
Aerial Imagery Paddy Seedlings Inspection Using Deep Learning



Abstract
:
1. Introduction
2. Related Work
3. Study Area, Materials, and Methods
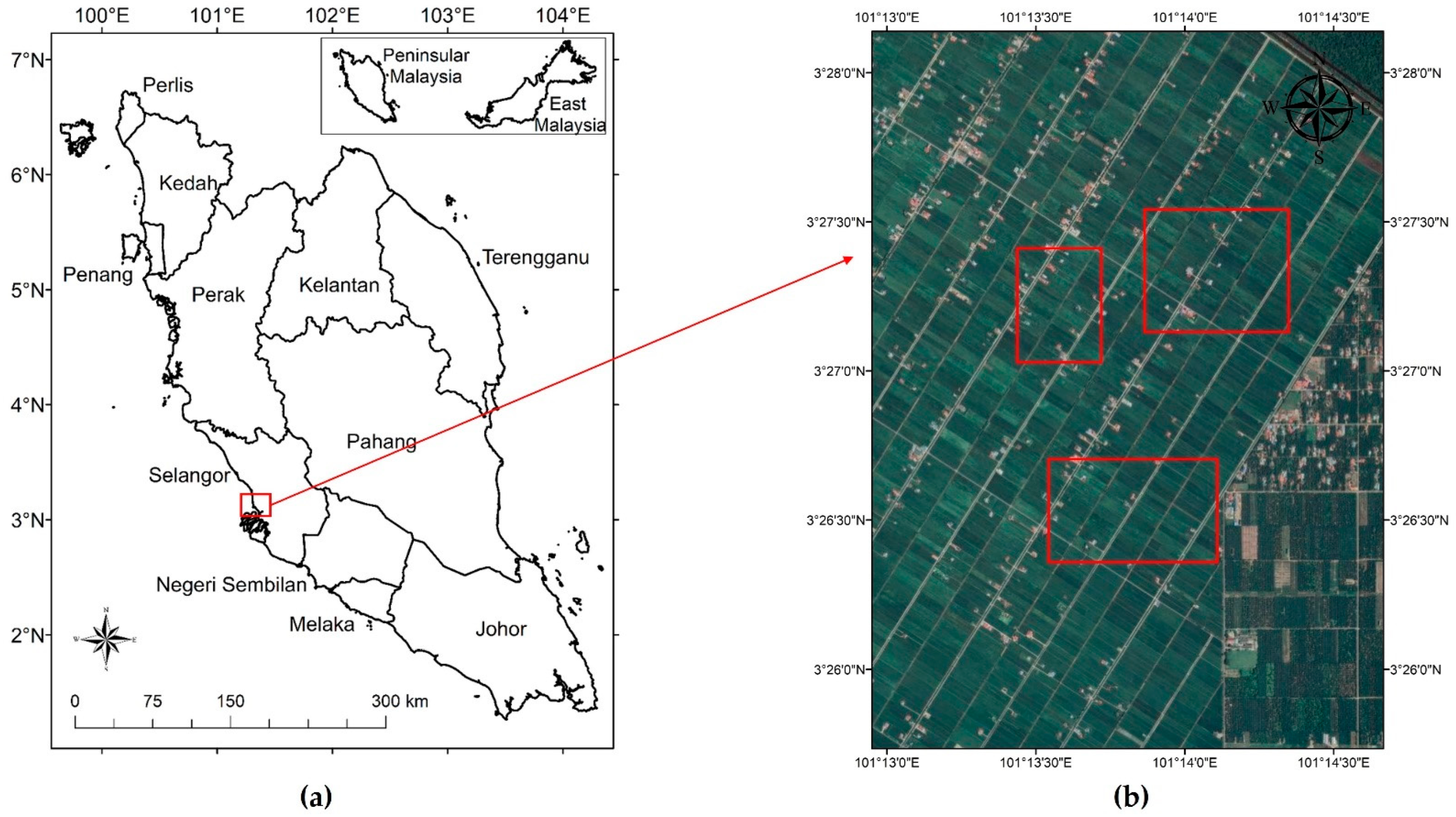
3.1. Study Area and Image Acquisition
| Sensors | 1/2.3 CMOS Effective pixels: 12.4 M |
| Lens | FOV 94° 20 mm (35 mm format equivalent) f/2.8 focus at ∞ |
| ISO Range | 100–320 (Video) 100–1600 (Photo) |
| Electronic Shutter Speed | 8–1/8000 s |
| Image Size | 4000 × 3000 |
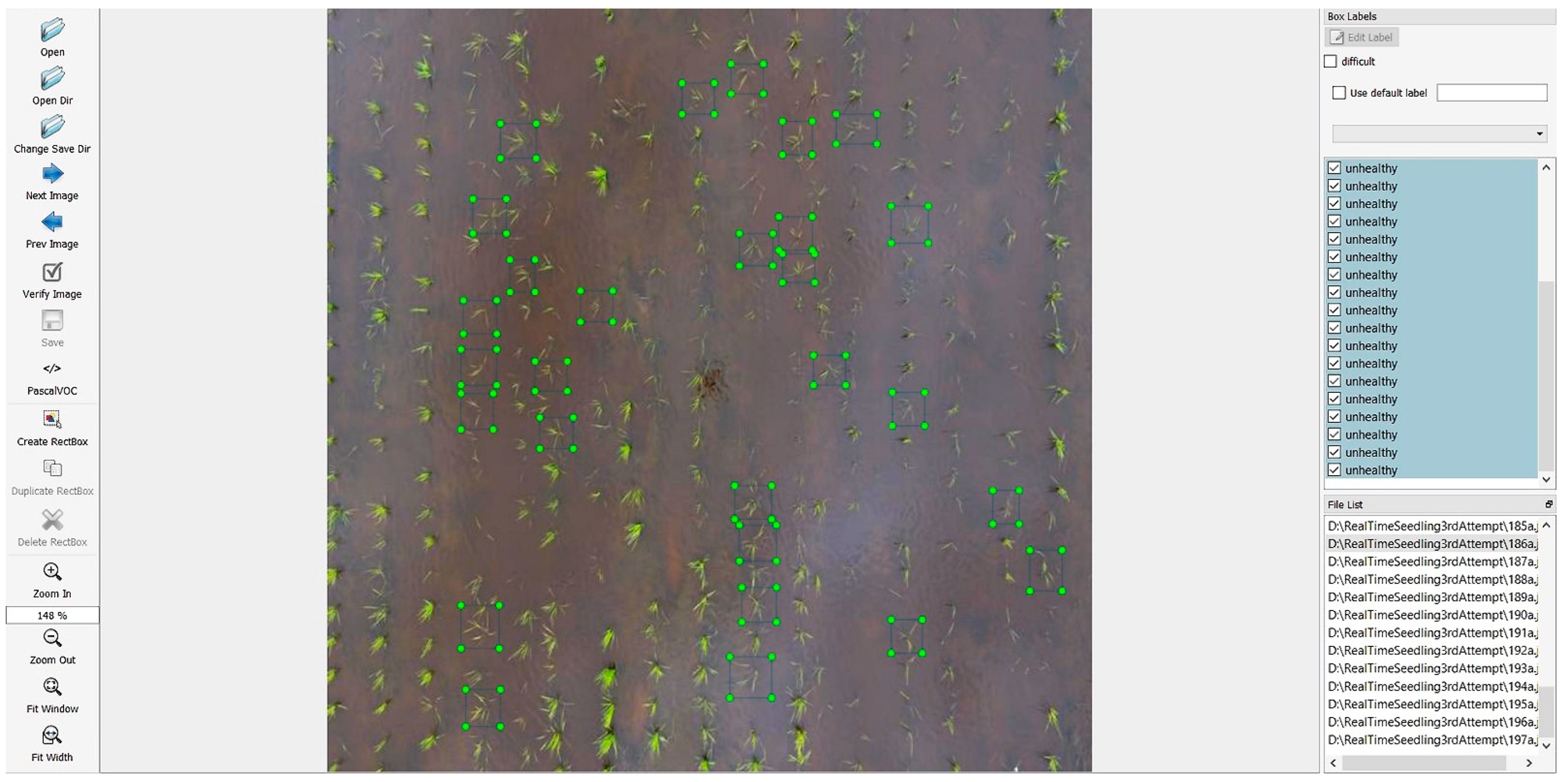
3.2. Data Annotations
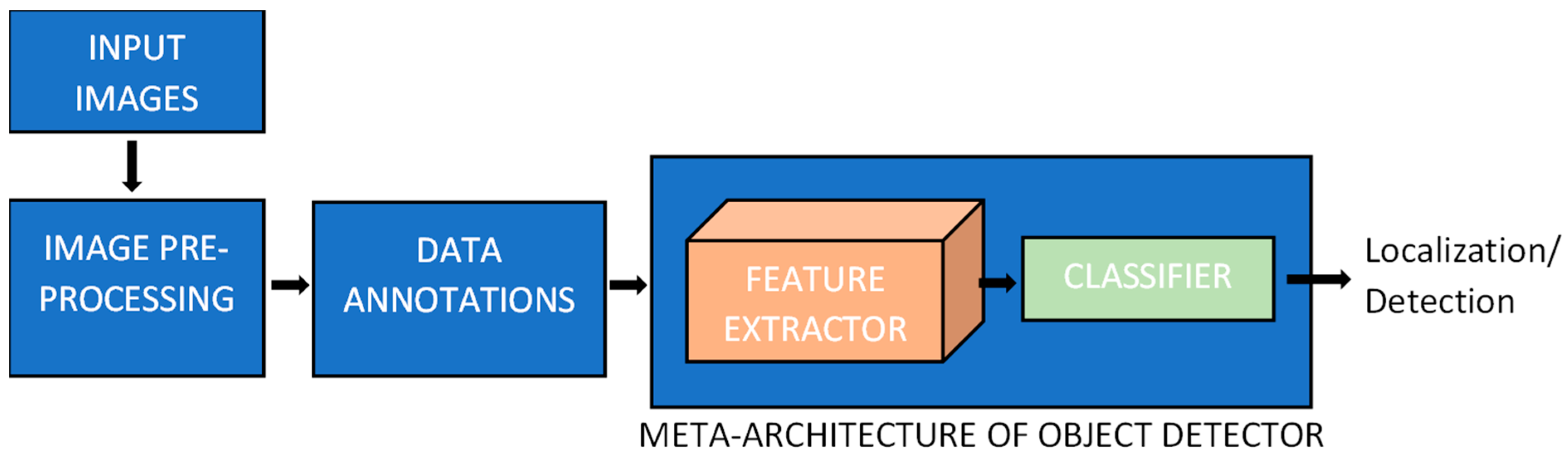
3.3. Methodology Applied
3.3.1. Image Pre-Processing
- (i)
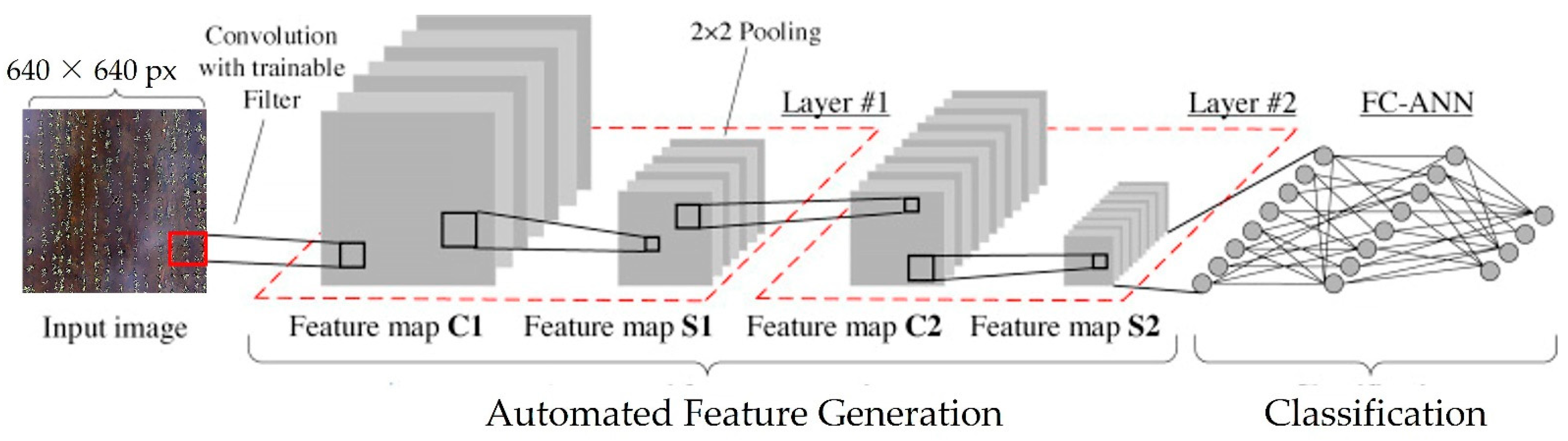
- resizing all images to 640 × 640 px from the original size of 4000 × 3000 px to match the default input image size of all the pretrained models selected.
- (ii)
- An example of the image before and after pre-processing is presented in Figure 3.
3.3.2. Proposed Method
- (i)
- EfficientDet-D1 + EfficienNet;
- (ii)
- SSD + MobileNetV2;
- (iii)
- SSD + ResNet50;
- (iv)
- Faster R-CNN + ResNet50.
Pre-Trained Object Detector
Feature Extractor
Transfer Learning
Training the Model with Fine Tuning
Evaluating the Performance Metrics
- (i)
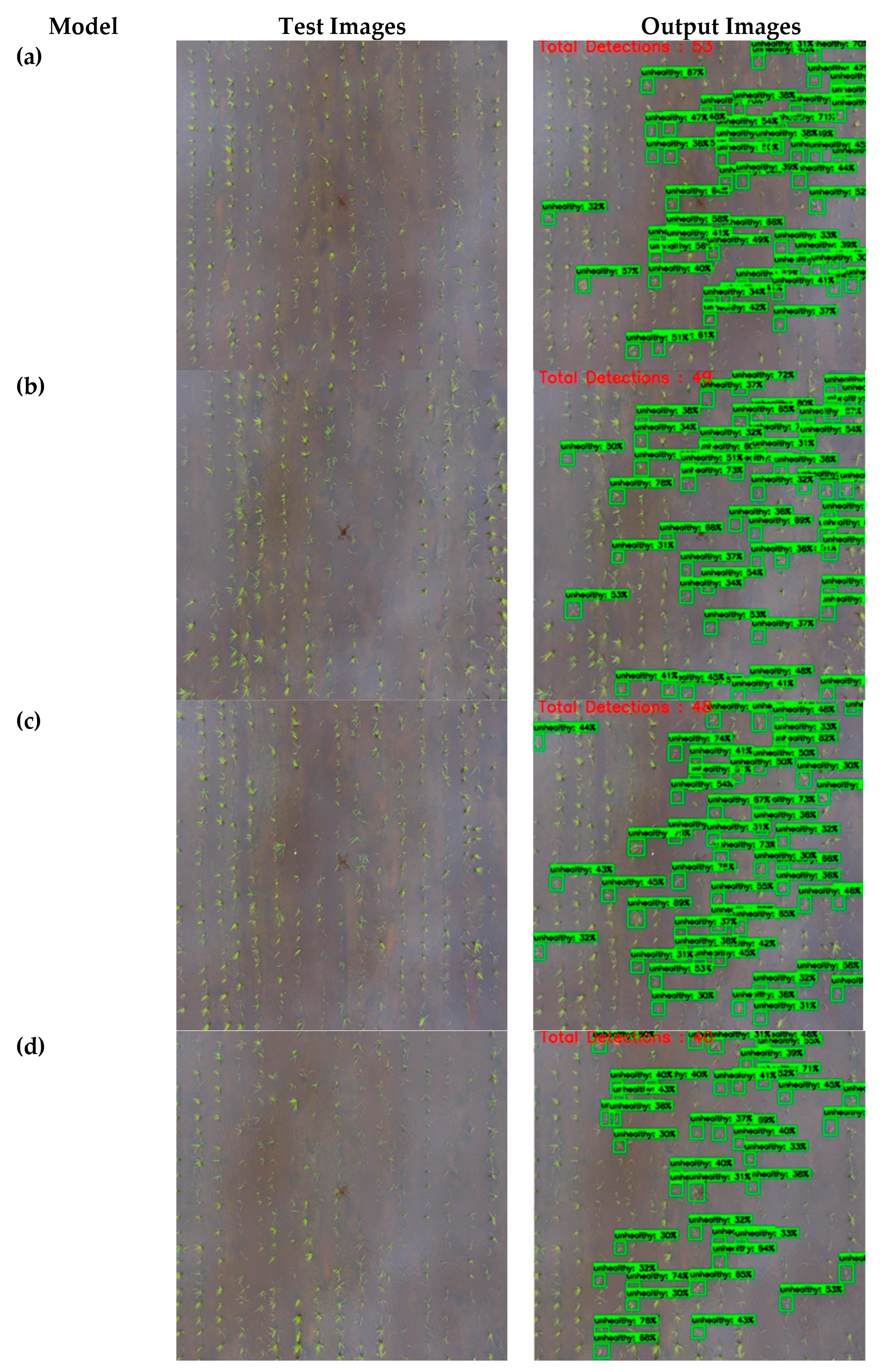
- True Positive (TP)—the number of correctly detected unhealthy paddy seedlings;
- (ii)
- False Positive (FP)—the number of healthy paddy seedlings detected as unhealthy;
- (iii)
- False Negative (FN)—the number of unhealthy paddy seedlings that are not detected;
- (iv)
- F1 score—a measure of the model’s accuracy on a dataset and can be defined as the harmonic mean of precision and recall.
4. Results and Discussion
4.1. Overall Performance
4.2. Comparison with Other Approaches
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Firdaus, R.B.R.; Tan, M.L.; Rahmat, S.R.; Gunaratne, M.S. Paddy, rice and food security in Malaysia: A review of climate change impacts. Cogent Soc. Sci. 2020, 6, 1818373. [Google Scholar] [CrossRef]
- Patel, P.P.; Vaghela, D.B. Crop Diseases and Pests Detection Using Convolutional Neural Network. In Proceedings of the 2019 3rd IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 20–22 February 2019; pp. 2019–2022. [Google Scholar] [CrossRef]
- Maclean, B.H.; Dawe, J.L.; Hardy, D.C. Rice Almanac; IRRI: Los Banos, Phillipines, 2013. [Google Scholar]
- Food and Agriculture Organization of the United Nations. The Future of Food and Agriculture: Trends and Challenges; Food and Agriculture Organization of the United Nations: Rome, Italy, 2017; Volume 4, ISBN 1815-6797. [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Silva, M.F.; Lima, J.L.; Reis, L.P.; Sanfeliu, A.; Tardioli, D. Correction to Robot 2019: Fourth Iberian Robotics Conference. Adv. Intell. Syst. Comput. 2020, 1092, C1. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost Precision Agriculture with Unmanned Aerial Vehicle Remote Sensing and Edge Intelligence: A Survey. Remote Sens. 2021, 13, 4387. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Xue, X.; Jiang, Y.; Shen, Q. Deep learning for remote sensing image classification: A survey. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2018, 8, e1264. [Google Scholar] [CrossRef] [Green Version]
- Calero Hurtado, A.; Pérez Díaz, Y.; Quintero Rodríguez, E.; González-Pardo Hurtado, Y. Densidades de plantas adecuadas para incrementar el rendimiento agrícola del arroz. Cent. Agrícola 2021, 48, 28–36. [Google Scholar]
- Kumar, M.; Dogra, R.; Narang, M.; Singh, M.; Mehan, S. Development and Evaluation of Direct Paddy Seeder in Puddled Field. Sustainability 2021, 13, 2745. [Google Scholar] [CrossRef]
- Yang, X.; Sun, M. A survey on deep learning in crop planting. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 490, p. 062053. [Google Scholar] [CrossRef]
- Pearlstein, L.; Kim, M.; Seto, W. Convolutional neural network application to plant detection, based on synthetic imagery. Proc.-Appl. Imag. Pattern Recognit. Work 2017, 1–4. [Google Scholar] [CrossRef]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep Learning Based Oil Palm Tree Detection and Counting for High-Resolution Remote Sensing Images. Remote Sens. 2017, 9, 22. [Google Scholar] [CrossRef] [Green Version]
- Baweja, H.S.; Parhar, T.; Mirbod, O.; Nuske, S. StalkNet: A Deep Learning Pipeline for High-Throughput Measurement of Plant Stalk Count and Stalk Width. In Field and Service Robotics; Springer: Cham, Switzerland, 2018; pp. 271–284. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Allard, D.; Jin, X.; Andrieu, B.; Burger, P.; Hemmerlé, M.; Comar, A. A method to estimate plant density and plant spacing heterogeneity: Application to wheat crops. Plant Methods 2017, 13, 38. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Yang, G.; Yang, X.; Xu, B.; Han, L.; Zhu, Y. Automatic Counting of in situ Rice Seedlings from UAV Images Based on a Deep Fully Convolutional Neural Network. Remote Sens. 2019, 11, 691. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Deng, X.; Qi, L.; Jiang, Y.; Li, H.; Wang, Y.; Xing, X. Fully convolutional network for rice seedling and weed image segmentation at the seedling stage in paddy fields. PLoS ONE 2019, 14, e0215676. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep learning based banana plant detection and counting using high-resolution red-green-blue (RGB) images collected from unmanned aerial vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef]
- Kitano, B.T.; Mendes, C.C.T.; Geus, A.R.; Oliveira, H.C.; Souza, J.R. Corn Plant Counting Using Deep Learning and UAV Images. IEEE Geosci. Remote Sens. Lett. (Early Access) 2019, 1–5. [Google Scholar] [CrossRef]
- Desai, S.V.; Balasubramanian, V.N.; Fukatsu, T.; Ninomiya, S.; Guo, W. Automatic estimation of heading date of paddy rice using deep learning. Plant Methods 2019, 15, 76. [Google Scholar] [CrossRef] [Green Version]
- Madec, S.; Jin, X.; Lu, H.; De Solan, B.; Liu, S.; Duyme, F.; Heritier, E.; Baret, F. Ear density estimation from high resolution RGB imagery using deep learning technique. Agric. For. Meteorol. 2018, 264, 225–234. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Robertson, J.S. DeepSeedling: Deep convolutional network and Kalman filter for plant seedling detection and counting in the field. Plant Methods 2019, 15, 141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valente, J.; Sari, B.; Kooistra, L.; Kramer, H.; Mucher, S. Automated crop plant counting from very high-resolution aerial imagery. Precis. Agric. 2020, 21, 1366–1384. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, X.; Pu, J.; Xu, S.; Cai, X.; Li, Z. The Field Wheat Count Based on the Efficientdet Algorithm. In Proceedings of the 2020 IEEE 3rd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 27–29 September 2020; pp. 557–561. [Google Scholar] [CrossRef]
- Liu, L.; Lu, H.; Li, Y.; Cao, Z. High-Throughput Rice Density Estimation from Transplantation to Tillering Stages Using Deep Networks. Plant Phenomics 2020, 2020, 1375957. [Google Scholar] [CrossRef]
- Xiao, Z.; Liu, X.; Tan, Y.; Tian, F.; Yang, S.; Li, B. Recognition Method of No-seedling Grids of Trays based on Deep Convolutional Neural Network. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8695–8700. [Google Scholar] [CrossRef]
- Zhang, G.; Wen, Y.; Tan, Y.; Yuan, T.; Zhang, J.; Chen, Y.; Zhu, S.; Duan, D.; Tian, J.; Zhang, Y.; et al. Identification of Cabbage Seedling Defects in a Fast Automatic Transplanter Based on the maxIOU Algorithm. Agronomy 2020, 10, 65. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Li, Z.; Dong, W.; Cao, X.; Wen, Z.; Xiao, R.; Wei, Y.; Zeng, H.; Ma, X. An automatic approach for detecting seedlings per hill of machine-transplanted hybrid rice utilizing machine vision. Comput. Electron. Agric. 2021, 185, 106178. [Google Scholar] [CrossRef]
- Lin, S.; Jiang, Y.; Chen, X.; Biswas, A.; Li, S.; Yuan, Z.; Wang, H.; Qi, L. Automatic Detection of Plant Rows for a Transplanter in Paddy Field Using Faster R-CNN. IEEE Access 2020, 8, 147231–147240. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. CRowNet: Deep Network for Crop Row Detection in UAV Images. IEEE Access 2020, 8, 5189–5200. [Google Scholar] [CrossRef]
- Pang, Y.; Shi, Y.; Gao, S.; Jiang, F.; Veeranampalayam-Sivakumar, A.-N.; Thompson, L.; Luck, J.; Liu, C. Improved crop row detection with deep neural network for early-season maize stand count in UAV imagery. Comput. Electron. Agric. 2020, 178, 105766. [Google Scholar] [CrossRef]
- Yu, Y.; Bao, Y.; Wang, J.; Chu, H.; Zhao, N.; He, Y.; Liu, Y. Crop Row Segmentation and Detection in Paddy Fields Based on Treble-Classification Otsu and Double-Dimensional Clustering Method. Remote Sens. 2021, 13, 901. [Google Scholar] [CrossRef]
- Deng, X.; Liang, S.; Xu, Y.; Gong, K.; Zhong, Z.; Chen, X.; Chen, Y. Object Detection of Alternanthera Philoxeroides at Seedling Stage in Paddy Field Based on Faster R-CNN. IEEE Adv. Inf. Technol. Electron. Autom. Control Conf. 2021, 5, 1125–1129. [Google Scholar] [CrossRef]
- Yarak, K.; Witayangkurn, A.; Kritiyutanont, K.; Arunplod, C.; Shibasaki, R. Oil Palm Tree Detection and Health Classification on High-Resolution Imagery Using Deep Learning. Agriculture 2021, 11, 183. [Google Scholar] [CrossRef]
- Xu, Y.; He, R.; Gao, Z.; Li, C.; Zhai, Y.; Jiao, Y. Weed Density Detection Method Based on Absolute Feature Corner Points in Field. Agronomy 2020, 10, 113. [Google Scholar] [CrossRef] [Green Version]
- Anami, B.S.; Malvade, N.N.; Palaiah, S. Deep learning approach for recognition and classification of yield affecting paddy crop stresses using field images. Artif. Intell. Agric. 2020, 4, 12–20. [Google Scholar] [CrossRef]
- Ramanath, A.; Muthusrinivasan, S.; Xie, Y.; Shekhar, S.; Ramachandra, B. NDVI Versus CNN Features in Deep Learning for Land Cover Clasification of Aerial Images. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 6483–6486. [Google Scholar] [CrossRef]
- An, G.; Xing, M.; He, B.; Liao, C.; Huang, X.; Shang, J.; Kang, H. Using Machine Learning for Estimating Rice Chlorophyll Content from In Situ Hyperspectral Data. Remote Sens. 2020, 12, 3104. [Google Scholar] [CrossRef]
- Ammar, A.; Koubaa, A.; Benjdira, B. Deep-Learning-Based Automated Palm Tree Counting and Geolocation in Large Farms from Aerial Geotagged Images. Agronomy 2021, 11, 1458. [Google Scholar] [CrossRef]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10778–10787. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016, Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 9905, pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Dataset | Testing Dataset | |
|---|---|---|
| Number of Images | 157 | 40 |
| Percentage | 80% | 20% |
| Bounding Boxes Labelled “Unhealthy” | 3140 | 840 |
| Feature Extractor | Parameters (Million) | Number of Layers |
|---|---|---|
| Resnet 50 | 25 | 50 |
| MobileNet V2 | 3.4 | 53 |
| EfficientNet | 6.5 | 237 |
| Object Detector | Feature Extractor | Input Size | Learning Rate | Batch Size | Number of Steps |
|---|---|---|---|---|---|
| EfficientDet-D1 | EfficientNet | 640 × 640 | 1 × 10−3 | 3 | 6400 |
| SSD | MobileNetV2 | 640 × 640 | 2.6 × 10−2 | 6 | 4800 |
| SSD | ResNet50 | 640 × 640 | 1.3 × 10−2 | 4 | 5600 |
| Faster R-CNN | ResNet50 | 640 × 640 | 1.3 × 10−2 | 1 | 3200 |
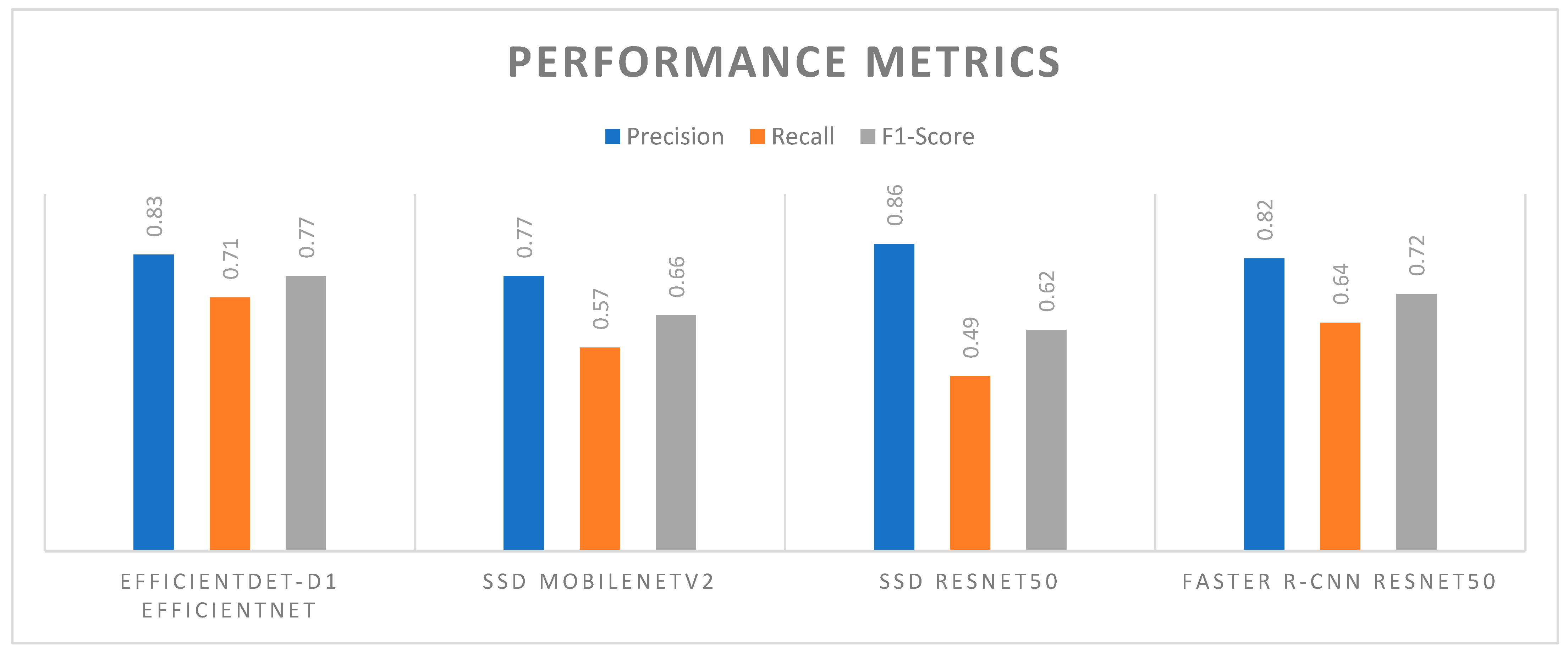
| No. | Model | Performance Metrics | |||
|---|---|---|---|---|---|
| Object Detector | Feature Extractor | Average Precision | Average Recall | F1-Score | |
| 1 | EfficientDet-D1 | EfficientNet | 0.83 | 0.71 | 0.77 |
| 2 | SSD | MobileNetV2 | 0.77 | 0.57 | 0.66 |
| 3 | SSD | ResNet50 | 0.86 | 0.49 | 0.62 |
| 4 | Faster R-CNN | ResNet50 | 0.82 | 0.64 | 0.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anuar, M.M.; Halin, A.A.; Perumal, T.; Kalantar, B. Aerial Imagery Paddy Seedlings Inspection Using Deep Learning. Remote Sens. 2022, 14, 274. https://doi.org/10.3390/rs14020274
Anuar MM, Halin AA, Perumal T, Kalantar B. Aerial Imagery Paddy Seedlings Inspection Using Deep Learning. Remote Sensing. 2022; 14(2):274. https://doi.org/10.3390/rs14020274
Chicago/Turabian StyleAnuar, Mohamed Marzhar, Alfian Abdul Halin, Thinagaran Perumal, and Bahareh Kalantar. 2022. "Aerial Imagery Paddy Seedlings Inspection Using Deep Learning" Remote Sensing 14, no. 2: 274. https://doi.org/10.3390/rs14020274
APA StyleAnuar, M. M., Halin, A. A., Perumal, T., & Kalantar, B. (2022). Aerial Imagery Paddy Seedlings Inspection Using Deep Learning. Remote Sensing, 14(2), 274. https://doi.org/10.3390/rs14020274