
Feature-Based Approach to Change Detection of Small Objects from High-Resolution Satellite Images



Abstract
:1. Introduction
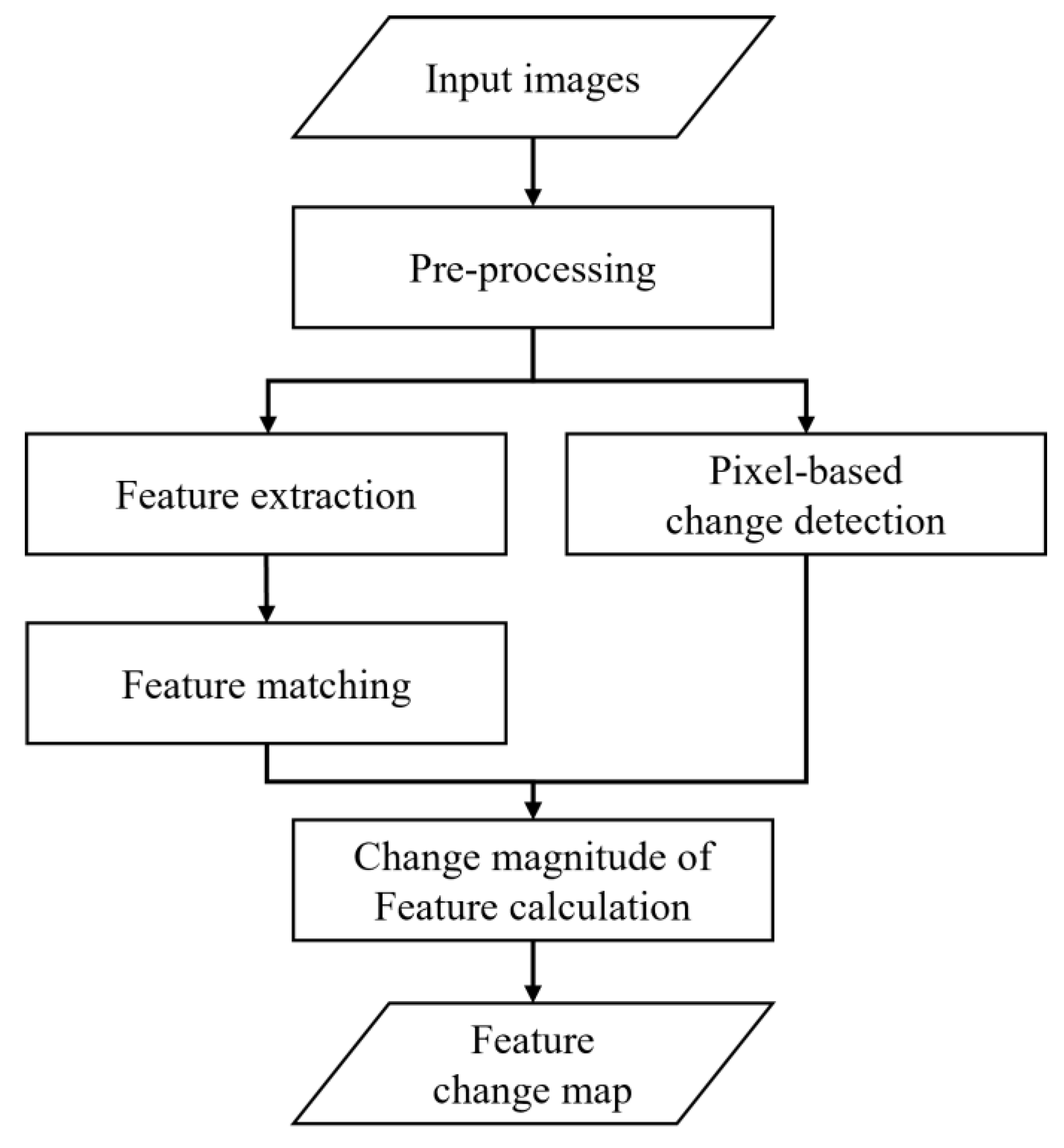
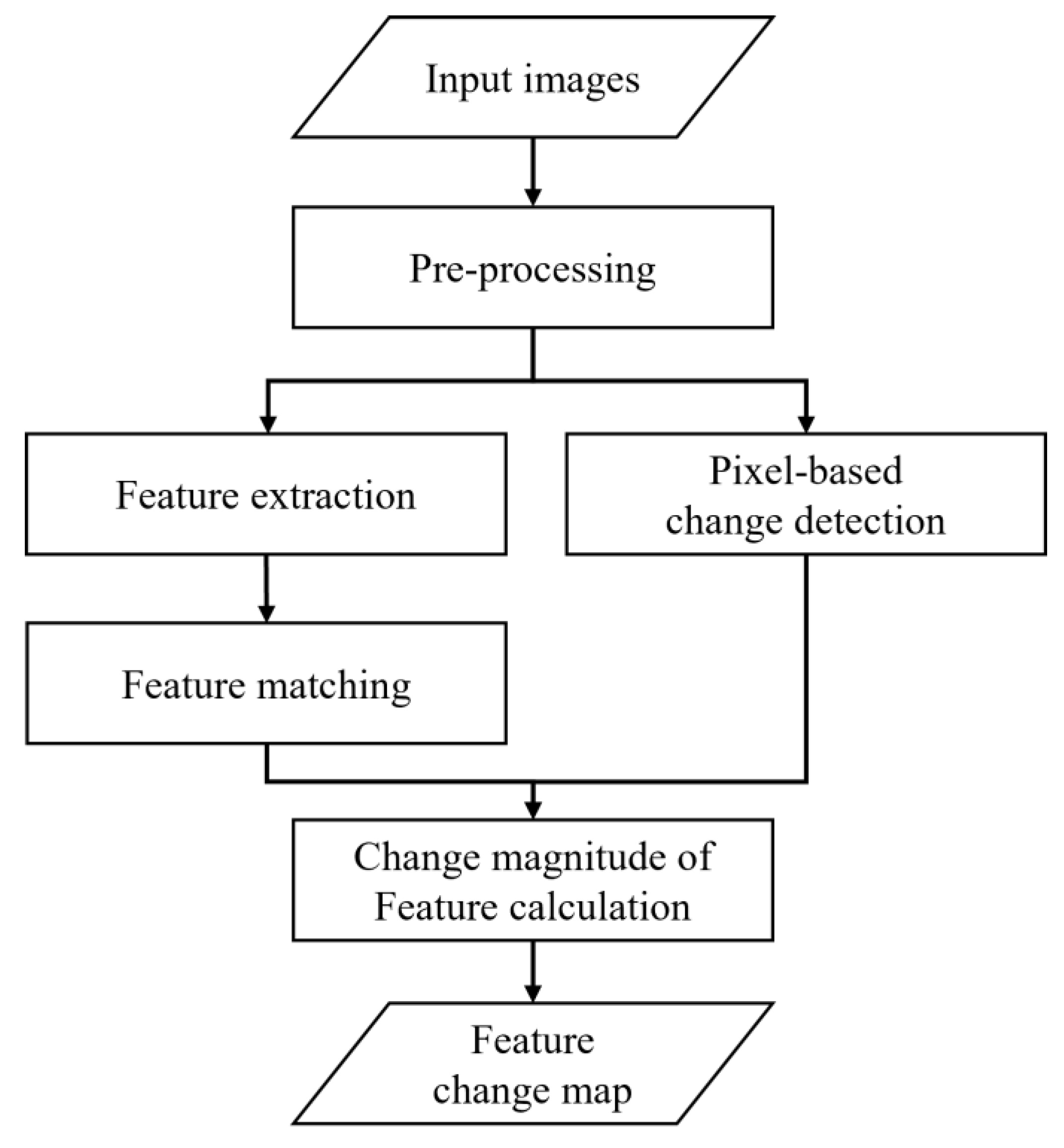
2. Feature Point-Based Change Detection Method
2.1. Pre-Processing
2.2. Feature Extraction
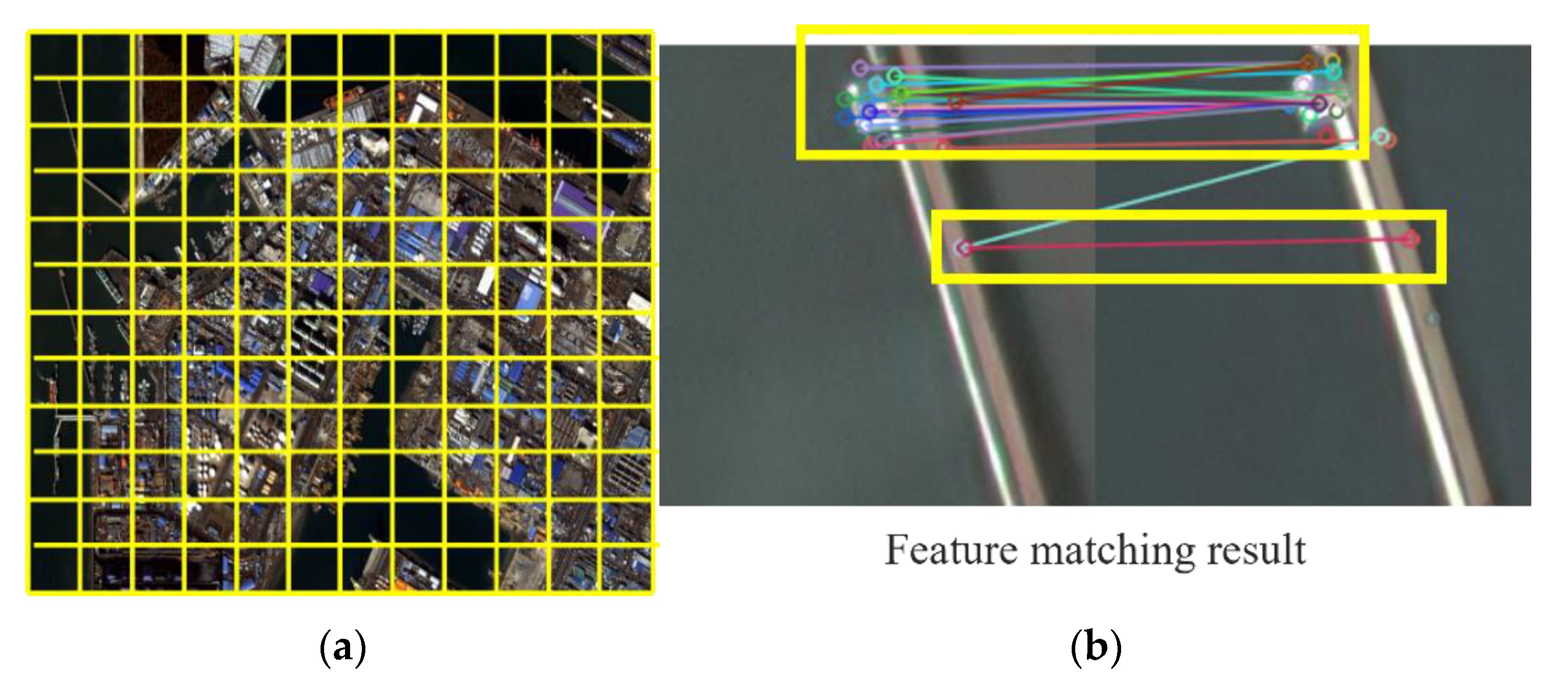
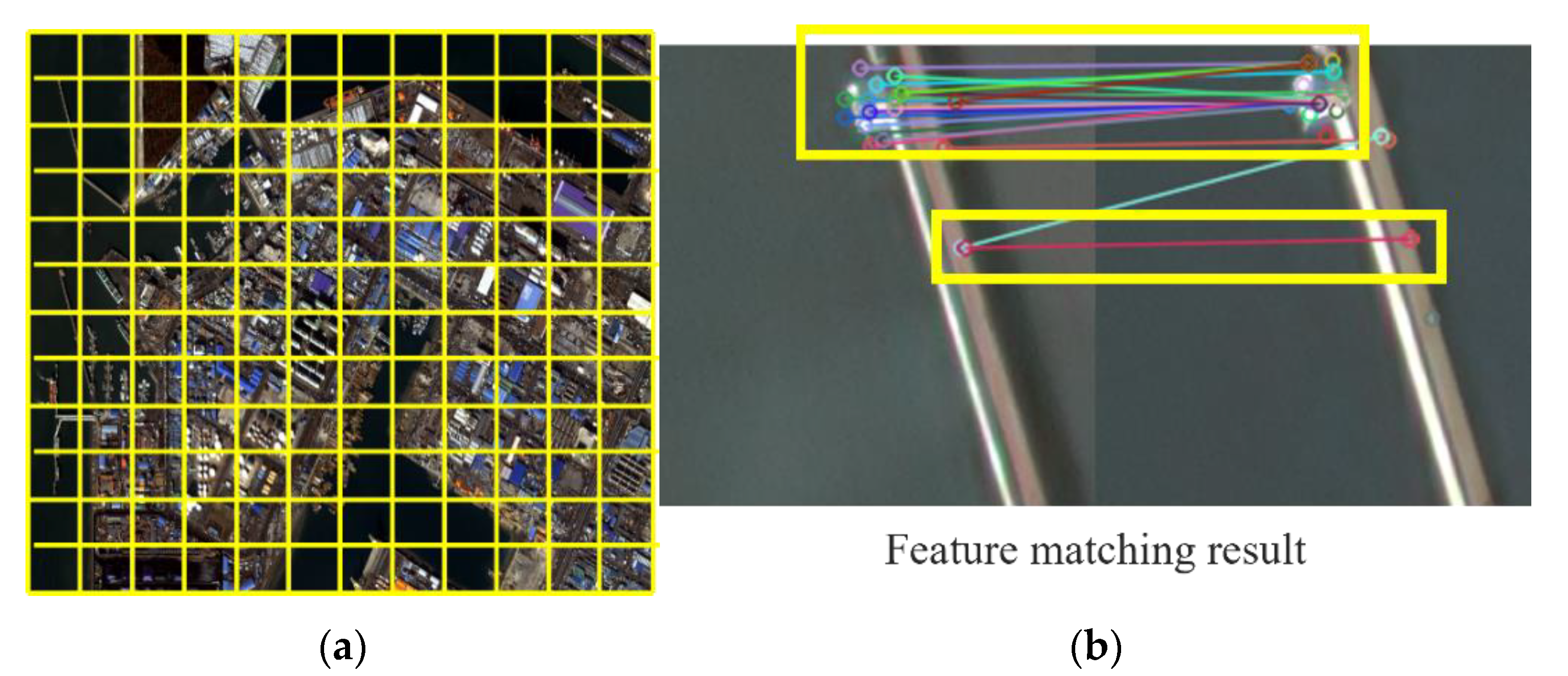
2.3. Feature Matching
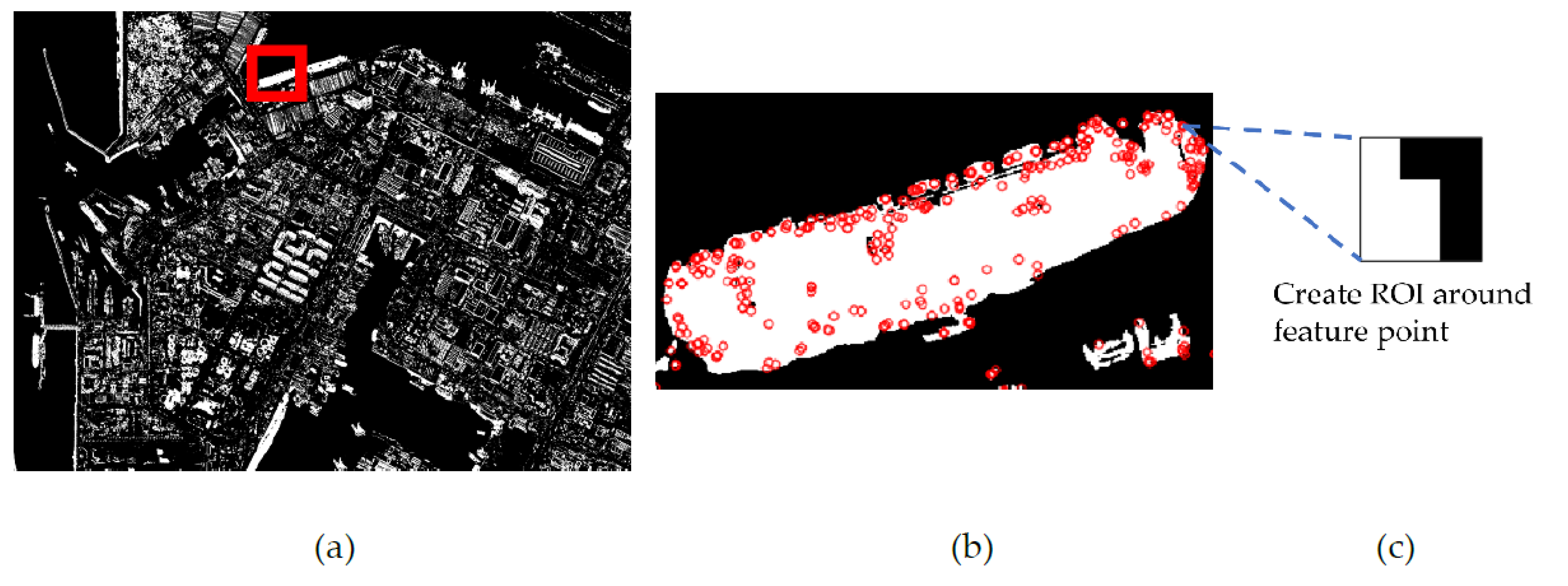
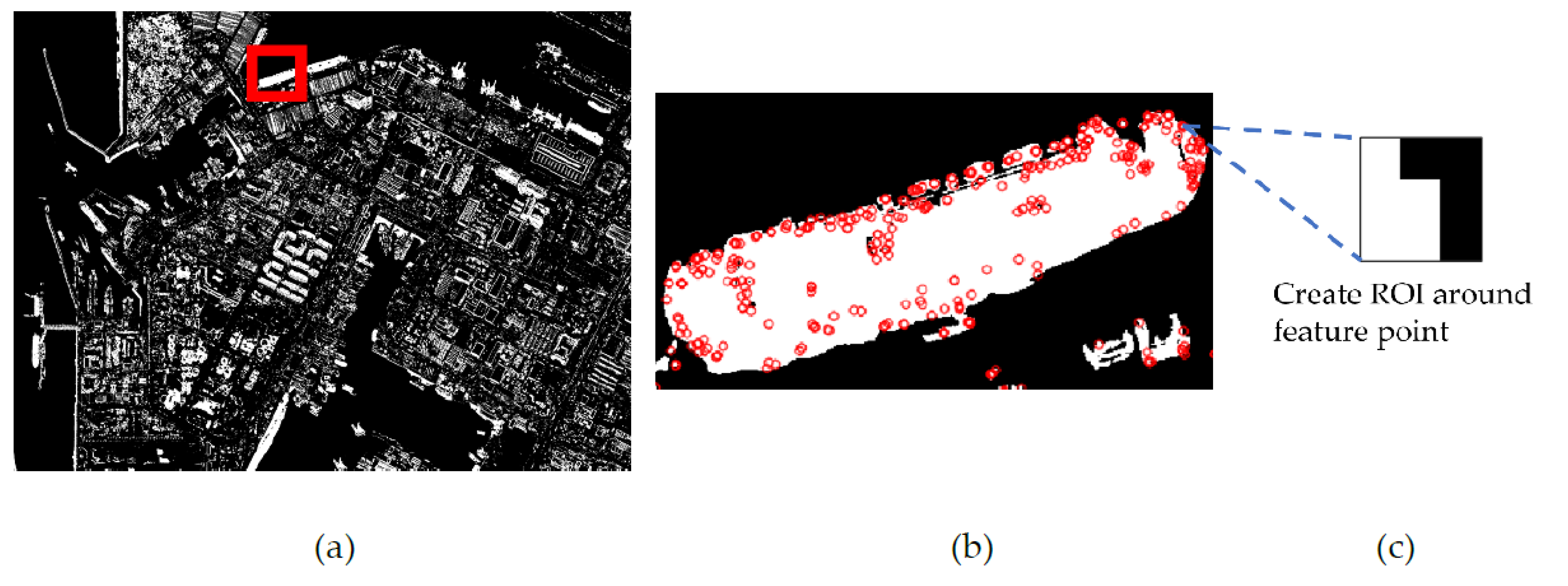
2.4. Pixel-Based Change Analysis
2.5. Feature-Based Change Analysis
2.6. Performance Analysis
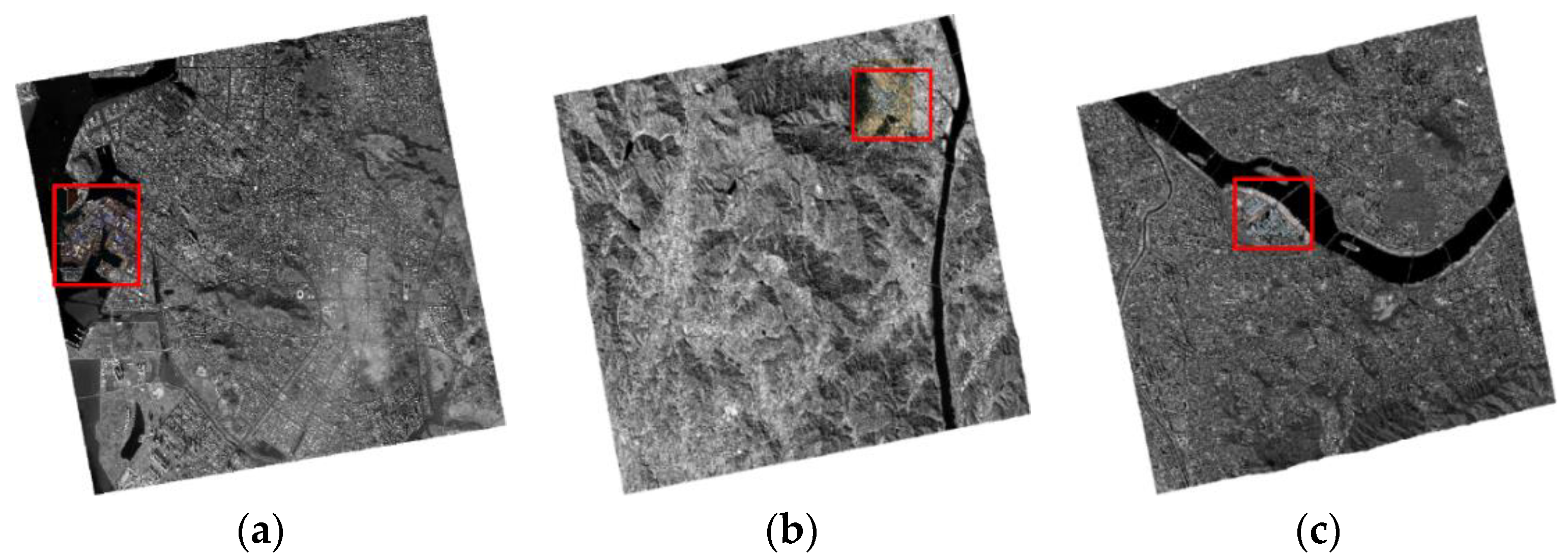
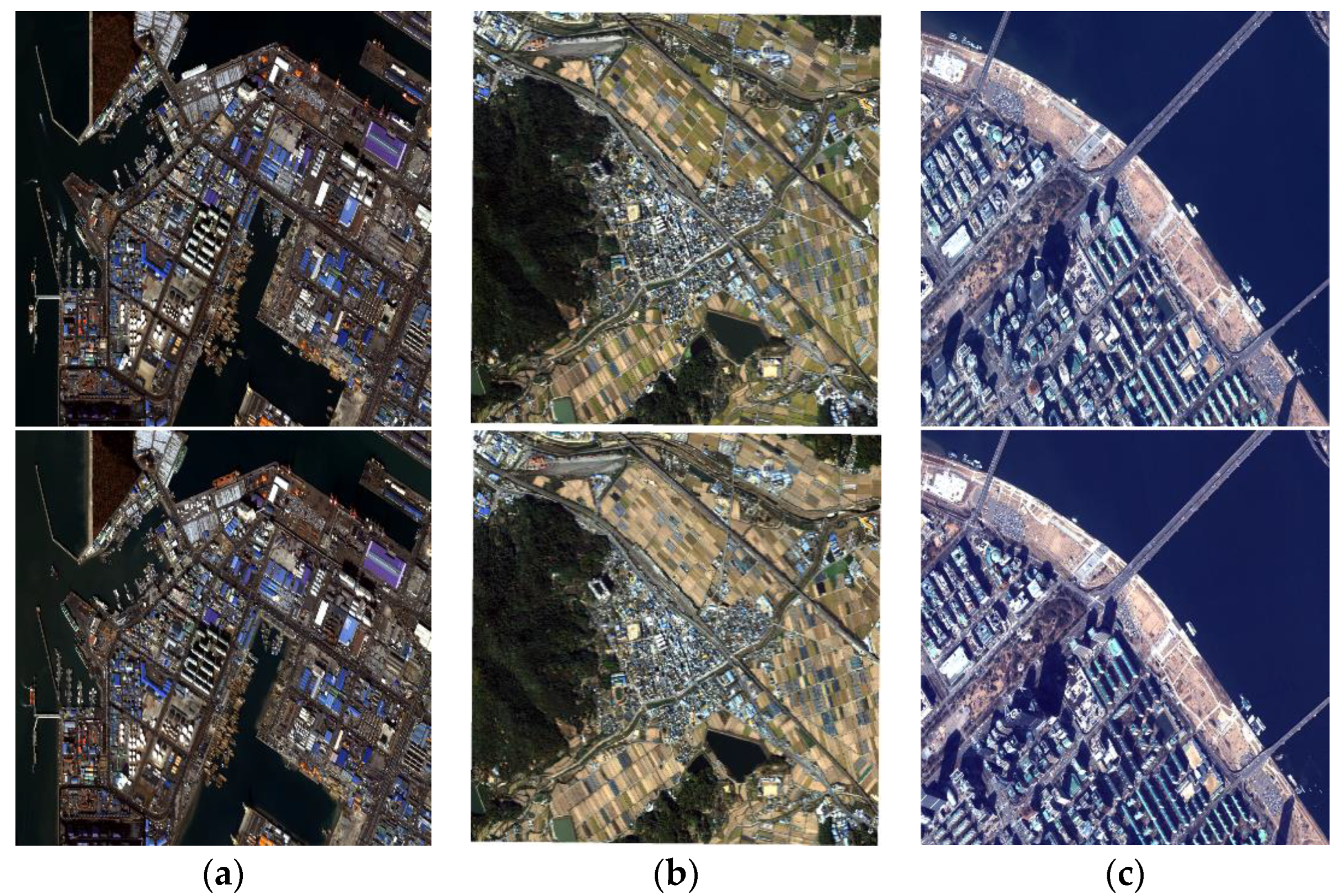
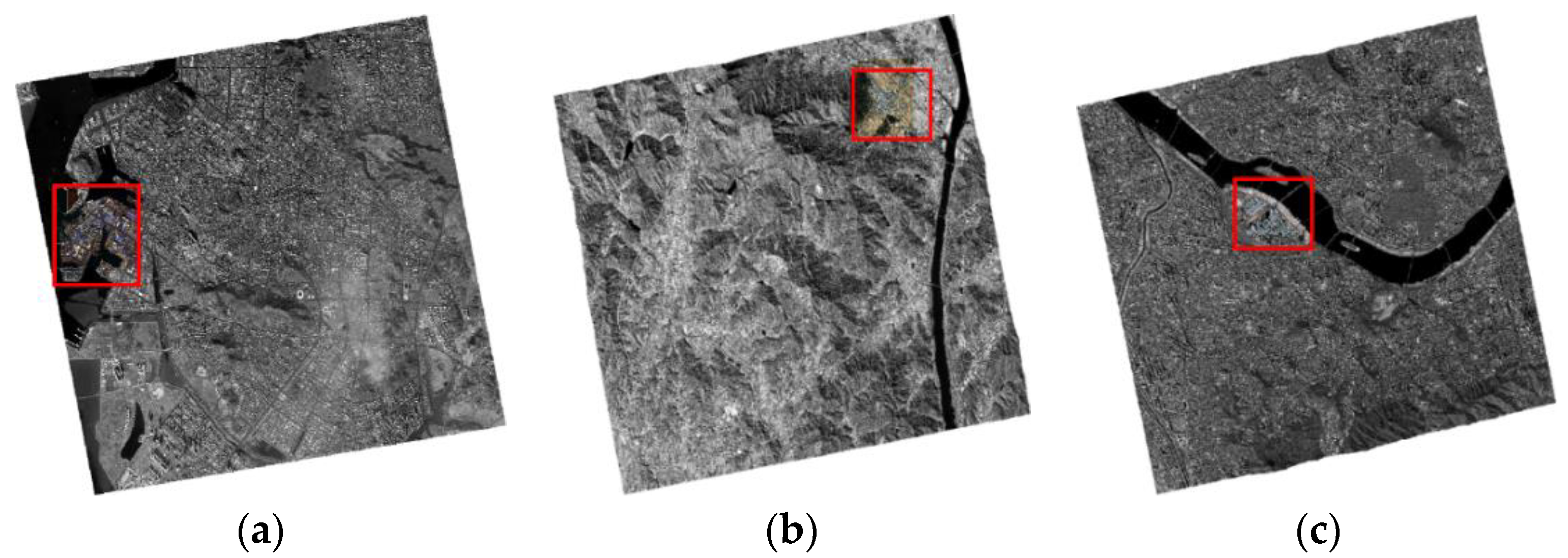
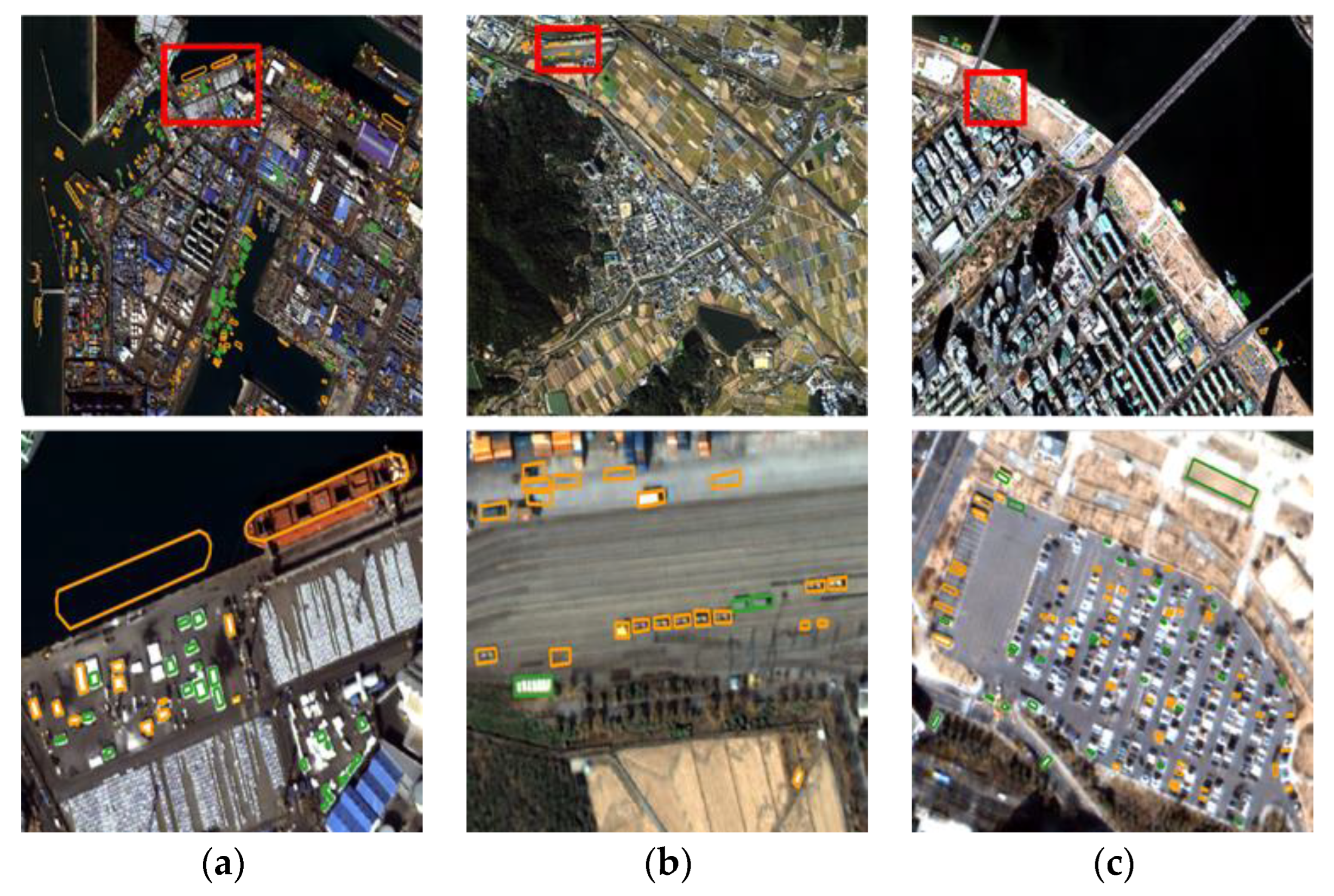
3. Dataset and Study Area
4. Results and Discussions
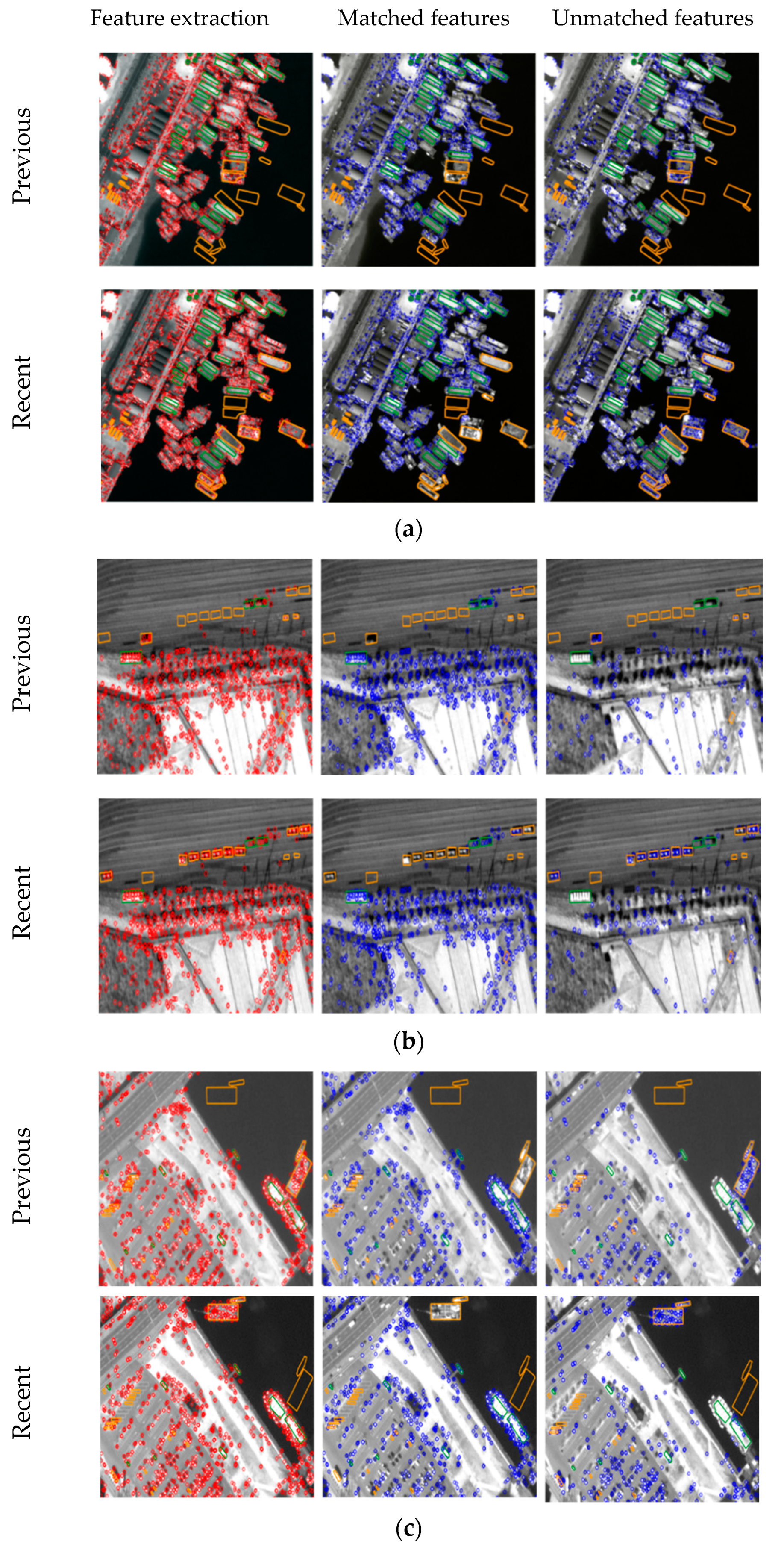
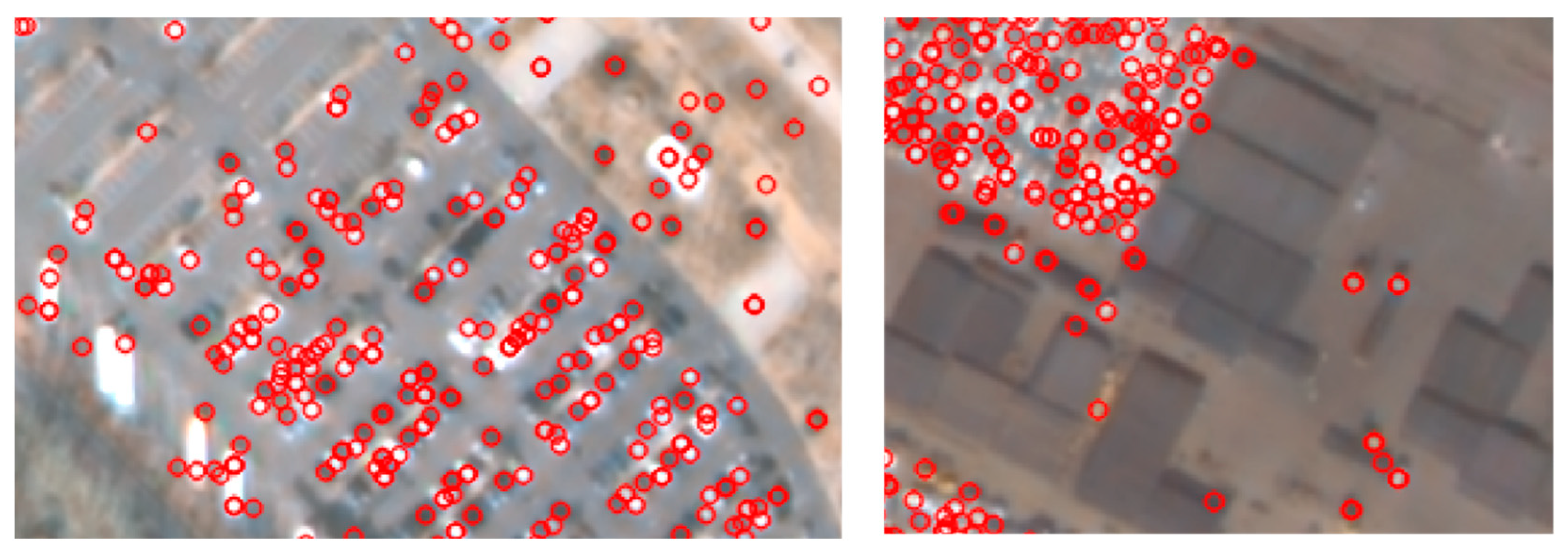
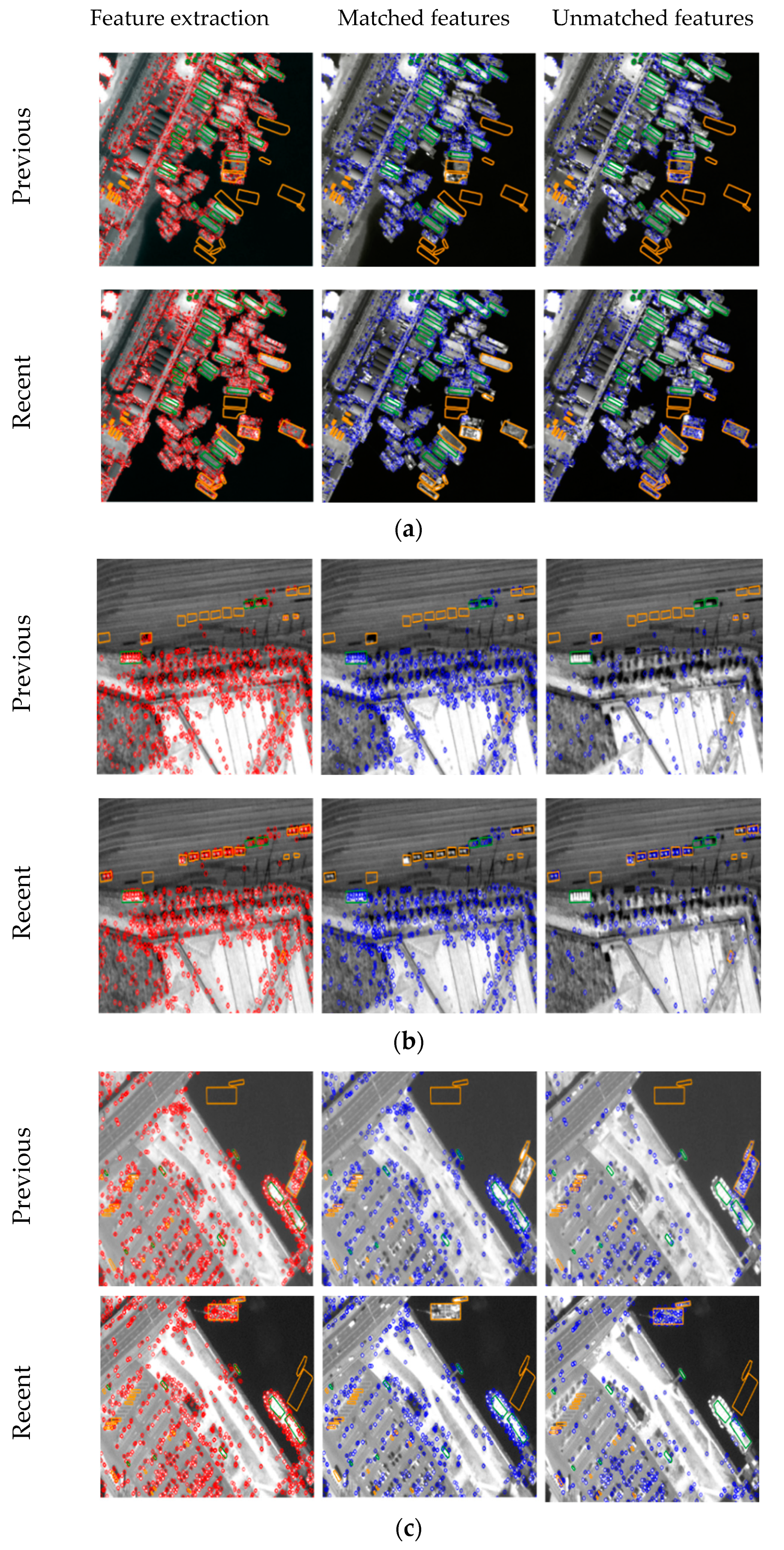
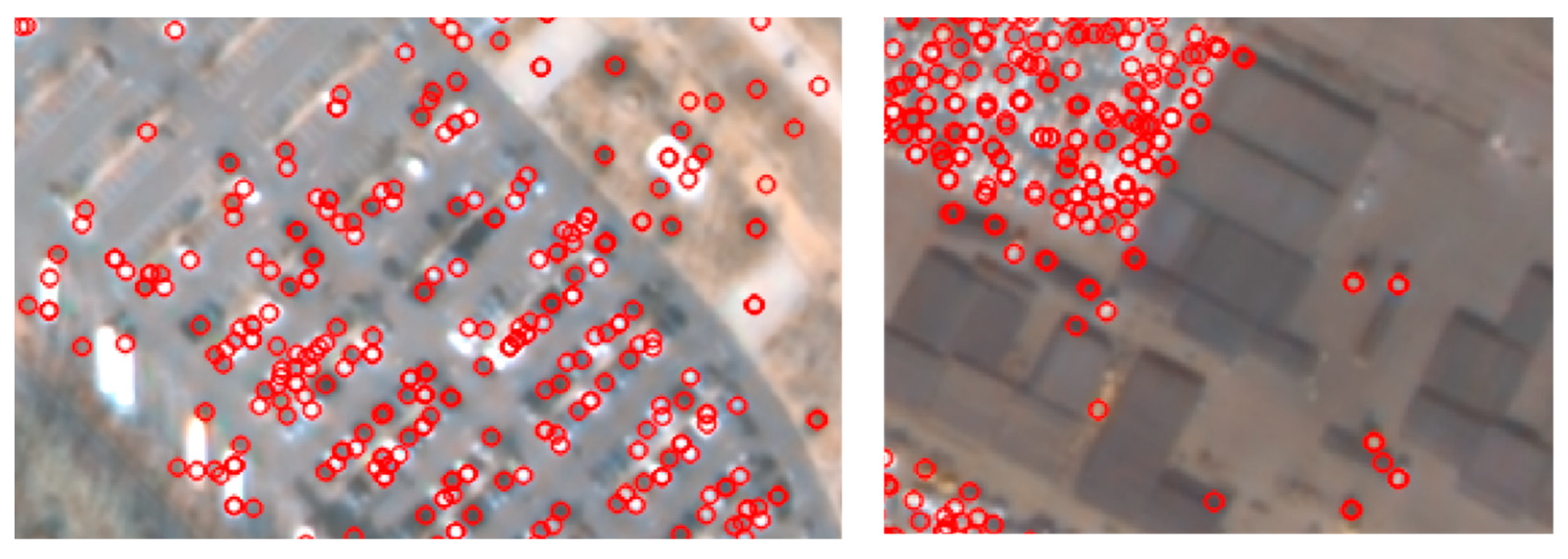
4.1. Feature Extraction Results
4.2. Feature Matching Results
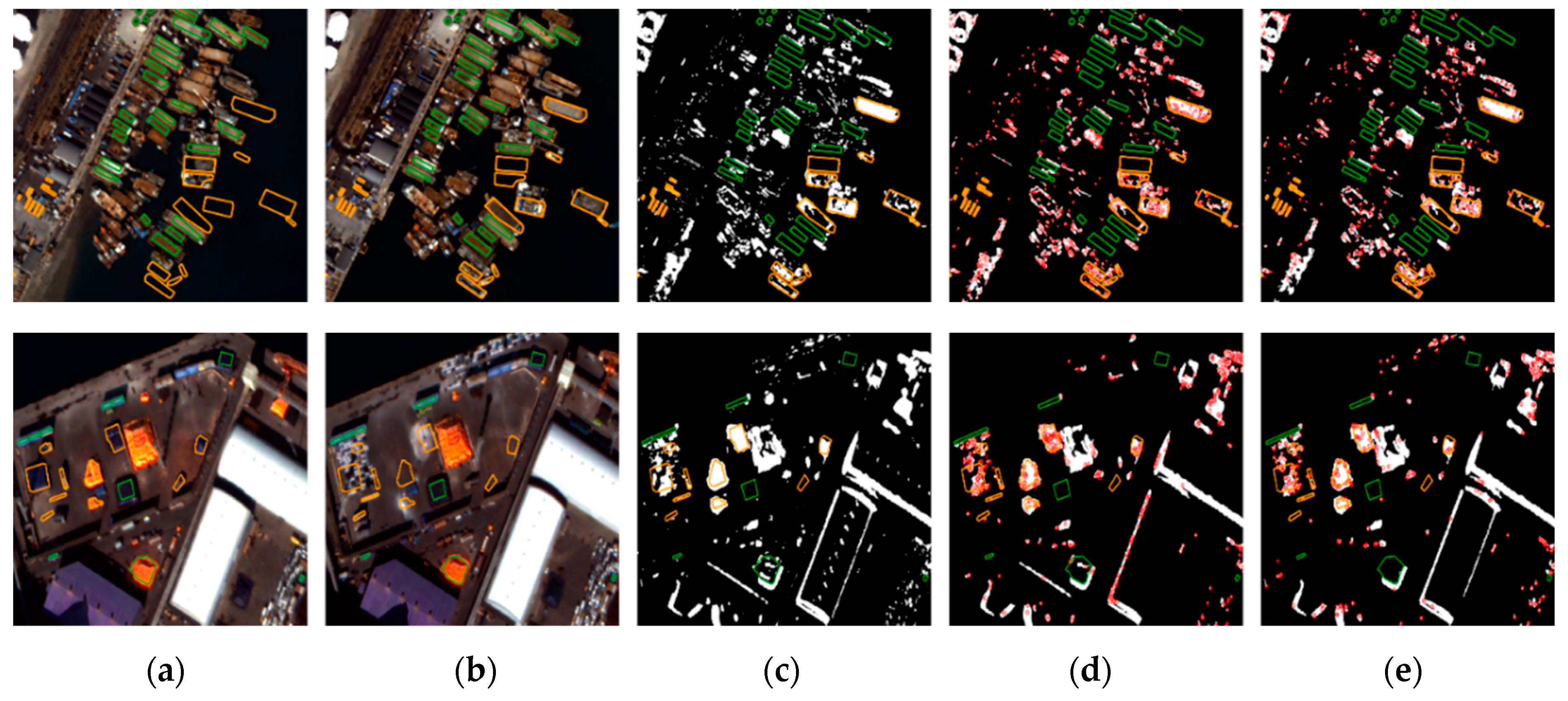
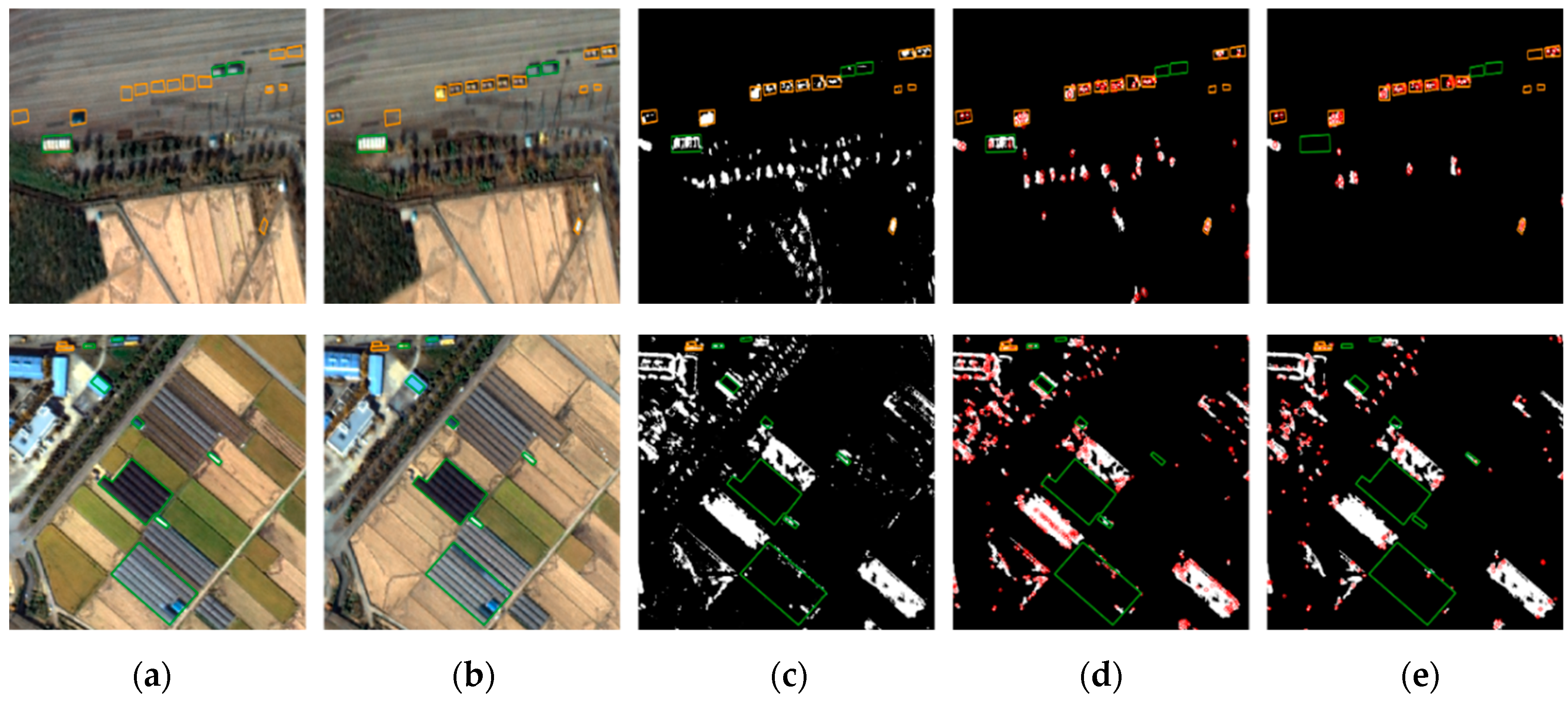
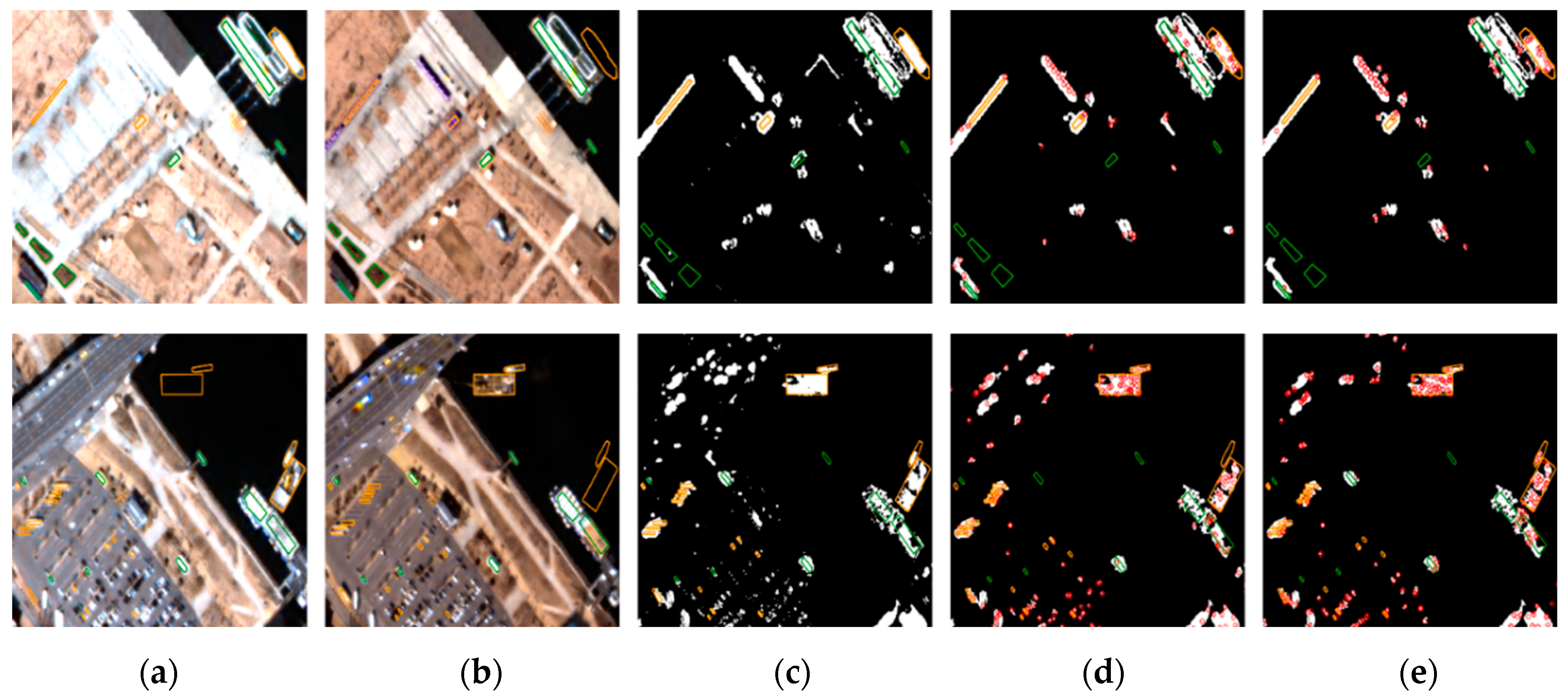
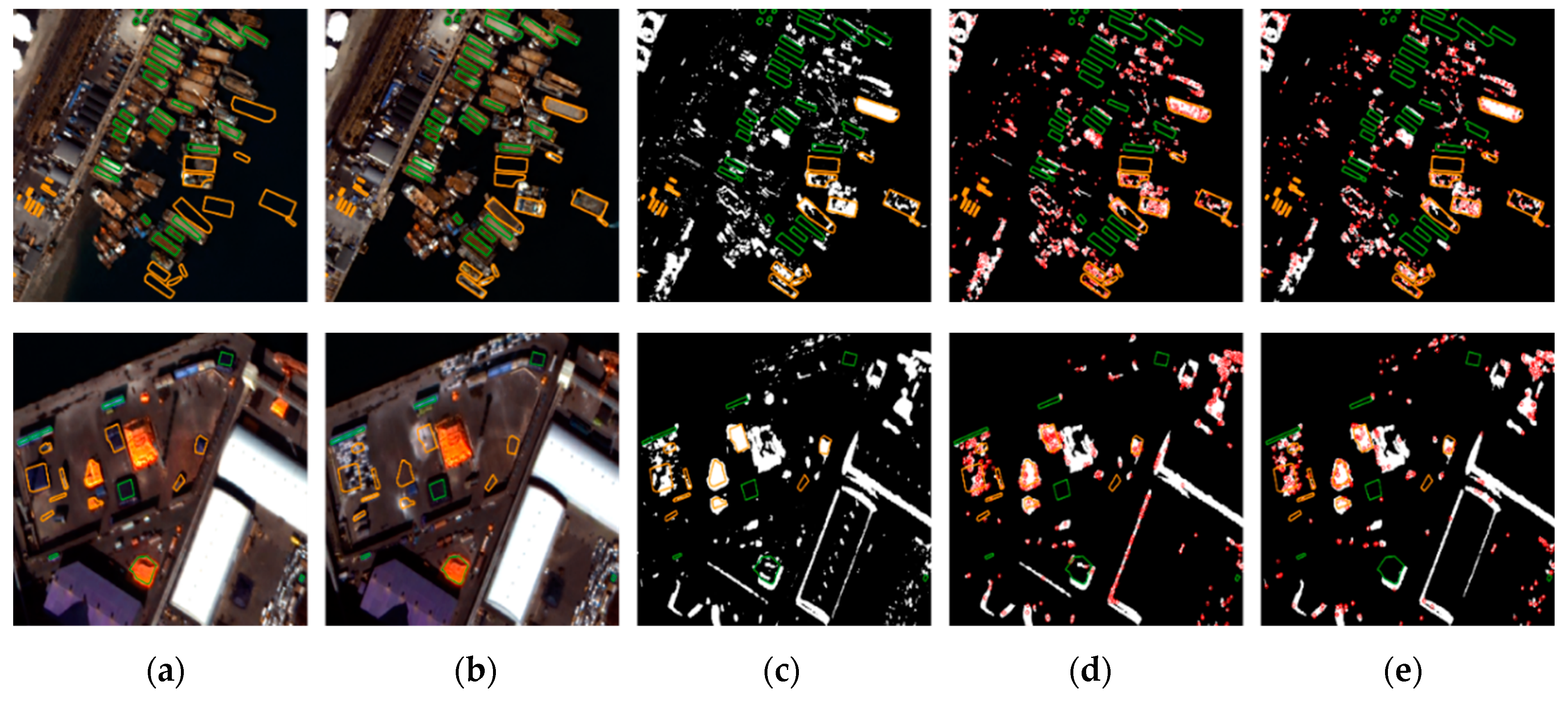
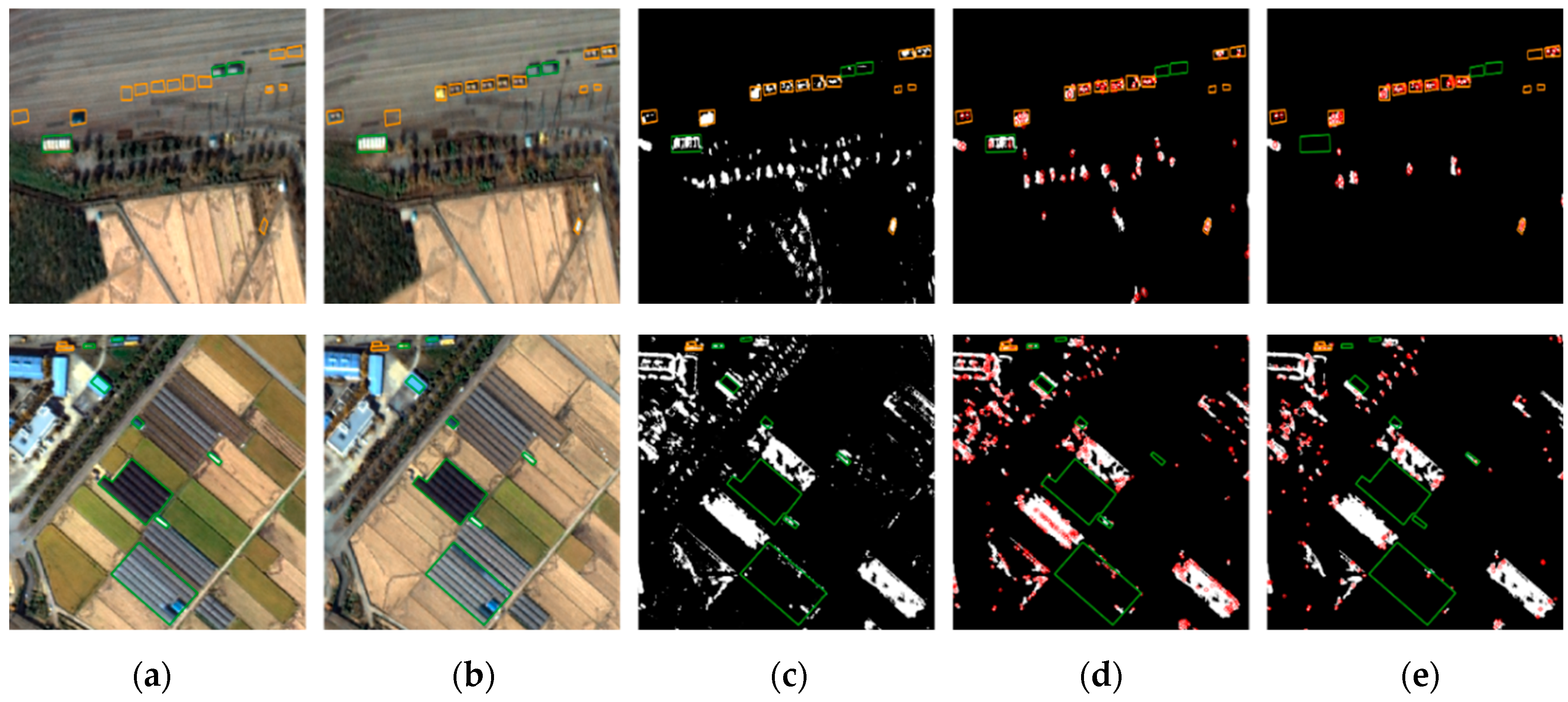
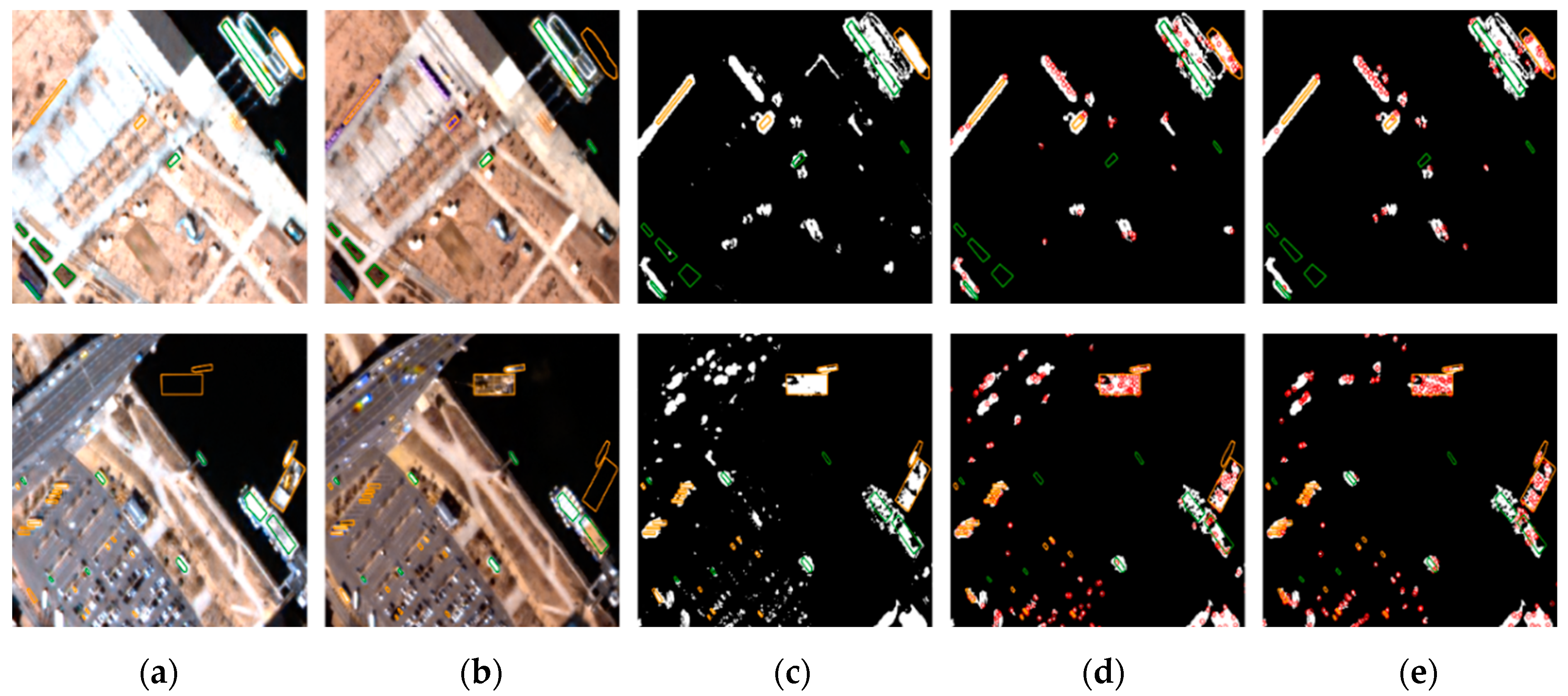
4.3. Change Analysis Results
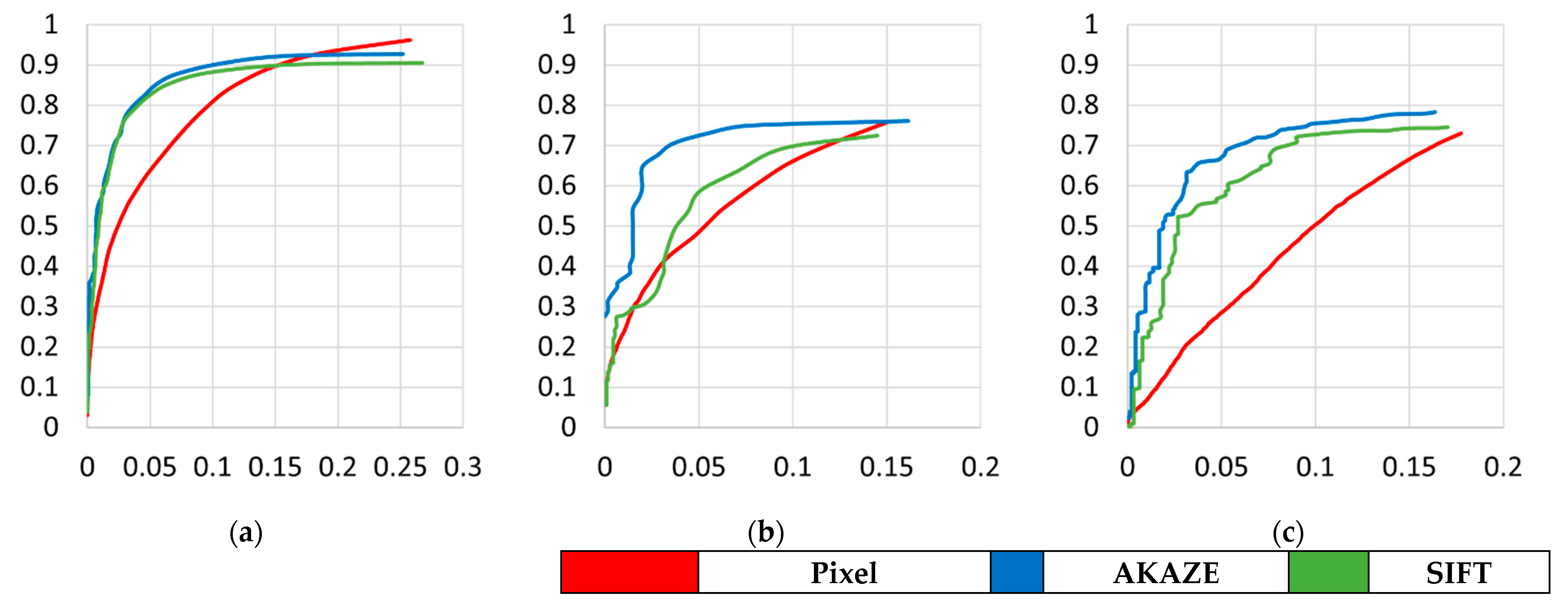
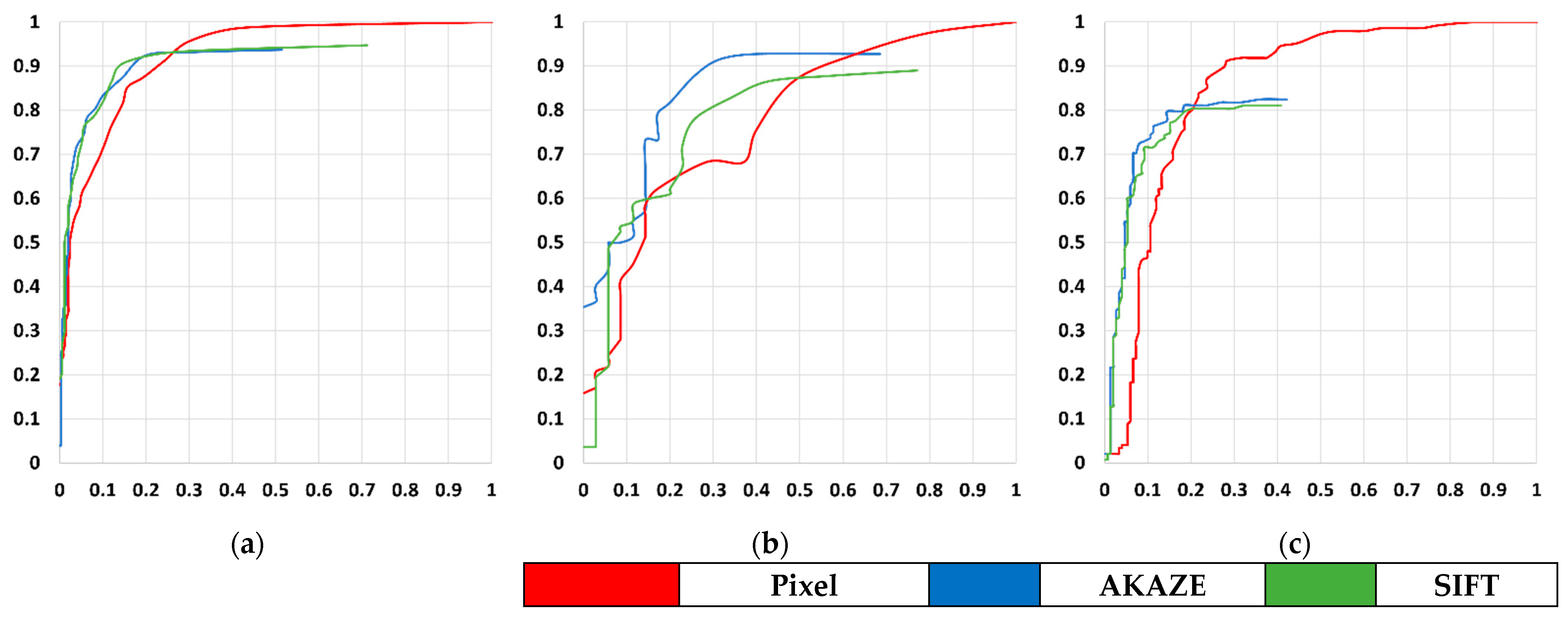
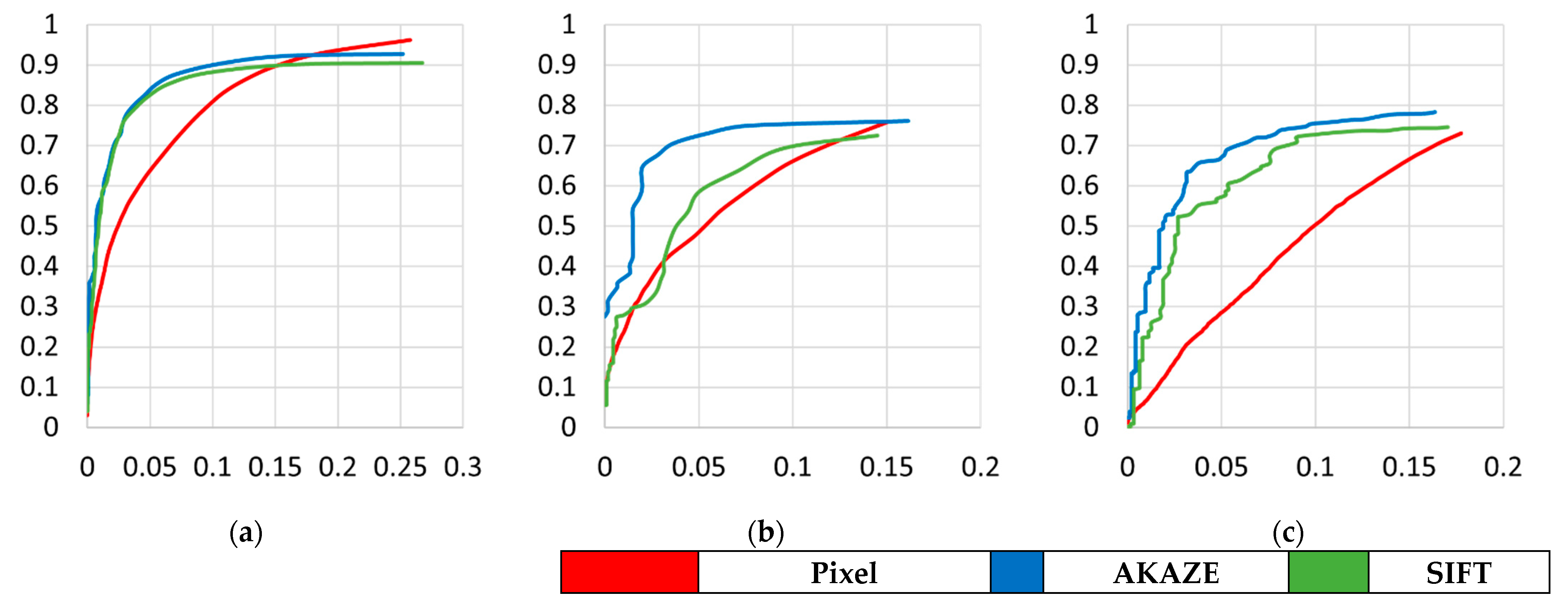
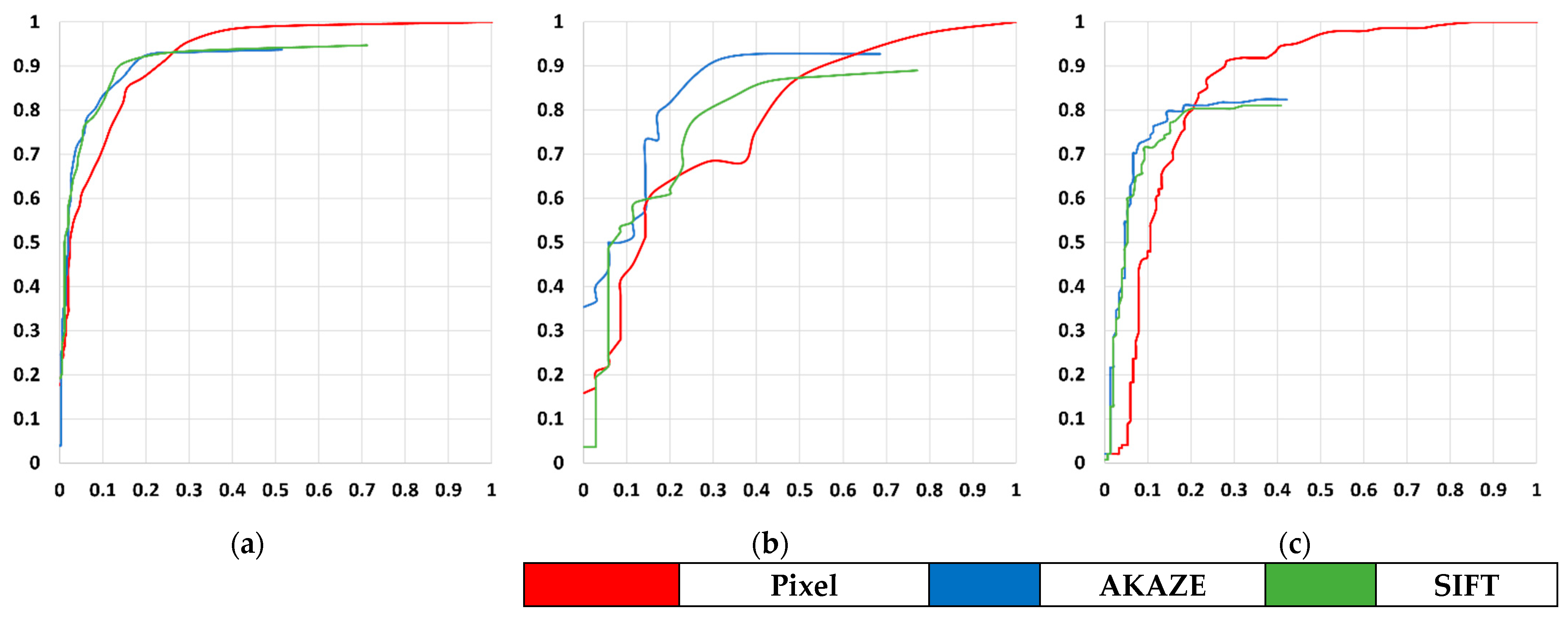
4.4. Analysis of Change Detection Performance
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Planet. Available online: https://www.planet.com/markets/education-and-research/ (accessed on 1 September 2021).
- Earth-i. Available online: https://earthi.space/industries/ (accessed on 1 September 2021).
- MAXAR. Available online: https://www.maxar.com/industries (accessed on 1 September 2021).
- Zhang, C.; Wei, S.; Ji, S.; Lu, M. Detecting large-scale urban land cover changes from very high resolution remote sensing images using CNN-based classification. ISPRS Int. J. Geo-Inf. 2019, 8, 189. [Google Scholar] [CrossRef] [Green Version]
- Silveira, E.M.D.O.; Mello, J.M.D.; Acerbi Júnior, F.W.; Carvalho, L.M.T.D. Object-based land-cover change detection applied to Brazilian seasonal savannahs using geostatistical features. Int. J. Remote Sens. 2018, 39, 2597–2619. [Google Scholar] [CrossRef]
- Cao, C.; Dragićević, S.; Li, S. Land-use change detection with convolutional neural network methods. Environments 2019, 6, 25. [Google Scholar] [CrossRef] [Green Version]
- Bueno, I.T.; Acerbi Junior, F.W.; Silveira, E.M.; Mello, J.M.; Carvalho, L.M.; Gomide, L.R.; Withey, K.; Scolforo, J.R.S. Object-based change detection in the Cerrado biome using landsat time series. Remote Sens. 2019, 11, 570. [Google Scholar] [CrossRef] [Green Version]
- Desclée, B.; Bogaert, P.; Defourny, P. Forest change detection by statistical object-based method. Remote Sens. Environ. 2006, 102, 1–11. [Google Scholar] [CrossRef]
- Housman, I.W.; Chastain, R.A.; Finco, M.V. An evaluation of forest health insect and disease survey data and satellite-based remote sensing forest change detection methods: Case studies in the United States. Remote Sens. 2018, 10, 1184. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Xu, Y.J. Comparison of remote sensing change detection techniques for assessing hurricane damage to forests. Environ. Monit. Assess. 2010, 162, 311–326. [Google Scholar] [CrossRef] [PubMed]
- Sublime, J.; Kalinicheva, E. Automatic post-disaster damage mapping using deep-learning techniques for change detection: Case study of the tohoku tsunami. Remote Sens. 2019, 11, 1123. [Google Scholar] [CrossRef] [Green Version]
- Hakdaoui, S.; Emran, A.; Pradhan, B.; Lee, C.W.; Nguemhe Fils, S.C. A collaborative change detection approach on multi-sensor spatial imagery for desert wetland monitoring after a flash flood in Southern Morocco. Remote Sens. 2019, 11, 1042. [Google Scholar] [CrossRef] [Green Version]
- El-Asmar, H.M.; Hereher, M.E. Change detection of the coastal zone east of the Nile Delta using remote sensing. Environ. Earth Sci. 2011, 62, 769–777. [Google Scholar] [CrossRef]
- Peng, D.; Zhang, Y.; Guan, H. End-to-end change detection for high resolution satellite images using improved UNet++. Remote Sens. 2019, 11, 1382. [Google Scholar] [CrossRef] [Green Version]
- ZhiYong, L.; Liu, T.; Benediktsson, J.A.; Falco, N. Land cover change detection techniques: Very-high-resolution optical images: A review. IEEE Geosci. Remote Sens. Mag. 2021, 2–21. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, X.; Chen, G.; Dai, F.; Gong, Y.; Zhu, K. Change detection based on Faster R-CNN for high-resolution remote sensing images. Remote Sens. Lett. 2018, 9, 923–932. [Google Scholar] [CrossRef]
- Huang, X.; Cao, Y.; Li, J. An automatic change detection method for monitoring newly constructed building areas using time-series multi-view high-resolution optical satellite images. Remote Sens. Environ. 2020, 244, 111802. [Google Scholar] [CrossRef]
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J. Change detection techniques for remote sensing applications: A survey. Earth Sci. Inform. 2019, 12, 143–160. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F.; et al. Geographic object-based image analysis–towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Xiao, P.; Yuan, M.; Zhang, X.; Feng, X.; Guo, Y. Cosegmentation for object-based building change detection from high-resolution remotely sensed images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1587–1603. [Google Scholar] [CrossRef]
- Wen, D.; Huang, X.; Bovolo, F.; Li, J.; Ke, X.; Zhang, A.; Benediktsson, J.A. Change Detection from Very-High-Spatial-Resolution Optical Remote Sensing Images: Methods, applications, and future directions. IEEE Geosci. Remote Sens. Mag. 2021, 2–35. [Google Scholar] [CrossRef]
- Tan, K.; Jin, X.; Plaza, A.; Wang, X.; Xiao, L.; Du, P. Automatic change detection in high-resolution remote sensing images by using a multiple classifier system and spectral–spatial features. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3439–3451. [Google Scholar] [CrossRef]
- Yu, H.; Yang, W.; Hua, G.; Ru, H.; Huang, P. Change detection using high resolution remote sensing images based on active learning and Markov random fields. Remote Sens. 2017, 9, 1233. [Google Scholar] [CrossRef] [Green Version]
- Dalla Mura, M.; Benediktsson, J.A.; Bovolo, F.; Bruzzone, L. An unsupervised technique based on morphological filters for change detection in very high resolution images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 433–437. [Google Scholar] [CrossRef]
- Tang, Y.; Huang, X.; Zhang, L. Fault-tolerant building change detection from urban high-resolution remote sensing imagery. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1060–1064. [Google Scholar] [CrossRef]
- Huang, X.; Zhu, T.; Zhang, L.; Tang, Y. A novel building change index for automatic building change detection from high-resolution remote sensing imagery. Remote Sens. Lett. 2014, 5, 713–722. [Google Scholar] [CrossRef]
- Wei, C.; Zhao, P.; Li, X.; Wang, Y.; Liu, F. Unsupervised change detection of VHR remote sensing images based on multi-resolution Markov Random Field in wavelet domain. Int. J. Remote Sens. 2019, 40, 7750–7766. [Google Scholar] [CrossRef]
- Hou, B.; Wang, Y.; Liu, Q. Change detection based on deep features and low rank. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2418–2422. [Google Scholar] [CrossRef]
- Huang, X.; Chen, H.; Gong, J. Angular difference feature extraction for urban scene classification using ZY-3 multi-angle high-resolution satellite imagery. ISPRS J. Photogramm. Remote Sens. 2018, 135, 127–141. [Google Scholar] [CrossRef]
- Tian, J.; Reinartz, P.; d’Angelo, P.; Ehlers, M. Region-based automatic building and forest change detection on Cartosat-1 stereo imagery. ISPRS J. Photogramm. Remote Sens. 2013, 79, 226–239. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Solutions, T. Fast explicit diffusion for accelerated features in nonlinear scale spaces. IEEE Trans. Patt. Anal. Mach. Intell. 2011, 34, 1281–1298. [Google Scholar]
- Li, Y.; Zhou, J. Fast and effective image copy-move forgery detection via hierarchical feature point matching. IEEE Trans. Inf. Forensics Secur. 2018, 14, 1307–1322. [Google Scholar] [CrossRef]
- Guo, F.; Yang, J.; Chen, Y.; Yao, B. Research on image detection and matching based on SIFT features. In Proceedings of the 2018 3rd International Conference on Control and Robotics Engineering (ICCRE), Nagoya, Japan, 20–23 April 2018; pp. 130–134. [Google Scholar]
- Gesto-Diaz, M.; Tombari, F.; Gonzalez-Aguilera, D.; Lopez-Fernandez, L.; Rodriguez-Gonzalvez, P. Feature matching evaluation for multimodal correspondence. ISPRS J. Photogramm. Remote Sens. 2017, 129, 179–188. [Google Scholar] [CrossRef]
- Gong, J.; Hu, X.; Pang, S.; Li, K. Patch matching and dense CRF-based co-refinement for building change detection from Bi-temporal aerial images. Sensors 2019, 19, 1557. [Google Scholar] [CrossRef] [Green Version]
- Nebiker, S.; Lack, N.; Deuber, M. Building change detection from historical aerial photographs using dense image matching and object-based image analysis. Remote Sens. 2014, 6, 8310–8336. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Song, Y.; Cui, S.; Zhu, H.; Sun, J.; Qin, W. A Novel Change Detection Framework in Urban Area Using Multilevel Matching Feature and Automatic Sample Extraction Strategy. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3967–3987. [Google Scholar] [CrossRef]
- Hossain, M.D.; Chen, D. Segmentation for Object-Based Image Analysis (OBIA): A review of algorithms and challenges from remote sensing perspective. ISPRS J. Photogramm. Remote Sens. 2019, 150, 115–134. [Google Scholar] [CrossRef]
- Kavzoglu, T. Increasing the accuracy of neural network classification using refined training data. Environ. Model. Softw. 2009, 24, 850–858. [Google Scholar] [CrossRef]
- Yoon, S.; Son, J.; Park, H.; Seo, J.; Lee, Y.; Ban, S.; Choi, J.; Kim, B.; Lee, H.J.; Lee, K.; et al. CAS 500-1/2 Image Utilization Technology and System Development: Achievement and Contribution. Korean J. Remote Sens. 2020, 36, 867–879. [Google Scholar]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar]
- de Lima, R.; Cabrera-Ponce, A.A.; Martinez-Carranza, J. Parallel hashing-based matching for real-time aerial image mosaicking. J. Real Time Image Process. 2021, 18, 143–156. [Google Scholar] [CrossRef]
- Nielsen, A.A.; Conradsen, K.; Simpson, J.J. Multivariate alteration detection (MAD) and MAF postprocessing in multispectral, bitemporal image data: New approaches to change detection studies. Remote Sens. Environ. 1998, 64, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, A.A. The regularized iteratively reweighted MAD method for change detection in multi-and hyperspectral data. IEEE Trans. Image process. 2007, 16, 463–478. [Google Scholar] [CrossRef] [Green Version]
- Du, B.; Wang, Y.; Wu, C.; Zhang, L. Unsupervised scene change detection via latent Dirichlet allocation and multivariate alteration detection. IEEE J. Sel. Appl. Earth Obs. Remote Sens. 2018, 11, 4676–4689. [Google Scholar] [CrossRef]
- Migas-Mazur, R.; Kycko, M.; Zwijacz-Kozica, T.; Zagajewski, B. Assessment of Sentinel-2 images, support vector machines and change detection algorithms for bark beetle outbreaks mapping in the Tatra mountains. Remote Sens. 2021, 13, 3314. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Incheon | Chilgok | Seoul |
|---|---|---|---|
| Acquisition dates of previous images | 18.01.19 | 18.10.24 | 17.02.23 |
| Acquisition dates of recent images | 18.01.27 | 18.11.01 | 17.02.24 |
| Incheon | Chilgok | Seoul | |
|---|---|---|---|
| Number of changed objects | 400 | 82 | 149 |
| Number of unchanged objects | 350 | 35 | 152 |
| Average size of changed objects (pixels/m2) | 660/165 | 196/49 | 90/23 |
| Average size of unchanged objects (pixels/m2) | 398/100 | 1114/278 | 266/66 |
| Study Area | Extractor Type | Number of Extracted Features | References with Features/ Total Reference Objects | |||
|---|---|---|---|---|---|---|
| From the Total Area | From Changed References | From Unchanged References | Changed | Unchanged | ||
| Incheon | AKAZE | 389,192 | 4972 | 2216 | 383/400 | 283/350 |
| SIFT | 642,565 | 5743 | 3321 | 390/400 | 336/350 | |
| Chilgok | AKAZE | 617,735 | 523 | 601 | 82/82 | 35/35 |
| SIFT | 954,061 | 448 | 1111 | 82/82 | 35/35 | |
| Seoul | AKAZE | 136,619 | 608 | 954 | 139/148 | 138/152 |
| SIFT | 123,946 | 449 | 634 | 143/148 | 139/152 | |
| Total | AKAZE | - | - | - | 604/630 | 456/537 |
| SIFT | - | - | - | 615/630 | 510/537 | |
| Study Area | Extractor Type | Overall | In Changed References | In Unchanged References | |||
|---|---|---|---|---|---|---|---|
| Unmatched | Matched | Unmatched | Matched | Unmatched | Matched | ||
| Incheon | AKAZE | 171,782 | 217,410 | 4614 | 358 | 558 | 1658 |
| SIFT | 314,575 | 327,990 | 5226 | 517 | 1231 | 2090 | |
| Chilgok | AKAZE | 220,090 | 397,645 | 398 | 125 | 97 | 504 |
| SIFT | 413,291 | 540,770 | 334 | 114 | 305 | 806 | |
| Seoul | AKAZE | 66,391 | 70,228 | 476 | 132 | 156 | 798 |
| SIFT | 66,779 | 57,167 | 335 | 114 | 108 | 526 | |
| Total | AKAZE | 40.07% | 59.93% | 89.92% | 10.08% | 21.51% | 78.49% |
| SIFT | 46.18% | 53.82% | 88.78% | 11.22% | 32.45% | 67.55% | |
| Study Area | Method | Precision | Accuracy | False Alarms | Recall | F1 | AUC_0.1 |
|---|---|---|---|---|---|---|---|
| Incheon | Pixel | 0.9354 | 0.8519 | 0.1088 | 0.8311 | 0.8801 | 0.0682 |
| AKAZE | 0.9499 | 0.9009 | 0.1069 | 0.9045 | 0.9266 | 0.0850 | |
| SIFT | 0.9404 | 0.8896 | 0.0967 | 0.8816 | 0.9100 | 0.0741 | |
| Chilgok | Pixel | 0.7674 | 0.8247 | 0.0715 | 0.5729 | 0.6560 | 0.0464 |
| AKAZE | 0.8950 | 0.8425 | 0.0765 | 0.7495 | 0.8158 | 0.0814 | |
| SIFT | 0.7851 | 0.8454 | 0.0702 | 0.6362 | 0.7028 | 0.0491 | |
| Seoul | Pixel | 0.6271 | 0.8010 | 0.1004 | 0.5059 | 0.5600 | 0.0280 |
| AKAZE | 0.8159 | 0.8393 | 0.1090 | 0.7582 | 0.7860 | 0.0680 | |
| SIFT | 0.8363 | 0.8283 | 0.1009 | 0.7283 | 0.7786 | 0.0537 | |
| Mean | Pixel | 0.7766 | 0.8259 | 0.0936 | 0.6366 | 0.6987 | 0.0475 |
| AKAZE | 0.8869 | 0.8609 | 0.0975 | 0.8041 | 0.8428 | 0.0781 | |
| SIFT | 0.8539 | 0.8544 | 0.0893 | 0.7487 | 0.7971 | 0.0590 |
| Study Area | Method | Precision | Accuracy | False Alarms | Recall | F1 |
|---|---|---|---|---|---|---|
| Incheon | Pixel | 0.9488 | 0.7972 | 0.0746 | 0.7295 | 0.8248 |
| AKAZE | 0.9659 | 0.7994 | 0.0480 | 0.7189 | 0.8243 | |
| SIFT | 0.9584 | 0.7970 | 0.0592 | 0.7211 | 0.8230 | |
| Chilgok | Pixel | 0.7059 | 0.8283 | 0.1210 | 0.7053 | 0.7056 |
| AKAZE | 0.8358 | 0.8693 | 0.0556 | 0.6870 | 0.7541 | |
| SIFT | 0.7756 | 0.8520 | 0.0826 | 0.6933 | 0.7321 | |
| Seoul | Pixel | 0.5677 | 0.7955 | 0.1948 | 0.7664 | 0.6522 |
| AKAZE | 0.6430 | 0.8300 | 0.1337 | 0.7215 | 0.6800 | |
| SIFT | 0.6074 | 0.8131 | 0.1544 | 0.7156 | 0.6571 | |
| Mean | Pixel | 0.7408 | 0.8070 | 0.1301 | 0.7337 | 0.7275 |
| AKAZE | 0.8149 | 0.8329 | 0.0791 | 0.7091 | 0.7528 | |
| SIFT | 0.7805 | 0.8207 | 0.0987 | 0.7100 | 0.7374 |
| Study Area | Domain | Changed Object | Unchanged Object | Precision | Accuracy | False Alarm | Recall | F1 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Correctly Detected | Miss Detected | Correctly Detected | False Detected | |||||||
| Incheon | Pixel | 291 | 109 | 313 | 37 | 0.8053 | 0.8872 | 0.1057 | 0.7275 | 0.7995 |
| AKAZE | 300 | 100 | 330 | 20 | 0.8400 | 0.9375 | 0.0571 | 0.7500 | 0.8333 | |
| SIFT | 278 | 122 | 335 | 15 | 0.8173 | 0.9488 | 0.0429 | 0.6950 | 0.8023 | |
| Chilgok | Pixel | 62 | 20 | 21 | 14 | 0.7094 | 0.8158 | 0.4000 | 0.7561 | 0.7848 |
| AKAZE | 67 | 15 | 28 | 7 | 0.8120 | 0.9054 | 0.2000 | 0.8171 | 0.8590 | |
| SIFT | 64 | 18 | 26 | 9 | 0.7692 | 0.8767 | 0.2571 | 0.7805 | 0.8258 | |
| Seoul | Pixel | 126 | 22 | 116 | 36 | 0.8067 | 0.7778 | 0.2368 | 0.8514 | 0.8129 |
| AKAZE | 108 | 40 | 138 | 14 | 0.8200 | 0.8852 | 0.0921 | 0.7297 | 0.8000 | |
| SIFT | 104 | 44 | 138 | 14 | 0.8067 | 0.8814 | 0.0921 | 0.7027 | 0.7820 | |
| Mean | Pixel | - | - | - | - | 0.7738 | 0.8269 | 0.2475 | 0.7783 | 0.7991 |
| AKAZE | - | - | - | - | 0.8240 | 0.9094 | 0.1164 | 0.7656 | 0.8308 | |
| SIFT | - | - | - | - | 0.7977 | 0.9023 | 0.1307 | 0.7261 | 0.8034 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, J.; Park, W.; Kim, T. Feature-Based Approach to Change Detection of Small Objects from High-Resolution Satellite Images. Remote Sens. 2022, 14, 462. https://doi.org/10.3390/rs14030462
Seo J, Park W, Kim T. Feature-Based Approach to Change Detection of Small Objects from High-Resolution Satellite Images. Remote Sensing. 2022; 14(3):462. https://doi.org/10.3390/rs14030462
Chicago/Turabian StyleSeo, Junghoon, Wonkyu Park, and Taejung Kim. 2022. "Feature-Based Approach to Change Detection of Small Objects from High-Resolution Satellite Images" Remote Sensing 14, no. 3: 462. https://doi.org/10.3390/rs14030462
APA StyleSeo, J., Park, W., & Kim, T. (2022). Feature-Based Approach to Change Detection of Small Objects from High-Resolution Satellite Images. Remote Sensing, 14(3), 462. https://doi.org/10.3390/rs14030462