1. Introduction
Ground-penetrating radar (GPR) is a popular nondestructive testing technique for target detection and imaging in many fields, such as engineering detection [
1], ground ice detection [
2], and criminal investigations [
3]. However, GPR is limited by its huge platform like vehicle-mounted radar, so it cannot work with high efficiency in complex and dangerous environments. In recent years, unmanned aerial vehicle (UAVs) with their lightweight and remote-controlled characteristics have been the focus of increasing interest in military and civilian applications [
4,
5,
6,
7]. A significant advantage of UAVs is that they can fly over large areas which are difficult for humans to reach directly [
8]. In addition, the accurate positioning technique and automatic flight mode can achieve higher accuracy and efficiency. Therefore, unmanned aerial vehicle (UAV)-mounted GPR for target detection is a promising field of research.
However, for the UAV-GPR system, the accurate interpretation of radar echo is a big challenge due to the impact of background signal or clutter, the electromagnetic interference in environment, the rotor interference of UAV and so on. When background signals or interference of various kinds is stronger than the useful radar echo, it is easy to be misjudged as the target. To remove the background signal and the interference, many researchers have studied the methods about the radar signal processing. An improved method of background and clutter reduction is proposed to highlight the echo of the target by adopting a background window [
9]. Mohamed has also proposed a background-removal method by creating a background matrix for GPR data obtained in a relatively flat terrain [
10]. Although researchers have studied some effective methods of GPR data processing, there has been little discussion about the low-frequency UAV-mounted GPR on removing the background clutter when working in a complex and changing environment [
11,
12,
13,
14,
15].
GPR detection faces many challenges in the actual environment. To improve the penetration of the radar, lower frequency ultra-wideband signals are needed. However, this will lead to an increase in antenna size and vulnerability to electromagnetic interference in the environment. In addition, there will be a great deal of clutter in the complex underground environment. Many theories have studied how to eliminate clutter interference to images, such as mean subtraction methods [
16], singular value decomposition (SVD) [
17], and principal component analysis (PCA) [
18]. However, these algorithms are mainly applicable to even and flat terrain, but not fully suitable for UAV ground-penetrating radar. The reason is that the rotor interference of UAV and space electromagnetic interference will make the above methods ineffective.
In this paper, we have developed a low-frequency UAV-GPR system, which includes a hardware system and an algorithm-processing system, which will be described in detail in the following chapters.
First, the structure of the UAV-GPR system, the waveform of the transmitted signal, and the experimental principle are introduced. The system adopts ultra-wideband VHF antennas to transmit narrow-band pulses, and the radar echoes are acquired through a data collector and self-developed acquisition program. The bandwidth of the antenna and the waveform of the received signal are further measured through experiments.
Secondly, the CCBS method is proposed by calculating the cross-correlation between each A−Scan signal and a reference wave, and the size of cross-correlation indicates the degree of similarity. Here, the reference wave is defined as a single echo when there is no target underground. If the value of cross-correlation is large (close to 1), it indicates that the radar echo is similar to the reference wave. That is, the reference wave can be regarded as the background signal to a higher degree. On the contrary, if the value of cross-correlation is small (close to 0), it indicates that the radar echo is similar to the mean signal of all A−Scan echoes in the azimuth dimension, which can be largely considered as the background clutter. The background clutter mentioned in this work includes signals in areas of no interest, antenna direct-coupling waves, ground reflection waves, periodic electromagnetic interference signals, etc. Attentive to the abovementioned considerations, a background removal model is built by weighting the reference wave and the mean signal. In this way, the background signal can be removed effectively. Moreover, a Butterworth filter is used to remove some active electromagnetic interference, which is beyond working frequency of the system. The Doppler shift phenomenon would appear due to the relative motion between radar module and UAV rotors, which makes the received echo appear as a high-frequency component in the Doppler domain, so as to obtain cleaner echo data [
19]. The pulse repetition frequency (PRF) in the Doppler domain is 3 Hz. To remove the rotor interference as much as possible, the cut-off frequency of the lateral Doppler filter needs to be slightly higher than the PRF in the Doppler domain. Then, the gain processing technique is used to increase the amplitude of weak echo from the target in deep position.
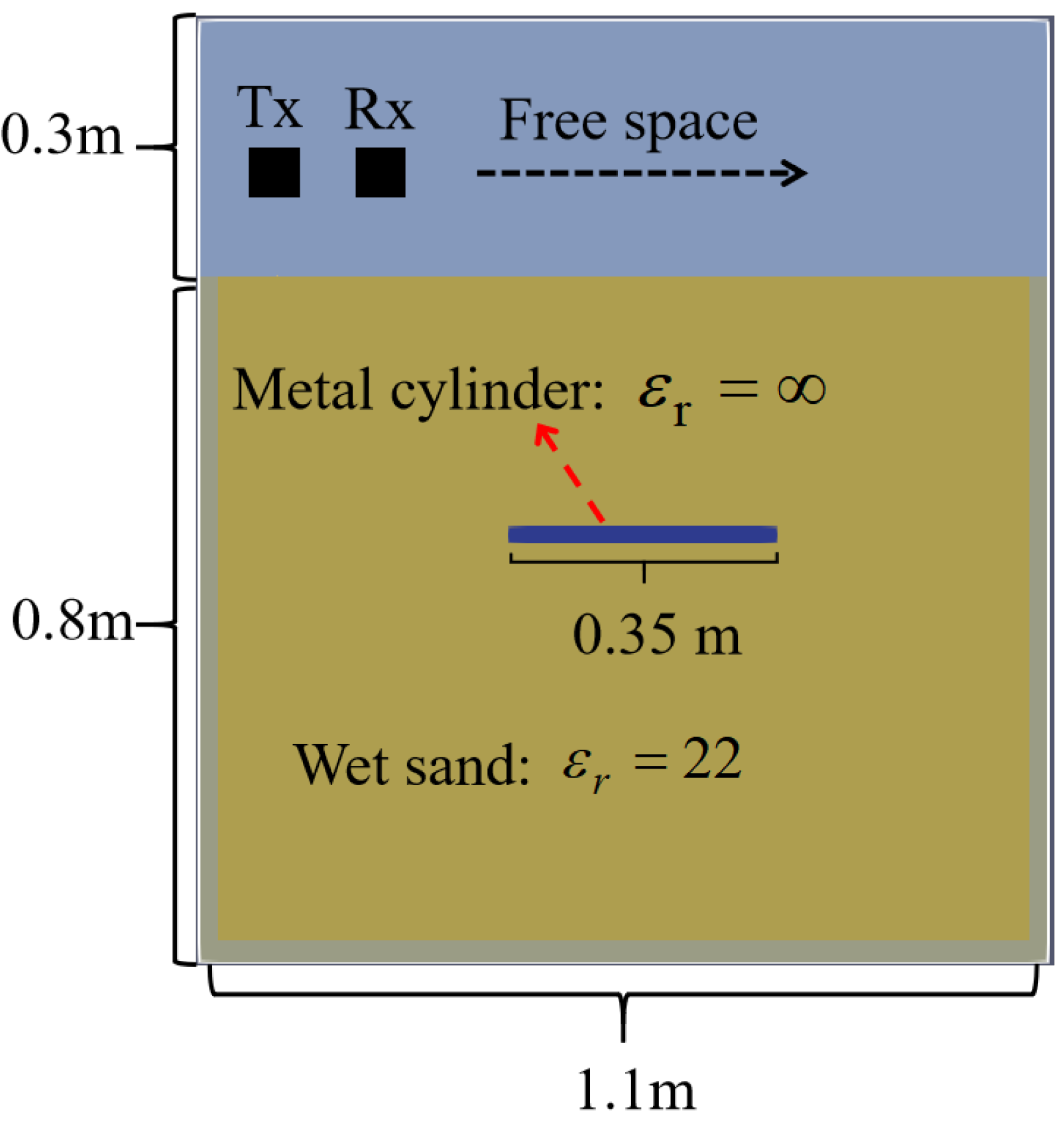
Thirdly, a calibration method is introduced through the measured radar data in two kinds of mediums to estimate the dielectric constant. Both simulations and experiments are conducted in 150 MHz–309 MHz band. The simulations were performed on the gprMax v.3.0.0 platform [
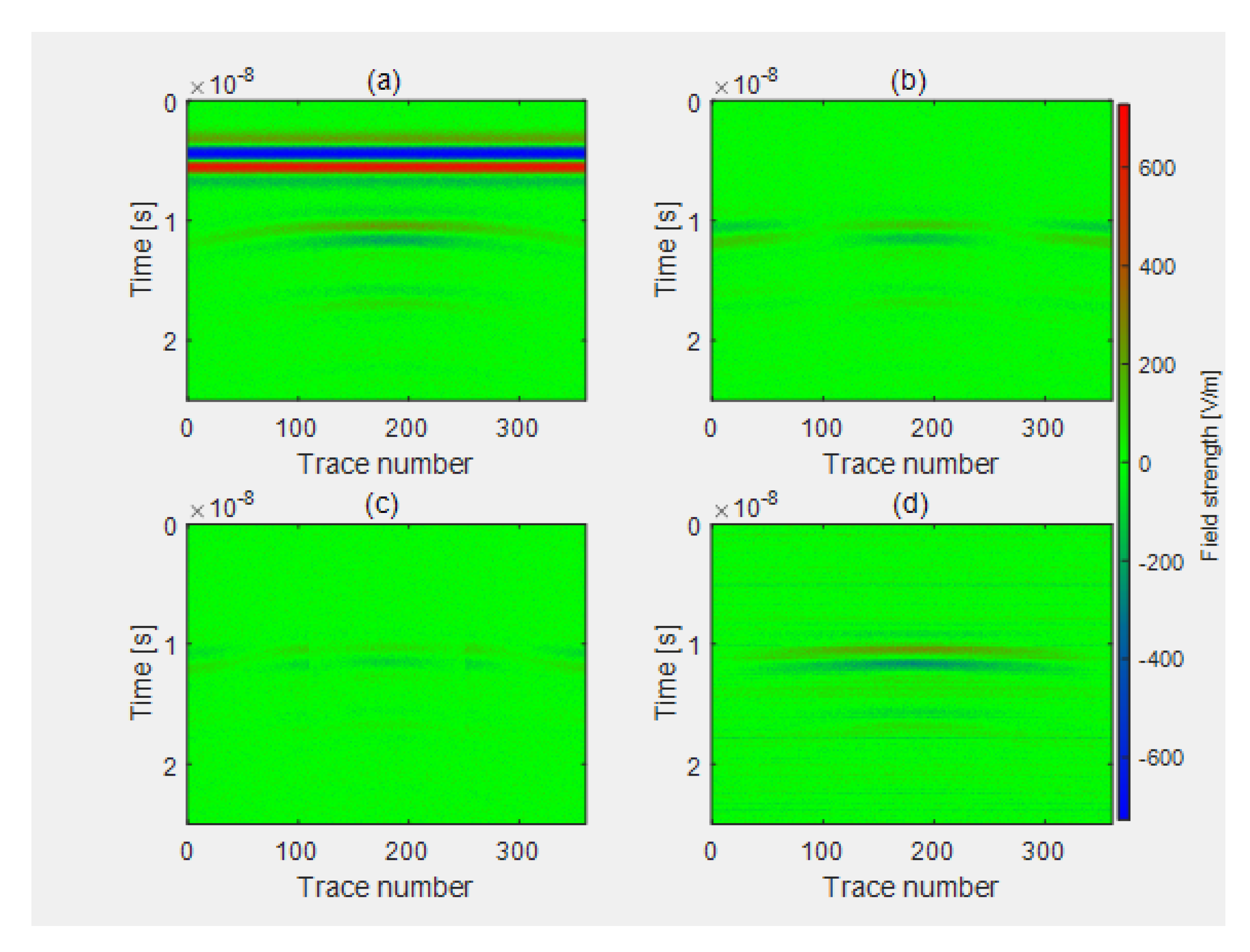
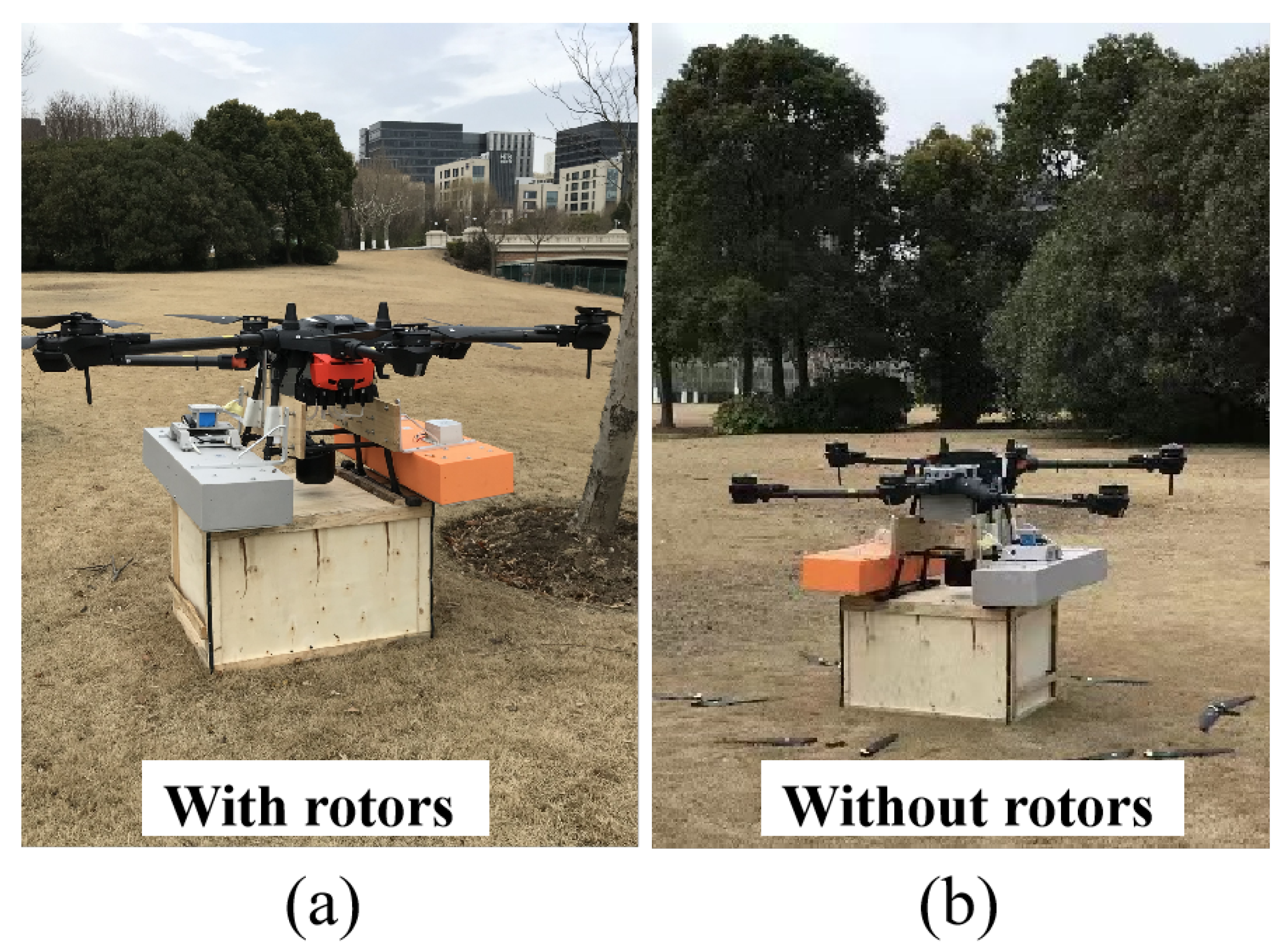
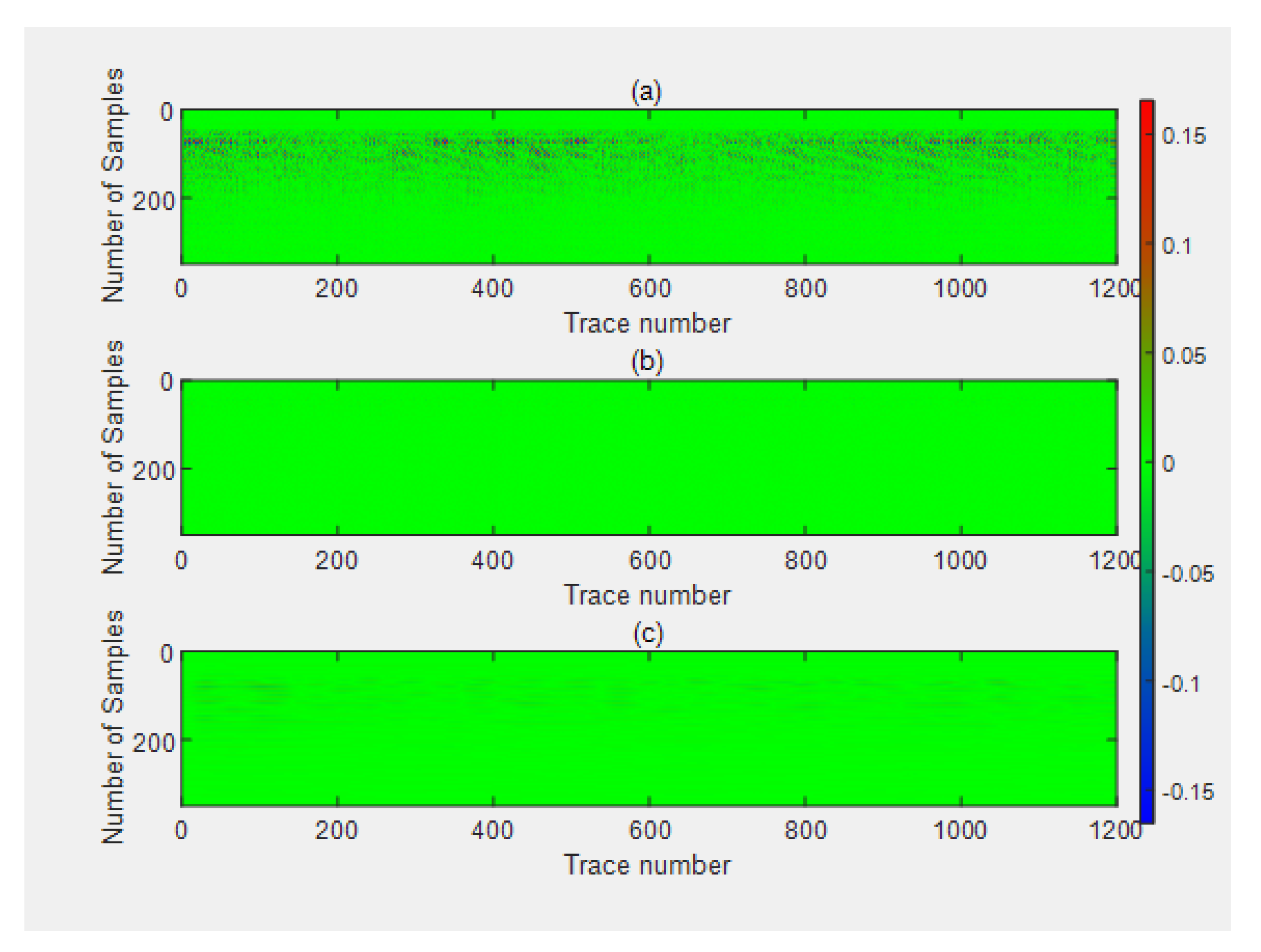
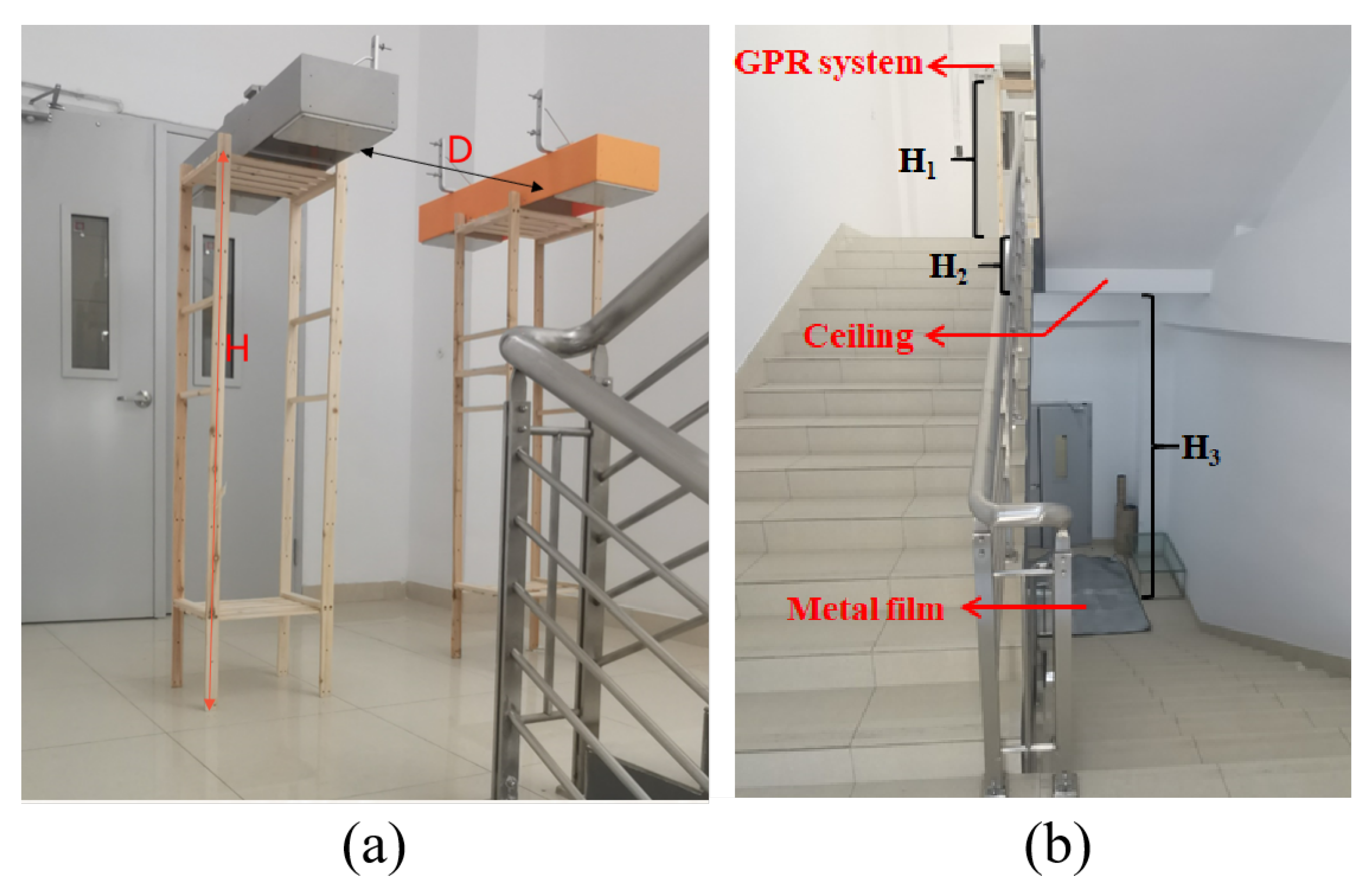
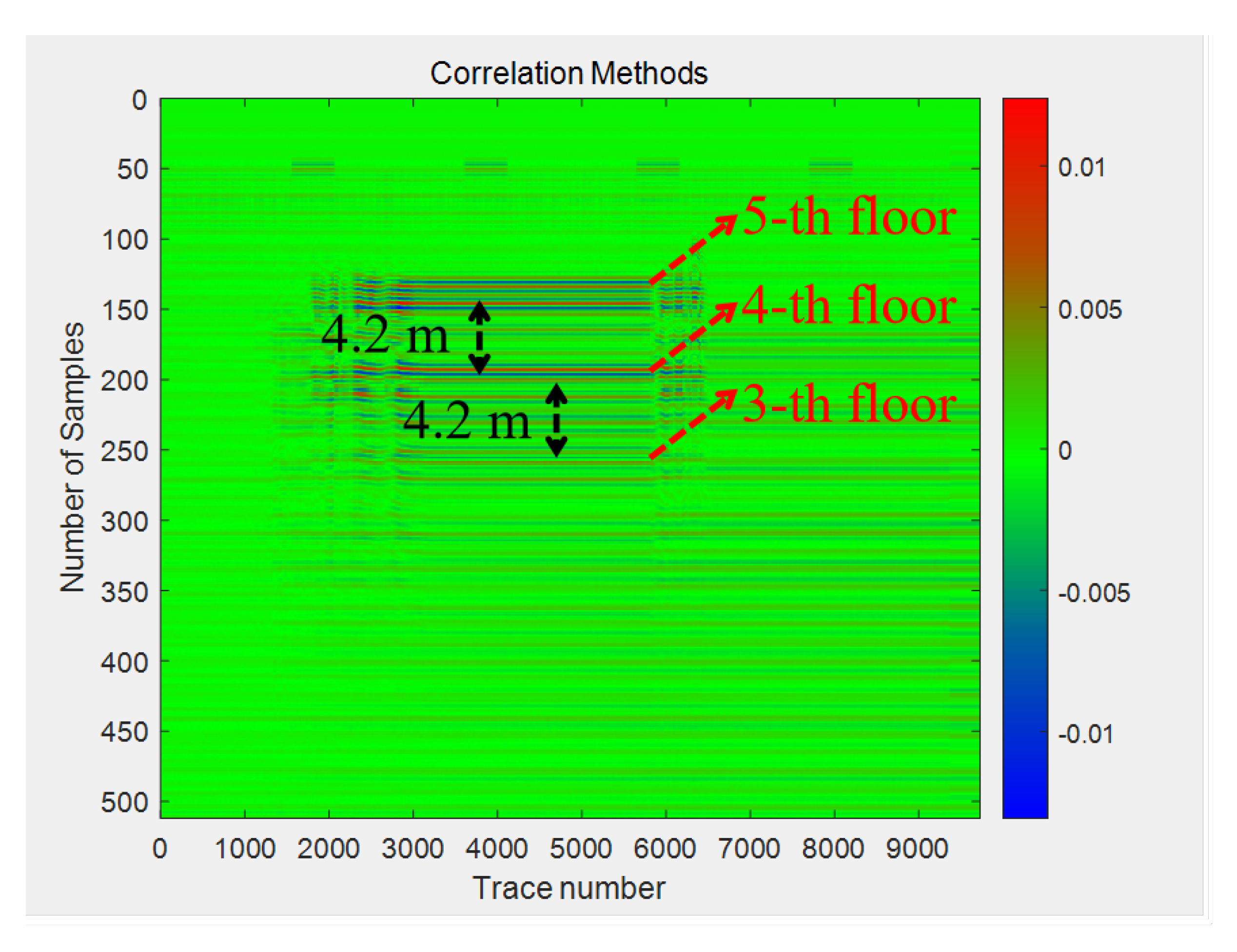
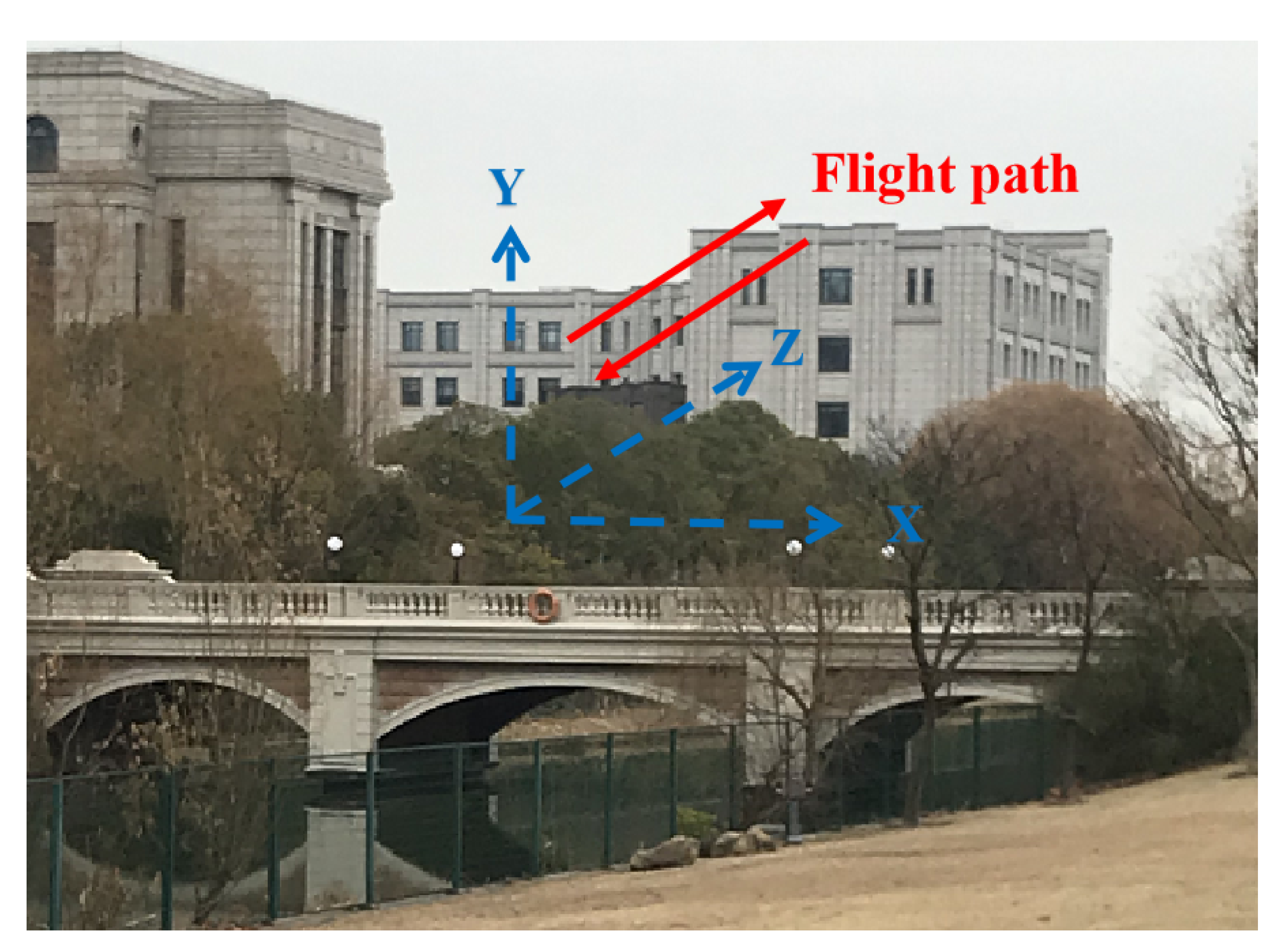
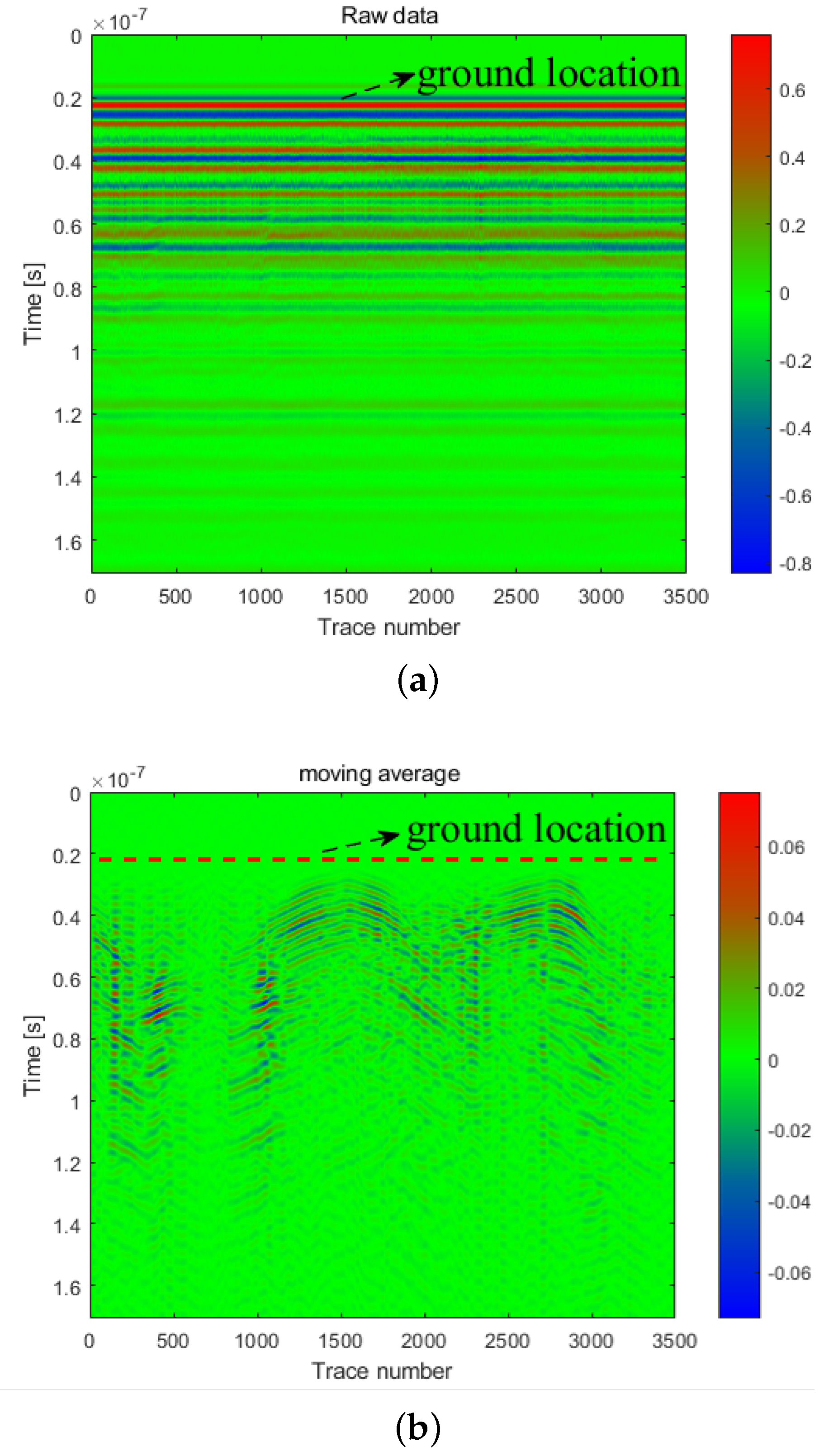
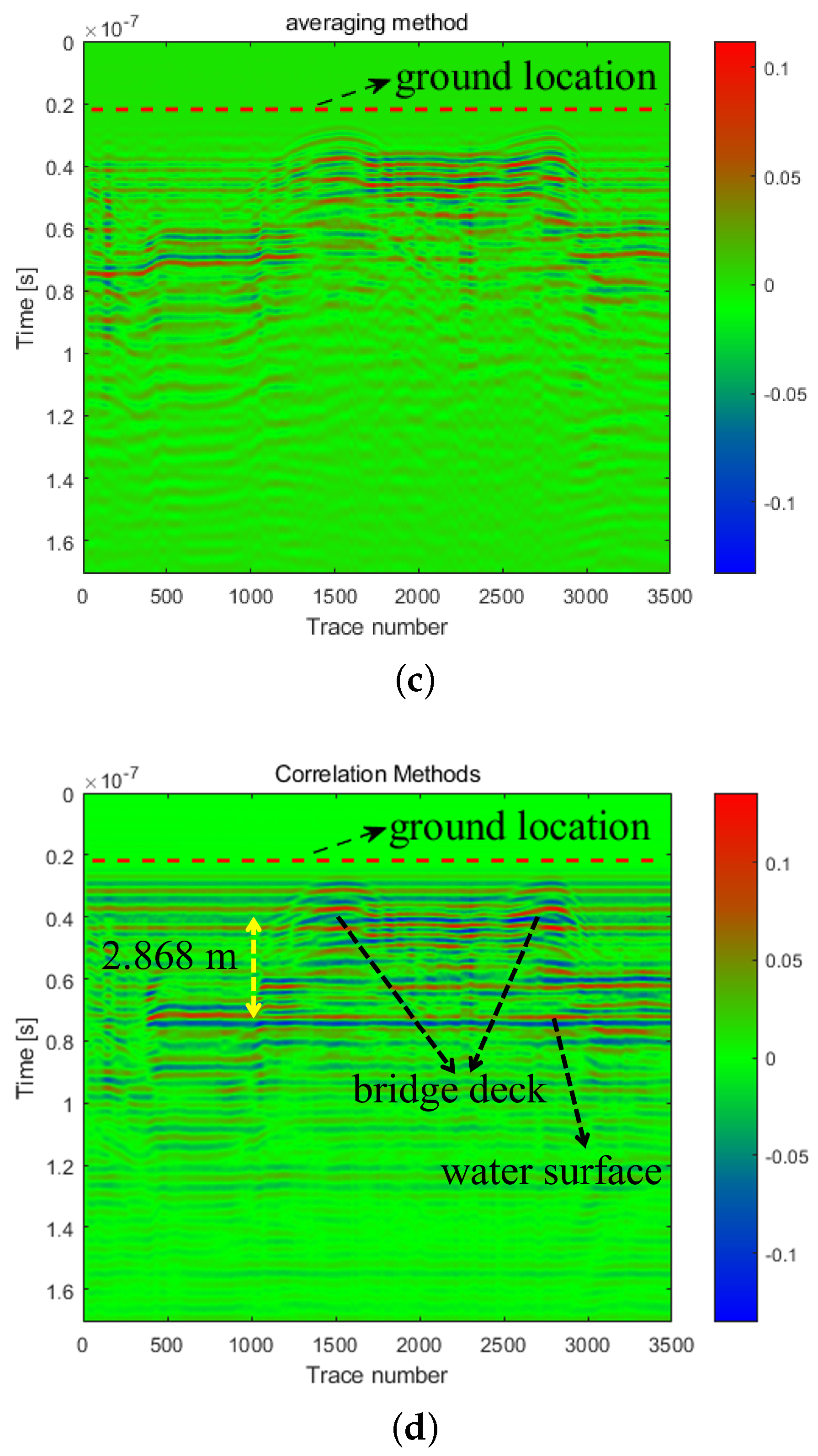
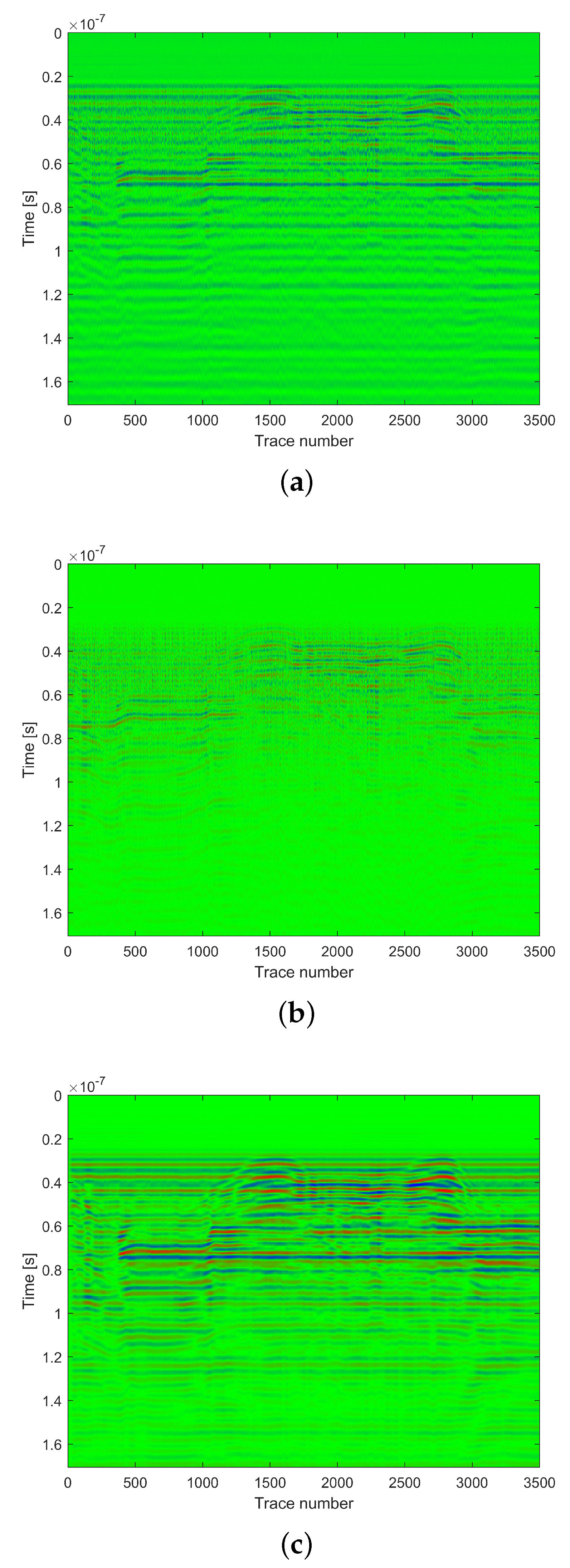
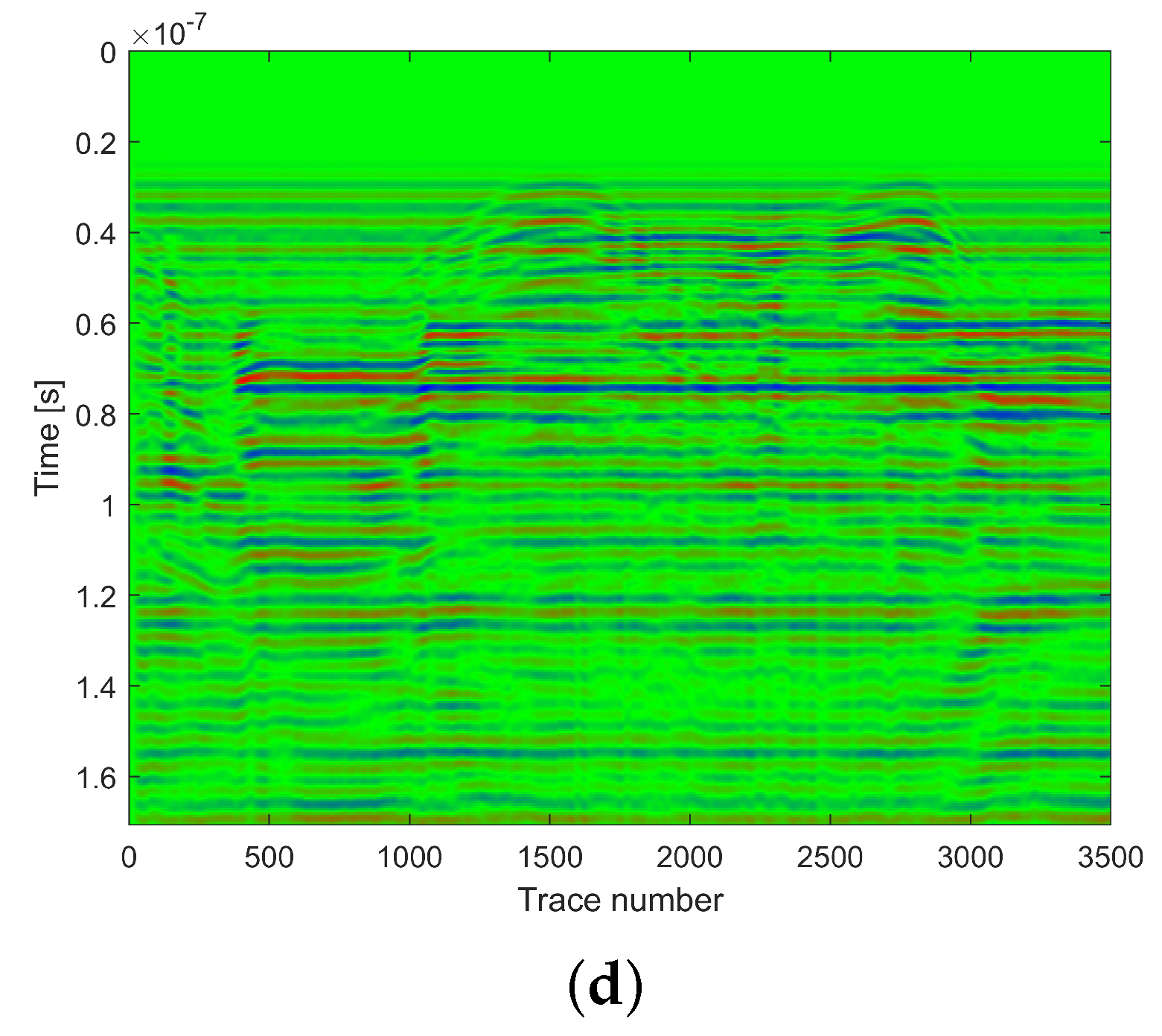
20]. To illustrate the principle of UAV rotor interference, we carried out the comparative tests on an empty lawn and analyzed the source of interference. Furthermore, one floor experiment was conducted to verify the penetrability of the radar module. The simulated and experimental data was processed by the mean subtraction method, the moving average method, and the proposed method. Both the simulations and experiments have shown the effectiveness of the proposed method, and the performance of our UAV-GPR system for target detection is also proven.
This paper is organized as follows. The UAV-GPR system is introduced in
Section 2. In
Section 3, the detailed signal processing method is described. In
Section 4, a calibration method of measured radar data is introduced to estimate the dielectric constant. In
Section 5, the simulations and experiments are performed to demonstrate the effectiveness of the proposed method and the performance of our system. Finally, a conclusion is drawn in
Section 6.
2. UAV-Mounted GPR System
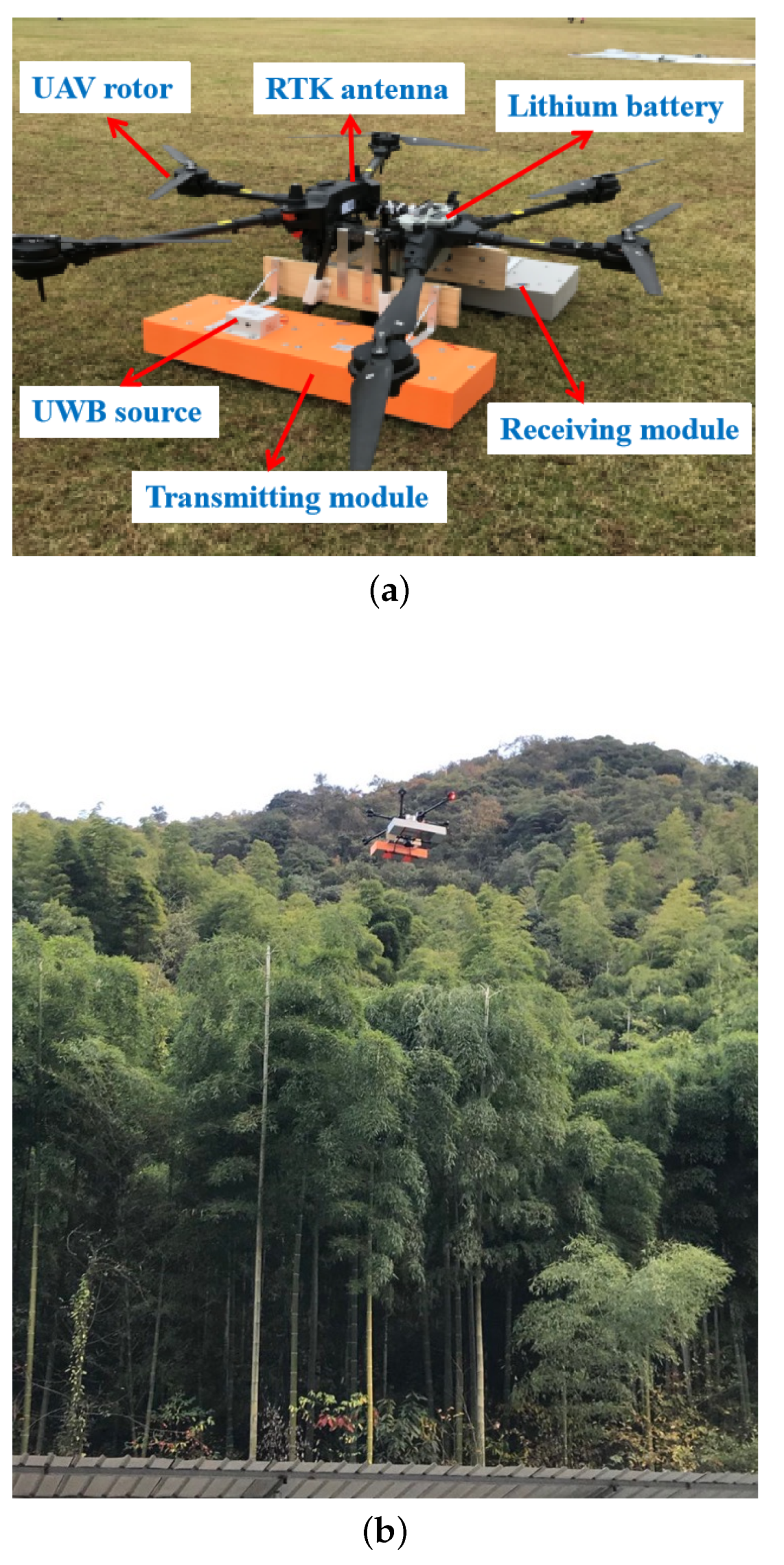
The UAV-mounted GPR system contains four modules: a UAV platform, radar transceiver module, data acquisition module, and signal processing module, as shown in
Figure 1. The UAV platform is a modified DJI T20 drone with six high-speed rotors and RTK antenna, which can carry a payload up to 30 kg and fly at the speeds of 30 km/h. The radar transceiver module includes the transmitting module and receiving module. The transmitting module is composed of a narrowband pulse signal generator and the antennas. The pulse repetition frequency (PRF) of the radar system in the longitudinal time domain is 20 GHz. Both the transmitting and receiving modules contain three ultra-wideband VHF band antennas, and its purpose is to increase the power of the signal and improve the penetration ability. The frequency band of the pulse is 150 MHz–309 MHz. The data acquisition module is composed of a microcomputer, a WiFi router, a remote-controlled minicomputer, and a data collector equipped with a high-speed acquisition program. The signal processing and image display modules mainly aim at removing the background signal, low-frequency active electromagnetic interference, and the rotor interference of UAV. The purpose is to show an underground map including the detected target clearly and to cut down the false alarm rate.
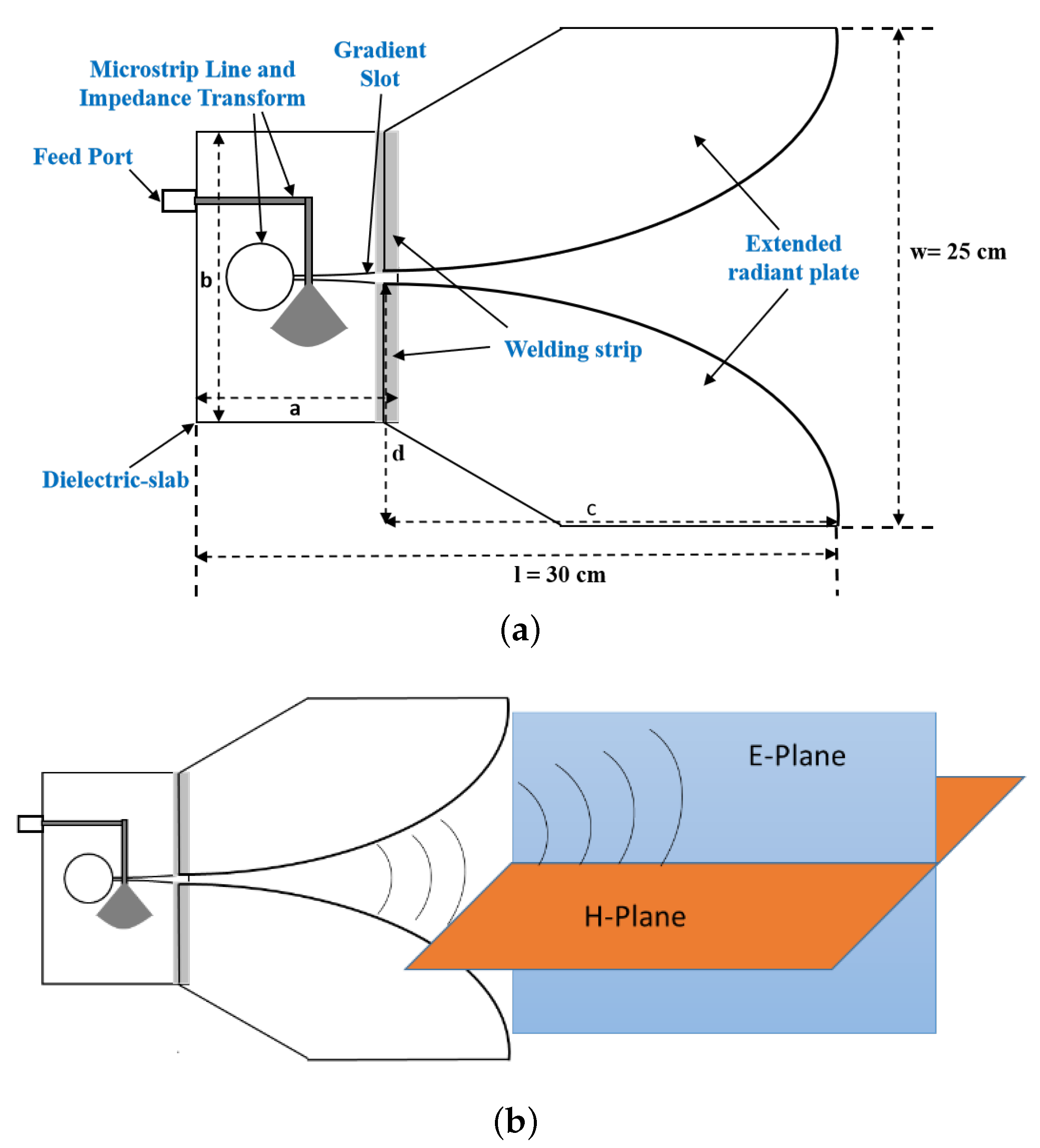
Considering factors of size, gravity, and bandwidth, we chose the ultra-wideband Vivaldi antenna for better penetration. The Vivaldi antenna radiates electromagnetic waves of different frequencies through a tapered line structure, which is a kind of tapered slot antenna. A narrow slot radiates high-frequency components, and a wide slot radiates low-frequency components. The structure of the antenna is shown in
Figure 2a, with the total length of 30 cm and the total width of 25 cm. Specifically, the length and width of the dielectric slab are 10 cm and 6 cm, and the long and short sides of the extended radiation plate are 24 cm and 12.5 cm. The feeding network is implemented with a balun which transforms the unbalanced signal from the coaxial cable to a balanced signal at the beginning of the flares. It is based on a tapered microstrip line from 50
to 100
, followed by another 100
line which leads to a radial stub. The microstrip-to-slot transition is formed by the radial stub and a circular cavity. The Vivaldi antenna is a single-polarized antenna. The electric field plane is parallel to the antenna plane, and the magnetic field plane is perpendicular to it. The radiation structure of the antenna is shown in
Figure 2b.
In order to obtain a better resolution and wide band, we use a second-order Gaussian pulse as the transmitted signal. The expression of Gaussian pulse is as follows,
where
a is the pulse influence factor, which determines the width of the pulse, and
is the amplitude of the pulse, which determines the energy of the pulse. Then, the second-order differential of the Gaussian pulse is calculated to get the second-order Gaussian pulse as follows:
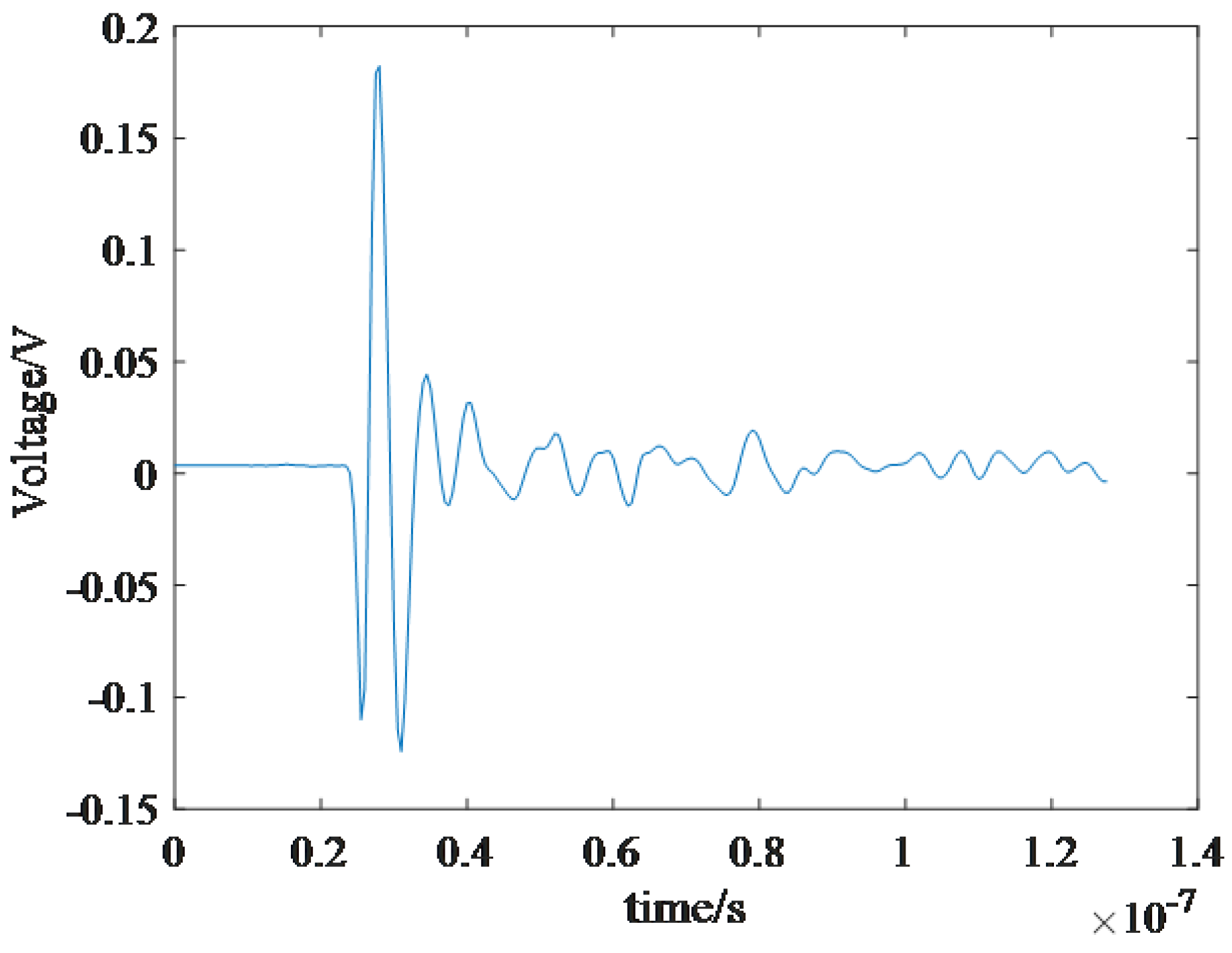
We adopt an avalanche transistor cascade circuit to generate this signal, and the transceiver antenna is used to test the stability of the radiated signal. Here we test a transmitting pulse signal, and the receiving signal is drawn in
Figure 3. The signal is consistent with the designed parameters. However, due to the incomplete matching of the antenna and the air and the interference in the environment, the signal has some redundant tails, but this does not affect the test performance of system.
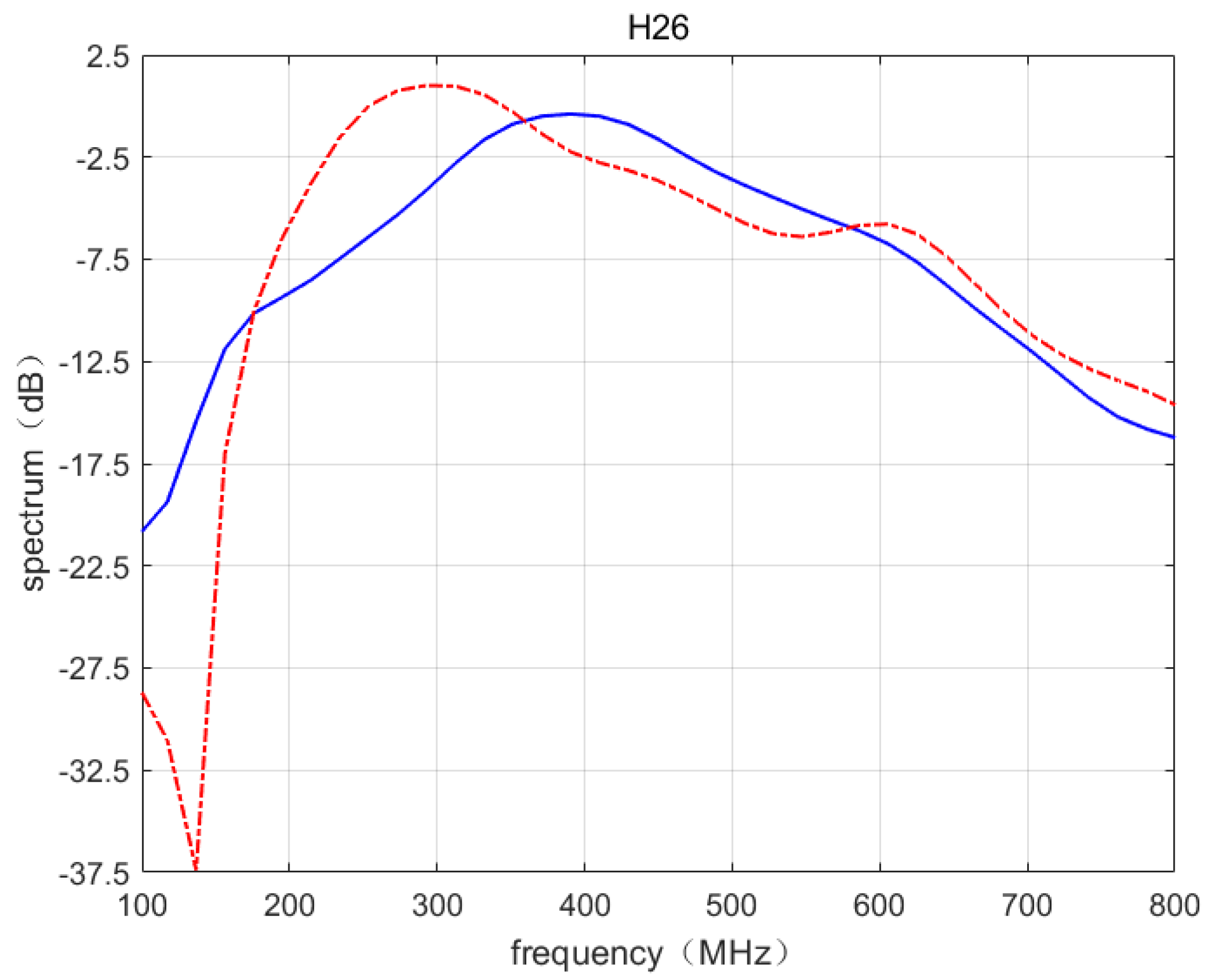
In order to measure the radiation spectrum of the antenna, we conducted the comparative experiments. We measured the frequency spectrum of the transmitted signal directly. Then, some absorbing material is pasted on the back of the antenna, and the received signal is tested. The test results are shown in
Figure 4. From the figure, we can see that the bandwidth of the transmitted signal is 159 MHz (from 150 MHz to 309 MHz). The red line represents the spectrum without the absorbing material, and the blue line represents the spectrum after adding the absorbing material on the back of the antenna. It can be seen that the radiation performance of the antenna is good, and can meet the experimental requirements.
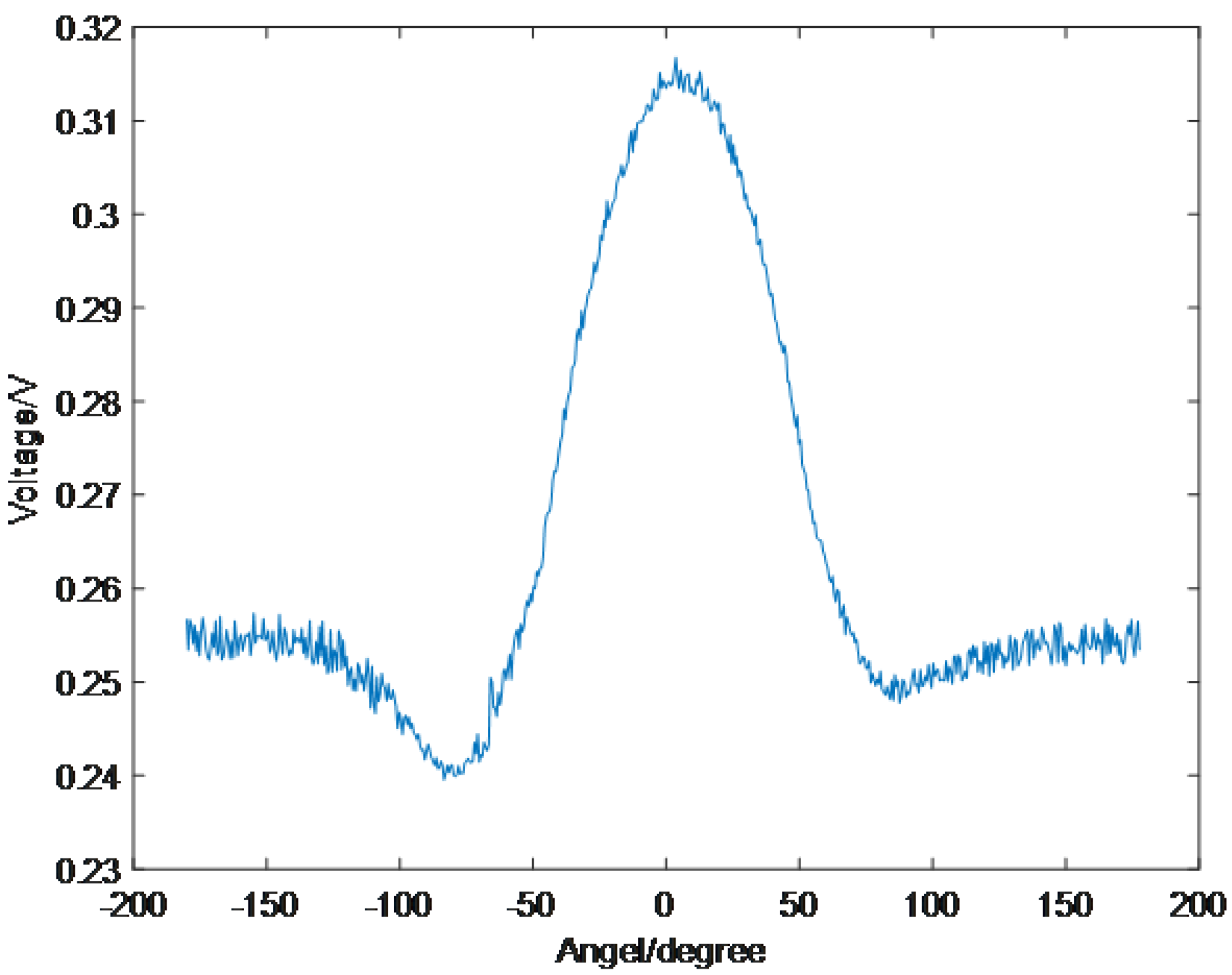
The antenna pattern of UAV-GPR is implemented by testing signal strength in different directions. The main lobe direction of the antenna is
, and the radiation characteristics of the antenna are tested in the range of
. The test results are shown in
Figure 5. It can be seen that the antenna has good directivity and that the main lobe lies in the position of
, which has the maximum radiation power.
The UAV-GPR system has characteristics of deep penetration ability, good stability, small size, light weight, etc. Moreover, the transmitting module, receiving module, data collector and microcomputer are integrated with polylactic acid (PLA) materials printed by 3-D printer, which are portable for the system integration. It can be seen that the penetrability and the requirements of system miniaturization are both considered.
3. Signal Processing Method
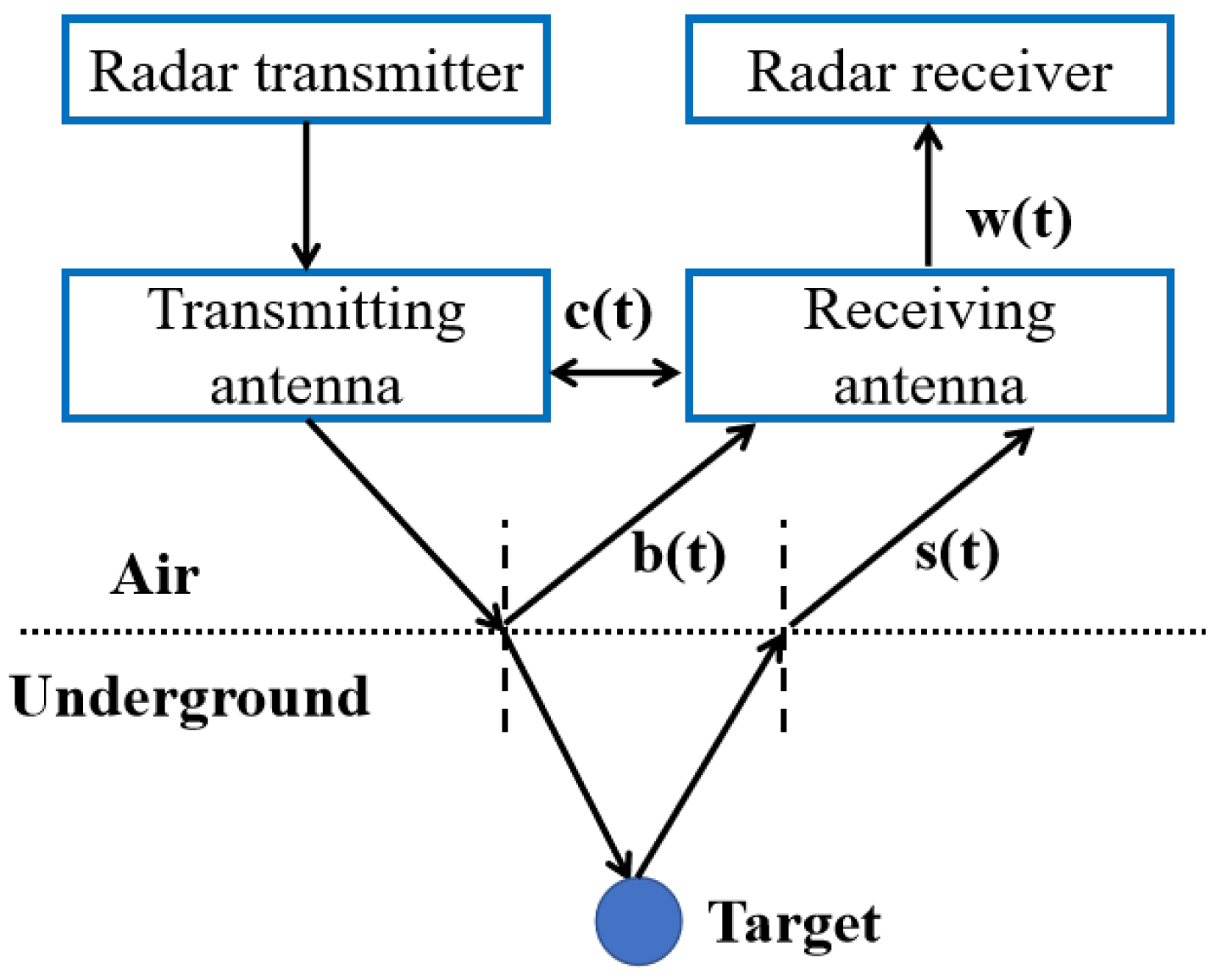
The schematic diagram of the UAV-GPR system is shown as
Figure 6. The transmitting antenna transmits the narrow pulse signal underground constantly, and the sampling rate of the pulse is 2 GHz. When the permittivity or conductivity are discontinuous, the pulse signal would be strongly reflected by the interfaces of different medium. The received echo has a delay relative to the transmitted signal, which can be applied to calculate the information of the target depth by combining the dielectric constant. A single radar echo
received in height dimension is usually referred to as the A−Scan, which is mainly composed of direct coupled wave between transmitter and receiver
, direct reflected wave from the ground
, the echo of the underground target
, and the noise in the environment
. Thus, the total expression of the received echo can be written as
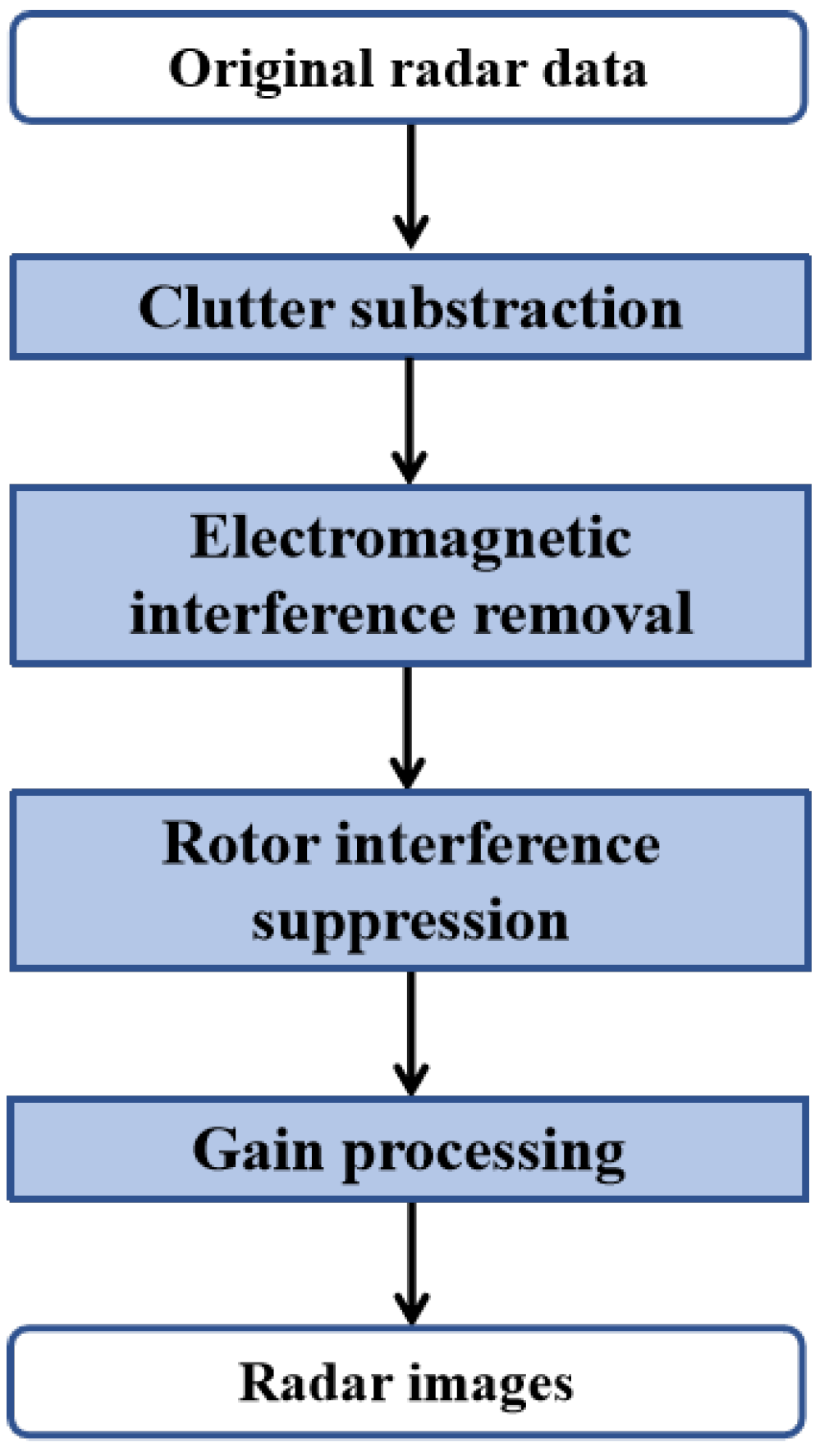
The signal processing step is pivotal for the UAV-GPR data interpretation. As the depth increases, the energy of radar echo will be attenuated in the medium rapidly and then the amplitude of target echo is smaller than that of background signal or interference. Consequently, the motivation of signal processing is to reduce the impact of the background and the interference. In this way, the map of the underground is presented intuitively, and the signal-to-clutter ratio (SCR) of the system can also be improved. In addition, a gain processing technique is adopted to amplify the weak signal for identifying the target located deep underground. The signal processing is extremely important for obtaining the useful information of targets and reducing the false alarm rate, and its diagram is shown in
Figure 7.
3.1. Cross-Correlation-Based Background Subtraction Method
For the background signal removal, there are several classical methods; for instance, mean subtraction method [
21], moving average background removal method [
9,
22], SVD-based background removal method [
23], the wavelet-based method [
24], and so on. Among them, the mean subtraction method is one of the prevalent methods. Assume that the number of samples in one A−Scan is M,
B indexes the raw radar echo composed of N A−Scans, and
indexes the processed echo after background subtraction, and we have
where
i is the index of A−Scan in the azimuth dimension, and
j is the index of samples in the height dimension.
The essence of the mean subtraction method is that each A−Scan echo is subtracted by the mean signal of all A-Scan echoes in the azimuth dimension. In general, this method can work well when the test terrain is flat and the background changes very little. However, the test environment in practical applications may be complex or constantly changing. In this situation, the echo may be mixed with varying background, and the mean subtraction method may not suppress the background signal well. In addition, if a reference wave is subtracted by each A−Scan separately, the background can be removed to some extent, but the additional signal will be brought in when the background in the air changes. Therefore, we propose a new cross-correlation-based background subtraction (CCBS) method to alleviate this problem by considering the mean signal and a reference wave simultaneously. The proposed method includes three steps. First, a reference wave is defined as the single A-Scan echo when there is no target underground, denoted as
. Secondly, the similarity of each A-Scan and the reference wave
is obtained by calculating the cross-correlation coefficient, which is expressed as follows,
where
indexes an A−Scan echo in the azimuth dimension,
t is the sampling time, and
is the intermediate variable. The values of
range from 0 to 1. Then, to highlight the differences of echoes, a weighting factor is introduced through the Gaussian function, as shown below:
To make sure that the weighting factor
H increases with the increasing of
X, the value of
is set to 1. The parameter
determines the rate of increase; here,
is set as 0.5. Finally, a background subtraction model is proposed by weighting the reference wave and the mean of signals in the azimuth dimension. The weighting factors are
H and
, respectively, and the processed echo is expressed as
When the cross-correlation coefficient of an A−Scan echo and the reference wave H is close to 1, i.e., the echo is similar to the reference wave, we take H as the weighting factor for the reference wave. In this case, the value of H is greater than 1 − H. On the other hand, when the cross-correlation coefficient is close to 0, it indicates that the echo is not similar to the reference wave, so we take 1 − H as the weighting factor of the mean of signals. Here, the value of 1 − H is greater than H. The method takes into account the change of the environment by analyzing the similarity between each received echo and reference wave. By this method, the background signal can mostly be removed.
3.2. Interference Suppression Technique
Our system works at the frequency band from 150 MHz to 309 MHz. If there is a strong electromagnetic interference in the environment, such as that caused by broadcast signals, it is difficult to distinguish the useful echo and interference, and the results may be misjudged. Therefore, we adopted a Butterworth filter to each A−Scan of radar echo after removing the background signal. The frequency band of lower-limit cutoff of the filter is 140–150 MHz, and the upper-limit cutoff of the filter is 310–320 MHz. By this filtering operation, the electromagnetic interference can be basically removed.
Moreover, when the UAV-GPR system is flying, the rotor interference is very serious. As for the source of rotor interference, both the rotor itself and the control motor need to be considered. On the one hand, the high-speed rotation of the rotor can be viewed as a moving target relative to the transceiver module. This regular change of environment may cause the echo in the azimuth dimension to contain non-low-frequency components. On the other hand, the alternating current that controls the motor may generate the magnetic field, which may bring in the extra electromagnetic interference. To explain the interference, we carry out a series of comparative tests, which will be described in the following part.
4. Dielectric Constant Estimation
There are many methods by which to estimate the dielectric constant, such as the Dobson semi-empirical model [
25] and the Hallikainen empirical model [
26]. Among them, a practical method is the calibration method. This method is based on the GPR-measured data. According to the permittivity of one medium, the reflection coefficient of the medium is obtained, and then the permittivity of the other medium is calculated.
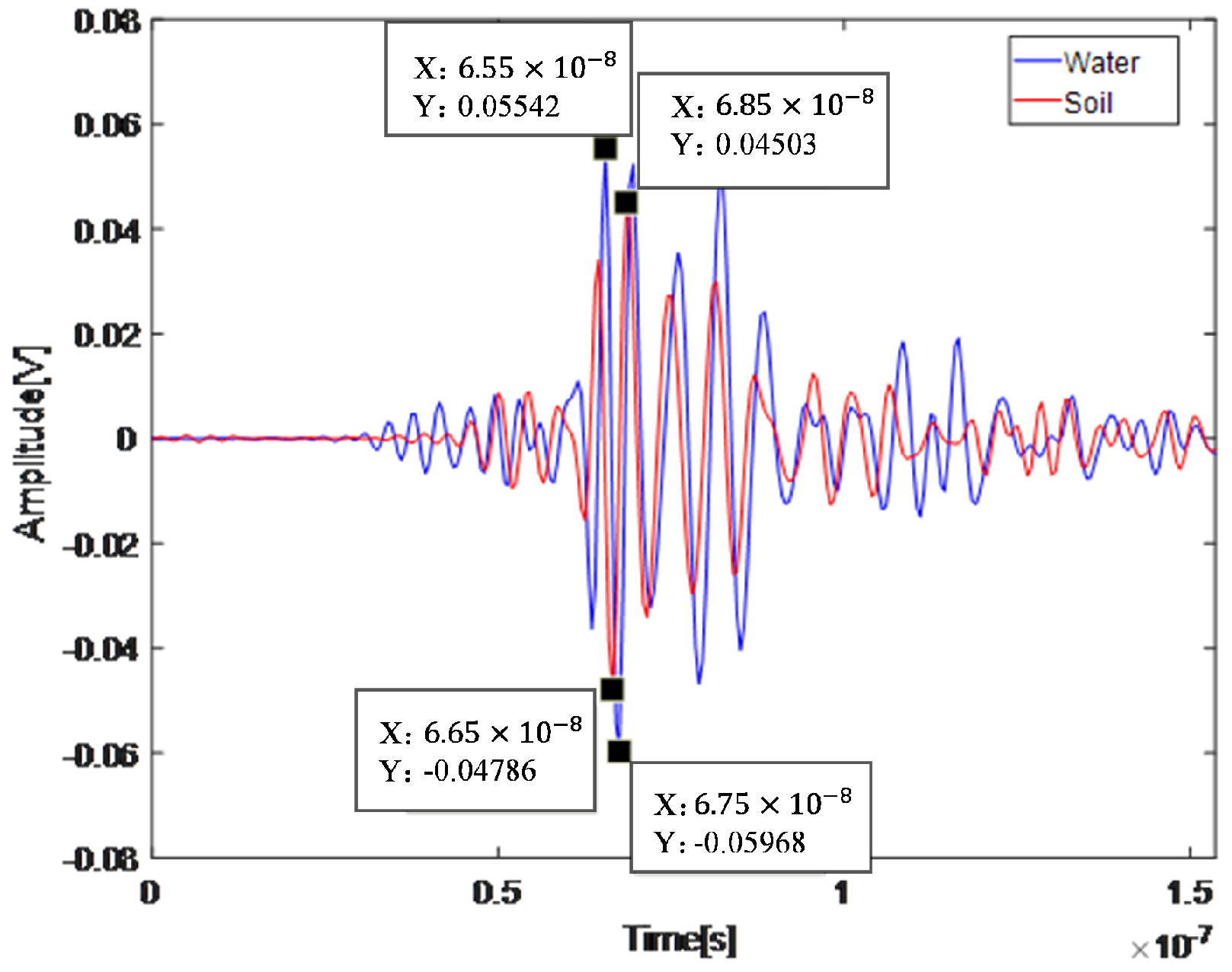
The amplitude of the echo varies greatly at different heights. In the experiment, the echo of two different mediums by the UAV-GPR system at the same height are selected to calculate the dielectric constant. Before calculating the dielectric constant, the obtained radar data need to go through the signal processing step, i.e., background subtraction and interference suppression. The A−Scan of water and soil is shown in
Figure 8, and the calculation process is as follows.
The electromagnetic wave generates reflection at the interface of two different mediums, and the reflection coefficient is expressed as
where
represents the dielectric constant of the first medium, and
represents the dielectric constant of the second medium.
In general, the air is the first medium, whose dielectric constant is 1. Thus, Equation (
8) can be rewritten as
The second medium is the other medium. First, we regard water as the calibration medium and receive the radar echo from water surface, and its dielectric constant of water is about 80 [
26]. Then, the value of the reflection coefficient can be estimated from the maximum and minimum peaks of the radar echo. Let
and
index the maximum peak and minimum peak of the echo from water surface, and
and
index the maximum peak and minimum peak of the ideal echo. Then, the reflection coefficient can be calculated as
where
indexes the dielectric constant of water,
and
are the maximum peak and minimum peak of the echo from water surface, respectively, and
indexes the absolute value.
Secondly, we calculated the reflectance coefficient of soil, shown as follows:
Thus, according to Equations (
9) and (
11), the dielectric constant of soil can be obtained as shown below:
Through the above analysis and calculation, the dielectric constant of the soil is 20.8. In addition, the Dobson semi-empirical model introduces the relationship between the dielectric constant and soil moisture [
27]. By our calculation, the measured moisture of the soil is 27%, and the dielectric constant is approximately 21. It can be seen that the value of dielectric constant can be estimated through the calibration method of measured radar data.
6. Conclusions
In this paper, we have developed a UAV-GPR system with miniaturization and penetrability. This system has the advantages of independent detection and data processing integration. Based on the system, a new CCBS method is proposed, and an interference suppression technique is adopted in the signal processing step. The proposed CCBS method takes advantage of the similarity between each A−Scan echo and a reference wave by establishing a background-removal model. Moreover, we have explored the effects of the electromagnetic interference in the environment, and the interference from the UAV rotor itself by practical testing. An LDF technique was adopted to effectively suppress the active interferences. In addition, a calibration method for measured data was introduced to calculate the dielectric constant of the measured medium. As a result, the simulations and experimental results indicated that the proposed method in terms of clutter subtraction has better performance than the traditional methods, and the penetrability of the UAV-GPR system was also validated. In this paper, experiments carried out in different scenarios provided meaningful reference for future research. However, the research of UAV-GPR still faces many challenges, such as environmental interference, signal attenuation, miniaturization, and security, which will be the subject of our next research article.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}