
Transmit Antenna Selection and Power Allocation for Joint Multi-Target Localization and Discrimination in MIMO Radar with Distributed Antennas under Deception Jamming


Abstract
:1. Introduction
- (1)
- The optimization model of joint multi-target localization and discrimination in the distributed MIMO radar is established. At first, a false target discriminator based on probability is constructed by using the CRLB of range deceptive parameter estimation. Then, combined with a nondimensionalization mechanism, localization accuracy and discrimination probability (DP) are de-dimensionalized and normalized to simplify the optimization problem. Finally, the optimization model of joint multi-target localization discrimination is established by introducing two task assignment parameters. In this case, the original multi-objective optimization problem is transformed into a single objective optimization problem, which reduces the difficulty of the solving process.
- (2)
- An effective three-step solving algorithm which combines the relaxation technique and the sorting algorithm is proposed for solving the optimization model. Since the formulated optimization model is non-convex and non-smooth, it is hard to find a global solution. The proposed solving algorithm relaxes the original problem by taking the product of transmit antenna selection variable and the corresponding power allocation result as an auxiliary variable. Furthermore, by adopting the sorting algorithm and the particle swarm optimization (PSO) algorithm, we obtain the final resource allocation results.
- (3)
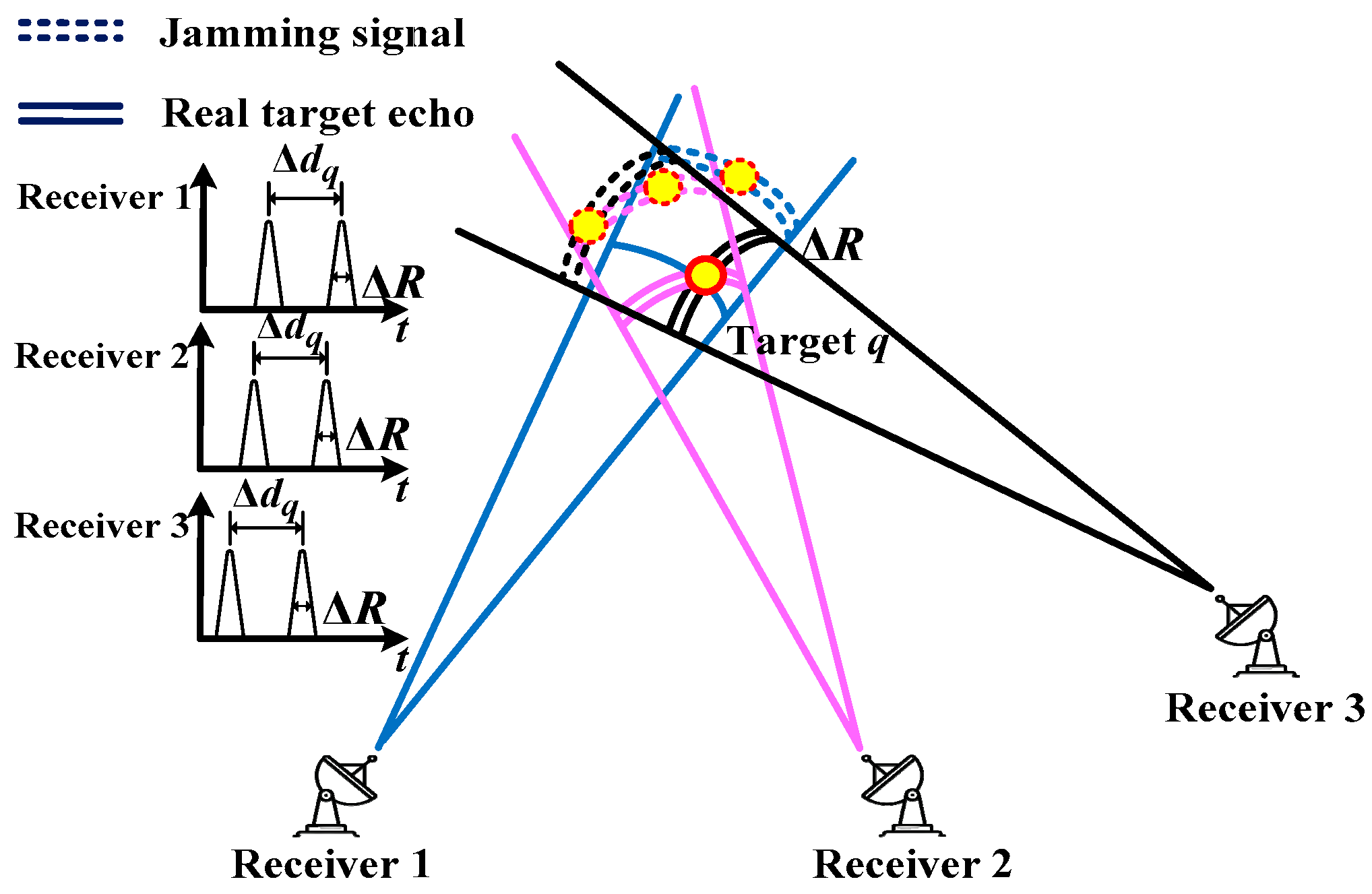
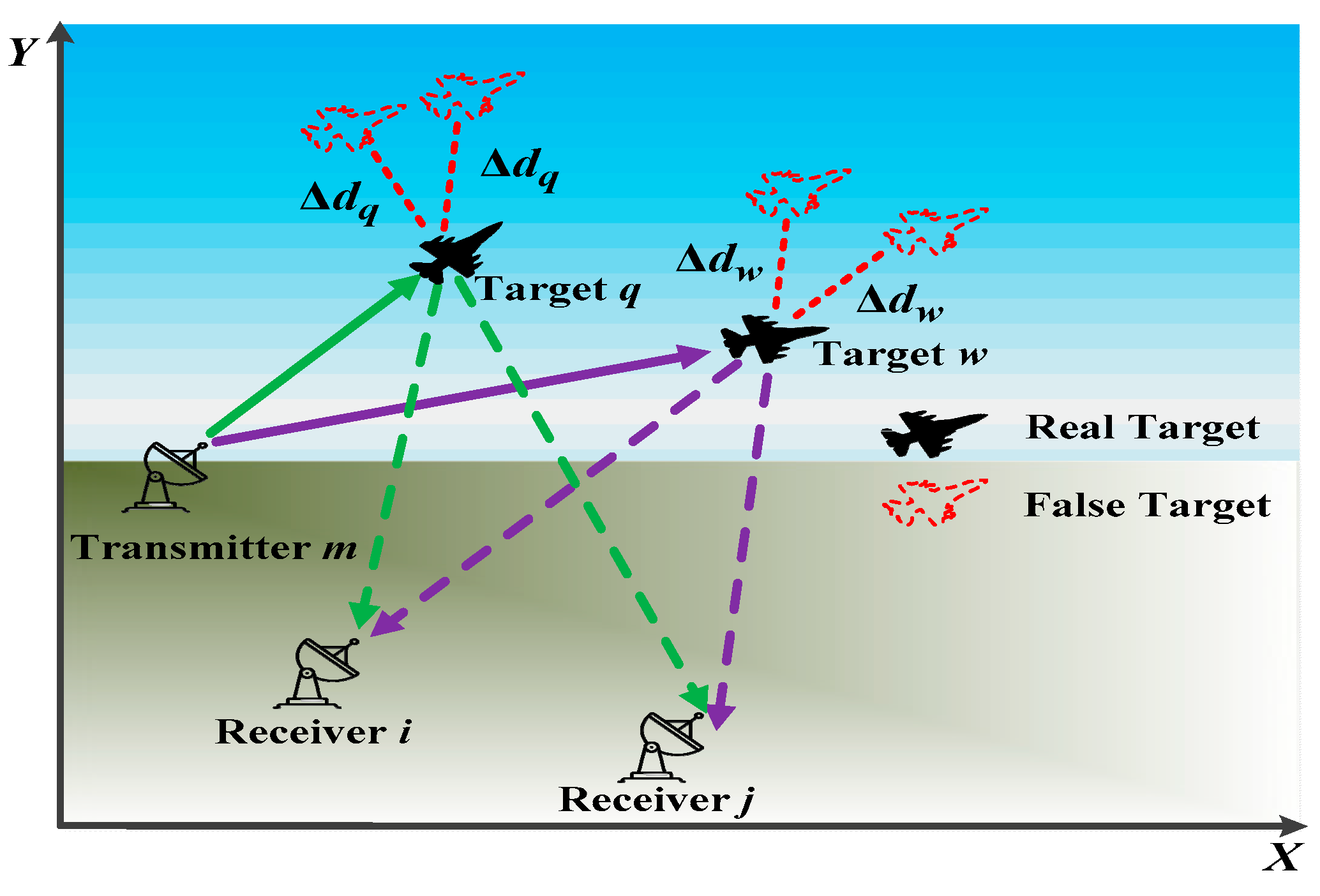
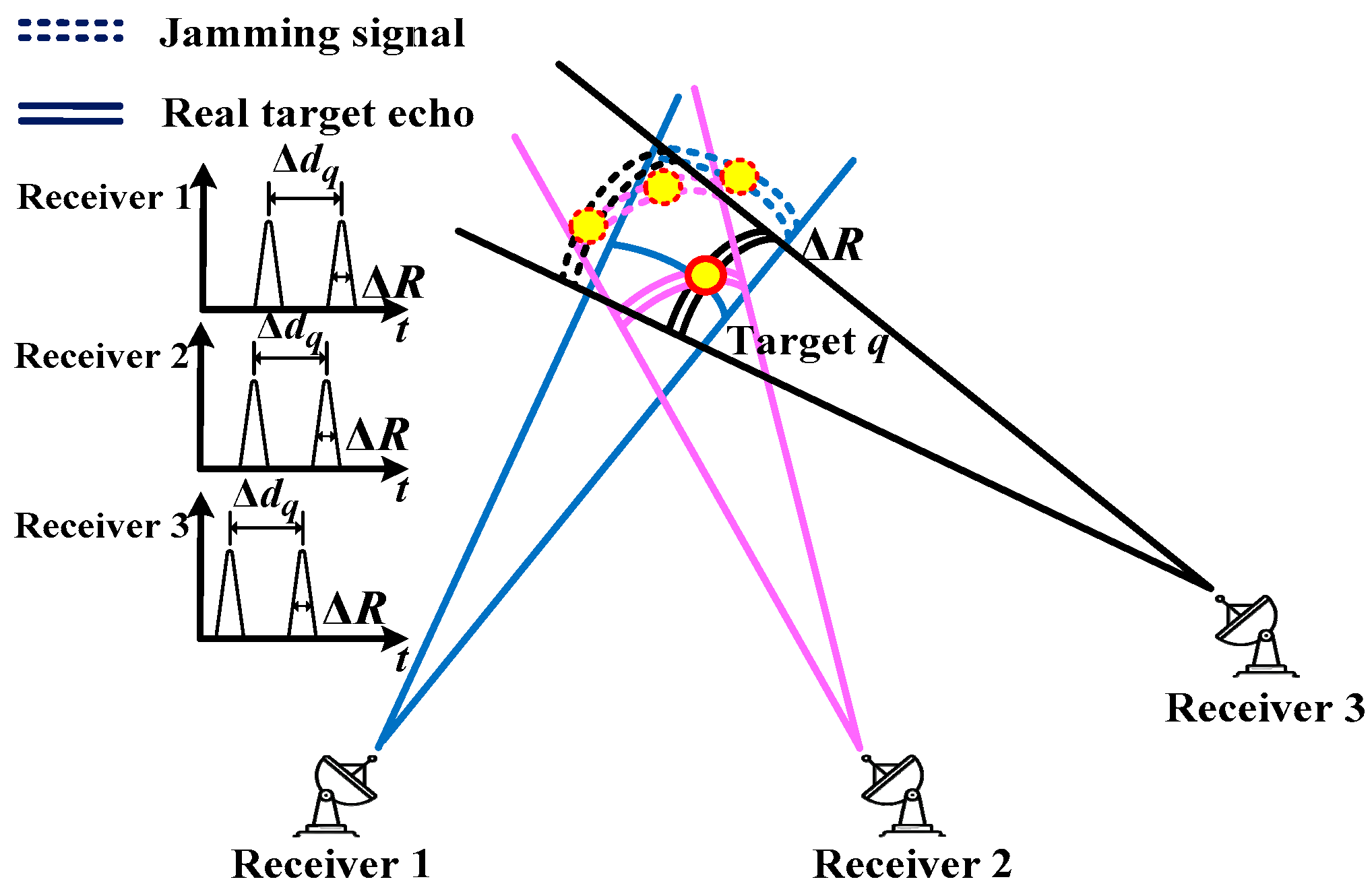
- A unified resource allocation mechanism in the distributed MIMO radar under deception jamming is developed. Considering the range deception jamming environment in the mission region, we establish the system model under deception jamming and derive the CRLB for range deceptive jamming parameter estimation. In this case, an effective technique for solving radar resource management under deception jamming environment is formulated.
2. Data Processing Mechanism
2.1. Signal Model
2.2. Parameter Estimation
3. Derivation of Estimation Performance Metric
4. Optimization Model and Solution Strategy
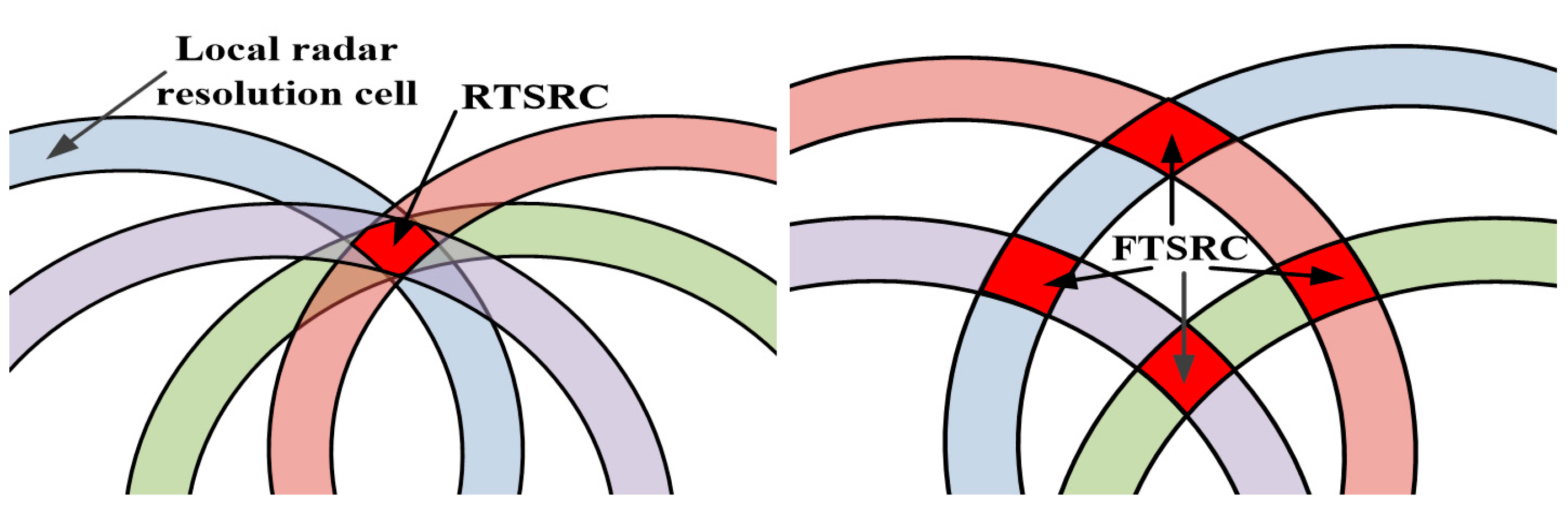
4.1. False Target Discriminator
4.2. Problem Formulation
4.3. Solution Strategy
| Algorithm 1. Sorting algorithm for the transmit antenna selection. |
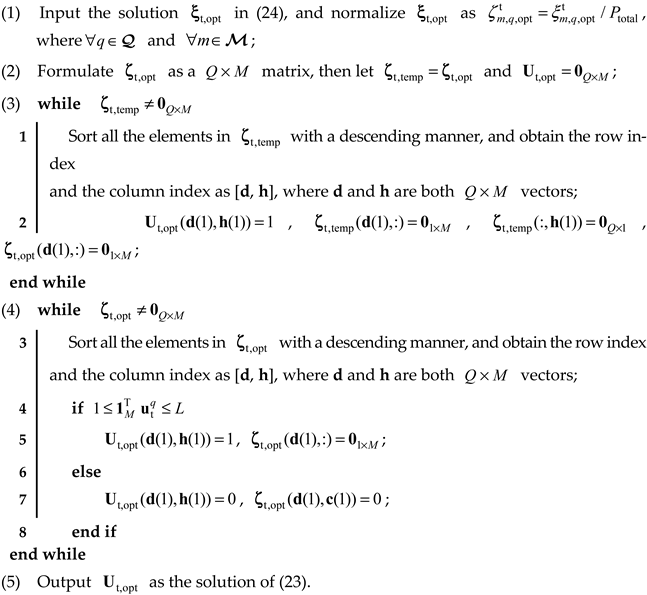 |
5. Experiments and Results
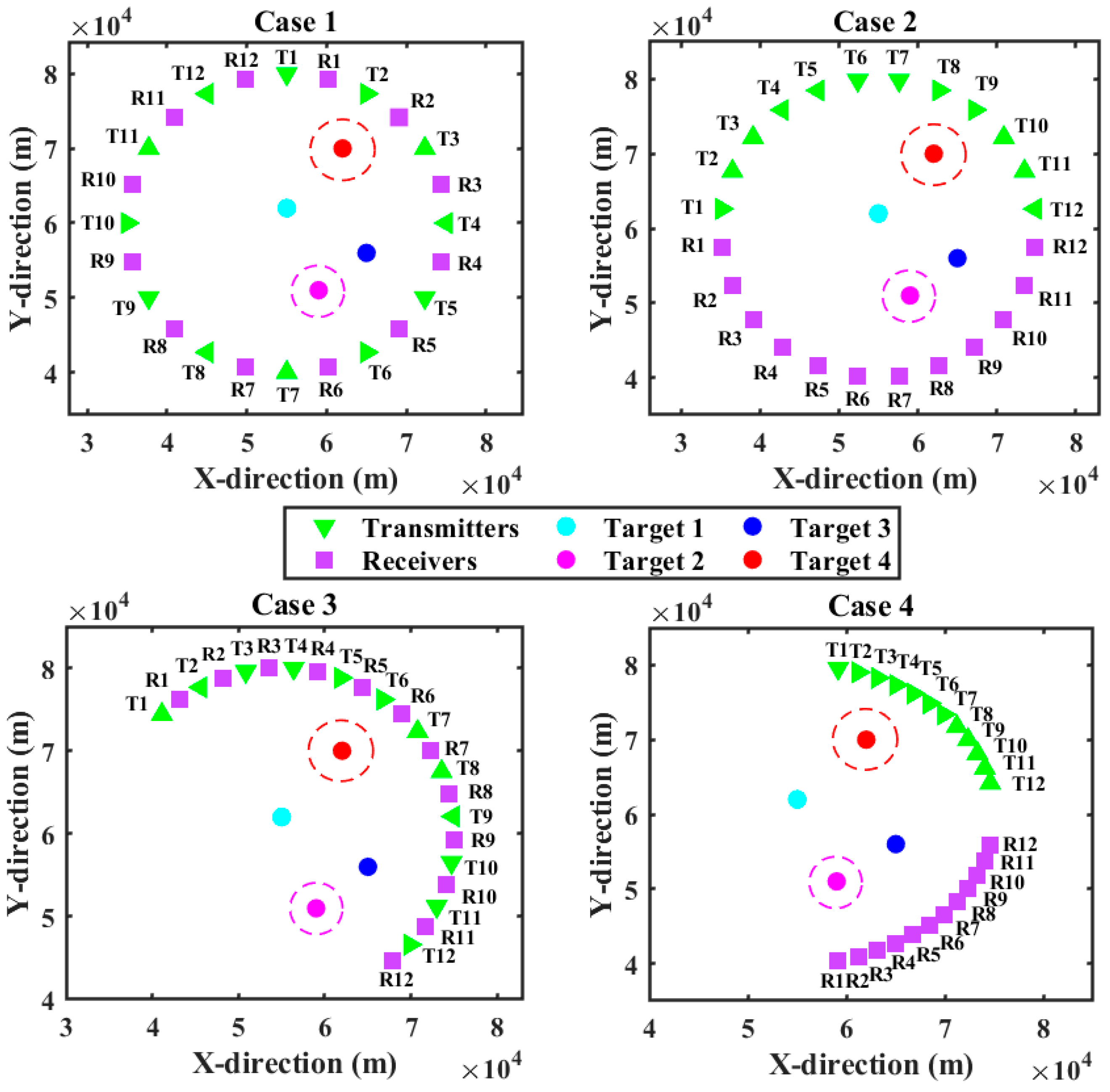
5.1. Parameter Designation
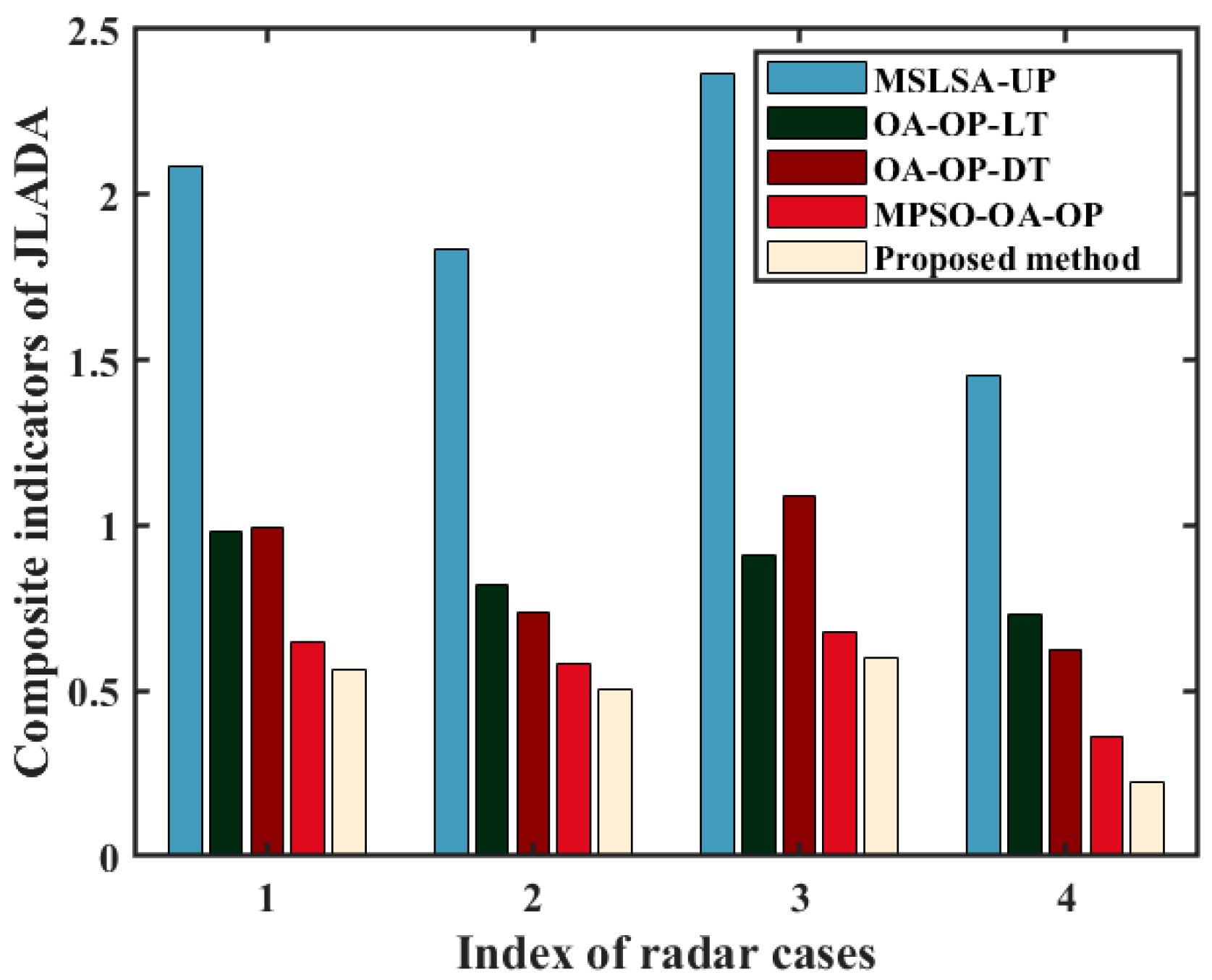
5.2. Effectiveness of the Proposed Solver
- (1)
- Multi-start local search [25] antenna selection with uniform power allocation (MSLSA-UP). This algorithm selects active transmit antennas by adopting the multi-start local search algorithm and allocates the transmit power resource to those selected active transmit antennas uniformly.
- (2)
- Optimal antenna selection with optimal power allocation for localization task (OA-OP-LT). In this algorithm, we consider the localization task, and the task assignment parameters in (22) are set as and , for . Then, the proposed solving strategy is utilized to solve the modified optimization model, and the optimal transmit antenna selection and power allocation results can be obtained.
- (3)
- Optimal antenna selection with optimal power allocation for discrimination task (OA-OP-DT). This algorithm focuses exclusively on discrimination task, and we set and , for . Similar with the OA-OP-LT algorithm, the optimization model is then solved by the proposed solving strategy.
- (4)
- Modified PSO (MPSO) [26] based optimal antenna selection with optimal power allocation (MPSO-OA-OP). By Combining the MPSO algorithm and the optimization model in (22), this algorithm solves the transmit antenna selection problem and the power allocation problem simultaneously.
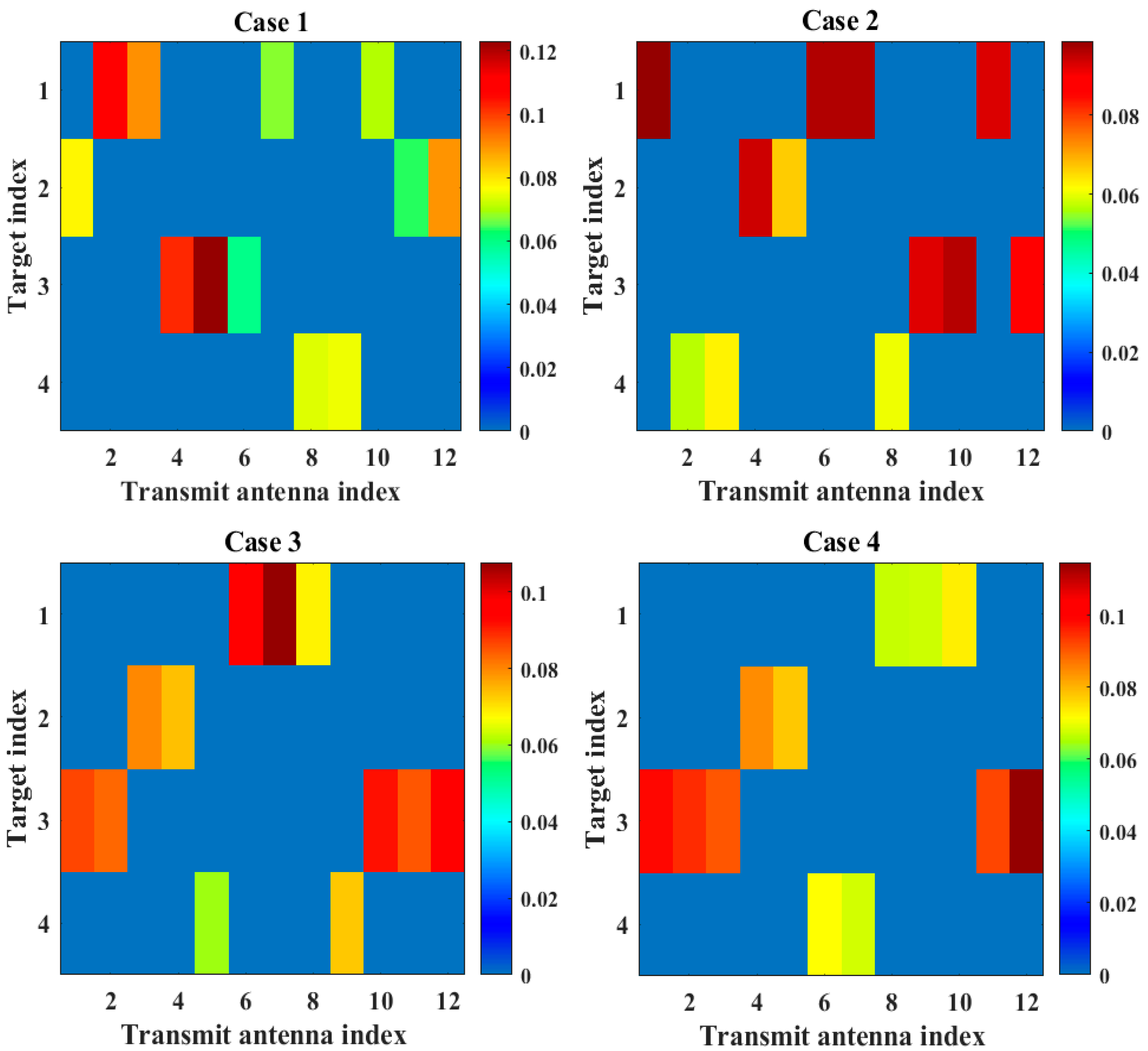
5.3. Validity Analysis of the Proposed Model
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yan, J.K.; Pu, W.Q.; Zhou, S.H.; Liu, H.W.; Bao, Z. Collaborative detection and power allocation framework for target tracking in multiple radar system. Inf. Fusion. 2020, 55, 173–183. [Google Scholar] [CrossRef]
- Rabideau, D.J.; Parker, P. Ubiquitous MIMO Multifunction Digital Array Radar and the Role of Time-Energy Management in Radar; MIT Lincoln Laboratory: Lexington, MA, USA, 2003. [Google Scholar]
- Xie, M.C.; Yi, W.; Kong, L.J.; Kirubarajan, T. Receive-beam resource allocation for multiple target tracking with distributed MIMO Radars. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2421–2436. [Google Scholar] [CrossRef]
- Zheng, G.M.; Song, Y.W.; Chen, C. Height measurement with meter wave polarimetric MIMO radar: Signal model and music-like algorithm. Signal Process. 2022, 190, 108344. [Google Scholar] [CrossRef]
- Zhang, W.W.; Shi, C.G.; Salous, S.; Zhou, J.J.; Yan, J.K. Convex optimization-based power allocation strategies for target localization in distributed Hybrid non-coherent active-passive radar networks. IEEE Trans. Signal Process. 2022, 70, 2476–2488. [Google Scholar] [CrossRef]
- Zhang, H.W.; Liu, W.J.; Xue, J.W.; Zhang, Z.J.; Lu, W.L. Joint subarray selection and power allocation for cognitive target tracking in large-scale MIMO radar networks. IEEE Syst. J. 2020, 14, 2569–2580. [Google Scholar] [CrossRef]
- Radmard, M.; Chitgarha, M.M.; Majd, M.N.; Nayebi, M.M. Antenna placement and power allocation optimization in MIMO detection. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1468–1478. [Google Scholar] [CrossRef]
- Gao, H.; Wang, J.; Jiang, C.X.; Zhang, X.D. Antenna allocation in MIMO radar with widely separated antennas for multi-target detection. Sensors 2014, 14, 20165–20187. [Google Scholar] [CrossRef] [PubMed]
- Godrich, H.; Petropulu, A.P.; Poor, H.V. Power allocation strategies for target localization in distributed multiple-radar architectures. IEEE Trans. Signal Process. 2011, 59, 3226–3240. [Google Scholar] [CrossRef]
- Garcia, N.; Haimovich, A.M.; Coulon, M.; Lopts, M. Resource allocation in MIMO radar with multiple targets for non-coherent localization. IEEE Trans. Signal Process. 2014, 62, 2656–2666. [Google Scholar] [CrossRef]
- Zhang, W.W.; Shi, C.G.; Zhou, J.J. Power minimization-based joint resource allocation algorithm for target localization in non-coherent distributed MIMO radar system. IEEE Syst. J. 2022, 16, 2183–2194. [Google Scholar] [CrossRef]
- Xie, M.C.; Yi, W.; Kirubarajan, T.; Kong, L.J. Joint node selection and power allocation strategy for multitarget tracking in decentralized radar networks. IEEE Trans. Signal Process. 2018, 66, 729–743. [Google Scholar] [CrossRef]
- Chen, Y.J.; Zhang, Q.; Luo, Y.; Li, K.M. Multi-target radar imaging based on phased-MIMO technique-Part P: Adaptive resource allocation. IEEE Sens. J. 2017, 17, 6198–6209. [Google Scholar] [CrossRef]
- Zhao, S.S.; Liu, Z.W. Deception parameter estimation and discrimination in distributed multiple-radar architectures. IEEE Sens. J. 2017, 17, 6322–6330. [Google Scholar] [CrossRef]
- Ahmed, A.; Zhang, Y.D.; Hassanien, A. Joint radar-communications exploiting optimized OFDM waveforms. Remote Sens. 2021, 13, 4376. [Google Scholar] [CrossRef]
- Zhang, S.Y.; Zhou, Y.; Zhang, L.R.; Zhang, Q.Y.; Du, L. Target detection for multistatic radar in the presence of deception jamming. IEEE Sens. J. 2021, 21, 8130–8141. [Google Scholar] [CrossRef]
- Ma, B.T.; Chen, H.W.; Sun, B.; Xiao, H.T. A joint scheme of antenna selection and power allocation for localization in MIMO radar sensor networks. IEEE Commun. Lett. 2014, 18, 2225–2228. [Google Scholar] [CrossRef]
- Wang, X.; Hu, B. A low-complexity ML estimator for carrier and sampling frequency offsets in OFDM systems. IEEE Commun. Lett. 2014, 18, 503–506. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localization accuracy gain in MIMO radar-based systems. IEEE Trans. Inf. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef]
- Zhang, H.W.; Liu, W.J.; Zong, B.F.; Shi, J.P.; Xie, J.W. An efficient power allocation strategy for maneuvering target tracking in cognitive MIMO radar. IEEE Trans. Signal Process. 2021, 69, 1591–1602. [Google Scholar] [CrossRef]
- Yan, J.K.; Pu, W.Q.; Liu, H.W.; Jiu, B.; Bao, Z. Robust chance constrained power allocation scheme for multiple target localization in MIMO radar system. IEEE Trans. Signal Process. 2018, 66, 3946–3957. [Google Scholar] [CrossRef]
- Shi, C.G.; Wang, F.; Sellathurai, M.; Zhou, J.J.; Salous, S. Low probability of intercept-based optimal power allocation scheme for an integrated multistatic radar and communication system. IEEE Syst. J. 2020, 14, 983–994. [Google Scholar] [CrossRef]
- Yan, J.K.; Liu, H.W.; Pu, W.Q.; Zhou, S.H.; Liu, Z.; Bao, Z. Joint beam selection and power allocation for multiple target tracking in netted colocated MIMO radar system. IEEE Trans. Signal Process. 2016, 64, 6417–6427. [Google Scholar] [CrossRef]
- Shi, C.; Wang, Y.; Salous, S.; Zhou, J.; Yan, J. Joint transmit resource management and waveform selection strategy for target tracking in distributed phased array radar network. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 2762–2778. [Google Scholar] [CrossRef]
- Godrich, H.; Petropulu, A.P.; Poor, H.V. Sensor selection in distributed multiple-radar architectures for localization: A knapsack problem formulation. IEEE Trans. Signal Process. 2012, 60, 247–260. [Google Scholar] [CrossRef]
- Zhang, H.W.; Xie, J.W.; Shi, J.P.; Zhang, Z.J.; Fu, X.L. Sensor scheduling and resource allocation in distributed MIMO radar for joint target tracking and detection. IEEE Access 2019, 7, 62387–62400. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Index | Target 1 | Target 2 | Target 3 | Target 4 |
|---|---|---|---|---|
| Position (km) | (55,62) | (59,51) | (65,56) | (62,70) |
| RCS (m2) | 1 | 1 | 1 | 1 |
| Deception distance (km) | 0 | 1.5 | 0 | 2.5 |
| Case 1 | Target 1 | Target 2 | Target 3 | Target 4 | Case 2 | Target 1 | Target 2 | Target 3 | Target 4 |
| 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | ||
| 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | ||
| DP | 0.14 | 0.72 | 0.12 | 0.85 | DP | 0.07 | 0.74 | 0.16 | 0.92 |
| Case 3 | Target 1 | Target 2 | Target 3 | Target 4 | Case 4 | Target 1 | Target 2 | Target 3 | Target 4 |
| 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | ||
| 1 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | ||
| DP | 0.48 | 0.88 | 0.11 | 0.74 | DP | 0.73 | 0.87 | 0.13 | 0.88 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Xie, J.; Liu, W.; Zhang, H.; Xiang, H. Transmit Antenna Selection and Power Allocation for Joint Multi-Target Localization and Discrimination in MIMO Radar with Distributed Antennas under Deception Jamming. Remote Sens. 2022, 14, 3904. https://doi.org/10.3390/rs14163904
Li Z, Xie J, Liu W, Zhang H, Xiang H. Transmit Antenna Selection and Power Allocation for Joint Multi-Target Localization and Discrimination in MIMO Radar with Distributed Antennas under Deception Jamming. Remote Sensing. 2022; 14(16):3904. https://doi.org/10.3390/rs14163904
Chicago/Turabian StyleLi, Zhengjie, Junwei Xie, Weijian Liu, Haowei Zhang, and Houhong Xiang. 2022. "Transmit Antenna Selection and Power Allocation for Joint Multi-Target Localization and Discrimination in MIMO Radar with Distributed Antennas under Deception Jamming" Remote Sensing 14, no. 16: 3904. https://doi.org/10.3390/rs14163904
APA StyleLi, Z., Xie, J., Liu, W., Zhang, H., & Xiang, H. (2022). Transmit Antenna Selection and Power Allocation for Joint Multi-Target Localization and Discrimination in MIMO Radar with Distributed Antennas under Deception Jamming. Remote Sensing, 14(16), 3904. https://doi.org/10.3390/rs14163904