
Sub-Decimeter Onboard Orbit Determination of LEO Satellites Using SSR Corrections: A Galileo-Based Case Study for the Sentinel-6A Satellite
 , ,
, ,
Abstract
1. Introduction
2. The Dataset
3. Algorithms and Models
3.1. Dynamical Model
3.2. Observation Model
3.3. Estimation
4. Application of SSR Corrections: Orbit Determination Results
4.1. Methodology
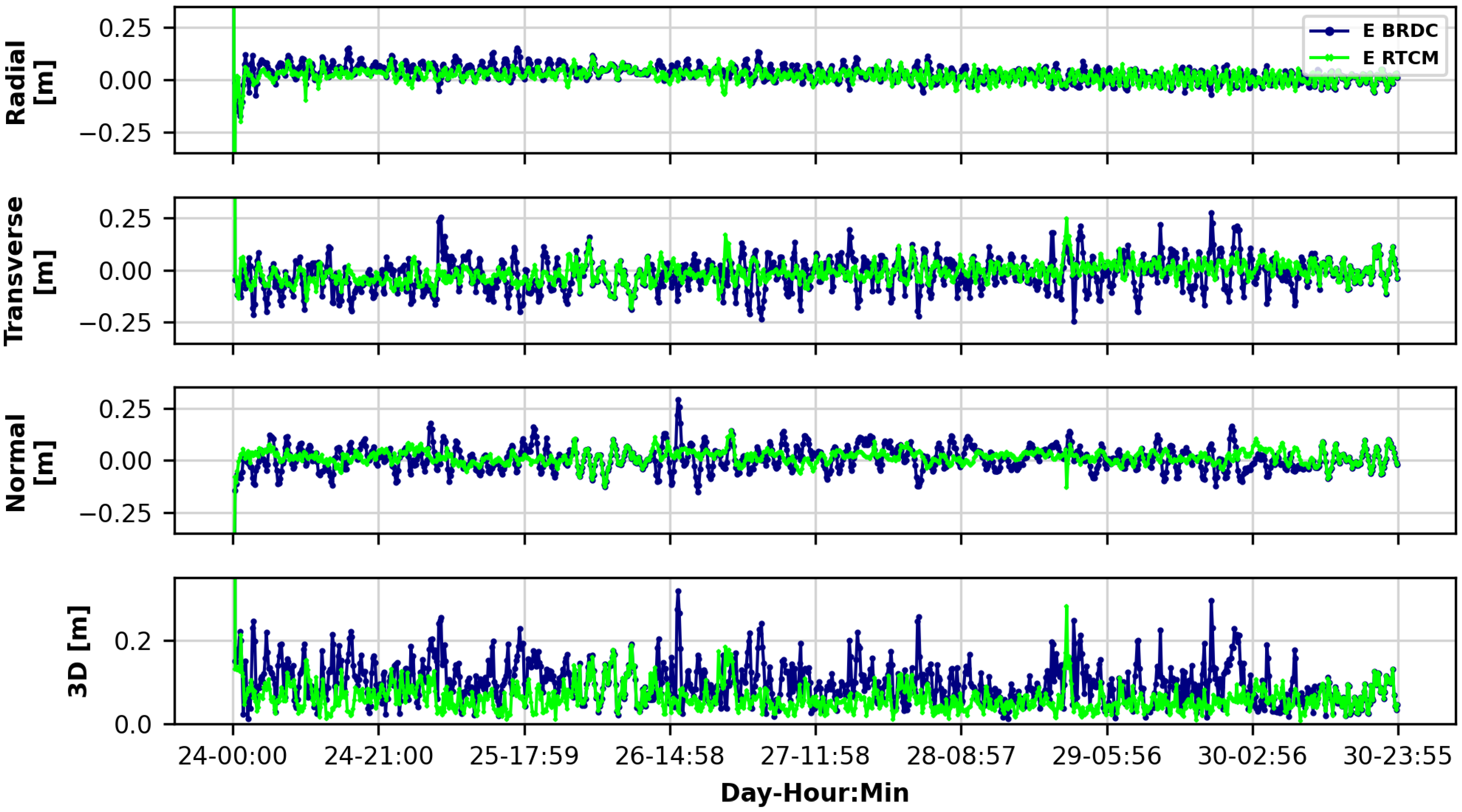
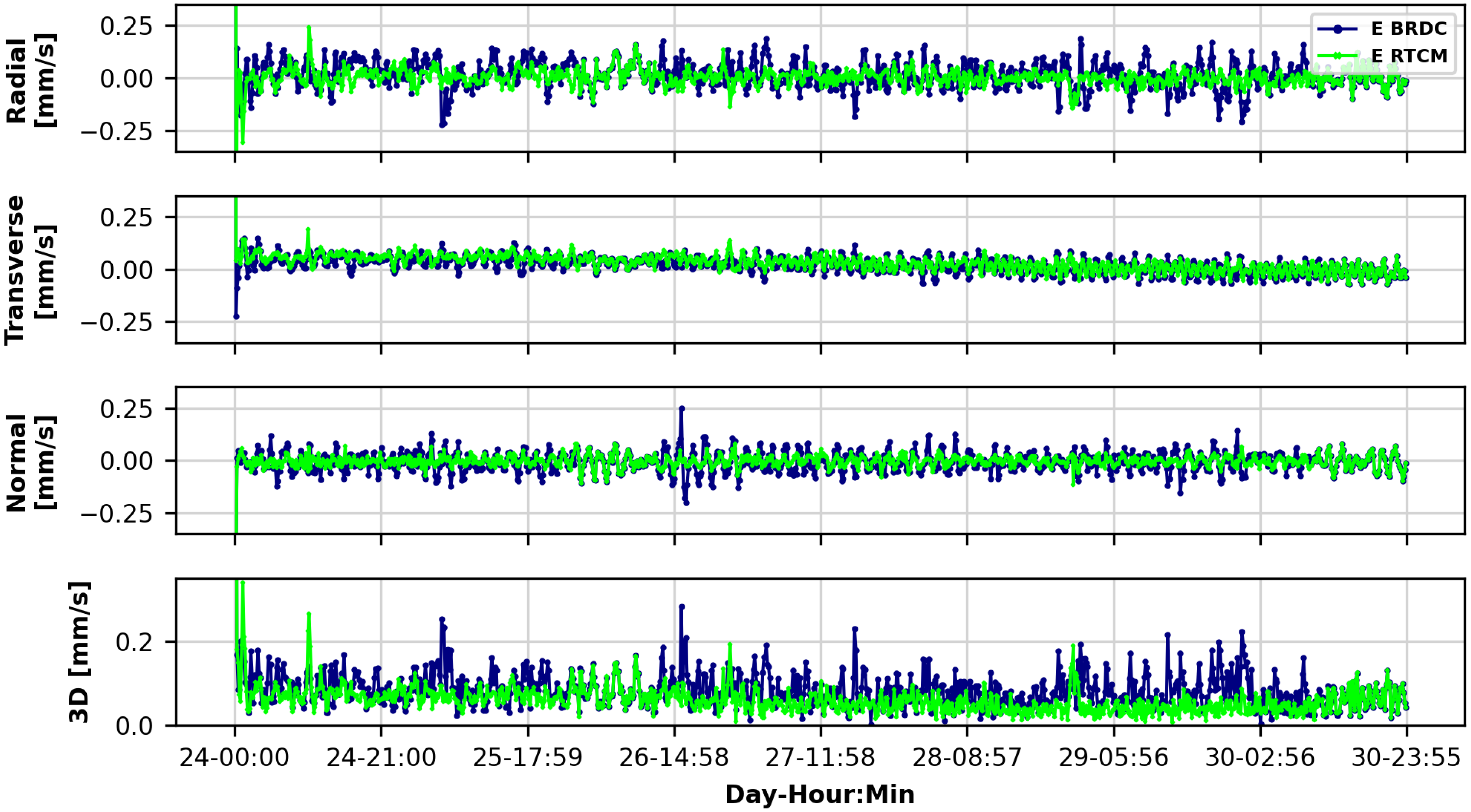
- Galileo only: hereafter named the E configuration;
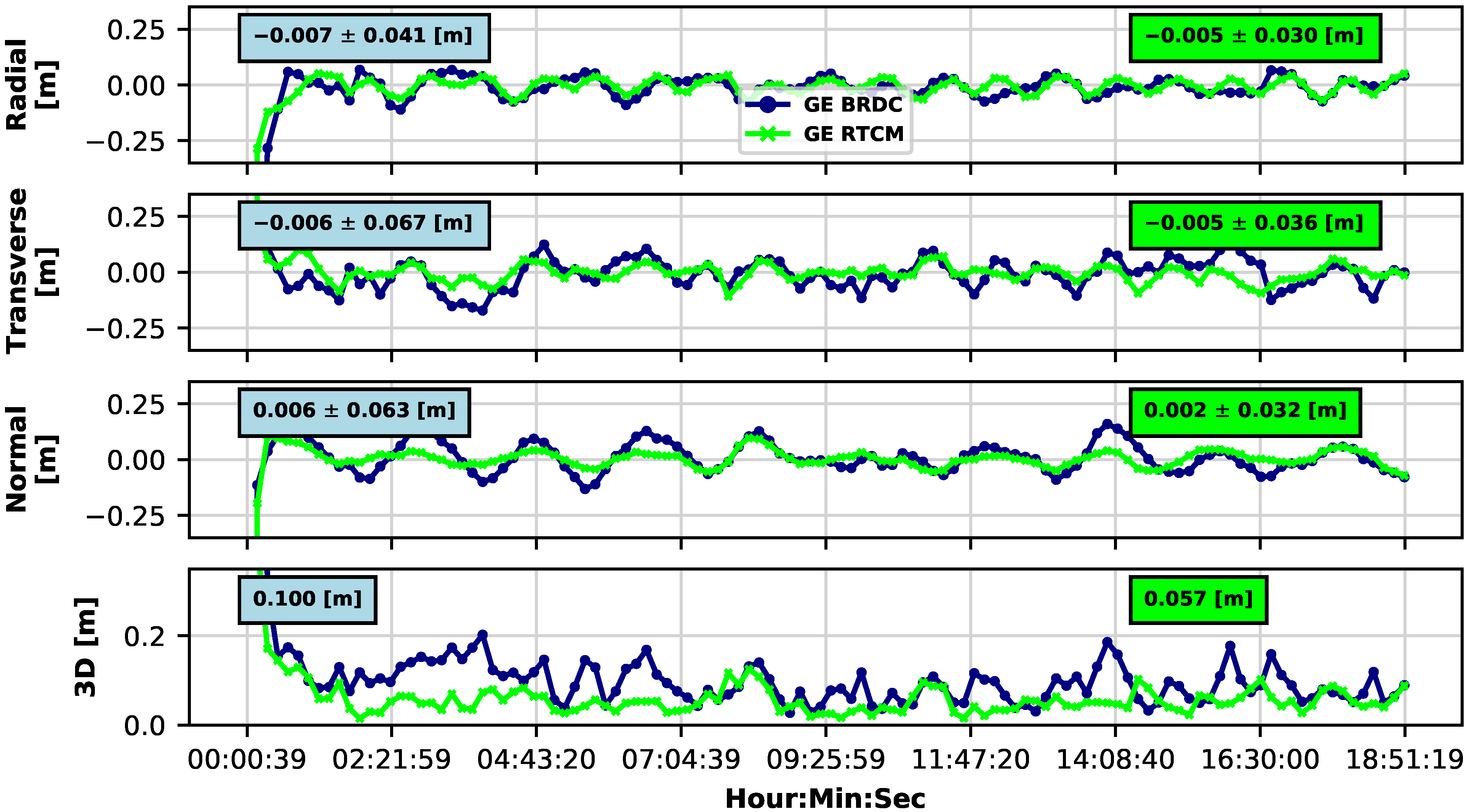
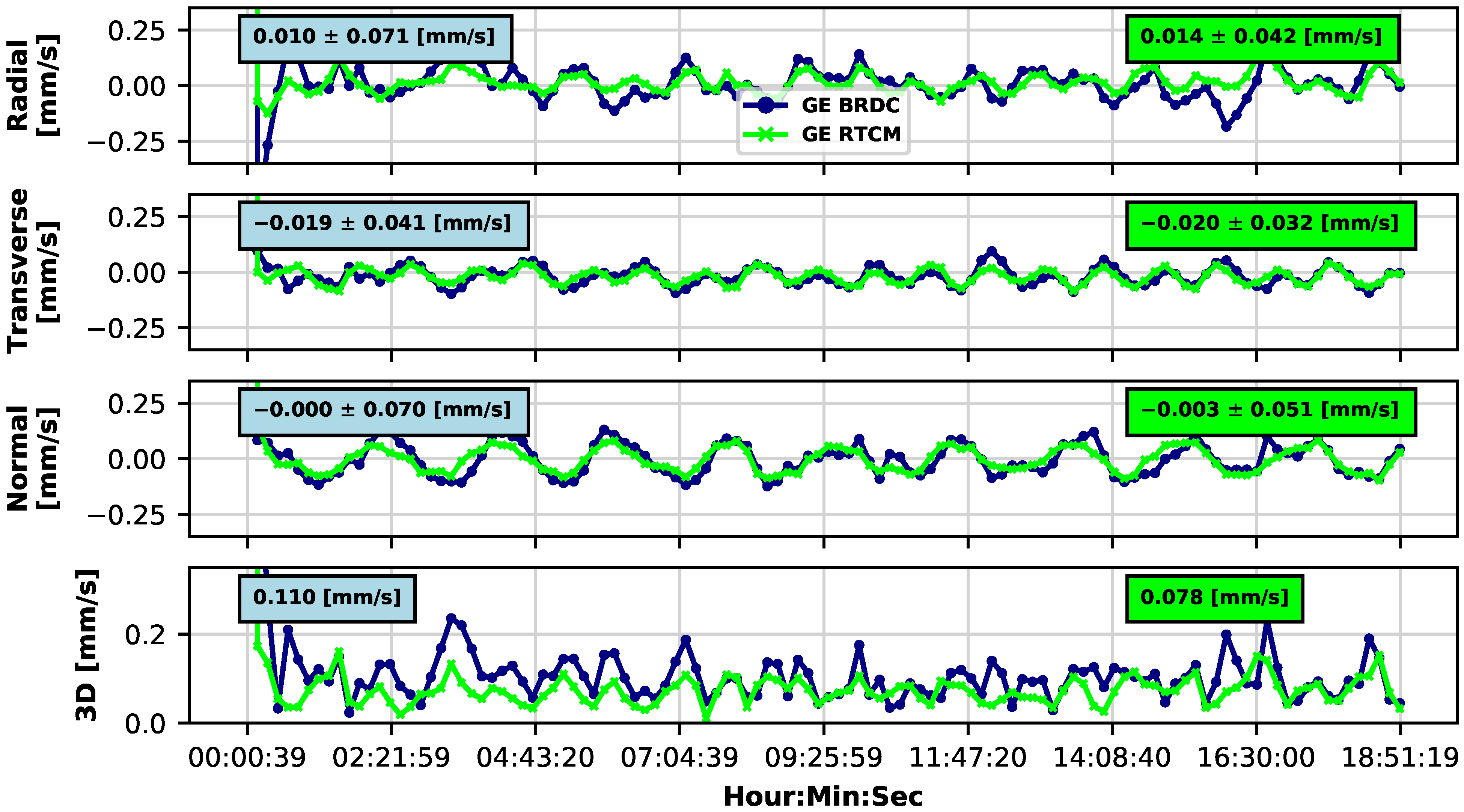
- GPS and Galileo: hereafter named the GE configuration.
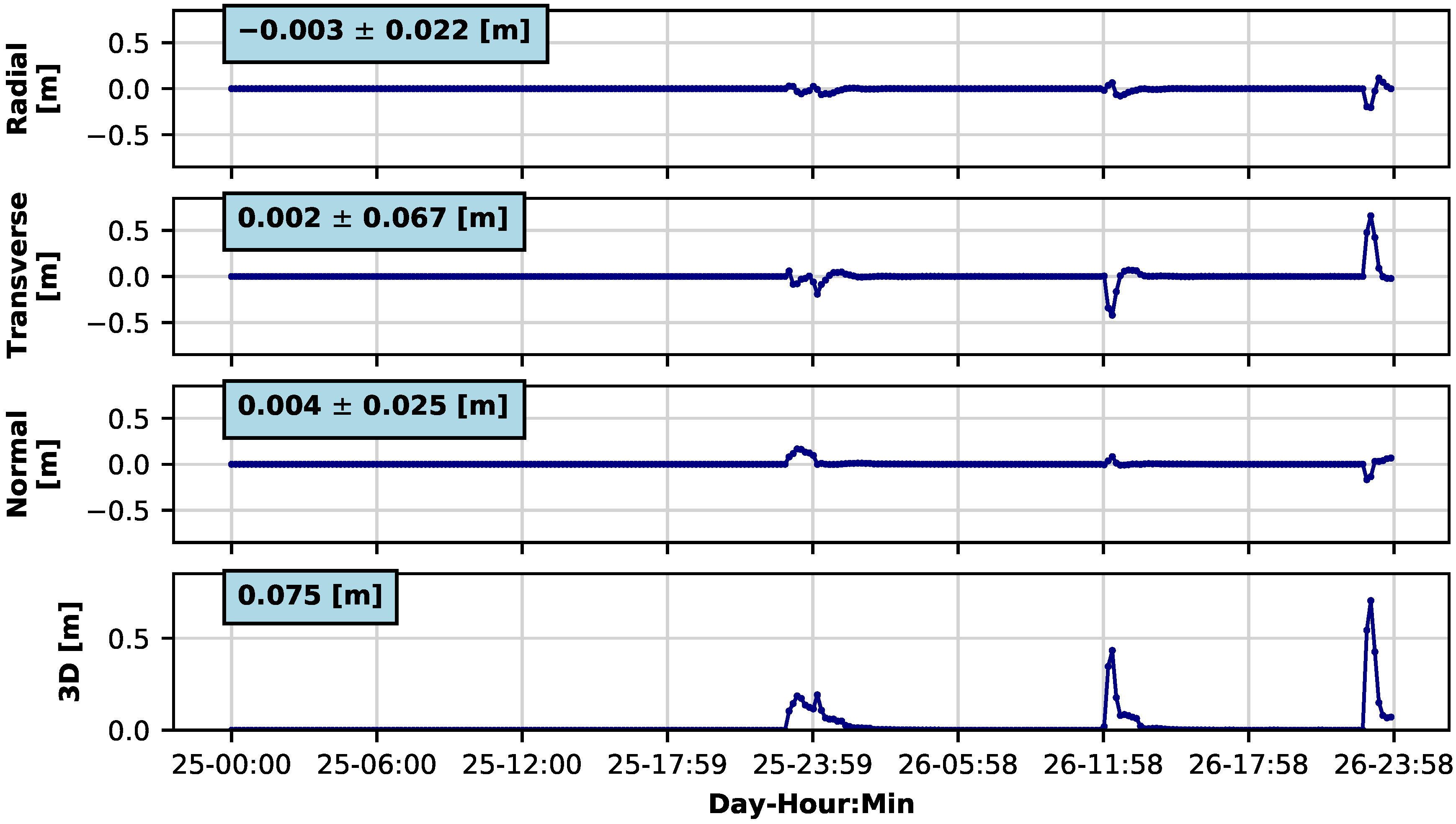
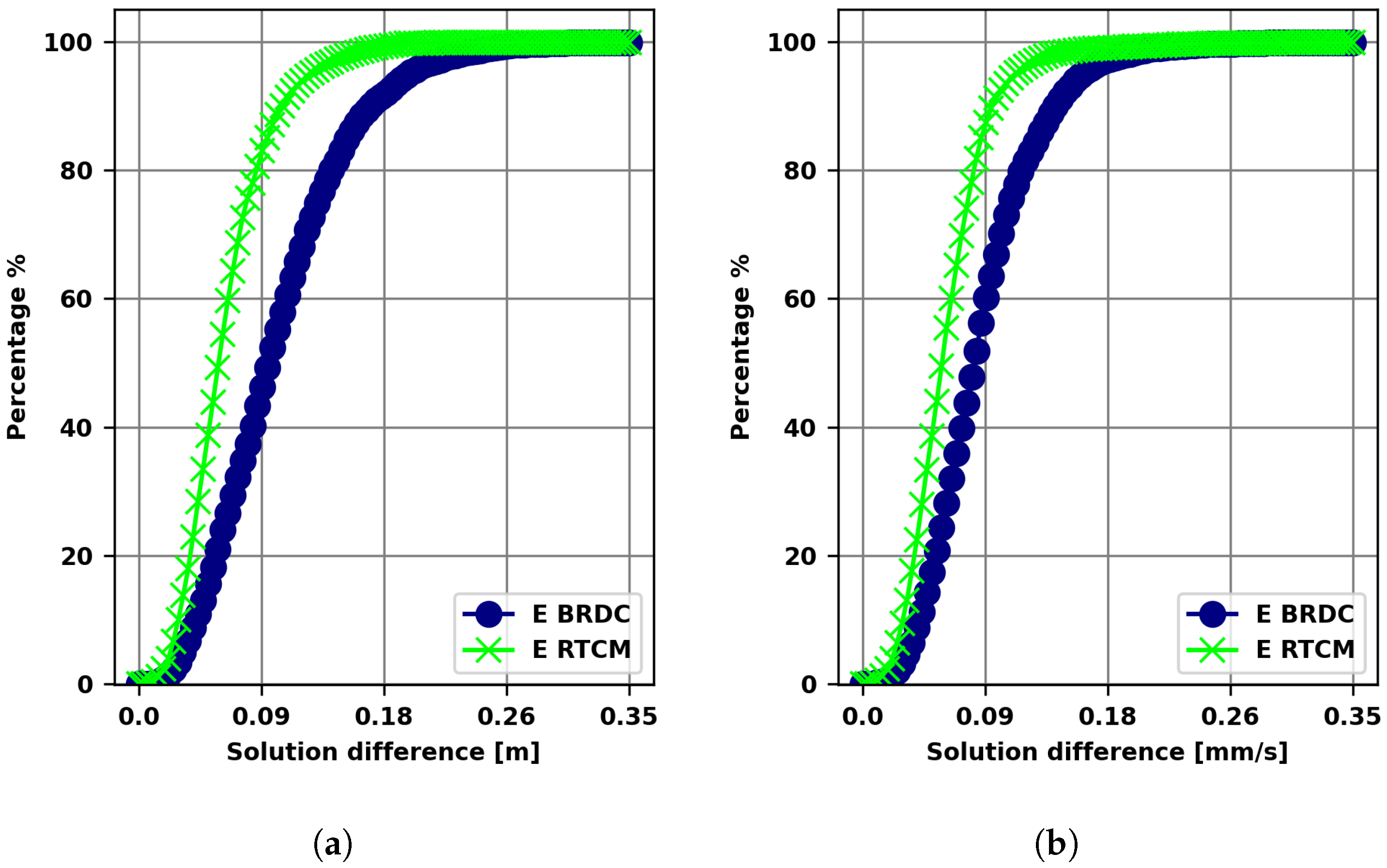
4.2. Spacecraft State Vector Estimation Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, B.; Ge, H.; Ge, M.; Nie, L.; Shen, Y.; Schuh, H. LEO enhanced Global Navigation Satellite System (LeGNSS) for real-time precise positioning services. Adv. Space Res. 2019, 63, 73–93. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Guan, M.; Gao, F.; Jiang, N. LEO-constellation-augmented multi-GNSS real-time PPP for rapid re-convergence in harsh environments. GPS Solut. 2022, 26, 29. [Google Scholar] [CrossRef]
- Scharroo, R.; Bonekamp, H.; Ponsard, C.; Parisot, F.; von Engeln, A.; Tahtadjiev, M.; de Vriendt, K.; Montagner, F. Jason continuity of services: Continuing the Jason altimeter data records as Copernicus Sentinel-6. Ocean Sci. 2016, 12, 471–479. [Google Scholar] [CrossRef]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Montenbruck, O.; Kunzi, F.; Hauschild, A. Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft. GPS Solut. 2022, 26, 12. [Google Scholar] [CrossRef]
- Darugna, F.; Casotto, S.; Bardella, M.; Sciarratta, M.; Zoccarato, P.; Giordano, P. Sentinel-6A GPS and Galileo Dual-Frequency Real-Time Reduced-Dynamics P2OD. In Proceedings of the 2022 10th Workshop on Satellite Navigation Technology (NAVITEC), Noordwijk, The Netherlands, 5–7 April 2022; pp. 1–12. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O. Precise real-time navigation of LEO satellites using GNSS broadcast ephemerides. Navig. J. Inst. Navig. 2021, 68, 419–432. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Carlin, L.; Hauschild, A.; Montenbruck, O. Precise point positioning with GPS and Galileo broadcast ephemerides. GPS Solut. 2021, 25, 77. [Google Scholar] [CrossRef]
- European Union. Galileo High Accuracy Service Signal-In-Space Interface Control Document (Galileo HAS SIS ICD), 2022. Issue 1.0. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_SIS_ICD_v1.0.pdf (accessed on 15 November 2022).
- Hauschild, A.; Montenbruck, O.; Steigenberger, P.; Martini, I.; Fernandez-Hernandez, I. Orbit determination of sentinel-6A using the Galileo high accuracy service test signal. GPS Solut. 2022, 26, 120. [Google Scholar] [CrossRef]
- RTCM Special Committee No. 104; RTCM Standard 10403.3 Differential GNSS (Global Navigation Satellite Systems) Services-Version 3; RTCM: Arlington, VA, USA, 2016.
- Wang, Z.; Li, Z.; Wang, L.; Wang, N.; Yang, Y.; Li, R.; Zhang, Y.; Liu, A.; Yuan, H.; Hoque, M. Comparison of the real-time precise orbit determination for LEO between kinematic and reduced-dynamic modes. Measurement 2022, 187, 110224. [Google Scholar] [CrossRef]
- Casotto, S.; Bardella, M.; Zoccarato, P.; Giordano, P. Real Time Reduced-Dynamics POD for LEO Satellites from GNSS Measurements. In Proceedings of the 2018 9th Workshop on Satellite Navigation Technology (NAVITEC), Noordwijk, The Netherlands, 5–7 December 2018. [Google Scholar]
- GOMspace. GOMX-5 Mission. 2019. Available online: https://gomspace.com/news/payload-collaboration-initiated-for-the-gomx-.aspx (accessed on 15 November 2022).
- Bastos, C.; Fernandes, R.; Prata, R.; Palomo, J.; Fernandez, A.; Darugna, F.; Bardella, M.; Sciarratta, M.; Casotto, S.; Giordano, P.; et al. Triple-band GNSS Receiver with E6 HAS corrections for Precise Onboard Orbit Determination in LEO. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 1053–1065. [Google Scholar]
- Cullen, R. Sentinel-6A POD Context, 2021. JC-TN-ESA-0420, v1.4; European Space Research and Technology Centre, European Space Agency: Noordwijk, The Netherlands, 2021. [Google Scholar]
- IGS/RTCM. RINEX—The Receiver Independent Exchange Format Version 3.04. International GNSS Service (IGS), RINEX Working Group and Radio Technical Commission for Maritime Services Special Committee 104 (RTCM–SC104). 2018. Available online: https://files.igs.org/pub/data/format/rinex304.pdf (accessed on 15 November 2022).
- Steigenberger, P.; Montenbruck, O.; Hessels, U. Performance evaluation of the early CNAV navigation message. Navig. J. Inst. Navig. 2015, 62, 219–228. [Google Scholar] [CrossRef]
- Yunck, T.P.; Melbourne, W.G.; Thornton, C. GPS-based satellite tracking system for precise positioning. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 450–457. [Google Scholar] [CrossRef]
- Wu, S.C.; Yunck, T.P.; Thornton, C.L. Reduced-dynamic technique for precise orbit determination of low earth satellites. J. Guid. Control Dyn. 1991, 14, 24–30. [Google Scholar] [CrossRef]
- Yunck, T.; Bertiger, W.; Wu, S.; Bar-Sever, Y.; Christensen, E.; Haines, B.; Lichten, S.; Muellerschoen, R.; Vigue, Y.; Willis, P. First assessment of GPS-based reduced dynamic orbit determination on TOPEX/Poseidon. Geophys. Res. Lett. 1994, 21, 541–544. [Google Scholar] [CrossRef]
- van den IJssel, J.; Encarnação, J.; Doornbos, E.; Visser, P. Precise science orbits for the Swarm satellite constellation. Adv. Space Res. 2015, 56, 1042–1055. [Google Scholar] [CrossRef]
- Förste, C.; Bruinsma, S.; Flechtner, F.; Abrykosov, O.; Dahle, C.; Marty, J.; Lemoine, J.; Biancale, R.; Barthelmes, F.; Neumayer, K.; et al. EIGEN-6C3-The latest Combined Global Gravity Field Model including GOCE data up to degree and order 1949 of GFZ Potsdam and GRGS Toulouse. In AGU Fall Meeting Abstracts; EGU General Assembly: Vienna, Austria, 2011; Volume 2011, p. G51A-0860. Available online: https://ui.adsabs.harvard.edu/abs/2014EGUGA..16.3707F/abstract (accessed on 15 November 2022).
- McCarthy, D.; Petit, G. IERS Technical Note No.32; Verlag des BKG: Frankfurt, Germany, 2003. [Google Scholar]
- Tapley, B.; Shutz, B.; Born, G. Statistical Orbit Determination; Elsevier Academic Press: San Diego, CA USA, 2004. [Google Scholar]
- Hull, D.G. Fourth-order Runge-Kutta integration with stepsize control. AIAA J. 1977, 15, 1505–1507. [Google Scholar] [CrossRef]
- Wu, J.; Wu, S.; Hajj, G.; Bertiger, W.; Lichten, S. Effects of antenna orientation on GPS carrier phase. Manuscr. Geod. 1993, 18, 91–98. [Google Scholar]
- Montenbruck, O.; Markgraf, M.; Naudet, J.; Santandrea, S.; Gantois, K.; Vuilleumier, P. Autonomous and precise navigation of the PROBA-2 spacecraft. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 7086. [Google Scholar]
- Wang, F.; Gong, X.; Sang, J.; Zhang, X. A novel method for precise onboard real-time orbit determination with a standalone GPS receiver. Sensors 2015, 15, 30403–30418. [Google Scholar] [CrossRef] [PubMed]
- CNES-SSALTO/POD. Sentinel-6A CNES POD Orbital Solution. 2021. Available online: https://cddis.nasa.gov/archive/doris/products/orbits/ssa/s6a/ (accessed on 12 February 2022).
- EUMETSAT. Sentinel-6 A GNSS-RO NTC Cal/Val Report. EUM/LEO-JASCS/REP/21/1243117, v1C. 2021. Available online: https://www-cdn.eumetsat.int/files/2021-11/Sentinel-6%20A%20GNSS-RO%20NTC%20Cal_Val%20Report.pdf (accessed on 14 November 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Description |
|---|---|
| Non-Sun-synchronous LEO orbit | |
| Repeat cycle: 9.92 days | |
| S6A orbit | Mean altitude: 1336 km |
| Eccentricity: 0.000094 | |
| Inclination: 66 | |
| S6A spacecraft | Mass: 1180.6 kg |
| parameters | CoM position: (1.533 m, −0.007 m, 0.037 m) |
| First | |
| Start: 2021-09-04 00:00:00.0 | |
| Time intervals | End: 2021-09-04 18:36:30.0 |
| (GPS time) | Second |
| Start: 2021-09-24 00:00:00.0 | |
| End: 2021-09-30 23:55:0.0 | |
| RINEX GNSS navigation data | |
| GNSS orbits and clocks | GPS: CNAV L1/L2 P(Y) |
| Galileo: FNAV E1/E5a | |
| SSR corrections | RTCM-SSR corrections from CNES mountpoint SSRA00CNE0. Update interval: 5 s |
| GNSS satellite code biases | TGD and ISC for L1 (1C) and L2 (2L) from GPS CNAV message |
| GNSS transmitting satellite: not applicable, zero PCO and PCV | |
| S6A receiver: | |
| GNSS antenna PCV | ARP (2.475 m, 0.000 m, −1.080 m) |
| PCO + PCV from in-flight calibration | |
| PCO L1/L2 (0.00 mm, 0.00 mm, 73.00 mm) | |
| PCO E1/E5a (0.00 mm, 0.00 mm, 93.00 mm) | |
| Earth Orientation Parameters | EOP IERS bulletin B |
| Solar Activity and Geomagnetic Activity | NOAA SAGA data |
| Item | Description |
|---|---|
| Force models | |
| Earth gravity field | EIGEN-6c4, deg = 50, order = 50 |
| Third-body perturbations | Point Mass model for Sun and Moon |
| Solid Earth tides | Compliant with IERS 2003 |
| Relativity | Post-Newtonian corrections |
| Solar radiation pressure | Cannon-ball model, Conical Earth shadow |
| Atmospheric drag | Cannon-ball model, NRLMSISE-00 density model |
| Empirical accelerations | First-order Gauss–Markov process in RTN directions |
| Attitude | S6A nominal attitude model (with yaw-steering law) |
| Observation model | |
| Measurement type | Ionosphere-free combination of dual-frequency pseudorange and carrier-phase GNSS observations |
| Phase wind-up | Corrected |
| Numerical integration | Runge–Kutta–Hull (2)4 |
| Estimation | |
| Type | Extended Kalman Filter |
| State parameters | position, velocity, drag, and SRP coefficients; empirical accelerations; receiver clock error; inter-system bias; carrier-phase ambiguities |
| Configuration | Radial [mm] | Transverse [mm] | Normal (mm) | 3D Position (RMS) (mm) | 95th Percentile (mm) |
|---|---|---|---|---|---|
| E BRDC | 31 ± 37 | −19 ± 79 | 11 ± 55 | 110 | 190 |
| E RTCM | 19 ± 29 | −12 ± 46 | 3 ± 31 | 69 | 119 |
| Configuration | Radial (m/s) | Transverse (m/s) | Normal (m/s) | 3D Position (RMS) (m/s) | 95th Percentile (m/s) |
|---|---|---|---|---|---|
| E BRDC | 15 ± 65 | 22 ± 38 | −5 ± 48 | 93 | 155 |
| E RTCM | 3 ± 38 | 29 ± 36 | −3 ± 27 | 66 | 106 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darugna, F.; Casotto, S.; Bardella, M.; Sciarratta, M.; Zoccarato, P. Sub-Decimeter Onboard Orbit Determination of LEO Satellites Using SSR Corrections: A Galileo-Based Case Study for the Sentinel-6A Satellite. Remote Sens. 2022, 14, 6121. https://doi.org/10.3390/rs14236121
Darugna F, Casotto S, Bardella M, Sciarratta M, Zoccarato P. Sub-Decimeter Onboard Orbit Determination of LEO Satellites Using SSR Corrections: A Galileo-Based Case Study for the Sentinel-6A Satellite. Remote Sensing. 2022; 14(23):6121. https://doi.org/10.3390/rs14236121
Chicago/Turabian StyleDarugna, Francesco, Stefano Casotto, Massimo Bardella, Mauro Sciarratta, and Paolo Zoccarato. 2022. "Sub-Decimeter Onboard Orbit Determination of LEO Satellites Using SSR Corrections: A Galileo-Based Case Study for the Sentinel-6A Satellite" Remote Sensing 14, no. 23: 6121. https://doi.org/10.3390/rs14236121
APA StyleDarugna, F., Casotto, S., Bardella, M., Sciarratta, M., & Zoccarato, P. (2022). Sub-Decimeter Onboard Orbit Determination of LEO Satellites Using SSR Corrections: A Galileo-Based Case Study for the Sentinel-6A Satellite. Remote Sensing, 14(23), 6121. https://doi.org/10.3390/rs14236121