





Detection of Waste Plastics in the Environment: Application of Copernicus Earth Observation Data


Abstract
1. Introduction
2. Materials and Methods
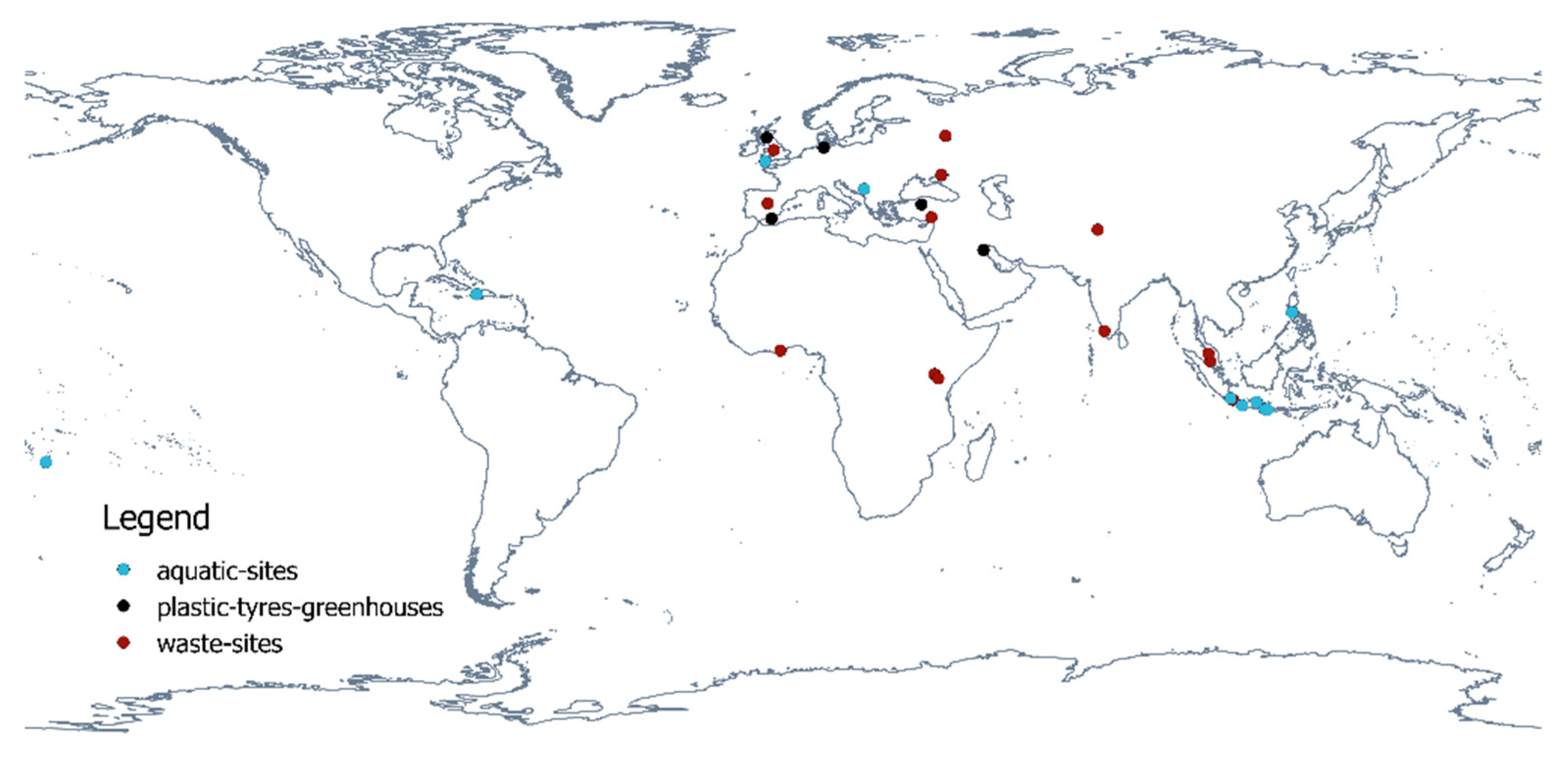
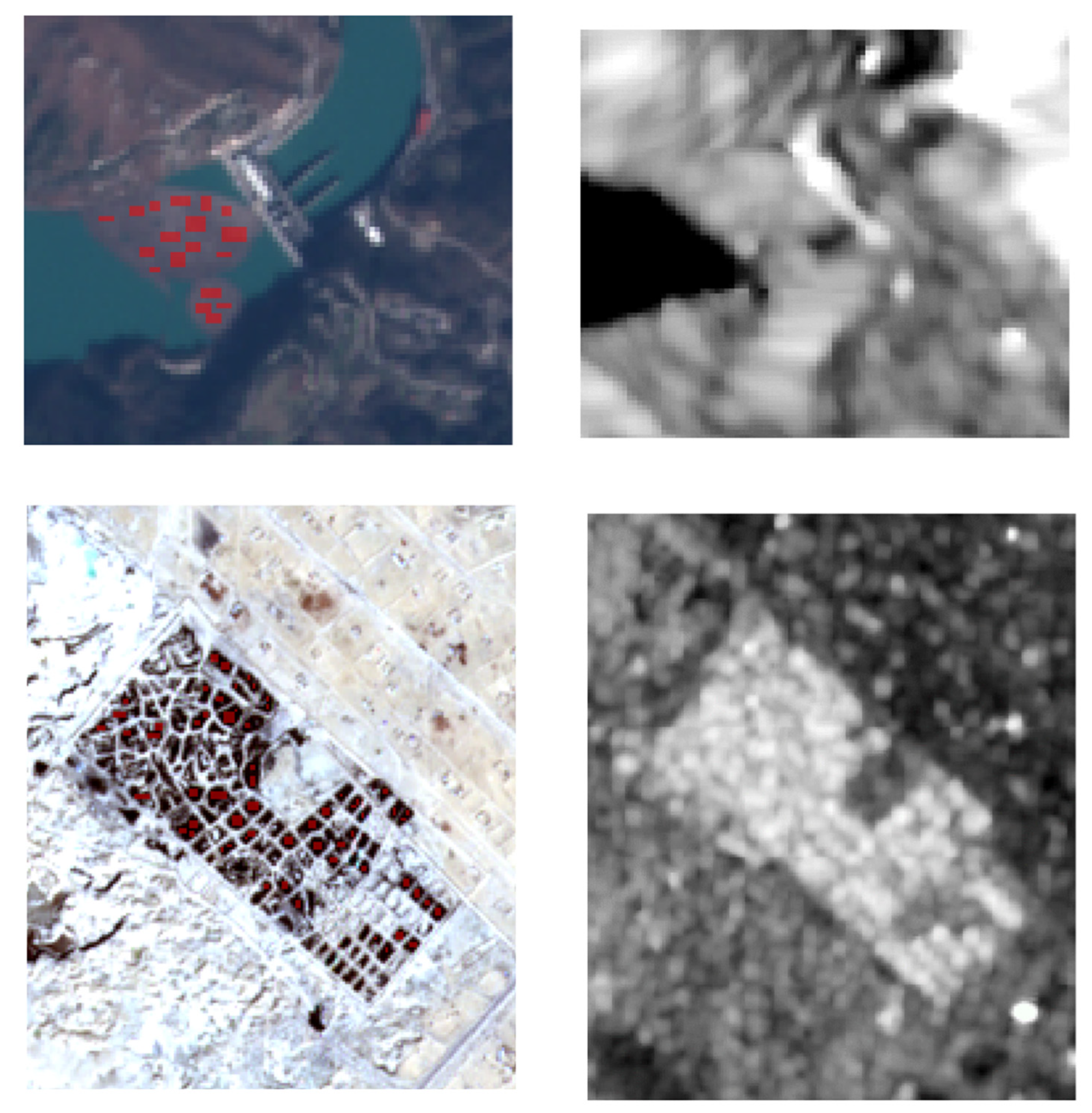
2.1. Test Sites and Input Satellite Products
2.1.1. Višegrad Dam, Bosnia-Herzegovina
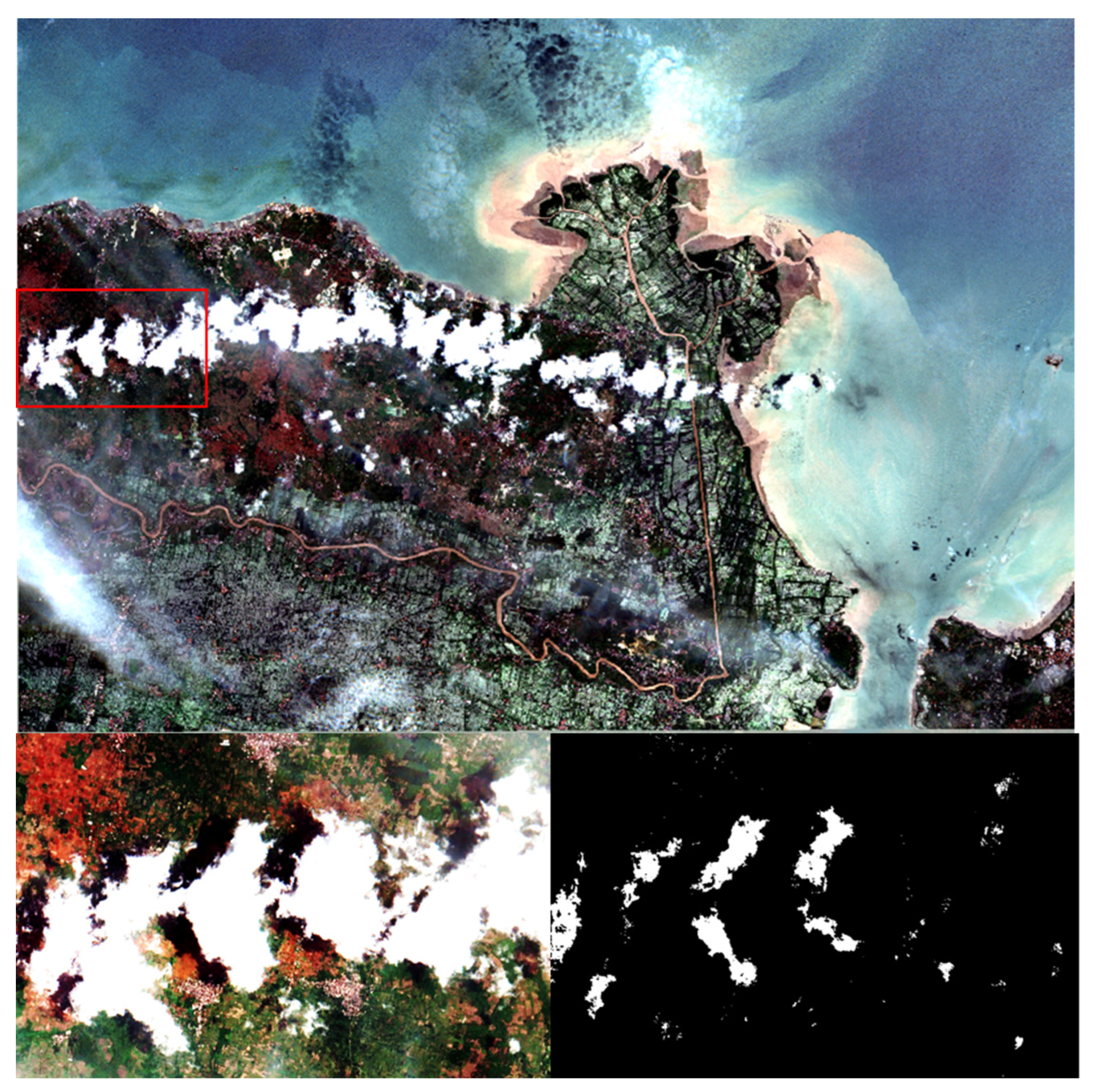
2.1.2. Solo River Mouth, Indonesia
2.1.3. Srinagar Landfill, India
2.1.4. Tyre Graveyard, Kuwait
2.1.5. Almería Greenhouses, Spain
2.2. Classifier Development
2.2.1. Pre-Processing
2.2.2. Thematic Indices
- Visible bands (B02, B03 and B04) > 0.04 to avoid building shadows
- Green/Red ratio (B03/B04) < 0.15 to avoid industry, greenhouses and other surfaces of very high reflectance
- Blue (B02) < 0.4 to be less strict with blue as we target it
- NDVI < 0.7 to avoid vegetation but keep in mind mixed pixels
- NDWI < 0.001 to avoid water [for this work NDWI2 was used
- Normalised Difference Snow Index (NDSI) < 0.0001 to avoid snow
- 0.05 > SWIR (B11) < 0.55
2.2.3. Improved Shadow Masking
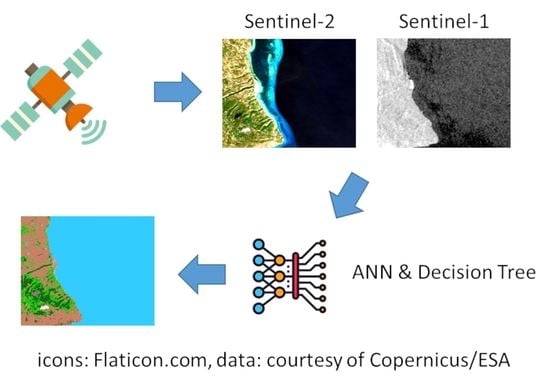
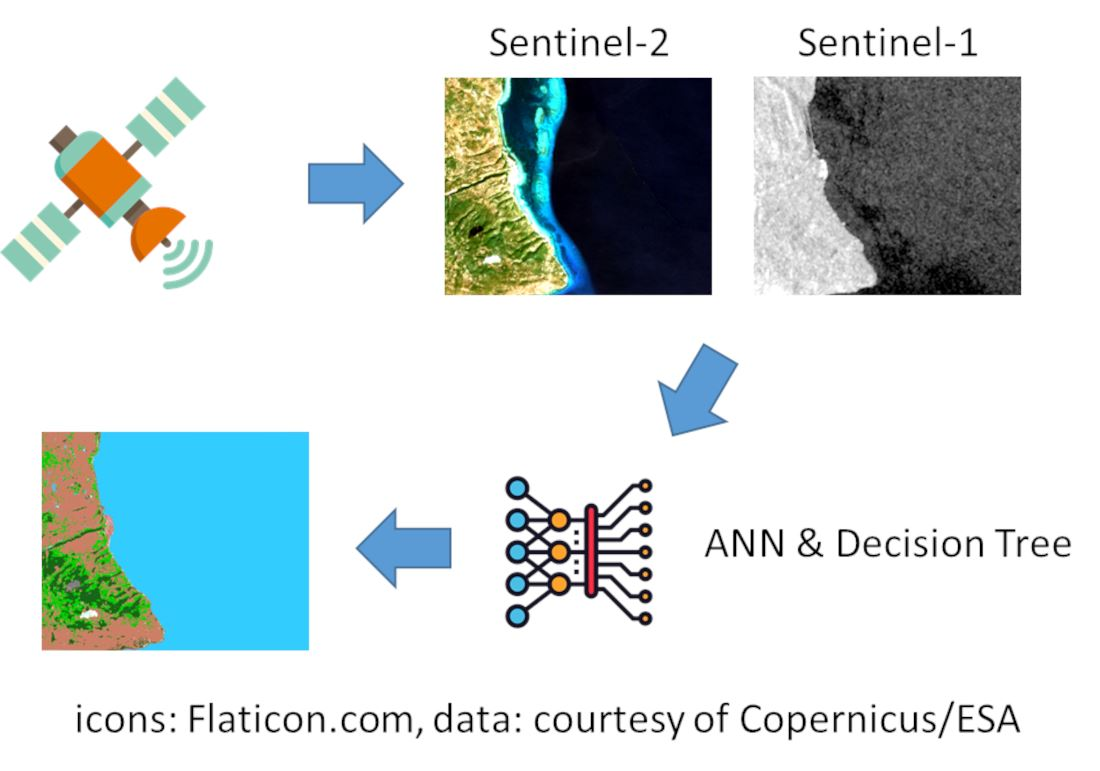
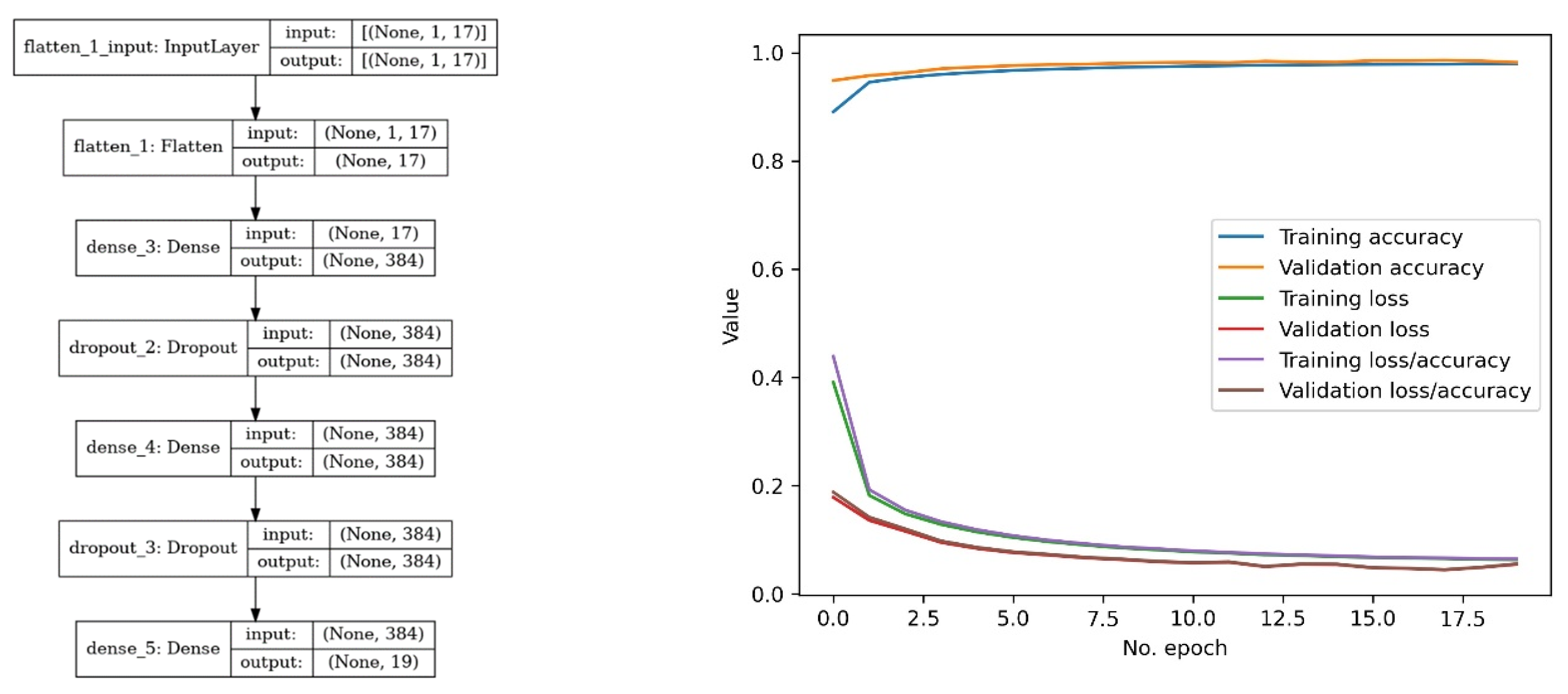
2.2.4. Neural Network
- Flatten is used to flatten all its input into a single dimension.
- Dense implements a regular, deeply connected neural network layer that receives inputs from all neurons in the previous layer and applies a matrix-vector multiplication.
- Dropout reduces the training dataset size so that overtraining does not occur.
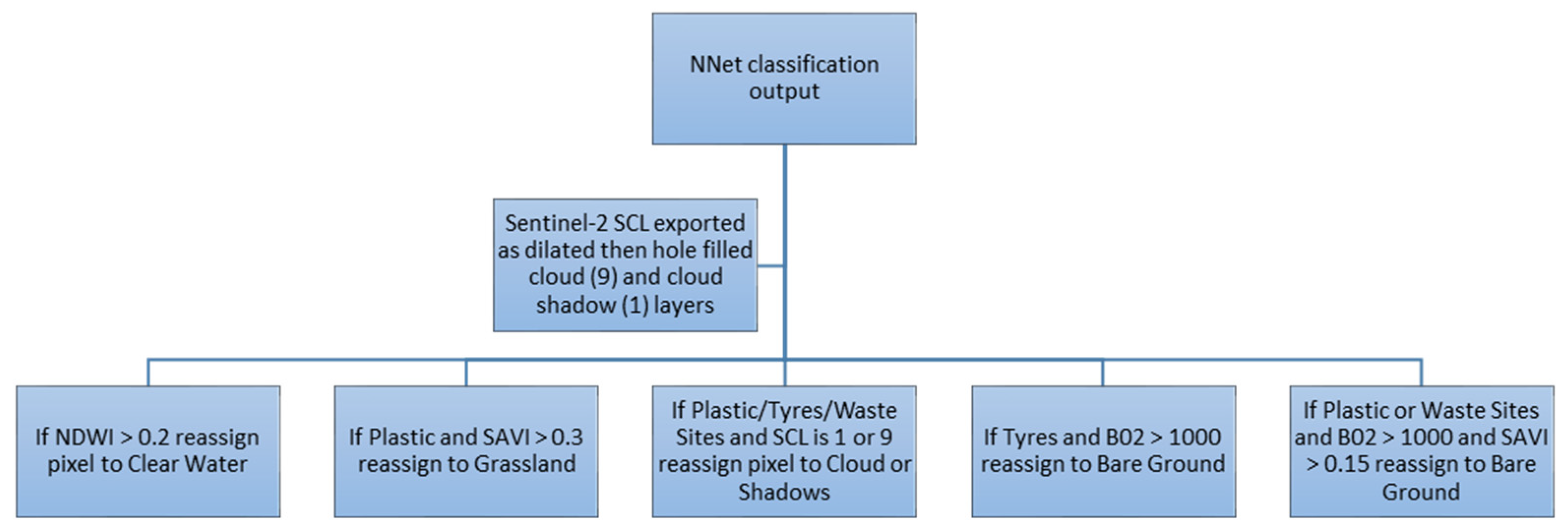
2.2.5. Post Neural Network Decision Tree
2.3. Accuracy Assessment Methodology
3. Results
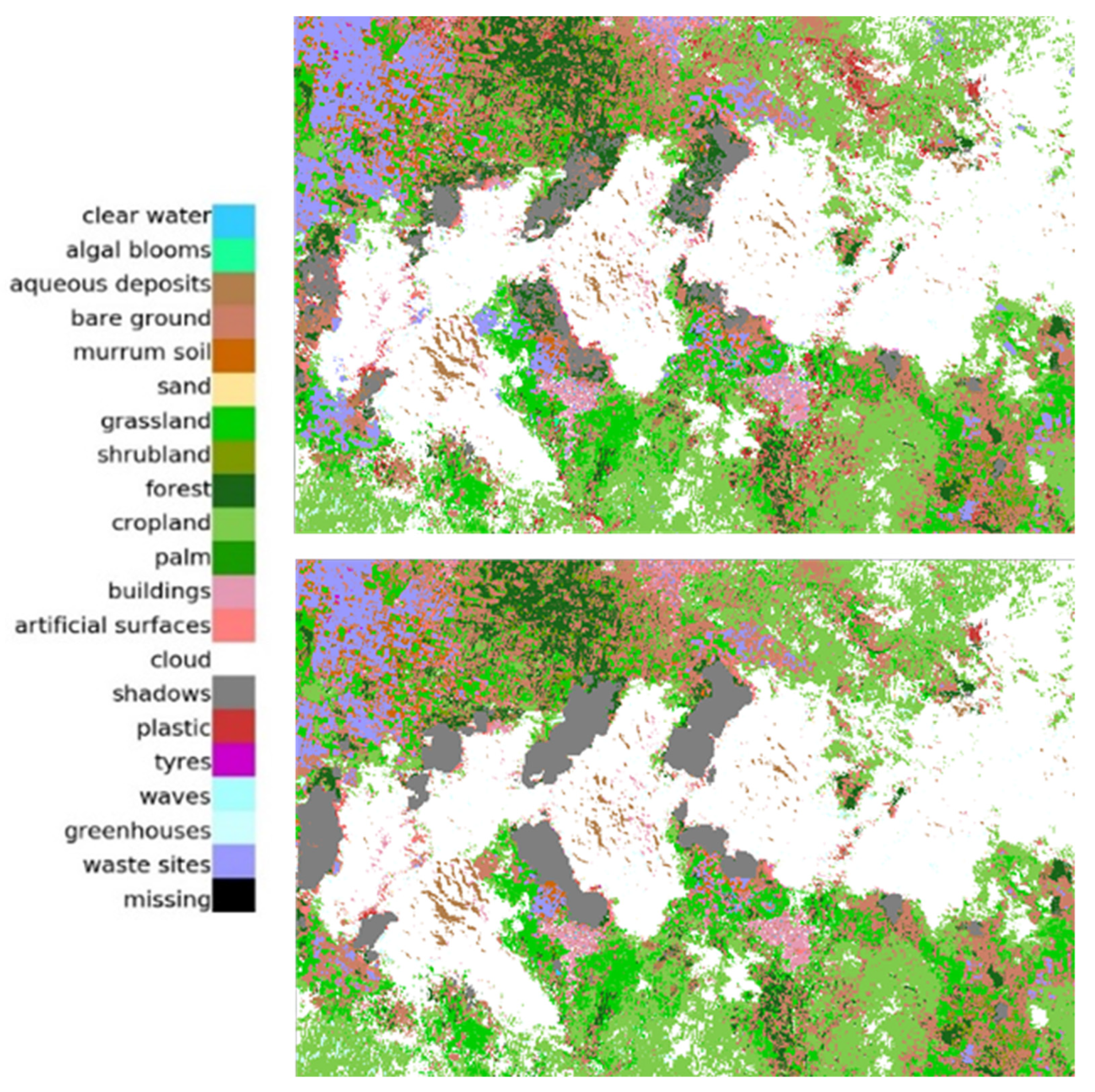
3.1. Decision Tree Impact
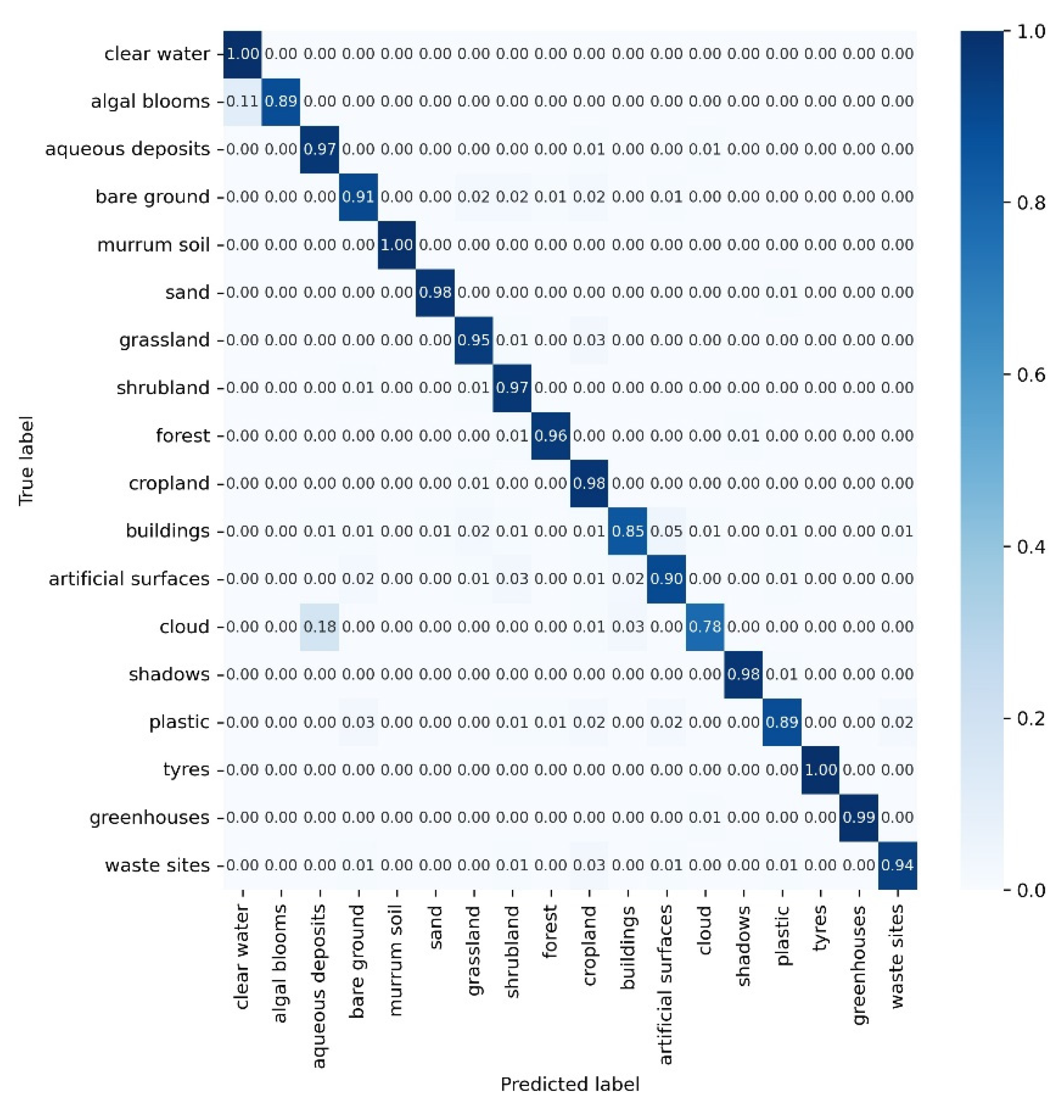
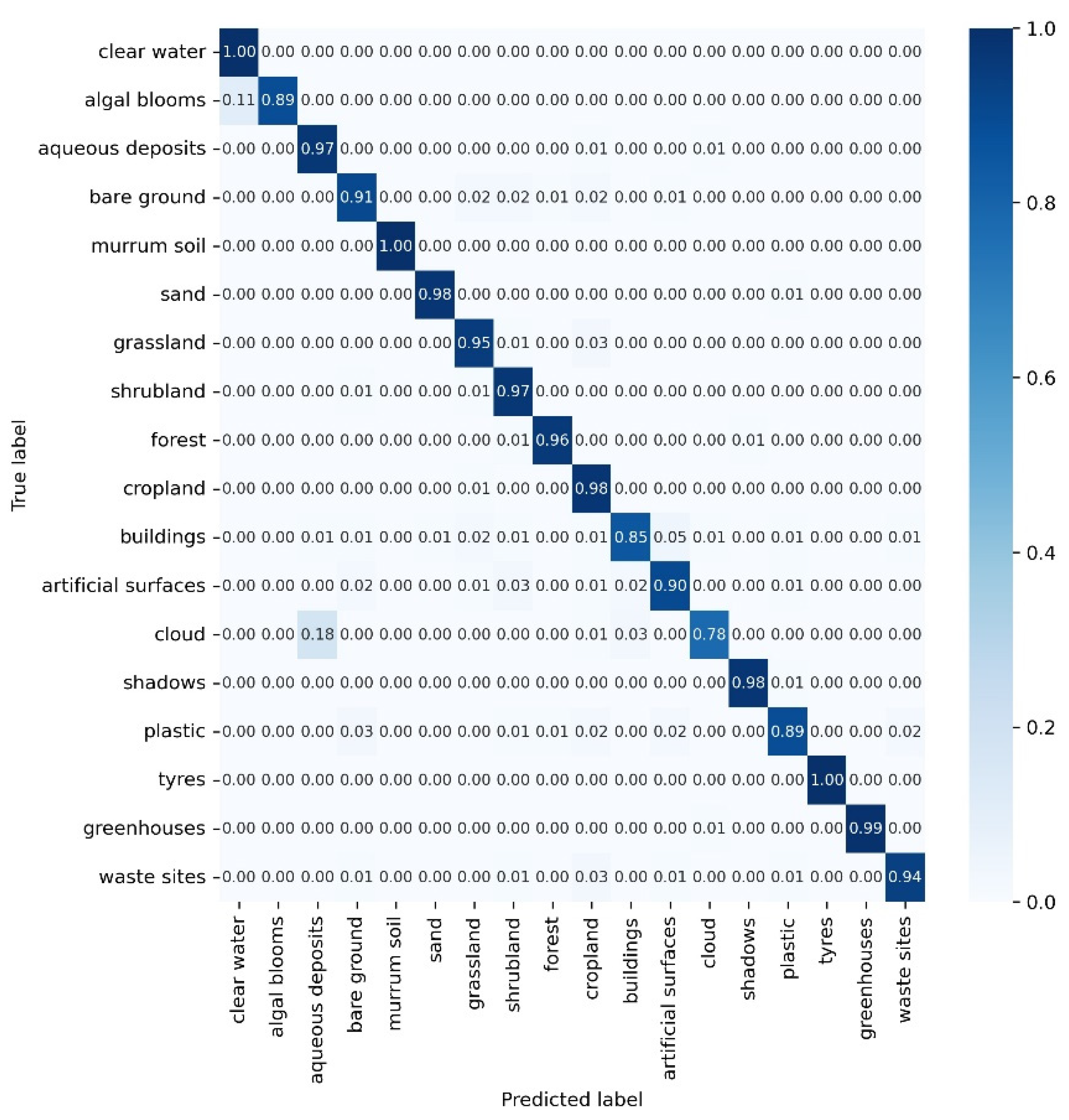
3.2. Accuracy Assessment
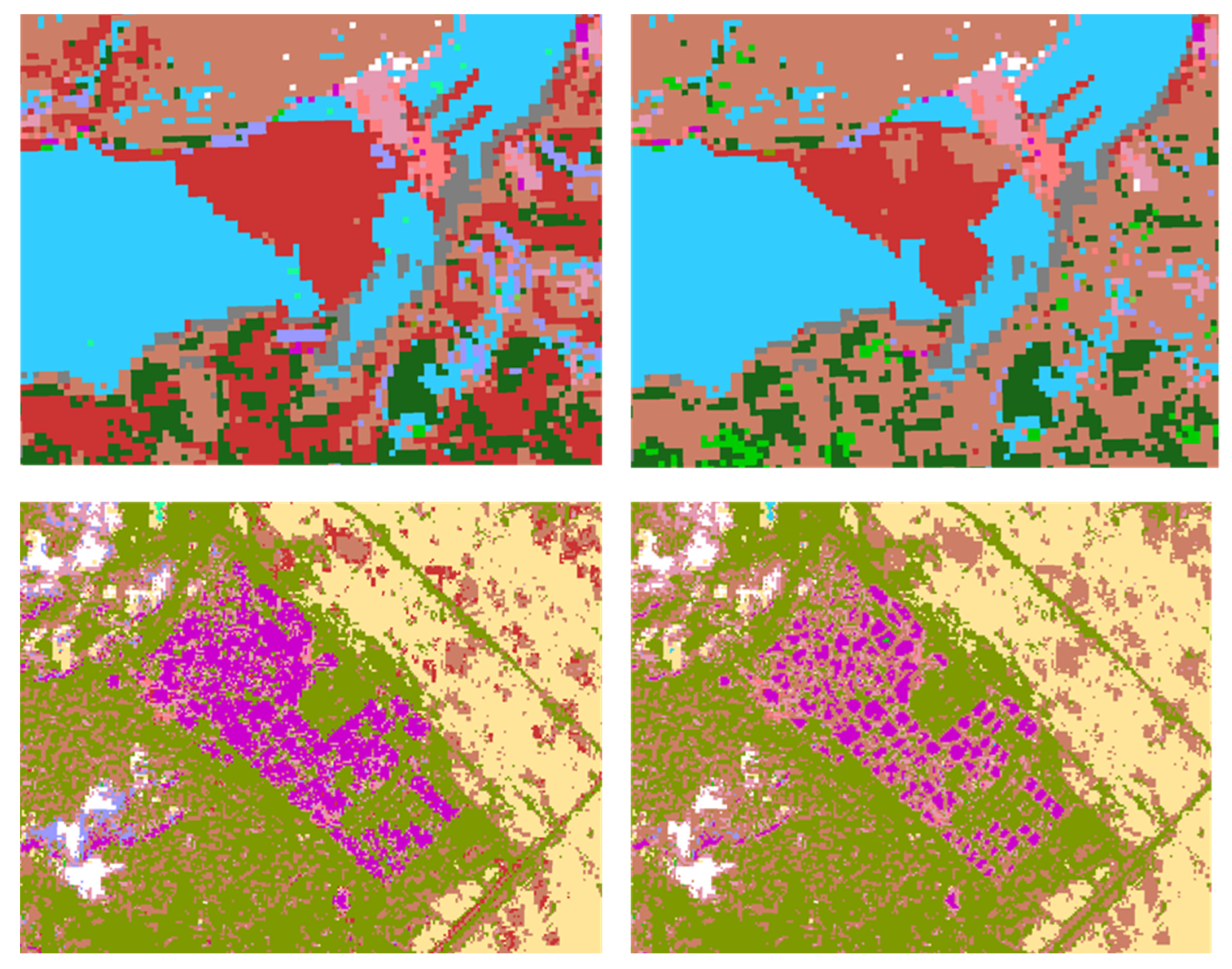
3.3. Application to the Test Sites
4. Discussion
5. Conclusions
- Sentinel-2 is a valuable dataset for plastic waste detection due to its combination of wavebands and high spatial resolution imagery alongside systematic acquisitions. However, research has shown the improvement possible with high-resolution hyperspectral measurements, and the number is increasing with data from precursor satellite missions, such as PRISMA and EnMAP now available, alongside a focus by commercial operators together with the future Copernicus CHIME mission.
- Sentinel-1 improves the overall result when the classifier is applied in terrestrial environments or when there are relatively stationary floating accumulations. However, as Sentinel-1 acquisitions do not coincide with Sentinel-2 tile acquisitions, the combined use of the two missions is not ideally suited to detect plastic floating on water where objects will move over a few days.
- The training/validation dataset is critical to building accurate ML approaches, and validation for plastics waste remains challenging as it is often difficult to see in high-resolution imagery. Therefore, community-shared databases are significant in supporting these efforts. Work will also continue to build the existing training/validation dataset with new locations that cover instances of plastics accumulation in multiple environments.
- The current remote sensing approach primarily uses spectral information due to the size of the accumulations versus Sentinel pixels. Ongoing work is focused on pan-sharpening such datasets with contemporaneous higher resolution commercial datasets, and future work will also consider using hyperspectral missions alongside Sentinel-2.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Site | Sentinel-1 IW GRDH | Sentinel-2 L2A |
|---|---|---|
| Alexandrov Landfill, Russia | S1B 20200928T033648 S1B 20210502T033646 | S2B 20200923T083659 T37VDC S2B 20210511T083559 T37VDC |
| Almería Greenhouses, Spain | S1A 20210408T061050 | S2A 20210505T105031 T30SWF |
| Chemor Landfill, Malaysia | S1A 20180901T230325 | S2A 20181026T032821 T47NQF |
| Dandora Landfill, Kenya | S1A 20200209T155606 | S2B 20200208T074009 T37MBU |
| Empang River Mouth, Indonesia | S1A 20210225T111520 | S2B 20210228T025649 T48MXU |
| Gioto Landfill, Kenya | S1A 20210603T155640 | S2A 20210610T074611 T36MZE |
| Jakata Landfill, West Java | S1A 20190819T223351 | S2B 20190818T025549 T48MYU |
| Jenjarom, Malaysia | S1A 20190424T225548 | S2A 20190424T032541 T47NQD |
| Kerala Landfill, India | S1A 20210314T004059 | S2A 20210314T050651 T43PFM |
| Kuta Beach, Bali | S1A 20190216T104117 | S2B 20190217T021749 T50LKR |
| Madrid Landfill, Spain | S1A 20211115T061821 | S2A 20211114T110321 T30TVK |
| Manilla, Philippines | S1A 20170313T214633 | S2A 20170314T023321 T51PTS |
| Mucar Port, Java | S1A 20190727T104933 | S2A 20190725T022551 T49LHL |
| PML beach target, England [57] | S1B 20180515T063101 | S2B 20180515T112109 T30UVA |
| Scotland, various sites used for Page et al. [21] | S1B 20180625T063732 | S2B 20180627T113319 T30VVH |
| Serayu River Mouth, Indonesia | S1A 20200613T110629 | S2B 20200610T024549 T49MBM |
| Seyhan, Turkey | S1A 20211210T034252 | S2B 20211211T082239 T36SXG |
| Solo River Mouth, Indonesia | S1A 20210218T220906 & 20210218T220931 ** | S2A 20210227T023641 T49MFN |
| Srinagar Landfill, India | S1A 20211031T005910 | S2A 20211029T053941 T43SDT |
| Tapuhia Landfill, Tonga | S1A 20220220T061455 | S2B 20220216T215909 T01KFS |
| TPA Kabupaten Tangerang, Indonesia [65] | S1A 20210422T223357 | S2A 20210424T025541 T48MXU |
| Landfill, Turkey | S1A 20211026T040642 | S2A 20211026T085041 T35TPE |
| Tyre Graveyard, Kuwait | S1A 20201228T024734 & 20201228T024709 ** | S2A 20201226T073321 T38RQT |
| Višegrad Dam, Bosnia-Herzegovina | S1A 20210302T163318 | S2A 20210302T09303 T34TCP * |
| Walleys Landfill, England | S1B 20200920T062219 | S2B 20200921T112119 T30UWD |
| Additional sites used only for the accuracy assessment | ||
| Accra, Ghana | S1A 20220130T181813 | S2B 20220126T102209 T30NYM |
| Ankara Tyre Site, Turkey | S1A 20211027T155127 | S2B 20211028T083949 T36TVK |
| Hamburg, Germany | S1A 20220326T053329 | S2A 20220325T102651 T32UNE |
| Mariupol, Ukraine | S1A 20220111T152022 | S2A 20220108T083331 T37TCN |
| Windrow, Haiti | S1A 20201220T230129 | S2B 20201222T153619 T18QYF |
References
- Royer, S.-J.; Ferrón, S.; Wilson, S.T.; Karl, D.M. Production of Methane and Ethylene from Plastic in the Environment. PLoS ONE 2018, 13, e0200574. [Google Scholar] [CrossRef]
- The World’s Plastic Pollution Crisis Explained. Available online: https://www.nationalgeographic.com/environment/article/plastic-pollution (accessed on 1 May 2022).
- Elhacham, E.; Ben-Uri, L.; Grozovski, J.; Bar-On, Y.M.; Milo, R. Global Human-Made Mass Exceeds All Living Biomass. Nature 2020, 588, 442–444. [Google Scholar] [CrossRef]
- Dumbili, E.; Henderson, L. The Challenge of Plastic Pollution in Nigeria. In Plastic Waste and Recycling; Elsevier: Amsterdam, The Netherlands, 2020; pp. 569–583. ISBN 978-0-12-817880-5. [Google Scholar]
- Fly-Tipping Statistics for England, 2020 to 2021. Available online: https://www.gov.uk/government/statistics/fly-tipping-in-england/fly-tipping-statistics-for-england-2020-to-2021 (accessed on 1 May 2022).
- Waste Disguised as Hay Bales at Turnhouse Farm in Edinburgh. Available online: https://www.bbc.co.uk/news/uk-scotland-edinburgh-east-fife-29567276 (accessed on 20 March 2020).
- Household Waste Disguised as Hay Bales Dumped in Essex. Available online: https://www.bbc.co.uk/news/uk-england-essex-22135870 (accessed on 20 March 2020).
- Briassoulis, D.; Babou, E.; Hiskakis, M.; Scarascia, G.; Picuno, P.; Guarde, D.; Dejean, C. Review, Mapping and Analysis of the Agricultural Plastic Waste Generation and Consolidation in Europe. Waste Manag. Res. 2013, 31, 1262–1278. [Google Scholar] [CrossRef]
- European Commission Waste Framework Directive. Available online: https://environment.ec.europa.eu/topics/waste-and-recycling/waste-framework-directive_en (accessed on 27 June 2022).
- Quinlan, B.L.; Foschi, P.G. Identification of Waste Tires Using High-Resolution Multispectral Satellite Imagery. Photogramm. Eng. Remote Sens. 2012, 78, 463–471. [Google Scholar] [CrossRef]
- World Business Council for Sustainable Development End-of-Life Tires. Available online: https://www.wbcsd.org/Sector-Projects/Tire-Industry-Project/News/End-of-Life-Tires (accessed on 27 June 2022).
- Enfrin, M.; Dumée, L.F.; Lee, J. Nano/Microplastics in Water and Wastewater Treatment Processes—Origin, Impact and Potential Solutions. Water Res. 2019, 161, 621–638. [Google Scholar] [CrossRef]
- Jambeck, J.R.; Geyer, R.; Wilcox, C.; Siegler, T.R.; Perryman, M.; Andrady, A.; Narayan, R.; Law, K.L. Plastic Waste Inputs from Land into the Ocean. Science 2015, 347, 768–771. [Google Scholar] [CrossRef]
- Biermann, L.; Clewley, D.; Martinez-Vicente, V.; Topouzelis, K. Finding Plastic Patches in Coastal Waters Using Optical Satellite Data. Sci. Rep. 2020, 10, 5364. [Google Scholar] [CrossRef]
- Themistocleous, K.; Papoutsa, C.; Michaelides, S.; Hadjimitsis, D. Investigating Detection of Floating Plastic Litter from Space Using Sentinel-2 Imagery. Remote Sens. 2020, 12, 2648. [Google Scholar] [CrossRef]
- Arias, M.; Sumerot, R.; Delaney, J.; Coulibaly, F.; Cozar, A.; Aliani, S.; Suaria, G.; Papadopoulou, T.; Corradi, P. Advances on Remote Sensing of Windrows as Proxies for Marine Litter Based on Sentinel-2/MSI Datasets. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11 July 2021; pp. 1126–1129. [Google Scholar]
- Sivadas, S.K.; Mishra, P.; Kaviarasan, T.; Sambandam, M.; Dhineka, K.; Murthy, M.V.R.; Nayak, S.; Sivyer, D.; Hoehn, D. Litter and Plastic Monitoring in the Indian Marine Environment: A Review of Current Research, Policies, Waste Management, and a Roadmap for Multidisciplinary Action. Mar. Pollut. Bull. 2022, 176, 113424. [Google Scholar] [CrossRef]
- Hasituya; Chen, Z.; Wang, L.; Wu, W.; Jiang, Z.; Li, H. Monitoring Plastic-Mulched Farmland by Landsat-8 OLI Imagery Using Spectral and Textural Features. Remote Sens. 2016, 8, 353. [Google Scholar] [CrossRef]
- Levin, N.; Lugassi, R.; Ramon, U.; Braun, O.; Ben-Dor, E. Remote Sensing as a Tool for Monitoring Plasticulture in Agricultural Landscapes. Int. J. Remote Sens. 2007, 28, 183–202. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Dufaur, J. Proof of Concept for a Model of Light Reflectance of Plastics Floating on Natural Waters. Mar. Pollut. Bull. 2018, 135, 1145–1157. [Google Scholar] [CrossRef]
- Guffogg, J.A.; Blades, S.M.; Soto-Berelov, M.; Bellman, C.J.; Skidmore, A.K.; Jones, S.D. Quantifying Marine Plastic Debris in a Beach Environment Using Spectral Analysis. Remote Sens. 2021, 13, 4548. [Google Scholar] [CrossRef]
- Page, R.; Lavender, S.; Thomas, D.; Berry, K.; Stevens, S.; Haq, M.; Udugbezi, E.; Fowler, G.; Best, J.; Brockie, I. Identification of Tyre and Plastic Waste from Combined Copernicus Sentinel-1 and -2 Data. Remote Sens. 2020, 12, 2824. [Google Scholar] [CrossRef]
- Kruse, C.; Boyda, E.; Chen, S.; Karra, K.; Bou-Nahra, T.; Hammer, D.; Mathis, J.; Maddalene, T.; Jambeck, J.; Laurier, F. Satellite Monitoring of Terrestrial Plastic Waste. arXiv 2022, arXiv:2204.01485. [Google Scholar] [CrossRef]
- Gill, J.; Faisal, K.; Shaker, A.; Yan, W.Y. Detection of Waste Dumping Locations in Landfill Using Multi-Temporal Landsat Thermal Images. Waste Manag. Res. 2019, 37, 386–393. [Google Scholar] [CrossRef] [PubMed]
- Yan, W.Y.; Mahendrarajah, P.; Shaker, A.; Faisal, K.; Luong, R.; Al-Ahmad, M. Analysis of Multi-Temporal Landsat Satellite Images for Monitoring Land Surface Temperature of Municipal Solid Waste Disposal Sites. Environ. Monit. Assess. 2014, 186, 8161–8173. [Google Scholar] [CrossRef]
- Karimi, N.; Ng, K.T.W.; Richter, A. Development and Application of an Analytical Framework for Mapping Probable Illegal Dumping Sites Using Nighttime Light Imagery and Various Remote Sensing Indices. Waste Manag. 2022, 143, 195–205. [Google Scholar] [CrossRef]
- ESA Sentinel-2 Processing Baseline. Available online: https://sentinels.copernicus.eu/web/sentinel/technical-guides/sentinel-2-msi/processing-baseline (accessed on 18 June 2022).
- SAR-MPC Sentinel-1 IPF Versions. Available online: https://sar-mpc.eu/ipf/ (accessed on 18 June 2022).
- Emric, E. Trash Fills Bosnia River Faster than Workers Can Pull It Out. Available online: https://apnews.com/article/environment-serbia-hydroelectric-power-95866b7e3af63b9608218e89791df5d0 (accessed on 5 June 2022).
- Kresna, M. Plastic Trash Runs down the Solo River to Pollute the Java Sea. Available online: https://earthjournalism.net/stories/plastic-trash-runs-down-the-solo-river-to-pollute-the-java-sea (accessed on 5 June 2022).
- Batool, M. Strategy for Solid Waste Management in Srinagar. Available online: https://www.greaterkashmir.com/todays-paper/strategy-for-solid-waste-management-in-srinagar (accessed on 5 June 2022).
- Mukhtar, I. Kuwait Struggling to Get Rid of World’s Biggest Tire Graveyard. Available online: https://www.aa.com.tr/en/environment/kuwait-struggling-to-get-rid-of-world-s-biggest-tire-graveyard/2332769 (accessed on 19 June 2022).
- Scarascia-Mugnozza, G.; Sica, C.; Russo, G. Plastic materials in european agriculture: Actual use and perspectives. J. Agric. Eng. 2012, 42, 15. [Google Scholar] [CrossRef]
- Zhou, S.; Kuester, T.; Bochow, M.; Bohn, N.; Brell, M.; Kaufmann, H. A Knowledge-Based, Validated Classifier for the Identification of Aliphatic and Aromatic Plastics by WorldView-3 Satellite Data. Remote Sens. Environ. 2021, 264, 112598. [Google Scholar] [CrossRef]
- Feng, Q.; Niu, B.; Chen, B.; Ren, Y.; Zhu, D.; Yang, J.; Liu, J.; Ou, C.; Li, B. Mapping of Plastic Greenhouses and Mulching Films from Very High Resolution Remote Sensing Imagery Based on a Dilated and Non-Local Convolutional Neural Network. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102441. [Google Scholar] [CrossRef]
- Zhang, P.; Du, P.; Guo, S.; Zhang, W.; Tang, P.; Chen, J.; Zheng, H. A Novel Index for Robust and Large-Scale Mapping of Plastic Greenhouse from Sentinel-2 Images. Remote Sens. Environ. 2022, 276, 113042. [Google Scholar] [CrossRef]
- STEP: Science Toolbox Exploitation Platform. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 20 March 2020).
- Truckenbrodt, J.; Freemantle, T.; Williams, C.; Jones, T.; Small, D.; Dubois, C.; Thiel, C.; Rossi, C.; Syriou, A.; Giuliani, G. Towards Sentinel-1 SAR Analysis-Ready Data: A Best Practices Assessment on Preparing Backscatter Data for the Cube. Data 2019, 4, 93. [Google Scholar] [CrossRef]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. In Proceedings of the 3rd International Electronic Conference on Remote Sensing, Online, 22 May–5 June 2019; p. 11. [Google Scholar]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.; et al. A Review of the Application of Optical and Radar Remote Sensing Data Fusion to Land Use Mapping and Monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- STEP. Sen2Cor. Available online: https://step.esa.int/main/snap-supported-plugins/sen2cor/ (accessed on 27 June 2022).
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- McFeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Fisser, H. GitHub, Truck Detection Sentinel2 COVID19. Available online: https://github.com/hfisser/Truck_Detection_Sentinel2_COVID19 (accessed on 13 May 2022).
- Zha, Y.; Gao, J.; Ni, S. Use of Normalized Difference Built-up Index in Automatically Mapping Urban Areas from TM Imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Zhou, T.; Fu, H.; Sun, C.; Wang, S. Shadow Detection and Compensation from Remote Sensing Images under Complex Urban Conditions. Remote Sens. 2021, 13, 699. [Google Scholar] [CrossRef]
- Tsai, V.J.D. A Comparative Study on Shadow Compensation of Color Aerial Images in Invariant Color Models. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1661–1671. [Google Scholar] [CrossRef]
- Olaya-Marín, E.J.; Martínez-Capel, F.; Vezza, P. A Comparison of Artificial Neural Networks and Random Forests to Predict Native Fish Species Richness in Mediterranean Rivers. Knowl. Managt. Aquatic Ecosyst. 2013, 409, 07. [Google Scholar] [CrossRef]
- CORINE Land Cover. Available online: https://www.eea.europa.eu/publications/COR0-landcover (accessed on 19 September 2018).
- Liang, J.; Liu, D. A Local Thresholding Approach to Flood Water Delineation Using Sentinel-1 SAR Imagery. ISPRS J. Photogramm. Remote Sens. 2020, 159, 53–62. [Google Scholar] [CrossRef]
- O’Malley, T.; Bursztein, E.; Long, J.; Chollet, F.; Jin, H.; Invernizzi, L. KerasTuner. Available online: https://github.com/keras-team/keras-tuner (accessed on 27 June 2022).
- Sokolova, M.; Lapalme, G. A Systematic Analysis of Performance Measures for Classification Tasks. Inf. Processing Manag. 2009, 45, 427–437. [Google Scholar] [CrossRef]
- Tharwat, A. Classification Assessment Methods. ACI 2021, 17, 168–192. [Google Scholar] [CrossRef]
- Vieira, A.J.; Garrett, J.M. Understanding Interobserver Agreement: The Kappa Statistic. Fam. Med. 2005, 37, 360–363. [Google Scholar]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159. [Google Scholar] [CrossRef]
- Martínez-Vicente, V.; Clark, J.R.; Corradi, P.; Aliani, S.; Arias, M.; Bochow, M.; Bonnery, G.; Cole, M.; Cózar, A.; Donnelly, R.; et al. Measuring Marine Plastic Debris from Space: Initial Assessment of Observation Requirements. Remote Sens. 2019, 11, 2443. [Google Scholar] [CrossRef]
- Garaba, S.P.; Dierssen, H.M. An Airborne Remote Sensing Case Study of Synthetic Hydrocarbon Detection Using Short Wave Infrared Absorption Features Identified from Marine-Harvested Macro- and Microplastics. Remote Sens. Environ. 2018, 205, 224–235. [Google Scholar] [CrossRef]
- Taggio, N.; Aiello, A.; Ceriola, G.; Kremezi, M.; Kristollari, V.; Kolokoussis, P.; Karathanassi, V.; Barbone, E. A Combination of Machine Learning Algorithms for Marine Plastic Litter Detection Exploiting Hyperspectral PRISMA Data. Remote Sens. 2022, 14, 3606. [Google Scholar] [CrossRef]
- Lu, L.; Tao, Y.; Di, L. Object-Based Plastic-Mulched Landcover Extraction Using Integrated Sentinel-1 and Sentinel-2 Data. Remote Sens. 2018, 10, 1820. [Google Scholar] [CrossRef]
- Sannigrahi, S.; Basu, B.; Basu, A.S.; Pilla, F. Development of Automated Marine Floating Plastic Detection System Using Sentinel-2 Imagery and Machine Learning Models. Mar. Pollut. Bull. 2022, 178, 113527. [Google Scholar] [CrossRef] [PubMed]
- Kikaki, A.; Karantzalos, K.; Power, C.A.; Raitsos, D.E. Remotely Sensing the Source and Transport of Marine Plastic Debris in Bay Islands of Honduras (Caribbean Sea). Remote Sens. 2020, 12, 1727. [Google Scholar] [CrossRef]
- Kikaki, K.; Kakogeorgiou, I.; Mikeli, P.; Raitsos, D.E.; Karantzalos, K. MARIDA: A Benchmark for Marine Debris Detection from Sentinel-2 Remote Sensing Data. PLoS ONE 2022, 17, e0262247. [Google Scholar] [CrossRef] [PubMed]
- D’Amour, A.; Heller, K.; Moldovan, D.; Adlam, B.; Alipanahi, B.; Beutel, A.; Chen, C.; Deaton, J.; Eisenstein, J.; Hoffman, M.D.; et al. Underspecification Presents Challenges for Credibility in Modern Machine Learning. arXiv 2020, arXiv:2011.03395. [Google Scholar]
- World Bank. Plastic Waste Discharges from Rivers and Coastlines in Indonesia; Marine Plastics Series, East Asia and Pacific Region; World Bank: Washington, DC, USA, 2021. [Google Scholar]
















| Test Site (Co-Ordinates) | Sentinel-1 IW GRDH | Sentinel-2 L2A |
|---|---|---|
| Višegrad Dam (43°45′35.62″N 19°17′15.68″E) | S1A 20210302T163318 | S2A 20210302T09303 T34TCP * |
| Solo River Mouth (6°50′57.89″S 112°34′33.44″E) | S1A 20210218T220906 & 20210218T220931 ** | S2A 20210227T023641 T49MFN |
| Srinagar Landfill (34°7′28.81″N 74°47′11.60″E) | S1A 20211031T005910 | S2A 20211029T053941 T43SDT |
| Tyre Graveyard (29°15′24.42″N 47°40′22.96″E) | S1A 20201228T024734 & 20201228T024709 ** | S2A 20201226T073321 T38RQT |
| Almería Greenhouses (36°43′6.72″N 2°45′12.82″W) | S1A 20210408T061050 | S2A 20210505T105031 T30SWF |
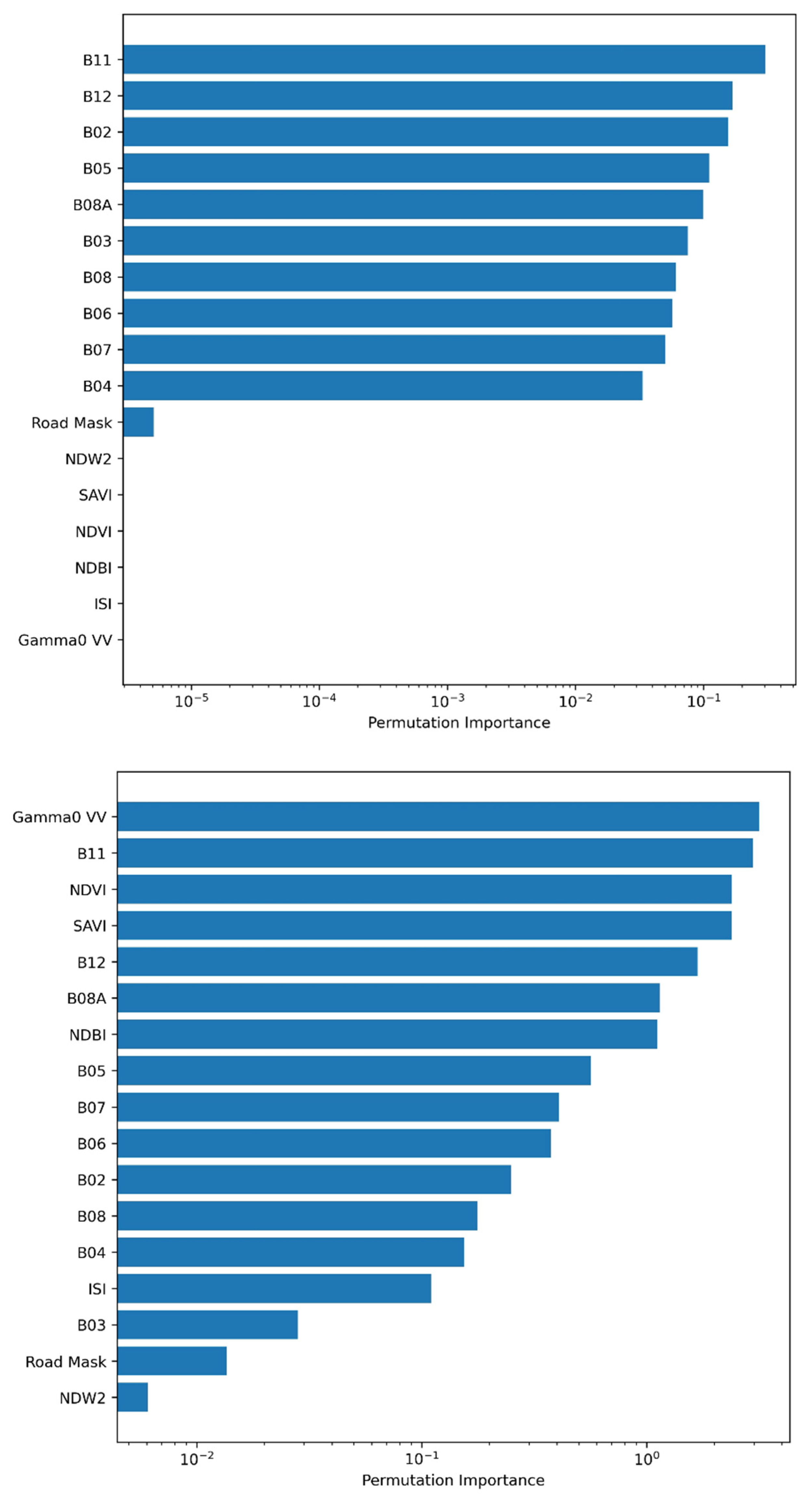
| Layer Number | MSI Band Number and Central Wavelength (nm) | Description | Original Spatial Resolution (m) |
|---|---|---|---|
| 1 | B02 (490) | Blue | 10 |
| 2 | B03 (560) | Green | 10 |
| 3 | B04 (665) | Red | 10 |
| 4 | B05 (705) | Red Edge | 20 |
| 5 | B06 (740) | Red Edge | 20 |
| 6 | B07 (783) | Red Edge | 20 |
| 7 | B08 (842) | NIR | 10 |
| 8 | B08A (865) | Red Edge | 20 |
| 9 | B11 (1610) | SWIR | 20 |
| 10 | B12 (1190) | SWIR | 20 |
| 11 | NDVI | 10 | |
| 12 | SAVI | 10 | |
| 13 | NDWI2 | 10 | |
| 14 | Road Mask | 10 | |
| 15 | NDBI | 10 | |
| 16 | ISI | 10 | |
| 17 | Gamma0 VV | 5 × 20 |
| Level 1 | Level 2 | Level 3 | |||
|---|---|---|---|---|---|
| 1. | Water | 1.1. | Clear Water | ||
| 1.2. | Algal Blooms | ||||
| 1.3. | Aqueous Deposits | ||||
| 2. | Land | 2.1. | Non-Photosynthetic | ||
| 2.2. | Green Vegetation | 2.2.1. | Woodland | ||
| 2.2.2. | Grassland | ||||
| 2.3. | Urban | 2.3.1. | Industrial | ||
| 2.3.2. | Artificial Surfaces | ||||
| 2.4. | Plastics | 2.4.1 | Tyres | ||
| 2.4.2 | Plastic | ||||
| 2.4.3 | Greenhouses | ||||
| 2.4.4 | Waste sites | ||||
| Class | Original Number of Pixels | Original Percentage | Updated Number of Pixels | Updated Percentage |
|---|---|---|---|---|
| Clear Water | 810,210 | 65.4% | 587,792 | 47.5% |
| Algal Blooms | 10,184 | 0.8% | 27,773 | 2.2% |
| Aqueous Deposits | 37,924 | 3.1% | 47,191 | 3.8% |
| Bare Ground | 34,307 | 2.8% | 44,659 | 3.6% |
| Murrum Soil | 56 | 0.0% | 20,683 | 1.7% |
| Sand | 9097 | 0.7% | 27,012 | 2.2% |
| Grassland | 11,513 | 0.9% | 28,703 | 2.3% |
| Shrubland | 10,341 | 0.8% | 27,882 | 2.3% |
| Forest | 31,502 | 2.5% | 42,695 | 3.4% |
| Cropland | 7939 | 0.6% | 26,201 | 2.1% |
| Buildings | 7038 | 0.6% | 25,570 | 2.1% |
| Artificial Surfaces | 7519 | 0.6% | 25,907 | 2.1% |
| Cloud | 247,323 | 20.0% | 193,771 | 15.6% |
| Shadow | 7387 | 0.6% | 25,815 | 2.1% |
| Plastic | 667 | 0.0% | 21,111 | 1.7% |
| Tyres | 351 | 0.0% | 20,889 | 1.7% |
| Greenhouses | 4163 | 0.3% | 23,558 | 1.9% |
| Waste Sites | 1143 | 0.1% | 21,444 | 1.7% |
| Total number after adjustment | 1,238,656 pixels split into 928,992 training pixels and 309,664 validation pixels | |||
| Class | Precision | Recall | F1-Score |
|---|---|---|---|
| Clear Water | 0.99 | 1.00 | 1.00 |
| Algal Blooms | 1.00 | 0.89 | 0.94 |
| Aqueous Deposits | 0.57 | 0.89 | 0.72 |
| Bare Ground | 0.95 | 0.92 | 0.93 |
| Murrum Soil | 1.00 | 1.00 | 1.00 |
| Sand | 0.99 | 0.98 | 0.98 |
| Grassland | 0.92 | 0.95 | 0.94 |
| Shrubland | 0.90 | 0.97 | 0.93 |
| Forest | 0.96 | 0.96 | 0.96 |
| Cropland | 0.84 | 0.98 | 0.91 |
| Buildings | 0.78 | 0.85 | 0.82 |
| Artificial Surfaces | 0.91 | 0.90 | 0.91 |
| Cloud | 0.99 | 0.78 | 0.88 |
| Shadow | 0.99 | 0.98 | 0.98 |
| Plastic | 0.91 | 0.90 | 0.90 |
| Tyres | 1.00 | 1.00 | 1.00 |
| Greenhouses | 0.99 | 0.99 | 0.99 |
| Waste Sites | 0.95 | 0.94 | 0.94 |
| Aggregate average Precision | 0.950 | ||
| KAPPA coefficient | 0.860 | ||
| Class | Precision | Recall | F1-Score |
|---|---|---|---|
| Clear Water | 0.99 | 1.00 | 1.00 |
| Algal Blooms | 0.99 | 0.89 | 0.94 |
| Aqueous Deposits | 0.28 | 0.97 | 0.44 |
| Bare Ground | 0.97 | 0.91 | 0.94 |
| Murrum Soil | 0.74 | 1.00 | 0.85 |
| Sand | 0.99 | 0.98 | 0.98 |
| Grassland | 0.88 | 0.95 | 0.91 |
| Shrubland | 0.87 | 0.97 | 0.92 |
| Forest | 0.95 | 0.96 | 0.96 |
| Cropland | 0.72 | 0.98 | 0.83 |
| Buildings | 0.45 | 0.85 | 0.59 |
| Artificial Surfaces | 0.88 | 0.90 | 0.89 |
| Cloud | 1.00 | 0.78 | 0.88 |
| Shadow | 0.96 | 0.98 | 0.97 |
| Plastic | 0.43 | 0.89 | 0.58 |
| Tyres | 0.95 | 1.00 | 0.97 |
| Greenhouses | 0.91 | 0.99 | 0.95 |
| Waste Sites | 0.74 | 0.94 | 0.83 |
| Aggregate average Precision | 0.820 | ||
| KAPPA coefficient | 0.897 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lavender, S. Detection of Waste Plastics in the Environment: Application of Copernicus Earth Observation Data. Remote Sens. 2022, 14, 4772. https://doi.org/10.3390/rs14194772
Lavender S. Detection of Waste Plastics in the Environment: Application of Copernicus Earth Observation Data. Remote Sensing. 2022; 14(19):4772. https://doi.org/10.3390/rs14194772
Chicago/Turabian StyleLavender, Samantha. 2022. "Detection of Waste Plastics in the Environment: Application of Copernicus Earth Observation Data" Remote Sensing 14, no. 19: 4772. https://doi.org/10.3390/rs14194772
APA StyleLavender, S. (2022). Detection of Waste Plastics in the Environment: Application of Copernicus Earth Observation Data. Remote Sensing, 14(19), 4772. https://doi.org/10.3390/rs14194772