2014, 4, 1–11. [Google Scholar]
- Jing, W.; Jin, T.; Xiang, D. Edge-Aware Superpixel Generation for SAR Imagery With One Iteration Merging. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1600–1604. [Google Scholar] [CrossRef]
- Gu, S.; Zhang, L.; Zuo, W.; Feng, X. Weighted nuclear norm minimization with application to image denoising. Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit. 2014, 2862–2869. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Xu, L.; Clausi, D.A.; Wong, A. A Bayesian Joint Decorrelation and Despeckling of SAR Imagery. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1393–1397. [Google Scholar] [CrossRef]
- Di Martino, G.; Iodice, A.; Riccio, D.; Ruello, G. Equivalent number of scatterers for SAR speckle modeling. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2555–2564. [Google Scholar] [CrossRef]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Ma, J.; Plonka, G. Combined curvelet shrinkage and nonlinear anisotropic diffusion. IEEE Trans. Image Processing 2007, 16, 2198–2206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Estimation of the equivalent number of looks in polarimetric sar imagery. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Boston, MA, USA, 7–11 July 2008; Volume 4, pp. 487–490. [Google Scholar]
- Karimi, N.; Taban, M.R. A convex variational method for super resolution of SAR image with speckle noise. Signal Processing Image Commun. 2021, 90, 116061. [Google Scholar] [CrossRef]
- Huang, Y.; Xia, W.; Lu, Z.; Liu, Y.; Chen, H.; Zhou, J.; Fang, L.; Zhang, Y. Noise-Powered Disentangled Representation for Unsupervised Speckle Reduction of Optical Coherence Tomography Images. IEEE Trans. Med. Imaging 2021, 40, 2600–2614. [Google Scholar] [CrossRef]
- Gomez, L.; Ospina, R.; Frery, A.C. Unassisted quantitative evaluation of despeckling filters. Remote Sens. 2017, 9, 389. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Formula | Parameters |
|---|---|---|
| Equivalent number of looks (ENL) [33] | μ-Intensity average of image σ-Intensity variance of image | |
| Peak signal-to-noise ratio (PSNR) [34] | Max-The maximum intensity of the image MSE- Mean square error [34] | |
| Structure similarity index measure (SSIM) [35] | C1, C2-Two constants to avoid the denominator being zero. We set C1 = 6.5025 and C2 = 58.5225 in this paper. |
| Image | Index | QAD | SRAD | ROAPDE | WNNM | DA-Frost | EDS | Method in [25] | RGF |
|---|---|---|---|---|---|---|---|---|---|
| 1 | ENL | 1148.208 | 188.8266 | 788.4655 | 2456.825 | 732.6817 | 47.5501 | 19.5870 | 265.1043 |
| PSNR | 28.3762 | 24.4482 | 21.7142 | 25.3275 | 24.3889 | 22.5461 | 19.3740 | 24.3943 | |
| SSIM | 0.9920 | 0.9794 | 0.9593 | 0.9789 | 0.9791 | 0.9698 | 0.9392 | 0.9792 | |
| 2 | ENL | 173.7292 | 72.0986 | 124.7040 | 170.5701 | 187.0147 | 35.7569 | 18.8991 | 79.6633 |
| PSNR | 26.9975 | 25.5037 | 22.6524 | 26.9237 | 25.9660 | 23.7714 | 20.7938 | 25.3325 | |
| SSIM | 0.9832 | 0.9761 | 0.9519 | 0.9834 | 0.9786 | 0.9662 | 0.9362 | 0.9751 | |
| 3 | ENL | 127.1609 | 77.2870 | 123.3472 | 81.7275 | 160.5184 | 45.4357 | 20.2846 | 86.8317 |
| PSNR | 25.4831 | 26.0161 | 23.6909 | 25.8179 | 22.2074 | 23.1071 | 19.9500 | 25.9086 | |
| SSIM | 0.9748 | 0.9602 | 0.9447 | 0.9628 | 0.9181 | 0.9447 | 0.8970 | 0.9693 |
| Image | Region | Original | QAD | SRAD | ROAPDE | WNNM | DA-Frost | EDS | Method in [25] | RGF |
|---|---|---|---|---|---|---|---|---|---|---|
| X-band | Region 1 | 3.7552 | 78.9749 | 28.6375 | 77.1546 | 6.3818 | 18.7063 | 9.8756 | 3.7607 | 33.3181 |
| Region 2 | 3.1325 | 30.8681 | 17.3108 | 30.3656 | 8.2419 | 11.6715 | 7.6006 | 3.1375 | 19.3260 | |
| Region 3 | 1.9163 | 7.1138 | 6.3428 | 8.9477 | 3.0102 | 4.1101 | 3.6157 | 1.9189 | 6.7453 | |
| S-band | Region 1 | 3.4429 | 8.4866 | 7.3068 | 12.9362 | 3.5752 | 9.2775 | 4.7948 | 3.4463 | 7.9731 |
| Region 2 | 14.0738 | 70.1042 | 29.4621 | 44.3013 | 24.6344 | 66.3731 | 22.2277 | 14.1087 | 31.4164 | |
| Region 3 | 14.5170 | 39.8835 | 27.0439 | 33.2399 | 24.8324 | 39.2225 | 21.5914 | 14.5341 | 28.2677 | |
| C-band | Region 1 | 0.8809 | 1.7718 | 1.6442 | 1.8236 | 0.9461 | 1.5046 | 1.4087 | 0.8819 | 1.6997 |
| Region 2 | 1.4821 | 4.2169 | 3.8279 | 4.2096 | 1.5261 | 3.1057 | 2.6813 | 1.4843 | 4.0827 | |
| Region 3 | 2.2523 | 13.2380 | 10.4906 | 21.9790 | 2.3085 | 6.8664 | 5.0904 | 2.2554 | 12.5298 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, Z.; Yu, W.; Luo, Y.; Yu, Z. A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model. Remote Sens. 2022, 14, 796. https://doi.org/10.3390/rs14030796
Li J, Wang Z, Yu W, Luo Y, Yu Z. A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model. Remote Sensing. 2022; 14(3):796. https://doi.org/10.3390/rs14030796
Chicago/Turabian StyleLi, Jiamu, Zijian Wang, Wenbo Yu, Yunhua Luo, and Zhongjun Yu. 2022. "A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model" Remote Sensing 14, no. 3: 796. https://doi.org/10.3390/rs14030796
APA StyleLi, J., Wang, Z., Yu, W., Luo, Y., & Yu, Z. (2022). A Novel Speckle Suppression Method with Quantitative Combination of Total Variation and Anisotropic Diffusion PDE Model. Remote Sensing, 14(3), 796. https://doi.org/10.3390/rs14030796