
An Efficient Method for Detection and Quantitation of Underwater Gas Leakage Based on a 300-kHz Multibeam Sonar


Abstract
:
1. Introduction
2. Theoretical Background
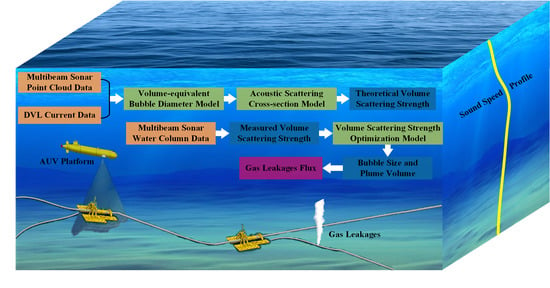
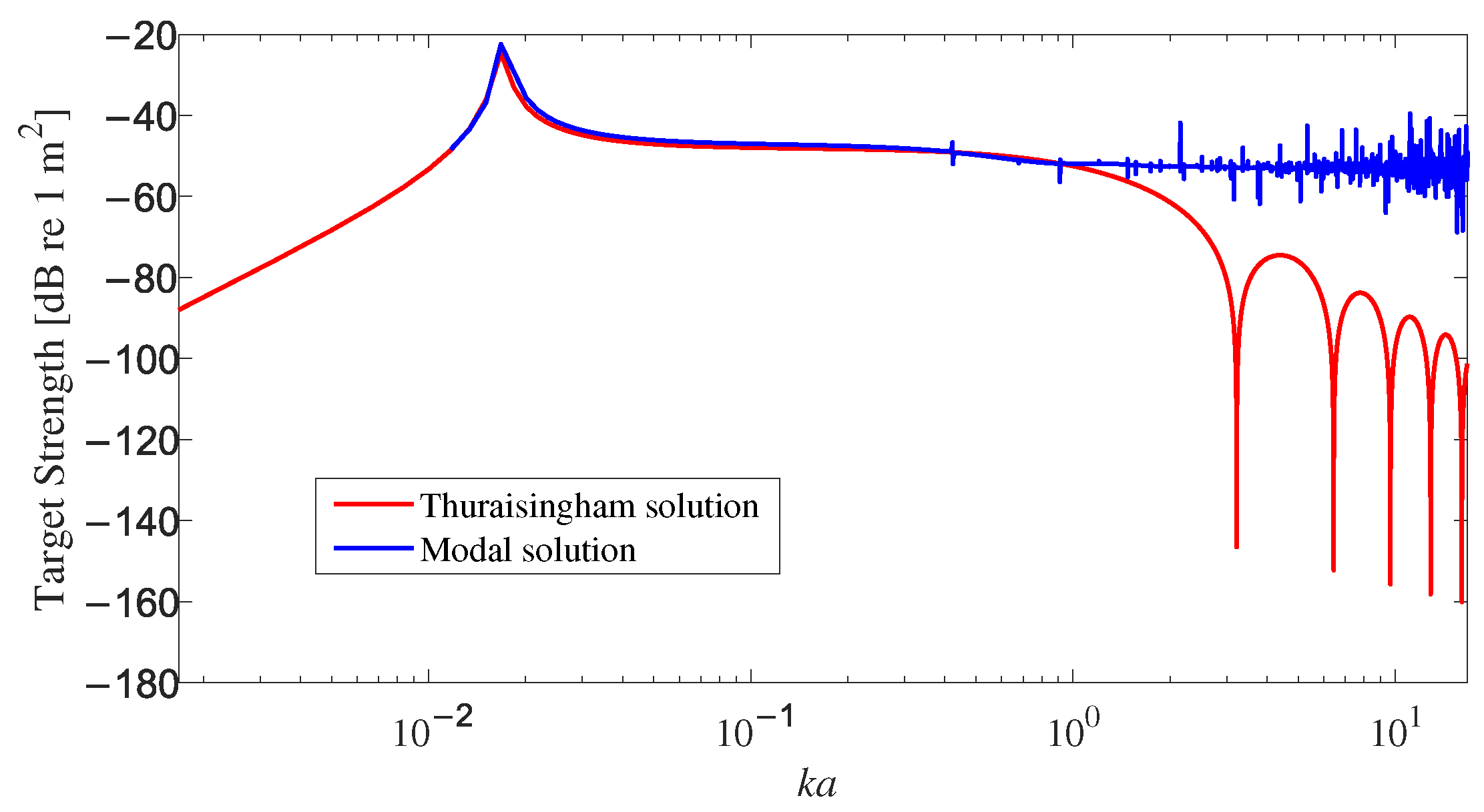
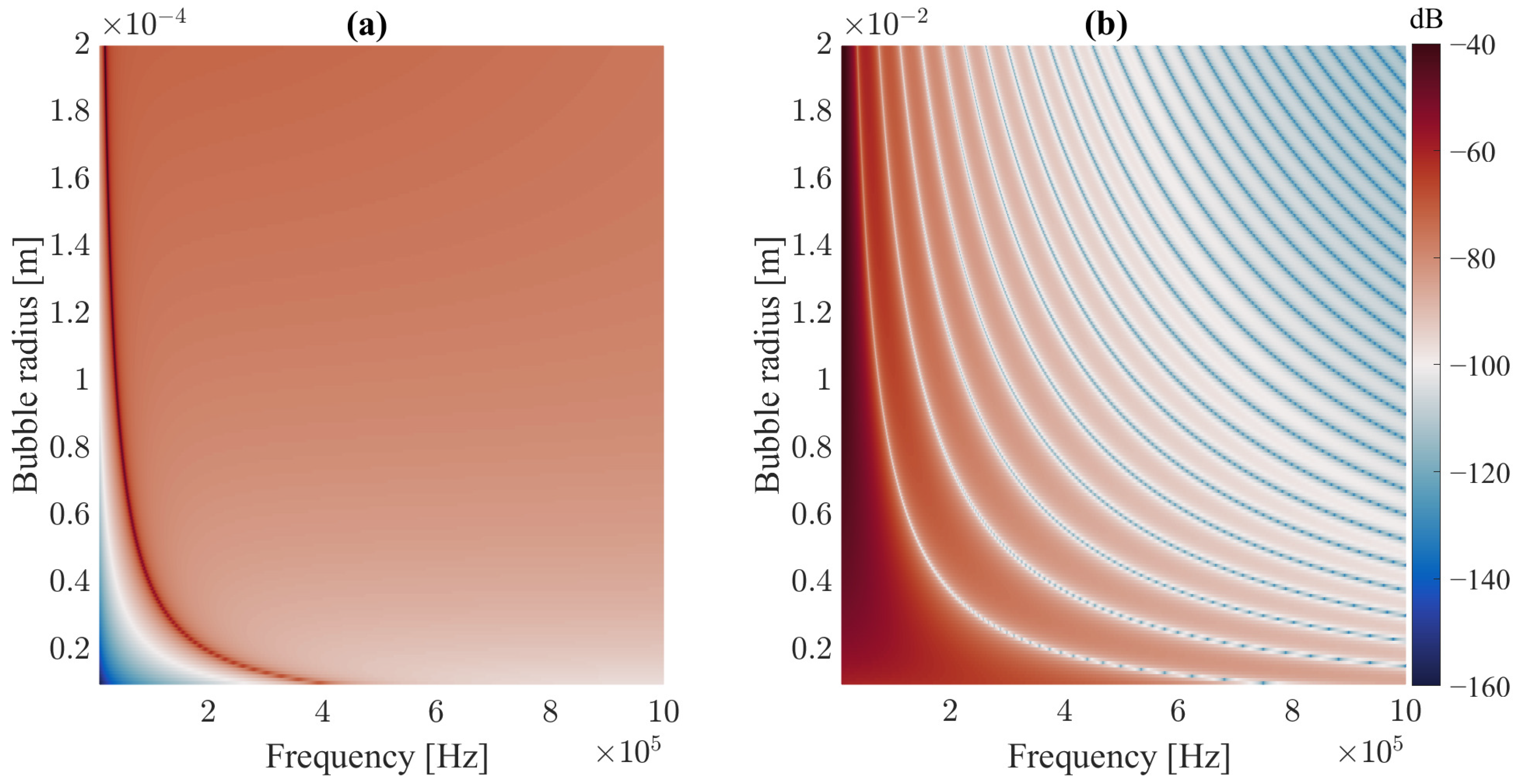
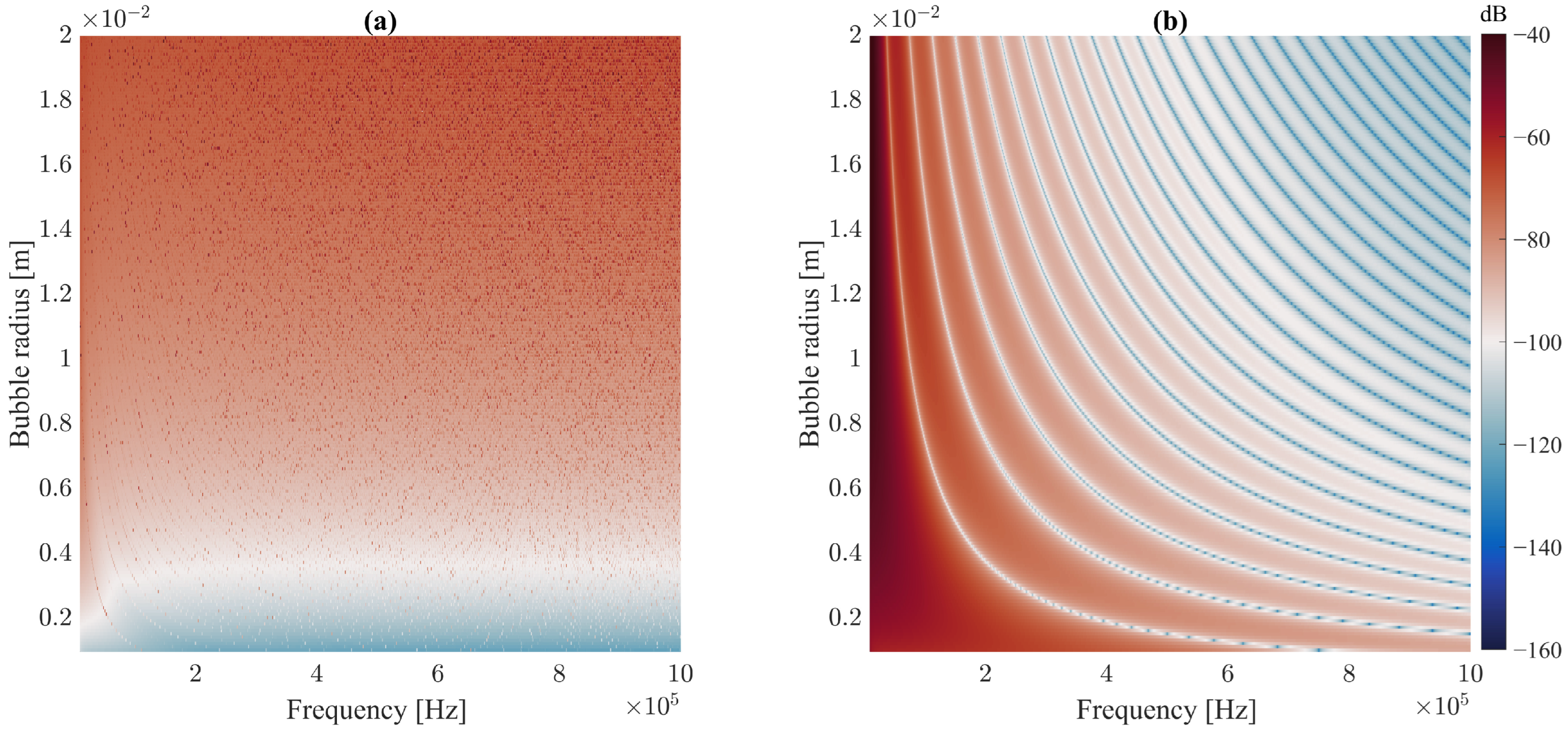
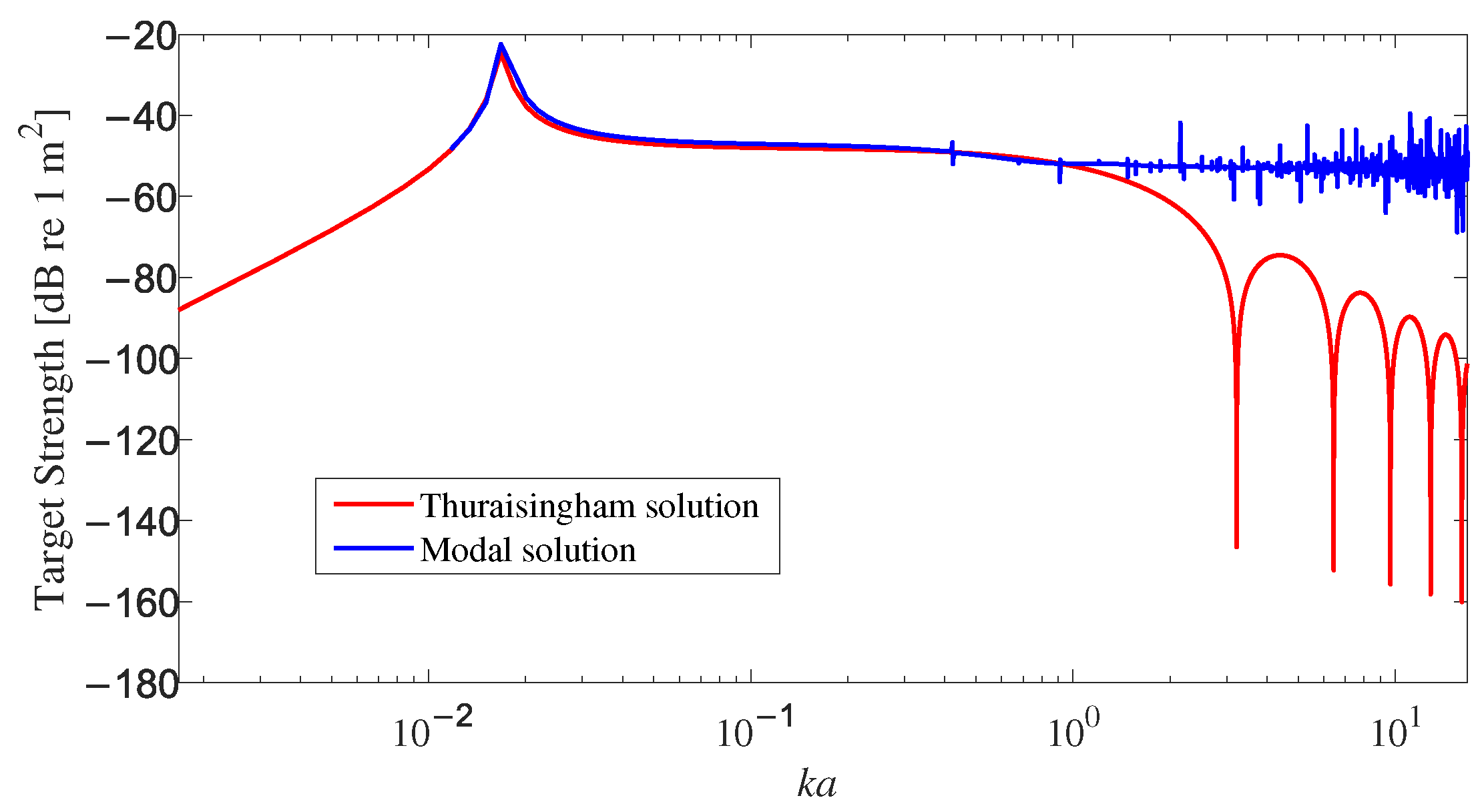
2.1. Volume-Scattering Model of Gas Leakage
- : Density ratio of a gas bubble and water () (dimensionless);
- : Sound speed ratio of a gas bubble and water () (dimensionless);
- : Wavenumber in a gas bubble () (m );
- : The spherical Bessel function of the first kind;
- : The spherical Hankel function of the first kind;
- : The derivative of the spherical Bessel function of the first kind;
- : The derivative of the spherical Hankel function of the first kind.
2.2. Bubble Size Distribution Estimation Model
2.3. Volume-Scattering Strength of a Gas Leakage Measured by Multibeam Sonar
3. Case Study
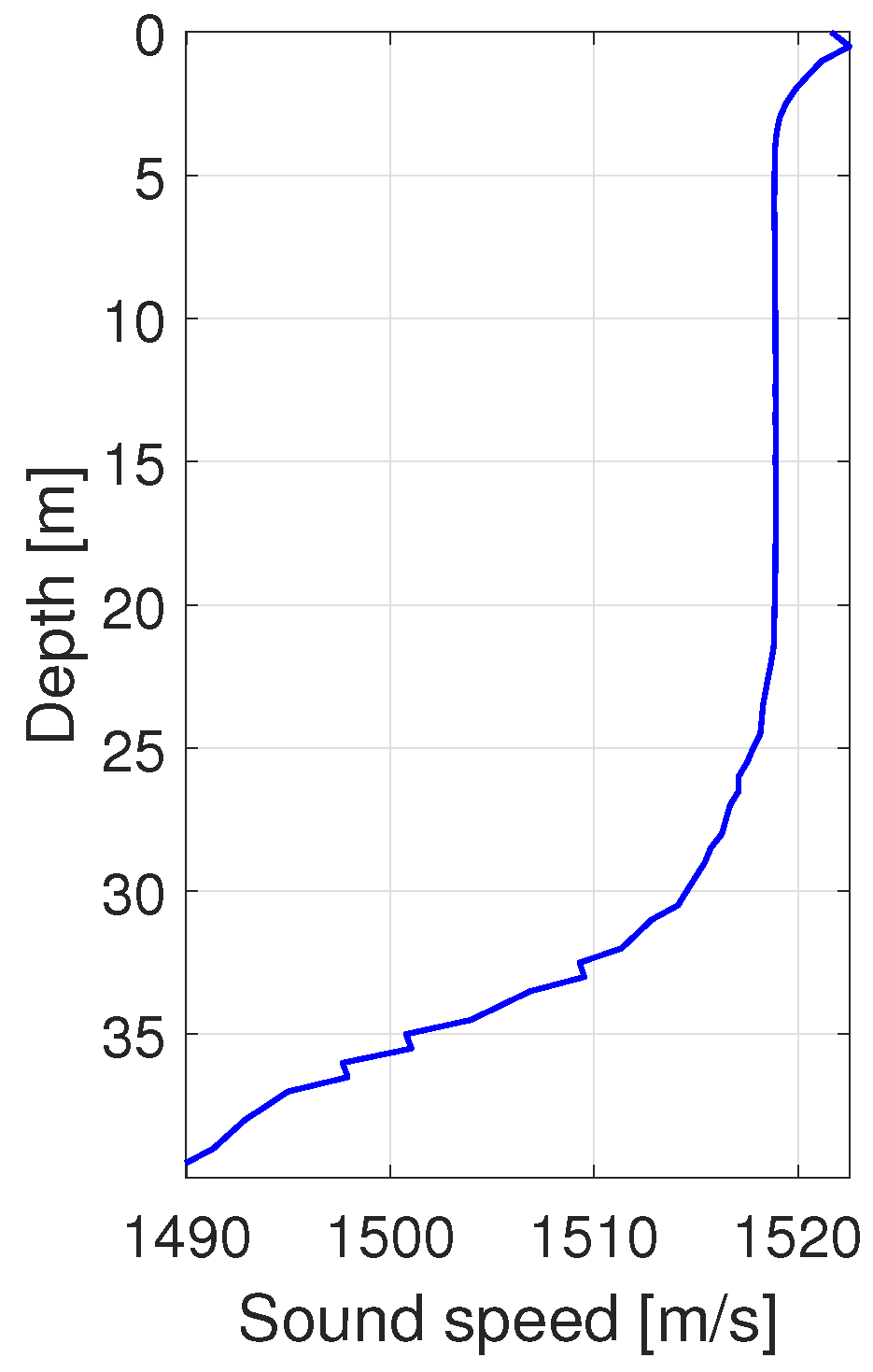
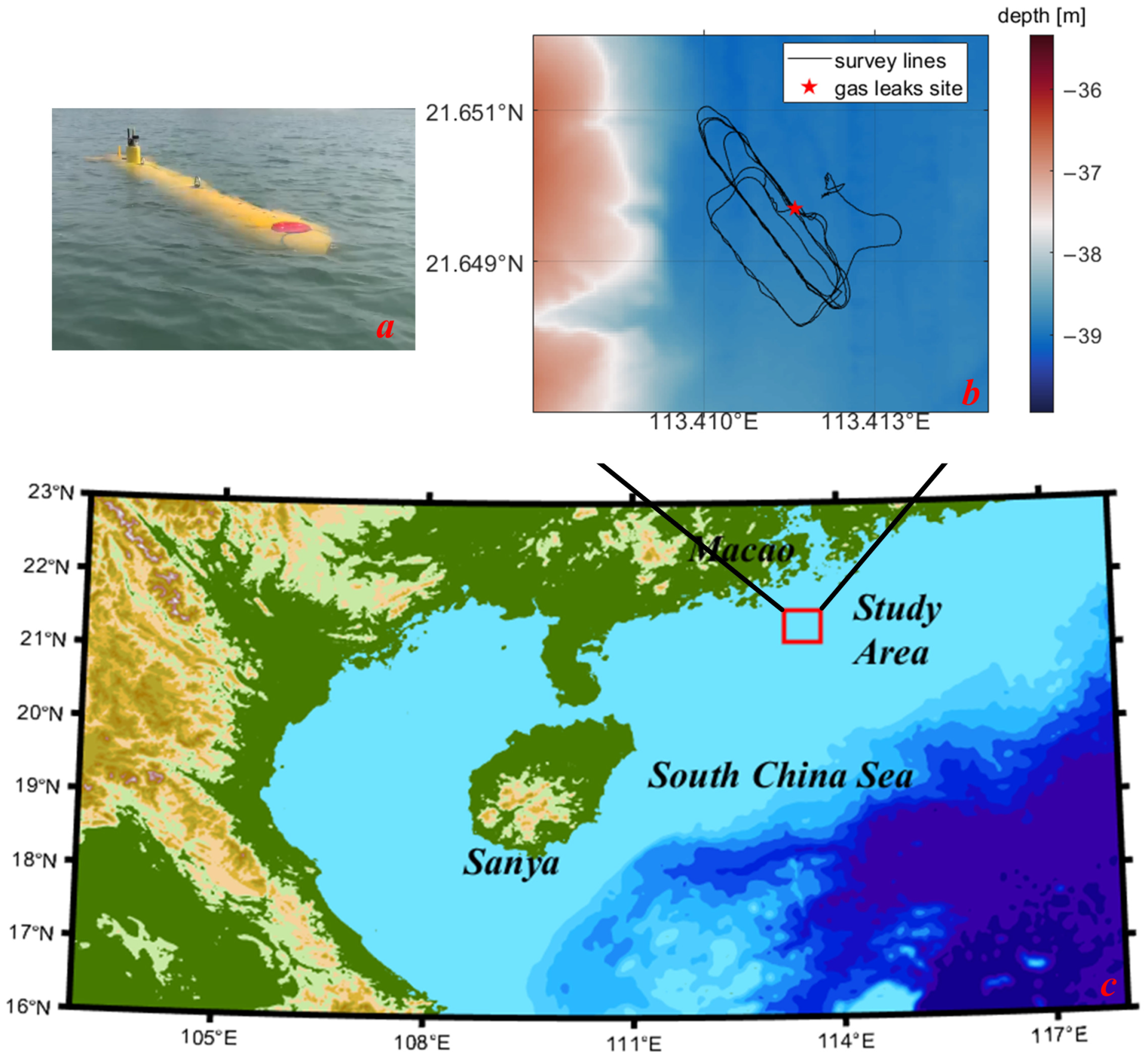
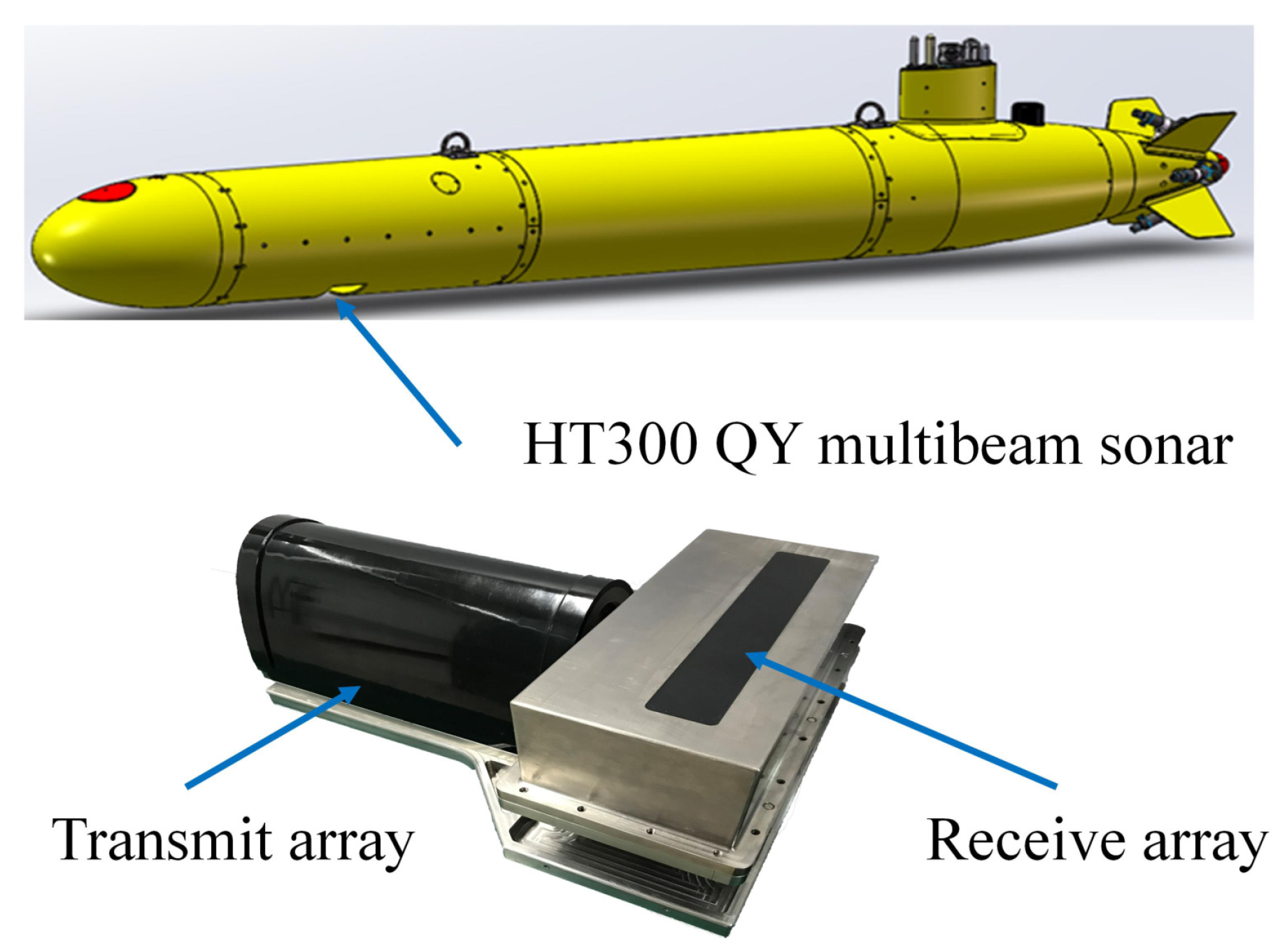
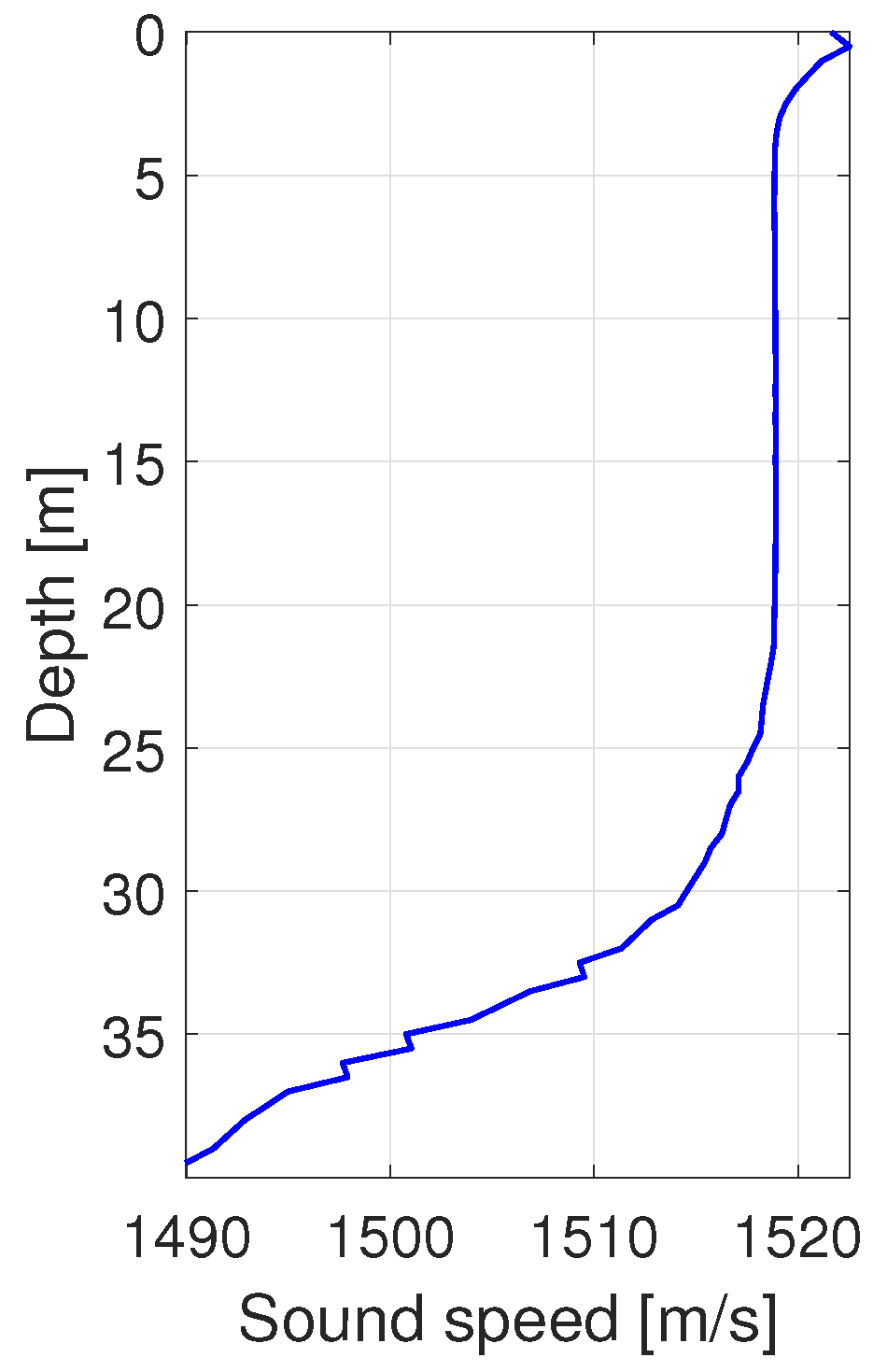
3.1. Field Study Area
3.2. Data Acquisition and Processing
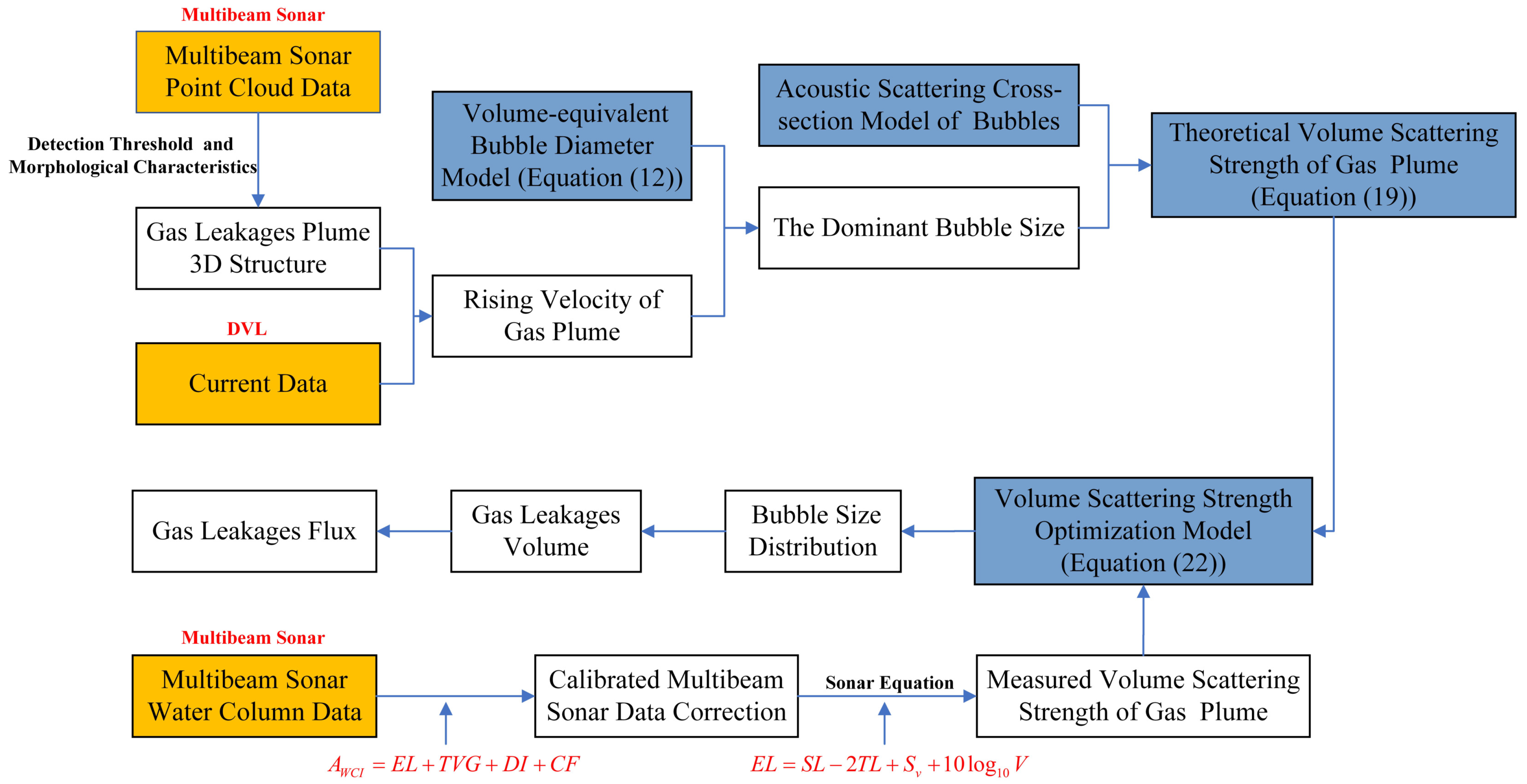
3.3. Gas Leakage Quantitation
4. Experimental Results and Discussion
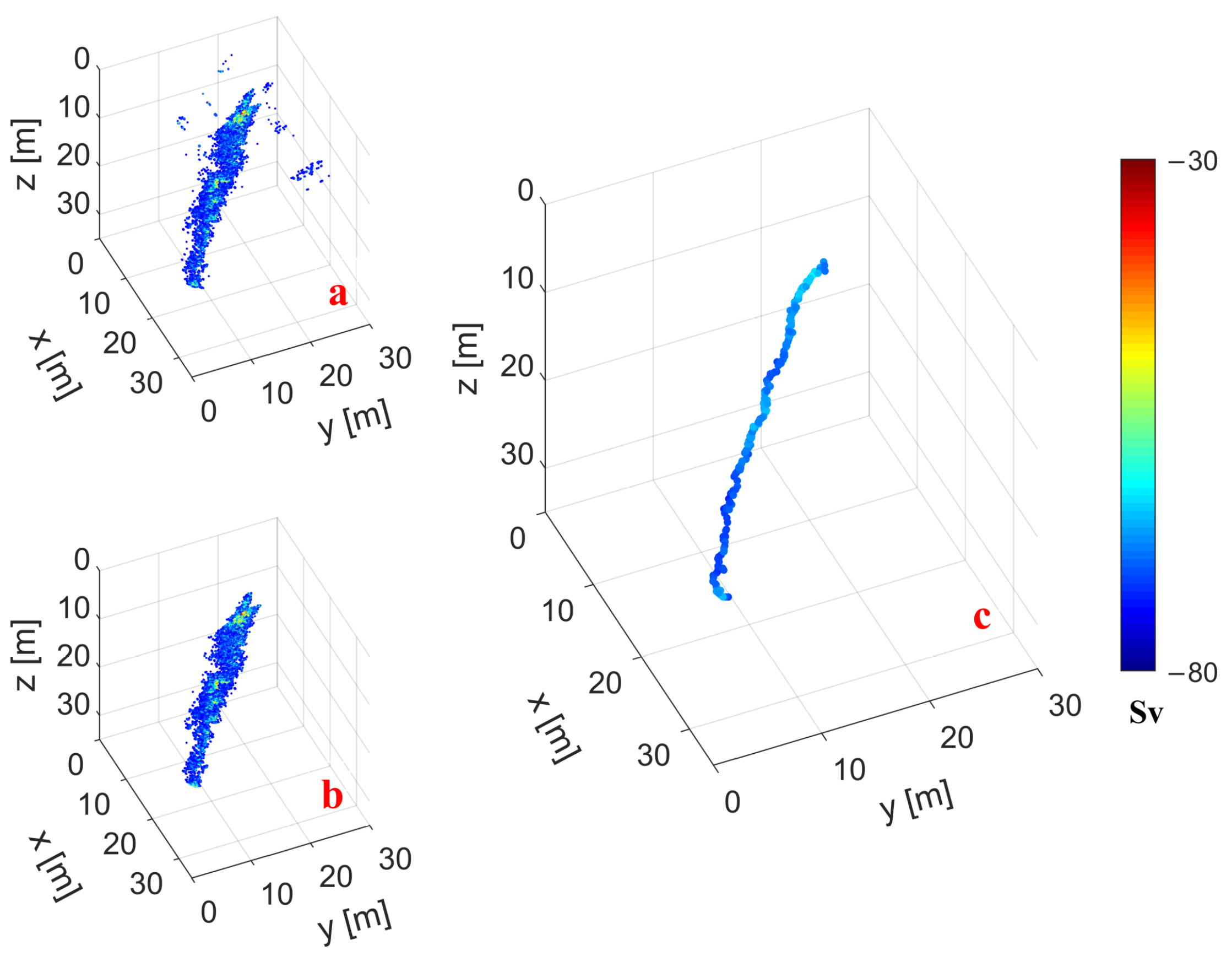
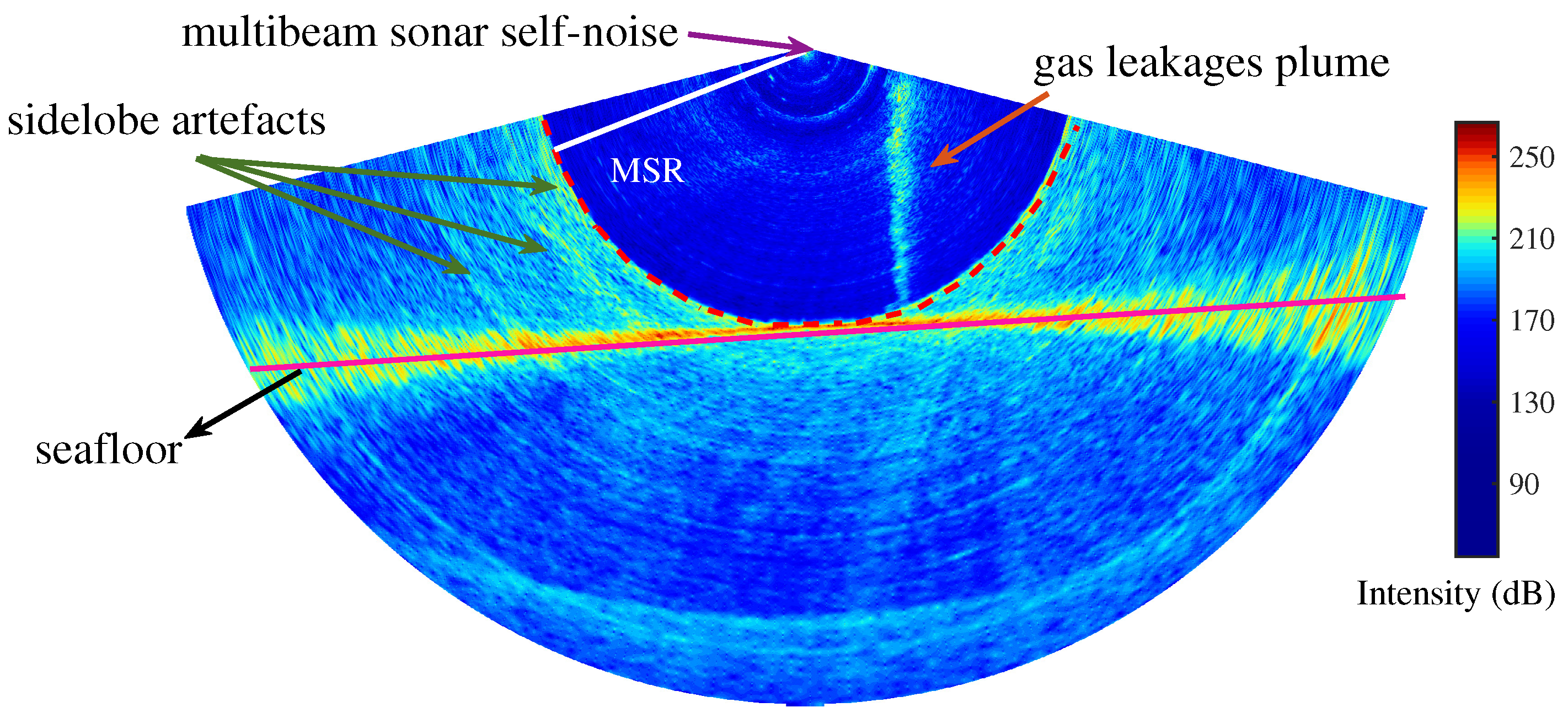
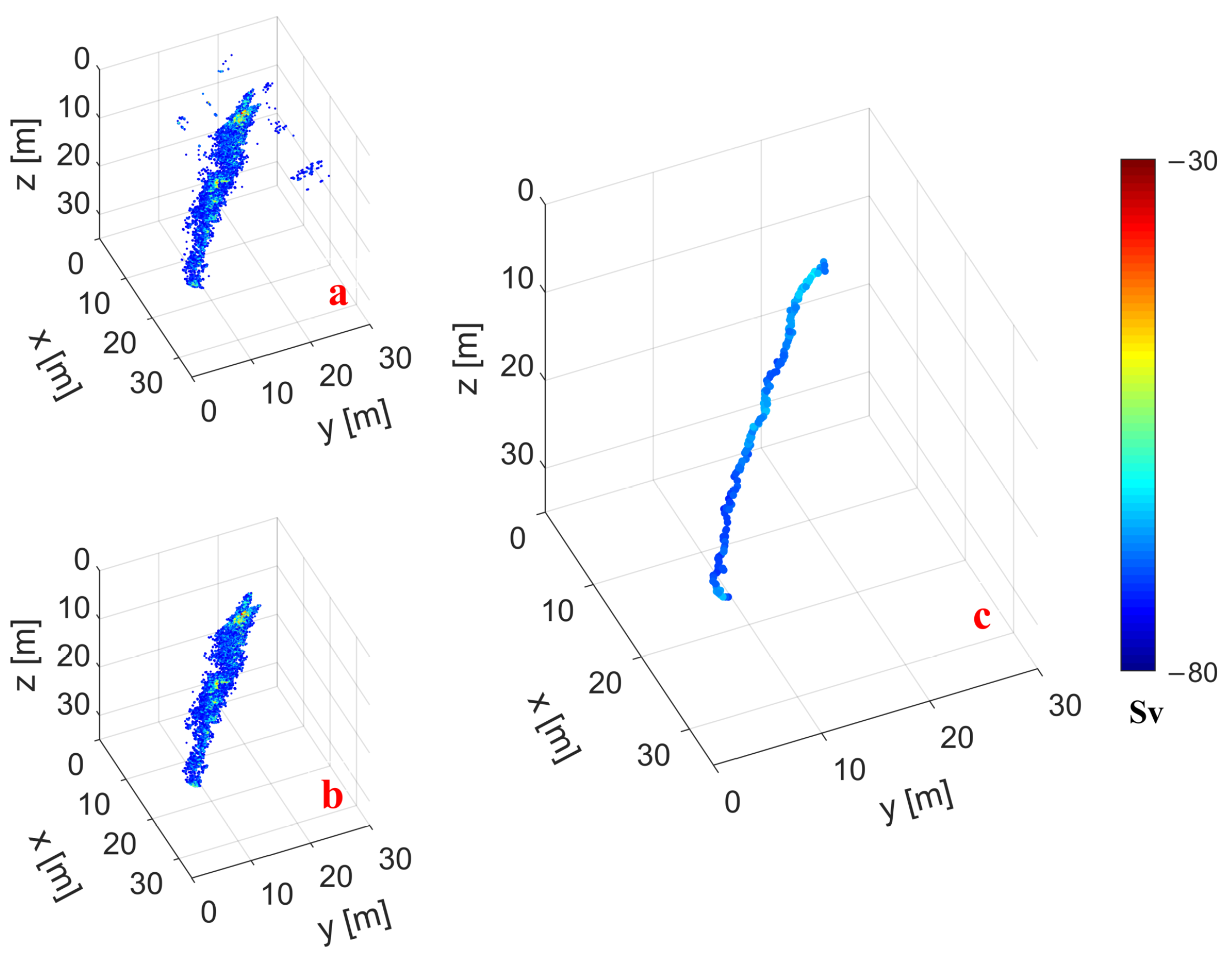
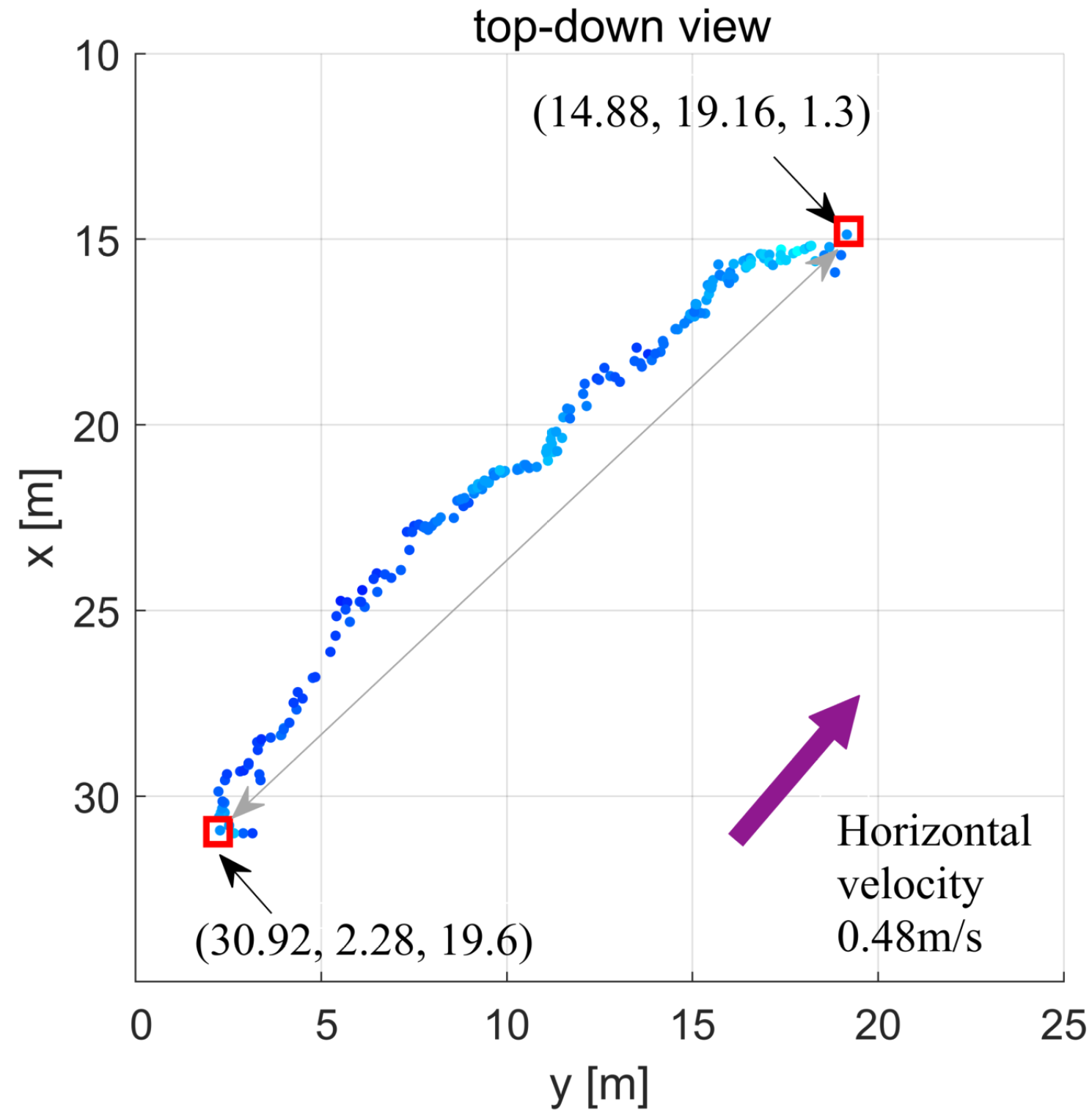
4.1. Gas Leakage Localization
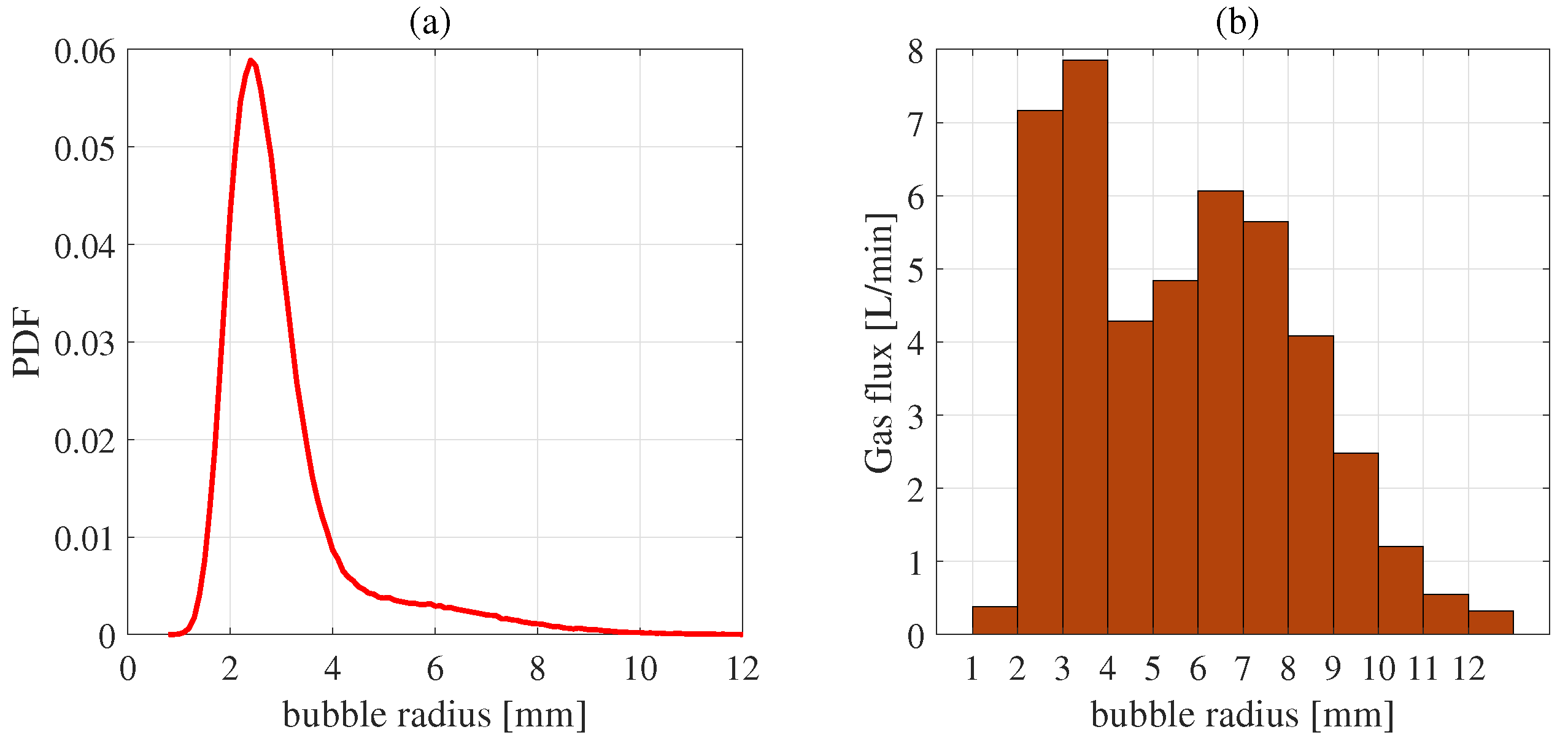
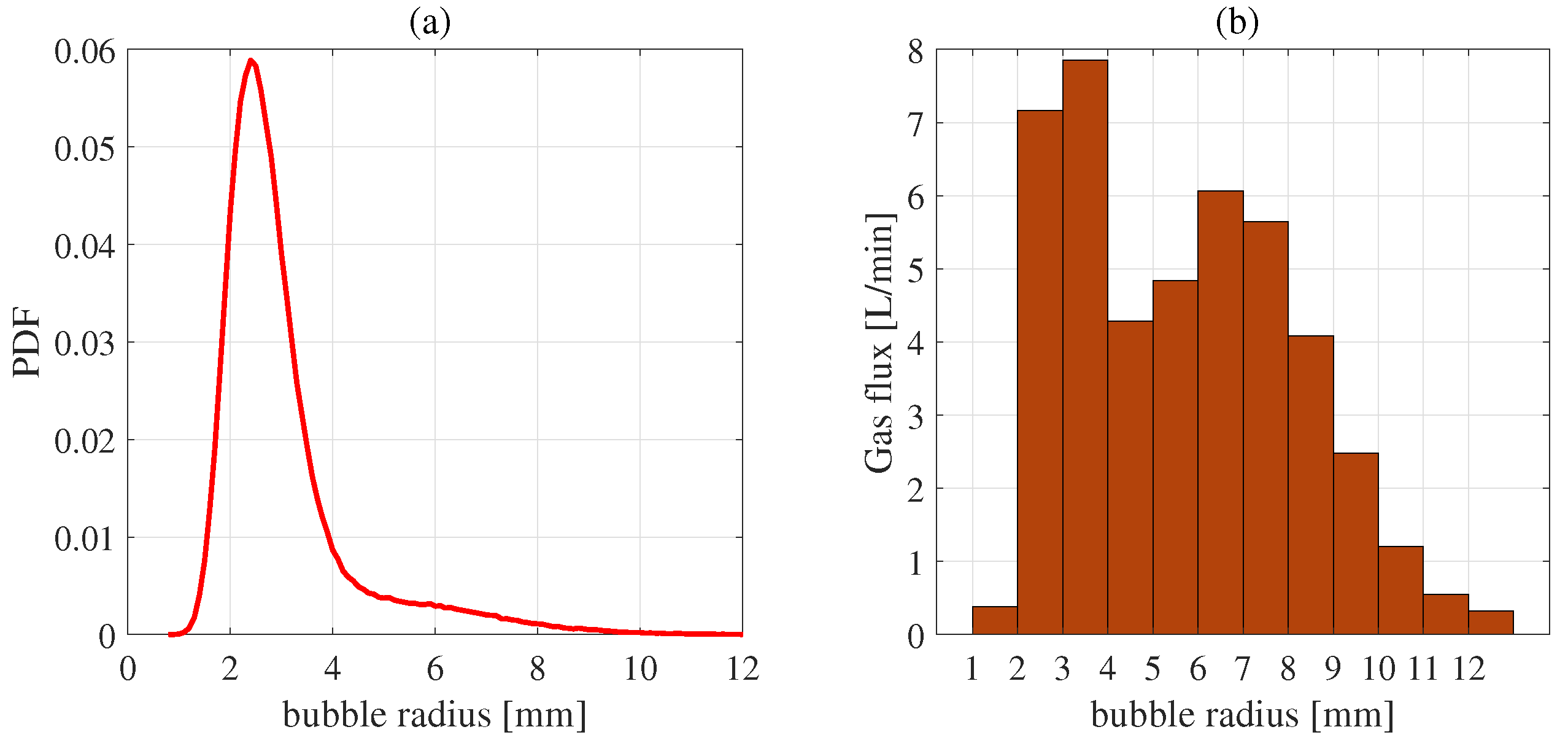
4.2. Bubble Size Distribution
4.3. Flow Rate Estimation
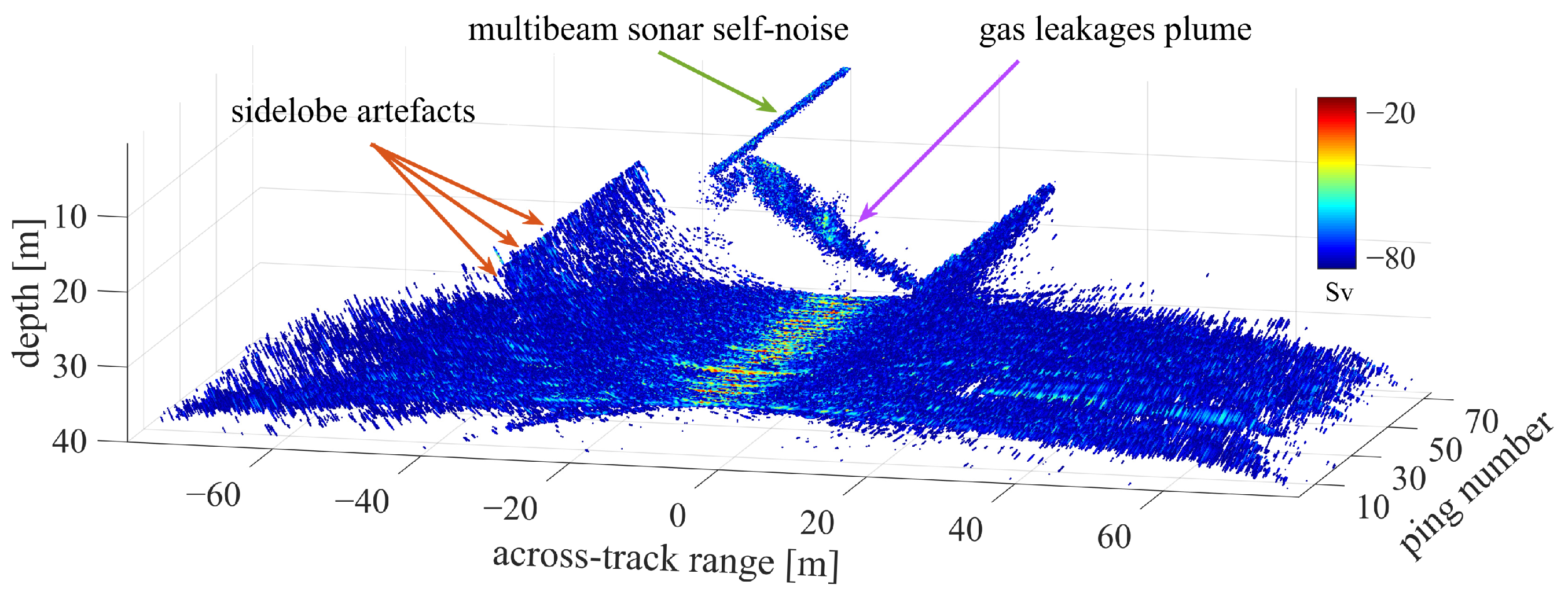
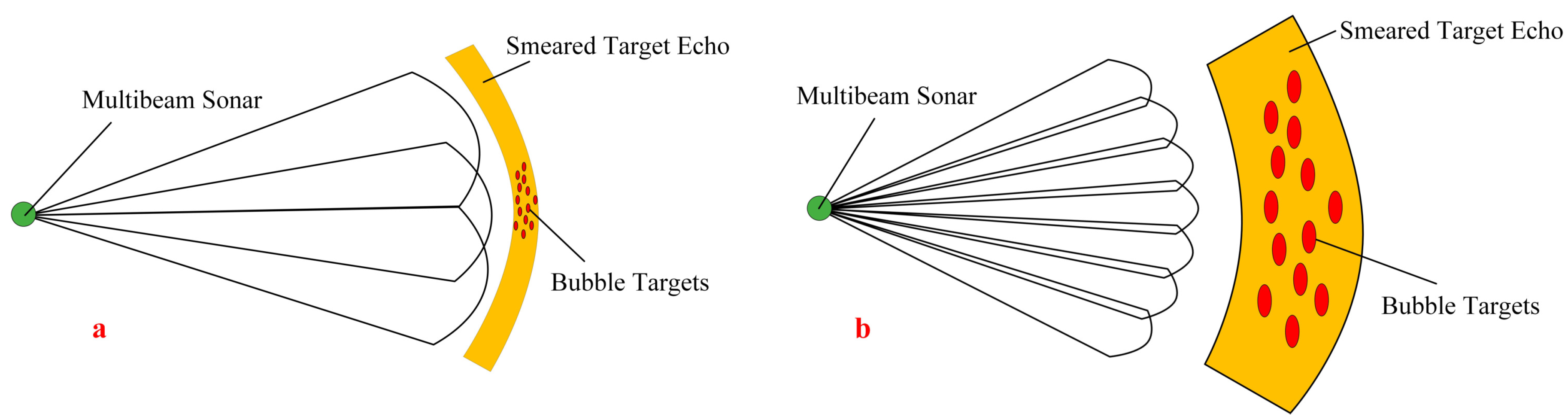
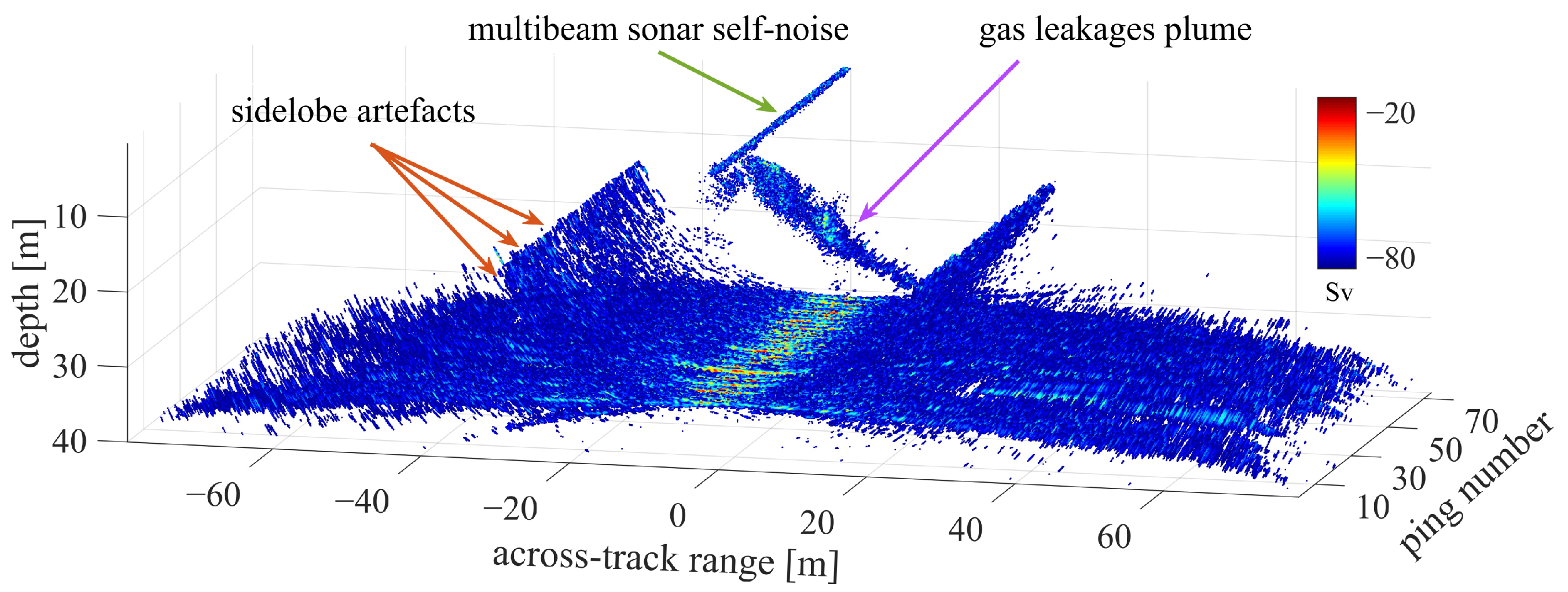
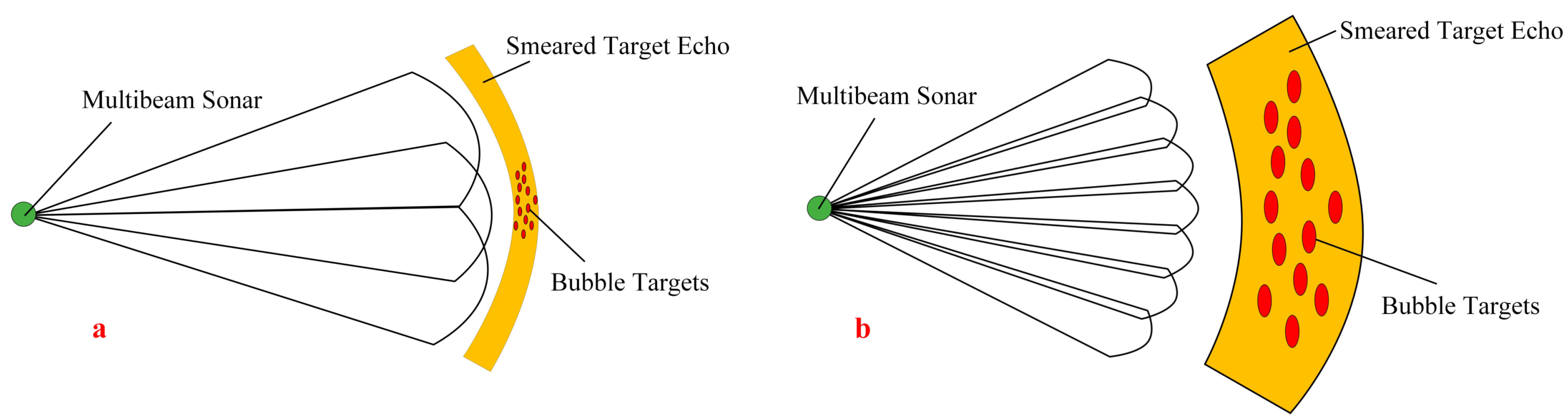
4.4. Seabed Sidelobe Effect and Smearing Effect in Multibeam Sonar
4.5. Proposed Method Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leighton, T.G.; White, P.R. Quantification of undersea gas leaks from carbon capture and storage facilities, from pipelines and from methane seeps, by their acoustic emissions. Proc. R. Soc. Math. Phys. Eng. Sci. 2012, 468, 485–510. [Google Scholar] [CrossRef]
- Veloso, M.; Greinert, J.; Mienert, J.; Batist, M.D. A new methodology for quantifying bubble flow rates in deep water using splitbeam echosounders: Examples from the Arctic offshore NW-Svalbard. Limnol. Oceanogr. Methods 2015, 13, 267–287. [Google Scholar] [CrossRef]
- Urban, P.; Kevin, K.; Greinert, J. Processing of multibeam water column image data for automated bubble/seep detection and repeated mapping. Limnol. Oceanogr. Methods 2017, 15, 1–21. [Google Scholar] [CrossRef]
- Li, J.; Roche, B.; Bull, J.M.; White, P.R.; Leighton, T.G.; Provenzano, G.; Dewar, M.; Henstock, T.J. Broadband acoustic inversion for gas flux quantification—Application to a methane plume at Scanner Pockmark, central North Sea. J. Geophys. Res. Oceans 2020, 125, e2020JC016360. [Google Scholar] [CrossRef]
- Zhao, J.; Mai, D.; Zhang, H.; Wang, S. Automatic Detection and Segmentation on Gas Plumes from Multibeam Water Column Images. Remote Sens. 2020, 12, 3085. [Google Scholar] [CrossRef]
- Xu, C.; Wu, M.; Zhou, T.; Li, J.; Du, W.; Zhang, W.; White, P.R. Optical Flow-Based Detection of Gas Leaks from Pipelines Using Multibeam Water Column Images. Remote Sens. 2020, 12, 119. [Google Scholar] [CrossRef]
- Minelli, A.; Tassetti, A.N.; Hutton, B.; Pezzuti Cozzolino, G.N.; Jarvis, T.; Fabi, G. Semi-Automated Data Processing and Semi-Supervised Machine Learning for the Detection and Classification of Water-Column Fish Schools and Gas Seeps with a Multibeam Echosounder. Sensors 2021, 21, 2999. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, T.; Du, W.; Shen, J.; Zhang, W. Smart Ocean: A New Fast Deconvolved Beamforming Algorithm for Multibeam Sonar. Sensors 2018, 18, 4013. [Google Scholar] [CrossRef]
- Nikolovska, A.; Sahling, H.; Bohrmann, G. Hydroacoustic methodology for detection, localization, and quantification of gas bubbles rising from the seafloor at gas seeps from the eastern Black Sea. Geochem. Geophys. Geosyst. 2008, 9, 1–13. [Google Scholar] [CrossRef]
- Prosperetti, A. Thermal effects and damping mechanisms in the forcedradial oscillations of gas bubbles in liquids. J. Acoust. Soc. Am. 1977, 61, 17–27. [Google Scholar] [CrossRef]
- Stanton, T.K. Simple approximate formulas for backscattering of sound by spherical and elongated objects. J. Acoust. Soc. Am. 1989, 86, 1499–1510. [Google Scholar] [CrossRef]
- Thuraisingham, R.A. New expressions of acoustic cross-sections of a single bubble in the monopole bubble theory. Ultrasonics 1997, 35, 407–409. [Google Scholar] [CrossRef]
- Medwin, H.; Clay, C.S. Fundamentals of Acoustical Oceanography; Academic Press: Cambridge, MA, USA, 1998; pp. 287–344. [Google Scholar]
- Ainslie, M.A.; Leighton, T.G. Review of scattering and extinction cross-sections, damping factors, and resonance frequencies of a spherical gas bubble. J. Acoust. Soc. Am. 2011, 130, 3184–3206. [Google Scholar] [CrossRef]
- Bergès, B.J.P.; Leighton, T.G.; White, P.R. Passive acoustic quantification of gas fluxes during controlled gas release experiments. Int. J. Greenh. Gas Control 2015, 38, 64–79. [Google Scholar] [CrossRef]
- Leblond, I.; Scalabrin, C.; Berger, L. Acoustic monitoring of gas emissions from the seafloor. Part I: Quantifying the volumetric flow of bubbles. Mar. Geophys. Res. 2014, 35, 191–210. [Google Scholar] [CrossRef]
- Padilla, A.M.; Weber, T.C. Acoustic backscattering observations from non-spherical gas bubbles with ka between 0.03 and 4.4. J. Acoust. Soc. Am. 2021, 149, 2504–2519. [Google Scholar] [CrossRef]
- Bergès, B.J.P. Acoustic Detection of Seabed Gas Leaks, with Application to Carbon Capture and Storage (CCS), and lEak Prevention Forthe Oil and Gas Industry. Ph.D. Dissertation, University of Southampton, Southampton, UK, 2015. [Google Scholar]
- Feuillade, C. Animations for visualizing and teaching acoustic impulse scattering from spheres. J. Acoust. Soc. Am. 2004, 115, 1893–1904. [Google Scholar] [CrossRef]
- Ryuzo, T.; Koji, I.; Tohru, M.; Yasushi, N. Measurement of Fish School Backscattering Strength Directivity Using Omnidirectional Scanning Sonar. J. Mar. Acoust. Soc. Jpn. 2016, 43, 145–160. [Google Scholar]
- Kim, H.; Kang, D.; Jung, S.W.; Kim, M. High-frequency acoustic backscattering characteristics for acoustic detection of the red tide species Akashiwo sanguinea and Alexandrium affine. J. Oceanol. Limnol. 2019, 37, 1268–1276. [Google Scholar] [CrossRef]
- Innangi, S.; Bonanno, A.; Tonielli, R.; Gerlotto, F.; Innangi, M.; Mazzola, S. High resolution 3-D shapes of fish schools: A new method to use the water column backscatter from hydrographic MultiBeam Echo Sounders. Appl. Acoust. 2016, 111, 148–160. [Google Scholar] [CrossRef]
- Weber, T.C.; Mayer, L.; Beaudoin, J.; Jerram, K.; Malik, M.; Shedd, B.; Rice, G. Mapping Gas Seeps with the Deepwater Multibeam Echosounder on Okecmos Explorer. Oceanography 2012, 25, 54–55, 62, 63. [Google Scholar]
- Colbo, K.; Ross, T.; Brown, C.; Weber, T. A review of oceanographic applications of water column data from multibeam echosounders. Estuar. Coast. Shelf Sci. 2014, 145, 41–56. [Google Scholar] [CrossRef]
- Dupré, S.; Berger, L.; Le Bouffant, N.; Scalabrin, C.; Bourillet, J.F. Fluid emissions at the Aquitaine Shelf (Bay of Biscay, France): A biogenic origin or the expression of hydrocarbon leakage? Cont. Shelf Res. 2014, 88, 24–33. [Google Scholar] [CrossRef]
- Schneider von Deimling, J.; Linke, P.; Schmidt, M.; Rehder, G. Ongoing methane discharge at well site 22/4b (North Sea) and discovery of a spiral vortex bubble plume motion. Mar. Pet. Geol. 2015, 68, 718–730. [Google Scholar] [CrossRef]
- Weber, T.C. A CFAR Detection Approach for Identifying Gas Bubble Seeps with Multibeam Echo Sounders. IEEE J. Ocean. Eng. 2021, 46, 1346–1355. [Google Scholar] [CrossRef]
- Ainslie, M.A.; Leighton, T.G. Near resonant bubble acoustic cross-section corrections, including examples from oceanography, volcanology, and biomedical ultrasound. J. Acoust. Soc. Am. 2009, 126, 2163–2175. [Google Scholar] [CrossRef]
- Anderson, V.C. Sound Scattering from a Fluid Sphere. J. Acoust. Soc. Am. 1950, 22, 426–431. [Google Scholar] [CrossRef]
- Greinert, J.; Artemov, Y.; Egorov, V.; Batist, M.D.; McGinnis, D. 1300-m-high rising bubbles from mud volcanoes at 2080 m in the Black Sea: Hydroacoustic characteristics and temporal variability. Earth Planet. Sci. Lett. 2006, 244, 1–15. [Google Scholar]
- Taylor, D.G. The Mechanics of Large Bubbles Rising through Extended Liquids and through Liquids in Tubes. Proc. R. Soc. Lond. 1950, 200, 375–390. [Google Scholar]
- Grace, J.R. Shapes and velocities of bubbles rising in infinite liquids. Trans. Inst. Chem. Eng. 1973, 51, 116–120. [Google Scholar]
- Bozzano, G.; Dente, M. Shape and terminal velocity of single bubble motion: A novel approach. Comput. Chem. Eng. 2001, 25, 571–576. [Google Scholar] [CrossRef]
- Park, S.H.; Park, C.; Lee, J.Y.; Lee, B. A Simple Parameterization for the Rising Velocity of Bubbles in a Liquid Pool. Nucl. Eng. Technol. 2017, 49, 692–699. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound, 3rd ed.; Peninsula Publishing: Newport Beach, CA, USA, 1983; pp. 17–28. [Google Scholar]
- Li, J.; White, P.R.; Bull, J.M.; Leighton, T.G. A noise impact assessment model for passive acoustic measurements of seabed gas fluxes. Ocean Eng. 2019, 183, 294–304. [Google Scholar] [CrossRef]
- Wilson, W.D. Equation for the Speed of Sound in Sea Water. J. Acoust. Soc. Am. 1960, 32, 1357. [Google Scholar] [CrossRef]
- Ren, Y.; Li, T.; Xu, J.; Hong, W.; Zheng, Y.; Fu, B. Overall Filtering Algorithm for Multiscale Noise Removal From Point Cloud Data. IEEE Access 2021, 9, 110723–110734. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 57, 276–280. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE. 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Speiser, J.M.; Bromley, K.; Miceli, W.J. Progress in eigenvector beamforming. Real-Time Signal Process. VIII 1986, 564, 2–8. [Google Scholar]
- Li, J.; White, P.R.; Bull, J.M.; Leighton, T.G.; Roche, B.; Davis, J.W. Passive acoustic localisation of undersea gas seeps using beamforming. Int. J. Greenh. Gas Control 2021, 108, 103316. [Google Scholar] [CrossRef]
- Baggeroer, B. Passive sonar limits upon nulling multiple moving ships with large aperture arrays. In Proceedings of the Conference Record of the Thirty-Third Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 24–27 October 1999; pp. 103–108. [Google Scholar]
- Hughes Clarke, J.E. Applications of multibeam water column imaging for hydrographic survey. Hydrogr. J. 2006, 120, 3–15. [Google Scholar]
- Diner, N. Correction on school geometry and density: Approach based on acoustic image simulation. Aquat. Living Resour. 2001, 14, 211–222. [Google Scholar] [CrossRef]
- Vatnehol, S.; Pena, H.; Ona, E. Estimating the volumes of fish schools from observations with multi-beam sonars. ICES J. Mar. Sci. 2017, 74, 813–821. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Integrated Navigation System | Positioning Accuracy |
|---|---|
| INU + GPS-Assisted | 5–15 m |
| INU + Difference GPS-Assisted | 0.5–3 m |
| INU + RTK Difference GPS-Assisted | 0.02–0.05 m |
| INU + DVL-Assisted | 0.2% of the sailing distance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Zhou, T.; Li, J.; Xu, C. An Efficient Method for Detection and Quantitation of Underwater Gas Leakage Based on a 300-kHz Multibeam Sonar. Remote Sens. 2022, 14, 4301. https://doi.org/10.3390/rs14174301
Zhang W, Zhou T, Li J, Xu C. An Efficient Method for Detection and Quantitation of Underwater Gas Leakage Based on a 300-kHz Multibeam Sonar. Remote Sensing. 2022; 14(17):4301. https://doi.org/10.3390/rs14174301
Chicago/Turabian StyleZhang, Wanyuan, Tian Zhou, Jianghui Li, and Chao Xu. 2022. "An Efficient Method for Detection and Quantitation of Underwater Gas Leakage Based on a 300-kHz Multibeam Sonar" Remote Sensing 14, no. 17: 4301. https://doi.org/10.3390/rs14174301
APA StyleZhang, W., Zhou, T., Li, J., & Xu, C. (2022). An Efficient Method for Detection and Quantitation of Underwater Gas Leakage Based on a 300-kHz Multibeam Sonar. Remote Sensing, 14(17), 4301. https://doi.org/10.3390/rs14174301