
A New Approach to Satellite-Derived Bathymetry: An Exercise in Seabed 2030 Coastal Surveys


Abstract
:1. Introduction
Fifty Years of SDB Theory, Trials, and Developments
2. State-of-the-Art
- Before 1983: SDB early trials and field simulations by the French Hydrographic Office. Funded by the Ministry of Defence, these trials were validated by a number of internal reports such as [2] “Study of the bathymetric applications of a blue channel radiometer on board a satellite, using data from an airborne simulation” (1983).
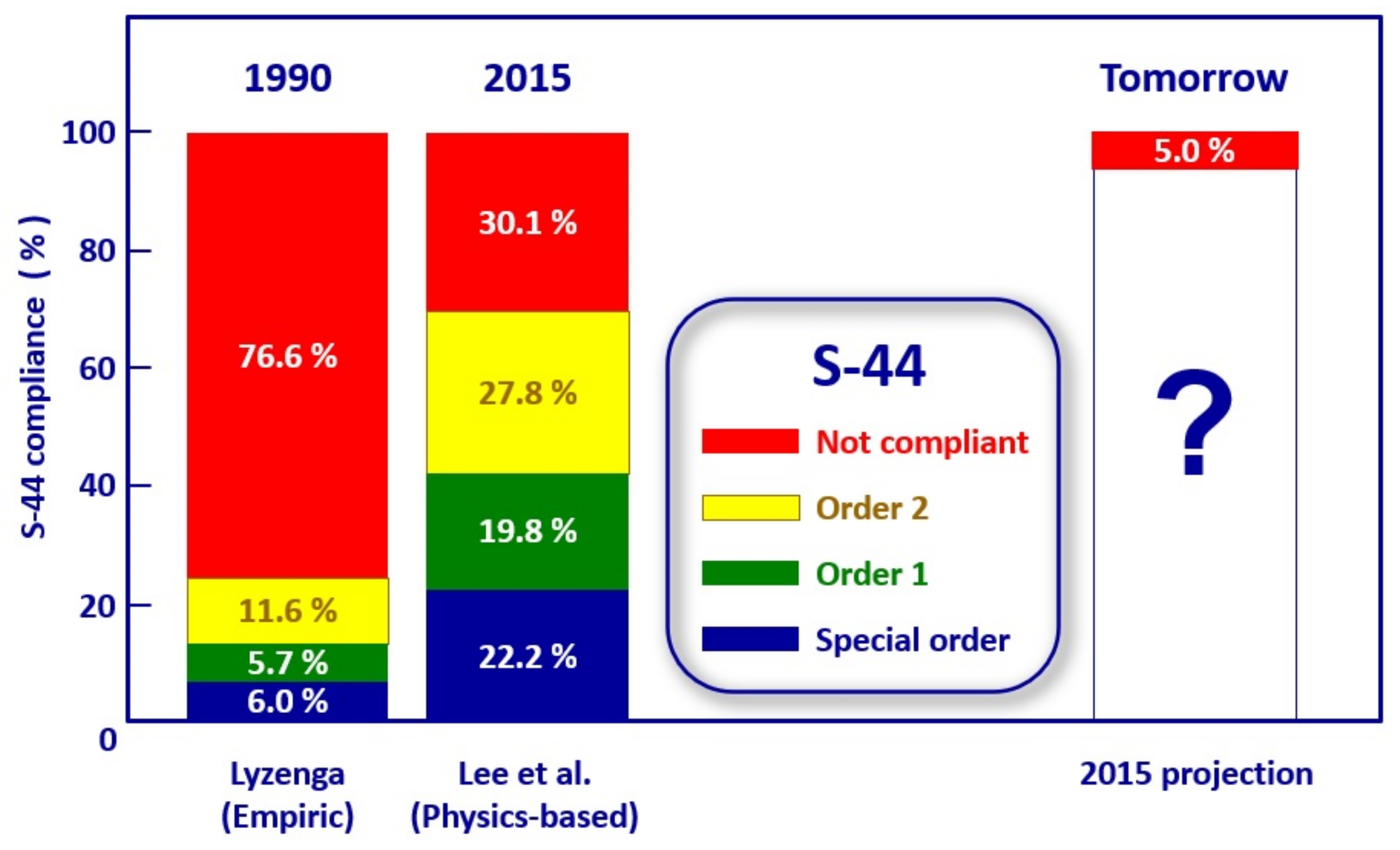
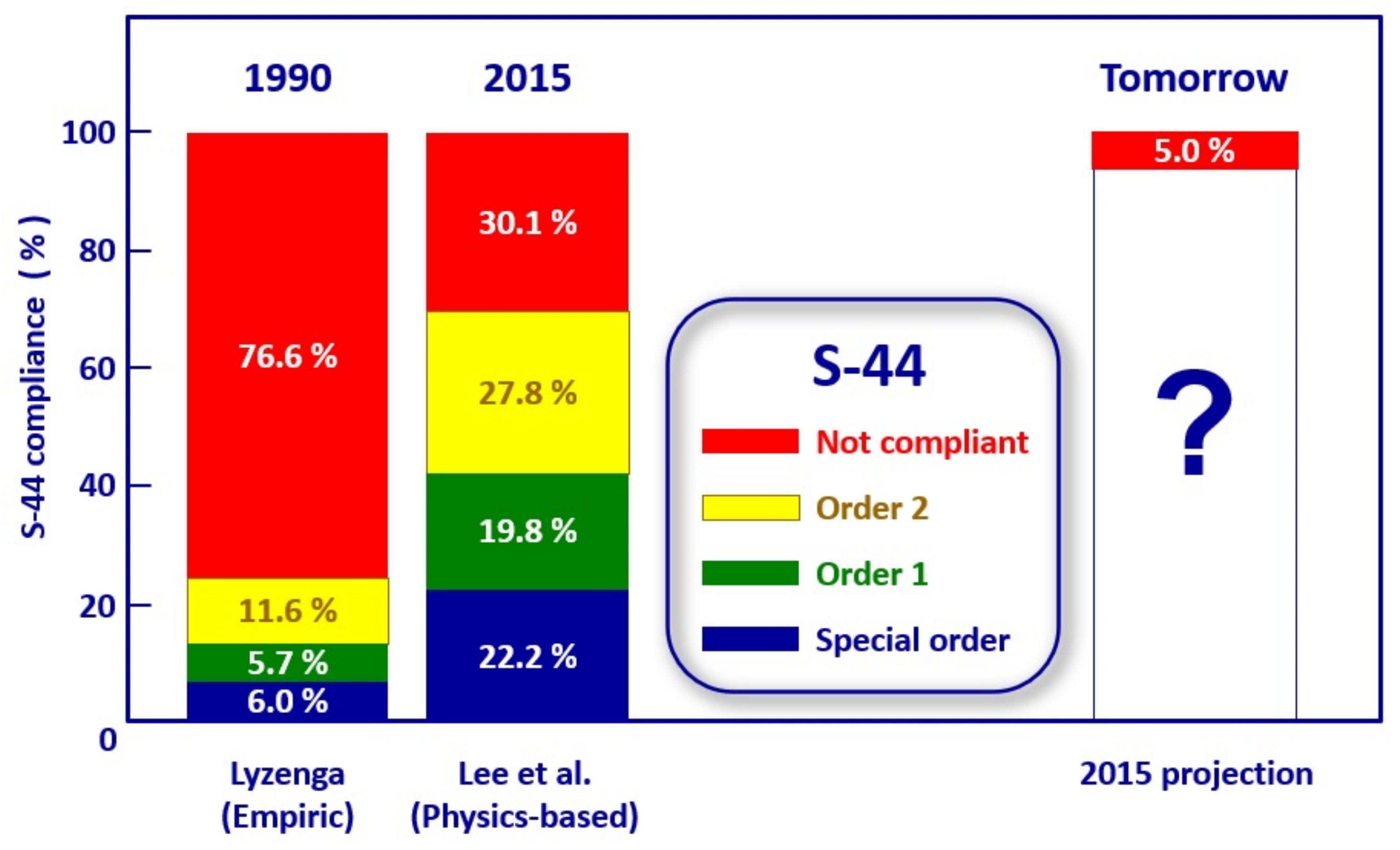
- 1980–1990: Development and implementation of the Lyzenga empiric method in the coral waters of New Caledonia and French Polynesia.
- 1990: First publication of the SDB chart of Ouvea in a national chart series.
- 1990–2019: Dissemination of SDB worldwide and subsequent implementation of the Lee et al. physics-based method. SDB methodology spreads amongst HOs and commercial service providers.
- 2019–2022: Introduction in the UK of a statistical method backed by machine learning to complement the traditional SDB methodologies.
3. Objectives
A Novel SDB Approach Based on the Exploitation of Statistics
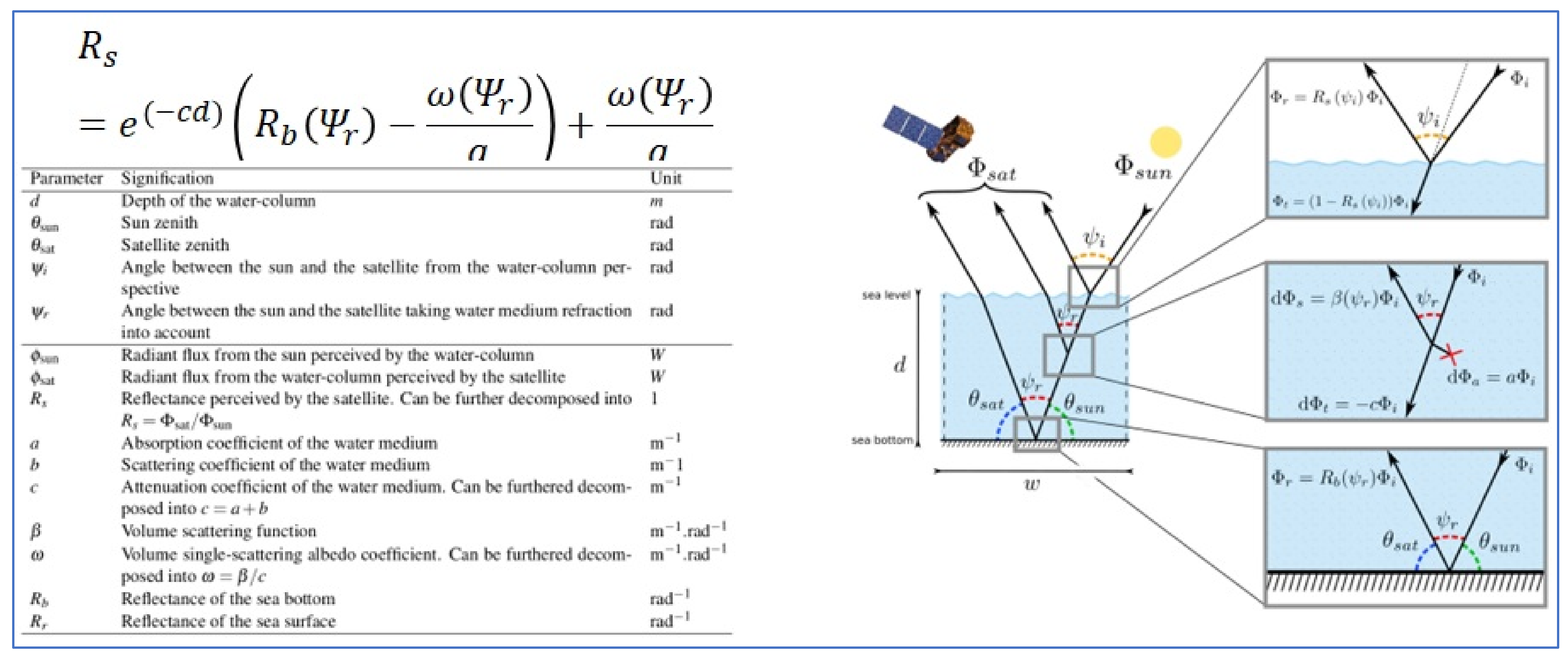
4. WCPE Method
4.1. Starting Point and Scope
- It bundles up all the main meaningful physical parameters scientists are interested in.
- It is easy to invert to estimate the depth.
- It is valid for every spectral band (although some are marginally better to use than others).
- It is free of arbitrary empirical coefficients.
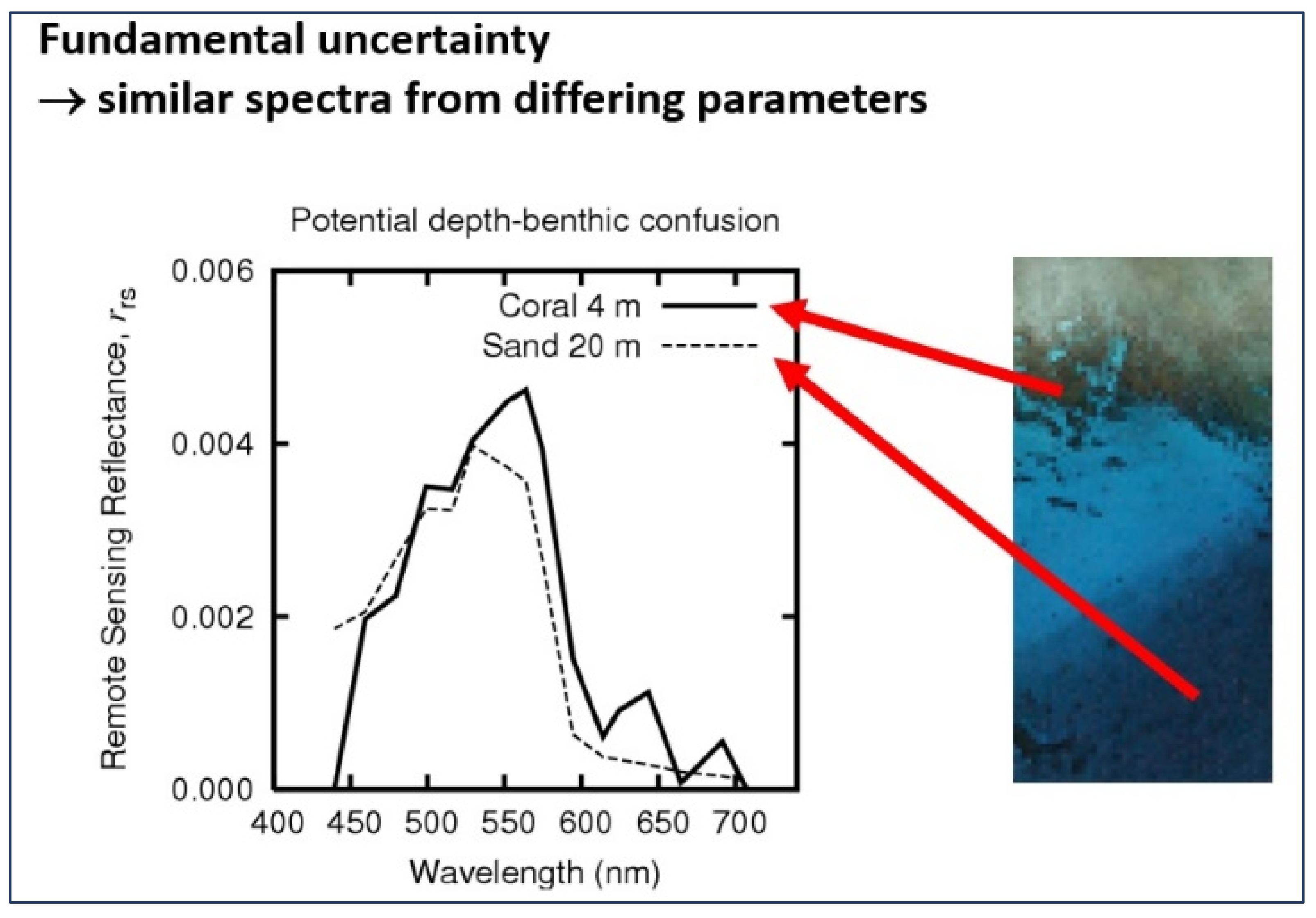
- The first problem: as seen earlier, certain water-column profiles may exhibit the same radiance but have incompatible depths, thus leading to ambiguities about the resulting bathymetry.
- The second problem: when trying to retrieve depths, several a priori are required because the equation is severely underdetermined and unresolved members must be parameterised. Some of those parameters are very difficult to obtain, e.g., attenuation coefficients, seafloor reflectances).
- Other difficulties that add to the challenge of deriving bathymetry include:
- Proper calibration of satellite images.
- Proper removal of atmospheric effects in coastal environments.
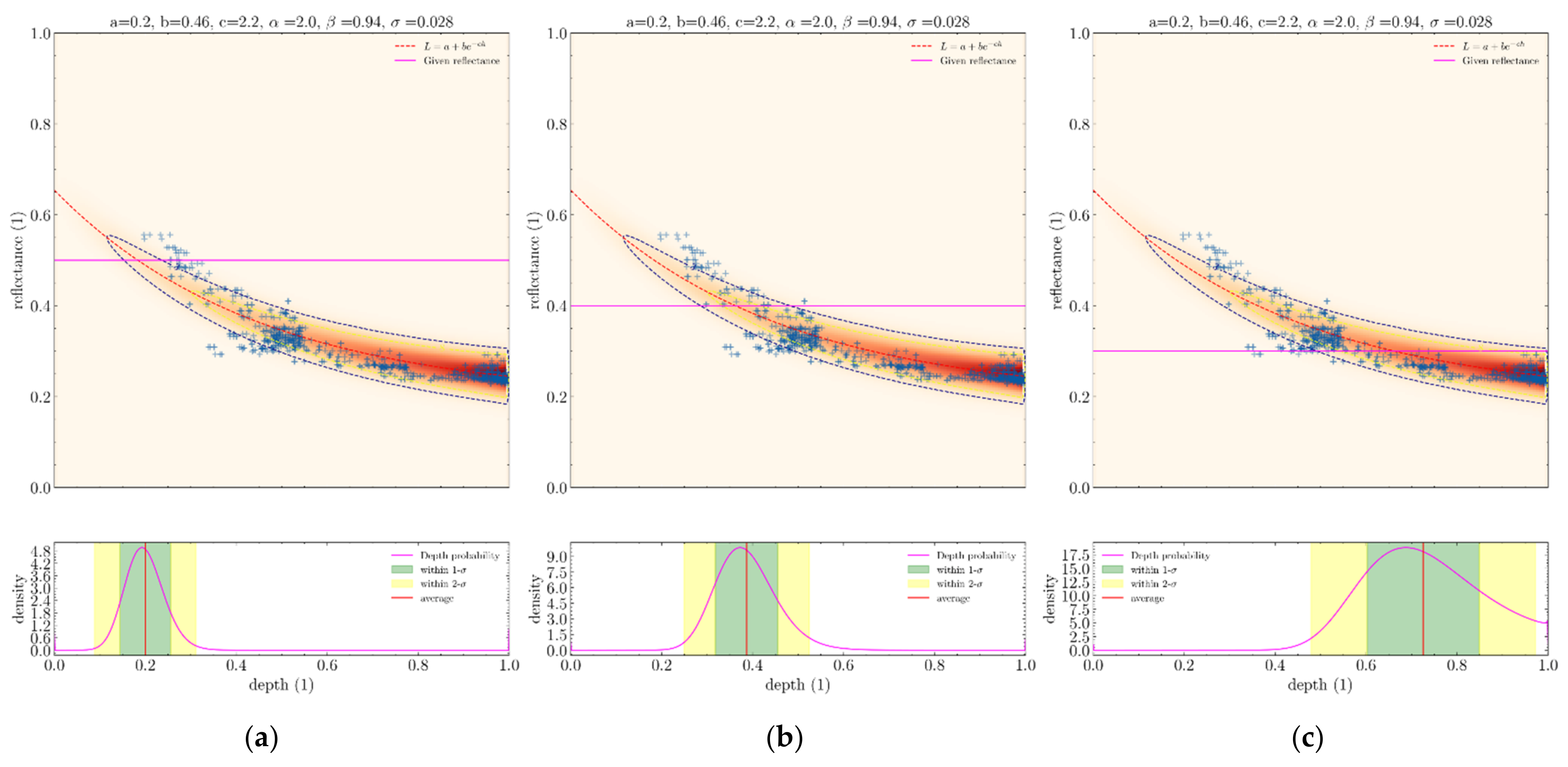
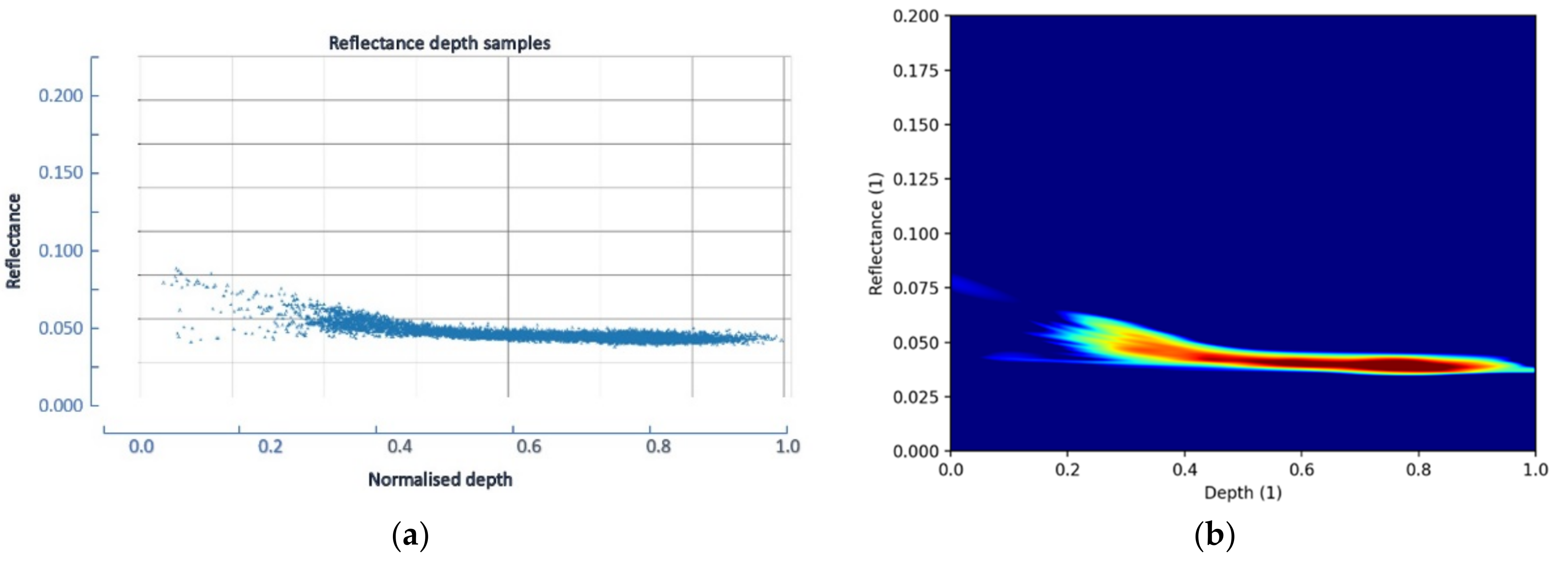
4.2. Single Spectrum Beta-Normal-Polynomial-Exponential Distribution
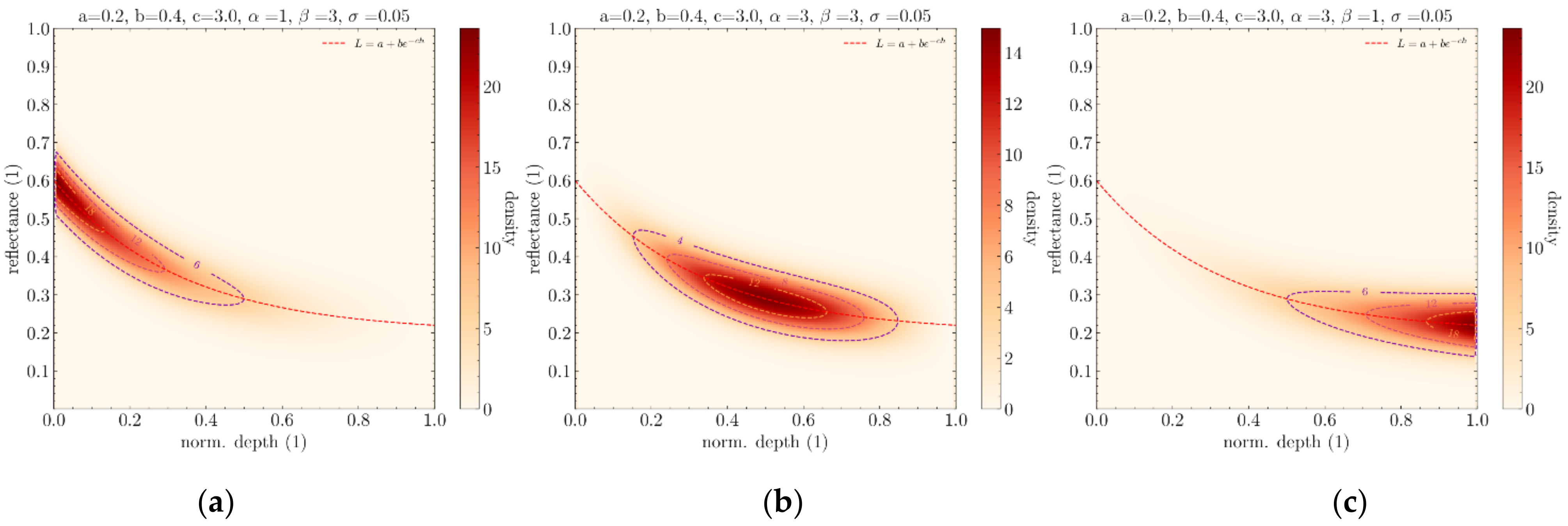
4.2.1. Definition
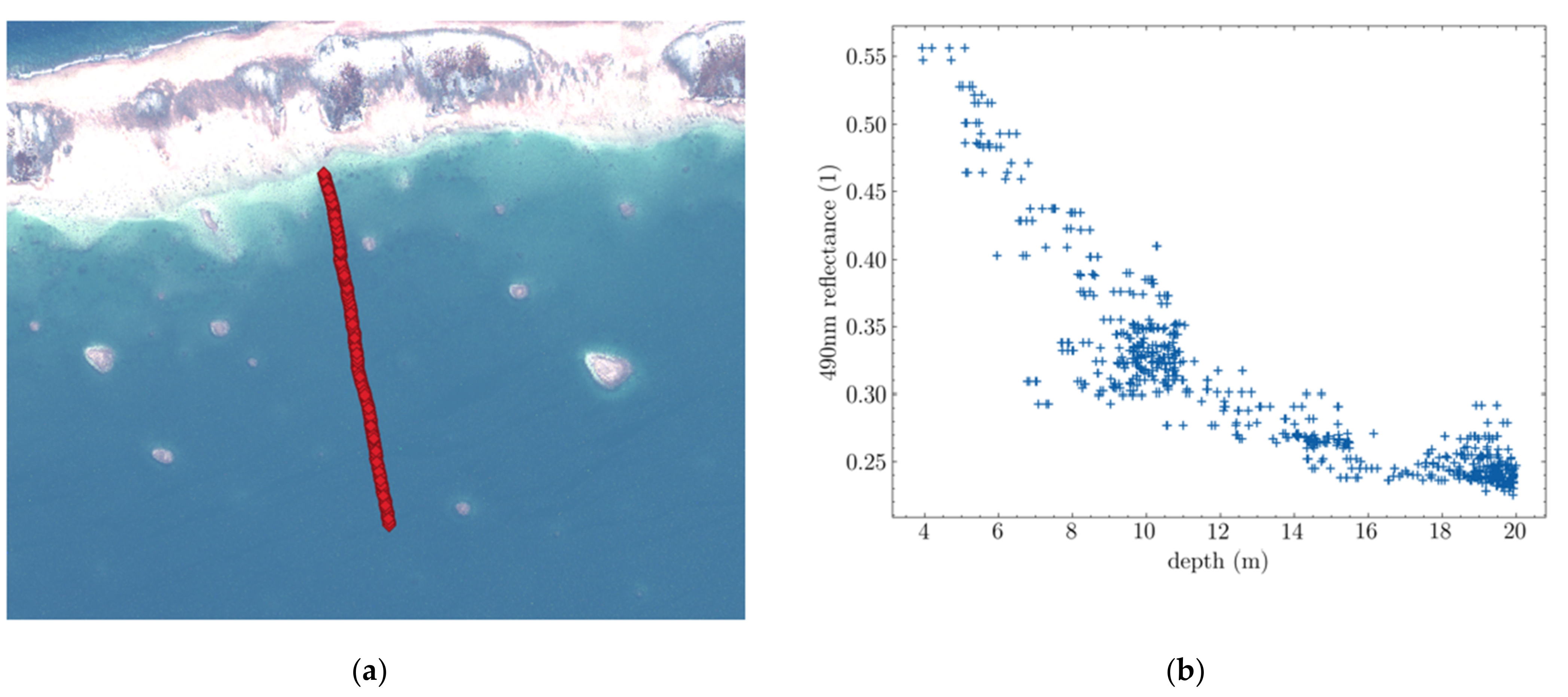
4.2.2. Relations between BNP Distributions and In Situ Depth Reflectances
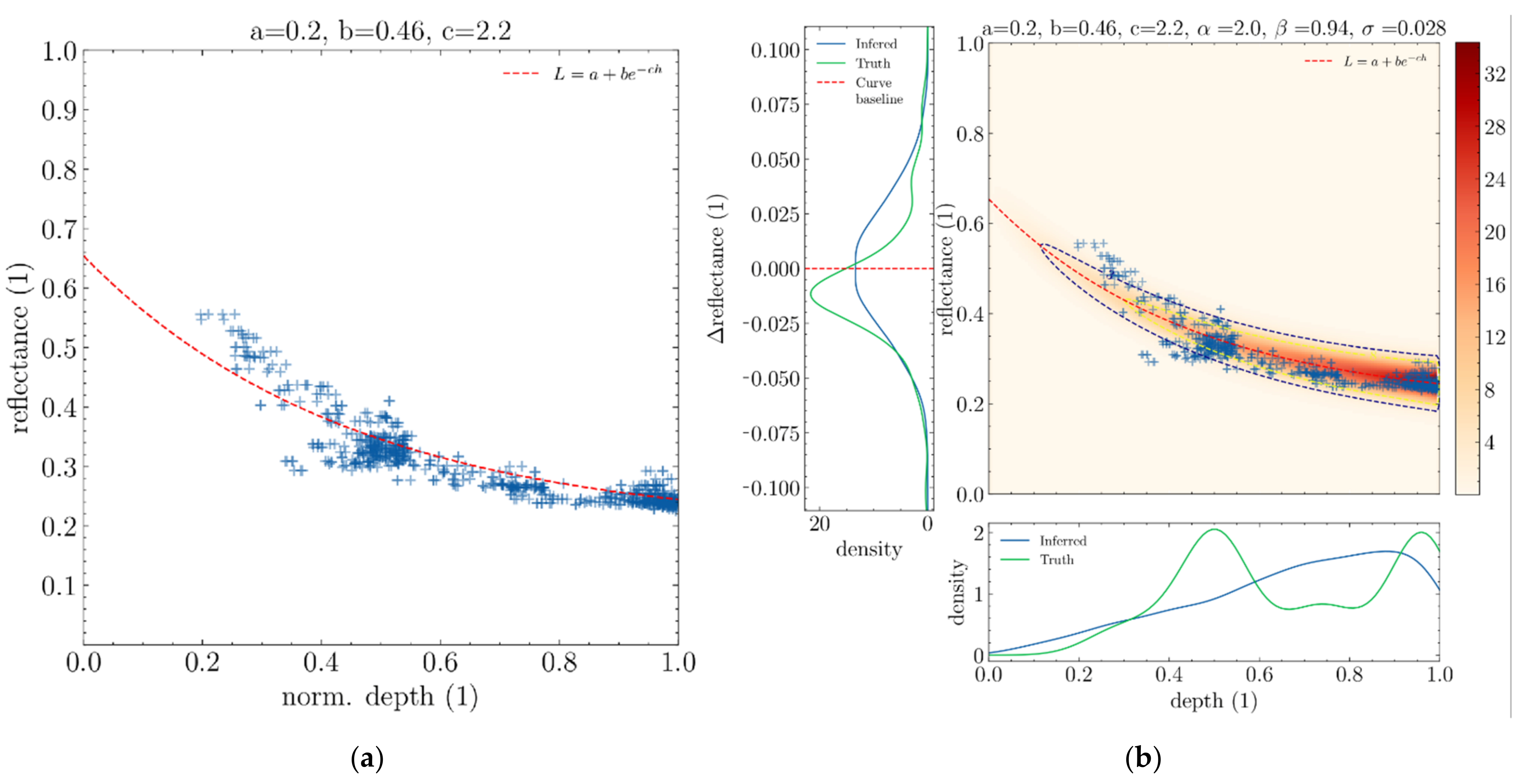
4.2.3. BNP Parameter Regression
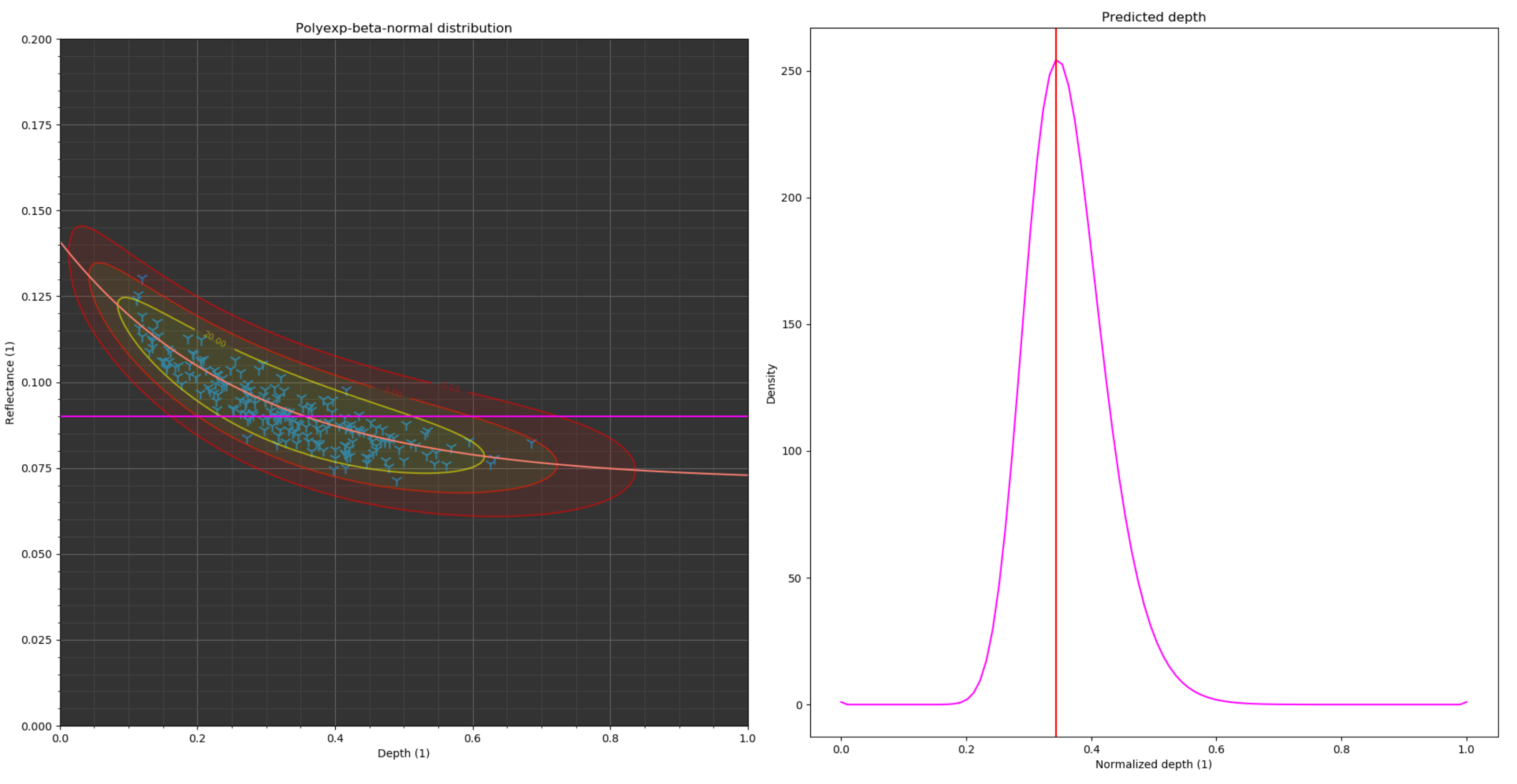
4.2.4. Depth Inference
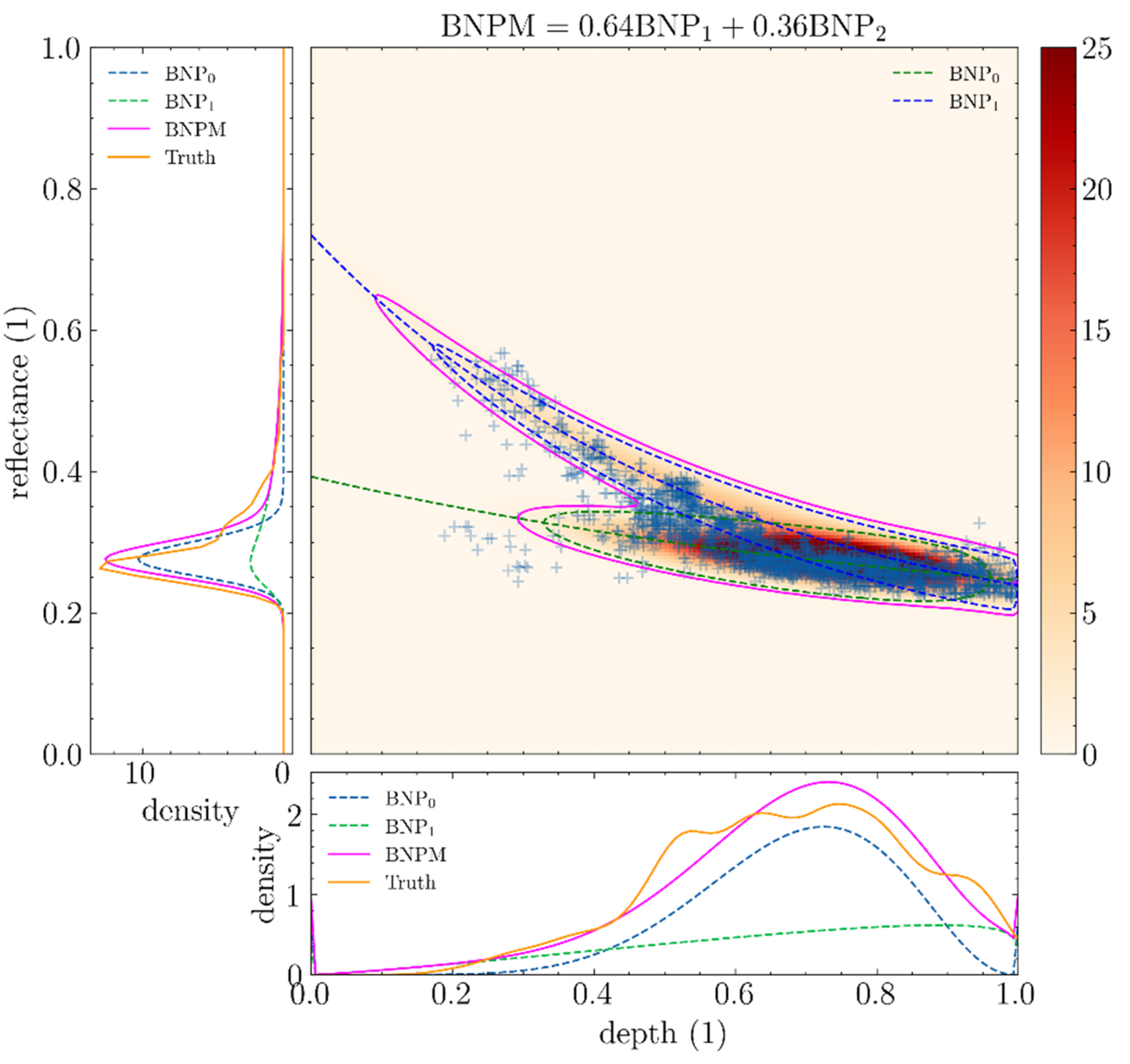
4.3. Single-Spectrum BNP Mixtures
4.3.1. Definition
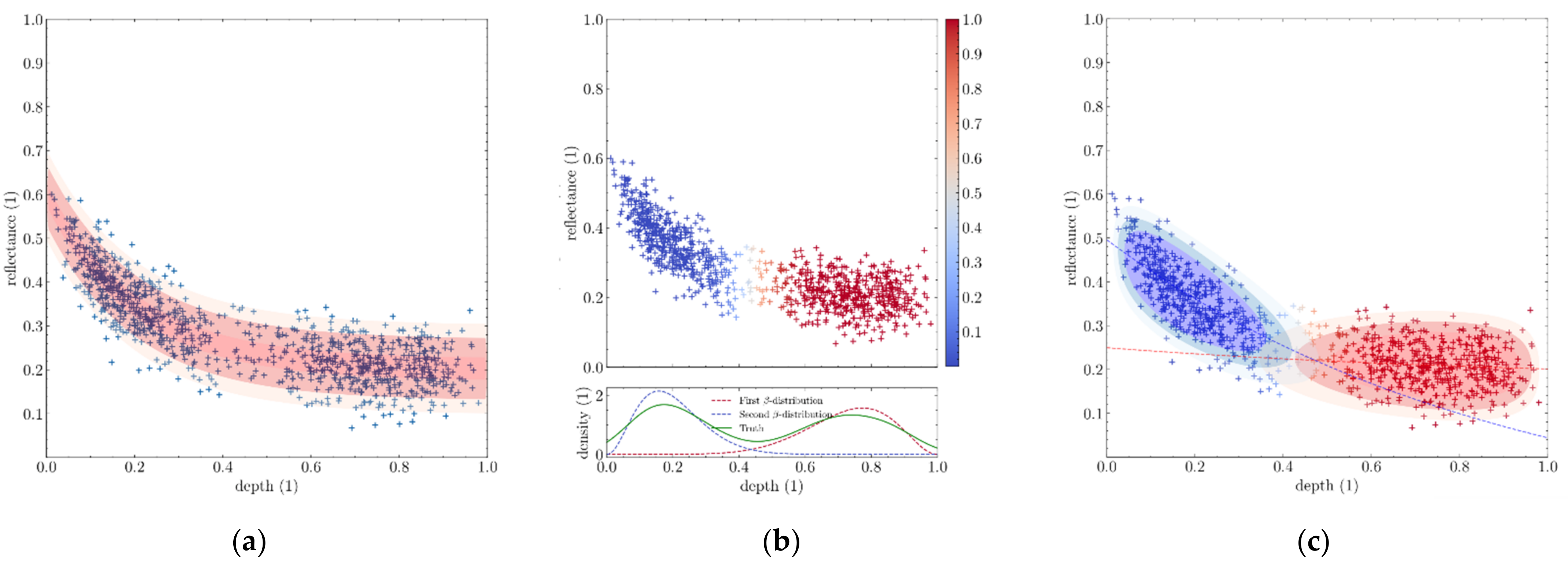
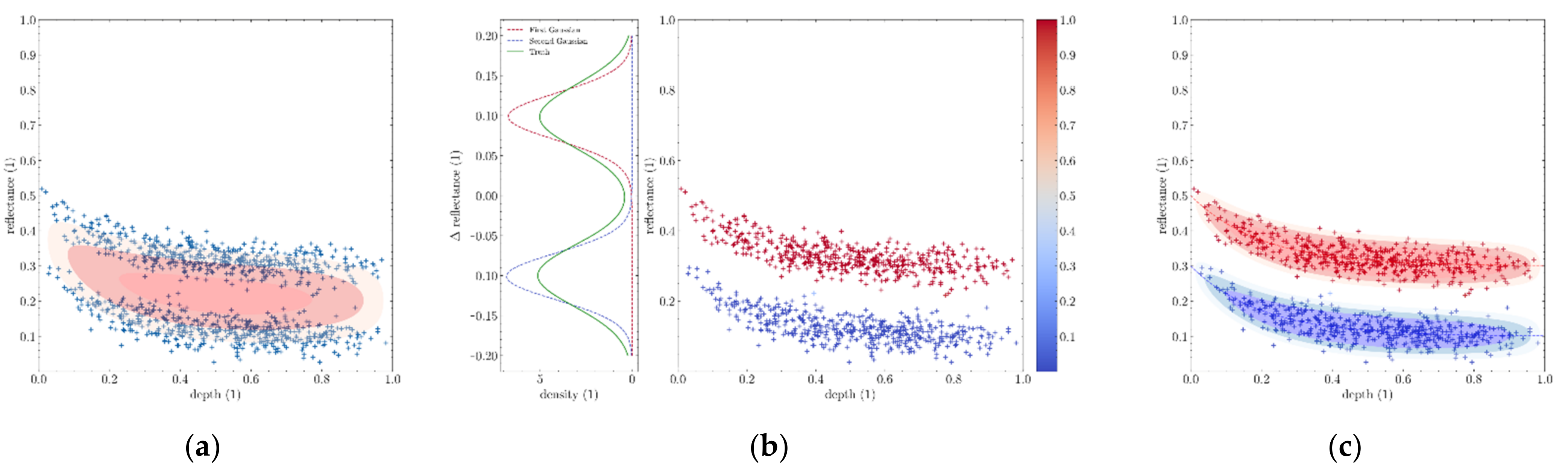
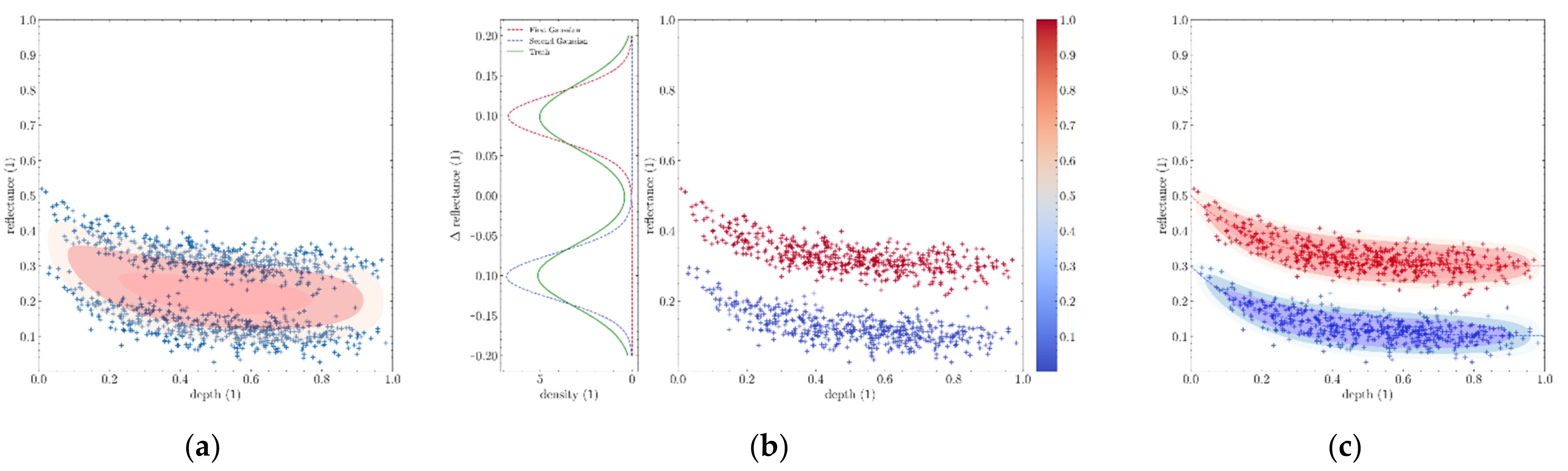
4.3.2. BNP Mixture Regression
- Splits along the reflectance axis, using the distribution of offsets of training samples relative to the curve of the BNP considered.
- Splits along the depth’s axis, using the distribution of depths of the training samples.
- Keep the original BNP. No split occurs.
- Use the BNP mixture resulting from the split along the reflectance axis.
- Use the BNP mixture resulting from the split along the depths axis.
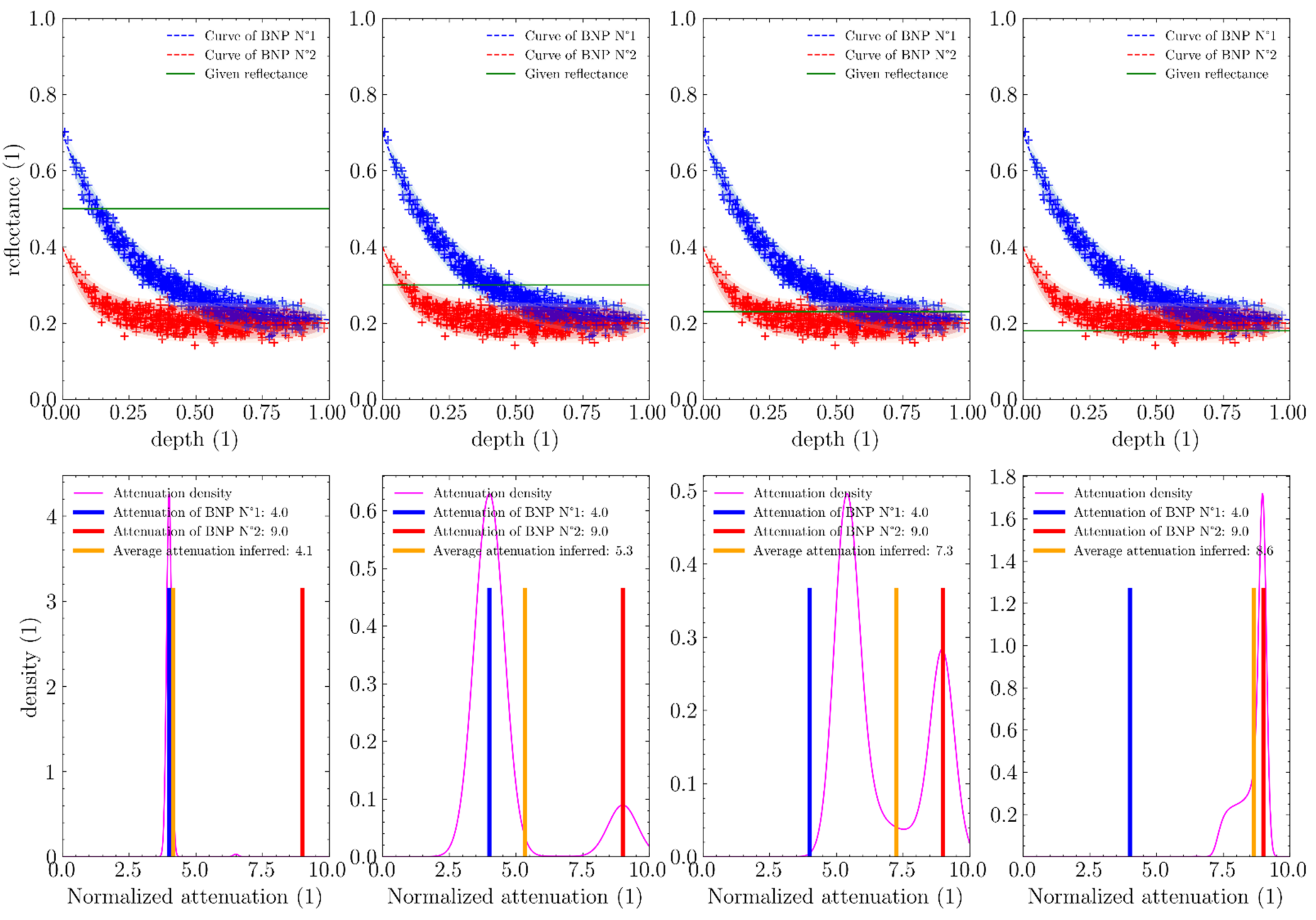
4.3.3. Inferring Depths and Specific Physical Parameters
- -
- → deep-sea reflectance.
- -
- → seafloor reflectance.
- -
- with a coefficient dependent on the scene geometry → attenuation coefficient.
- -
- with the minimum discriminating reflectance quanta (dependent on the signal-noise ratio of the instrument used) → cut-off depth/depth of penetration.
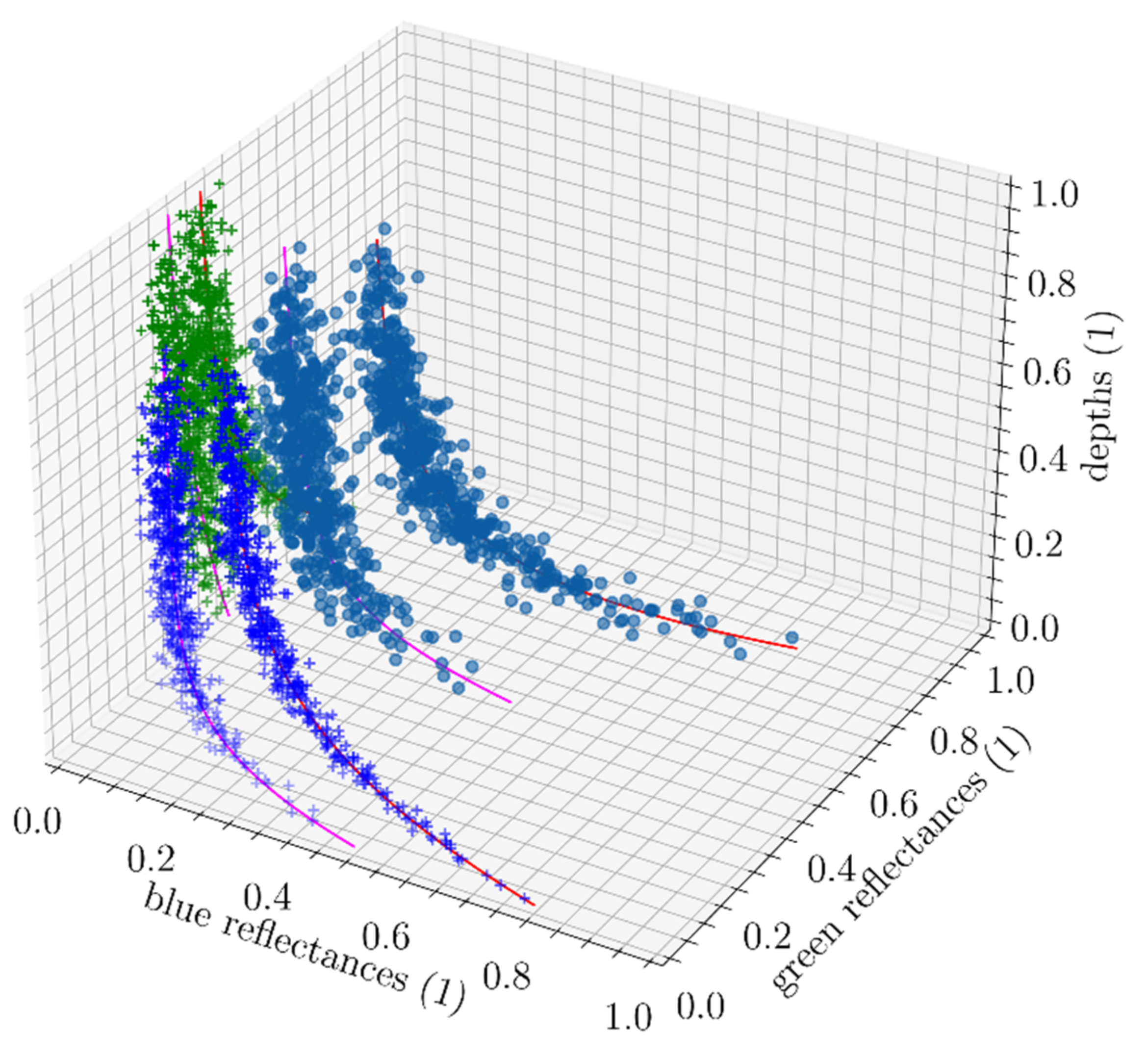
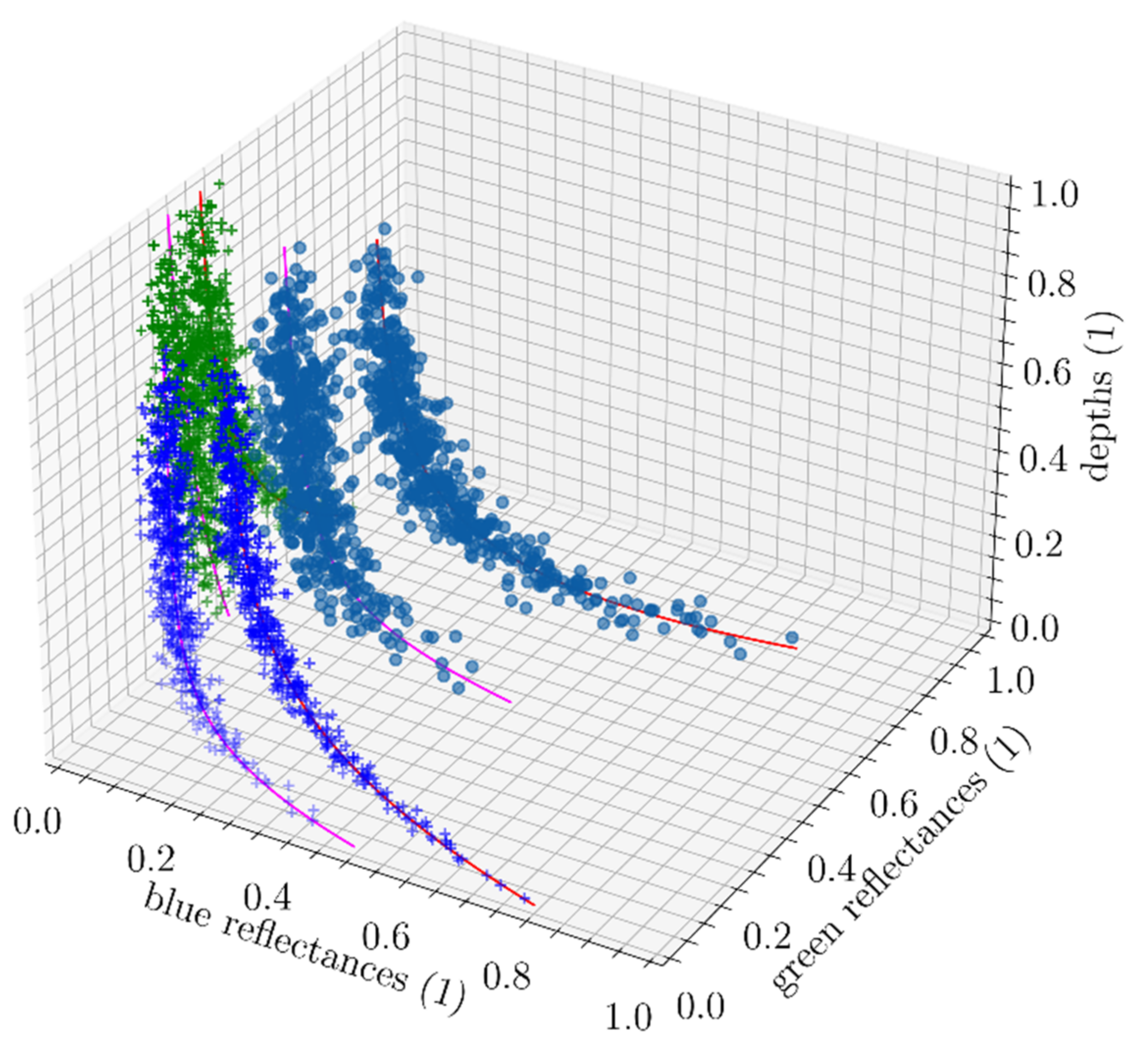
4.4. Multi-Spectral BNP Mixtures
4.5. Evolution of WCPE
4.5.1. Handling of Ambiguous Cases
4.5.2. Deriving Depth in Uncharted Locations
- An adequacy score is computed between each raster from charted locations and the raster for which we want to infer new depths.
- Adequacy scores are used with a function that associates a weight to each of them, the total amount of weights summing up to 100%.
- Reflectances and depth values are sampled from each charted location and combined given those weights.
- A WCPE model is trained using those values.
- Only selecting the location with the highest adequacy score (akin to argmax).
- Using adequacy scores as is, with just a normalisation process so they sum up to 100 (akin to 1-norm) %.
- Only selecting the n most adequate locations, with n an arbitrary number.
- The most basic one consists of randomly selecting available depth-reflectance samples.
- A more accurate one is to compute the likelihood of each available depth-reflectance sample with the mixture trained for the raster of the uncharted region and then resample among all samples using those as weights.
5. Results
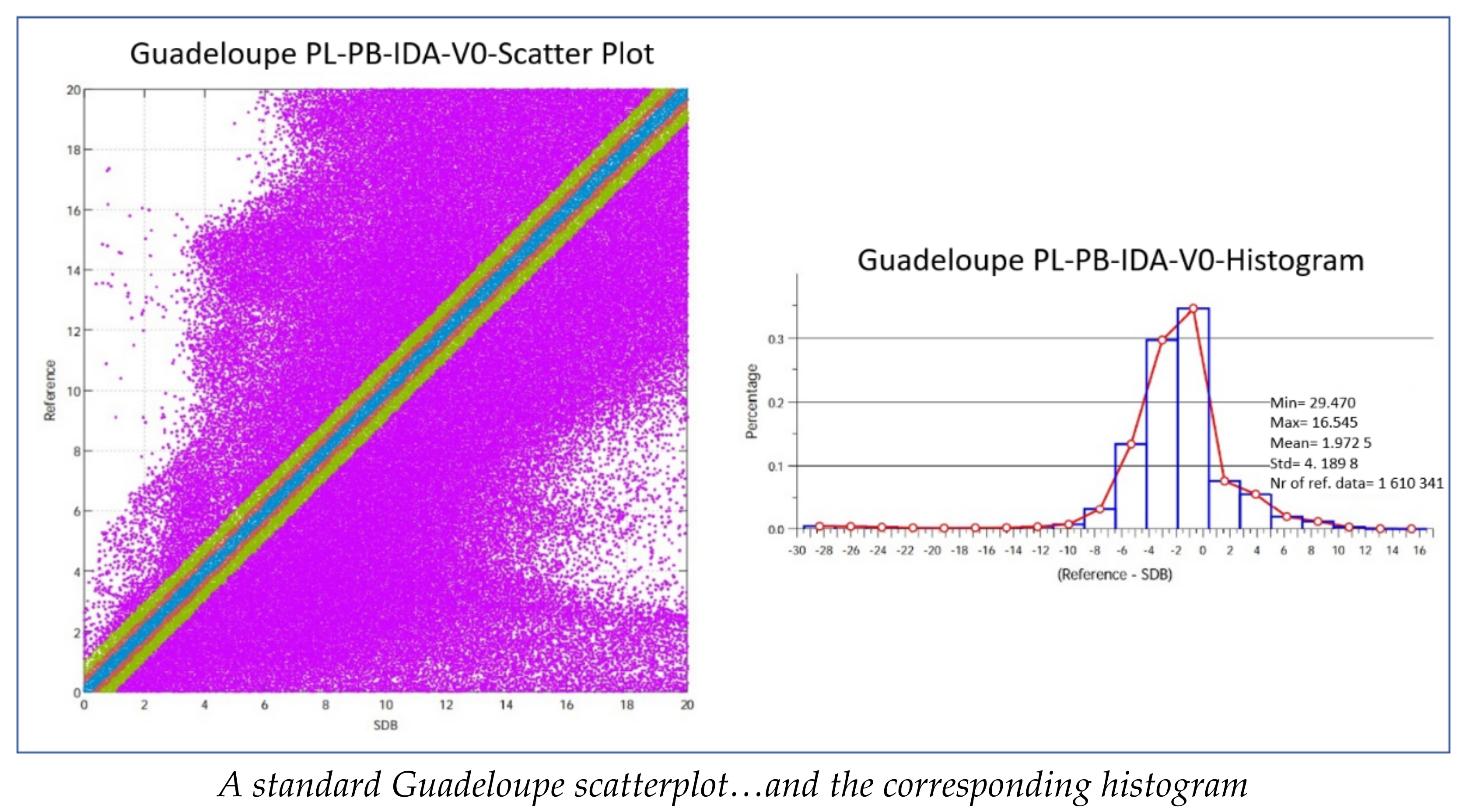
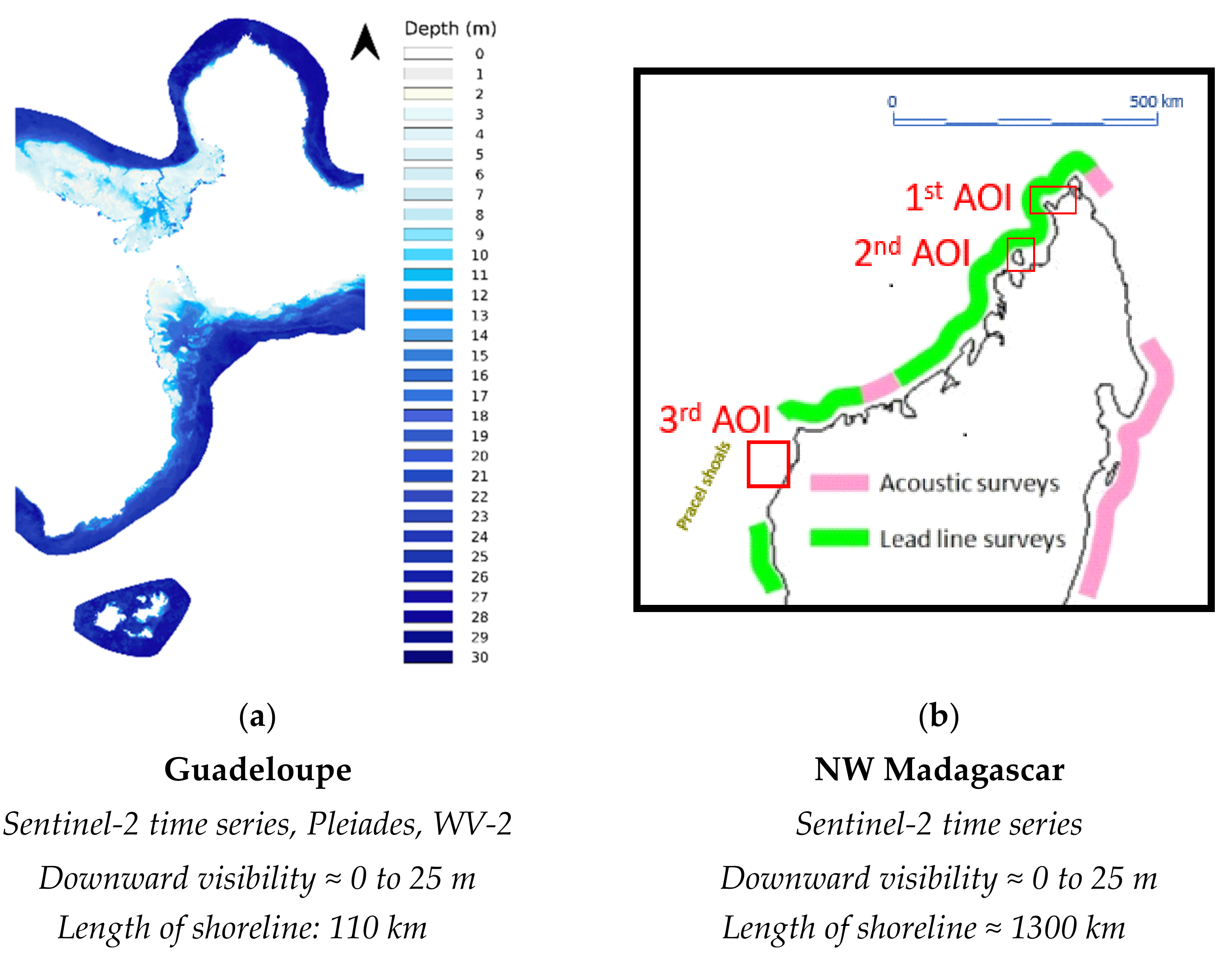
5.1. Guadeloupe First Implementation
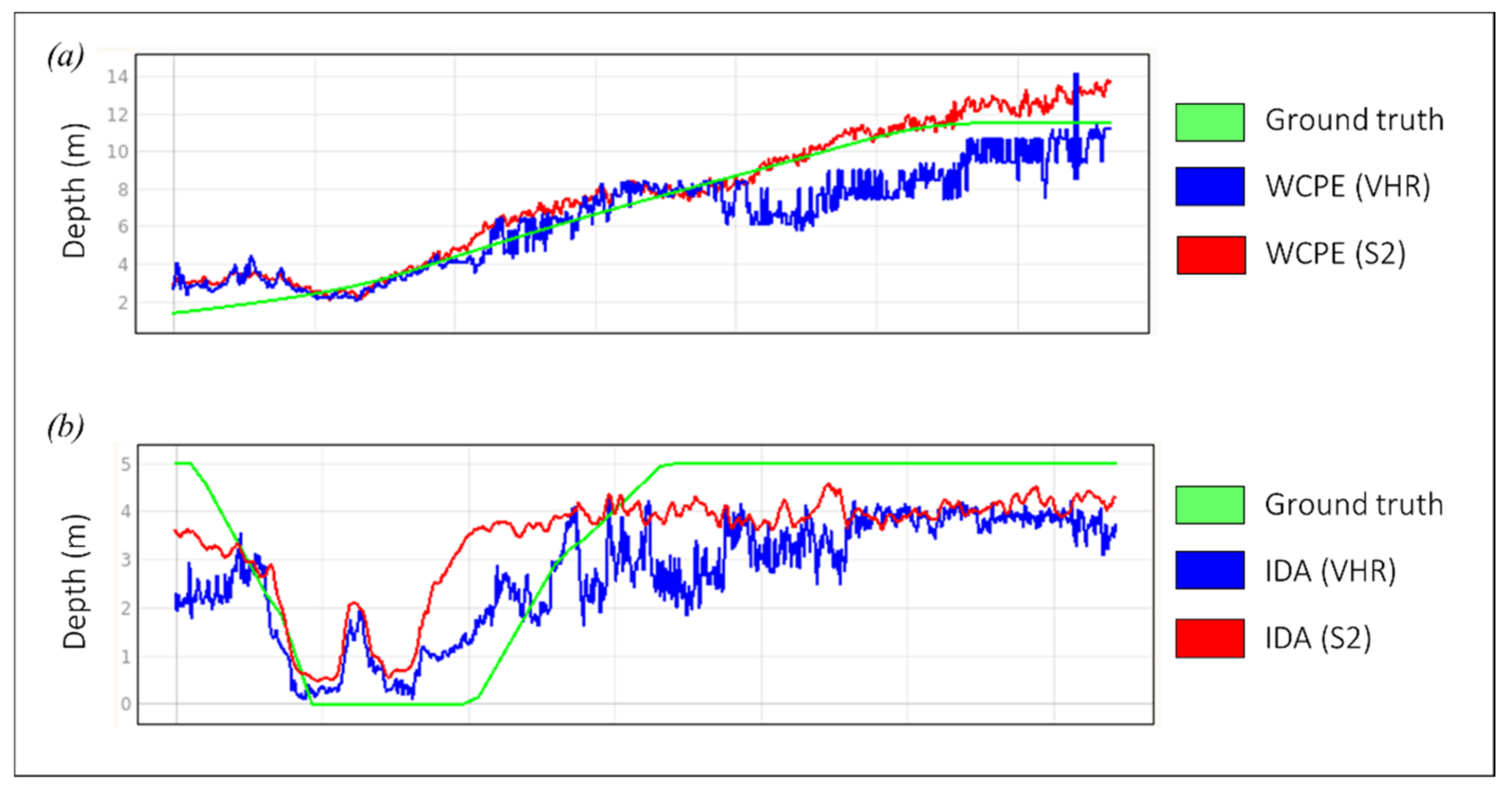
- The bathymetric models determined by Sentinel-2 time series are far superior to those yielded by individual VHR images.
- Large areas of interest must be split into homogeneous subzones characterised by similar environments. This requires a preliminary first analysis and sufficient comparisons with ground truths to qualify the subzones.
- There is a need to replay the qualifications, which requires methods and software.
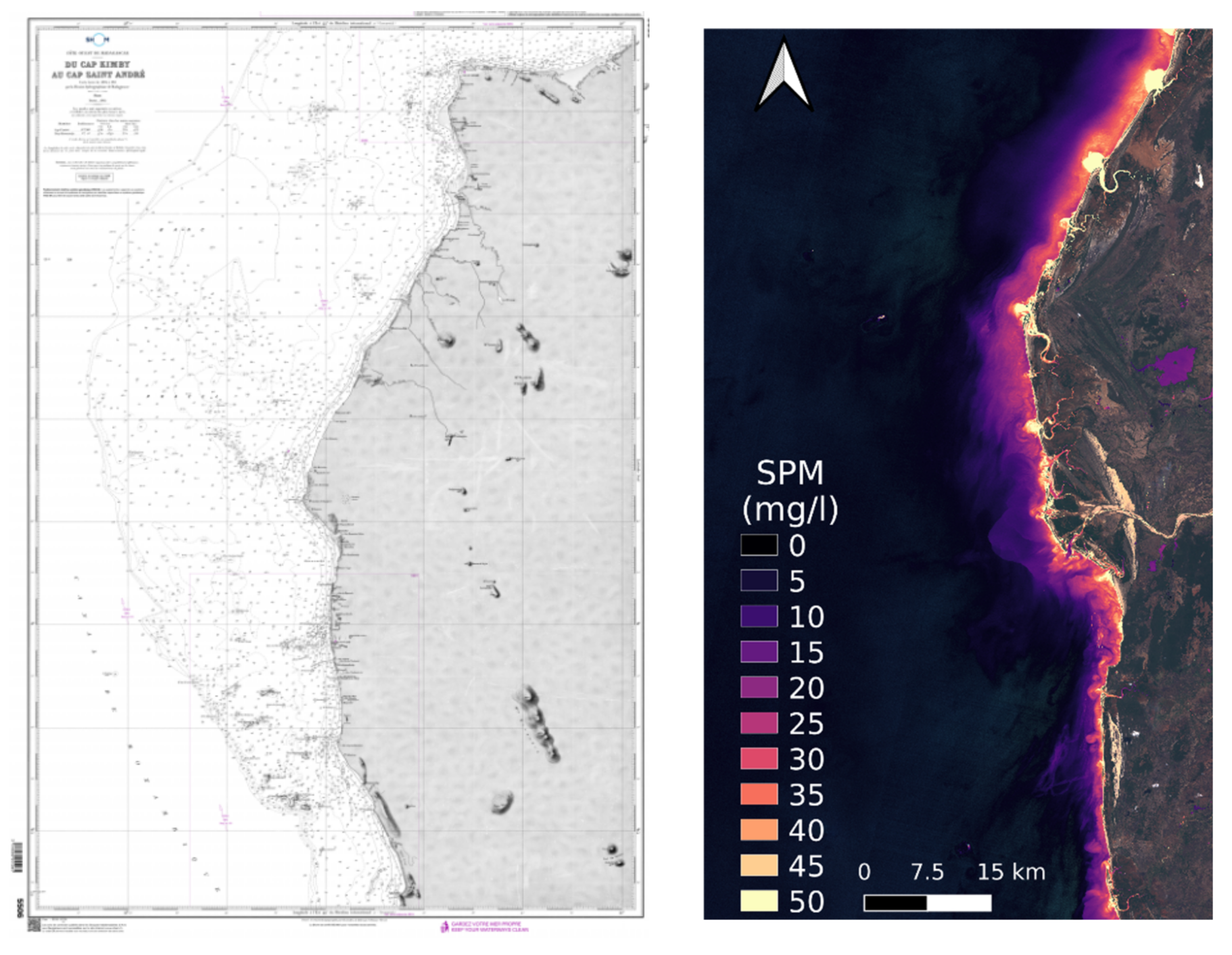
5.2. Madagascar Test Bed: A First Attempt to Survey a Very Large Area
- Regardless of the merits of the Hydrolight simulation tool, and despite numerous publications, the traditional models of Lee et al. proved insufficient and ill-suited to evolve the SDB methodology. The need to develop an entirely different approach based on statistics was clearly demonstrated by this experiment.
- Once again, the superiority of Sentinel-2 time series over VHR individual images for coastal bathymetry was confirmed, not to mention the value-for-money criteria.
- The need to develop and implement a correction model to mitigate the effects of turbidity became apparent. A way ahead consisting of applying a simple correction to depth depending on the concentration of suspended particular matter was envisaged but could not be completed at this stage.
5.3. A Polynesian Textbook Case: The Tahanea Testbed
5.3.1. Pleiades Results
5.3.2. WorldView Results
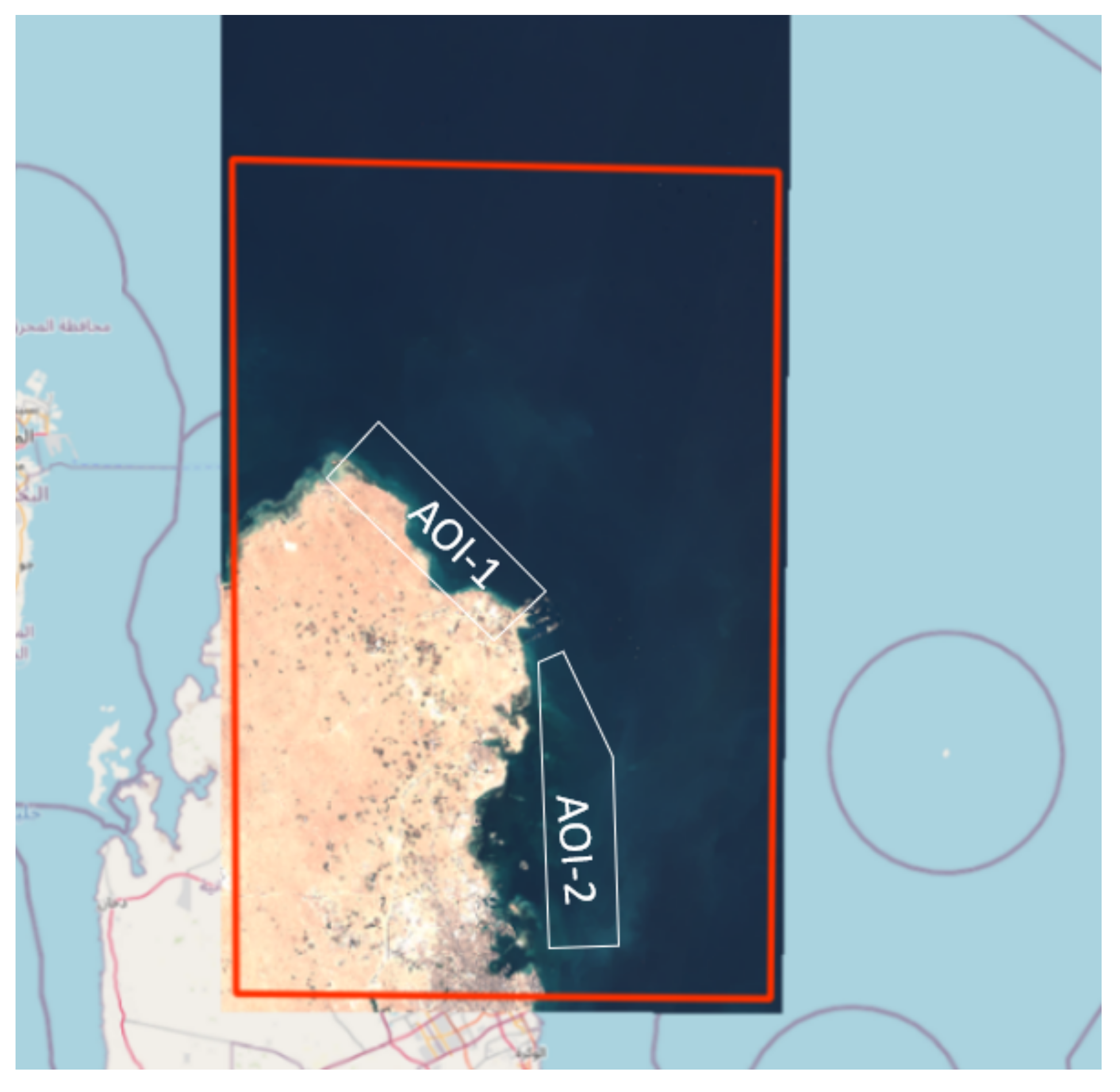
5.4. The Qatar Test Bed
5.4.1. An Experience Centred on Safety of Navigation
- ARGANS new WCPE statistical model against a traditional Lee et al. RTE model (IDA).
- Selection of high resolution against very-high-resolution images for optimised comparisons.
- Comparison between Sentinel-2 time series against metric to sub-metric commercial images.
- Guided investigation of known charted obstructions with very-high-resolution images (WV, Spot6, Planet scope, Pleiades, etc.).
5.4.2. Nautical-Chart-Guided Investigation of Potentially Dangerous Features
6. Discussion
6.1. HR or VHR Images?
6.2. The WCPE New Paradigm and Points That Need Reinforcing
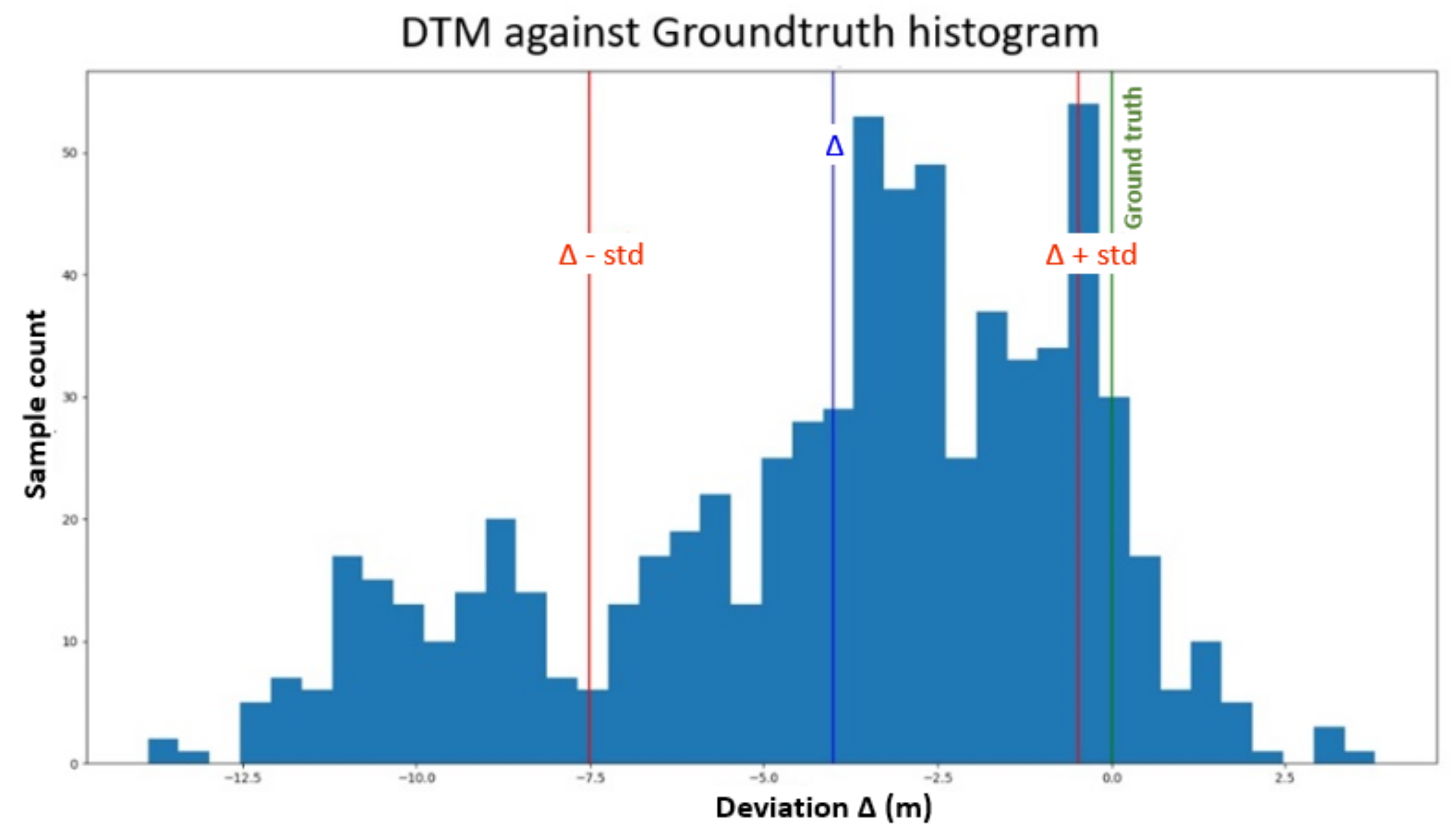
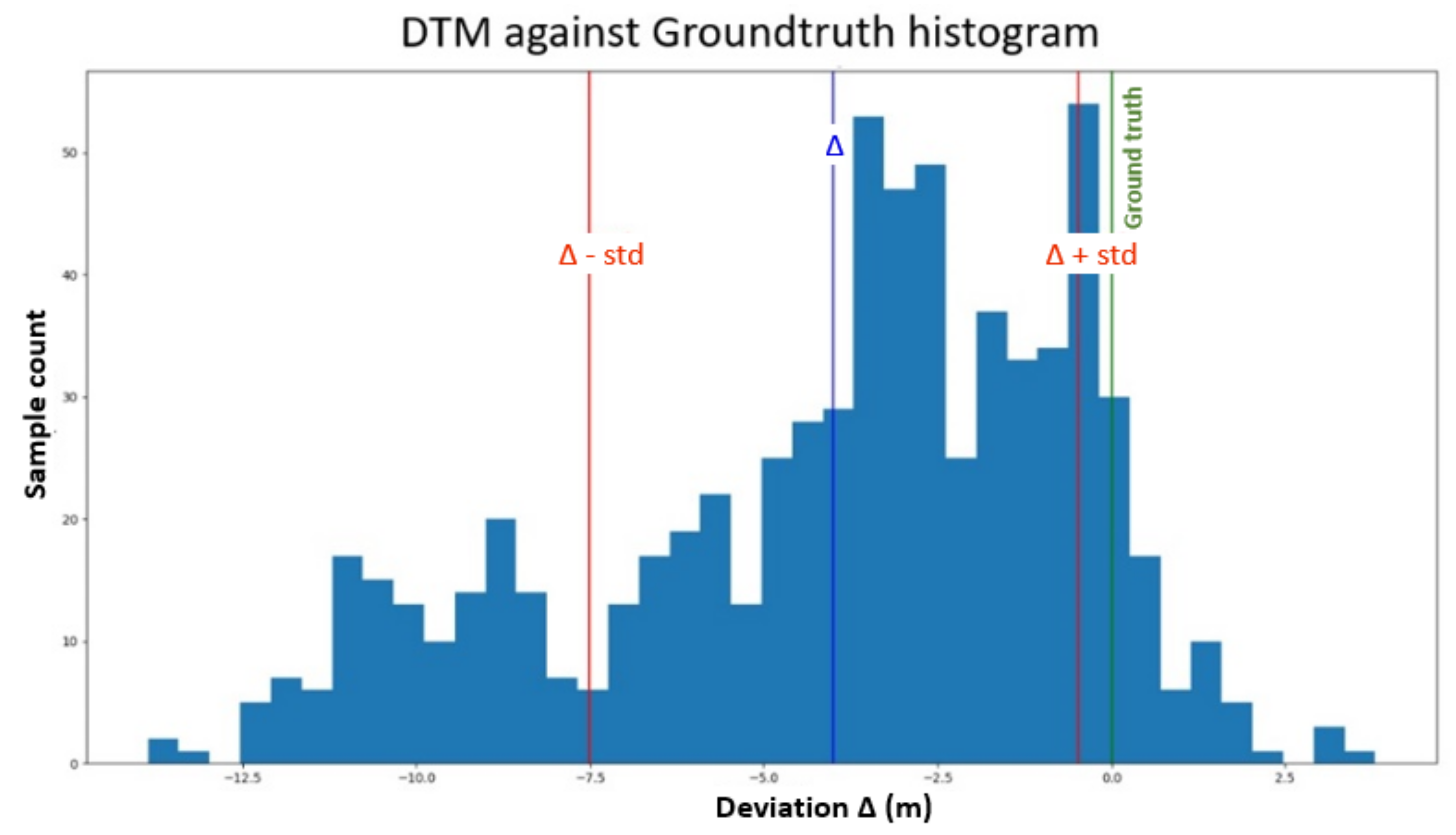
6.3. Uncertainties of Results
7. Conclusions
- The proven ability of Sentinel-2 models, above the light penetration threshold, to provide depths to an order of accuracy of about one metre, without bias. The consequence of this potential revolution is being recognised with difficulty by professional users who tend to abandon the task of developing their own expertise and rely more and more on blind commercial contracts with service providers.
- The confirmation that high-resolution public time series such as Sentinel-2 achieve far better results than individual commercial VHR images plagued by biases and noise when used on their own, not to mention cost considerations.
- However, VHR model biases can be improved by association with lesser resolution models inferred from time series.
- The disappointing capacity of satellite images at this stage of development, whatever the resolution, to detect small structures with sufficient guarantee to abide by IHO safety of navigation standards embodied in the S-44 publication.
- WCPE parameters and inferred models can be propagated theoretically from a proven area to the next without requiring further ground controls. This outstanding asset must be tested further and the algorithms developed accordingly.
- Thanks to free public imagery, SDB has the proven capacity to meet the Seabed 2030 requirements for very affordable costs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations and Acronyms
| AOI | Area of Interest ≈ ROI |
| ARGANS | Applied Research in Geomatics, Atmosphere, Nature and Space |
| ATBD | Algorithm Theoretical Baseline Document |
| BNP(s) | Beta-Normal-Polynomials |
| Cal/Val | Calibration/Validation |
| COD | Cut-Off Depth |
| DOP | Depth of Penetration |
| DTM | Digital Terrain Models |
| EM | Expectation-Maximisation |
| ENC | Electronic Navigational Chart |
| EO | Earth Observation |
| ESA | European Space Agency |
| GEBCO | General Bathymetric Chart of the Oceans |
| HO(s) | Hydrographic Office(s) |
| HR | High Resolution |
| IDA | Image Data Analysis |
| IHO | International Hydrographic Organisation |
| IOP | Intrinsic Optical Properties |
| LUT | Look-Up Table |
| MBES | Multibeam Echo Sounder |
| ML | Machine Learning |
| Probability Density Function | |
| ROI | Region of Interest ≈ AOI |
| RTE | Radiative Transfer Equation |
| SDB | Satellite-Derived Bathymetry |
| SHOM | Service Hydrographique de la Marine (i.e., the French HO) |
| SNR | Signal-to-Noise Ratio |
| SPM | Suspended particulate matter |
| Std | Standard deviation |
| S-44 | Standards for Hydrographic Surveys, an IHO publication |
| UKHO | United Kingdom Hydrographic Office |
| UNet | Convolutional neural network |
| VHR | Very High Resolution |
| WCPE | Water Column Parameter Estimator |
| WV | WorldView |
References
- Le Gouic, M. Etude des Applications Bathymétriques d’un Radiomètre Canal Bleu Embarqué sur Satellite, à Partir des Données d’une Simulation Aéroportée; Rapport D’étude n° 0002/85 EPSHOM: 21 p.; SHOM: Brest, France, 1983. [Google Scholar]
- Laporte, J.; Dolou, H.; Avis, J.; Arino, O. Thirty years of Satellite Derived Bathymetry: The charting tool that Hydrographers can no longer ignore. Int. Hydrogr. Rev. 2020, 25, 129–154. [Google Scholar]
- Polcyn, F.C.; Brown, W.L.; Sattinger, I.J. The Measurement of Water Depth by Remote Sensing Techniques; Michigan University Ann Arbor Institute of Science and Technology: Ann Arbor, MI, USA, 1970. [Google Scholar]
- Lyzenga, D.R. Analysis of cladophora distribution in lake Ontario using remote sensing. Remote Sens. Environ. 1975, 4, 37–48. [Google Scholar]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J. Hyperspectral remote sensing for shallow waters. I. A semianalytical model. Appl. Opt. 1998, 37, 6329–6338. [Google Scholar] [PubMed]
- Hedley, J.; Roelfsema, C.; Phinn, S.R. Efficient radiative transfer model inversion for remote sensing applications. Remote Sens. Environ. 2009, 113, 2527–2532. [Google Scholar] [CrossRef]
- Malinas, N.P.; Lyzenga, D.R.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar]
- Byrd, R.H.; Lu, P.; Nocedal, J.; Zhu, C. A limited memory algorithm for bound constrained optimization. SIAM J. Sci. Stat. Comput. 1995, 16, 1190–1208. [Google Scholar] [CrossRef]
- Zhu, C.; Byrd, R.H.; Nocedal, J. L-bfgs-b: Algorithm 778: L-bfgs-b, fortran routines for large scale bound constrained optimizationn. ACM Trans. Math. Softw. 1997, 23, 550–560. [Google Scholar] [CrossRef]
- Morales, J.L.; Nocedal, J. L-bfgs-b: Remark on algorithm 778: L-bfgs-b, fortran routines for large scale bound constrained optimization. ACM Trans. Math. Softw. 2011, 38, 1–4. [Google Scholar] [CrossRef]
- Celik, S.; Korkmaz, M. Beta distribution and inferences about the beta functions. Asian J. Sci. Technol. 2016, 7, 2960–2970. [Google Scholar]
- Schreiber, J. Pomegranate: Fast and flexible probabilistic modelling in python. J. Mach. Learn. Res. 2018, 18, 1–6. [Google Scholar]
- Cui, S.; Datcu, M. Comparison of Kullback-Leibler divergence approximation methods between gaussian mixture models for satellite image retrieval. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3719–3722. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WCPE | Traditional SDB Model (IDA) | |
|---|---|---|
| Std difference | 2.74 m | Previous models and IDA poor results were discarded due to analysts’ excessive tampering |
| Mean difference | 0.36 m | |
| Median difference | 0.24 m | |
| Absolute difference | 2.07 m |
| WorldView + WCPE | Traditional SDB Model (IDA) | |
|---|---|---|
| Std difference | 1.83 m | 3.41 m |
| Mean difference | 0.84 | −3.22 m |
| Absolute difference | 1.45 m | 3.79 m |
| WCPE Composite SDB Model | Admiralty Charts | |
|---|---|---|
| Precision in the 0–5 m range | Better than 1 m | 1.1 m |
| Precision in the 5–15 m range | 1.3 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Louvart, P.; Cook, H.; Smithers, C.; Laporte, J. A New Approach to Satellite-Derived Bathymetry: An Exercise in Seabed 2030 Coastal Surveys. Remote Sens. 2022, 14, 4484. https://doi.org/10.3390/rs14184484
Louvart P, Cook H, Smithers C, Laporte J. A New Approach to Satellite-Derived Bathymetry: An Exercise in Seabed 2030 Coastal Surveys. Remote Sensing. 2022; 14(18):4484. https://doi.org/10.3390/rs14184484
Chicago/Turabian StyleLouvart, Pierre, Harry Cook, Chloe Smithers, and Jean Laporte. 2022. "A New Approach to Satellite-Derived Bathymetry: An Exercise in Seabed 2030 Coastal Surveys" Remote Sensing 14, no. 18: 4484. https://doi.org/10.3390/rs14184484
APA StyleLouvart, P., Cook, H., Smithers, C., & Laporte, J. (2022). A New Approach to Satellite-Derived Bathymetry: An Exercise in Seabed 2030 Coastal Surveys. Remote Sensing, 14(18), 4484. https://doi.org/10.3390/rs14184484