
A Ship Discrimination Method Based on High-Frequency Electromagnetic Theory


Abstract
:1. Introduction
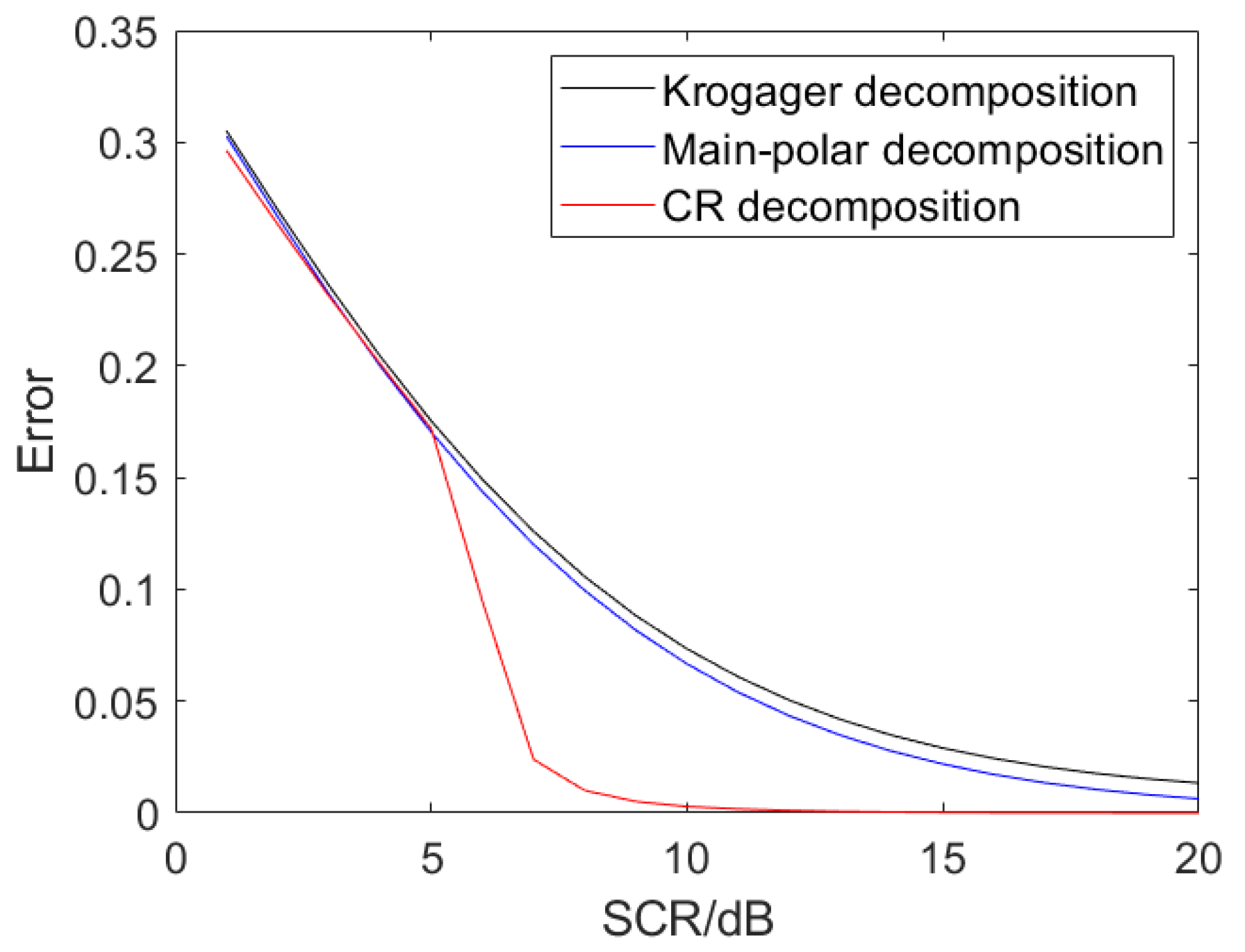
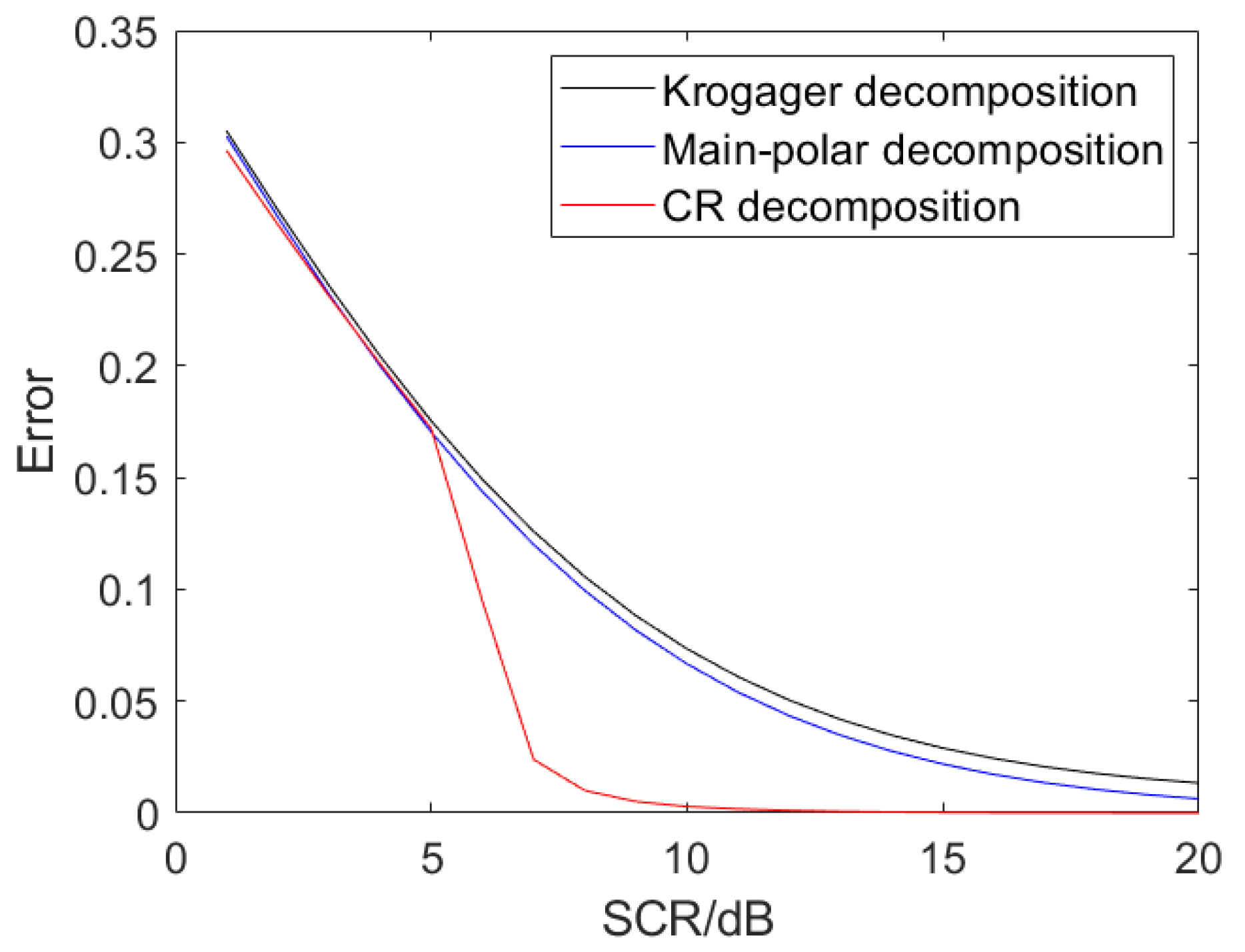
- The CR decomposition based on the main polarization. For the basic scattering of CR, the Krogager decomposition [27,28,29] has three assumptions, as presented in Section 3, which would increase the coefficient errors of odd scattering and even scattering as SCR decreases. To cure the above problem, this paper deduces the SR, DR, and TR of CR with the electromagnetic theory, and proposes a novel CR decomposition based on the main polarization, which could accurately obtain the coefficients of odd scattering and even scattering in clutter.
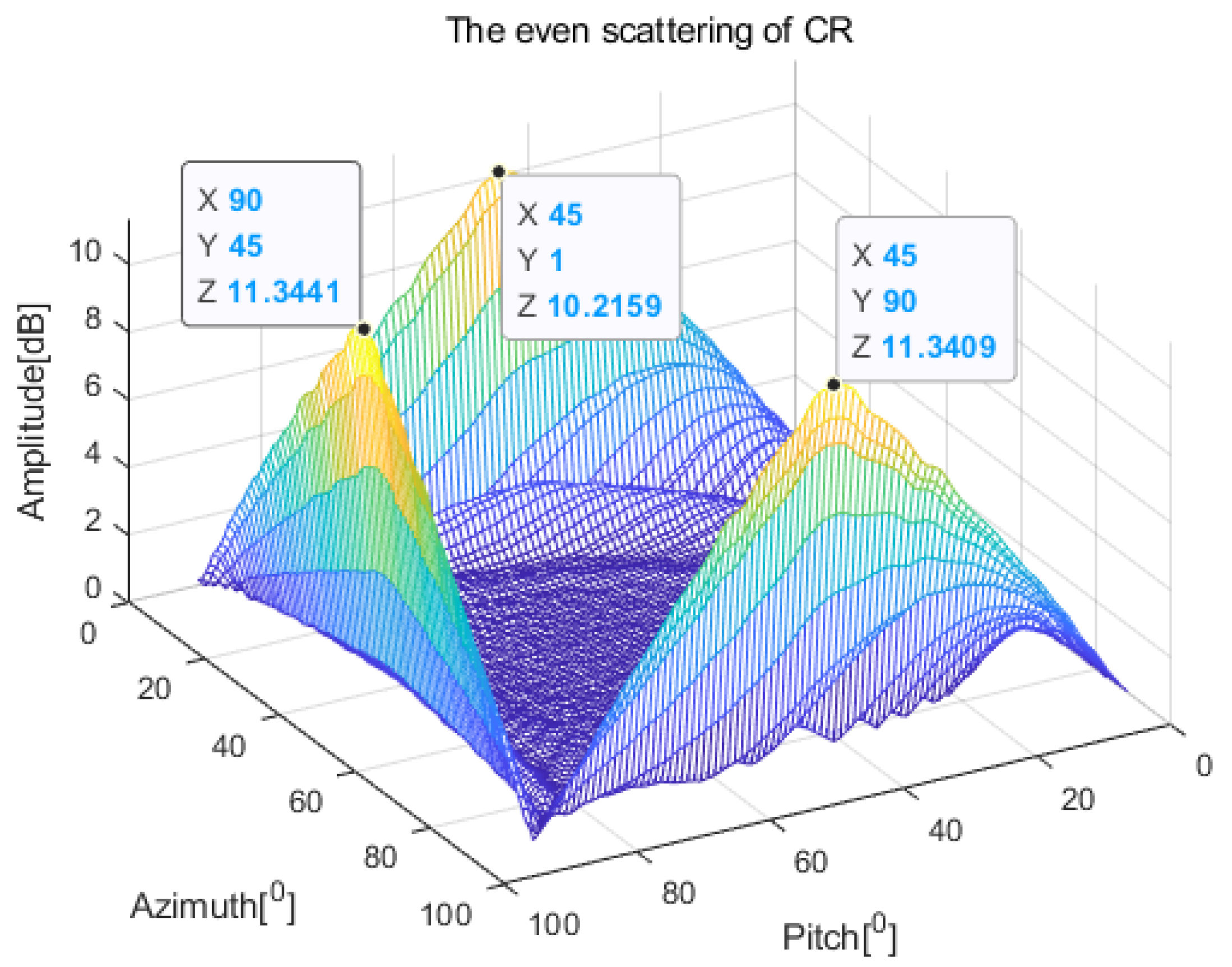
- The multi-dimensional characteristic of CR. Aiming at the one-dimensional characteristic of CR and the ship, the characteristics of HRRP [8,9,10,11,12,13,14], micro-Doppler [23,24,25,26], polarization [27,28,29,30,31,32] are separately analyzed. For the multi-dimensional characteristic, only the authors in [33] comprehensively analyzed HRRP and polarization. However, its multi-dimensional characteristic is only a superposition of characteristic quantities, and does not consider the interaction between characteristics. Therefore, this paper introduces the definition of the main scattering polarization (MSP), and gives the multi-dimensional characteristic of CR based on the polarization and angle, i.e., the amplitude of MSP is a single-peak curve when the azimuth or pitch angle of an incident wave is monotonic within 35° without clutter. Based on the above property, the multi-characteristic between the ship and CR would not be affected by the angle of the incident wave, which is more applicable.
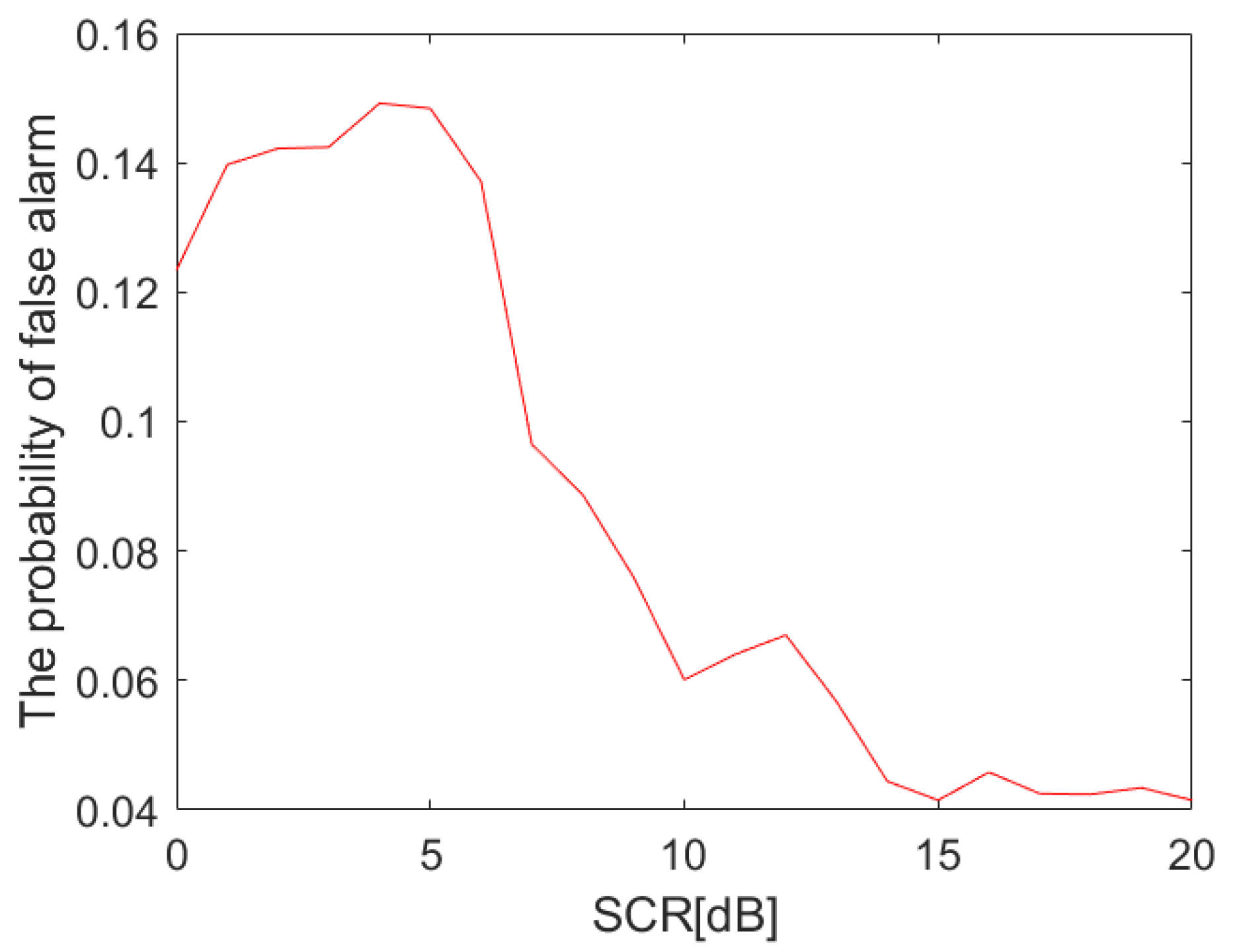
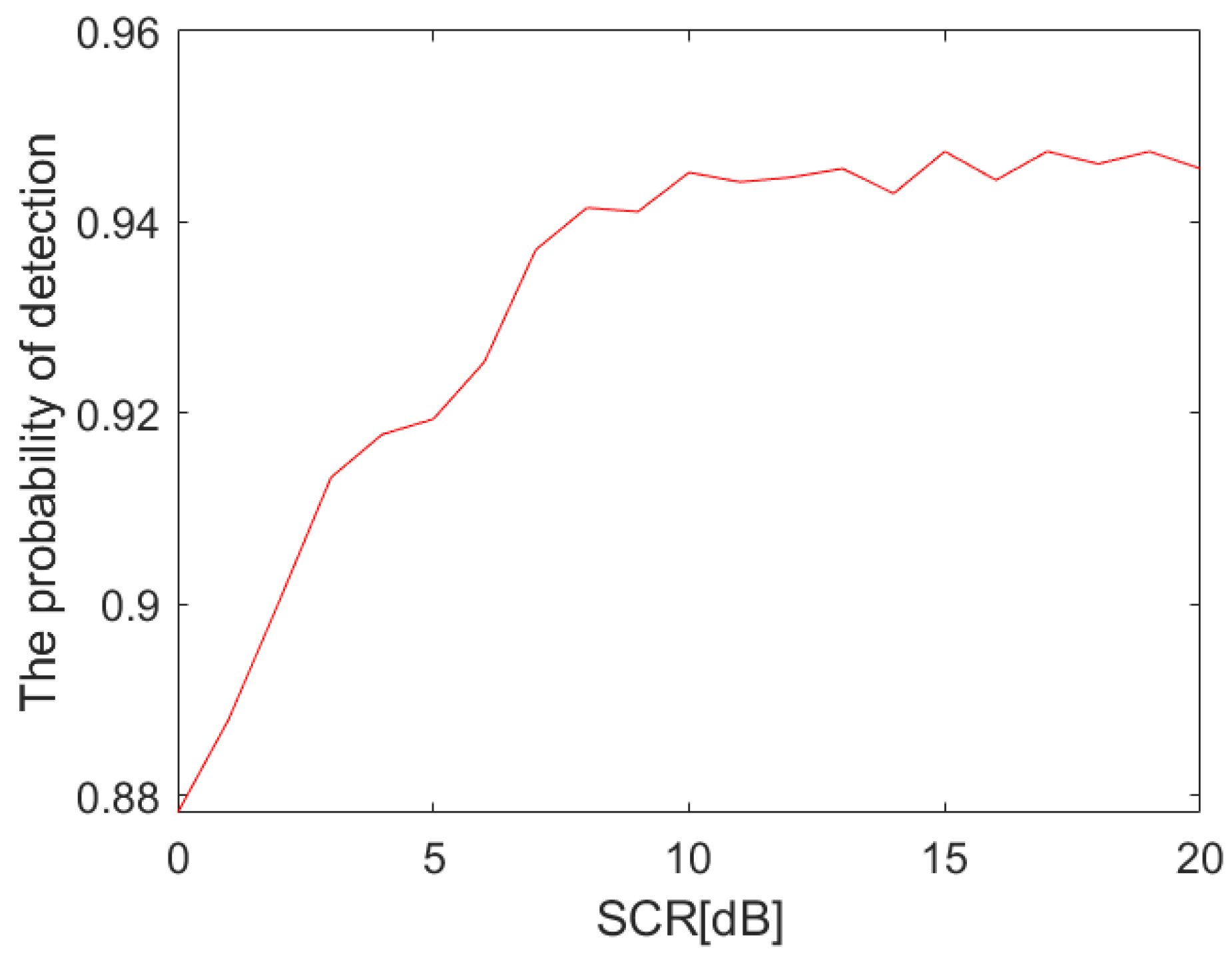
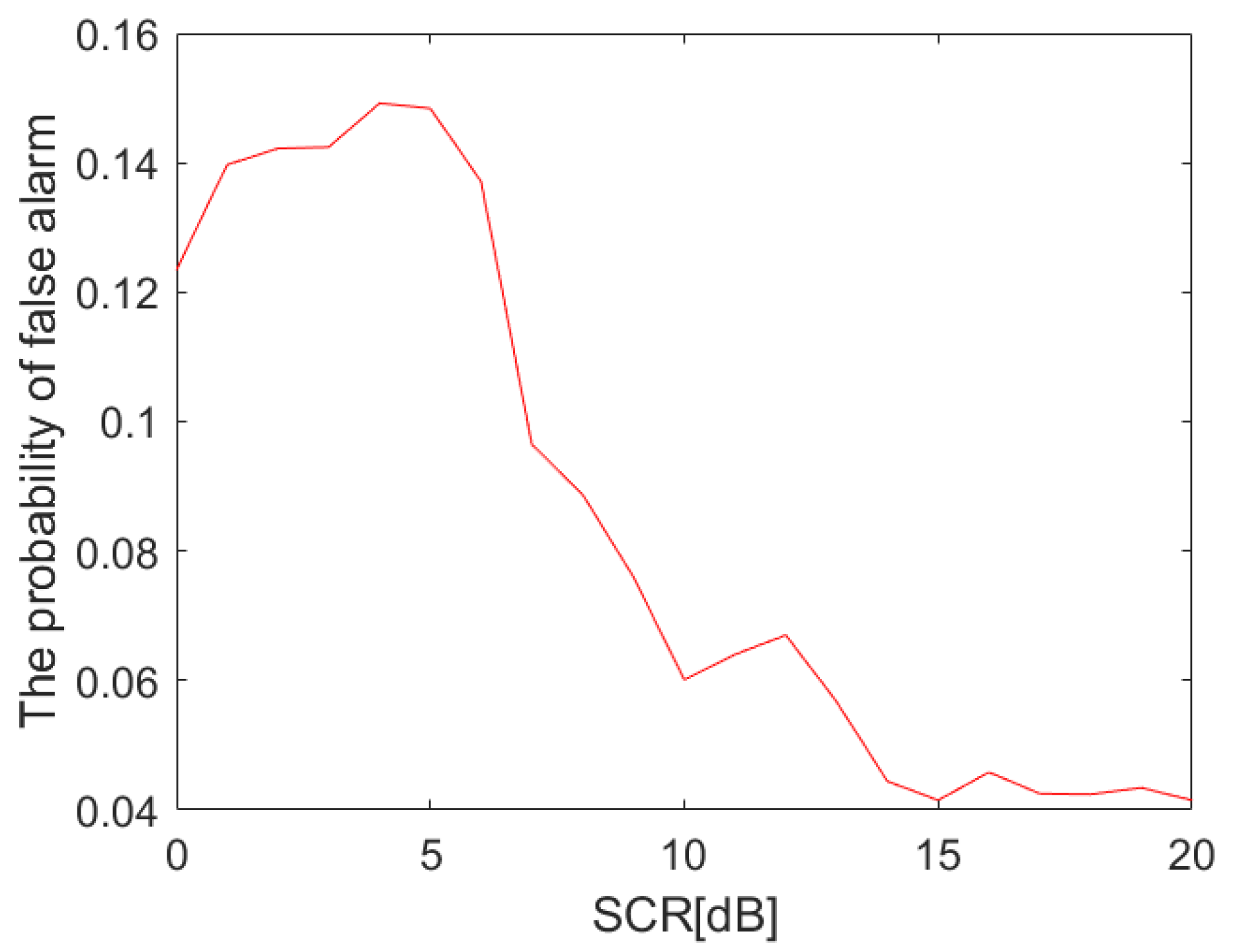
- The CR discrimination based on the TSP joint domains. In contrast to References [8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,42], we focus on analyzing the characteristic changes of a target during the radar movement, rather than being limited to a fixed pulse. That is, this paper utilizes multiple pulses for discrimination. Based on the three-dimensional proportional guidance method with the angle constraint, this paper gives the spatial-time characteristic of the radar, i.e., the azimuth and pitch angles of a radar’s line of sight (LOS) change monotonically as the radar approaches the ship. Subsequently, we introduce a definition of the CR-MSE parameter, and propose a novel CR discrimination method based on the TSP joint domains, which can achieve 95% discrimination probability and a 4.1% false alarm probability.
2. The Scattering Model of CR
2.1. Single Reflection
2.2. Double Reflection
2.3. Triple Reflection
3. The CR Decomposition Based on the Main-Polarization
- It assumes that the helix scattering is a noise after removing the odd scattering and even scattering, whereas the helix scattering is poorly representative of clutter;
- It assumes that the relative phase of dihedral scattering and helix scattering is 0;
- It assumes that the dihedral scattering only has a single dihedral scattering. Since there are three kinds of dihedral scatterings in trihedral CR, the dihedral scattering in Equation (34) cannot characterize the even scattering of CR.
4. The CR Discrimination Method Based on TSP Joint Domains
4.1. The Polarization Characteristic
4.2. The Spatial–Time Characteristic
4.3. The Discrimination Method
5. Simulation
5.1. The CR Polarization Characteristic
5.2. The CR Discrimination Method
5.3. The Comparisons of the Proposed Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The Polarization Characteristic

References
- Cerutti-Maori, D.; Klare, J.; Brenner, A.R.; Ende, J.H.G. Wide-area traffic monitoring with the SAR/GMTI system PAMIR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3019–3030. [Google Scholar] [CrossRef]
- Renga, A.; Graziano, M.D.; Moccia, A. Segmentation of marine SAR images by sublook analysis and application to sea traffic monitoring. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1463–1477. [Google Scholar] [CrossRef]
- Gao, G.; Wang, X.; Lai, T. Detection of moving ships based on a combination of magnitude and phase in along-track interferometric SAR—Part II: Statistical modeling and CFAR detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3582–3599. [Google Scholar] [CrossRef]
- Shi, L.; Li, P.X.; Yang, J.; Zhang, L.P.; Ding, X.L.; Zhao, L.L. Polarimetric SAR calibration and residual error estimation when corner reflectors are unavailable. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4454–4471. [Google Scholar] [CrossRef]
- Luo, Y.; Guo, L.X.; Zuo, Y.C.; Liu, W. Time-domain scattering characteristics and jamming effectiveness in corner reflectors. IEEE Access 2020, 9, 15696–15707. [Google Scholar] [CrossRef]
- Baffelli, S.; Frey, O.; Werner, C.; Hajnsek, I. Polarimetric calibration of the Ku-band advanced polarimetric radar interferometer. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2295–2311. [Google Scholar] [CrossRef]
- Sarabandi, K.; Chiu, T.C. Optimum corner reflectors for calibration of imaging radars. IEEE Trans. Antennas Propag. 1996, 44, 1348–1361. [Google Scholar] [CrossRef]
- Tao, Z.Y.; Yu, G.; Fu, Q. Discrimination method of ship and corner reflector based on SVM. In Proceedings of the IEEE Sixth International Conference on Instrumentation and Measurement, Harbin, China, 21–23 July 2016. [Google Scholar]
- Shi, Z.G.; Fu, Q. Study on the electromagnetic signature analysis and discrimination method of ship targets and outboard jamming. J. Hunan Univ. Sci. Technol. 2004, 19, 70–73. [Google Scholar]
- Zhang, R.W.; Li, Y.P.; Jiao, Y.F. Waveform selection of active radar seeker for anti-corner-reflector-interference. Electron. Opt. Control 2015, 22, 20–24. [Google Scholar] [CrossRef]
- Cui, K.B.; Wei, W.; Xi, C.; Yuan, N.C. A kind of method of anti-corner reflector interference for millimeter wave high resolution radar system. In Proceedings of the 2016 Progress in Electromagnetic Research Symposium, Shanghai, China, 8–11 August 2016. [Google Scholar]
- Yuan, W. Passive fake target recognition based on one-dimensional distance image sparse representation. Telecommun. Eng. 2018, 58, 798–804. [Google Scholar]
- Zhang, J.; Hu, S.L.; Yang, Q.; Fan, X.M. RCS statistical features and recognition model of air-floating corner reflector. Syst. Eng. Electron. 2019, 41, 780–786. [Google Scholar]
- Yuan, H.D.; Fu, X.J.; Zhao, C.X.; Xie, M.; Gao, X.Y. Ship and corner reflector identification based on extreme learning machine. In Proceedings of the IEEE International Conference on Signal, Information and Data Processing, Chongqing, China, 11–13 December 2019. [Google Scholar]
- Zhu, Z.Z.; Tang, G.F.; Cheng, Z.; Huang, P.K. Discrimination method of ship and corner reflector based on polarization decomposition. Shipboard Electron. Countermeas. 2010, 33, 15–21. [Google Scholar]
- Zhang, J.; Hu, S.L.; Fan, X.M.; He, J.B. Optimization of the position situation of the air-floating corner reflector based on HRRP and PA. Tactical Missile Technol. 2018, 3, 105–109. [Google Scholar]
- Zhang, J.; Hu, S.L.; Yang, Q.; Fan, X.M.; He, J.B. Optimization of position situation of air-floating corner reflectors based on similarity of RCS amplitude characteristic. J. Nav. Univ. Eng. 2019, 31, 32–36. [Google Scholar]
- Zhang, J.; Hu, S.L.; Wu, L.G.; Fan, X.M.; Yang, Q. Air-floating corner reflectors dilution jamming placement position. In Proceedings of the IEEE 8th Data Driven Control and Learning Systems Conference, Dali, China, 24–27 May 2019. [Google Scholar]
- Chen, V.C. Micro-doppler effect in radar: Phenomenon, model, and simulation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Chen, V.C. High frequency scattering from trihedral corner reflectors and other benchmark targets SBR versus experiment. In The Micro-Doppler Effect in Radar; Artech House: Boston, MA, USA; London, UK, 2011; pp. 35–36. [Google Scholar]
- Graeme, E.S.; Karl, W. Radar micro-doppler signature classification using dynamic time warping. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1078–1096. [Google Scholar]
- Wang, L.; Liu, H.W. Method for micro-motion target recognition and motion parameter extraction based on time-frequency analysis. J. Electron. Inf. Technol. 2010, 32, 1812–1817. [Google Scholar] [CrossRef]
- Huang, M.J.; Chen, J.J.; Zhao, H.Z.; Fu, Q. Micro-doppler modeling and simulation of corner reflector in sea surface. Syst. Eng. Electron. 2012, 34, 1781–1787. [Google Scholar]
- Huang, M.J.; Zhao, H.Z.; Fu, Q.; Feng, G.Y. A sea corner-reflector jamming identification method based on micro-doppler feature. J. Astronaut. 2012, 33, 1486–1491. [Google Scholar]
- Tao, Z.Y.; Fu, Q. Discrimination method of ship and corner reflector based on micro-doppler feature. In Proceedings of the 2016 International Conference on Computer Engineering, Information Science and Application Technology, Guilin, China, 24–25 September 2016. [Google Scholar]
- Zhu, H.; Wang, Q.P.; Pan, Y.J.; Tai, N.; Yuan, N.C. A sea corner-reflector jamming identification method based on time-frequency feature. In Proceedings of the IEEE International Conference on Signal Processing, Ningbo, China, 19–22 September 2015. [Google Scholar]
- Tu, J.H.; Tang, G.F.; Xiao, H.T.; Xu, C. A study of anti-corner reflector based on polarization decomposition. Radar Sci. Technol. 2009, 7, 85–90. [Google Scholar]
- Fang, M.J. Study on the Suppression of Compound Jamming Based on Polarization Coherent Radar; National University of Defense Technology: Changsha, China, 2013. [Google Scholar]
- Fang, M.J.; Zhu, Y.F.; Huang, M.J.; Fu, Q. Sea surface target polarization feature extraction based on modified odd-time and even-time scattering models. In Proceedings of the IEEE 2nd International Conference on Measurement, Information and Control, Harbin, China, 16–18 August 2013. [Google Scholar]
- Wang, W.Q. Radar ECM and ECCM Simulations; Beijing Institute of Technology: Beijing, China, 2016. [Google Scholar]
- Wang, W.Q.; Liu, K.; Zou, B.; Huang, Y.; Jiang, L.Z.; Hu, X. An Anti-Interference Method Based on Polarized Radar Corner Reflector. China Patent No. CN201710712673.3, 18 August 2017. [Google Scholar]
- Liang, Z.R.; Wang, Y.; Zhang, X.F.; Xie, M.; Fu, X.J. Identification of ship and corner reflector in sea clutter environment. In Proceedings of the IEEE 15th International Conference on Signal Processing, Beijing, China, 6–9 December 2020. [Google Scholar]
- Li, B.D.; Zhang, Z.J.; Jiang, J.; Xu, Y.Z.; Zhang, T.J.; Shi, J.N.; Chen, Y. An Interference Countermeasure Method for Sea Surface Corner Reflector Assisted by Polarization Characteristics. China Patent No. 201911227720.0, 4 December 2019. [Google Scholar]
- Knoit, E. RCS reduction of dihedral corners. IEEE Trans. Antennas Propag. 1977, 25, 406–409. [Google Scholar] [CrossRef]
- Griesser, T.; Balanis, C. Backscatter analysis of dihedral corner reflectors using physical optics and the physical theory of diffraction. IEEE Trans. Antennas Propag. 1987, 35, 1137–1147. [Google Scholar] [CrossRef]
- Griesser, T.; Balanis, C. Dihedral corner reflectors backscatter using higher order reflections and differactions. IEEE Trans. Antennas Propag. 1987, 35, 1235–1247. [Google Scholar] [CrossRef]
- Baldauf, J.; Lee, S.W.; Lin, L.; Jeng, S.K.; Scarborough, S.M.; Yu, C.L. High frequency scattering from trihedral corner reflectors and other benchmark targets SBR versus experiment. IEEE Trans. Antennas Propag. 1991, 39, 1345–1351. [Google Scholar] [CrossRef]
- Jackson, J.A.; Rigling, B.D.; Moses, R.L. Canonical scattering feature models for 3D and bistatic SAR. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 525–541. [Google Scholar] [CrossRef]
- Kubicke, G.; Bourlier, C.; Saillard, J. High-Frequency bistatic scattering by depolarizing, nearly omnidirectional reflectors higher order polyhedral reflectors. IEEE Trans. Antennas Propag. 2008, 56, 3029–3035. [Google Scholar] [CrossRef]
- Jackson, J.A. Analytic physical optics solution for bistatic, 3D scattering from a dihedral corner reflector. IEEE Trans. Antennas Propag. Lett. 2012, 60, 1486–1495. [Google Scholar] [CrossRef]
- He, Y.; He, H.; Hu, C.; Yin, J.; Yang, J. Polarization analysis of trihedral corner reflector with high-frequency approximation. IEEE Trans. Antennas Propag. 2022. ahead of print. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, S.L.; Yang, Q.; Wu, L.G. Study on composite electromagnetic scattering characteristics of air-floating corner reflector and chaff. In Proceedings of the 12th International Conference on Intelligent Computation Technology and Automation, Xiangtan, China, 26–27 October 2019. [Google Scholar]
- Wu, J.; Khamas, S.K.; Cook, G.G. Analysis of a conformal archimedean spiral antenna printed within layered dielectric cylindrical media using the method of moments. IEEE Trans. Antennas Propag. 2012, 60, 3967–3971. [Google Scholar] [CrossRef]
- Sun, Q.; Ren, Q.; Zhan, Q.; Liu, Q.H. 3-D domain decomposition based hybrid finite-difference time-domain/finite-element time-domain method with nonconformal meshes. IEEE Trans. Microw. Theory Tech. 2017, 65, 3682–3688. [Google Scholar] [CrossRef]
- Feray, H.; Levent, S.; Pyotr, Y.U. On the modified theory of physical optics. IEEE Trans. Antennas Propag. 2013, 61, 6115–6119. [Google Scholar]
- Silver, S. Microwave Antenna Theory and Design; McGraw-Hill Book Company: New York, NY, USA, 1949. [Google Scholar]
- Gordo, W.B. Far-field approximations to the kirchoff-helmholtz resentations of scattered fields. IEEE Trans. Antennas Propag. 1975, 23, 590–592. [Google Scholar] [CrossRef]
- Ling, H.; Chou, R.C.; Lee, S.W. Shooting and bouncing rays: Calculating the RCS of an arbitrarily shaped cavity. IEEE Trans. Antennas Propag. 1989, 37, 194–205. [Google Scholar] [CrossRef]
- Krogager, E.; Czyz, Z.H. Properties of the sphere, diplance, helix decomposition. In Proceedings of the 3rd International Workshop Radar Polarization, Nantes, France, 21–23 March 1995. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basic to Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Huynen, J.R. Phenomenological Theory of Radar Targets. Ph.D. Thesis, Technical University, Delft, The Netherlands, 1970. [Google Scholar]
- Yang, J.; Yamaguchi, Y.; Yamada, H. On modified Huynen’s decomposition of a Kennaugh matrix. IEEE Geosci. Remote Sens. Lett. 2006, 3, 369–372. [Google Scholar] [CrossRef]
- Balanis, C.; Polka, L.A. High-Frequency Techniques for RCS Prediction of Plate Geometries; Arizona State University Technical Report; NASA: Washington, DC, USA, 1993. [Google Scholar]
- Balanis, C.; Polycarpou, A.C. A physical optics/equivalent currents model for the RCS of trihedral corner reflectors. In Its RCS Analysis of Plate Geometries; NASA: Washington, DC, USA, 1993; Parts 1 and 2; pp. 22–41. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 1 | 2 | |
|---|---|---|---|
| Number | 9607 | 379 | 14 |
| Type | The Initial LOS | The Velocity of Radar | The Velocity of Ship |
|---|---|---|---|
| Azimuth | |||
| Pitch |
| Probability | HRRP Method | Polarization Method | TSP Method |
|---|---|---|---|
| Discrimination | |||
| False alarm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Yang, H.; He, H.; Yin, J.; Yang, J. A Ship Discrimination Method Based on High-Frequency Electromagnetic Theory. Remote Sens. 2022, 14, 3893. https://doi.org/10.3390/rs14163893
He Y, Yang H, He H, Yin J, Yang J. A Ship Discrimination Method Based on High-Frequency Electromagnetic Theory. Remote Sensing. 2022; 14(16):3893. https://doi.org/10.3390/rs14163893
Chicago/Turabian StyleHe, Yaomin, Huizhang Yang, Huafeng He, Junjun Yin, and Jian Yang. 2022. "A Ship Discrimination Method Based on High-Frequency Electromagnetic Theory" Remote Sensing 14, no. 16: 3893. https://doi.org/10.3390/rs14163893
APA StyleHe, Y., Yang, H., He, H., Yin, J., & Yang, J. (2022). A Ship Discrimination Method Based on High-Frequency Electromagnetic Theory. Remote Sensing, 14(16), 3893. https://doi.org/10.3390/rs14163893