




An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks





Abstract
:
1. Introduction
1.1. Related Works
1.2. Contributions
- We employ the PLS technique to investigate the uplink secure rate maximization problem by joint considering channel allocation from UAVs to the HAP, users’ power control, and UAVs’ 3D position.
- In order to improve the spectrum utilization of NOMA-enabled networks, we propose a NOMA pairing scheme based on the K-means clustering algorithm. Then, by exploiting the block coordinate descent (BCD) algorithm, the formulated optimization problem is decoupled into three subproblems. Afterward, an iterative algorithm is designed, where three optimization variables are tackled in turn.
- Finally, simulation results show that our designed algorithm improves the uplink secure rate, reduces complexity, and speeds up the rate of convergence.
1.3. Organization
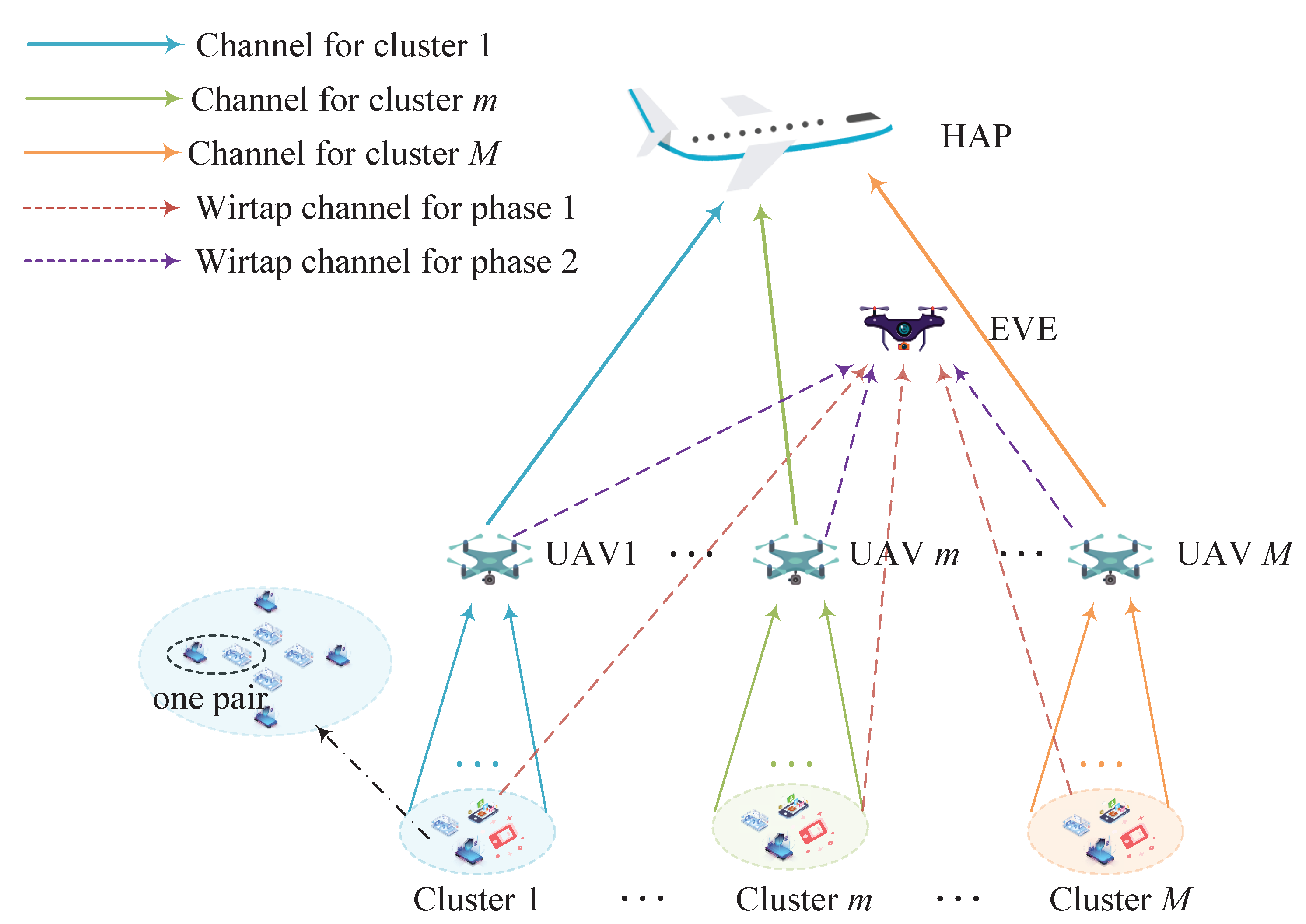
2. System Model and Problem Formulation
2.1. System Model
2.2. Problem Formulation
3. Secure Rate Maximization Scheme
3.1. K-Means Cluster Pair Algorithm
| Algorithm 1 K-means cluster pair algorithm |
|
3.2. Resource Allocation
3.2.1. Channel Allocation
3.2.2. Power Optimization
3.2.3. Height Optimization
| Algorithm 2 Height optimization based on ACO algorithm |
|
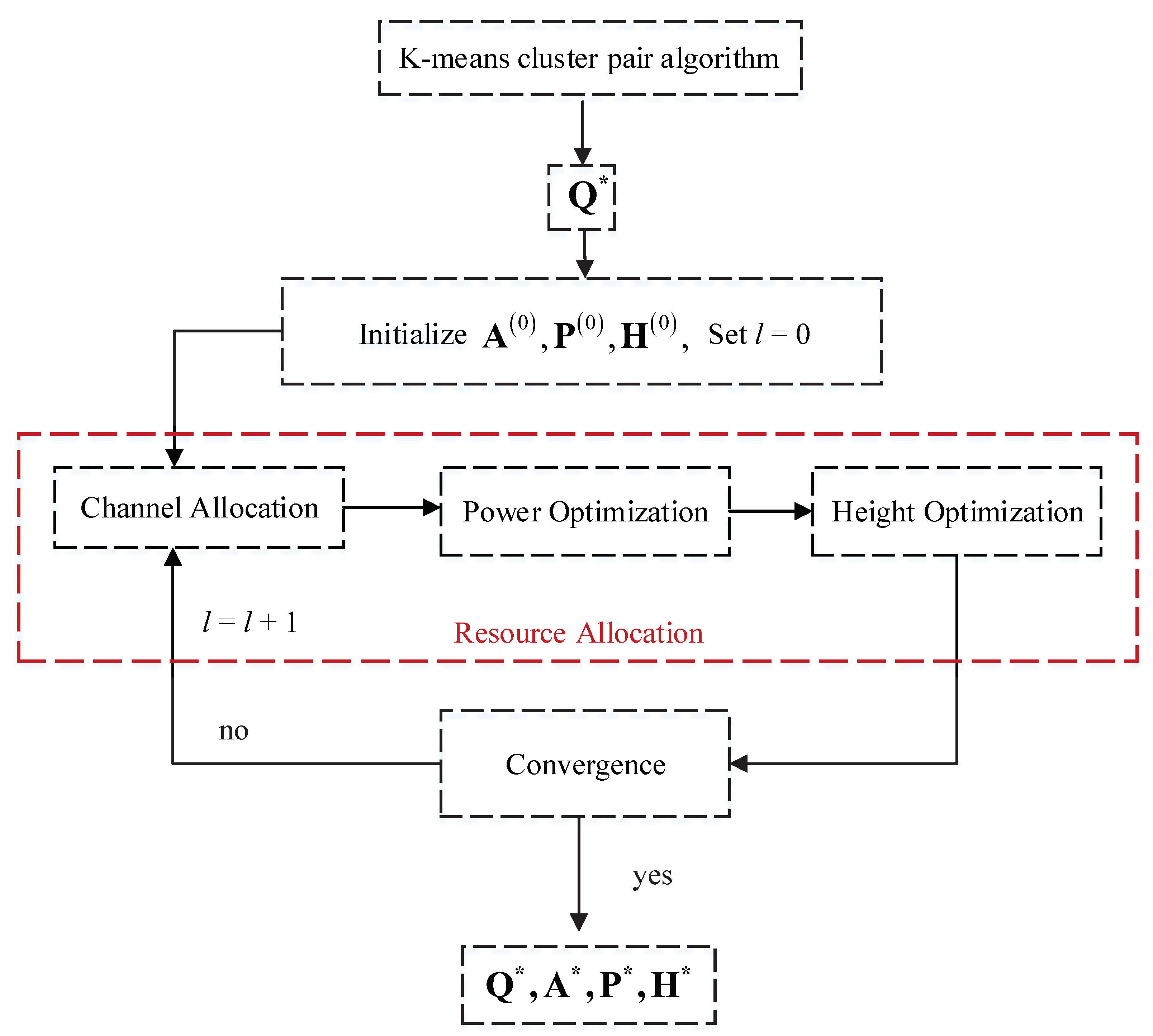
3.3. Iterative Algorithm
4. Simulation Experiments
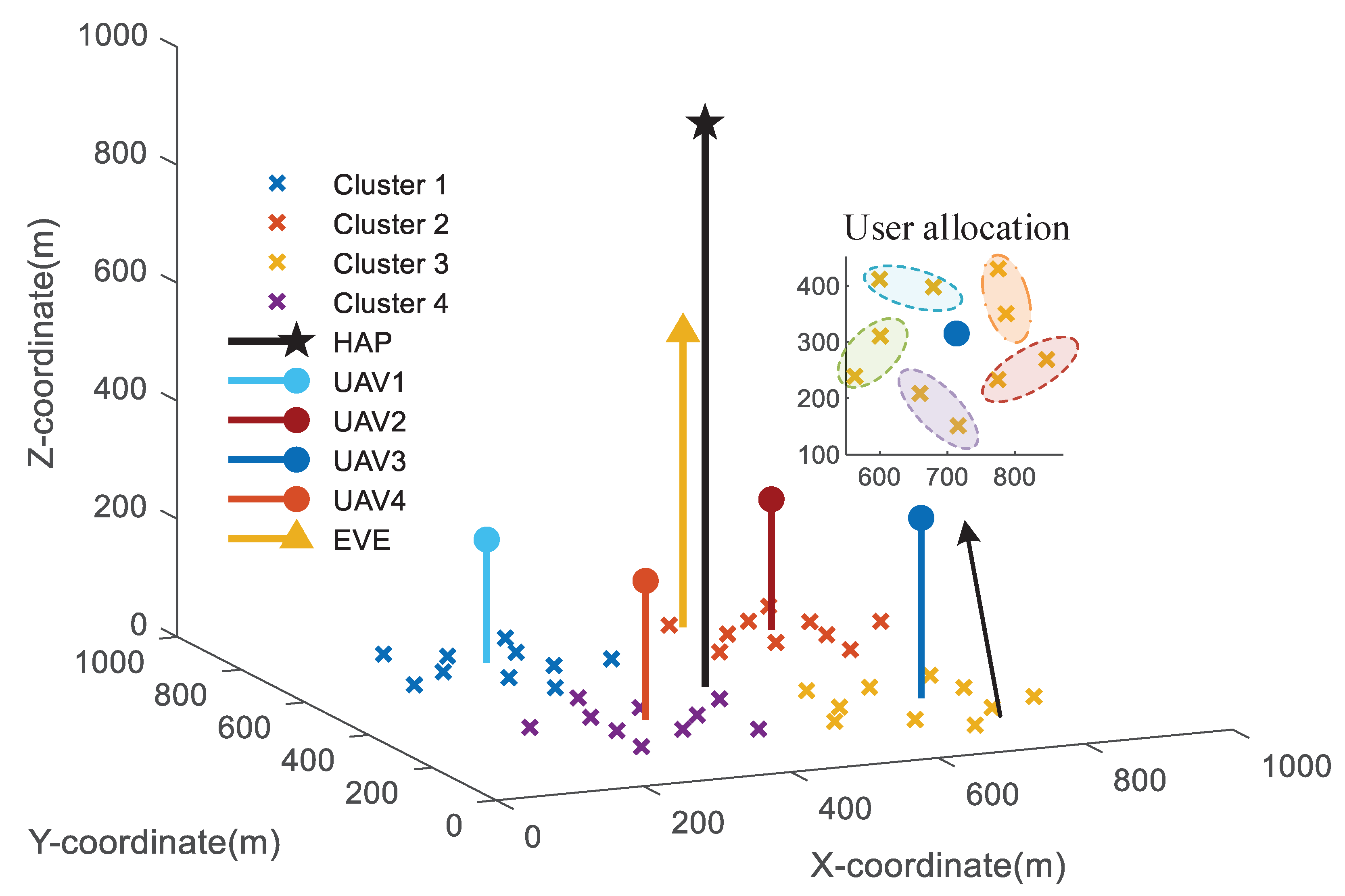
4.1. Initialization
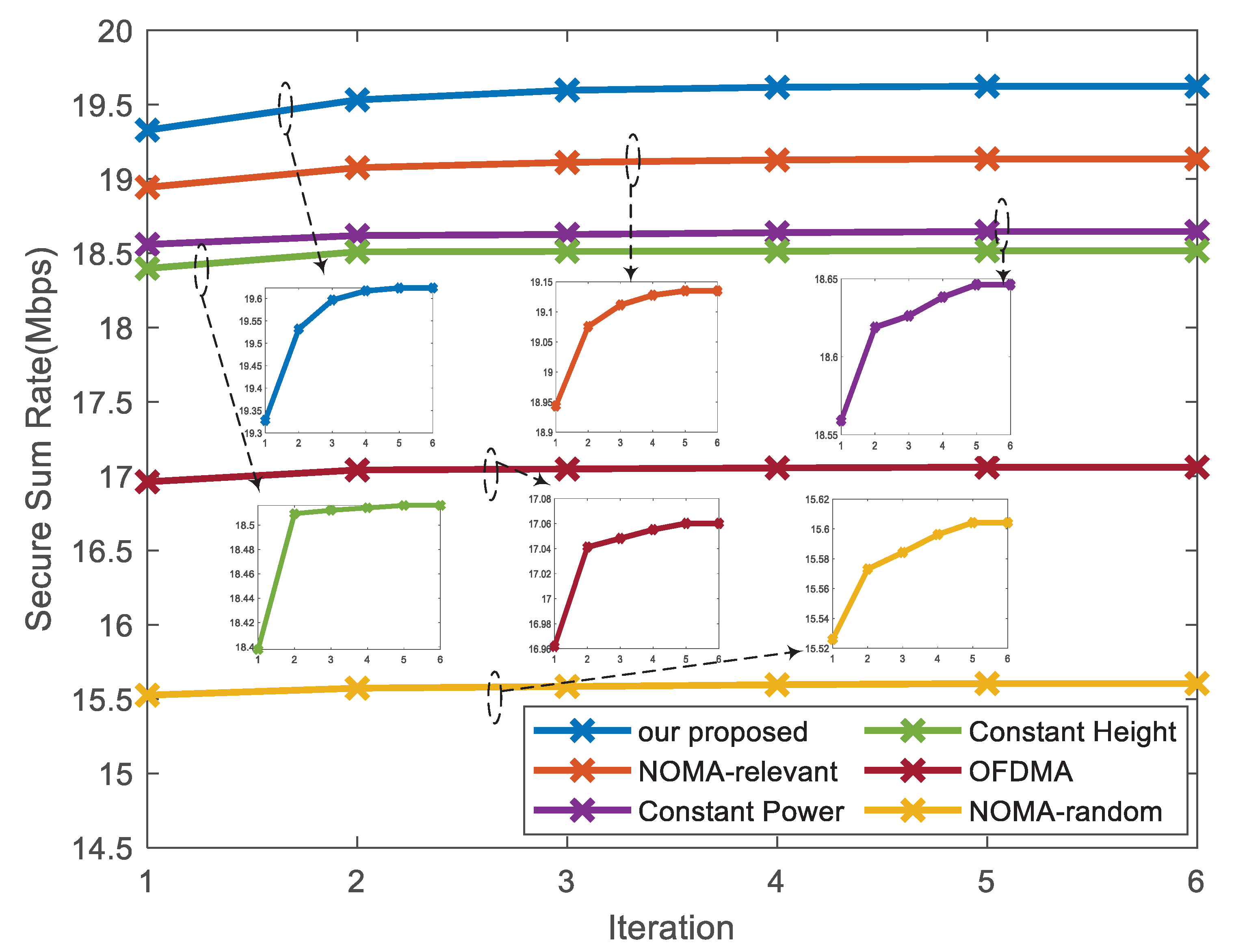
4.2. Numerical Results
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Korala, H.; Georgakopoulos, D.; Jayaraman, P.P.; Yavari, A. Managing Time-Sensitive IoT Applications via Dynamic Application Task Distribution and Adaptation. Remote Sens. 2021, 13, 4148. [Google Scholar] [CrossRef]
- Wei, Z.; Masouros, C.; Liu, F.; Chatzinotas, S.; Ottersten, B. Energy- and Cost-Efficient Physical Layer Security in the Era of IoT: The Role of Interference. IEEE Commun. Mag. 2020, 58, 81–87. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N.; Tanwar, S. Blockchain-envisioned UAV communication using 6G networks: Open issues, use cases, and future directions. IEEE Internet Things J. 2021, 8, 5416–5441. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Wang, D.; He, Y.; Yu, K.; Srivastava, G.; Nie, L.; Zhang, R. Delay-Sensitive Secure NOMA Transmission for Hierarchical HAP–LAP Medical-Care IoT Networks. IEEE Trans. Ind. Inf. 2022, 18, 5561–5572. [Google Scholar] [CrossRef]
- Konishi, M.; Nishimaki, T.; Shibata, Y.; Nabatame, S.; Nagate, A. An experimental study of uplink co-channel spectrum-sharing system between HAPS and terrestrial mobile communication networks. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Wang, D.; Zhou, F.; Lin, W.; Ding, Z.; Al-Dhahir, N. Cooperative Hybrid Nonorthogonal Multiple Access-Based Mobile-Edge Computing in Cognitive Radio Networks. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1104–1117. [Google Scholar] [CrossRef]
- Wang, J.; Feng, W.; Tang, J.; Zhao, N.; Fu, Y.; Zhang, X. NOMA-based UAV-aided networks for emergency communications. China Commun. 2020, 11, 54–66. [Google Scholar]
- Wang, J.; Liu, M.; Sun, J.; Gui, G.; Gacanin, H. Multiple unmanned-aerial-vehicles deployment and user pairing for nonorthogonal multiple access schemes. IEEE Internet Things J. 2021, 6, 1883–1895. [Google Scholar] [CrossRef]
- Hu, B.; Wang, L.; Chen, S.; Cui, J.; Chen, L. An uplink throughput optimization scheme for UAV-enabled urban emergency communications. IEEE Internet Things J. 2022, 9, 4291–4302. [Google Scholar] [CrossRef]
- Zeng, M.; Yadav, A.; Dobre, O.A.; Poor, H.V. Energy-efficient joint user-RB association and power allocation for uplink hybrid NOMA-OMA. IEEE Internet Things J. 2019, 6, 5119–5131. [Google Scholar] [CrossRef] [Green Version]
- Pischella, M.; Chorti, A.; Fijalkow, I. Performance analysis of uplink NOMA-relevant strategy under statistical delay QoS constraints. IEEE Wirel. Commun. Lett. 2020, 9, 1323–1326. [Google Scholar] [CrossRef]
- He, Y.; Nie, L.; Guo, T.; Kaur, K.; Hassan, M.M.; Yu, K. A NOMA-Enabled Framework for Relay Deployment and Network Optimization in Double-Layer Airborne Access VANETs. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Cao, X.; Yang, P.; Alzenad, M.; Xi, X.; Wu, D.; Yanikomeroglu, H. Airborne communication networks: A survey. J. Sel. Areas Commun. 2018, 36, 1907–1926. [Google Scholar] [CrossRef]
- Ramabadran, S.; Sharma, S.; Vishwakarma, N.; Madhukumar, A.S. HAPS-based relaying for integrated space–air–ground networks with hybrid FSO/RF communication: A performance analysis. Trans. Aerosp. Electron. Syst. 2021, 57, 1581–1599. [Google Scholar]
- Zhang, X.; Cheng, W.; Zhang, H. Heterogeneous statistical QoS provisioning over airborne mobile wireless networks. IEEE J. Sel. Areas Commun. 2018, 36, 2139–2152. [Google Scholar] [CrossRef]
- Masood, A.; Nguyen, T.-V.; Truong, T.P.; Cho, S. Content caching in HAP-assisted multi-UAV networks using hierarchical federated learning. J. Phys. Conf. Ser. 2021, 1160–1162. [Google Scholar]
- An, S.; Wang, H.; Sun, Y.; Lu, Z.; Yu, Q. Time Domain Multiplexed LoRa Modulation Waveform Design for IoT Communication. IEEE Commun. Lett. 2022, 26, 838–842. [Google Scholar] [CrossRef]
- Wei, Z.; Liu, F.; Masouros, C.; Poor, H.V. Fundamentals of Physical Layer Anonymous Communications: Sender Detection and Anonymous Precoding. IEEE Trans. Wirel. Commun. 2022, 21, 64–79. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, R.; Wu, L.; Zhong, Z.; He, L.; Pang, X. Path loss measurement and modeling for low-altitude UAV access channels. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- TR 38.901 V14.0.0; 3GPP Technical Specification Group Radio Access Networks; Study on Channel Model for Frequencies from 0.5 to 100 GHz (Release14); Technical Report. ETSI: Sophia Antipolis, France, 2017. Available online: https://www.etsi.org/deliver/etsi_tr/138900_138999/138901/14.00.00_60/tr_138901v140000p.pdf (accessed on 5 May 2017).
- Wang, D.; He, T.; Zhou, F.; Cheng, J.; Zhang, R.; Wu, Q. Outage-Driven Link Selection for Secure Buffer-Aided Networks. Sci. China Inf. Sci. 2022, 65, 1–16. [Google Scholar] [CrossRef]
- Huang, Z.; Cheng, X. A General 3D Space-Time-Frequency Non-Stationary Model for 6G Channels. IEEE Trans. Wirel. Commun. 2021, 20, 535–548. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV Communications via Joint Trajectory and Power Control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef]
- Kang, Z.; You, C.; Zhang, R. 3D Placement for Multi-UAV Relaying: An Iterative Gibbs-Sampling and Block Coordinate Descent Optimization Approach. IEEE Trans. Commun. 2021, 69, 2047–2062. [Google Scholar] [CrossRef]
- Ma, T.; Zhou, H.; Qian, B.; Cheng, N.; Shen, X. UAV-LEO Integrated Backbone: A Ubiquitous Data Collection Approach for B5G Internet of Remote Things Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3491–3505. [Google Scholar] [CrossRef]
- Wu, Y.; Guan, X.; Yang, W.; Wu, Q. UAV Swarm Communication Under Malicious Jamming: Joint Trajectory and Clustering Design. IEEE Wirel. Commun. Lett. 2021, 10, 2264–2268. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, J.; Chung, H.S.; Li, Y.; Liu, O. SamACO: Variable sampling ant colony optimization algorithm for continuous optimization. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2010, 40, 1555–1566. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| set of UAVs or clusters | |
| set of channels | |
| set of NOMA pairs | |
| B | total channel bandwidth |
| subchannel bandwidth of a cluster | |
| subchannel bandwidth of a NOMA pair | |
| transmit power of adjacent/distant user | |
| maximum transmit power of users | |
| transmit power of UAVs | |
| height of UAVs | |
| minimum/maximum height of UAVs | |
| channel power gain from UAVs to HAP or EVE | |
| channel power gain from distant user to UAV or EVE | |
| path loss in user–UAV/UAV–HAP links | |
| Euclidean distance from the user to the UAV | |
| Euclidean distance from the UAV to the HAP | |
| i | iteration of the K-means cluster pair algorithm |
| 2D coordinates of UAVs |
| Parameter | Value |
|---|---|
| Number of UAVs, M | 4 |
| Number of channels, K | 5 |
| Bandwidth of each user, B | 180 kHZ |
| Carrier frequency | 2.1 GHz |
| Coordinates of HAP | |
| Coordinates of EVE | |
| and of UAVs | 50/500 m |
| and of users | 0.1/1 W |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wu, M.; He, Y.; Pang, L.; Xu, Q.; Zhang, R. An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sens. 2022, 14, 4501. https://doi.org/10.3390/rs14184501
Wang D, Wu M, He Y, Pang L, Xu Q, Zhang R. An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sensing. 2022; 14(18):4501. https://doi.org/10.3390/rs14184501
Chicago/Turabian StyleWang, Dawei, Menghan Wu, Yixin He, Linna Pang, Qian Xu, and Ruonan Zhang. 2022. "An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks" Remote Sensing 14, no. 18: 4501. https://doi.org/10.3390/rs14184501
APA StyleWang, D., Wu, M., He, Y., Pang, L., Xu, Q., & Zhang, R. (2022). An HAP and UAVs Collaboration Framework for Uplink Secure Rate Maximization in NOMA-Enabled IoT Networks. Remote Sensing, 14(18), 4501. https://doi.org/10.3390/rs14184501